文档内容
实验抢分专练(七) 验证机械能守恒定律
(40分钟 40分)
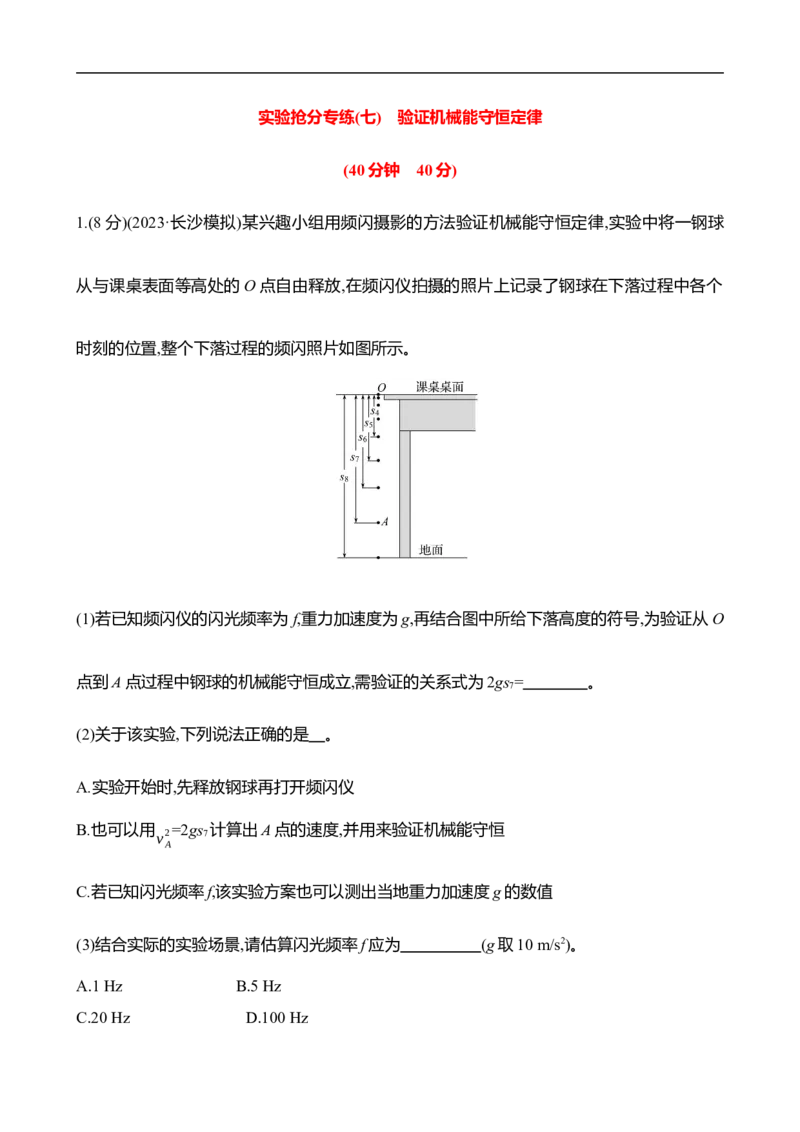
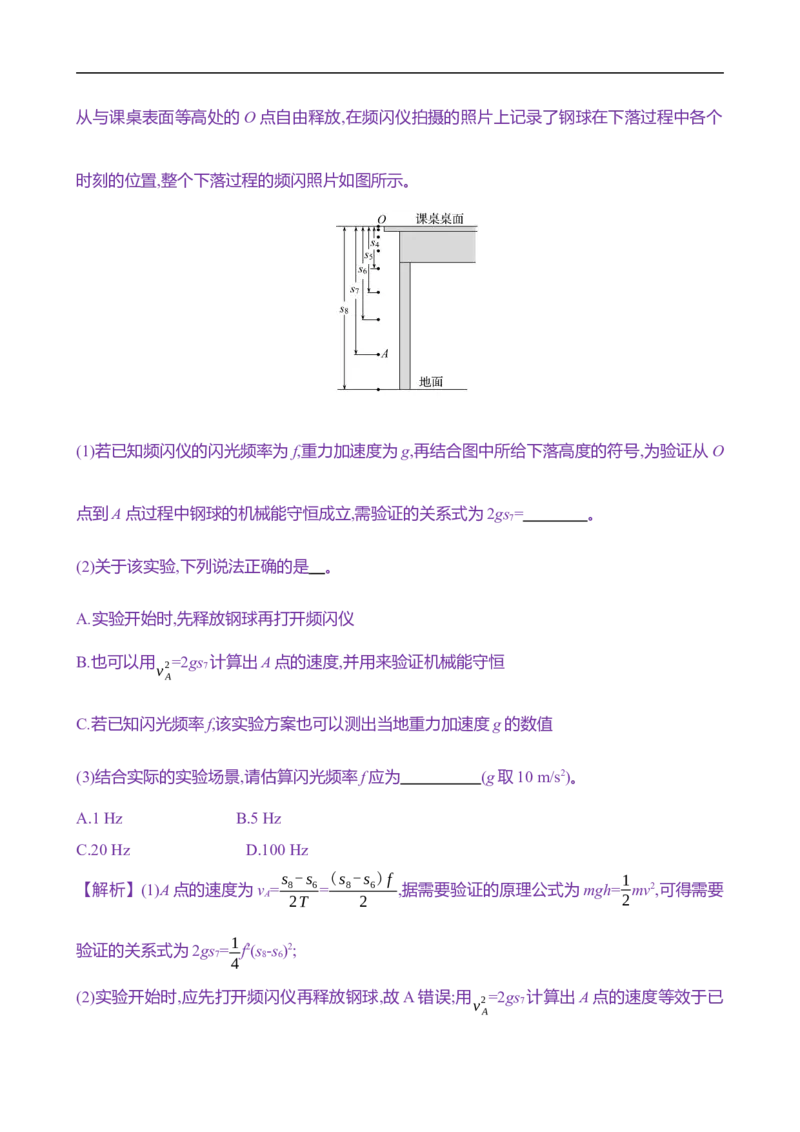
1.(8分)(2023·长沙模拟)某兴趣小组用频闪摄影的方法验证机械能守恒定律,实验中将一钢球
从与课桌表面等高处的 O点自由释放,在频闪仪拍摄的照片上记录了钢球在下落过程中各个
时刻的位置,整个下落过程的频闪照片如图所示。
(1)若已知频闪仪的闪光频率为f,重力加速度为g,再结合图中所给下落高度的符号,为验证从O
点到A点过程中钢球的机械能守恒成立,需验证的关系式为2gs = 。
7
(2)关于该实验,下列说法正确的是 。
A.实验开始时,先释放钢球再打开频闪仪
B.也可以用 =2gs 计算出A点的速度,并用来验证机械能守恒
v2 7
A
C.若已知闪光频率f,该实验方案也可以测出当地重力加速度g的数值
(3)结合实际的实验场景,请估算闪光频率f应为 (g取10 m/s2)。
A.1 Hz B.5 Hz
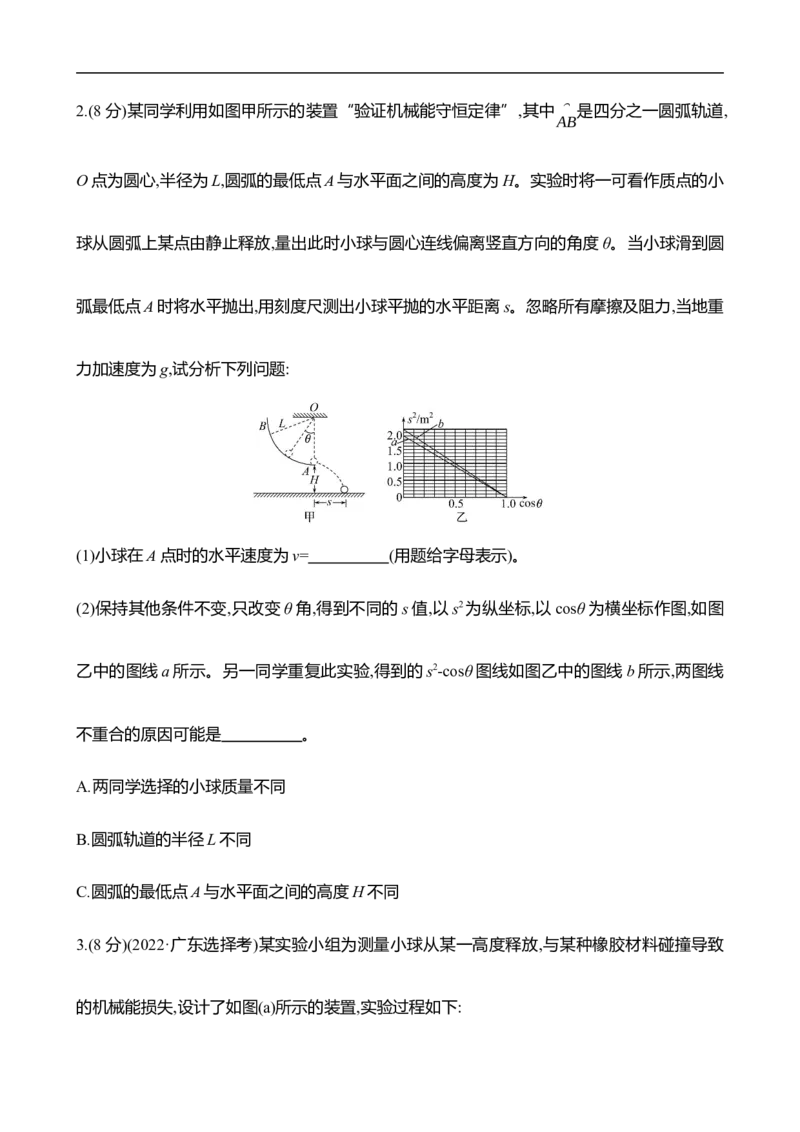
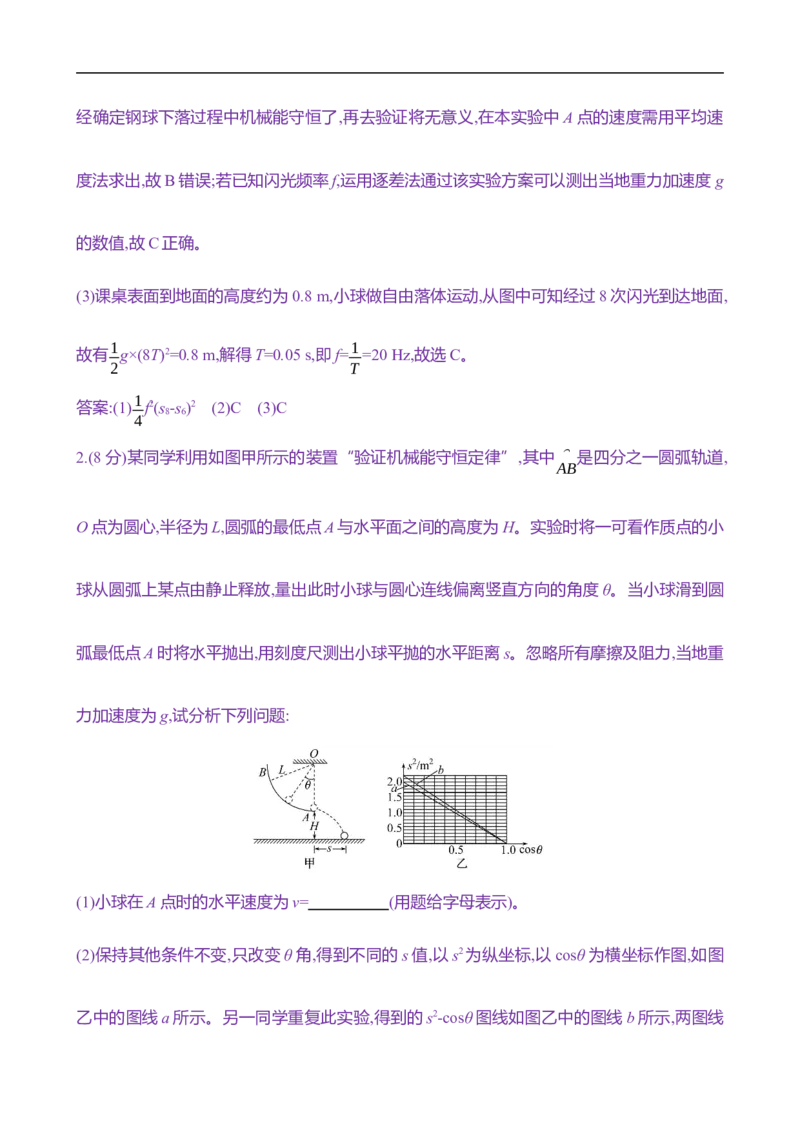
C.20 Hz D.100 Hz2.(8分)某同学利用如图甲所示的装置“验证机械能守恒定律”,其中 是四分之一圆弧轨道,
AB
⏜
O点为圆心,半径为L,圆弧的最低点A与水平面之间的高度为H。实验时将一可看作质点的小
球从圆弧上某点由静止释放,量出此时小球与圆心连线偏离竖直方向的角度 θ。当小球滑到圆
弧最低点A时将水平抛出,用刻度尺测出小球平抛的水平距离s。忽略所有摩擦及阻力,当地重
力加速度为g,试分析下列问题:
(1)小球在A点时的水平速度为v= (用题给字母表示)。
(2)保持其他条件不变,只改变θ角,得到不同的s值,以s2为纵坐标,以cosθ为横坐标作图,如图
乙中的图线a所示。另一同学重复此实验,得到的s2-cosθ图线如图乙中的图线b所示,两图线
不重合的原因可能是 。
A.两同学选择的小球质量不同
B.圆弧轨道的半径L不同
C.圆弧的最低点A与水平面之间的高度H不同
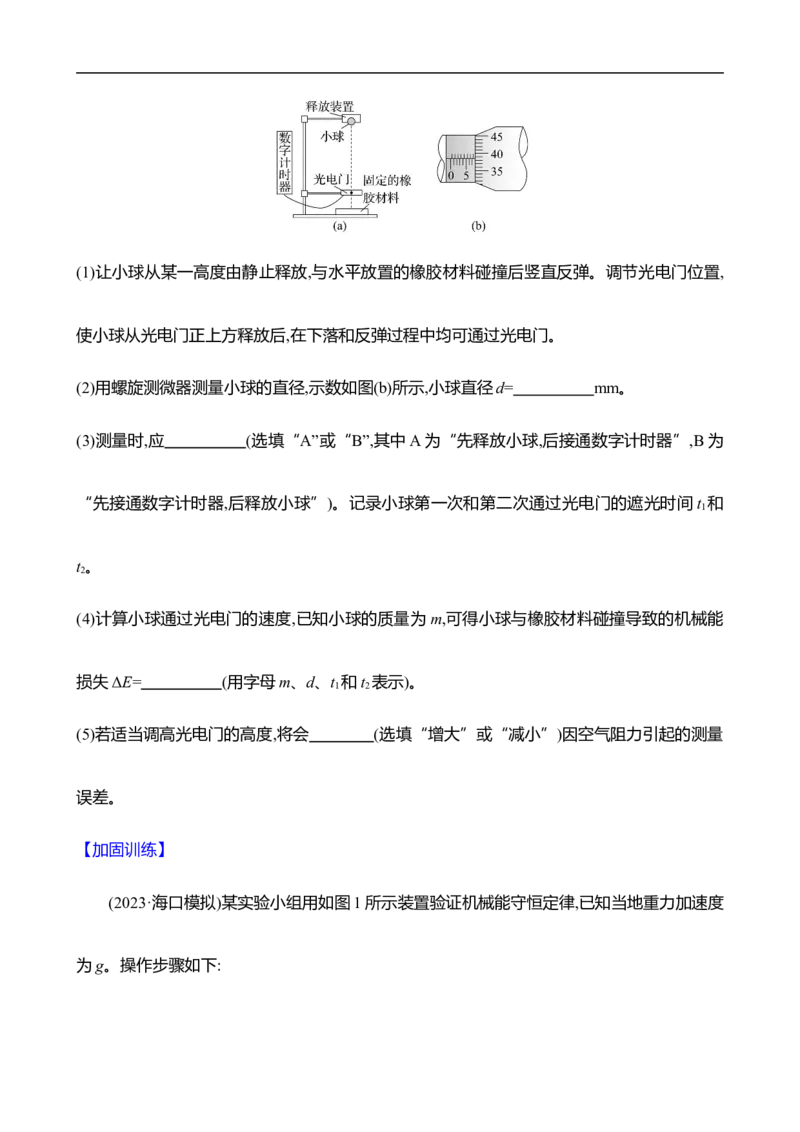
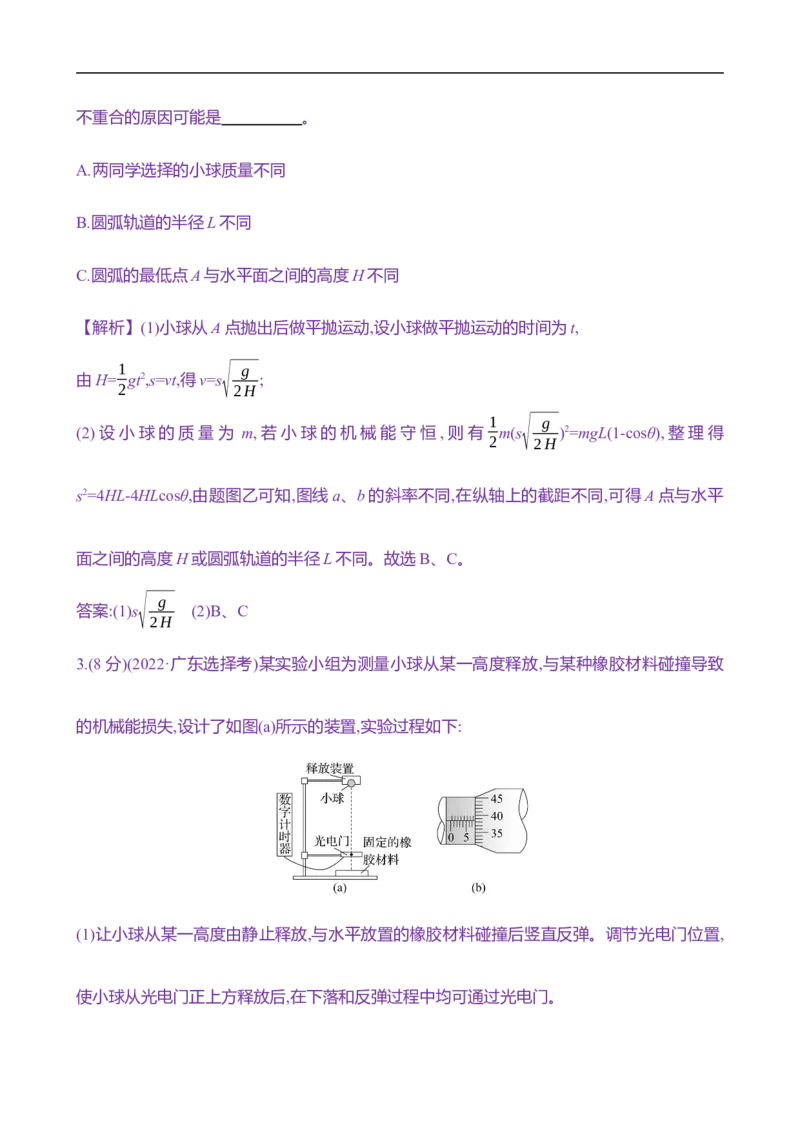
3.(8分)(2022·广东选择考)某实验小组为测量小球从某一高度释放,与某种橡胶材料碰撞导致
的机械能损失,设计了如图(a)所示的装置,实验过程如下:(1)让小球从某一高度由静止释放,与水平放置的橡胶材料碰撞后竖直反弹。调节光电门位置,
使小球从光电门正上方释放后,在下落和反弹过程中均可通过光电门。
(2)用螺旋测微器测量小球的直径,示数如图(b)所示,小球直径d= mm。
(3)测量时,应 (选填“A”或“B”,其中A为“先释放小球,后接通数字计时器”,B为
“先接通数字计时器,后释放小球”)。记录小球第一次和第二次通过光电门的遮光时间 t 和
1
t 。
2
(4)计算小球通过光电门的速度,已知小球的质量为m,可得小球与橡胶材料碰撞导致的机械能
