文档内容
高一物理参考答案
选择题:共 小题,共 分。 在每小题给出的四个选项中,第 题只有一个选项符合题目要
10 42 1~8
求,每小题 分,共 分;第 题有多个选项符合题目要求,每小题 分,共 分。 全部选对的得
4 32 9~10 5 10 5
分,选对但不全的得 分,有选错的得 分。
3 0
题号
1 2 3 4 5 6 7 8 9 10
答案
B D B A D B C B ABD AC
解析 年 月 日 时 分 是一个特定的瞬间 在时间轴上对应的是一个点 指的是
1.B 【 】“2024 12 17 2 50 ” , ,
时刻 而不是时间间隔 错误 研究卫星进入预定轨道后的运动轨迹时 卫星的大小和形状相对
, ,A ; ,
于其运动轨迹来说可以忽略不计 不会影响对其运动轨迹的研究 因此可将卫星看作质点 正
, , ,B
确 卫星从发射到进入预定轨道的过程中 其运动轨迹不是直线 位移大小是从发射点到预定轨
; , ,
道位置的有向线段的长度 而路程是其运动轨迹的长度 二者不相等 错误 卫星直线加速升空
, , ,C ;
的过程中 加速度方向竖直向上 不可能处于失重状态 错误
, , ,D 。
600 350
解析 磁悬浮列车加速度为 3.6 2 2 高性能赛车加速度为 3.6 2
2.D 【 】 a1= m/s ≈0.28m/s , a2= m/s ≈12.
10×60 8
2 高性能赛车加速度大 所以速度大不一定加速度大 错误 速度变化量大 不一定加速度
15m/s , , ,A ; ,
大 错误 速度变化率就是加速度 所以磁悬浮列车变化率小 错误 速度变化率小意味着速度
,B ; , ,C ;
变化相对较缓 正确
,D 。
解析 国际单位制中的基本单位是经过科学选定的 不能随意选定 它们是构成其他单位的基
3.B 【 】 , ,
Δv
础 错误 加速度的单位 2 是根据加速度的定义式 a 由长度单位 和时间单位 推导
,A ; m/s =Δt, m s
出来的 所以加速度的单位是导出单位 正确 牛顿 是国际单位制中的导出单位 错误 国际
, ,B ; N ,C ;
单位制中力学的三个基本物理量是长度 质量和时间 错误
、 ,D 。
解析 铁球 和铁球 都做自由落体运动 下落的加速度均为重力加速度g 与铁球的质量无关
4.A 【 】 1 2 , , 。
根据自由落体运动的位移公式h 1gt2 它们下落的高度相同 所以下落时间相同 物体落水后声
= , , ,
2
音传播时间也相等 所以t t 正确 错误 井口到水面的高度h 1gt2 但是由于声音传播时
, 1= 2,A ,B ; = ,
2
间未知 所以不能确定井口到水面具体数值 错误 错误
, ,C ,D 。
解析 整个过程分为两个阶段 第一阶段 从 楼到 楼 电梯先加速下降 然后可能先匀速再减
5.D 【 】 : : 5 1 , ,
速或者减速到达 楼 第二阶段 从 楼到 楼 电梯先加速上升 然后可能先匀速再减速上升或
