文档内容
2024年高考河北卷物理
一、单选题
1.锂是新能源汽车、储能和信息通信等新兴产业的关键材料.研究表明,锂元素主要来自宇宙线高能粒子与星际物质
的原子核产生的散裂反应,其中一种核反应方程为 ,式中的X为( )
A. B. C. D.
【答案】D
【详解】根据核反应前后质量数和电荷数守恒得 ,
式中的X为 ,
故选D。
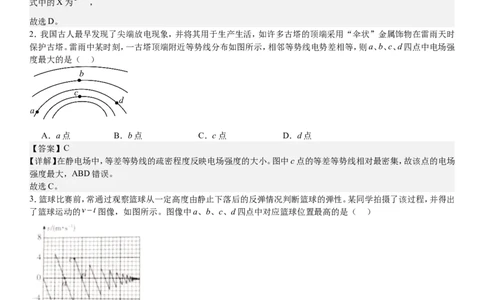
2.我国古人最早发现了尖端放电现象,并将其用于生产生活,如许多古塔的顶端采用“伞状”金属饰物在雷雨天时
保护古塔。雷雨中某时刻,一古塔顶端附近等势线分布如图所示,相邻等势线电势差相等,则a、b、c、d四点中电场强
度最大的是( )
A.a点 B.b点 C.c点 D.d点
【答案】C
【详解】在静电场中,等差等势线的疏密程度反映电场强度的大小。图中c点的等差等势线相对最密集,故该点的电场
强度最大,ABD错误。
故选C。
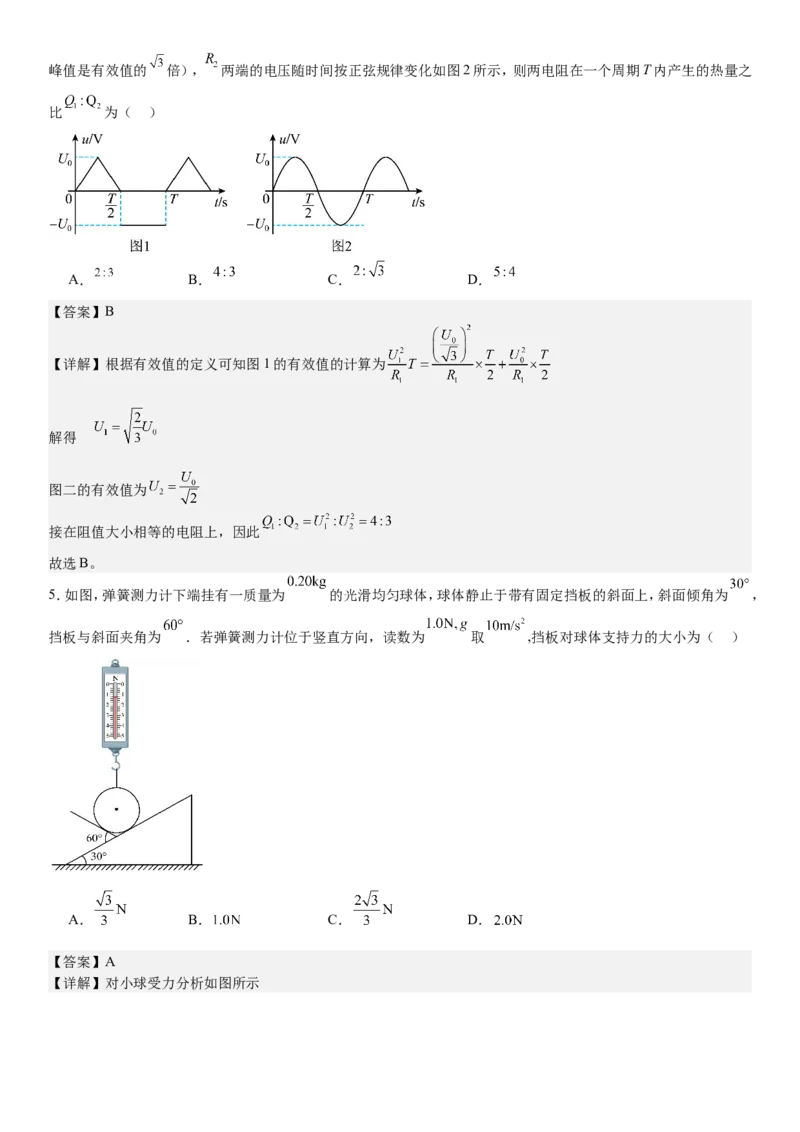
3.篮球比赛前,常通过观察篮球从一定高度由静止下落后的反弹情况判断篮球的弹性。某同学拍摄了该过程,并得出
了篮球运动的 图像,如图所示。图像中a、b、c、d四点中对应篮球位置最高的是( )
A.a点 B.b点 C.c点 D.d点
【答案】A
【详解】根据图像可知,图像第四象限表示向下运动,速度为负值。当向下运动到速度最大时篮球与地面接触,运动发
生突变,速度方向变为向上并做匀减速运动。故第一次反弹后上升至a点,此时速度第一次向上减为零,到达离地面
最远的位置。因此四个点中篮球位置最高的是a点。BCD错误。
故选A。
4. 为两个完全相同的定值电阻, 两端的电压随时间周期性变化的规律如图1所示(三角形脉冲交流电压的峰值是有效值的 倍), 两端的电压随时间按正弦规律变化如图2所示,则两电阻在一个周期T内产生的热量之
比 为( )