损失ΔE= (用字母m、d、t 和t 表示)。
1 2
(5)若适当调高光电门的高度,将会 (选填“增大”或“减小”)因空气阻力引起的测量
误差。
【加固训练】
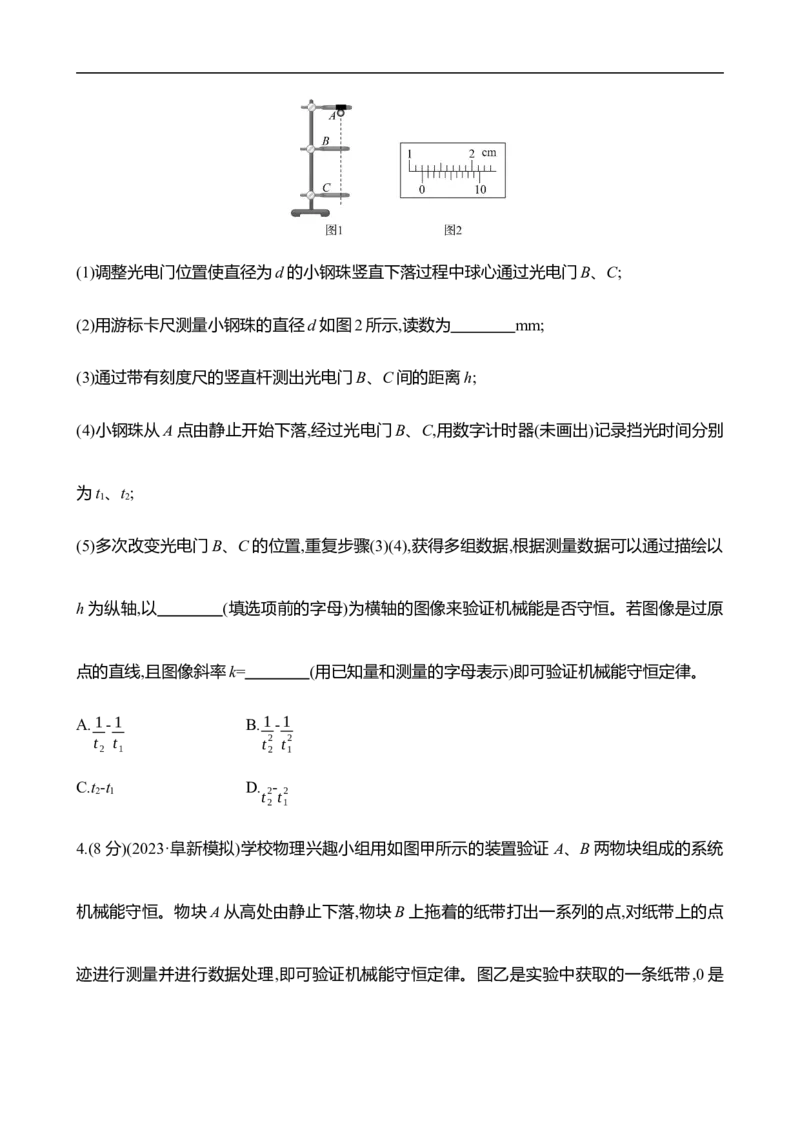
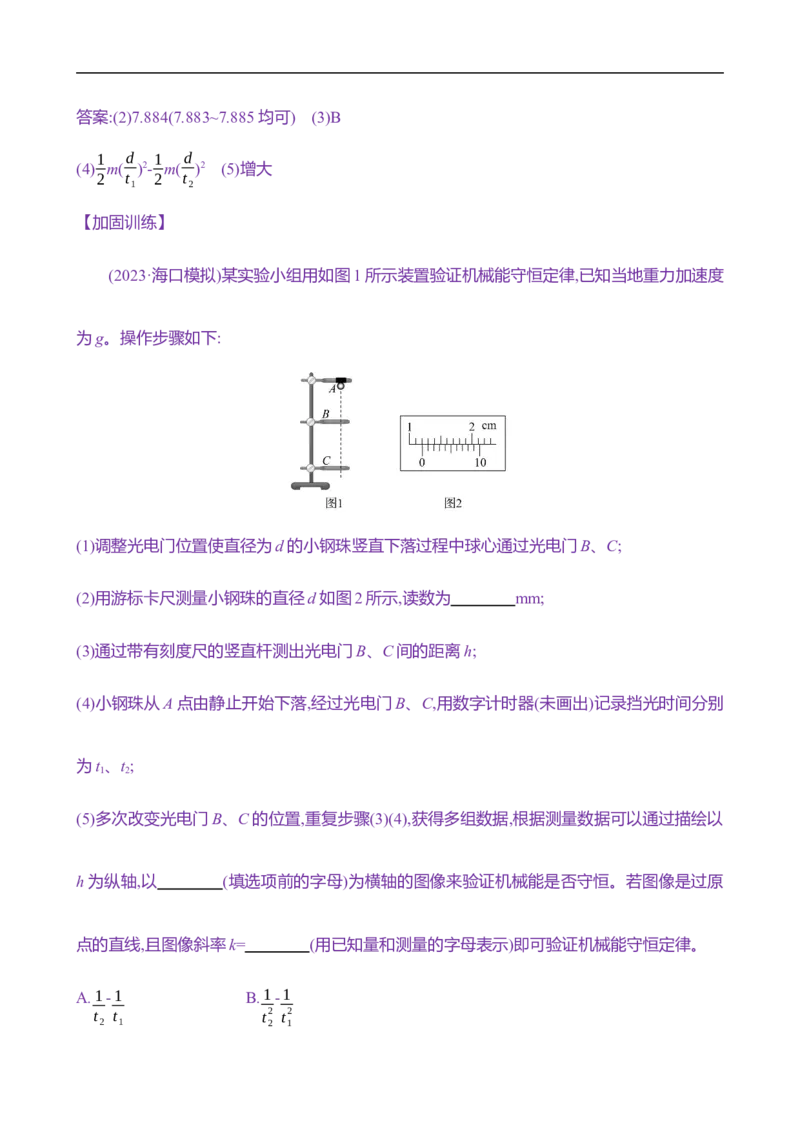
(2023·海口模拟)某实验小组用如图1所示装置验证机械能守恒定律,已知当地重力加速度
为g。操作步骤如下:(1)调整光电门位置使直径为d的小钢珠竖直下落过程中球心通过光电门B、C;
(2)用游标卡尺测量小钢珠的直径d如图2所示,读数为 mm;
(3)通过带有刻度尺的竖直杆测出光电门B、C间的距离h;
(4)小钢珠从A点由静止开始下落,经过光电门B、C,用数字计时器(未画出)记录挡光时间分别
为t 、t ;
1 2
(5)多次改变光电门B、C的位置,重复步骤(3)(4),获得多组数据,根据测量数据可以通过描绘以
h为纵轴,以 (填选项前的字母)为横轴的图像来验证机械能是否守恒。若图像是过原
点的直线,且图像斜率k= (用已知量和测量的字母表示)即可验证机械能守恒定律。
A.1-1 B.1-1
t t t2 t2
2 1 2 1
C.t -t D. -
2 1 t2 t2
2 1
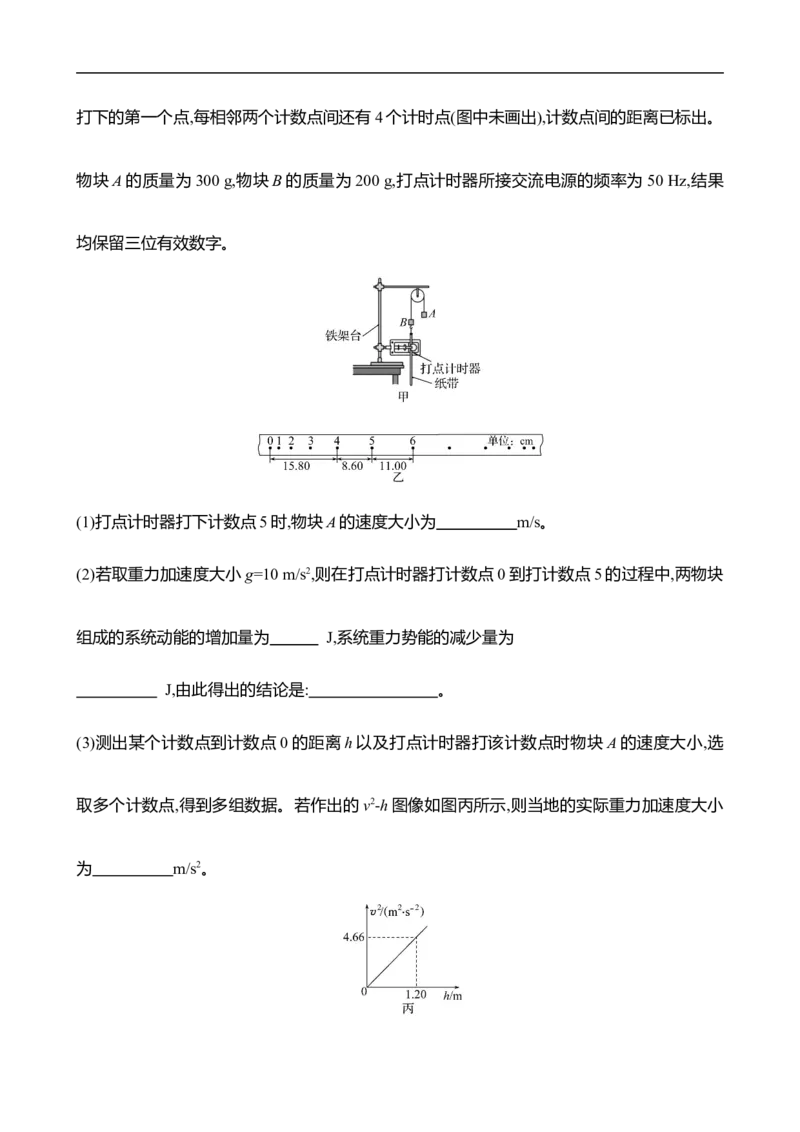
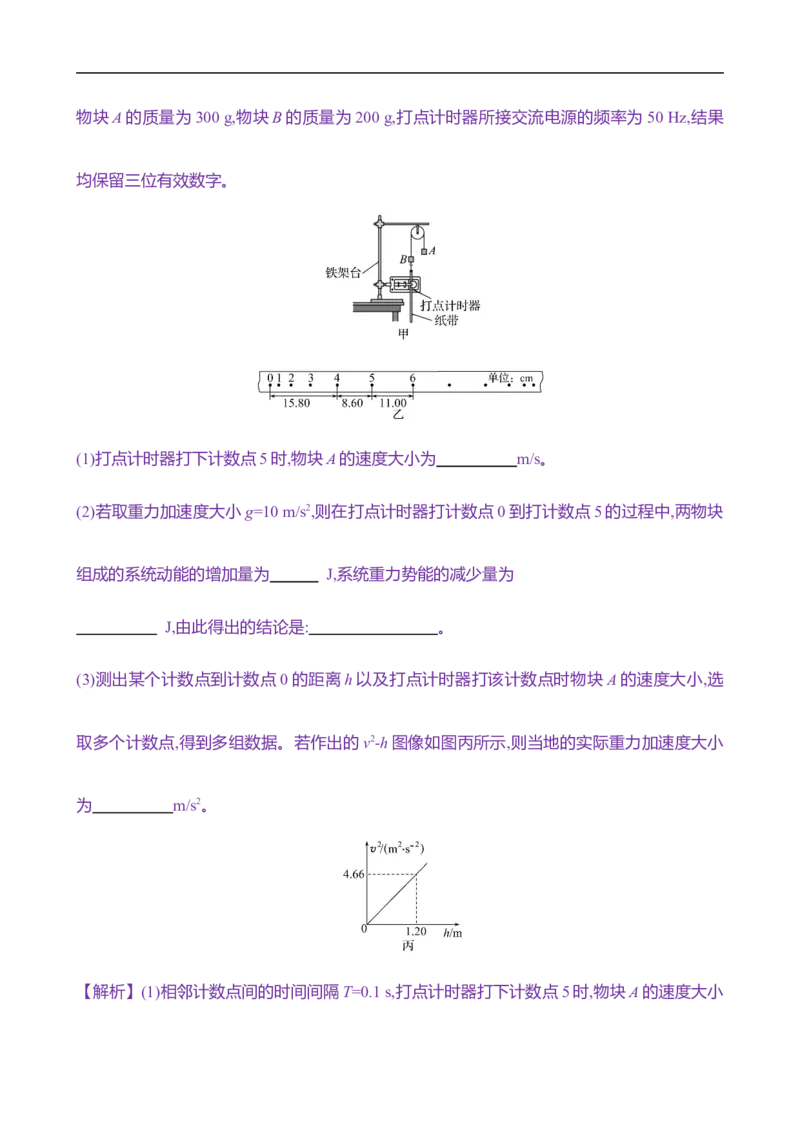
4.(8分)(2023·阜新模拟)学校物理兴趣小组用如图甲所示的装置验证 A、B两物块组成的系统
机械能守恒。物块A从高处由静止下落,物块B上拖着的纸带打出一系列的点,对纸带上的点
迹进行测量并进行数据处理,即可验证机械能守恒定律。图乙是实验中获取的一条纸带,0是打下的第一个点,每相邻两个计数点间还有4个计时点(图中未画出),计数点间的距离已标出。
物块A的质量为300 g,物块B的质量为200 g,打点计时器所接交流电源的频率为 50 Hz,结果
均保留三位有效数字。
(1)打点计时器打下计数点5时,物块A的速度大小为 m/s。
(2)若取重力加速度大小 g=10 m/s2,则在打点计时器打计数点 0到打计数点5的过程中,两物块
组成的系统动能的增加量为 J,系统重力势能的减少量为
J,由此得出的结论是: 。
(3)测出某个计数点到计数点 0的距离h以及打点计时器打该计数点时物块 A的速度大小,选
取多个计数点,得到多组数据。若作出的v2-h图像如图丙所示,则当地的实际重力加速度大小
为 m/s2。【加固训练】
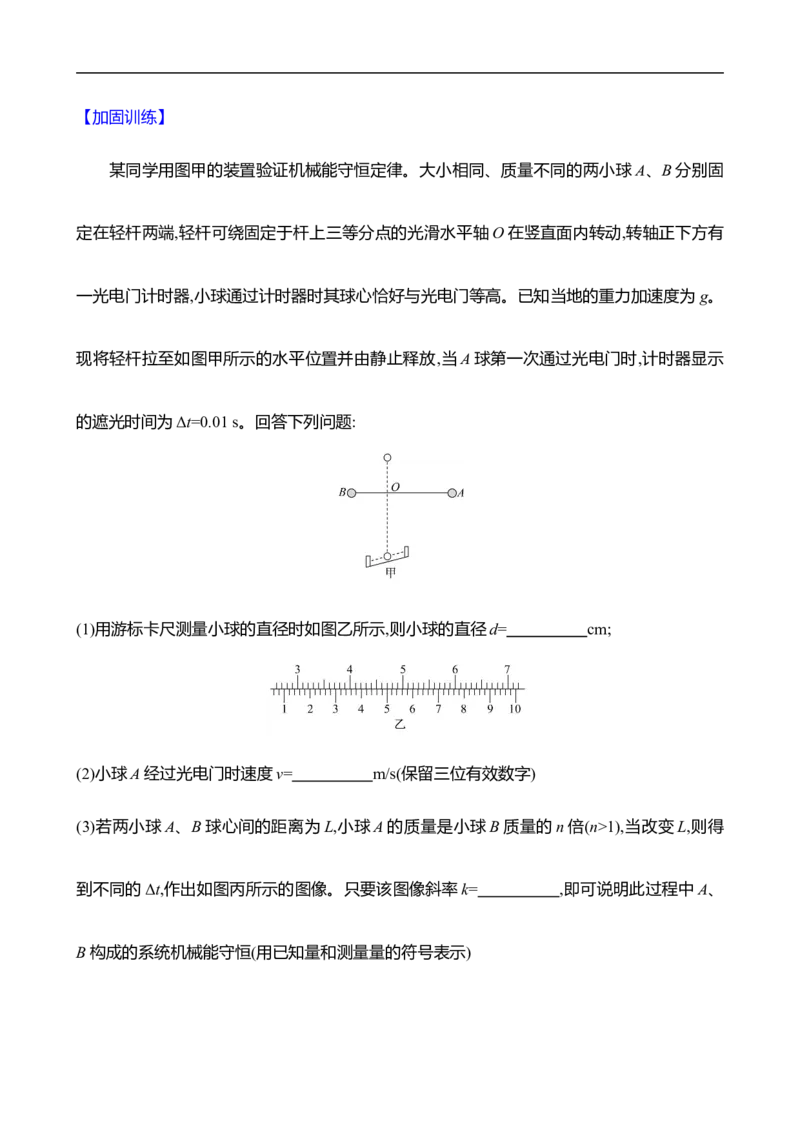
某同学用图甲的装置验证机械能守恒定律。大小相同、质量不同的两小球 A、B分别固
定在轻杆两端,轻杆可绕固定于杆上三等分点的光滑水平轴O在竖直面内转动,转轴正下方有
一光电门计时器,小球通过计时器时其球心恰好与光电门等高。已知当地的重力加速度为 g。
现将轻杆拉至如图甲所示的水平位置并由静止释放,当A球第一次通过光电门时,计时器显示
的遮光时间为Δt=0.01 s。回答下列问题:
