文档内容
秘籍 01 运动图像问题和追及相遇问题
一、运动图像问题
对运动图象的认识和理解,应注意以下三点:
(1)无论是xt图象还是vt图象都只能描述直线运动.
(2)xt图象和vt图象不表示物体运动的轨迹,x、v与t一一对应.
(3)一般试题中,关键点是根据斜率判断物体的运动状况,xt图象的斜率表示物体运动的
速度,根据xt图象的斜率判断速度变化情况;vt图象的斜率表示物体运动的加速度,根据vt
图象的斜率判断加速度的变化情况.
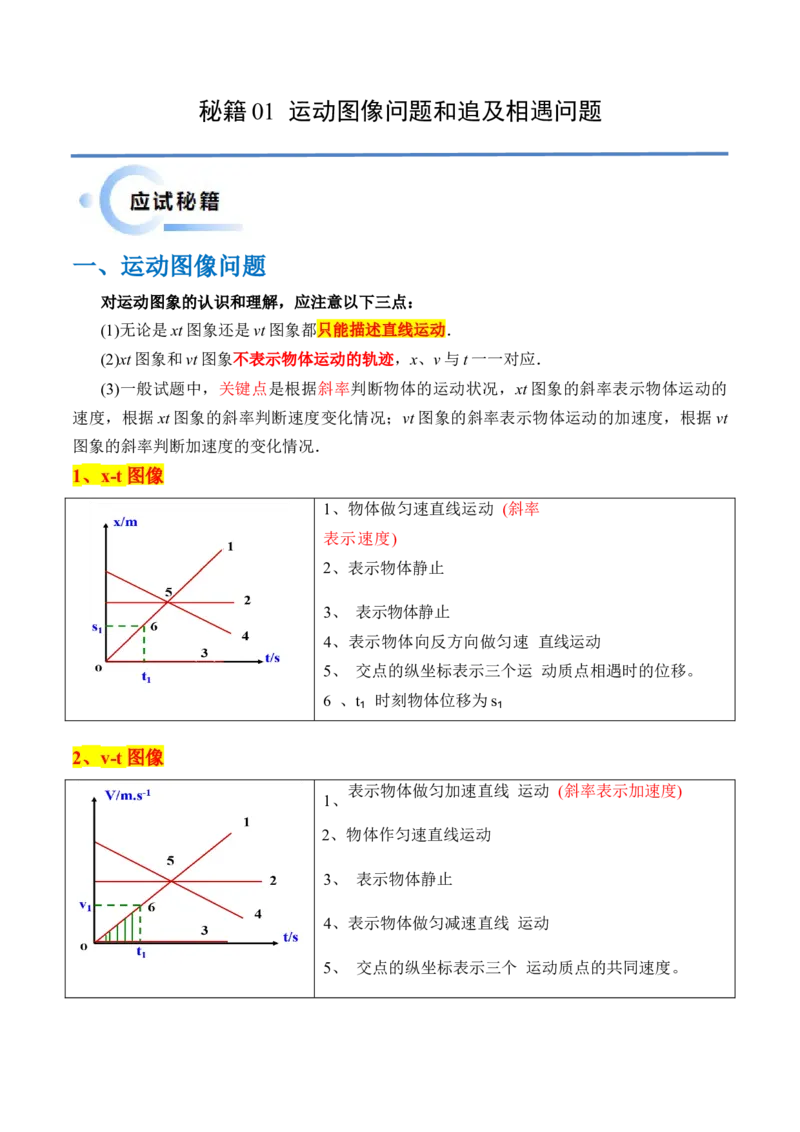
1、x-t图像
1、物体做匀速直线运动 (斜率
表示速度)
2、表示物体静止
3、 表示物体静止
4、表示物体向反方向做匀速 直线运动
5、 交点的纵坐标表示三个运 动质点相遇时的位移。
6 、t₁ 时刻物体位移为s₁
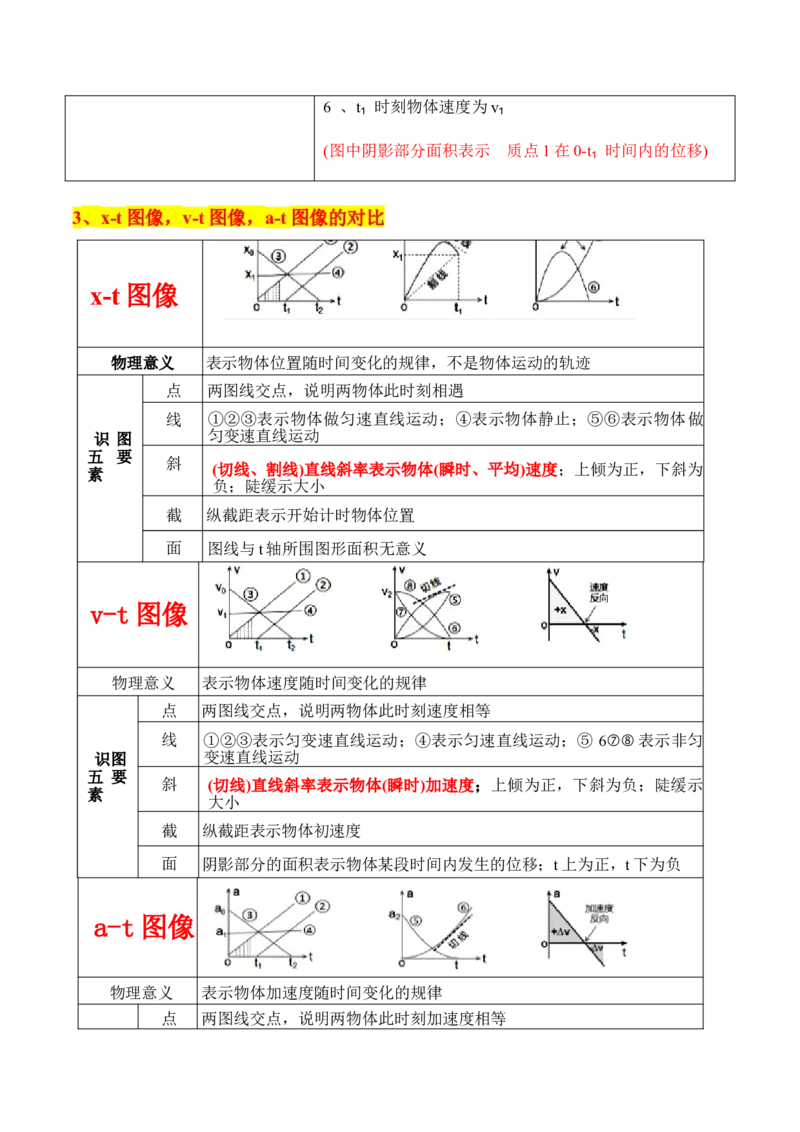
2、v-t图像
表示物体做匀加速直线 运动 (斜率表示加速度)
1、
2、物体作匀速直线运动
3、 表示物体静止
4、表示物体做匀减速直线 运动
5、 交点的纵坐标表示三个 运动质点的共同速度。6 、t₁ 时刻物体速度为v₁
(图中阴影部分面积表示 质点1在0-t₁ 时间内的位移)
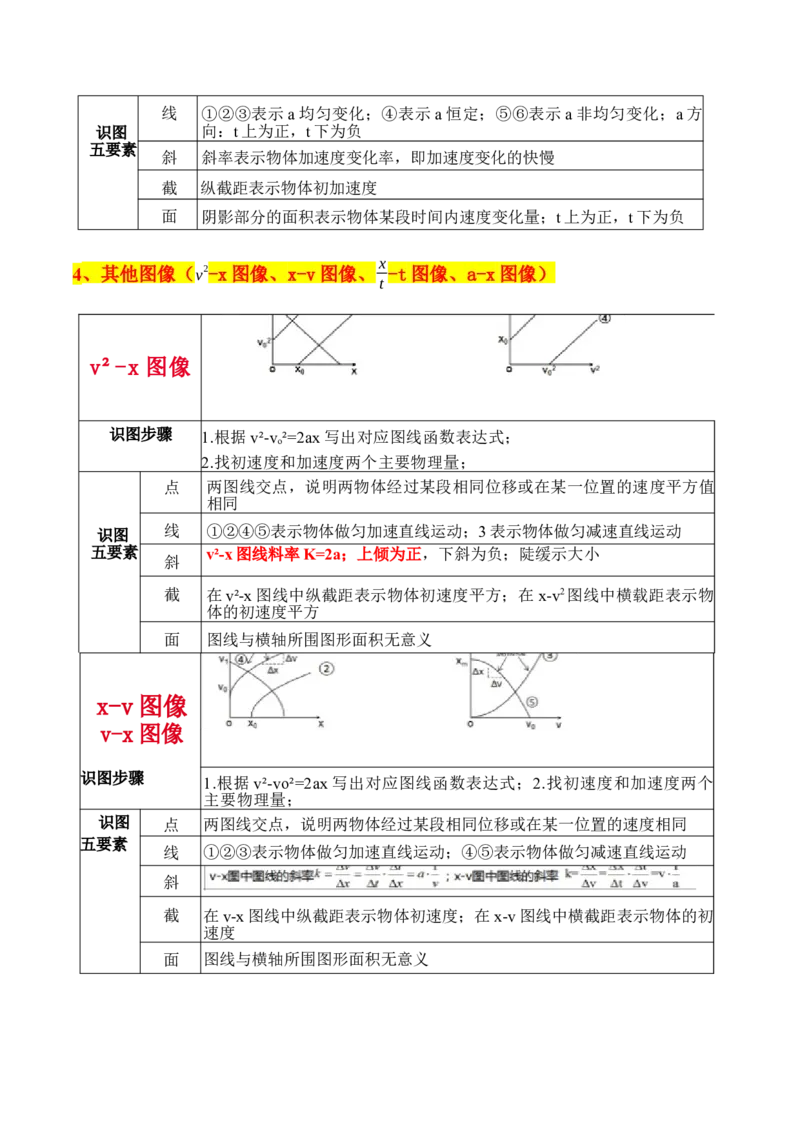
3、x-t图像,v-t图像,a-t图像的对比
x-t 图像
物理意义 表示物体位置随时间变化的规律,不是物体运动的轨迹
点 两图线交点,说明两物体此时刻相遇
线 ①②③表示物体做匀速直线运动;④表示物体静止;⑤⑥表示物体做
识 图 匀变速直线运动
五 要
斜
素
(切线、割线)直线斜率表示物体(瞬时、平均)速度;上倾为正,下斜为
负;陡缓示大小
截 纵截距表示开始计时物体位置
面 图线与t轴所围图形面积无意义
v-t 图像
物理意义 表示物体速度随时间变化的规律
点 两图线交点,说明两物体此时刻速度相等
