文档内容
秘籍 07 动力学和能量观点的综合应用
一、功能关系的理解和应用
1.功的正负与能量增减的对应关系
(1)物体动能的增加与减少要看合外力对物体做正功还是做负功。
(2)势能的增加与减少要看对应的作用力(如重力、弹簧弹力、电场力等)做负功还是做正功。
(3)机械能的增加与减少要看重力和弹簧弹力之外的力对物体做正功还是做负功。
2.摩擦力做功的特点
(1)一对静摩擦力所做功的代数和总等于零。
(2)一对滑动摩擦力做功的代数和总是负值,差值为机械能转化为内能的部分,也就是系统机
械能的损失量。
(3)说明:无论是静摩擦力还是滑动摩擦力,都可以对物体做正功,也可以做负功,还可以不
做功。
二、能量守恒的理解和应用
1.对能量守恒定律的两点理解
(1)某种形式的能量减少,一定存在其他形式的能量增加,且减少量和增加量一定相等。
(2)某个物体的能量减少,一定存在其他物体的能量增加,且减少量和增加量一定相等。
2.运用能量守恒定律解题的基本思路
三、动力学和能量观点的三大综合应用
应用动力学和能量观点分析多过程问题
核心策略:
(1)动力学方法观点:牛顿运动定律、运动学基本规律.
(2)能量观点:动能定理、机械能守恒定律、能量守恒定律.应用动力学和能量观点分析传送带模型问题
核心功能关系
(1)功能关系分析:W =ΔE+ΔE+Q.
F k p
(2)对W 和Q的理解:
F
①传送带的功:W =Fx ;