A. B. C. D.
【答案】B
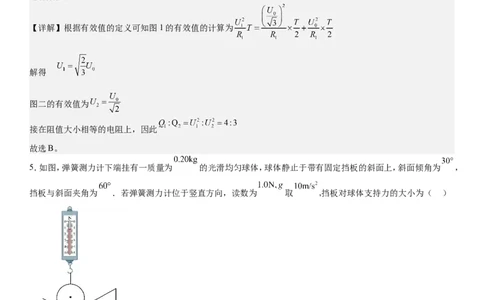
【详解】根据有效值的定义可知图1的有效值的计算为
解得
图二的有效值为
接在阻值大小相等的电阻上,因此
故选B。
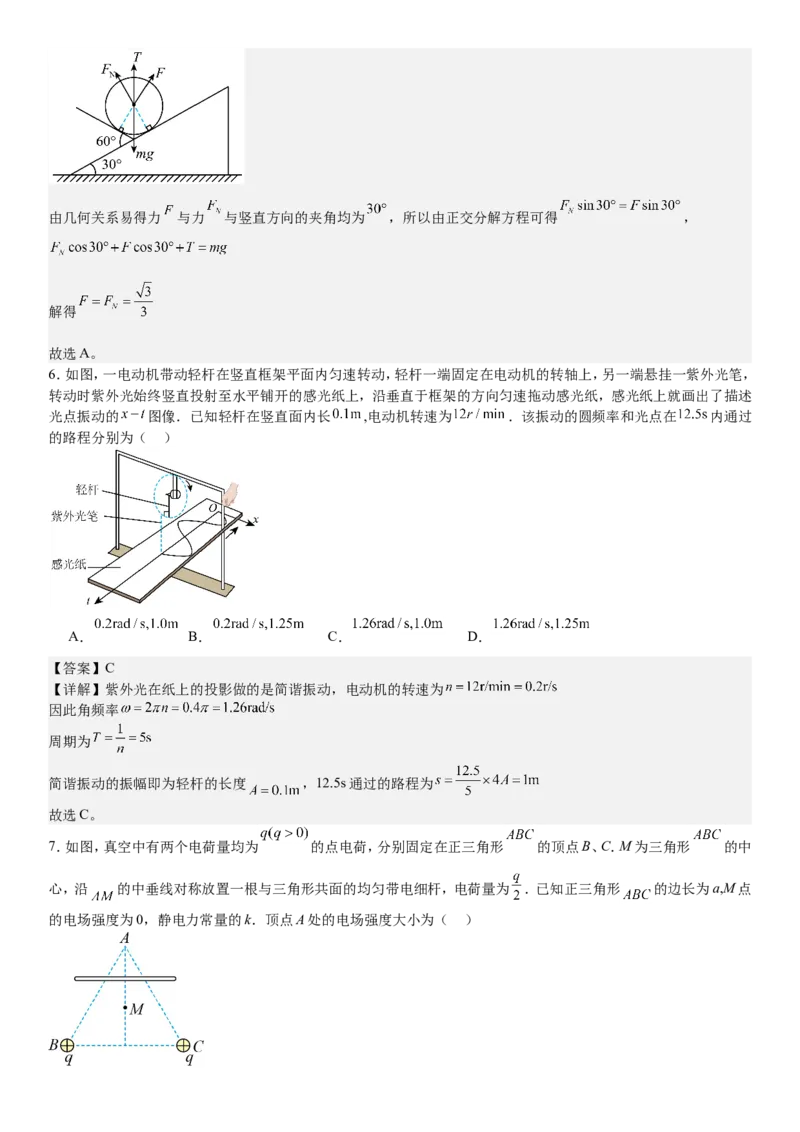
5.如图,弹簧测力计下端挂有一质量为 的光滑均匀球体,球体静止于带有固定挡板的斜面上,斜面倾角为 ,
挡板与斜面夹角为 .若弹簧测力计位于竖直方向,读数为 取 ,挡板对球体支持力的大小为( )
A. B. C. D.
【答案】A
【详解】对小球受力分析如图所示由几何关系易得力 与力 与竖直方向的夹角均为 ,所以由正交分解方程可得 ,
解得
故选A。
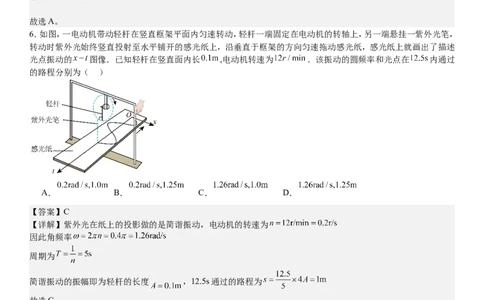
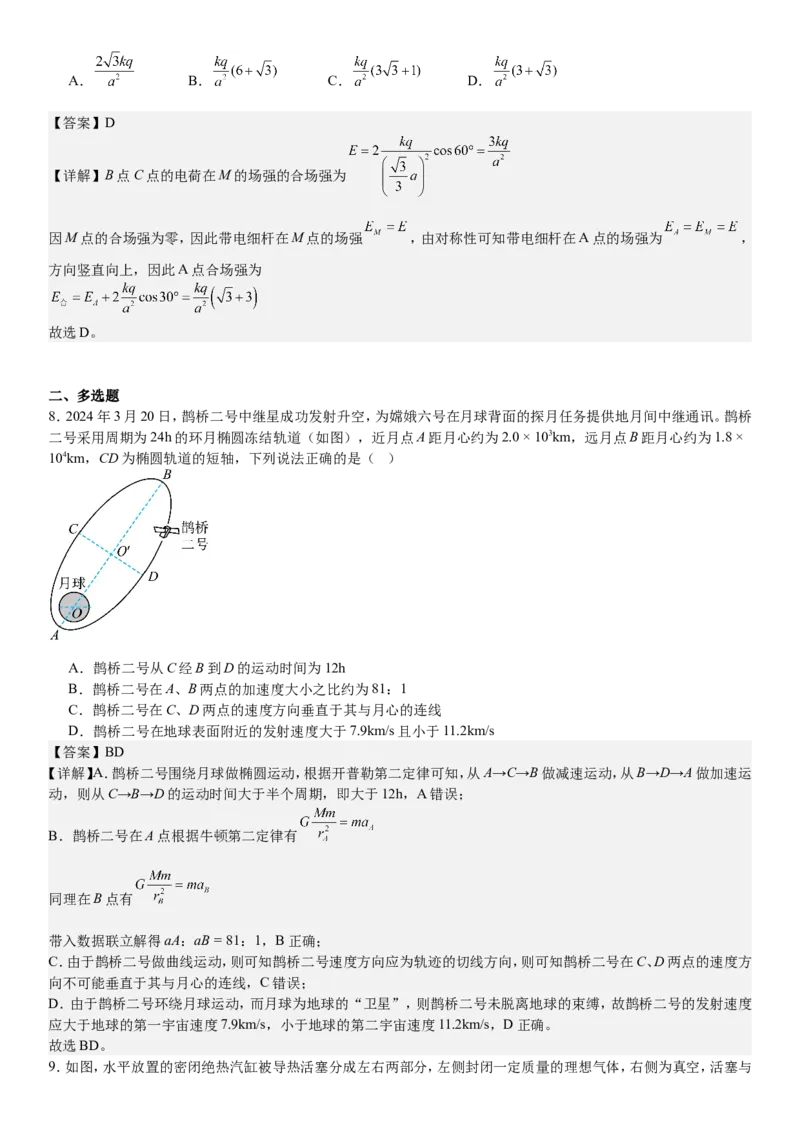
6.如图,一电动机带动轻杆在竖直框架平面内匀速转动,轻杆一端固定在电动机的转轴上,另一端悬挂一紫外光笔,
转动时紫外光始终竖直投射至水平铺开的感光纸上,沿垂直于框架的方向匀速拖动感光纸,感光纸上就画出了描述
光点振动的 图像.已知轻杆在竖直面内长 ,电动机转速为 .该振动的圆频率和光点在 内通过
的路程分别为( )