线 ①②③表示匀变速直线运动;④表示匀速直线运动;⑤ 6⑦⑧表示非匀
识图 变速直线运动
五 要
斜 (切线)直线斜率表示物体(瞬时)加速度;上倾为正,下斜为负;陡缓示
素
大小
截 纵截距表示物体初速度
面 阴影部分的面积表示物体某段时间内发生的位移;t上为正,t下为负
a-t 图像
物理意义 表示物体加速度随时间变化的规律
点 两图线交点,说明两物体此时刻加速度相等线 ①②③表示a均匀变化;④表示 a恒定;⑤⑥表示a非均匀变化;a方
识图 向:t上为正,t下为负
五要素
斜 斜率表示物体加速度变化率,即加速度变化的快慢
截 纵截距表示物体初加速度
面 阴影部分的面积表示物体某段时间内速度变化量;t上为正,t下为负
x
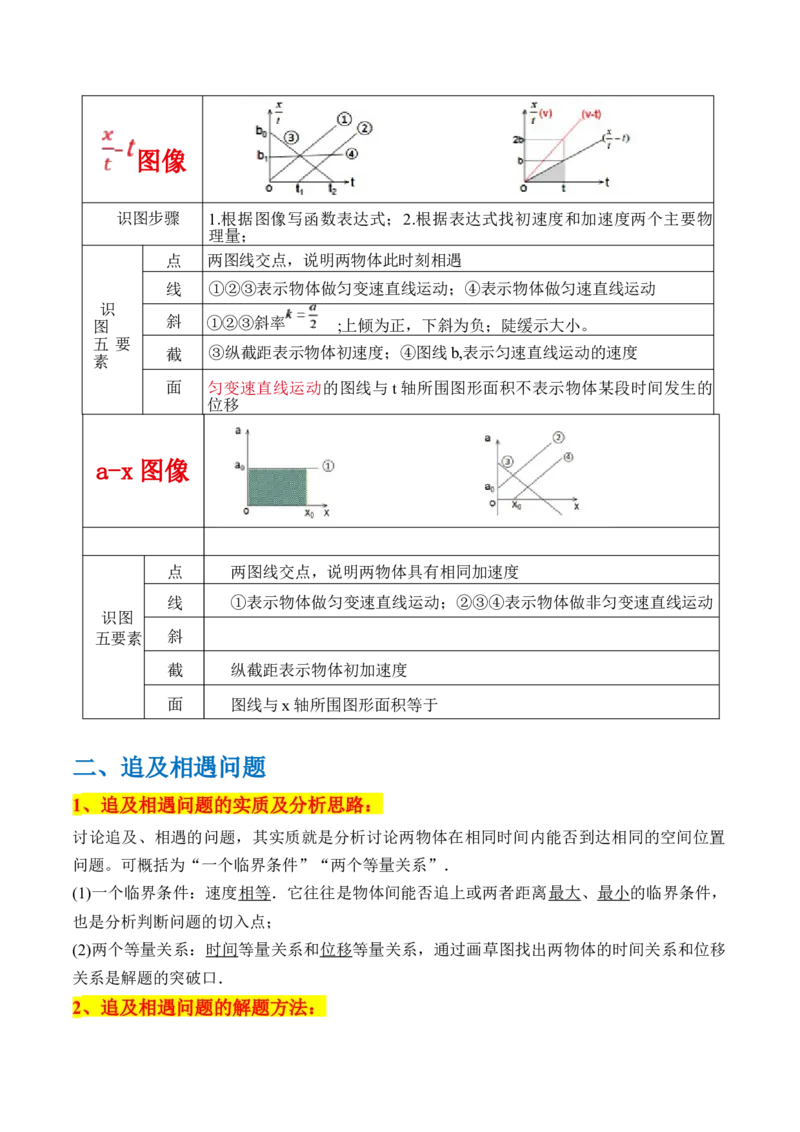
4、其他图像(v2-x图像、x-v图像、 -t图像、a-x图像)
t
v²-x 图像
识图步骤 1.根据v²-v ²=2ax写出对应图线函数表达式;
o
2.找初速度和加速度两个主要物理量;
点 两图线交点,说明两物体经过某段相同位移或在某一位置的速度平方值
相同
识图 线 ①②④⑤表示物体做匀加速直线运动;3表示物体做匀减速直线运动
五要素 v²-x图线料率K=2a;上倾为正,下斜为负;陡缓示大小
斜
截 在v²-x图线中纵截距表示物体初速度平方;在 x-v2图线中横载距表示物
体的初速度平方
面 图线与横轴所围图形面积无意义
x-v 图像
v-x 图像
识图步骤
1.根据v²-vo²=2ax写出对应图线函数表达式;2.找初速度和加速度两个
主要物理量;
识图 点 两图线交点,说明两物体经过某段相同位移或在某一位置的速度相同
五要素
线 ①②③表示物体做匀加速直线运动;④⑤表示物体做匀减速直线运动
斜
截 在v-x图线中纵截距表示物体初速度;在 x-v图线中横截距表示物体的初
速度
面 图线与横轴所围图形面积无意义图像
识图步骤 1.根据图像写函数表达式;2.根据表达式找初速度和加速度两个主要物