F 传
②产生的内能Q=Fx
f 相对.
应用动力学和能量观点分析滑块—木板模型问题
核心思路:
滑块从木板的一端运动到另一端的过程中,若滑块和木板沿同一方向运动,则滑块的位移和
木板的位移之差等于木板的长度;若滑块和木板沿相反方向运动,则滑块的位移和木板的位
移之和等于木板的长度.
【题型】应用动力学和能量观点分析多过成问题
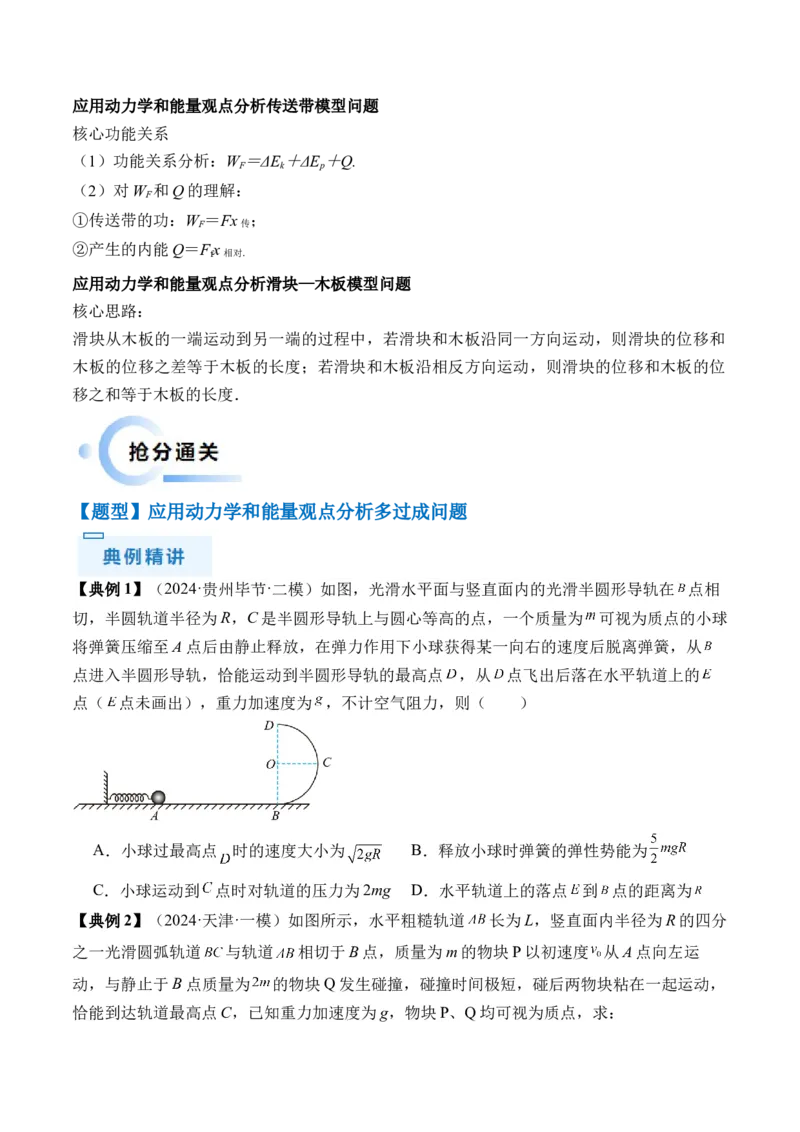
【典例1】(2024·贵州毕节·二模)如图,光滑水平面与竖直面内的光滑半圆形导轨在 点相
切,半圆轨道半径为R,C是半圆形导轨上与圆心等高的点,一个质量为 可视为质点的小球
将弹簧压缩至A点后由静止释放,在弹力作用下小球获得某一向右的速度后脱离弹簧,从
点进入半圆形导轨,恰能运动到半圆形导轨的最高点 ,从 点飞出后落在水平轨道上的
点( 点未画出),重力加速度为 ,不计空气阻力,则( )
A.小球过最高点 时的速度大小为 B.释放小球时弹簧的弹性势能为
C.小球运动到 点时对轨道的压力为2mg D.水平轨道上的落点 到 点的距离为
【典例2】(2024·天津·一模)如图所示,水平粗糙轨道 长为L,竖直面内半径为R的四分
之一光滑圆弧轨道 与轨道 相切于B点,质量为m的物块P以初速度 从A点向左运
动,与静止于B点质量为 的物块Q发生碰撞,碰撞时间极短,碰后两物块粘在一起运动,