A. B. C. D.
【答案】C
【详解】紫外光在纸上的投影做的是简谐振动,电动机的转速为
因此角频率
周期为
简谐振动的振幅即为轻杆的长度 ,12.5s通过的路程为
故选C。
7.如图,真空中有两个电荷量均为 的点电荷,分别固定在正三角形 的顶点B、C.M为三角形 的中
心,沿 的中垂线对称放置一根与三角形共面的均匀带电细杆,电荷量为 .已知正三角形 的边长为a,M点
的电场强度为0,静电力常量的k.顶点A处的电场强度大小为( )A. B. C. D.
【答案】D
【详解】B点C点的电荷在M的场强的合场强为
因M点的合场强为零,因此带电细杆在M点的场强 ,由对称性可知带电细杆在A点的场强为 ,
方向竖直向上,因此A点合场强为
故选D。
二、多选题
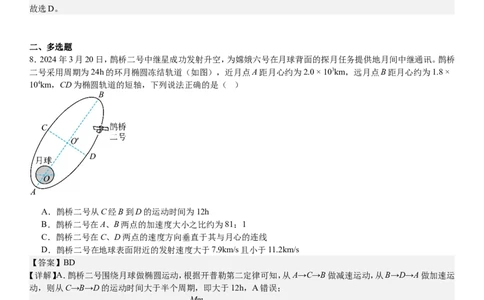
8.2024年3月20日,鹊桥二号中继星成功发射升空,为嫦娥六号在月球背面的探月任务提供地月间中继通讯。鹊桥
二号采用周期为24h的环月椭圆冻结轨道(如图),近月点A距月心约为2.0 × 103km,远月点B距月心约为1.8 ×
104km,CD为椭圆轨道的短轴,下列说法正确的是( )
A.鹊桥二号从C经B到D的运动时间为12h
B.鹊桥二号在A、B两点的加速度大小之比约为81:1
C.鹊桥二号在C、D两点的速度方向垂直于其与月心的连线
D.鹊桥二号在地球表面附近的发射速度大于7.9km/s且小于11.2km/s
【答案】BD
【详解】A.鹊桥二号围绕月球做椭圆运动,根据开普勒第二定律可知,从A→C→B做减速运动,从B→D→A做加速运
动,则从C→B→D的运动时间大于半个周期,即大于12h,A错误;
B.鹊桥二号在A点根据牛顿第二定律有
同理在B点有
带入数据联立解得aA:aB = 81:1,B正确;
C.由于鹊桥二号做曲线运动,则可知鹊桥二号速度方向应为轨迹的切线方向,则可知鹊桥二号在C、D两点的速度方
向不可能垂直于其与月心的连线,C错误;
D.由于鹊桥二号环绕月球运动,而月球为地球的“卫星”,则鹊桥二号未脱离地球的束缚,故鹊桥二号的发射速度
应大于地球的第一宇宙速度7.9km/s,小于地球的第二宇宙速度11.2km/s,D正确。
故选BD。