理量;
点 两图线交点,说明两物体此时刻相遇
线 ①②③表示物体做匀变速直线运动;④表示物体做匀速直线运动
识
图 斜 ①②③斜率 ;上倾为正,下斜为负;陡缓示大小。
五 要
截 ③纵截距表示物体初速度;④图线b,表示匀速直线运动的速度
素
面 匀变速直线运动的图线与t轴所围图形面积不表示物体某段时间发生的
位移
a-x 图像
点 两图线交点,说明两物体具有相同加速度
线 ①表示物体做匀变速直线运动;②③④表示物体做非匀变速直线运动
识图
五要素 斜
截 纵截距表示物体初加速度
面 图线与x轴所围图形面积等于
二、追及相遇问题
1、追及相遇问题的实质及分析思路:
讨论追及、相遇的问题,其实质就是分析讨论两物体在相同时间内能否到达相同的空间位置
问题。可概括为“一个临界条件”“两个等量关系”.
(1)一个临界条件:速度相等.它往往是物体间能否追上或两者距离最大、最小的临界条件,
也是分析判断问题的切入点;
(2)两个等量关系:时间等量关系和位移等量关系,通过画草图找出两物体的时间关系和位移
关系是解题的突破口.
2、追及相遇问题的解题方法:1.临界法
寻找问题中隐含的临界条件,例如速度小者加速追赶速度大者,在两物体速度相等时有最大
距离;速度大者减速追赶速度小者,若追不上则在两物体速度相等时有最小距离.
2.函数法
设两物体在t时刻相遇,然后根据位移关系列出关于t的方程x =x +x
A B 0
(1)若Δ>0有两解,说明两物体相遇两次;
(2)若Δ=0有一解,说明两物体相遇一次;
(3)若Δ<0无解,说明两物体不能相遇。
3.图象法
(1)若用位移图像求解,分别作出两个物体的位移图像,如果两个物体的位移图像相交,则说
明两物体相遇。
(2)若用速度图像求解,则注意比较速度图线与时间轴包围的面积。
【注意】xt图像的交点表示两物体相遇,而vt图像的交点只表示两物体此时速度相等。
【特别提醒】
若被追赶的物体做匀减速直线运动,一定要注意判断被追上前该物体是否已经停止运动.