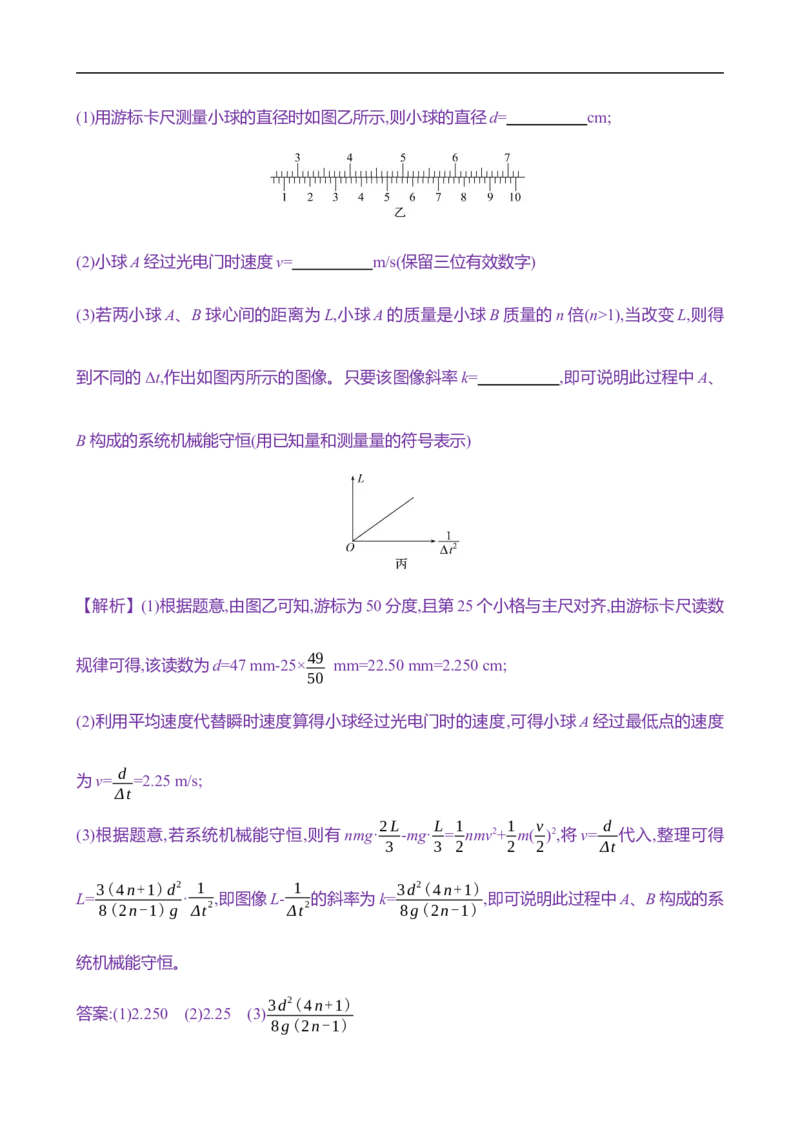
(1)用游标卡尺测量小球的直径时如图乙所示,则小球的直径d= cm;
(2)小球A经过光电门时速度v= m/s(保留三位有效数字)
(3)若两小球A、B球心间的距离为L,小球A的质量是小球B质量的n倍(n>1),当改变L,则得
到不同的Δt,作出如图丙所示的图像。只要该图像斜率k= ,即可说明此过程中A、
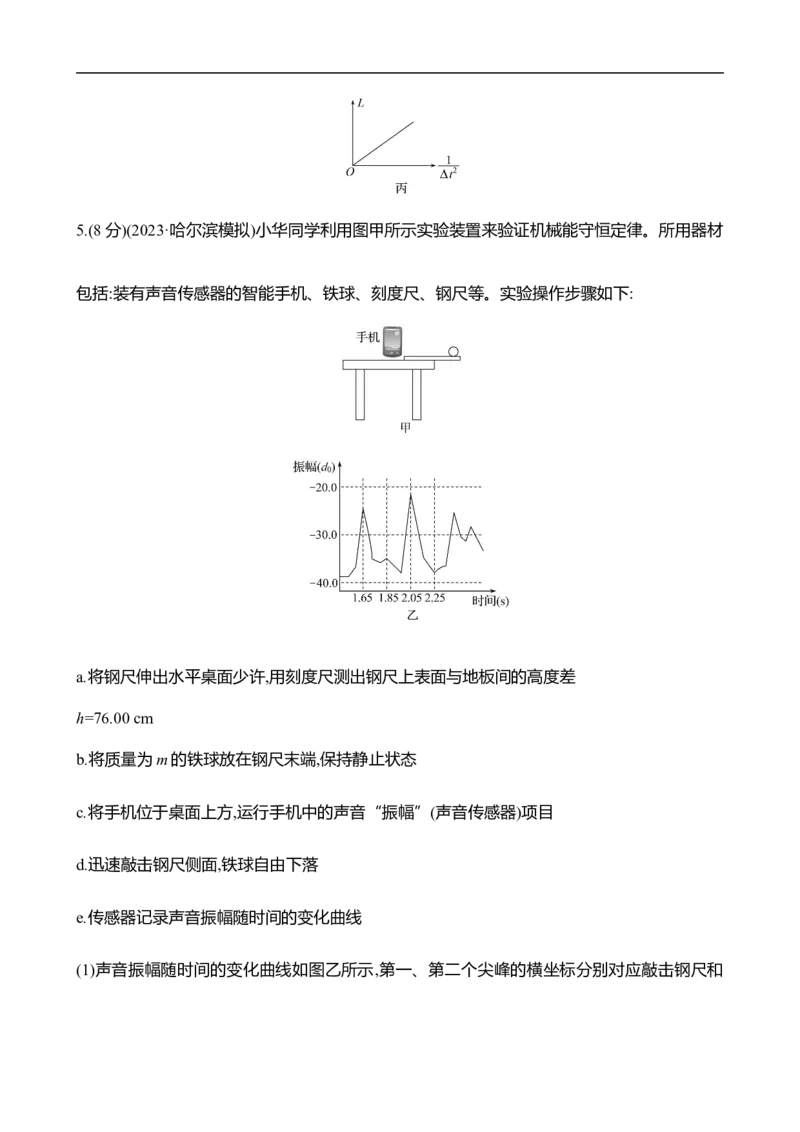
B构成的系统机械能守恒(用已知量和测量量的符号表示)5.(8分)(2023·哈尔滨模拟)小华同学利用图甲所示实验装置来验证机械能守恒定律。所用器材
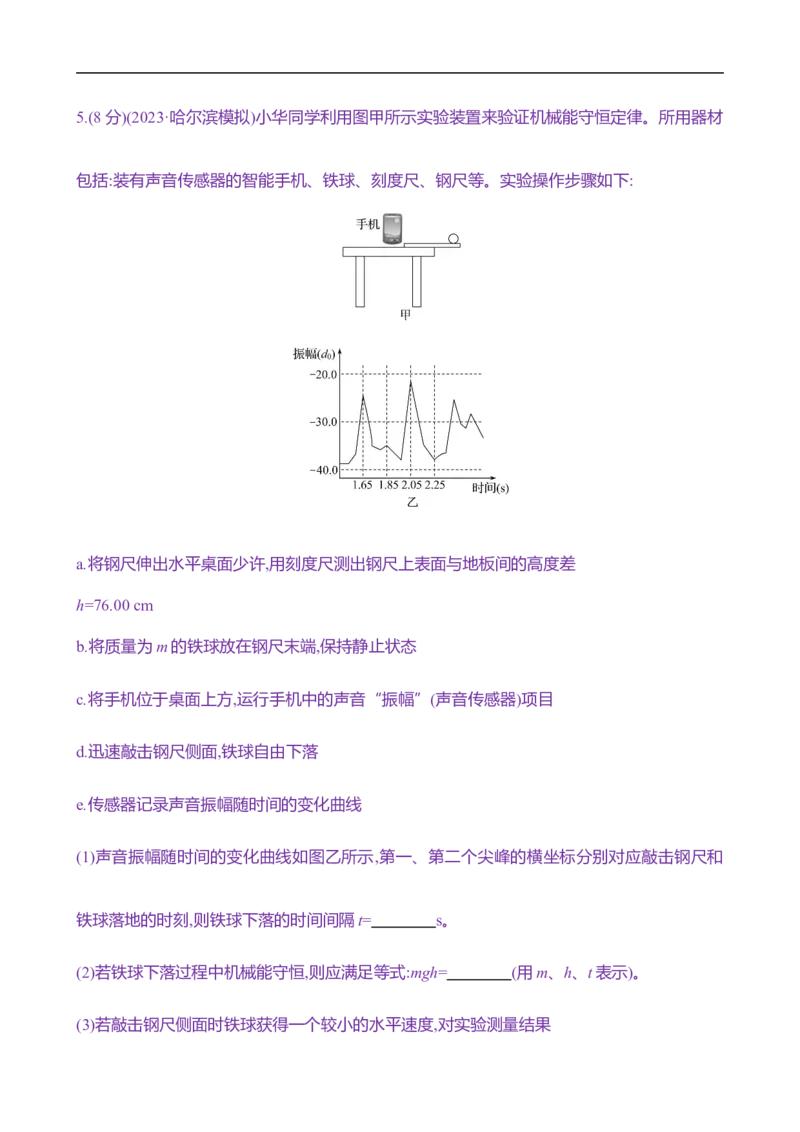
包括:装有声音传感器的智能手机、铁球、刻度尺、钢尺等。实验操作步骤如下:
a.将钢尺伸出水平桌面少许,用刻度尺测出钢尺上表面与地板间的高度差
h=76.00 cm
b.将质量为m的铁球放在钢尺末端,保持静止状态
c.将手机位于桌面上方,运行手机中的声音“振幅”(声音传感器)项目
d.迅速敲击钢尺侧面,铁球自由下落
e.传感器记录声音振幅随时间的变化曲线
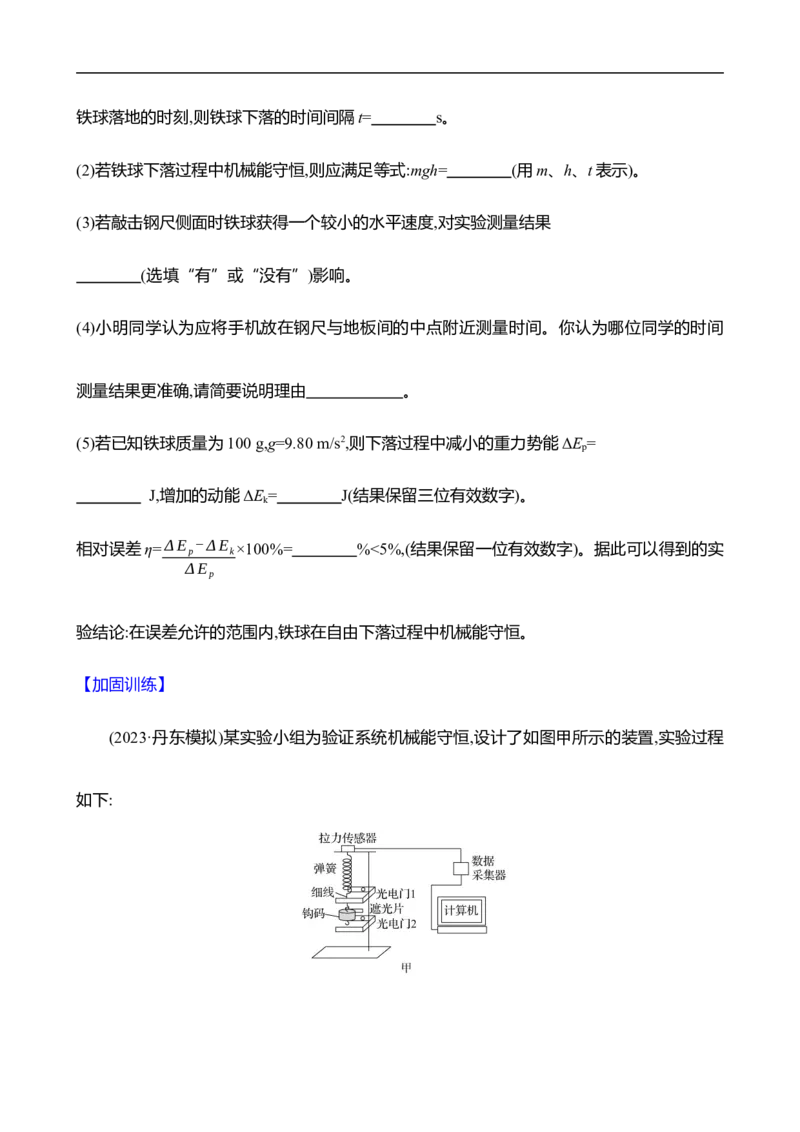
(1)声音振幅随时间的变化曲线如图乙所示,第一、第二个尖峰的横坐标分别对应敲击钢尺和铁球落地的时刻,则铁球下落的时间间隔t= s。
(2)若铁球下落过程中机械能守恒,则应满足等式:mgh= (用m、h、t表示)。
(3)若敲击钢尺侧面时铁球获得一个较小的水平速度,对实验测量结果
(选填“有”或“没有”)影响。
(4)小明同学认为应将手机放在钢尺与地板间的中点附近测量时间。你认为哪位同学的时间
测量结果更准确,请简要说明理由 。
(5)若已知铁球质量为100 g,g=9.80 m/s2,则下落过程中减小的重力势能ΔE =
p
J,增加的动能ΔE = J(结果保留三位有效数字)。
k
相对误差η=ΔE -ΔE ×100%= %<5%,(结果保留一位有效数字)。据此可以得到的实
p k
ΔE
p
验结论:在误差允许的范围内,铁球在自由下落过程中机械能守恒。
【加固训练】
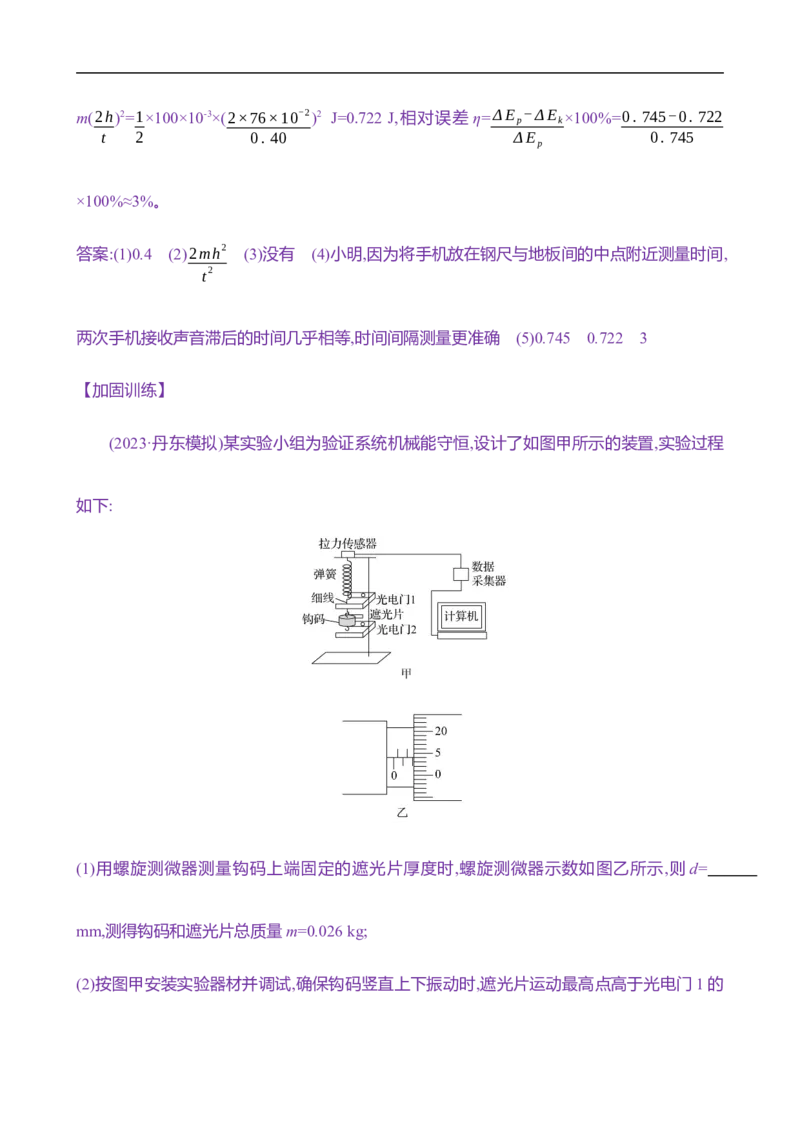
(2023·丹东模拟)某实验小组为验证系统机械能守恒,设计了如图甲所示的装置,实验过程
如下:(1)用螺旋测微器测量钩码上端固定的遮光片厚度时,螺旋测微器示数如图乙所示,则 d=
mm,测得钩码和遮光片总质量m=0.026 kg;
(2)按图甲安装实验器材并调试,确保钩码竖直上下振动时,遮光片运动最高点高于光电门1的
激光孔,运动最低点低于光电门2的激光孔;
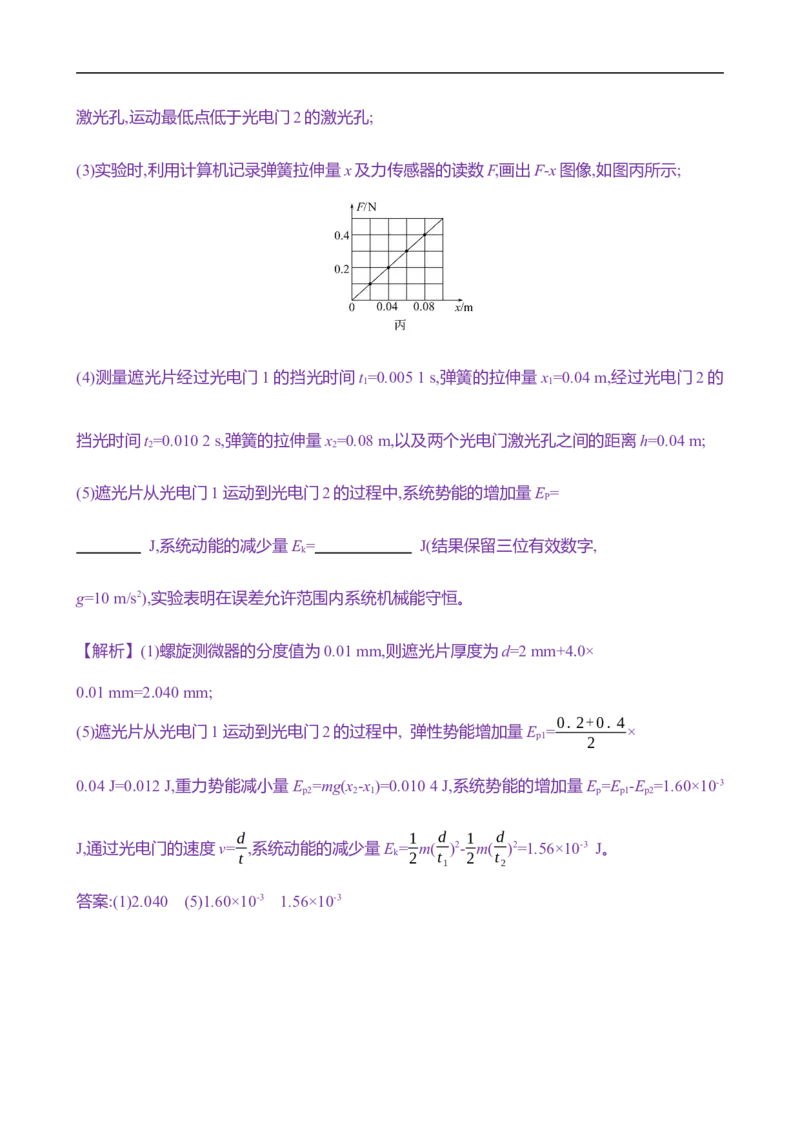
(3)实验时,利用计算机记录弹簧拉伸量x及力传感器的读数F,画出F-x图像,如图丙所示;
(4)测量遮光片经过光电门1的挡光时间t =0.005 1 s,弹簧的拉伸量x =0.04 m,经过光电门2的
1 1
挡光时间t =0.010 2 s,弹簧的拉伸量x =0.08 m,以及两个光电门激光孔之间的距离h=0.04 m;