1 。 : 1 3 , ,
者减速上升到达 楼 v t图像面积表示位移 选项正负半轴面积大小相等 而整个过程位移不
3 。 - ,A ,
为 错误 选项v t图像只有正半轴 没有负半轴 表示电梯只有竖直向下运动阶段 没有竖
0,A ;B - , , ,
直向上运动阶段 错误 选项表示电梯先匀速直线运动 再静止不动 再反向匀速运动 没有加
,B ;C , , ,
速 减速阶段 错误 选项表示电梯先加速下降 再减速到 在 楼静止一段时间 然后竖直向
、 ,C ;D , 0, 1 ,
上加速运动 再减速运动到 楼 正确
, 3 ,D 。
解析 物体在B点速度为
v2A+ v2c
错误 设 AB 段和 BC 段位移均为 x 物体通过 AB 段时间为
6.B 【 】 ,A ; ,
2
x x t v
AB
t 物体通过BC段时间为t 所以物体通过AB段和BC段所用时间之比为 2 正
AB=v , BC=v , t =v ,B
BC
1 2 1
高一物理参考答案 第 1页(共4页)
{#{QQABZYYEogiIQABAARhCEQXCCgEQkACACSgOAAAUIAAAyQNABAA=}#}x v v
确 物体在AC段的平均速度为v 2 2 1 2 错误 因为物体做匀加速直线运动 所以 v 一
; =t t =v v ,C ; , 1
AB+ BC 1+ 2
定小于v 错误
2,D 。
解析 由于轻绳OA处于竖直方向 轻绳 OA 弹力与小球 A 重力等大反向 始终不变
7.C 【 】 , , ,A
错误 轻绳AB弹力为 也是始终不变 错误 对小球B受力分析 如图所示 可知F先
; 0, ,B ; , ,
减小再增大 轻绳OB弹力一直减小 最终减小到 正确 错误
, , 0,C ,D 。
解析 OA为轻质活杆 杆的弹力沿杆方向 所以β一定等于θ 错误 对小球 A 有 β
8.B 【 】 , , ,A ; tan
ma mg mg
解得a g β 正确 对小球A有 β 解得F 错误 对系统 由牛顿第二定
=mg, = tan ,B ; cos =F , N= β,C ; ,
N cos
律得F (M m)a (M m)g θ 错误
= +3 = +3 tan ,D 。
解析 当汽车运动到限速标志位置恰好为 时加速度最小 根据 v2
9.ABD 【 】72km/h=20m/s, 20m/s , -
( ) 2 解得v 正确 汽车减速的时间最多为 t 100m 正
30m/s =-2×4×100m, =10m/s,A ; = ≈6.7s,B
30m/s
2
确 若汽车以更大的加速度匀减速到限速标志位置 速度可以比 小 平均速度可以小于v
; , 20m/s ,
30m/s+20m/s 错误 正确
= =25m/s,C ,D 。
2
解析 对小球 A B 弹簧整体进行受力分析 如图所示 竖直方向有
10.AC 【 】 、 、 , 。
F mg 水平方向有 F F 解得 F mg F mg
