

文档内容
如东中学 2023 级 高二数学
一、选择题:本题共 8 小题,每小题 5 分,共 40 分. 在每小题给出的四个
选项中,只有一个选项是正确的.请把正确的选项填涂在答题卡相应的位置上.
1.若直线 的倾斜角为 ,则 ( ).
A.0 B. C. D.不存在
2.已知直角梯形 ,且 , , , ,则过其中三点的圆的方程
可以为( )
A. B.
C. D.
3. 已知直线 : 和直线 : ,则 是“ ∥ ”的(
)
A. 必要不充分条件 B. 充分不必要条件
C. 充要条件 D. 既不充分也不必要条件
4.已知圆 的方程为 ,若点 在圆外,则 的取
值范围是( )
A. B. C. D.
5.设点 ,若直线 与线段 有交点,则 的取值范围是( )
A. B. C. D.
6.已知直线 : 与直线 : 交于点P(x ,y ),则 的最
0 0
大值为( )
A.4 B.8 C.32 D.64
学科网(北京)股份有限公司7.已知直线 与圆 交于不同的两点 ,O是坐标原点,且有
,则实数k的取值范围是( )
A. B. C. D.
8.数学中有许多形状优美,寓意美好的曲线,曲线C: 就是其中之一 如图
,给出下列三个结论:
①曲线C所围成的“心形”区域的面积大于3
②曲线C恰好经过8个整点 即横、纵坐标均为整数的点
③曲线C上任意一点到原点的距离都不超过
其中,所有正确结论的序号是( )
A.①② B.①③ C.③ D.①
二、选择题:本题共 3 小题,每小题 6 分,共 18 分. 在每小题给出的选项中,有多项
符合题目要求. 全部选对得 6 分,部分选对的得部分分,选对但不全的得部分分,有选错
的得0分.
9.对于直线 .以下说法正确的有( )
A. 的充要条件是 B.当 时,
C.直线 一定经过点 D.点 到直线 的距离的最大值为5
10.设圆 ,直线 , 为 上的动点,过点 作圆 的两
条切线 、 ,切点分别为 、 ,则下列说法中正确的有( )
A. 的取值范围为 B.四边形 面积的最小值为
C.存在点 使 D.直线 过定点
11.“曼哈顿距离”是十九世纪的赫尔曼-闵可夫斯基所创词汇,用以标明两个点在标准坐标
学科网(北京)股份有限公司系上的绝对轴距总和,其定义如下:在直角坐标平面上任意两点 的曼哈
顿距离 ,则下列结论正确的是( )
A.若点 ,则
B.若点 ,则在 轴上存在点 ,使得
C.若点 ,点 在直线 上,则 的最小值是3
D.若点 在 上,点 在直线 上,则 的值可能是4
三、填空题:本题共 3 小题,每小题 5 分,共 15 分.
12.圆 与圆 的位置关系为 .
13.经过两条直线 与 的交点,且在y轴上的截距是 轴上的3倍的
直线方程为 .
14.已知圆O: 圆 : ,则下列结论正确的是 .
①无论k取何值,圆心 始终在直线 上;
②若圆O与圆 有公共点,则实数k的取值范围为 ;
③若圆O与圆 的公共弦长为 ,则 或 ;
④与两个圆都相切的直线叫做这两个圆的公切线,如果两个圆在公切线的同侧,则这条公
切线叫做这两个圆的外公切线,当 时,两圆的外公切线长为 .
四、解答题:本题共5小题,共77分。解答应写出文字说明、证明过程或演算步骤。
15.根据下列条件,分别求满足条件的直线或圆的方程:
(1)已知以点A(−1,2)为圆心的圆与直线 相切,过点 的动直线 与
学科网(北京)股份有限公司圆A相交于 ,当 时,求直线 的方程.
(2)以 为圆心的圆与圆 相切,求圆 的方程.
16.已知直线 .
(1)求证:直线 过定点;
(2)若直线 不经过第二象限,求实数 的取值范围;
(3)若直线 与两坐标轴的正半轴围成的三角形面积最小,求 的方程.
17.已知以点 为圆心的圆经过原点 ,且与 轴交于点 ,与 轴交于点 ,
A、B异于原点
(1)求证: 的面积为定值.
(2)设直线 与圆 交于点 , ,若 ,求圆 的方程.
(3)在(2)的条件下,设 , 分别是直线 和圆 上的动点,求 的
最小值及此时点 的坐标.