3、追及问题的常见类型
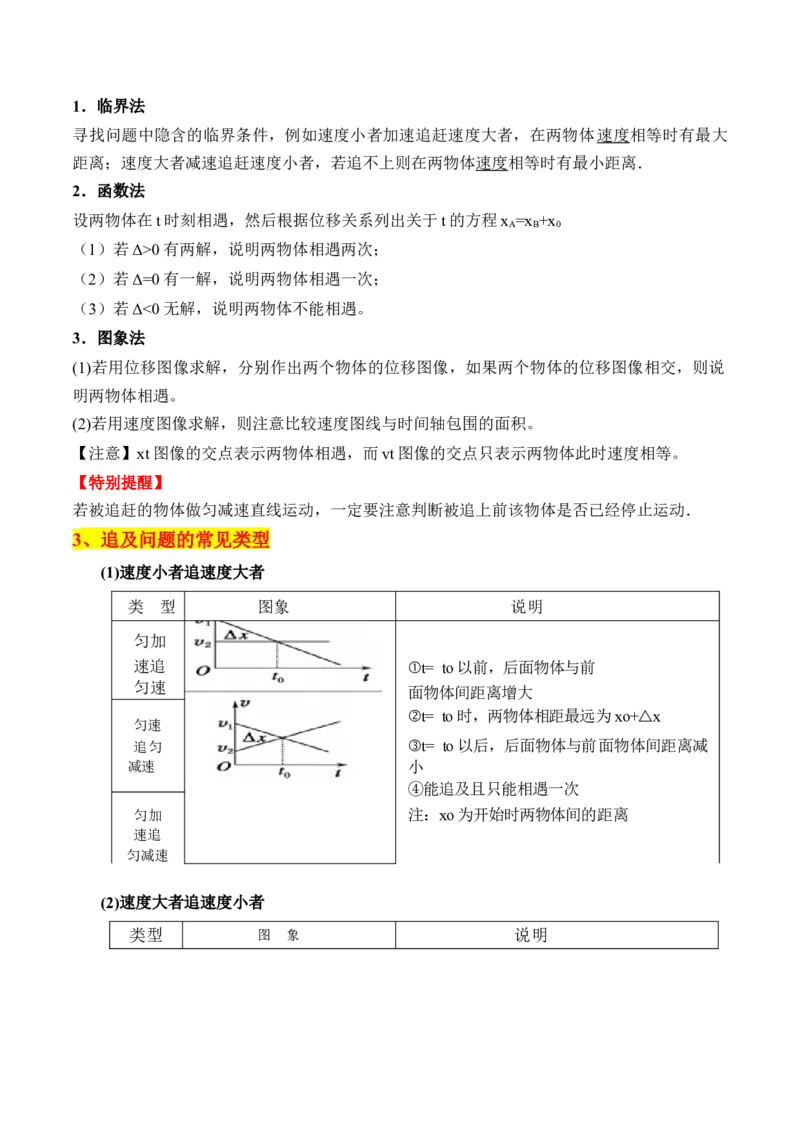
(1)速度小者追速度大者
类 型 图象 说明
匀加
速追 ①t= to以前,后面物体与前
匀速
面物体间距离增大
②t= to时,两物体相距最远为xo+△x
匀速
追匀 ③t= to以后,后面物体与前面物体间距离减
减速 小
④能追及且只能相遇一次
匀加 注:xo为开始时两物体间的距离
速追
匀减速
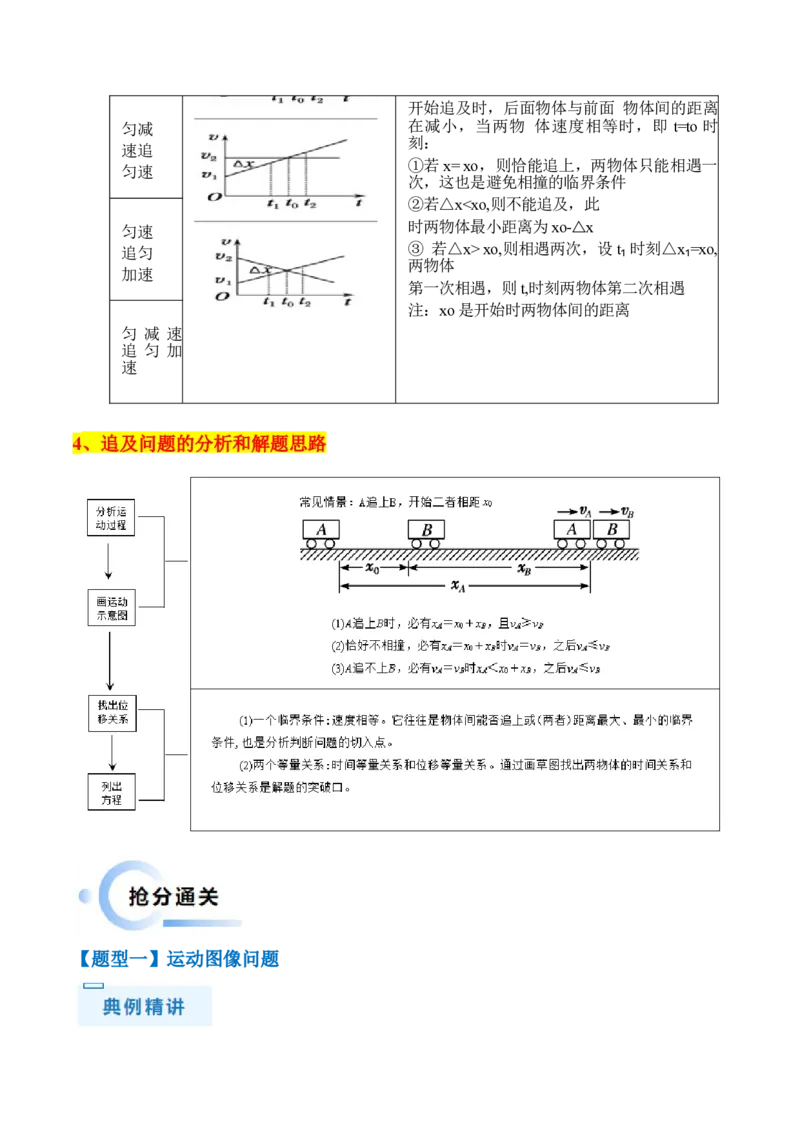
(2)速度大者追速度小者
类型 图 象 说明开始追及时,后面物体与前面 物体间的距离
匀减 在减小,当两物 体速度相等时,即 t=to 时
刻:
速追
①若x= xo,则恰能追上,两物体只能相遇一
匀速
次,这也是避免相撞的临界条件
②若△x xo,则相遇两次,设t₁时刻△x₁=xo,
两物体
加速
第一次相遇,则t,时刻两物体第二次相遇
注:xo是开始时两物体间的距离
匀 减 速
追 匀 加
速
4、追及问题的分析和解题思路
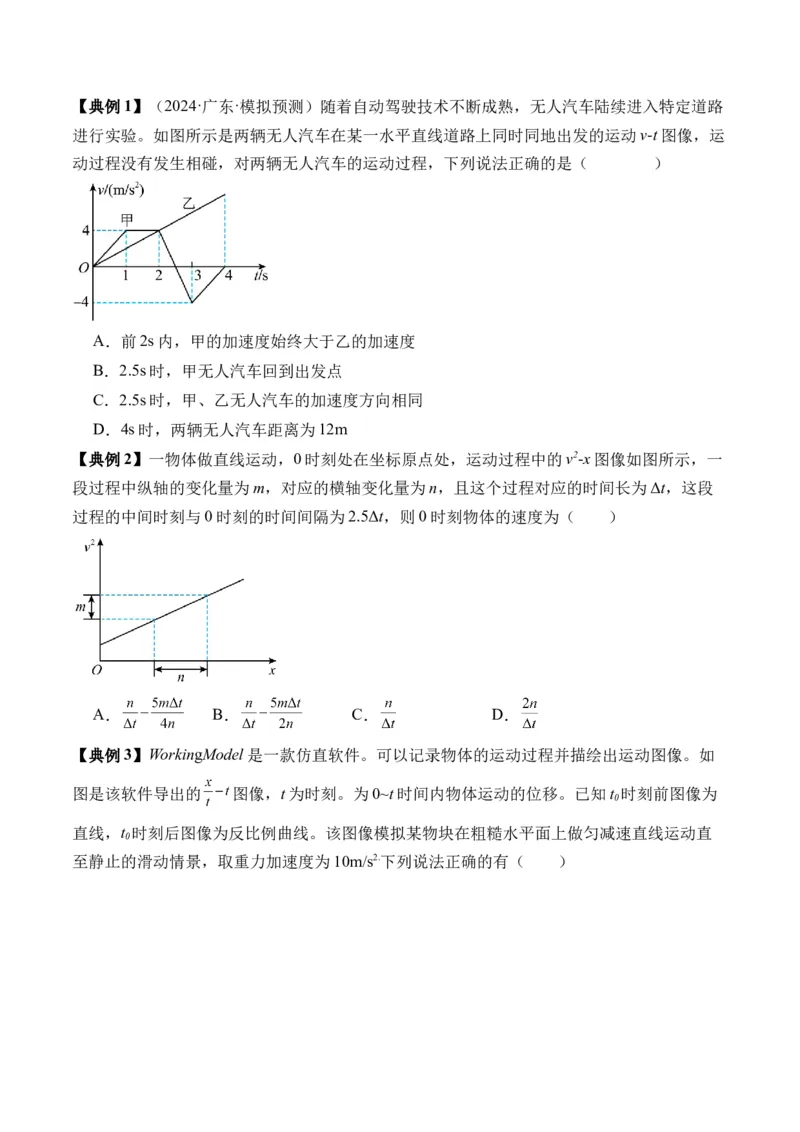
【题型一】运动图像问题【典例1】(2024·广东·模拟预测)随着自动驾驶技术不断成熟,无人汽车陆续进入特定道路
进行实验。如图所示是两辆无人汽车在某一水平直线道路上同时同地出发的运动v-t图像,运
动过程没有发生相碰,对两辆无人汽车的运动过程,下列说法正确的是( )
A.前2s内,甲的加速度始终大于乙的加速度
B.2.5s时,甲无人汽车回到出发点
C.2.5s时,甲、乙无人汽车的加速度方向相同
D.4s时,两辆无人汽车距离为12m
【典例2】一物体做直线运动,0时刻处在坐标原点处,运动过程中的v2-x图像如图所示,一
段过程中纵轴的变化量为m,对应的横轴变化量为n,且这个过程对应的时间长为Δt,这段
过程的中间时刻与0时刻的时间间隔为2.5Δt,则0时刻物体的速度为( )