CAsin60°=2 3 , CAcos60°= BD, CA=4 , BD=2 ,A
正确 错误 剪断轻绳CA瞬间 由于弹簧弹力瞬间不变 所以小球 A 受到的
,B ; , ,
F
CA
合外力大小为F mg 根据牛顿第二定律得 F ma 解得 a
CA=4 , CA= 3 A, A= m =
3
4 3g 正确 小球B受力不变 加速度为 错误
,C ; , 0,D 。
3
分 每空 分
11.(6 , 2 )
答案 均可 变大
【 】(1)12.00(11.98-12.02 ) (4)49 (5)
解析 由图乙可知 刻度尺的分度值为 需要估读到 弹簧自然下垂时的长度读数为
【 】(1) , 1mm, 0.1mm,
L
0=12.00cm。
根据胡克定律F kx 在本实验中 弹簧的弹力等于F nmg 弹簧的伸长量 x L L 所以 nmg
(4) = , , = , = - 0。 =
mg mg ( )
k(L L ) 整理得L n L 图像斜率为 20.00-14.00 ×0.01 解得 k 保留两位有
- 0 , = k + 0, k = m, =49N/m(
4-1
效数字
)。
减去一部分弹簧后 施加同样的力 弹簧伸长量会减小 故劲度系数会变大
(5) , , , 。
分
12.(10 )
答案 分 分
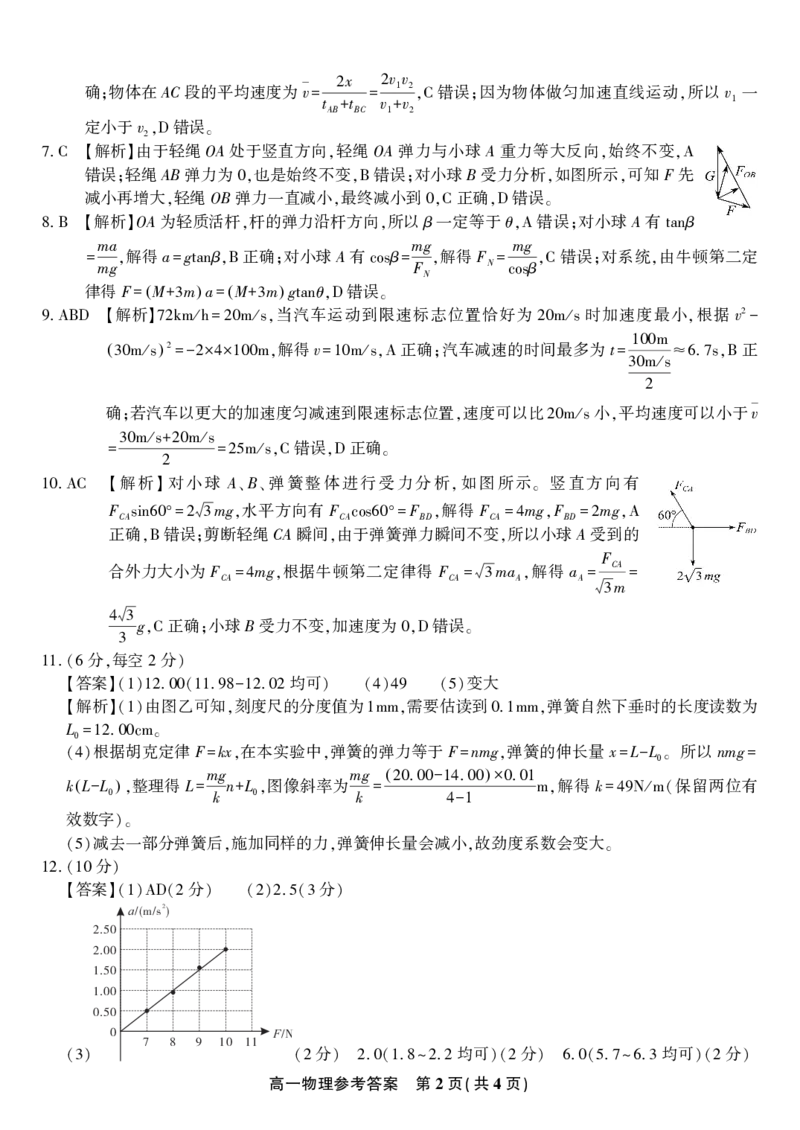
【 】(1)AD(2 ) (2)2.5(3 )
a/(m/s2)
2.50
2.00
1.50
1.00
0.50
0 F/N
7 8 9 10 11
分 均可 分 均可 分
(3) (2 ) 2.0(1.8~2.2 )(2 ) 6.0(5.7~6.3 )(2 )
高一物理参考答案 第 2页(共4页)
{#{QQABZYYEogiIQABAARhCEQXCCgEQkACACSgOAAAUIAAAyQNABAA=}#}解析 调节长木板一端滑轮的高度 使牵引小车的细绳与长木板保持平行 这样才能保证小车
【 】(1) , ,
所受拉力方向与运动方向一致 正确 平衡摩擦力时不应挂砝码和砝码盘 应让小车自身拖着纸带
,A ; ,
在长木板上做匀速运动来平衡摩擦力 错误 实验时应先接通打点计时器的电源 待打点稳定后再
,B ; ,
放开小车 错误 在本实验中 当用砝码和砝码盘的重力近似替代小车所受拉力时 需要满足砝码
,C ; , ,
盘和砝码的总质量m远小于小车的质量M 正确
,D 。
每 个点取一个计数点 电源频率为 所以时间间隔 T 使用逐差法计算加速度 a
(2) 5 , 50Hz, =0.1s, : =
OD OB OB
( - )- 0.10m 2
T2 = 2 =2.5m/s 。
2 2×(0.1s)
F f
根据牛顿第二定律F f Ma 变形可得a - 则a F图像的斜率为 k 1 由表中数据可知 k
(3) - = , = M , - =M, =
. .