恰能到达轨道最高点C,已知重力加速度为g,物块P、Q均可视为质点,求:(1)两物块碰后瞬间对轨道B点的压力 的大小;
(2)物块P与水平轨道 间的动摩擦因数 ;
(3)碰撞过程中物块P对物块Q做的功W的大小。
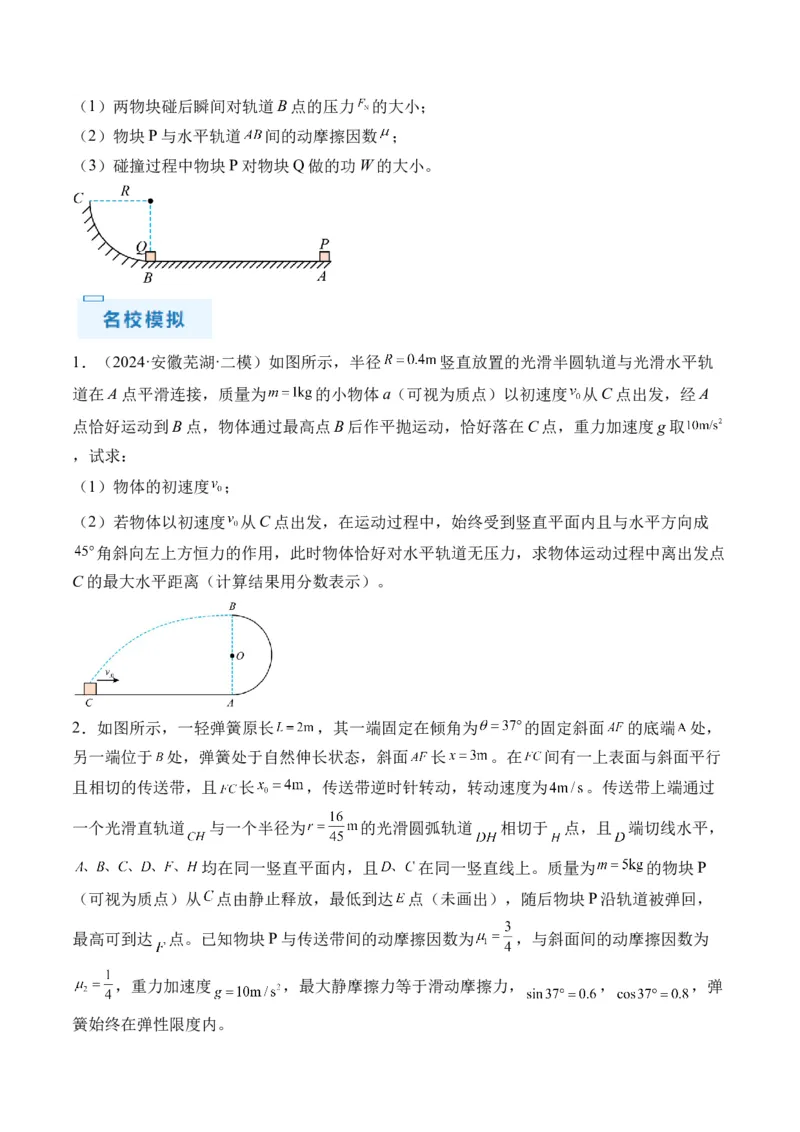
1.(2024·安徽芜湖·二模)如图所示,半径 竖直放置的光滑半圆轨道与光滑水平轨
道在A点平滑连接,质量为 的小物体a(可视为质点)以初速度 从C点出发,经A
点恰好运动到B点,物体通过最高点B后作平抛运动,恰好落在C点,重力加速度g取
,试求:
(1)物体的初速度 ;
(2)若物体以初速度 从C点出发,在运动过程中,始终受到竖直平面内且与水平方向成
角斜向左上方恒力的作用,此时物体恰好对水平轨道无压力,求物体运动过程中离出发点
C的最大水平距离(计算结果用分数表示)。
2.如图所示,一轻弹簧原长 ,其一端固定在倾角为 的固定斜面 的底端 处,
另一端位于 处,弹簧处于自然伸长状态,斜面 长 。在 间有一上表面与斜面平行
且相切的传送带,且 长 ,传送带逆时针转动,转动速度为 。传送带上端通过
一个光滑直轨道 与一个半径为 的光滑圆弧轨道 相切于 点,且 端切线水平,
均在同一竖直平面内,且 在同一竖直线上。质量为 的物块P
(可视为质点)从 点由静止释放,最低到达 点(未画出),随后物块P沿轨道被弹回,
