
文档内容
专题 10 动能定理的应用
[题型导航]
题型一 动能定理的理解.......................................................................................................................1
题型二 动能定理的基本应用...............................................................................................................3
题型三 动能定理与图像的结合...........................................................................................................5
题型四 动能定理在多过程问题中的应用...........................................................................................7
[考点分析]
题型一 动能定理的理解
1.表达式:W=E -E =ΔE.
k2 k1 k
其中E =mv表示一个过程的末动能,E =mv表示这个过程的初动能.W表示这个过程中合力做的功.
k2 k1
2.关于动能定理的几点说明
(1)W的含义:包含重力在内的所有外力所做功的代数和.
(2)W与ΔE 的关系:合力做功是引起物体动能变化的原因.如果合力对物体做正功,物体的动能增
k
加;如果合力对物体做负功,物体的动能减少;如果合力对物体不做功,物体的动能不变.
(3)动能定理的实质:功能关系的一种具体体现,物体动能的改变可由合外力做功来度量.
[例题1] (多选)改变消防车的质量和速度,都能使消防车的动能发生改变.在下列几种
情况下,消防车的动能是原来的2倍的是( )
A.质量不变,速度增大到原来2倍
B.速度不变,质量增大到原来的2倍
C.质量减半,速度增大到原来的4倍
D.速度减半,质量增大到原来的8倍
[例题2] 关于动能的理解,下列说法正确的是( )
A.凡是运动的物体都具有动能
B.重力势能可以为负值,动能也可以为负值C.一定质量的物体,动能变化时,速度一定变化,速度变化时,动能也一定变化
D.动能不变的物体,一定处于平衡状态
[例题3] 一颗质量为m的卫星在离地球表面一定高度的轨道上绕地球做圆周运动,若已知
地球半径为R,地球表面的重力加速度为g,卫星的向心加速度与地球表面的重力加速度大小
