 夜雨聆风
夜雨聆风





原位打印“生长”新器官:一种可升级、可修复软体机器人的新方法
软体机器人因其优异的柔顺性和安全性,在医疗、探测等领域前景广阔。然而,其复杂的软硬复合结构导致损坏后难以维修,功能也难以升级,使得机器人整体寿命较短。
该研究开发了一种名为“原位自由形式液体三维打印”的新方法,能像“微创手术”一样,直接在已组装好的旧机器人表面,为它“生长”出全新的、功能复杂的功能部件,或修复受损的旧部件,从而显著延长机器人的使用寿命,为软体机器人的升级与维修提供了创新解决方案。
方法要点
该方法的核心是在机器人表面“原位”构建一个临时的支撑环境,进而打印出复杂结构。具体分为两步:首先,将一种具有屈服应力的水凝胶直接打印在机器人需要升级或修复部位的表面,形成一个定制的、局部的支撑“浴缸”。然后,在这个临时的水凝胶支撑内,使用多种材料通过三维打印自由地制造出带有悬空结构、高长径比等复杂几何形状的功能部件。打印完成后,部件与机器人本体无缝粘合,只需用水流冲掉支撑水凝胶即可。
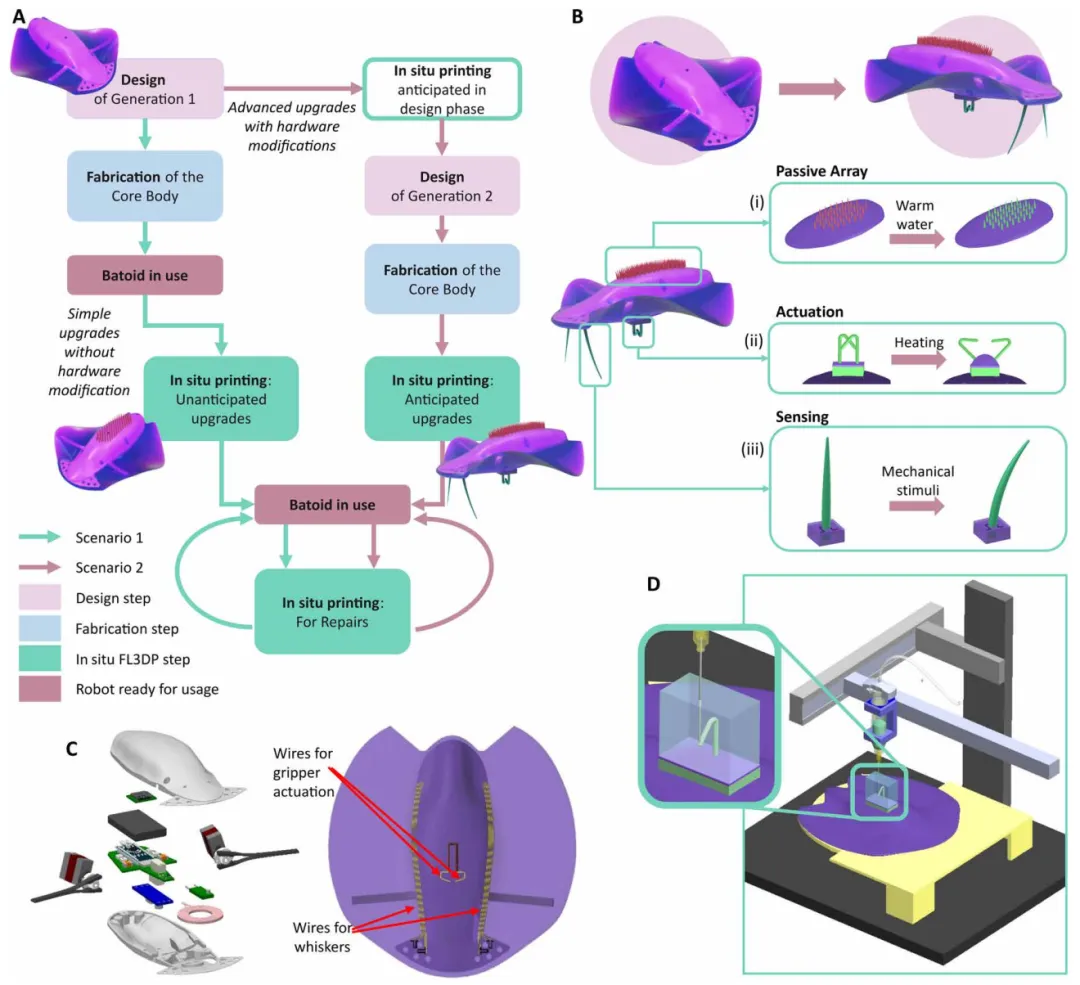
图1. (A) 展示iFL3DP如何通过两种场景在机器人生命周期内用于升级和修复的工作流程图。(B) 通过添加(i)被动温度传感、(ii)用于栖息和负载的驱动钩、以及(iii)用于障碍物检测和海床测深分析的触觉传感器,来升级一个仿鳐鱼软体游泳机器人。(C) 仿鳐鱼机器人内部结构示意图,以及为连接新组件所需从一代设计到二代设计的硬件修改。(D) 展示实现附加组件制造和直接集成的iFL3DP过程示意图
