 夜雨聆风
夜雨聆风适用于 e-Series 和 UR Series 机器人
最后修改时间:2026 年 5 月 13 日
来源:Universal Robots 官方发行说明
有关 PolyScope X 的最新发行说明,请参阅 软件版本 10.12.x 发行说明。
如需了解更多信息,请查阅 PolyScope 5 软件手册。
SW 5.25.2 发行说明
版本信息:
UR Software Update:5.25.2 URSim Linux:5.25.2 URSim 虚拟机:5.25.2 用户手册:5.25.0
主要特性
兼容性更新,支持 2026 年 4 月之后生产的 UR20 和 UR30 机器人所使用的新版关节。
硬件兼容性与支持
本次更新引入了对 Joint Size 2.5f 与 Joint Size 5f 更新版硬件的固件支持。
对于 2026 年 4 月之前生产的机器人,在更换新关节作为备件之前,必须先升级到本软件版本。请务必先完成软件更新,再安装更换后的关节。
请使用下表查找受影响关节尺寸对应的机器人型号:
| 必须更新 | ||
| 必须更新 |
缺陷修复
PolyScope GUI
通过 URCap API 更新带有不可达姿态的特征时,不再抛出异常。 修复了高负载条件下出现的控制器连接问题。
发布日期:2026 年 3 月 19 日
SW 5.25.1 发行说明
版本信息:
UR Software Update:5.25.1 URSim Linux:5.25.1 URSim 虚拟机:5.25.1 用户手册:5.25.0
主要特性
改进了力控(Force Control)在接近奇异点时的工作能力。 提升了新生产的 UR3e、UR7e、UR12e、UR16e 在低速运动下的运动性能。 例如焊接类运动,轨迹跟踪精度提升 25%。 改进了直接力矩控制(Direct Torque Control)。 新增手腕夹持力矩(Wrist Clamping Torque)的安全设置。
硬件兼容性与支持
本次更新引入了对 Joint Size 5 更新版硬件的固件支持。若您的机器人包含 Joint Size 5 关节,在更换新关节作为备件之前必须先升级到本软件版本。涉及以下机型:
UR20(Joint Size 5) UR30(Joint Size 5)
直接力矩控制 V2(Direct Torque Control V2)
Direct Joint Torque Control 允许进行底层的力矩控制。该脚本函数必须在每个时间步都被调用,否则机器人将自动回退到位置控制模式。
基于在 5.23 和 10.10 版本中发布的 Direct Torque Control V1 的用户反馈,我们对摩擦及静摩擦(stiction)补偿做了显著改进。同时,我们也支持对每个关节分别调整粘性(viscous)和库仑(Coulomb)摩擦参数的比例,以便用户根据具体应用灵活配置。
direct_torque(torque=[0,0,0,0,0,0], viscous_scale=<[0.9, 0.9, 0.8, 0.9, 0.9, 0.9]>, coulomb_scale=<[0.8, 0.8, 0.7, 0.8, 0.8, 0.8]>)参数说明
viscous_scale:用于定义摩擦模型中粘性补偿比例的数组,取值范围 [0–1]。该参数为可选项,如果不传入,默认值为[0.9, 0.9, 0.8, 0.9, 0.9, 0.9]。coulomb_scale:用于定义摩擦模型中库仑补偿比例的数组,取值范围 [0–1]。该参数同样为可选项,如果不传入,默认值为[0.8, 0.8, 0.7, 0.8, 0.8, 0.8]。
已弃用参数 friction_comp
旧的 friction_comp参数仍可使用,并启用之前的摩擦模型。但程序首次使用该参数时,会记录一条日志提示其已被弃用。如果同时传入了任意新参数(viscous_scale或coulomb_scale),则friction_comp将被忽略。
控制器(Controller)
力控在奇异点附近的改进
更新了用于力控的集成导纳控制器(admittance controller),使其能够在接近奇异点时正常工作——修复了机器人并未处于奇异点却被抛出运行时异常 "Force mode not possible in singularity" 的问题。 调整了 UR8L 和 UR18 的力控增益,使其表现与其他机型更加一致。
固件(Firmware)
低速运动性能提升
该改进影响 2026 年及之后生产的 UR3e、UR5e、UR7e、UR10e、UR12e、UR16e。部分较早生产的关节也可受益于此项改进。
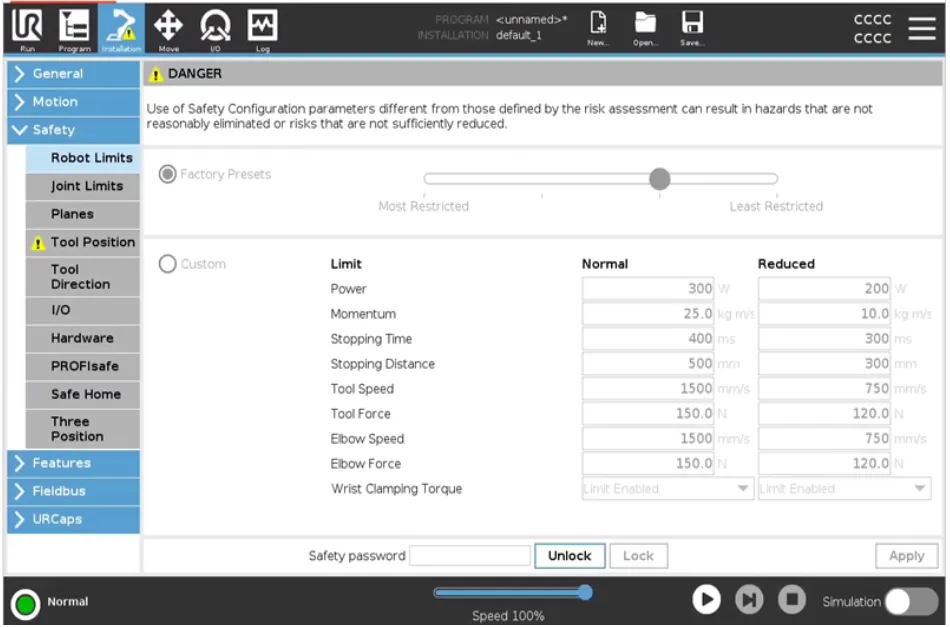
手腕夹持力矩限制(Wrist Clamping Torque Limit)