之比为1:9,卫星的动能为( )
mgR mgR mg2R2 mgR2
A. B. C. D.
4 6 6 6
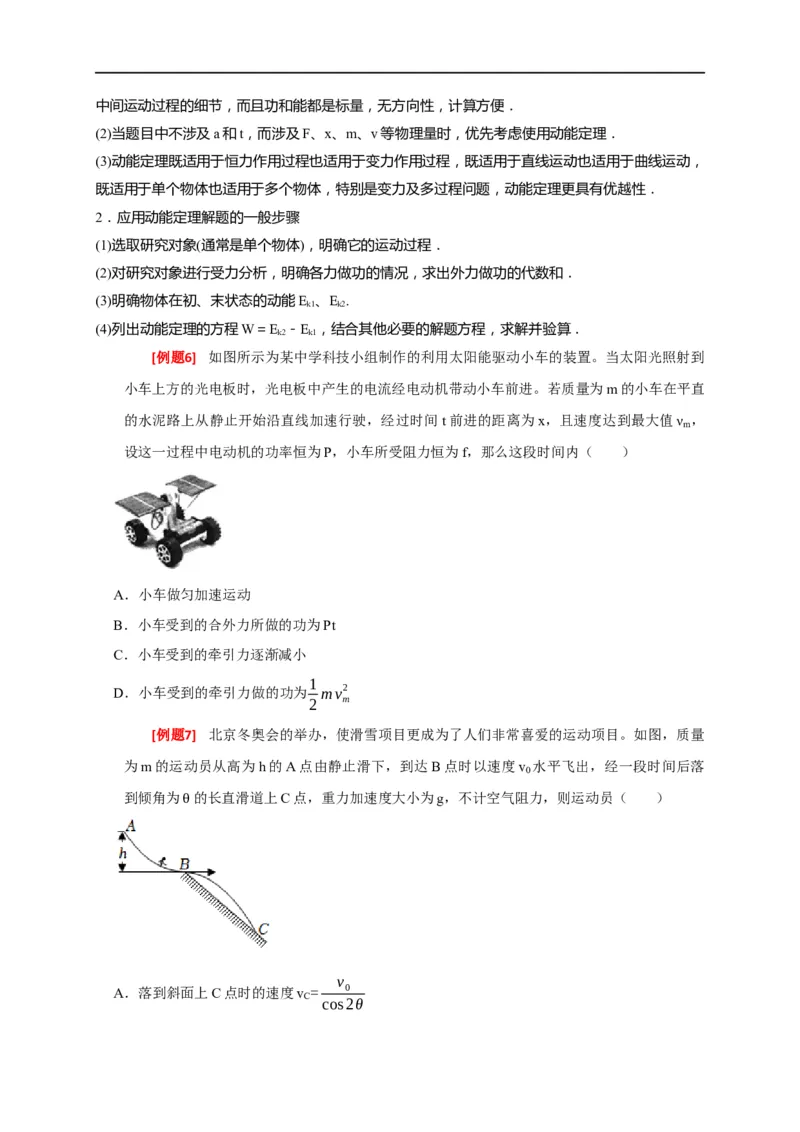
[例题4] 绳索套马是内蒙古牧民的重要体育活动。某次活动中,套马者骑在马背上以速度
v追赶提前释放的烈马,同时挥动质量为m的套马圈,使套马圈围绕套马者在水平面内做角速
度为 、半径为r的匀速圆周运动,追逐一段时间后套马者和烈马的距离 s保持不变,待套马
圈运动ω到烈马正后方时,套马者松开套马圈,最终成功套住烈马。运动过程中,套马者和烈马
行进路线平行,松手后套马圈在空中的运动可视为平抛运动。下列说法正确的是( )
A.套马圈围绕套马者作图示顺时针的圆周运动
s
B.套马圈做平抛运动的时间为
ωr
C.套马圈做平抛运动的初速度为v+ r
D.套马者刚松手时,套马圈的动能为ωm 2r2
[例题5] 改变汽车的质量和速度,ω都能使汽车的动能发生变化.在下列几种情况中,关于
汽车的动能的说法不正确的是( )
A.质量不变,速度增大到原来的2倍,汽车的动能变为原来的4倍
B.速度不变,质量增大到原来的2倍,汽车的动能变为原来的2倍
C.质量减半,速度增大到原来的4倍,汽车的动能不变
D.速度减半,质量增大到原来的4倍,汽车的动能不变
题型二 动能定理的基本应用
1.应用动能定理解题的优点
(1)动能定理对应的是一个过程,只涉及到物体初、末状态的动能和整个过程合力做的功,无需关心中间运动过程的细节,而且功和能都是标量,无方向性,计算方便.
(2)当题目中不涉及a和t,而涉及F、x、m、v等物理量时,优先考虑使用动能定理.
(3)动能定理既适用于恒力作用过程也适用于变力作用过程,既适用于直线运动也适用于曲线运动,
既适用于单个物体也适用于多个物体,特别是变力及多过程问题,动能定理更具有优越性.
2.应用动能定理解题的一般步骤
(1)选取研究对象(通常是单个物体),明确它的运动过程.
(2)对研究对象进行受力分析,明确各力做功的情况,求出外力做功的代数和.
(3)明确物体在初、末状态的动能E 、E .
k1 k2
(4)列出动能定理的方程W=E -E ,结合其他必要的解题方程,求解并验算.
k2 k1
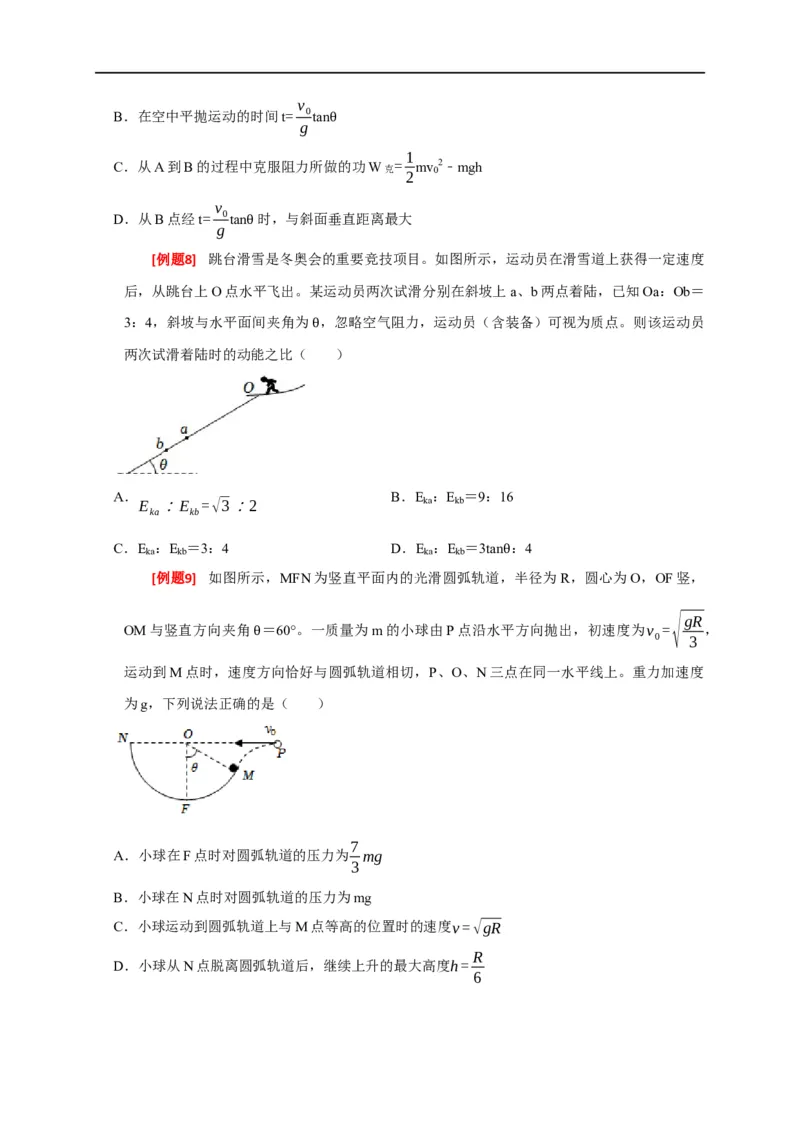
[例题6] 如图所示为某中学科技小组制作的利用太阳能驱动小车的装置。当太阳光照射到
小车上方的光电板时,光电板中产生的电流经电动机带动小车前进。若质量为m的小车在平直