2 2
(5)遮光片从光电门1运动到光电门2的过程中,系统势能的增加量E =
P
J,系统动能的减少量E = J(结果保留三位有效数字,
k
g=10 m/s2),实验表明在误差允许范围内系统机械能守恒。
解析版
1.(8分)(2023·长沙模拟)某兴趣小组用频闪摄影的方法验证机械能守恒定律,实验中将一钢球从与课桌表面等高处的 O点自由释放,在频闪仪拍摄的照片上记录了钢球在下落过程中各个
时刻的位置,整个下落过程的频闪照片如图所示。
(1)若已知频闪仪的闪光频率为f,重力加速度为g,再结合图中所给下落高度的符号,为验证从O
点到A点过程中钢球的机械能守恒成立,需验证的关系式为2gs = 。
7
(2)关于该实验,下列说法正确的是 。
A.实验开始时,先释放钢球再打开频闪仪
B.也可以用 =2gs 计算出A点的速度,并用来验证机械能守恒
v2 7
A
C.若已知闪光频率f,该实验方案也可以测出当地重力加速度g的数值
(3)结合实际的实验场景,请估算闪光频率f应为 (g取10 m/s2)。
A.1 Hz B.5 Hz
C.20 Hz D.100 Hz
s -s (s -s )f 1
【解析】(1)A点的速度为v = 8 6= 8 6 ,据需要验证的原理公式为mgh= mv2,可得需要
A 2T 2 2
1
验证的关系式为2gs = f2(s -s )2;
7 8 6
4
(2)实验开始时,应先打开频闪仪再释放钢球,故A错误;用 =2gs 计算出A点的速度等效于已
v2 7
A经确定钢球下落过程中机械能守恒了,再去验证将无意义,在本实验中A点的速度需用平均速
度法求出,故B错误;若已知闪光频率f,运用逐差法通过该实验方案可以测出当地重力加速度 g
的数值,故C正确。
(3)课桌表面到地面的高度约为0.8 m,小球做自由落体运动,从图中可知经过8次闪光到达地面,
1 1
故有 g×(8T)2=0.8 m,解得T=0.05 s,即f= =20 Hz,故选C。
2 T
1
答案:(1) f2(s -s )2 (2)C (3)C
8 6
4
2.(8分)某同学利用如图甲所示的装置“验证机械能守恒定律”,其中 是四分之一圆弧轨道,
AB
⏜
O点为圆心,半径为L,圆弧的最低点A与水平面之间的高度为H。实验时将一可看作质点的小
球从圆弧上某点由静止释放,量出此时小球与圆心连线偏离竖直方向的角度 θ。当小球滑到圆
弧最低点A时将水平抛出,用刻度尺测出小球平抛的水平距离s。忽略所有摩擦及阻力,当地重
力加速度为g,试分析下列问题:
(1)小球在A点时的水平速度为v= (用题给字母表示)。
(2)保持其他条件不变,只改变θ角,得到不同的s值,以s2为纵坐标,以cosθ为横坐标作图,如图
乙中的图线a所示。另一同学重复此实验,得到的s2-cosθ图线如图乙中的图线b所示,两图线不重合的原因可能是 。
A.两同学选择的小球质量不同
B.圆弧轨道的半径L不同
C.圆弧的最低点A与水平面之间的高度H不同
【解析】(1)小球从A点抛出后做平抛运动,设小球做平抛运动的时间为t,
1 √ g
由H= gt2,s=vt,得v=s ;
2 2H
1 √ g