效果展示
研究团队在一个已有的仿鳐鱼游泳机器人上验证了该方法。他们成功为这个最初只能预设程序游泳的机器人,原位打印集成了三项高级功能:1)触觉传感:在机器人头部两侧打印了长须状结构,内部集成了应变传感器,可用于检测障碍物和感知海底纹理;2)抓取挂钩:在机器人腹部打印了由热驱动控制的钩状结构,能够实现栖息停靠和抓取、运载小型负载;3)被动传感阵列:在机器人背部打印了密集的高长径比短须阵列,既能通过热致变色材料被动感知温度变化,也可以利用其结构本身收集生物样本。
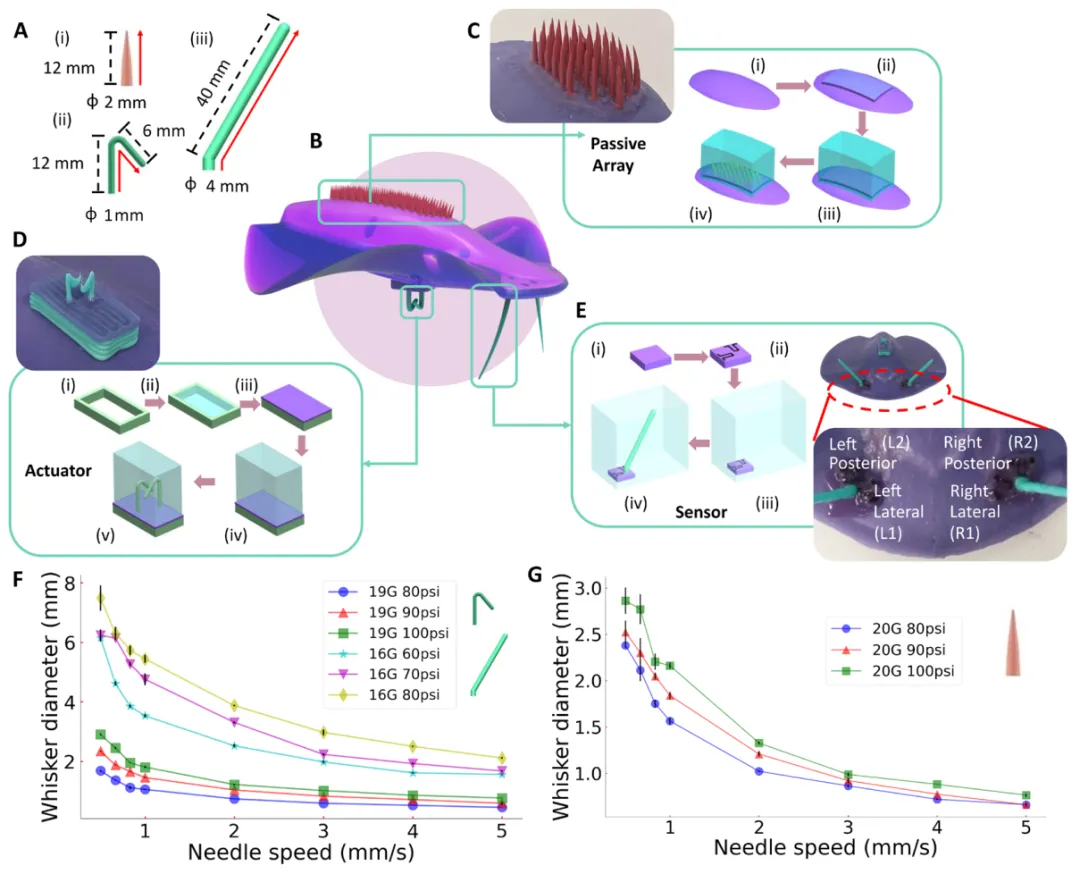
图2. 通过iFL3DP制造机器人新组件的工作流程。(A) 各种新触须特征的几何细节。(B) 带有三个新组件的仿鳐鱼机器人示意图,及相关的制造顺序。(C) 用于制造热致变色触须阵列的iFL3DP工作流程。(D) 用于制造钩状触须致动器的iFL3DP工作流程。(E) 用于制造触觉触须传感器的iFL3DP工作流程。(F) 和 (G) 打印参数对触须直径的影响
实验表明,新增的触觉传感器能可靠地检测碰撞并触发避障行为,也能在受控条件下通过分析信号差异来区分不同尺寸的海底砾石。热驱动挂钩能成功让机器人停靠在特定平台上,并能抓取、运载和释放重达7.5克的负载。整个升级过程无需拆解机器人,新增组件与本体结合牢固。