A. B. C. D.
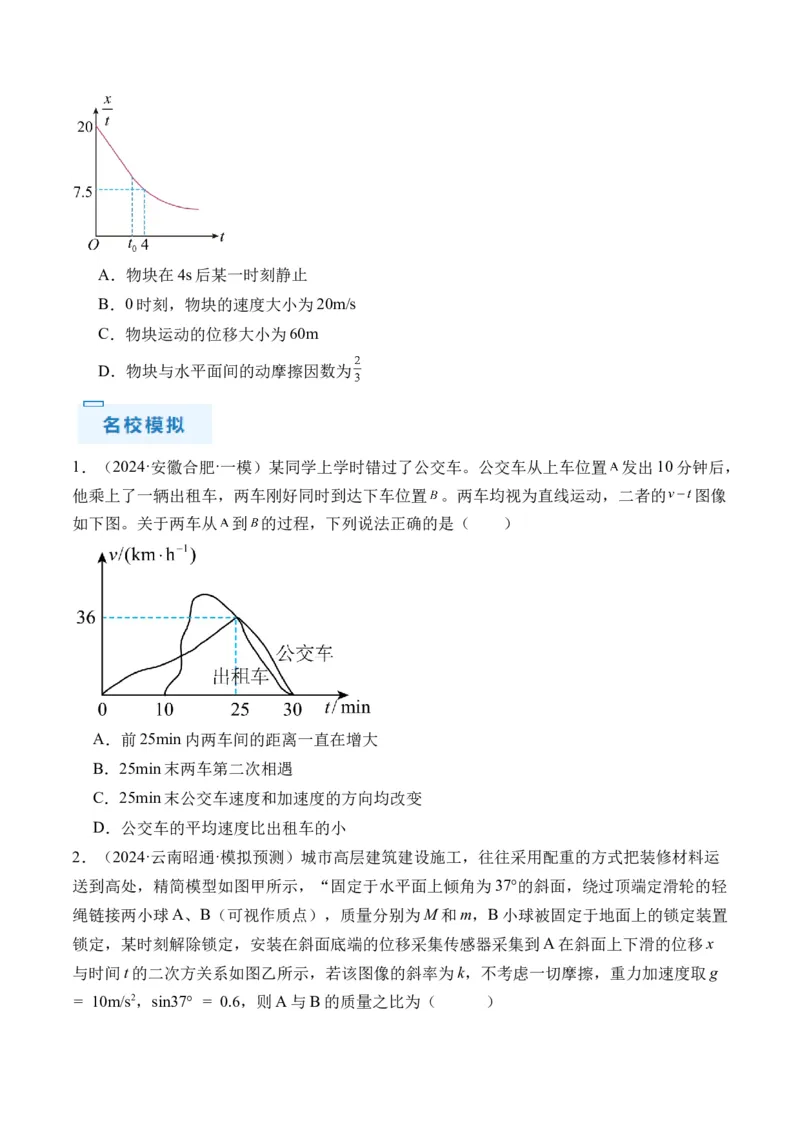
【典例3】WorkingModel是一款仿直软件。可以记录物体的运动过程并描绘出运动图像。如
图是该软件导出的 图像,t为时刻。为0~t时间内物体运动的位移。已知t 时刻前图像为
0
直线,t 时刻后图像为反比例曲线。该图像模拟某物块在粗糙水平面上做匀减速直线运动直
0
至静止的滑动情景,取重力加速度为10m/s2.下列说法正确的有( )A.物块在4s后某一时刻静止
B.0时刻,物块的速度大小为20m/s
C.物块运动的位移大小为60m
D.物块与水平面间的动摩擦因数为
1.(2024·安徽合肥·一模)某同学上学时错过了公交车。公交车从上车位置 发出10分钟后,
他乘上了一辆出租车,两车刚好同时到达下车位置 。两车均视为直线运动,二者的 图像
如下图。关于两车从 到 的过程,下列说法正确的是( )
A.前25min内两车间的距离一直在增大
B.25min末两车第二次相遇
C.25min末公交车速度和加速度的方向均改变
D.公交车的平均速度比出租车的小
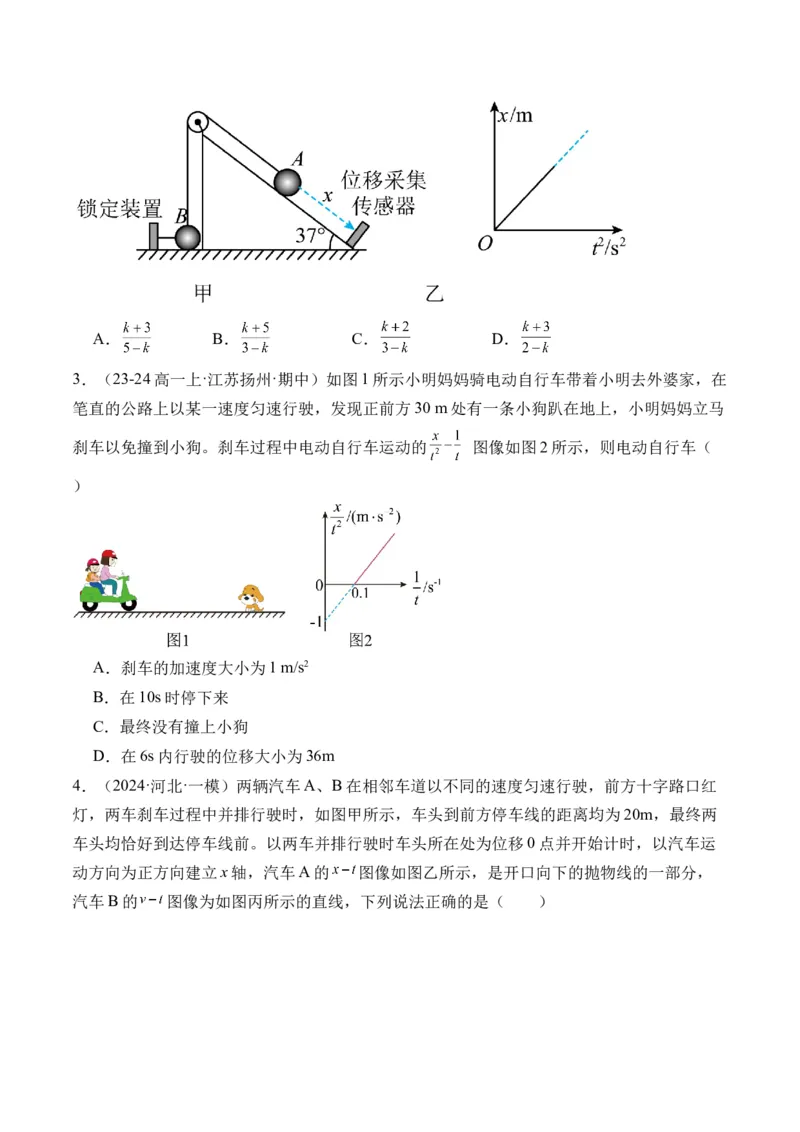
2.(2024·云南昭通·模拟预测)城市高层建筑建设施工,往往采用配重的方式把装修材料运
送到高处,精简模型如图甲所示,“固定于水平面上倾角为37°的斜面,绕过顶端定滑轮的轻
绳链接两小球A、B(可视作质点),质量分别为M和m,B小球被固定于地面上的锁定装置
锁定,某时刻解除锁定,安装在斜面底端的位移采集传感器采集到A在斜面上下滑的位移x
与时间t的二次方关系如图乙所示,若该图像的斜率为k,不考虑一切摩擦,重力加速度取g
= 10m/s2,sin37° = 0.6,则A与B的质量之比为( )A. B. C. D.