最高可到达 点。已知物块P与传送带间的动摩擦因数为 ,与斜面间的动摩擦因数为
,重力加速度 ,最大静摩擦力等于滑动摩擦力, , ,弹
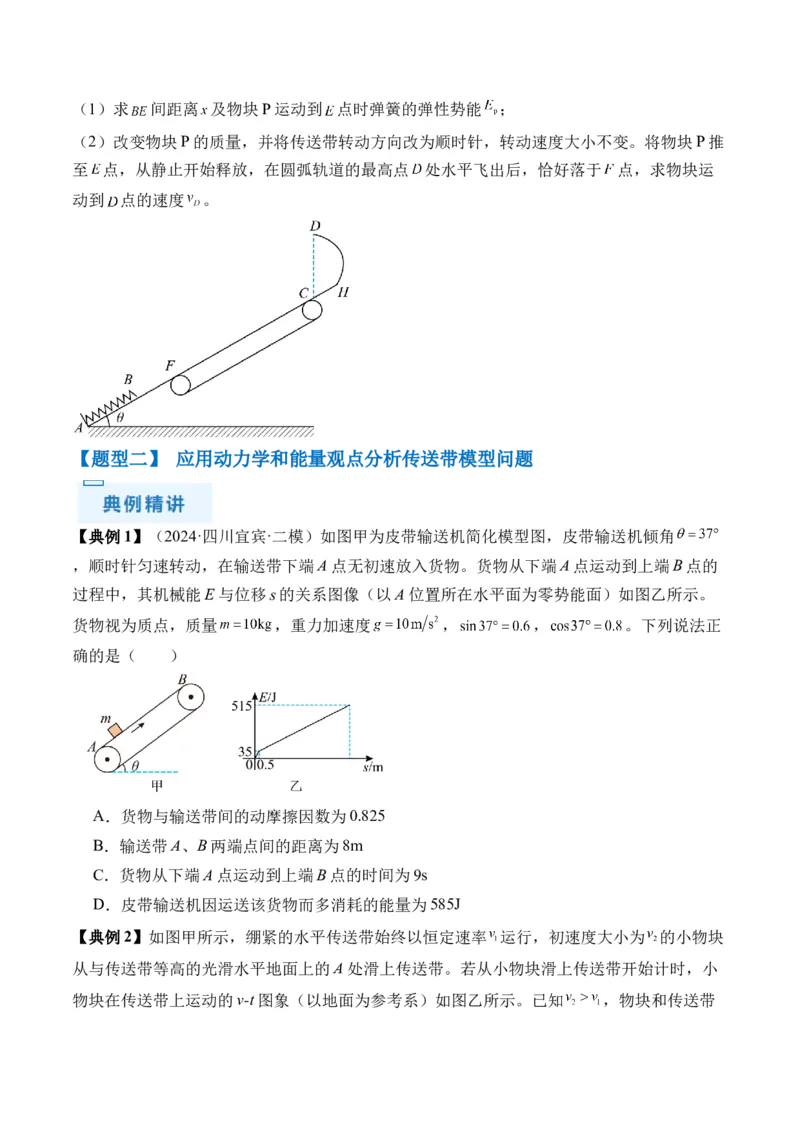
簧始终在弹性限度内。(1)求 间距离 及物块P运动到 点时弹簧的弹性势能 ;
(2)改变物块P的质量,并将传送带转动方向改为顺时针,转动速度大小不变。将物块P推
至 点,从静止开始释放,在圆弧轨道的最高点 处水平飞出后,恰好落于 点,求物块运
动到 点的速度 。
【题型二】 应用动力学和能量观点分析传送带模型问题
【典例1】(2024·四川宜宾·二模)如图甲为皮带输送机简化模型图,皮带输送机倾角
,顺时针匀速转动,在输送带下端A点无初速放入货物。货物从下端A点运动到上端B点的
过程中,其机械能E与位移s的关系图像(以A位置所在水平面为零势能面)如图乙所示。
货物视为质点,质量 ,重力加速度 , , 。下列说法正
确的是( )
A.货物与输送带间的动摩擦因数为0.825
B.输送带A、B两端点间的距离为8m
C.货物从下端A点运动到上端B点的时间为9s
D.皮带输送机因运送该货物而多消耗的能量为585J
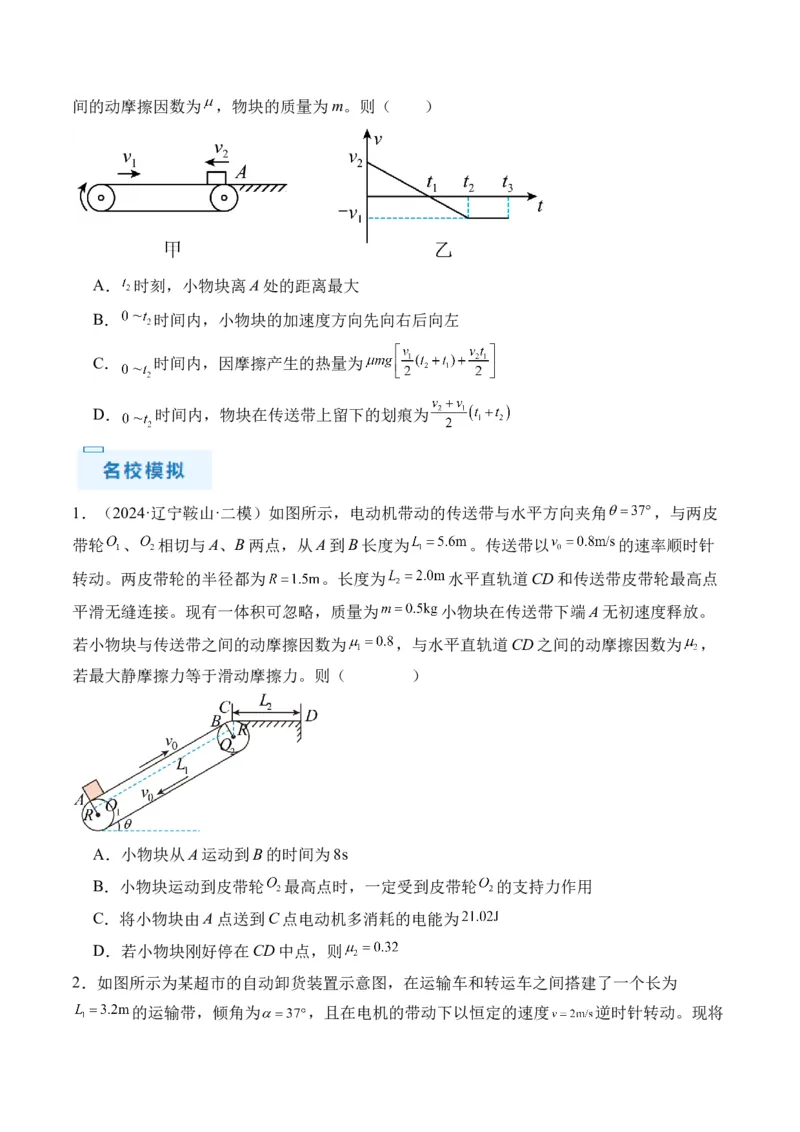
【典例2】如图甲所示,绷紧的水平传送带始终以恒定速率 运行,初速度大小为 的小物块