2 00-0 50 -1 1 -1 则M 将F a 2 M 代入F f Ma 解得f
kg = kg , =2.0kg, =10N, =2.00m/s , =2kg - = , =6.0N。
10-7 2
分
13.(10 )
答案 方向沿斜面向下
【 】(1)30N; ;(2)62N
解析 将木块A和木块B作为整体 沿斜面方向 由受力平衡得f (M m)g θ 分
【 】(1) , , = + sin …… (1 )
带入数据解得f 分
=30N …………………………………………………………………………… (1 )
由牛顿第三定律 木块B对斜面的摩擦力大小为f′ f 方向沿斜面向下 分
, = =30N, ……………… (2 )
将木块A和木块B作为整体 垂直斜面方向 斜面与组合体之间的弹力为
(2) , ,
F (M m)g 分
N= + cos37° ……………………………………………………………………………… (1 )
木块B刚好要向上滑动时 木块B与斜面之间达到了最大静摩擦力 有f μF 分
, , max= N ………… (2 )
由受力平衡得F (M m)g θ f 分
= + sin + max …………………………………………………………… (2 )
联立解得F 分
=62N ………………………………………………………………………………… (1 )
分
14.(14 )
答案 能
【 】(1)4.6s;(2) ;4.8s
解析 设机器人A加速行驶t 时间后机器人B能控制
【 】(1) 1 。
此时机器人A的位移大小为x 1a t2 分
1= 1 1 ①…………………………………………………… (1 )
2
机器人B的位移大小为x v t 分
2= 2 1 ②…………………………………………………………… (1 )
两者位移关系为L m x x 分
-10 = 1+ 2 ③ …………………………………………………………… (2 )
联立 解得t . 负值舍去 分
①②③ 1≈4 6s( ) ………………………………………………………… (1 )
机器人A加速到最大速度v
(2) max=8m/s
v
max
所需时间为t 分
2= a =4s ………………………………………………………………………… (1 )
1
此过程中机器人A的位移为x 1a t2 m 分
3= 1 2=16 ………………………………………………… (1 )
2
之后机器人A做匀减速直线运动 设减速到停止所需时间为t
, 3
根据速度公式 v a t 分
0= max+ 2 3 ……………………………………………………………………… (1 )
可得t 分
3=8s ……………………………………………………………………………………… (1 )
假设机器人A匀减速时间为t 时机器人B能成功控制机器人 A 从机器人 A 开始运动到机器人 B
4 ,
能成功机器人A
,
机器人A的位移大小为x
4=
x
3+
v
max
t
4+
1a
2
t2
4 …………………………………… (1
分
)
2
机器人B的位移大小为x v (t t ) 分
5= 2 2+ 4 ………………………………………………………… (1 )
高一物理参考答案 第 3页(共4页)
{#{QQABZYYEogiIQABAARhCEQXCCgEQkACACSgOAAAUIAAAyQNABAA=}#}两者位移关系为L x x 分
-10m= 4+ 5 ………………………………………………………………… (1 )
解得t . t t′ . t 舍去 分
4≈0 8s< 3, 4≈23 2s> 3( ) ………………………………………………………… (1 )
所以机器人B能在小车运动过程中成功机器人A 经过的时间为t t t . 分
, 总= 2+ 4≈4 8s ………… (1 )
分
15.(18 )
答案
【 】(1)4m/s;(2)0.8s;(3)1.6m;3.2m
解析 小滑块在传送带上加速运动 根据牛顿第二定律得μ mg ma 分
【 】(1) , 1 = 1 ………………… (1 )
解得a 2 分
1=2m/s ………………………………………………………………………………… (1 )
若小滑块可以在传送带加速到与传送带共速 根据v2 v2 a x 分
, 0- 1=2 1 1 …………………………… (1 )
解得x L 所以小滑块在传送带上运动的最大速度为v 分
1=3m< , 0=4m/s ……………………… (1 )
小滑块滑上长木板后 对小滑块 由牛顿第二定律得μ mg ma 分
(2) , , 2 = 2 ……………………… (1 )
解得a 2 分
2=3m/s ………………………………………………………………………………… (1 )
对木板 由牛顿第二定律得μ mg μ mg ma 分
, 2 -2 3 = 3 ……………………………………………… (1 )
解得a 2 分
3=2m/s ………………………………………………………………………………… (1 )
设经过时间t 小滑块与木板共速 由运动学公式得v a t a t 分
1, , 0- 2 1= 3 1 ………………………… (1 )
解得t . 分
1=0 8s …………………………………………………………………………………… (1 )
根据v a t 分
(3) 共= 3 1 ………………………………………………………………………………… (1 )
解得v . 分
共=1 6m/s ………………………………………………………………………………… (1 )
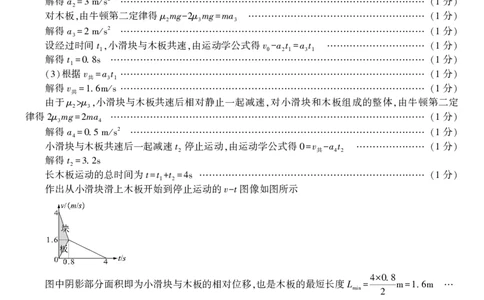
由于μ μ 小滑块与木板共速后相对静止一起减速 对小滑块和木板组成的整体 由牛顿第二定
2> 3, , ,
律得 μ mg ma 分
2 3 =2 4 …………………………………………………………………………………… (1 )
解得a . 2 分
4=0 5m/s ……………………………………………………………………………… (1 )
小滑块与木板共速后一起减速t 停止运动 由运动学公式得 v a t 分
2 , 0= 共- 4 2 ………………… (1 )
解得t .