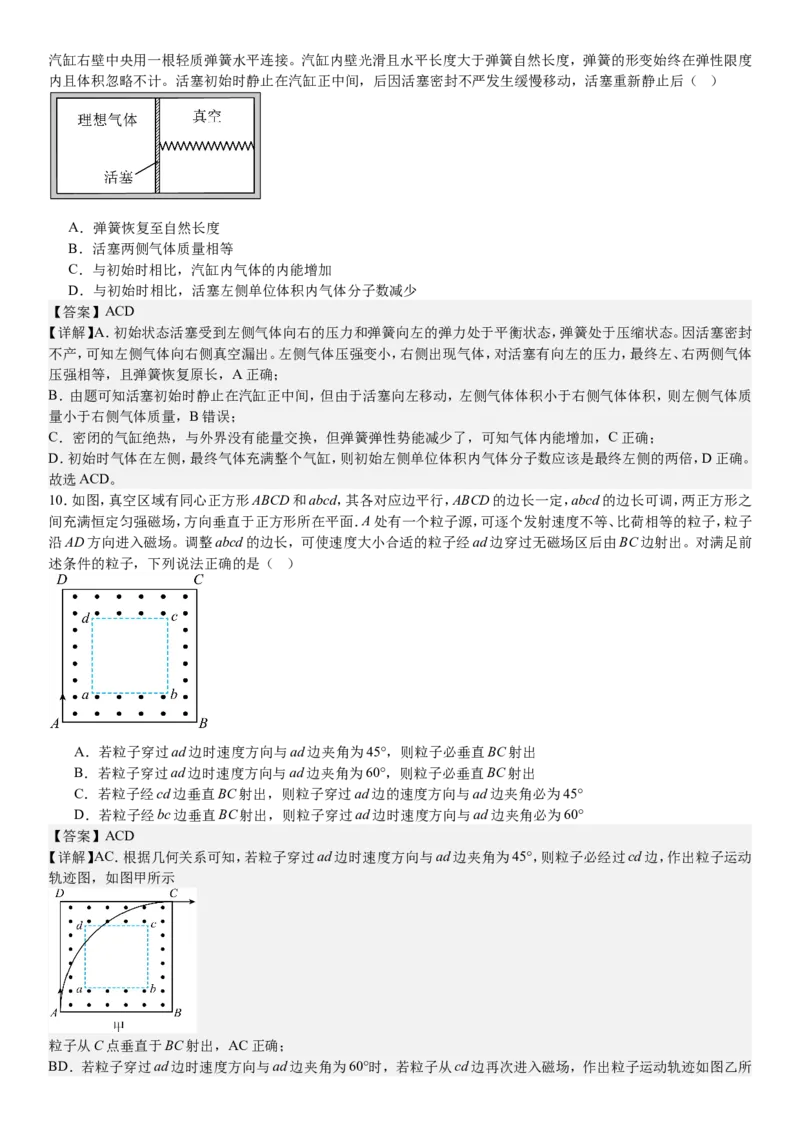
9.如图,水平放置的密闭绝热汽缸被导热活塞分成左右两部分,左侧封闭一定质量的理想气体,右侧为真空,活塞与汽缸右壁中央用一根轻质弹簧水平连接。汽缸内壁光滑且水平长度大于弹簧自然长度,弹簧的形变始终在弹性限度
内且体积忽略不计。活塞初始时静止在汽缸正中间,后因活塞密封不严发生缓慢移动,活塞重新静止后( )
A.弹簧恢复至自然长度
B.活塞两侧气体质量相等
C.与初始时相比,汽缸内气体的内能增加
D.与初始时相比,活塞左侧单位体积内气体分子数减少
【答案】ACD
【详解】A.初始状态活塞受到左侧气体向右的压力和弹簧向左的弹力处于平衡状态,弹簧处于压缩状态。因活塞密封
不产,可知左侧气体向右侧真空漏出。左侧气体压强变小,右侧出现气体,对活塞有向左的压力,最终左、右两侧气体
压强相等,且弹簧恢复原长,A正确;
B.由题可知活塞初始时静止在汽缸正中间,但由于活塞向左移动,左侧气体体积小于右侧气体体积,则左侧气体质
量小于右侧气体质量,B错误;
C.密闭的气缸绝热,与外界没有能量交换,但弹簧弹性势能减少了,可知气体内能增加,C正确;
D.初始时气体在左侧,最终气体充满整个气缸,则初始左侧单位体积内气体分子数应该是最终左侧的两倍,D正确。
故选ACD。
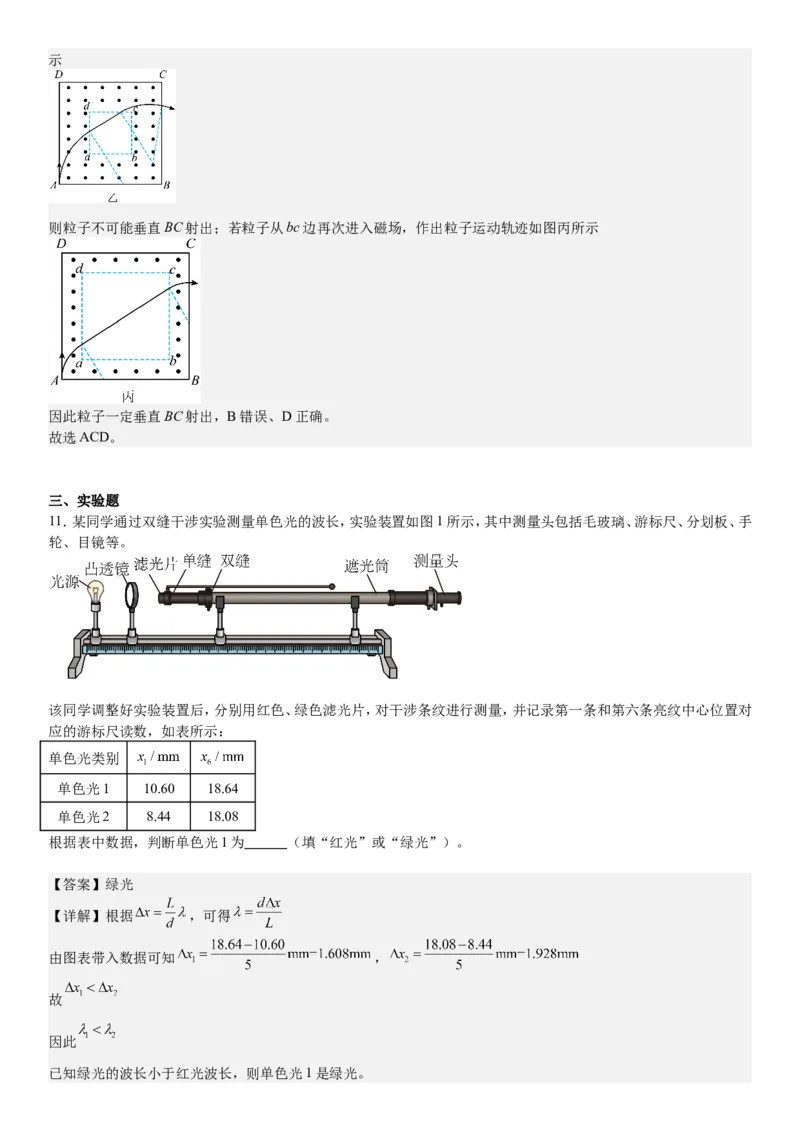
10.如图,真空区域有同心正方形ABCD和abcd,其各对应边平行,ABCD的边长一定,abcd的边长可调,两正方形之
间充满恒定匀强磁场,方向垂直于正方形所在平面.A处有一个粒子源,可逐个发射速度不等、比荷相等的粒子,粒子
沿AD方向进入磁场。调整abcd的边长,可使速度大小合适的粒子经ad边穿过无磁场区后由BC边射出。对满足前
述条件的粒子,下列说法正确的是( )
A.若粒子穿过ad边时速度方向与ad边夹角为45°,则粒子必垂直BC射出
B.若粒子穿过ad边时速度方向与ad边夹角为60°,则粒子必垂直BC射出
C.若粒子经cd边垂直BC射出,则粒子穿过ad边的速度方向与ad边夹角必为45°
D.若粒子经bc边垂直BC射出,则粒子穿过ad边时速度方向与ad边夹角必为60°