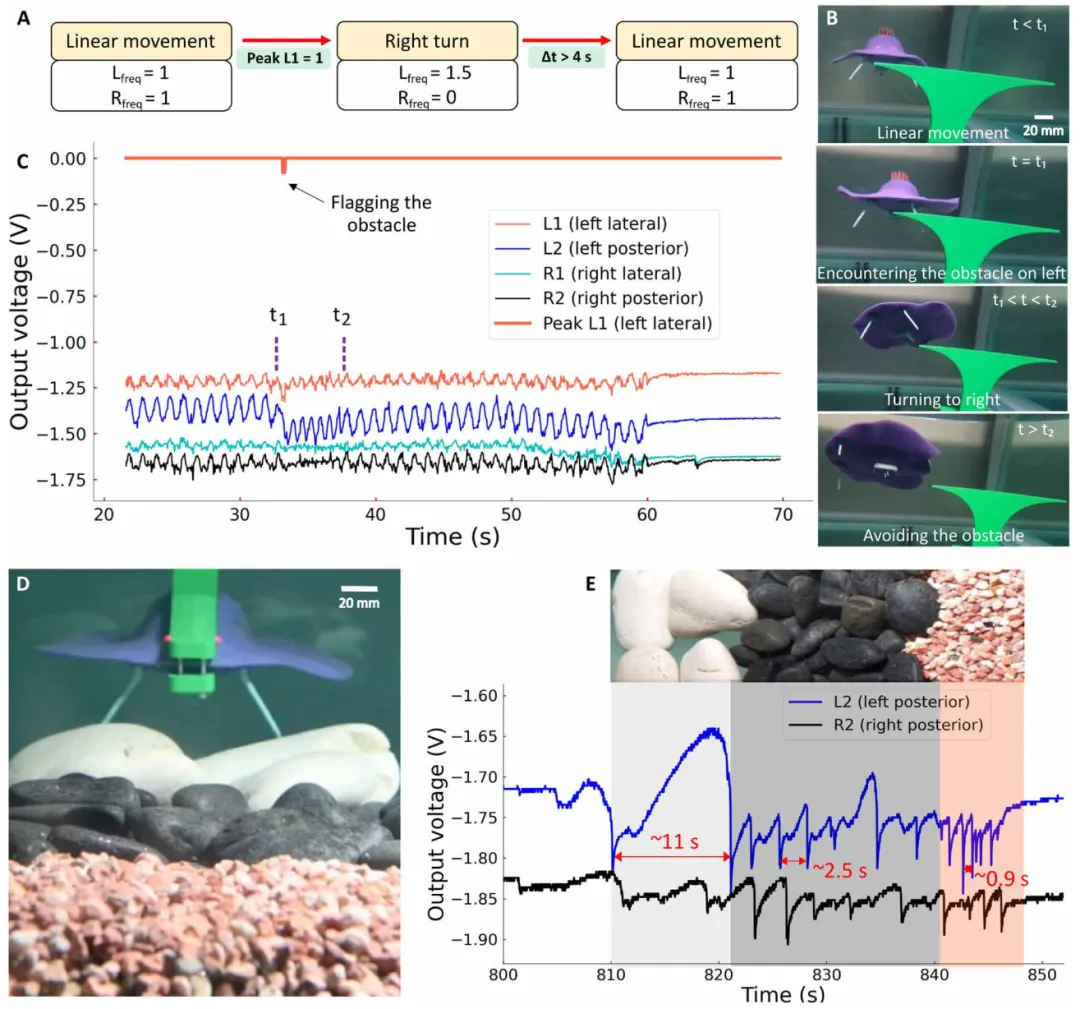
图3. 触须传感器的应用。(A) 用于障碍物检测和躲避行为的状态机图示。(B) 从电影S4中截取的展示障碍物检测过程中事件序列的快照。比例尺为20毫米。(C) 障碍物检测期间四个应变片的电压输出。(D) 仿鳐鱼机器人在由不同尺寸鹅卵石制成的人工海床上被拖曳的前视图。比例尺为20毫米。(E) 表面扫描期间后部传感器的电压输出
主要优点
-
它将“制造”与“组装/集成”步骤合二为一,避免了传统方法中分别制造、再对齐粘合的繁琐流程。
-
既能为已部署的旧机器人添加新功能,也能在新机器人设计阶段就规划好未来升级接口,为实现软体机器人的“全生命周期升级”提供了可能。
-
极大简化了维修流程,任何可打印的损坏部件都能被原位重新打印替换,从而显著延长了机器人的有效使用寿命,减少了电子废物。
主要局限
-
由于依赖于支撑凝胶与打印材料之间的界面张力,可稳定打印的特征尺寸存在下限(研究中约为100微米),这可能限制了更精细结构的制造。
-
整个流程仍涉及较多手动步骤,如机器人的精确定位、针对不规则表面的复杂打印路径生成等,工艺自动化程度可能有待提高。
推荐阅读原文:https://www.science.org/doi/10.1126/scirobotics.adn4542