2=3 2s
长木板运动的总时间为t t t 分
= 1+ 2=4s …………………………………………………………… (1 )
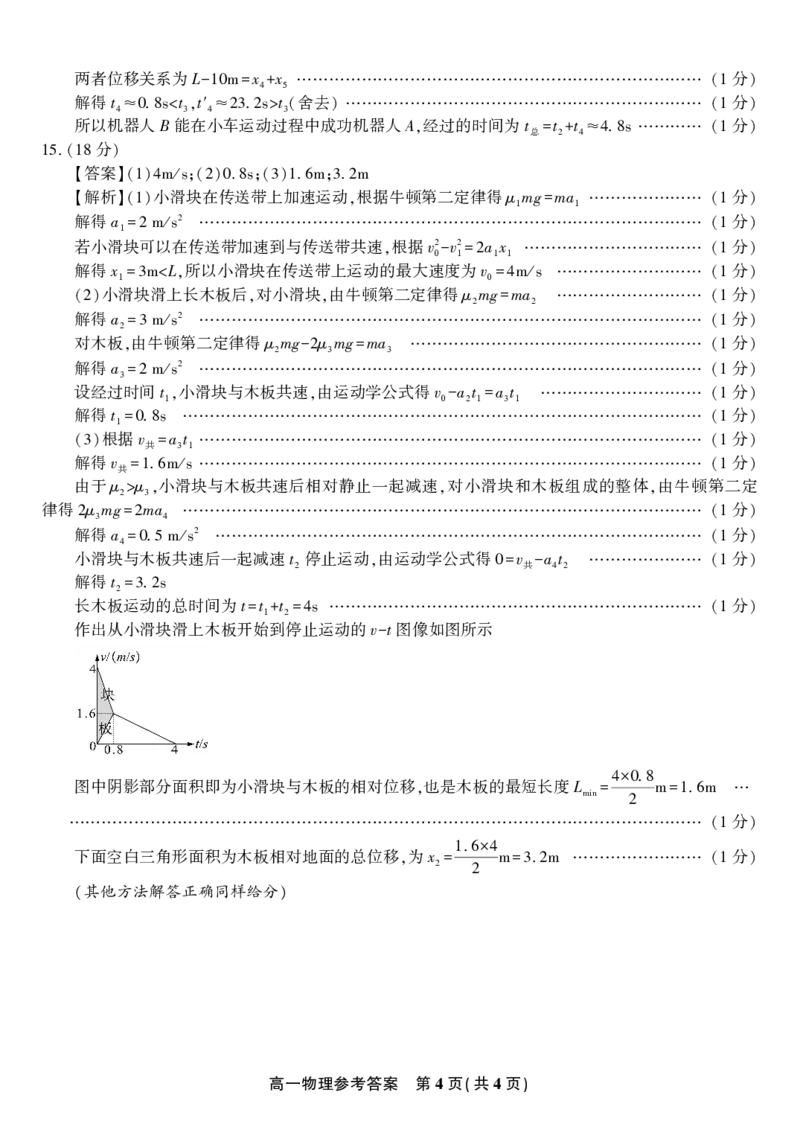
作出从小滑块滑上木板开始到停止运动的v t图像如图所示
-
.
图中阴影部分面积即为小滑块与木板的相对位移 也是木板的最短长度L 4×0 8
, min= m=1.6m …
2
分
……………………………………………………………………………………………………… (1 )
下面空白三角形面积为木板相对地面的总位移 为x 1.6×4 分
, 2= m=3.2m …………………… (1 )
2
(其他方法解答正确同样给分)
高一物理参考答案 第 4页(共4页)
{#{QQABZYYEogiIQABAARhCEQXCCgEQkACACSgOAAAUIAAAyQNABAA=}#}