【答案】ACD
【详解】AC.根据几何关系可知,若粒子穿过ad边时速度方向与ad边夹角为45°,则粒子必经过cd边,作出粒子运动
轨迹图,如图甲所示
粒子从C点垂直于BC射出,AC正确;
BD.若粒子穿过ad边时速度方向与ad边夹角为60°时,若粒子从cd边再次进入磁场,作出粒子运动轨迹如图乙所示
则粒子不可能垂直BC射出;若粒子从bc边再次进入磁场,作出粒子运动轨迹如图丙所示
因此粒子一定垂直BC射出,B错误、D正确。
故选ACD。
三、实验题
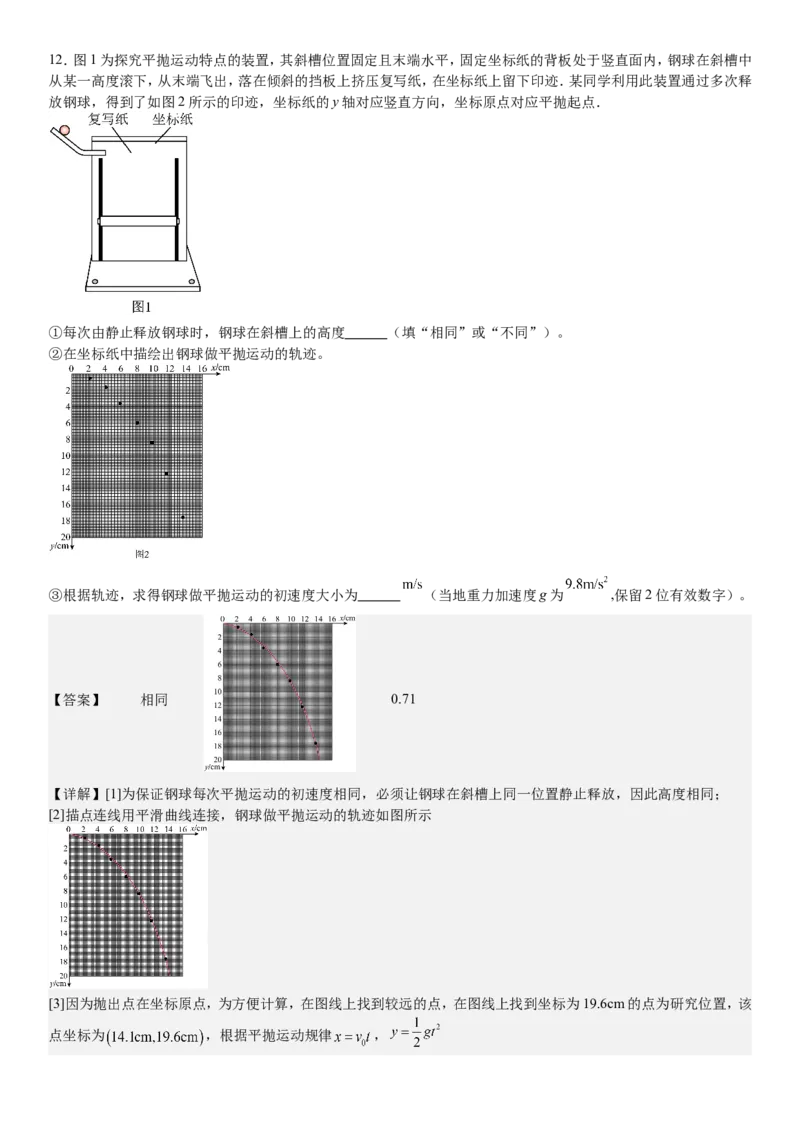
11.某同学通过双缝干涉实验测量单色光的波长,实验装置如图1所示,其中测量头包括毛玻璃、游标尺、分划板、手
轮、目镜等。
该同学调整好实验装置后,分别用红色、绿色滤光片,对干涉条纹进行测量,并记录第一条和第六条亮纹中心位置对
应的游标尺读数,如表所示:
单色光类别
单色光1 10.60 18.64
单色光2 8.44 18.08
根据表中数据,判断单色光1为 (填“红光”或“绿光”)。
【答案】绿光
【详解】根据 ,可得
由图表带入数据可知 ,
故
因此
已知绿光的波长小于红光波长,则单色光1是绿光。12.图1为探究平抛运动特点的装置,其斜槽位置固定且末端水平,固定坐标纸的背板处于竖直面内,钢球在斜槽中
从某一高度滚下,从末端飞出,落在倾斜的挡板上挤压复写纸,在坐标纸上留下印迹.某同学利用此装置通过多次释
放钢球,得到了如图2所示的印迹,坐标纸的y轴对应竖直方向,坐标原点对应平抛起点.
①每次由静止释放钢球时,钢球在斜槽上的高度 (填“相同”或“不同”)。
②在坐标纸中描绘出钢球做平抛运动的轨迹。
③根据轨迹,求得钢球做平抛运动的初速度大小为 (当地重力加速度g为 ,保留2位有效数字)。
【答案】 相同 0.71
【详解】[1]为保证钢球每次平抛运动的初速度相同,必须让钢球在斜槽上同一位置静止释放,因此高度相同;
[2]描点连线用平滑曲线连接,钢球做平抛运动的轨迹如图所示
[3]因为抛出点在坐标原点,为方便计算,在图线上找到较远的点,在图线上找到坐标为19.6cm的点为研究位置,该
点坐标为 ,根据平抛运动规律 ,解得
