 夜雨聆风
夜雨聆风为什么未来属于无线,而不仅仅属于光
最近两年,硅谷最火的投资主题之一无疑是“光”。
从CPO(Co-Packaged Optics)到硅光子,从光互连到光交换,几乎所有与光通信相关的公司都受到资本追捧。背后的原因也很简单:
AI正在推动数据中心进入前所未有的算力时代。
当数万块GPU组成训练集群时,最大的瓶颈往往不再是计算,而是数据搬运。
于是,一个行业共识逐渐形成:
AI时代需要光,而不是电。
因为在数据中心内部,光纤拥有更高带宽、更低损耗和更低延迟,能够解决GPU之间海量数据交换的问题。
这一判断并没有错。
但我认为,它只看到了AI发展的上半场。
数据中心是AI的起点,而不是终点
今天的大模型训练主要发生在固定的数据中心。
因此整个产业链的关注点都集中在:
GPU 高速交换机 CPO 硅光子 光互连
本质上是在解决一个问题:
如何把更多数据搬运到更多GPU之间。
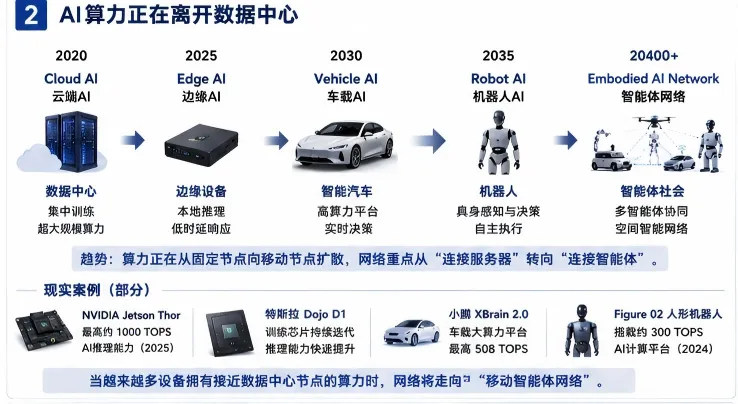
但如果我们把时间轴拉长,会发现AI的发展方向正在发生变化。
越来越多的算力开始离开数据中心。
从云端走向边缘。
从边缘走向设备。
从设备走向机器人。
从机器人走向现实世界。
这一趋势已经开始出现。
例如,英伟达推出的 Jetson Thor 平台面向机器人和具身智能应用,最高可提供约1000 TOPS级AI推理能力。
自动驾驶汽车上的车载计算平台同样正在快速增长,其实时推理能力已经远远超过传统嵌入式系统。
换句话说:
未来的机器人、无人车、无人机、人形机器人,正在逐渐拥有接近数据中心节点的计算能力。
当越来越多高算力节点开始移动时,一个新的问题出现了:
它们如何彼此协作?
AI下半场:移动智能体网络
互联网时代的网络连接的是人。
移动互联网时代的网络连接的是手机。
而未来的网络,连接的对象可能是:
机器人 无人车 无人机 自动化设备 工业机械 人形机器人
这些设备有一个共同特点:
它们不仅会通信。
它们还会移动。
于是网络问题发生了根本变化。
过去:
谁拥有数据?
未来:
谁在什么位置?
位置开始变得比数据本身更重要。
因为对于一个移动智能体来说,空间关系本身就是信息。
为什么无线会重新变得重要
光最大的优势是带宽。
但光有一个天然限制:
它依赖路径。
无论是光纤还是激光通信,本质上都需要一条可控的传播通道。
而移动智能体面对的是一个完全不同的世界:
随时移动 动态组网 环境变化 遮挡频繁 不存在固定链路
此时真正重要的能力变成:
不仅知道对方是谁,还要知道对方在哪里。
而这正是无线天然擅长的领域。
无线不仅能传输数据。
无线还能感知空间。
距离、速度、角度、多普勒、方向。
这些都是光纤无法提供的信息。
因此未来智能体网络需要解决的,已经不是单纯的数据搬运问题,而是空间认知问题。
从Communication到Spatial Intelligence
过去几十年,无线通信的发展目标始终非常明确:
提高传输能力。
更高速率。
更低时延。
更高频谱效率。
但对于机器人网络而言,仅仅建立连接是不够的。
因为连接并不等于可信。
举一个简单例子。
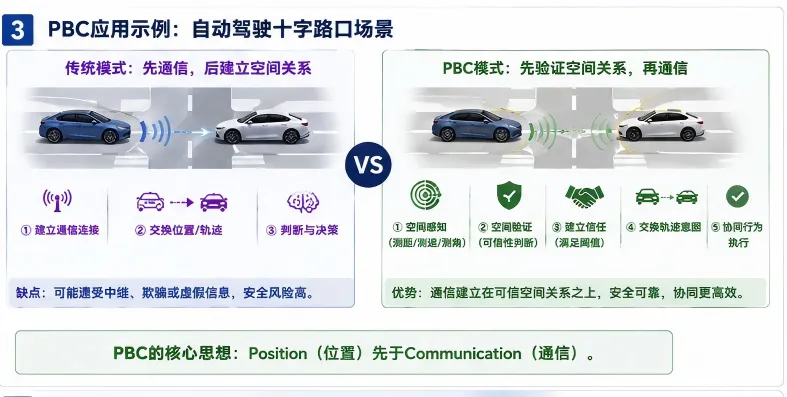
两台自动驾驶汽车在十字路口相遇。
传统思维下:
两车首先建立通信连接,然后交换位置和轨迹信息。
而在未来的空间智能网络中:
它们首先通过无线感知验证彼此的空间关系:
距离是多少? 相对速度是多少? 方向是否合理? 目标身份是否可信?