18.已知圆 过点 ,且与圆 关于直线 对称.
(1)判断圆 与圆 的位置关系,并说明理由;
(2)过点 作两条相异直线分别与 相交于 , .
若直线 和直线 互相垂直,求 的最大值;
①若直线 和直线 与 轴分别交于点 、 ,且 , 为坐标原点,试
②判断直线 和 是否平行?请说明理由.
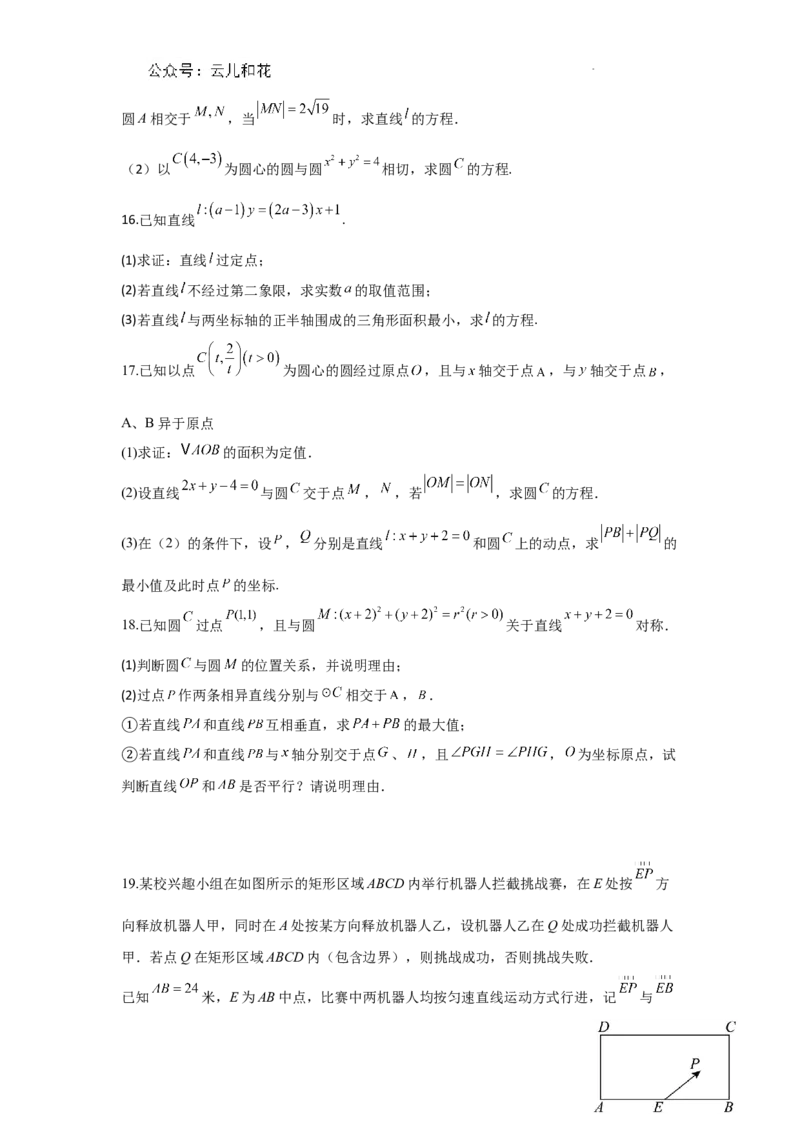
19.某校兴趣小组在如图所示的矩形区域ABCD内举行机器人拦截挑战赛,在E处按 方
向释放机器人甲,同时在A处按某方向释放机器人乙,设机器人乙在Q处成功拦截机器人
甲.若点Q在矩形区域ABCD内(包含边界),则挑战成功,否则挑战失败.
已知 米,E为AB中点,比赛中两机器人均按匀速直线运动方式行进,记 与
学科网(北京)股份有限公司的夹角为 .
(1)若 ,AD足够长,机器人乙的速度是机器人甲的速度的 倍,则如何设置机器人
乙的释放角度才能挑战成功?
(2)若机器人乙的速度是机器人甲的速度的2倍,应如何设计矩形区域ABCD的宽AD的长
度,才能确保无论 的值为多少,总可以通过设置机器人乙的释放角度使机器人乙在矩形
区域ABCD内成功拦截机器人甲?
学科网(北京)股份有限公司