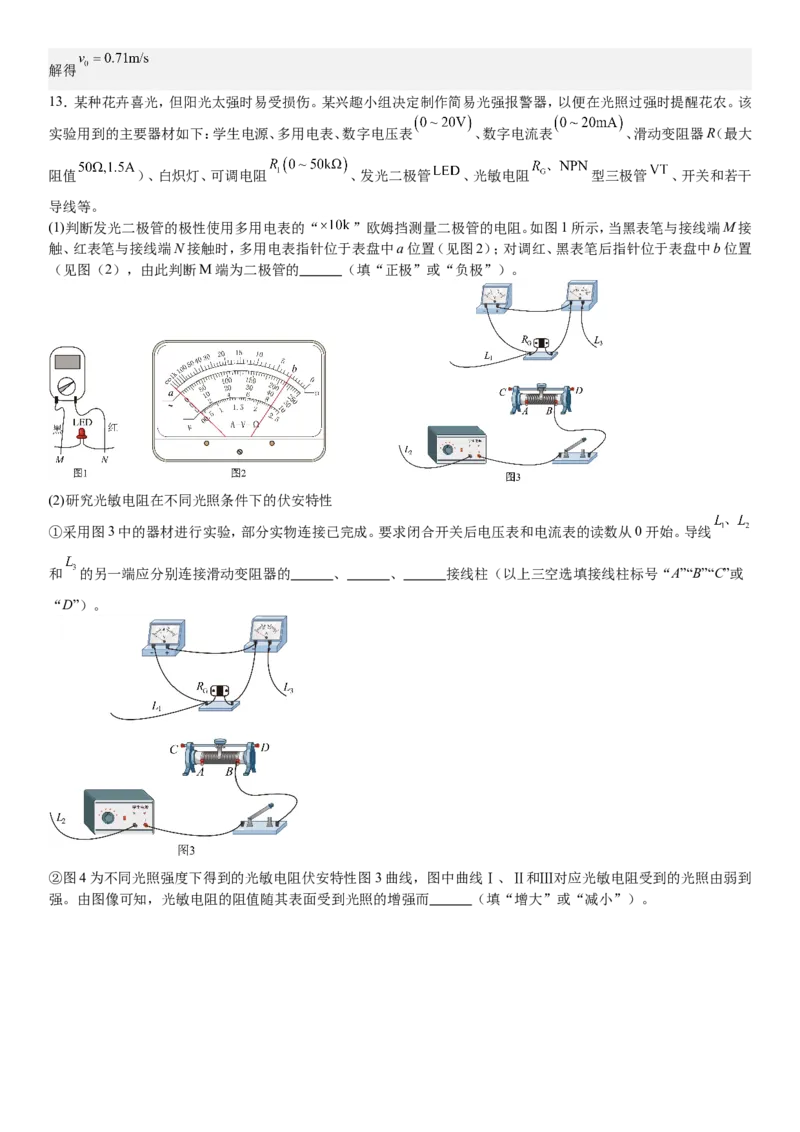
13.某种花卉喜光,但阳光太强时易受损伤。某兴趣小组决定制作简易光强报警器,以便在光照过强时提醒花农。该
实验用到的主要器材如下:学生电源、多用电表、数字电压表 、数字电流表 、滑动变阻器R(最大
阻值 )、白炽灯、可调电阻 、发光二极管 、光敏电阻 型三极管 、开关和若干
导线等。
(1)判断发光二极管的极性使用多用电表的“ ”欧姆挡测量二极管的电阻。如图1所示,当黑表笔与接线端M接
触、红表笔与接线端N接触时,多用电表指针位于表盘中a位置(见图2);对调红、黑表笔后指针位于表盘中b位置
(见图(2),由此判断M端为二极管的 (填“正极”或“负极”)。
(2)研究光敏电阻在不同光照条件下的伏安特性
①采用图3中的器材进行实验,部分实物连接已完成。要求闭合开关后电压表和电流表的读数从0开始。导线
和 的另一端应分别连接滑动变阻器的 、 、 接线柱(以上三空选填接线柱标号“A”“B”“C”或
“D”)。
②图4为不同光照强度下得到的光敏电阻伏安特性图3曲线,图中曲线Ⅰ、Ⅱ和Ⅲ对应光敏电阻受到的光照由弱到
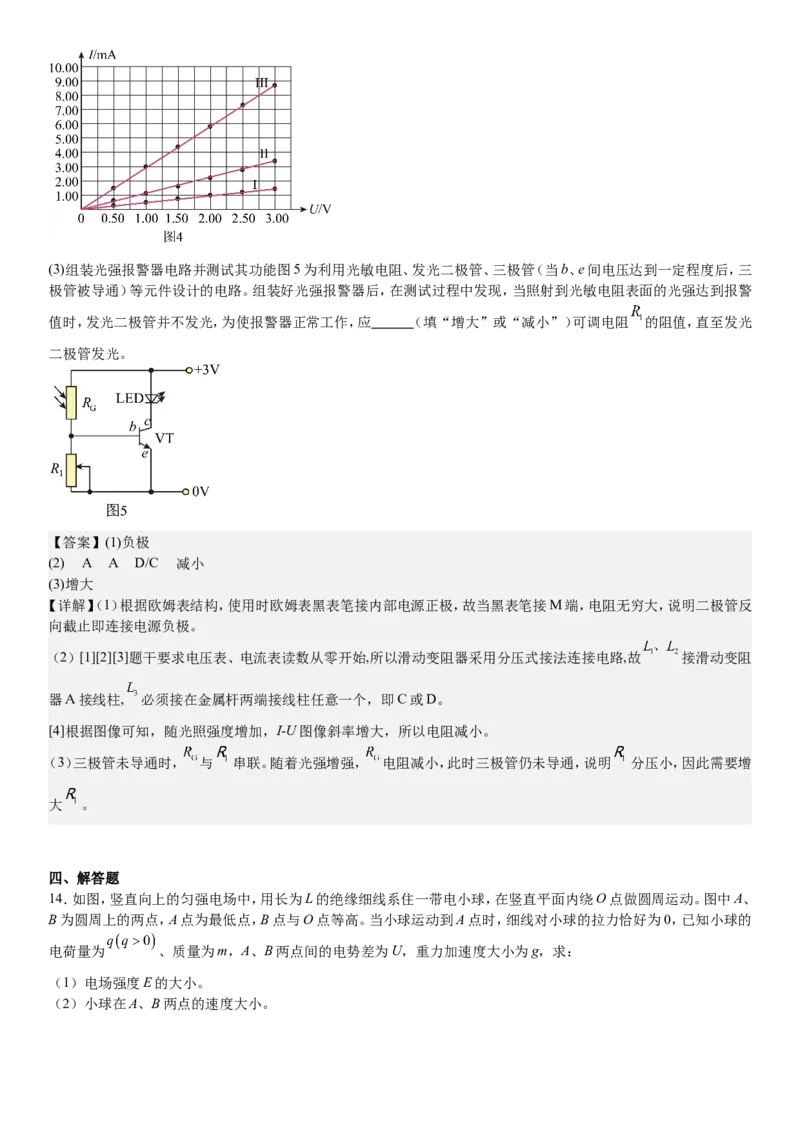
强。由图像可知,光敏电阻的阻值随其表面受到光照的增强而 (填“增大”或“减小”)。(3)组装光强报警器电路并测试其功能图5为利用光敏电阻、发光二极管、三极管(当b、e间电压达到一定程度后,三
极管被导通)等元件设计的电路。组装好光强报警器后,在测试过程中发现,当照射到光敏电阻表面的光强达到报警
值时,发光二极管并不发光,为使报警器正常工作,应 ( 填“增大”或“减小”)可调电阻 的阻值,直至发光
二极管发光。
【答案】(1)负极
(2) A A D/C 减小
(3)增大
【详解】(1)根据欧姆表结构,使用时欧姆表黑表笔接内部电源正极,故当黑表笔接M端,电阻无穷大,说明二极管反
向截止即连接电源负极。
(2)[1][2][3]题干要求电压表、电流表读数从零开始,所以滑动变阻器采用分压式接法连接电路,故 接滑动变阻
器A接线柱, 必须接在金属杆两端接线柱任意一个,即C或D。
[4]根据图像可知,随光照强度增加,I-U图像斜率增大,所以电阻减小。