只有当这些空间信息达到可信阈值后,双方才开始交换轨迹规划和控制信息。
这个过程可以概括为:
Position Before Communication(PBC)
先确认空间关系。
再建立通信关系。
这是未来智能体网络与传统互联网最大的区别。
Position-Before-Communication:空间智能的基础协议
我们提出一个新的网络原则:
Position-Before-Communication(PBC)
中文可以理解为:
先定位,再通信。
或者:
先建立可信空间关系,再交换信息。
这与今天的互联网形成鲜明对比。
传统互联网遵循:
认证 → 建链 → 通信而未来智能体网络更可能演化为:
空间验证↓建立空间信任↓允许通信↓协同行为在这种架构下:
位置不再是附属信息。
而成为网络信任的基础。
为什么空间关系会成为新的信任基础
网络安全过去关注的是身份认证。
零信任(Zero Trust)的核心思想是:
Never Trust, Always Verify
永不默认信任,持续验证。
但对于机器人世界来说,仅验证身份是不够的。
因为:
身份可以被转发 数据可以被伪造 通信可以被中继
然而空间关系很难伪造。
一个目标到底距离你20米还是200米。
一个机器人是否真的在安全区域内。
这些都是物理世界客观存在的事实。
因此未来智能体网络很可能演化出一种新的信任机制:
Physical Trust
物理信任。
其核心不是验证身份,而是验证空间关系。
这正是Position-Before-Communication背后的逻辑。
光属于数据中心,无线属于现实世界
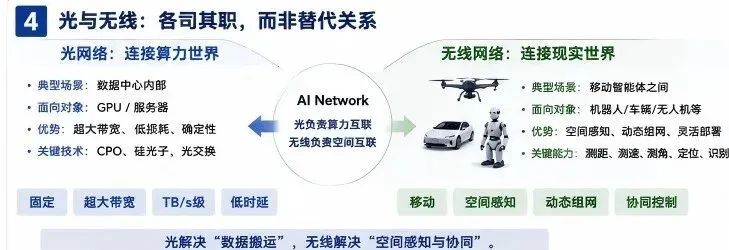
从更底层的角度看,我认为光与无线并不是竞争关系。
它们服务于两个不同层次的世界。
光通信解决的是:
固定算力之间的数据搬运问题。
无线通信解决的是:
移动智能体之间的空间协同问题。
如果说光是AI数据中心的神经纤维。
那么无线更像未来机器人社会的感知系统。
数据中心需要的是:
TB/s带宽 超低时延 大规模并行互连
而机器人网络需要的是:
距离感知 空间理解 动态组网 实时协同
这两个需求完全不同。
因此未来并不会出现:
光取代无线。
而更可能是:
光负责连接算力中心,无线负责连接现实世界。
一个可能的未来
过去20年,无线连接的是人。
未来20年,无线连接的将是智能体。
当机器人、无人车、无人机和工业设备都拥有接近数据中心节点的算力时,网络的核心问题将不再是“如何传输更多数据”,而是:
如何确认空间关系是否可信。
如果说移动互联网定义了人与信息的连接方式。
那么未来的空间智能网络,或许将定义智能体与现实世界的连接方式。
问题已经不是:
无线是否还有未来。
而是:
谁将首先定义智能体之间的空间交互协议?
也许,Position-Before-Communication(PBC)正是这个答案的起点。