(2)设小球的质量为 m,若小球的机械能守恒,则有 m(s )2=mgL(1-cosθ),整理得
2 2H
s2=4HL-4HLcosθ,由题图乙可知,图线a、b的斜率不同,在纵轴上的截距不同,可得A点与水平
面之间的高度H或圆弧轨道的半径L不同。故选B、C。
√ g
答案:(1)s (2)B、C
2H
3.(8分)(2022·广东选择考)某实验小组为测量小球从某一高度释放,与某种橡胶材料碰撞导致
的机械能损失,设计了如图(a)所示的装置,实验过程如下:
(1)让小球从某一高度由静止释放,与水平放置的橡胶材料碰撞后竖直反弹。调节光电门位置,
使小球从光电门正上方释放后,在下落和反弹过程中均可通过光电门。(2)用螺旋测微器测量小球的直径,示数如图(b)所示,小球直径d= mm。
(3)测量时,应 (选填“A”或“B”,其中A为“先释放小球,后接通数字计时器”,B为
“先接通数字计时器,后释放小球”)。记录小球第一次和第二次通过光电门的遮光时间 t 和
1
t 。
2
(4)计算小球通过光电门的速度,已知小球的质量为m,可得小球与橡胶材料碰撞导致的机械能
损失ΔE= (用字母m、d、t 和t 表示)。
1 2
(5)若适当调高光电门的高度,将会 (选填“增大”或“减小”)因空气阻力引起的测量
误差。
【解析】(2)依题意,小球的直径为 d=7.5 mm+38.4×0.01 mm=7.884 mm,考虑到偶然误
差,7.883~7.885 mm均可。
(3)在测量时,因小球下落时间很短,如果先释放小球,有可能会出现时间记录不完整,所以应先
接通数字计时器,再释放小球,故选B。
d d
(4)依题意,小球向下、向上先后通过光电门时的速度分别为 v 、v ,则有v = ,v = ,则小球与
1 2 1 t 2 t
1 2
1 1 1 d 1 d
橡胶材料碰撞过程中机械能的损失量为ΔE= mv2- mv2= m( )2- m( )2。
2 1 2 2 2 t 2 t
1 2
(5)若调高光电门的高度,较调整之前小球会经历较大的空中距离,所以将会增大因空气阻力引
起的测量误差。答案:(2)7.884(7.883~7.885均可) (3)B
1 d 1 d
(4) m( )2- m( )2 (5)增大
2 t 2 t
1 2
【加固训练】
(2023·海口模拟)某实验小组用如图1所示装置验证机械能守恒定律,已知当地重力加速度
为g。操作步骤如下:
(1)调整光电门位置使直径为d的小钢珠竖直下落过程中球心通过光电门B、C;
(2)用游标卡尺测量小钢珠的直径d如图2所示,读数为 mm;
(3)通过带有刻度尺的竖直杆测出光电门B、C间的距离h;
(4)小钢珠从A点由静止开始下落,经过光电门B、C,用数字计时器(未画出)记录挡光时间分别
为t 、t ;
1 2
(5)多次改变光电门B、C的位置,重复步骤(3)(4),获得多组数据,根据测量数据可以通过描绘以
h为纵轴,以 (填选项前的字母)为横轴的图像来验证机械能是否守恒。若图像是过原
点的直线,且图像斜率k= (用已知量和测量的字母表示)即可验证机械能守恒定律。
A.1-1 B.1-1
t t t2 t2
2 1 2 1C.t -t D. -
2 1 t2 t2
2 1