(3)三极管未导通时, 与 串联。随着光强增强, 电阻减小,此时三极管仍未导通,说明 分压小,因此需要增
大 。
四、解答题
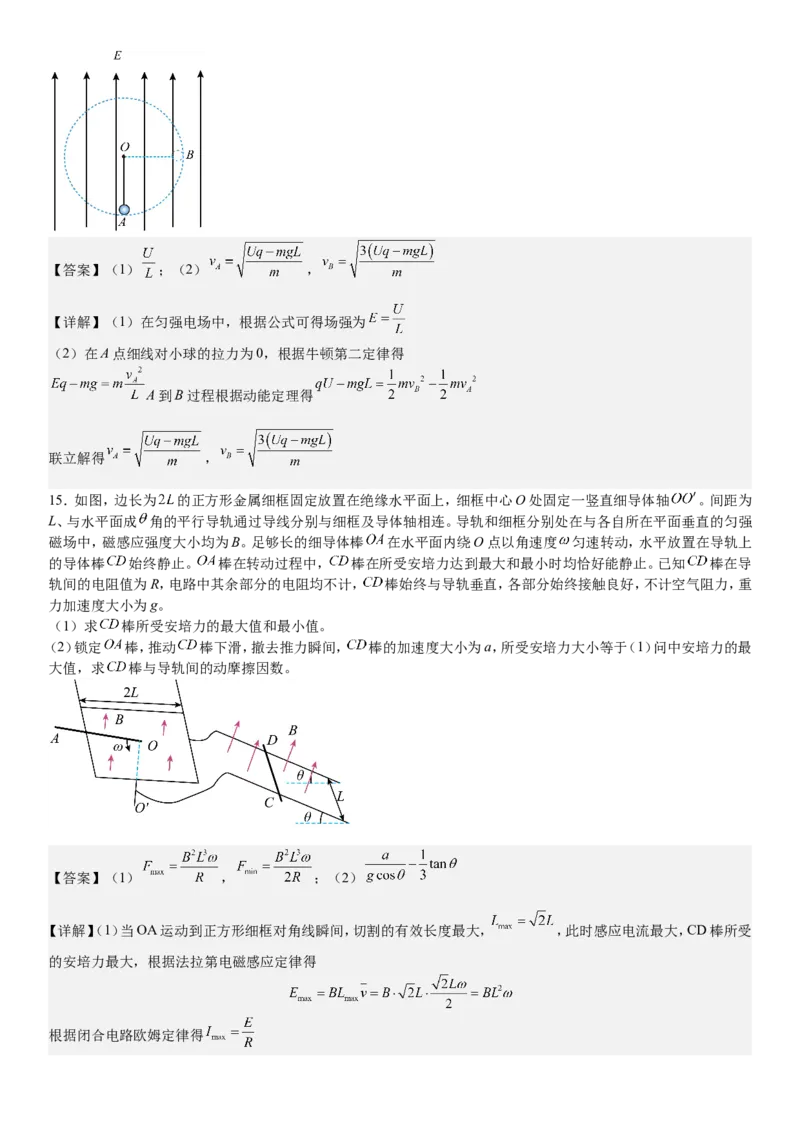
14.如图,竖直向上的匀强电场中,用长为L的绝缘细线系住一带电小球,在竖直平面内绕O点做圆周运动。图中A、
B为圆周上的两点,A点为最低点,B点与O点等高。当小球运动到A点时,细线对小球的拉力恰好为0,已知小球的
电荷量为 、质量为m,A、B两点间的电势差为U,重力加速度大小为g,求:
(1)电场强度E的大小。
(2)小球在A、B两点的速度大小。【答案】(1) ;(2) ,
【详解】(1)在匀强电场中,根据公式可得场强为
(2)在A点细线对小球的拉力为0,根据牛顿第二定律得
A到B过程根据动能定理得
联立解得 ,
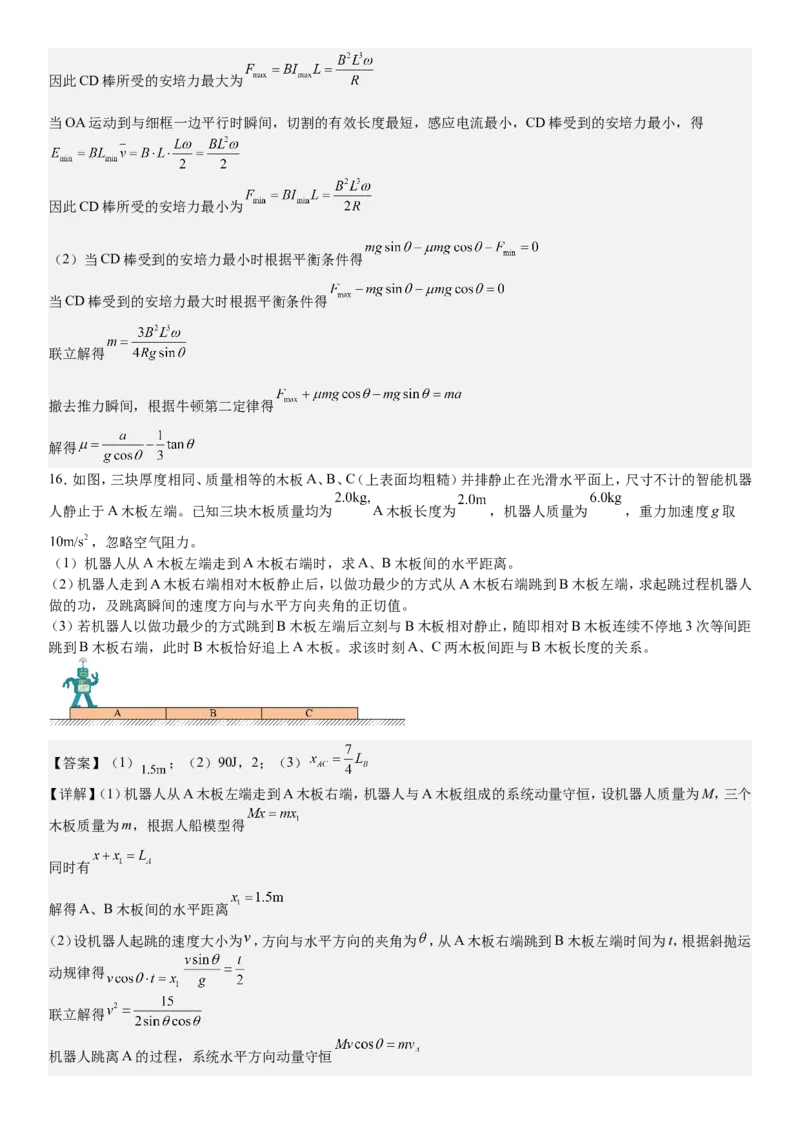
15.如图,边长为 的正方形金属细框固定放置在绝缘水平面上,细框中心O处固定一竖直细导体轴 。间距为
L、与水平面成 角的平行导轨通过导线分别与细框及导体轴相连。导轨和细框分别处在与各自所在平面垂直的匀强
磁场中,磁感应强度大小均为B。足够长的细导体棒 在水平面内绕O点以角速度 匀速转动,水平放置在导轨上
的导体棒 始终静止。 棒在转动过程中, 棒在所受安培力达到最大和最小时均恰好能静止。已知 棒在导
轨间的电阻值为R,电路中其余部分的电阻均不计, 棒始终与导轨垂直,各部分始终接触良好,不计空气阻力,重
力加速度大小为g。
(1)求 棒所受安培力的最大值和最小值。
(2)锁定 棒,推动 棒下滑,撤去推力瞬间, 棒的加速度大小为a,所受安培力大小等于(1)问中安培力的最
大值,求 棒与导轨间的动摩擦因数。
【答案】(1) , ;(2)
【详解】(1)当OA运动到正方形细框对角线瞬间,切割的有效长度最大, ,此时感应电流最大,CD棒所受
的安培力最大,根据法拉第电磁感应定律得
根据闭合电路欧姆定律得因此CD棒所受的安培力最大为
当OA运动到与细框一边平行时瞬间,切割的有效长度最短,感应电流最小,CD棒受到的安培力最小,得
因此CD棒所受的安培力最小为
(2)当CD棒受到的安培力最小时根据平衡条件得