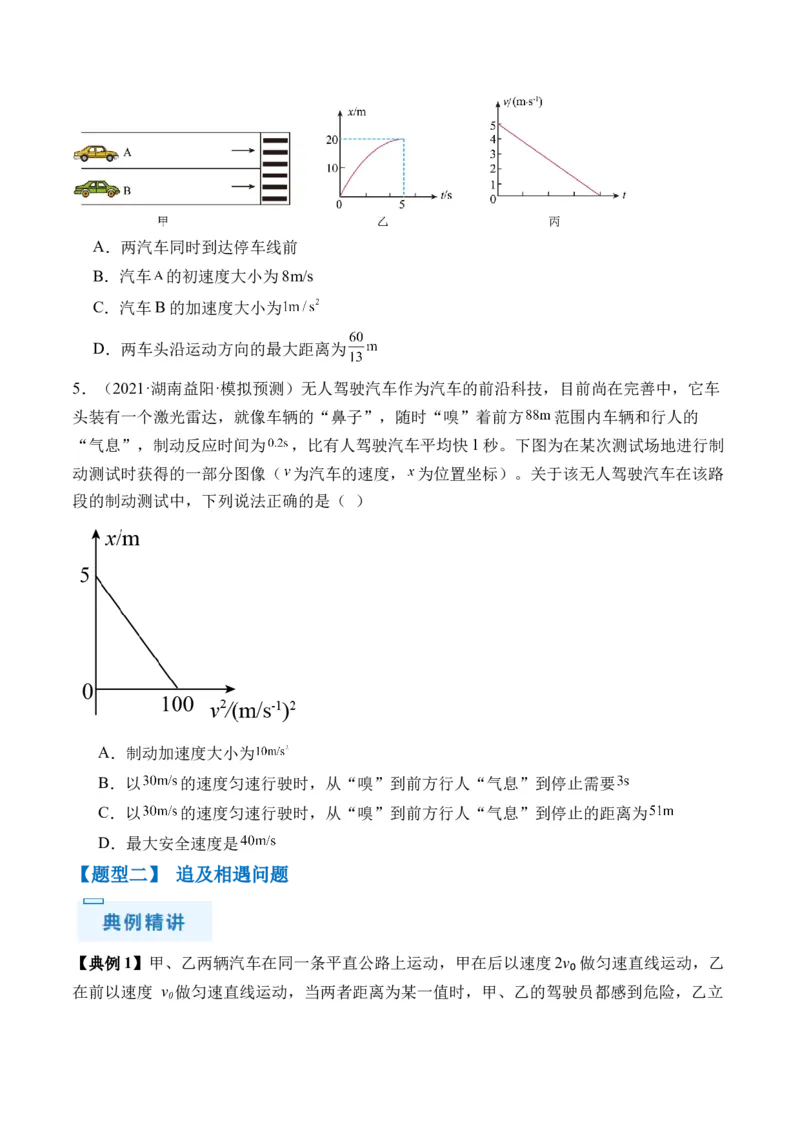
3.(23-24高一上·江苏扬州·期中)如图1所示小明妈妈骑电动自行车带着小明去外婆家,在
笔直的公路上以某一速度匀速行驶,发现正前方30 m处有一条小狗趴在地上,小明妈妈立马
刹车以免撞到小狗。刹车过程中电动自行车运动的 图像如图2所示,则电动自行车(
)
A.刹车的加速度大小为1 m/s2
B.在10s时停下来
C.最终没有撞上小狗
D.在6s内行驶的位移大小为36m
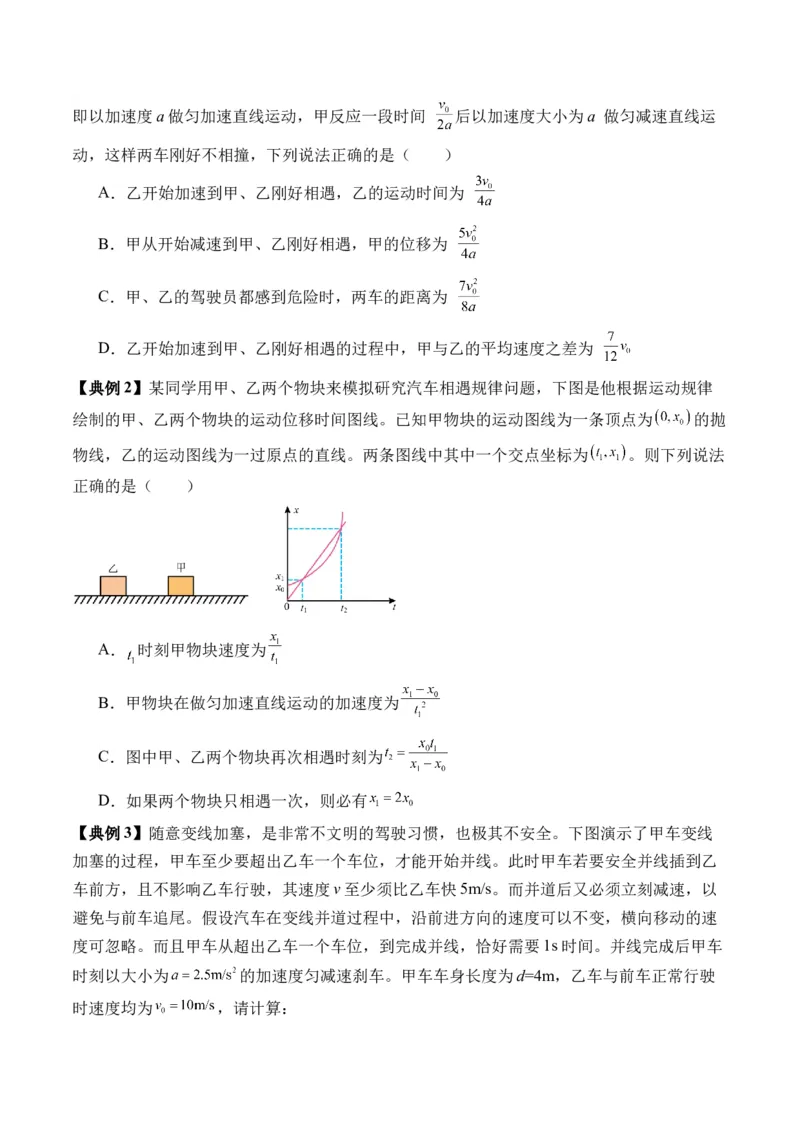
4.(2024·河北·一模)两辆汽车A、B在相邻车道以不同的速度匀速行驶,前方十字路口红
灯,两车刹车过程中并排行驶时,如图甲所示,车头到前方停车线的距离均为20m,最终两
车头均恰好到达停车线前。以两车并排行驶时车头所在处为位移0点并开始计时,以汽车运
动方向为正方向建立x轴,汽车A的 图像如图乙所示,是开口向下的抛物线的一部分,
汽车B的 图像为如图丙所示的直线,下列说法正确的是( )A.两汽车同时到达停车线前
B.汽车 的初速度大小为8m/s
C.汽车B的加速度大小为
D.两车头沿运动方向的最大距离为
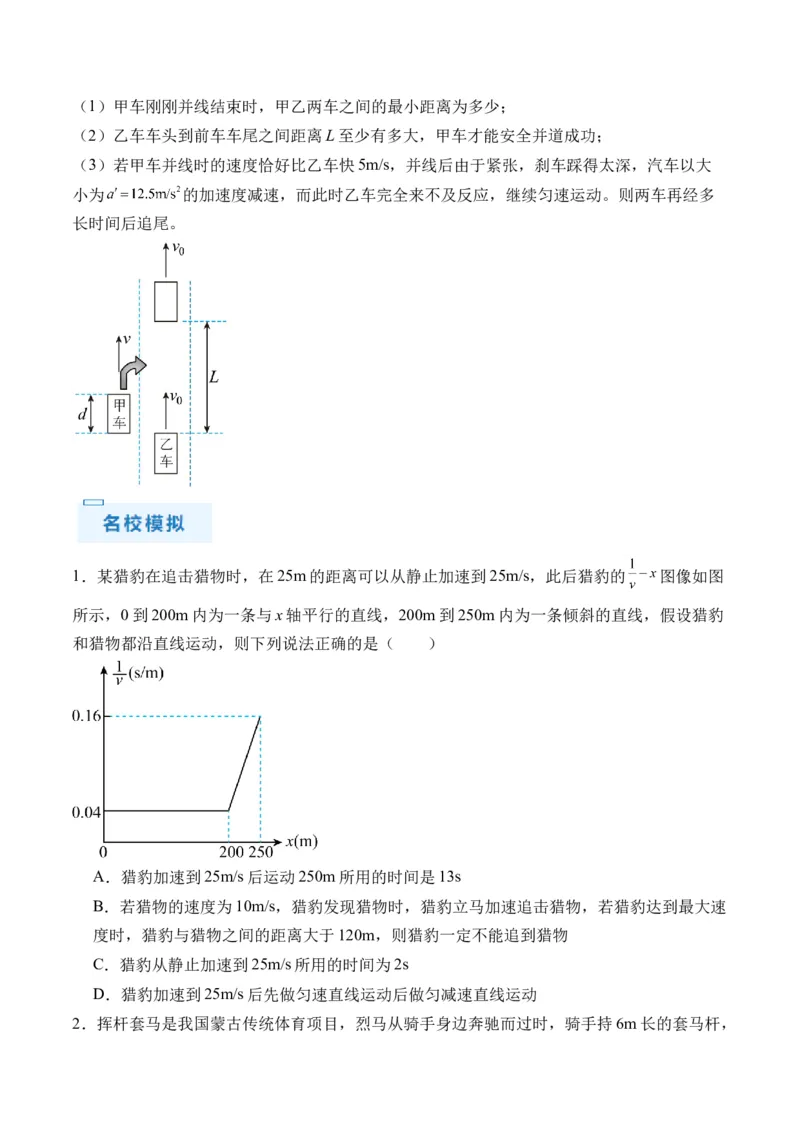
5.(2021·湖南益阳·模拟预测)无人驾驶汽车作为汽车的前沿科技,目前尚在完善中,它车
头装有一个激光雷达,就像车辆的“鼻子”,随时“嗅”着前方 范围内车辆和行人的
“气息”,制动反应时间为 ,比有人驾驶汽车平均快1秒。下图为在某次测试场地进行制
动测试时获得的一部分图像( 为汽车的速度, 为位置坐标)。关于该无人驾驶汽车在该路
段的制动测试中,下列说法正确的是( )
A.制动加速度大小为
B.以 的速度匀速行驶时,从“嗅”到前方行人“气息”到停止需要
C.以 的速度匀速行驶时,从“嗅”到前方行人“气息”到停止的距离为
D.最大安全速度是
【题型二】 追及相遇问题
【典例1】甲、乙两辆汽车在同一条平直公路上运动,甲在后以速度2v₀做匀速直线运动,乙