力限制(Force Limit)新增了一项设置,用于启用或禁用手腕夹持力矩限制,默认处于启用状态。该安全功能用于限制手腕在推动时可施加的力矩大小。
当该限制启用时,机器人会限制手腕关节的力矩,以防止手腕、负载与机器人下臂之间发生夹持。 该功能不属于安全等级评定项:此设置同时也对基座、肩部和肘部关节可应用的力矩窗口设定了上限。实际可达到的接触力可能明显低于 Tool Force Limit 和 Elbow Force Limit 所规定的值。
当该限制禁用时,机器人可以使用更大的腕部推力,适用于例如力控类应用。在禁用情况下,应通过其他方式来降低手腕、负载与机器人下臂之间的夹持风险。 该安全功能在以往所有机器人上都是强制启用的,自 PolyScope 5.25.1 起,用户可以将其关闭。
缺陷修复
PolyScope GUI
自动模式下,加载的子程序存在重名变量时,不再向操作员发出警告。 改进了飞行报告(flight report)的生成逻辑,修复了 SD 卡仍有充足剩余空间却被报告为已满的问题。 安全性修复。
控制器(Controller)
在 RTDE 接口中修复了一项问题:即便机器人速度因关节速度安全限制而下降, time_scale_source的输出仍始终为 1。现已能正确反映触发时间缩放的实际原因。修复了一项问题:当运动受关节速度安全限制约束时,机器人运动的时间缩放可能报告错误的来源,现在与安全相关的减速来源更清晰可辨。 修复了一项问题:在使用低速度滑块和 TCP 速度限制时,受约束的自由驱动(Constrained Freedrive)可能短暂出现超预期的速度并产生异常噪声。现在受约束的自由驱动可以在所有已测试的安全设置下正确维持速度限制。 修复了 Modbus 服务器在控制器启动后短时间内建立连接时,对任何功能码请求都不响应的问题。 降低了在执行保护性停止(protective stop)过程中误报 C283A093故障的概率。修复了 SW 5.23 引入的两个 Modbus 通用寄存器同步读取相关问题: 当控制器正在初始化机械臂或正在启动时,Modbus 读取已写入的值时会失败,返回的全是 0。这也会延迟写入的实际生效时间。该问题通常表现为:在控制器启动或正在给机械臂上电时,Modbus 读取到的值是错误的。 如果通过 Modbus 写入了寄存器,紧接着对连续多个寄存器进行 Modbus 读取,少数情况下会被拆分或延迟,结果中部分是新值、部分仍是旧值。
嵌入式(Embedded)
修复了一项问题:系统运行正常时,在特定的手腕姿态下仍会出现误报的 C281A3故障。
发布日期:2025 年 12 月 16 日
SW 5.25.0 发行说明
版本信息:
UR Software Update:5.25.0 URSim Linux:5.25.0 URSim 虚拟机:5.25.0 用户手册:5.25.0
主要特性
符合 PROFIsafe 标准信号要求。
安全(Safety)
PROFIsafe 输出信号已被反转,以符合 PROFIsafe 标准以及通用的安全标准。本版本及后续所有版本的软件将使用低电平有效(active low)的 PROFIsafe 信号(信号值为 '0')。PolyScope 5 之前的版本则使用高电平有效(active high)的 PROFIsafe 信号(信号值为 '1')。
请注意:这是对所有现场已部署的 PROFIsafe 安装的破坏性变更!
更多详情请参阅 用户手册 以及 PROFIsafe 升级指南。
URCap 软件平台
控制器(Controller)
强化了实时数据交换(RTDE)协议的输入接口。 控制器对输入数据大小做了更严格的校验,可在出现缓冲区溢出风险时主动断开客户端连接。Recipe ID、频率以及字符串类输入会经过合理性检查,若包含危险字符或超出范围则会被拒绝。RTDE 接收端现引入了输入速率限制:允许 10 条消息的突发,但之后会强制约 2 毫秒的处理间隔。 速度自动下调(Velocity scale-down)。 在某些特殊情况下,系统会略微降低速度以避免触发机器人停止。该机制仅在以下情况发生:Safety Force Limit 设置高于 250 N,并且基座关节高速运动,同时肘部或工具靠近基座关节的旋转轴。
嵌入式(Embedded)
改进了 UR8L、UR15 和 UR18 机器人在极低速(小于 800 µrad/s)和静止状态下,肩部和基座关节的运动性能。
缺陷修复
控制器(Controller)
修复了力模式下的一项问题:机器人运动至奇异点时会出现 C306A003故障 "Acceleration failed to pass sanity check"。
嵌入式(Embedded)
减小了类别 2 保护性停止(如 3PE 停止以及安全护栏触发的停止)允许的运动幅度。 可配置输出 6 和 7 上的 OSSD 信号现在能按预期工作,可产生 1 ms 的"低"脉冲。