当CD棒受到的安培力最大时根据平衡条件得
联立解得
撤去推力瞬间,根据牛顿第二定律得
解得
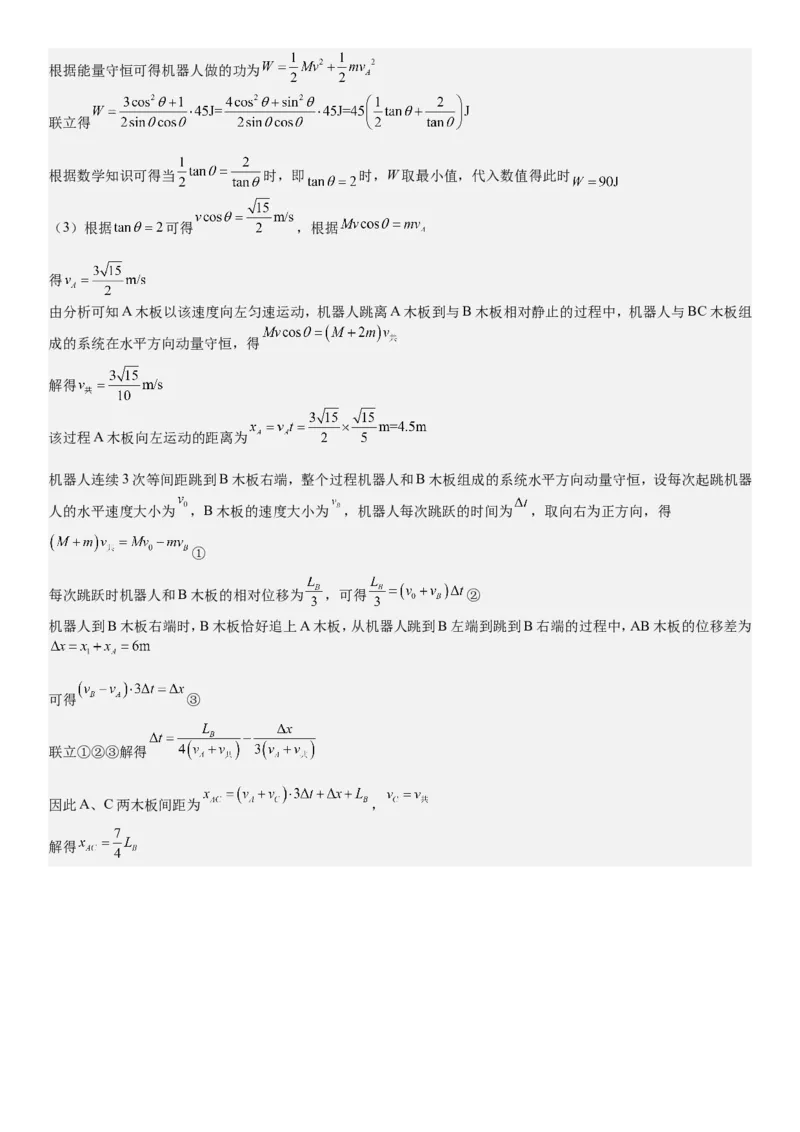
16.如图,三块厚度相同、质量相等的木板A、B、C(上表面均粗糙)并排静止在光滑水平面上,尺寸不计的智能机器
人静止于A木板左端。已知三块木板质量均为 A木板长度为 ,机器人质量为 ,重力加速度g取
,忽略空气阻力。
(1)机器人从A木板左端走到A木板右端时,求A、B木板间的水平距离。
(2)机器人走到A木板右端相对木板静止后,以做功最少的方式从A木板右端跳到B木板左端,求起跳过程机器人
做的功,及跳离瞬间的速度方向与水平方向夹角的正切值。
(3)若机器人以做功最少的方式跳到B木板左端后立刻与B木板相对静止,随即相对B木板连续不停地3次等间距
跳到B木板右端,此时B木板恰好追上A木板。求该时刻A、C两木板间距与B木板长度的关系。
【答案】(1) ;(2)90J,2;(3)
【详解】(1)机器人从A木板左端走到A木板右端,机器人与A木板组成的系统动量守恒,设机器人质量为M,三个
木板质量为m,根据人船模型得
同时有
解得A、B木板间的水平距离
(2)设机器人起跳的速度大小为 ,方向与水平方向的夹角为 ,从A木板右端跳到B木板左端时间为t,根据斜抛运
动规律得
联立解得
机器人跳离A的过程,系统水平方向动量守恒根据能量守恒可得机器人做的功为
联立得
根据数学知识可得当 时,即 时,W取最小值,代入数值得此时
(3)根据 可得 ,根据
得
由分析可知A木板以该速度向左匀速运动,机器人跳离A木板到与B木板相对静止的过程中,机器人与BC木板组
成的系统在水平方向动量守恒,得
解得
该过程A木板向左运动的距离为
机器人连续3次等间距跳到B木板右端,整个过程机器人和B木板组成的系统水平方向动量守恒,设每次起跳机器
人的水平速度大小为 ,B木板的速度大小为 ,机器人每次跳跃的时间为 ,取向右为正方向,得
①
每次跳跃时机器人和B木板的相对位移为 ,可得 ②
机器人到B木板右端时,B木板恰好追上A木板,从机器人跳到B左端到跳到B右端的过程中,AB木板的位移差为
可得 ③
联立①②③解得
因此A、C两木板间距为 ,
解得