在前以速度 v 做匀速直线运动,当两者距离为某一值时,甲、乙的驾驶员都感到危险,乙立
0即以加速度a做匀加速直线运动,甲反应一段时间 后以加速度大小为a 做匀减速直线运
动,这样两车刚好不相撞,下列说法正确的是( )
A.乙开始加速到甲、乙刚好相遇,乙的运动时间为
B.甲从开始减速到甲、乙刚好相遇,甲的位移为
C.甲、乙的驾驶员都感到危险时,两车的距离为
D.乙开始加速到甲、乙刚好相遇的过程中,甲与乙的平均速度之差为
【典例2】某同学用甲、乙两个物块来模拟研究汽车相遇规律问题,下图是他根据运动规律
绘制的甲、乙两个物块的运动位移时间图线。已知甲物块的运动图线为一条顶点为 的抛
物线,乙的运动图线为一过原点的直线。两条图线中其中一个交点坐标为 。则下列说法
正确的是( )
A. 时刻甲物块速度为
B.甲物块在做匀加速直线运动的加速度为
C.图中甲、乙两个物块再次相遇时刻为
D.如果两个物块只相遇一次,则必有
【典例3】随意变线加塞,是非常不文明的驾驶习惯,也极其不安全。下图演示了甲车变线
加塞的过程,甲车至少要超出乙车一个车位,才能开始并线。此时甲车若要安全并线插到乙
车前方,且不影响乙车行驶,其速度v至少须比乙车快5m/s。而并道后又必须立刻减速,以
避免与前车追尾。假设汽车在变线并道过程中,沿前进方向的速度可以不变,横向移动的速
度可忽略。而且甲车从超出乙车一个车位,到完成并线,恰好需要1s时间。并线完成后甲车
时刻以大小为 的加速度匀减速刹车。甲车车身长度为d=4m,乙车与前车正常行驶
时速度均为 ,请计算:(1)甲车刚刚并线结束时,甲乙两车之间的最小距离为多少;
(2)乙车车头到前车车尾之间距离L至少有多大,甲车才能安全并道成功;
(3)若甲车并线时的速度恰好比乙车快5m/s,并线后由于紧张,刹车踩得太深,汽车以大
小为 的加速度减速,而此时乙车完全来不及反应,继续匀速运动。则两车再经多
长时间后追尾。
1.某猎豹在追击猎物时,在25m的距离可以从静止加速到25m/s,此后猎豹的 图像如图
所示,0到200m内为一条与x轴平行的直线,200m到250m内为一条倾斜的直线,假设猎豹
和猎物都沿直线运动,则下列说法正确的是( )