【解析】(2)游标卡尺的分度值为 0.1 mm,主尺读数为12 mm,游标尺的读数为1×0.1 mm,则小
钢珠的直径为d=12 mm+1×0.1 mm=12.1 mm;
(5)小钢珠通过光电门的时间极短,可用平均速度替代瞬时速度,则小钢珠通过B、C位置的光
d d 1 1 1
电门的速度分别为v = ,v = ,则小钢珠通过B、C位置动能的增加量为ΔE = mv2- mv2=
B t C t k 2 C 2 B 2
1 2
m(d2 -d2
),小钢珠通过B、C位置重力势能的减少量为 ΔE =mgh,若机械能守恒,则有mgh=1m(
p
t2 t2 2
2 1
d2 -d2 ),即h= d2 (1-1),则根据测量数据可以通过描绘以h为纵轴,以 1-1 为横轴的图像来验证
t2 t2 2g t2 t2 t2 t2
2 1 2 1 2 1
机械能是否守恒。故选B。由h= d2 (1-1)可知若图像是过原点的直线,且图像斜率k= d2 ,即
2g
t2 t2
2g
2 1
可验证机械能守恒定律。
d2
答案:(2)12.1 (5)B
2g
4.(8分)(2023·阜新模拟)学校物理兴趣小组用如图甲所示的装置验证 A、B两物块组成的系统
机械能守恒。物块A从高处由静止下落,物块B上拖着的纸带打出一系列的点,对纸带上的点
迹进行测量并进行数据处理,即可验证机械能守恒定律。图乙是实验中获取的一条纸带,0是
打下的第一个点,每相邻两个计数点间还有4个计时点(图中未画出),计数点间的距离已标出。物块A的质量为300 g,物块B的质量为200 g,打点计时器所接交流电源的频率为 50 Hz,结果
均保留三位有效数字。
(1)打点计时器打下计数点5时,物块A的速度大小为 m/s。
(2)若取重力加速度大小 g=10 m/s2,则在打点计时器打计数点 0到打计数点5的过程中,两物块
组成的系统动能的增加量为 J,系统重力势能的减少量为
J,由此得出的结论是: 。
(3)测出某个计数点到计数点 0的距离h以及打点计时器打该计数点时物块 A的速度大小,选
取多个计数点,得到多组数据。若作出的v2-h图像如图丙所示,则当地的实际重力加速度大小
为 m/s2。
【解析】(1)相邻计数点间的时间间隔T=0.1 s,打点计时器打下计数点5时,物块A的速度大小x
为v = 46=0.980 m/s;
5
2T
(2)在打点计时器打计数点0到打计数点5的过程中,两物块组成的系统动能的增加量为ΔE =
k
1
(m +m )v2=0.240 J,系统重力势能的减少量为ΔE =(m -m )gh =0.244 J;由此得出的结论是:在
A B p A B 05
2 5
误差允许的范围内,两物块组成的系统机械能守恒。
(3)根据1(m +m )v2=(m -m )gh得v2=2(m -m ) gh,结合图像可得 2(m -m ) g=4.66,代入数
A B A B A B A B
2 (m +m ) (m +m ) 1.2
A B A B
据解得g=9.71 m/s2。
答案:(1)0.980 (2)0.240 0.244 在误差允许的范围内,两物块组成的系统机械能守恒
(3)9.71
【加固训练】