从与传送带等高的光滑水平地面上的A处滑上传送带。若从小物块滑上传送带开始计时,小
物块在传送带上运动的v-t图象(以地面为参考系)如图乙所示。已知 ,物块和传送带间的动摩擦因数为 ,物块的质量为m。则( )
A. 时刻,小物块离A处的距离最大
B. 时间内,小物块的加速度方向先向右后向左
C. 时间内,因摩擦产生的热量为
D. 时间内,物块在传送带上留下的划痕为
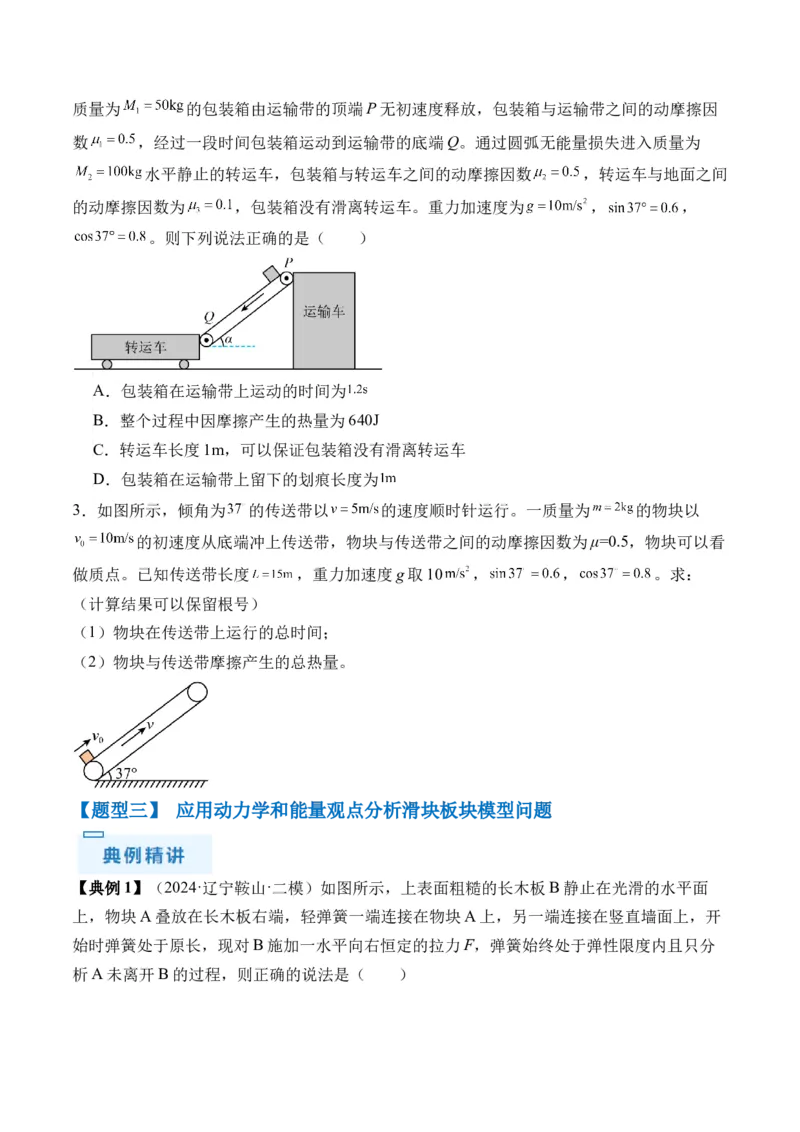
1.(2024·辽宁鞍山·二模)如图所示,电动机带动的传送带与水平方向夹角 ,与两皮
带轮 、 相切与A、B两点,从A到B长度为 。传送带以 的速率顺时针
转动。两皮带轮的半径都为 。长度为 水平直轨道CD和传送带皮带轮最高点
平滑无缝连接。现有一体积可忽略,质量为 小物块在传送带下端A无初速度释放。
若小物块与传送带之间的动摩擦因数为 ,与水平直轨道CD之间的动摩擦因数为 ,
若最大静摩擦力等于滑动摩擦力。则( )
A.小物块从A运动到B的时间为8s
B.小物块运动到皮带轮 最高点时,一定受到皮带轮 的支持力作用
C.将小物块由A点送到C点电动机多消耗的电能为
D.若小物块刚好停在CD中点,则
2.如图所示为某超市的自动卸货装置示意图,在运输车和转运车之间搭建了一个长为