A.猎豹加速到25m/s后运动250m所用的时间是13s
B.若猎物的速度为10m/s,猎豹发现猎物时,猎豹立马加速追击猎物,若猎豹达到最大速
度时,猎豹与猎物之间的距离大于120m,则猎豹一定不能追到猎物
C.猎豹从静止加速到25m/s所用的时间为2s
D.猎豹加速到25m/s后先做匀速直线运动后做匀减速直线运动
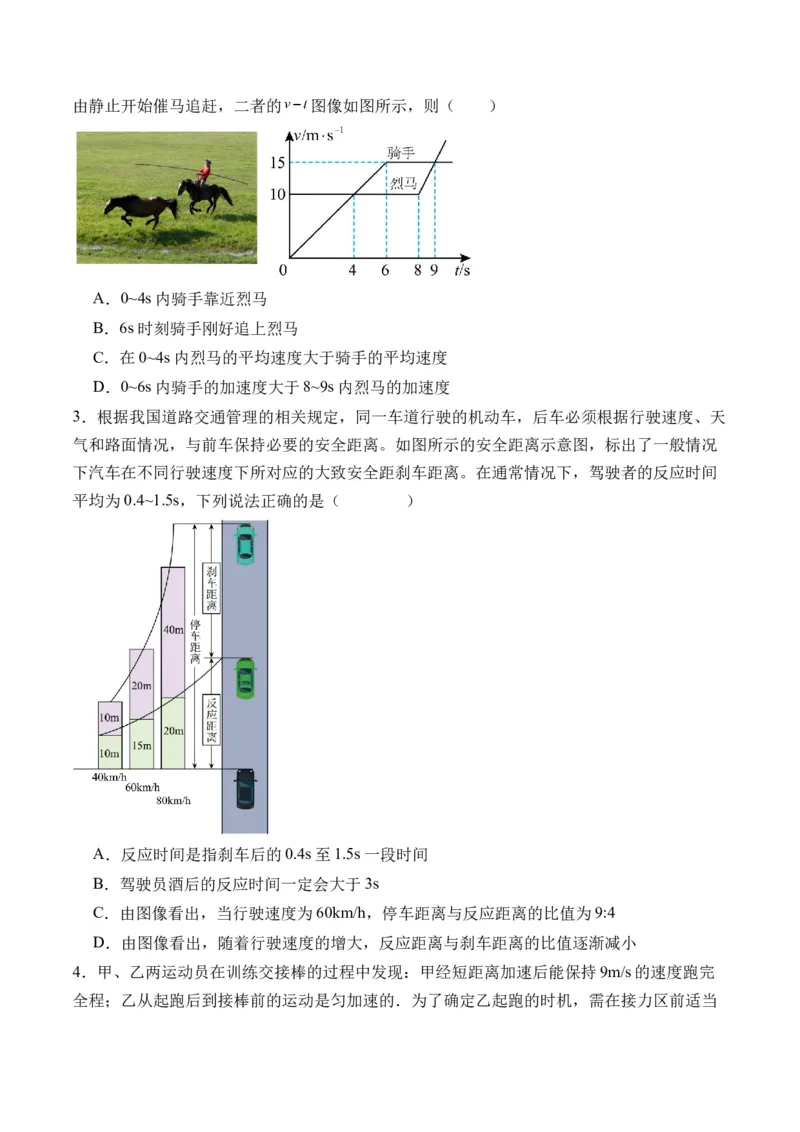
2.挥杆套马是我国蒙古传统体育项目,烈马从骑手身边奔驰而过时,骑手持6m长的套马杆,由静止开始催马追赶,二者的 图像如图所示,则( )
A.0~4s内骑手靠近烈马
B.6s时刻骑手刚好追上烈马
C.在0~4s内烈马的平均速度大于骑手的平均速度
D.0~6s内骑手的加速度大于8~9s内烈马的加速度
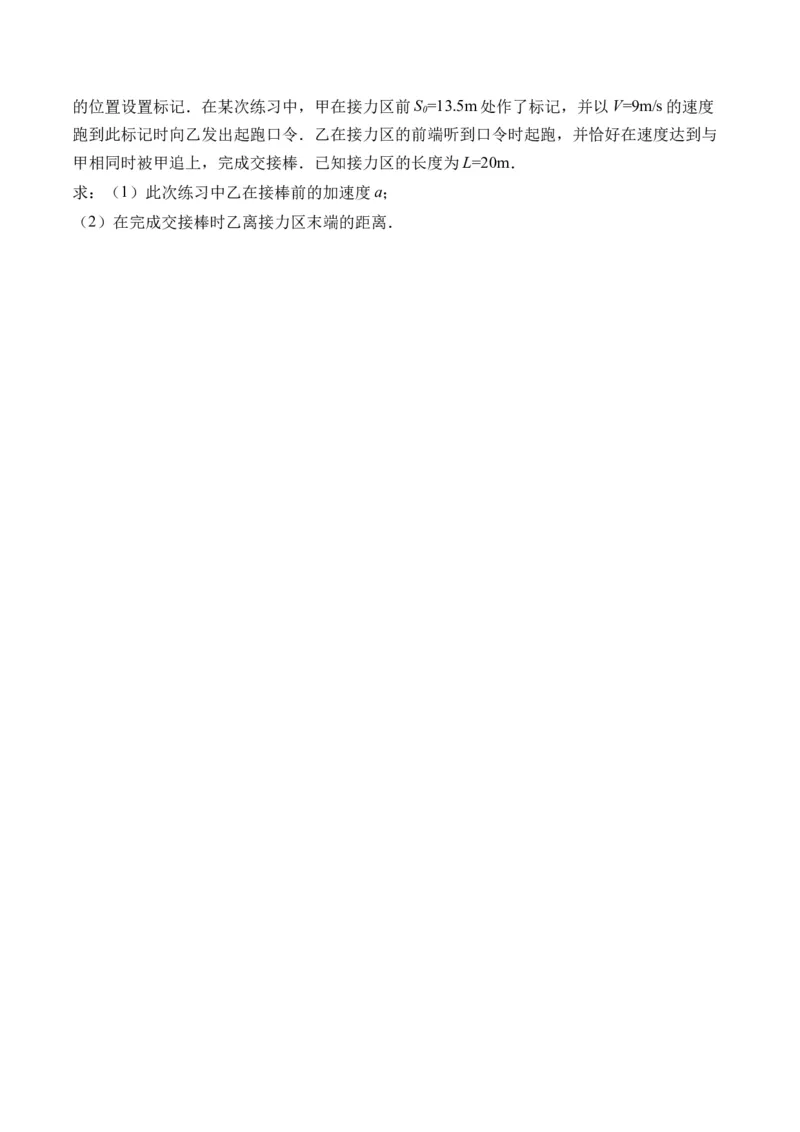
3.根据我国道路交通管理的相关规定,同一车道行驶的机动车,后车必须根据行驶速度、天
气和路面情况,与前车保持必要的安全距离。如图所示的安全距离示意图,标出了一般情况
下汽车在不同行驶速度下所对应的大致安全距刹车距离。在通常情况下,驾驶者的反应时间
平均为0.4~1.5s,下列说法正确的是( )
A.反应时间是指刹车后的0.4s至1.5s一段时间
B.驾驶员酒后的反应时间一定会大于3s
C.由图像看出,当行驶速度为60km/h,停车距离与反应距离的比值为9:4
D.由图像看出,随着行驶速度的增大,反应距离与刹车距离的比值逐渐减小
4.甲、乙两运动员在训练交接棒的过程中发现:甲经短距离加速后能保持9m/s的速度跑完
全程;乙从起跑后到接棒前的运动是匀加速的.为了确定乙起跑的时机,需在接力区前适当的位置设置标记.在某次练习中,甲在接力区前S =13.5m处作了标记,并以V=9m/s的速度
0
跑到此标记时向乙发出起跑口令.乙在接力区的前端听到口令时起跑,并恰好在速度达到与
甲相同时被甲追上,完成交接棒.已知接力区的长度为L=20m.
求:(1)此次练习中乙在接棒前的加速度a;
(2)在完成交接棒时乙离接力区末端的距离.