某同学用图甲的装置验证机械能守恒定律。大小相同、质量不同的两小球 A、B分别固
定在轻杆两端,轻杆可绕固定于杆上三等分点的光滑水平轴O在竖直面内转动,转轴正下方有
一光电门计时器,小球通过计时器时其球心恰好与光电门等高。已知当地的重力加速度为 g。
现将轻杆拉至如图甲所示的水平位置并由静止释放,当A球第一次通过光电门时,计时器显示
的遮光时间为Δt=0.01 s。回答下列问题:(1)用游标卡尺测量小球的直径时如图乙所示,则小球的直径d= cm;
(2)小球A经过光电门时速度v= m/s(保留三位有效数字)
(3)若两小球A、B球心间的距离为L,小球A的质量是小球B质量的n倍(n>1),当改变L,则得
到不同的Δt,作出如图丙所示的图像。只要该图像斜率k= ,即可说明此过程中A、
B构成的系统机械能守恒(用已知量和测量量的符号表示)
【解析】(1)根据题意,由图乙可知,游标为50分度,且第25个小格与主尺对齐,由游标卡尺读数
49
规律可得,该读数为d=47 mm-25× mm=22.50 mm=2.250 cm;
50
(2)利用平均速度代替瞬时速度算得小球经过光电门时的速度,可得小球A经过最低点的速度
d
为v= =2.25 m/s;
Δt
2L L 1 1 v d
(3)根据题意,若系统机械能守恒,则有nmg· -mg· = nmv2+ m( )2,将v= 代入,整理可得
3 3 2 2 2 Δt
3(4n+1)d2 1 1 3d2(4n+1)
L= · ,即图像L- 的斜率为k= ,即可说明此过程中A、B构成的系
8(2n-1)g Δt2 Δt2 8g(2n-1)
统机械能守恒。
3d2(4n+1)
答案:(1)2.250 (2)2.25 (3)
8g(2n-1)5.(8分)(2023·哈尔滨模拟)小华同学利用图甲所示实验装置来验证机械能守恒定律。所用器材
包括:装有声音传感器的智能手机、铁球、刻度尺、钢尺等。实验操作步骤如下:
a.将钢尺伸出水平桌面少许,用刻度尺测出钢尺上表面与地板间的高度差
h=76.00 cm
b.将质量为m的铁球放在钢尺末端,保持静止状态
c.将手机位于桌面上方,运行手机中的声音“振幅”(声音传感器)项目
d.迅速敲击钢尺侧面,铁球自由下落
e.传感器记录声音振幅随时间的变化曲线
(1)声音振幅随时间的变化曲线如图乙所示,第一、第二个尖峰的横坐标分别对应敲击钢尺和
铁球落地的时刻,则铁球下落的时间间隔t= s。
(2)若铁球下落过程中机械能守恒,则应满足等式:mgh= (用m、h、t表示)。
(3)若敲击钢尺侧面时铁球获得一个较小的水平速度,对实验测量结果(选填“有”或“没有”)影响。
(4)小明同学认为应将手机放在钢尺与地板间的中点附近测量时间。你认为哪位同学的时间
测量结果更准确,请简要说明理由 。
(5)若已知铁球质量为100 g,g=9.80 m/s2,则下落过程中减小的重力势能ΔE =
p
J,增加的动能ΔE = J(结果保留三位有效数字)。
k
相对误差η=ΔE -ΔE ×100%= %<5%,(结果保留一位有效数字)。据此可以得到的实
p k
ΔE
p
验结论:在误差允许的范围内,铁球在自由下落过程中机械能守恒。