的运输带,倾角为 ,且在电机的带动下以恒定的速度 逆时针转动。现将质量为 的包装箱由运输带的顶端P无初速度释放,包装箱与运输带之间的动摩擦因
数 ,经过一段时间包装箱运动到运输带的底端Q。通过圆弧无能量损失进入质量为
水平静止的转运车,包装箱与转运车之间的动摩擦因数 ,转运车与地面之间
的动摩擦因数为 ,包装箱没有滑离转运车。重力加速度为 , ,
。则下列说法正确的是( )
A.包装箱在运输带上运动的时间为
B.整个过程中因摩擦产生的热量为640J
C.转运车长度1m,可以保证包装箱没有滑离转运车
D.包装箱在运输带上留下的划痕长度为
3.如图所示,倾角为 的传送带以 的速度顺时针运行。一质量为 的物块以
的初速度从底端冲上传送带,物块与传送带之间的动摩擦因数为μ=0.5,物块可以看
做质点。已知传送带长度 ,重力加速度g取10 , , 。求:
(计算结果可以保留根号)
(1)物块在传送带上运行的总时间;
(2)物块与传送带摩擦产生的总热量。
【题型三】 应用动力学和能量观点分析滑块板块模型问题
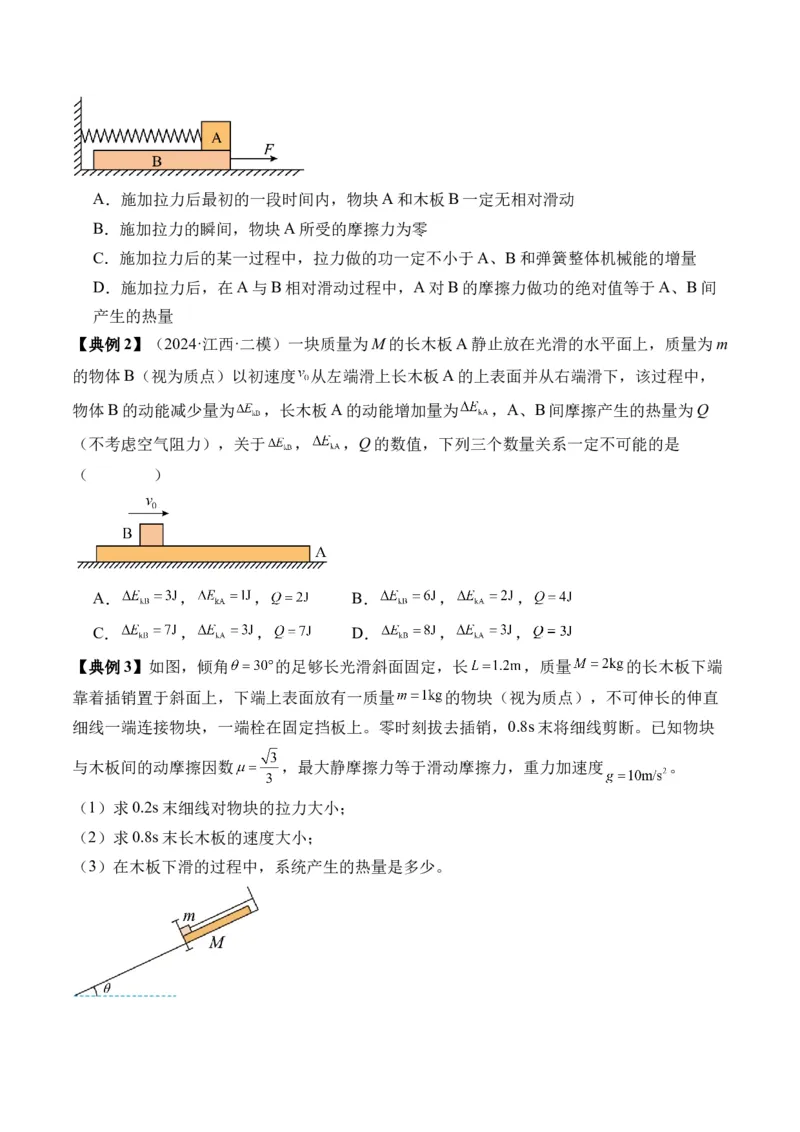
【典例1】(2024·辽宁鞍山·二模)如图所示,上表面粗糙的长木板B静止在光滑的水平面
上,物块A叠放在长木板右端,轻弹簧一端连接在物块A上,另一端连接在竖直墙面上,开
始时弹簧处于原长,现对B施加一水平向右恒定的拉力F,弹簧始终处于弹性限度内且只分
析A未离开B的过程,则正确的说法是( )A.施加拉力后最初的一段时间内,物块A和木板B一定无相对滑动
B.施加拉力的瞬间,物块A所受的摩擦力为零
C.施加拉力后的某一过程中,拉力做的功一定不小于A、B和弹簧整体机械能的增量
D.施加拉力后,在A与B相对滑动过程中,A对B的摩擦力做功的绝对值等于A、B间
产生的热量
【典例2】(2024·江西·二模)一块质量为M的长木板A静止放在光滑的水平面上,质量为m
的物体B(视为质点)以初速度 从左端滑上长木板A的上表面并从右端滑下,该过程中,
物体B的动能减少量为 ,长木板A的动能增加量为 ,A、B间摩擦产生的热量为Q
(不考虑空气阻力),关于 , ,Q的数值,下列三个数量关系一定不可能的是
( )
A. , , B. , ,
C. , , D. , ,
【典例3】如图,倾角 的足够长光滑斜面固定,长 ,质量 的长木板下端
靠着插销置于斜面上,下端上表面放有一质量 的物块(视为质点),不可伸长的伸直
细线一端连接物块,一端栓在固定挡板上。零时刻拔去插销,0.8s末将细线剪断。已知物块
与木板间的动摩擦因数 ,最大静摩擦力等于滑动摩擦力,重力加速度 。
(1)求0.2s末细线对物块的拉力大小;
(2)求0.8s末长木板的速度大小;
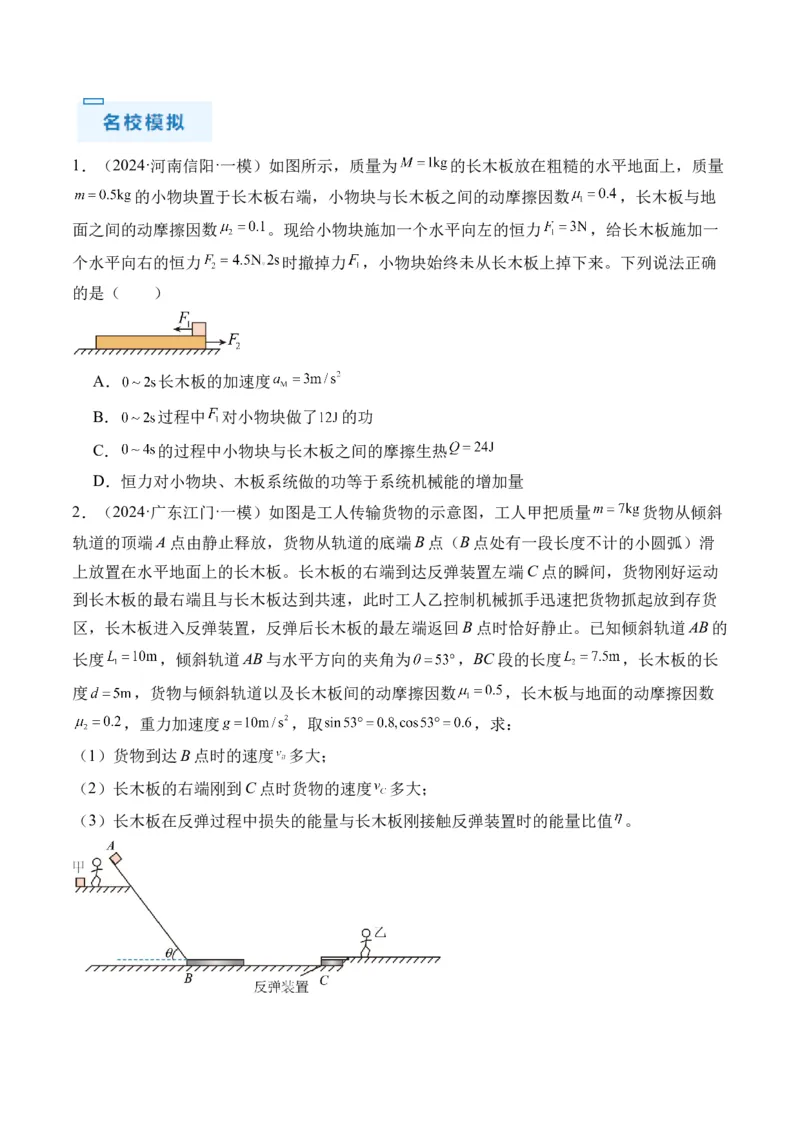