【解析】(1)由图乙可知,时间间隔为t=2.05 s-1.65 s=0.40 s;
0+v 2h
(2)铁球下落过程中,设下落时间为t,落地速度为v,根据公式h= t可得v= ,小球增加的动
2 t
1 1 2h
能为ΔE = mv2= m( )2,下落过程中减小的重力势能ΔE =mgh,若铁球下落过程中机械能守
k p
2 2 t
恒,则应满足等式mgh=2mh2;
t2
(3)小球在竖直方向上做自由落体运动,小球下落的时间由高度决定,若敲击钢尺侧面时铁球获
得一个较小的水平速度,不会影响小球的落地时间,故对实验测量结果没有影响;
(4)小明,因为将手机放在钢尺与地板间的中点附近测量时间,两次手机接收声音滞后的时间几
乎相等,时间间隔测量更准确;
1
(5)下落过程中减小的重力势能ΔE =mgh=100×10-3×9.80×76×10-2 J≈0.745 J,增加的动能ΔE =
p k
2m(2h)2=1×100×10-3×(2×76×10-2)2 J=0.722 J,相对误差 η=ΔE -ΔE ×100%=0.745-0.722
p k
t 2 0.40 ΔE 0.745
p
×100%≈3%。
答案:(1)0.4 (2)2mh2 (3)没有 (4)小明,因为将手机放在钢尺与地板间的中点附近测量时间,
t2
两次手机接收声音滞后的时间几乎相等,时间间隔测量更准确 (5)0.745 0.722 3
【加固训练】
(2023·丹东模拟)某实验小组为验证系统机械能守恒,设计了如图甲所示的装置,实验过程
如下:
(1)用螺旋测微器测量钩码上端固定的遮光片厚度时,螺旋测微器示数如图乙所示,则 d=
mm,测得钩码和遮光片总质量m=0.026 kg;
(2)按图甲安装实验器材并调试,确保钩码竖直上下振动时,遮光片运动最高点高于光电门1的激光孔,运动最低点低于光电门2的激光孔;
(3)实验时,利用计算机记录弹簧拉伸量x及力传感器的读数F,画出F-x图像,如图丙所示;
(4)测量遮光片经过光电门1的挡光时间t =0.005 1 s,弹簧的拉伸量x =0.04 m,经过光电门2的
1 1
挡光时间t =0.010 2 s,弹簧的拉伸量x =0.08 m,以及两个光电门激光孔之间的距离h=0.04 m;
2 2
(5)遮光片从光电门1运动到光电门2的过程中,系统势能的增加量E =
P
J,系统动能的减少量E = J(结果保留三位有效数字,
k
g=10 m/s2),实验表明在误差允许范围内系统机械能守恒。
【解析】(1)螺旋测微器的分度值为0.01 mm,则遮光片厚度为d=2 mm+4.0×
0.01 mm=2.040 mm;
0.2+0.4
(5)遮光片从光电门1运动到光电门2的过程中, 弹性势能增加量E = ×
p1
2
0.04 J=0.012 J,重力势能减小量E =mg(x -x )=0.010 4 J,系统势能的增加量E =E -E =1.60×10-3
p2 2 1 p p1 p2
d 1 d 1 d
J,通过光电门的速度v= ,系统动能的减少量E = m( )2- m( )2=1.56×10-3 J。
t k 2 t 2 t
1 2
答案:(1)2.040 (5)1.60×10-3 1.56×10-3