(3)在木板下滑的过程中,系统产生的热量是多少。1.(2024·河南信阳·一模)如图所示,质量为 的长木板放在粗糙的水平地面上,质量
的小物块置于长木板右端,小物块与长木板之间的动摩擦因数 ,长木板与地
面之间的动摩擦因数 。现给小物块施加一个水平向左的恒力 ,给长木板施加一
个水平向右的恒力 时撤掉力 ,小物块始终未从长木板上掉下来。下列说法正确
的是( )
A. 长木板的加速度
B. 过程中 对小物块做了 的功
C. 的过程中小物块与长木板之间的摩擦生热
D.恒力对小物块、木板系统做的功等于系统机械能的增加量
2.(2024·广东江门·一模)如图是工人传输货物的示意图,工人甲把质量 货物从倾斜
轨道的顶端A点由静止释放,货物从轨道的底端B点(B点处有一段长度不计的小圆弧)滑
上放置在水平地面上的长木板。长木板的右端到达反弹装置左端C点的瞬间,货物刚好运动
到长木板的最右端且与长木板达到共速,此时工人乙控制机械抓手迅速把货物抓起放到存货
区,长木板进入反弹装置,反弹后长木板的最左端返回B点时恰好静止。已知倾斜轨道AB的
长度 ,倾斜轨道AB与水平方向的夹角为 ,BC段的长度 ,长木板的长
度 ,货物与倾斜轨道以及长木板间的动摩擦因数 ,长木板与地面的动摩擦因数
,重力加速度 ,取 ,求:
(1)货物到达B点时的速度 多大;
(2)长木板的右端刚到C点时货物的速度 多大;
(3)长木板在反弹过程中损失的能量与长木板刚接触反弹装置时的能量比值 。