的水泥路上从静止开始沿直线加速行驶,经过时间 t前进的距离为x,且速度达到最大值ν ,
m
设这一过程中电动机的功率恒为P,小车所受阻力恒为f,那么这段时间内( )
A.小车做匀加速运动
B.小车受到的合外力所做的功为Pt
C.小车受到的牵引力逐渐减小
1
D.小车受到的牵引力做的功为 mν2
2 m
[例题7] 北京冬奥会的举办,使滑雪项目更成为了人们非常喜爱的运动项目。如图,质量
为m的运动员从高为h的A点由静止滑下,到达B点时以速度v 水平飞出,经一段时间后落
0
到倾角为 的长直滑道上C点,重力加速度大小为g,不计空气阻力,则运动员( )
θ
v
A.落到斜面上C点时的速度v = 0
C
cos2θv
B.在空中平抛运动的时间t= 0tan
g
θ
1
C.从A到B的过程中克服阻力所做的功W克 = mv
0
2﹣mgh
2
v
D.从B点经t= 0tan 时,与斜面垂直距离最大
g
θ
[例题8] 跳台滑雪是冬奥会的重要竞技项目。如图所示,运动员在滑雪道上获得一定速度
后,从跳台上O点水平飞出。某运动员两次试滑分别在斜坡上a、b两点着陆,已知Oa:Ob=
3:4,斜坡与水平面间夹角为 ,忽略空气阻力,运动员(含装备)可视为质点。则该运动员
两次试滑着陆时的动能之比( θ )
A. B.E :E =9:16
E :E =√3:2 ka kb
ka kb
C.E :E =3:4 D.E :E =3tan :4
ka kb ka kb
[例题9] 如图所示,MFN为竖直平面内的光滑圆弧轨道,θ半径为R,圆心为O,OF竖,
√gR
OM与竖直方向夹角 =60°。一质量为m的小球由P点沿水平方向抛出,初速度为v = ,
0 3
θ
运动到M点时,速度方向恰好与圆弧轨道相切,P、O、N三点在同一水平线上。重力加速度
为g,下列说法正确的是( )
7
A.小球在F点时对圆弧轨道的压力为 mg
3
B.小球在N点时对圆弧轨道的压力为mg
C.小球运动到圆弧轨道上与M点等高的位置时的速度v=√gR
R
D.小球从N点脱离圆弧轨道后,继续上升的最大高度h=
6题型三 动能定理与图像的结合
1.解决物理图像问题的基本步骤
(1)观察题目给出的图像,弄清纵坐标、横坐标所对应的物理量及图线所表示的物理意义。
(2)根据物理规律推导出纵坐标与横坐标所对应的物理量间的函数关系式。
(3)将推导出的物理规律与数学上与之相对应的标准函数关系式相对比,找出图线的斜率、截距、图
线的交点、图线下的面积所对应的物理意义,分析解答问题,或者利用函数图线上的特定值代入函
数关系式求物理量。
2.四类图像所围面积的含义
(1)vt图:由公式x=vt可知,vt图线与坐标轴围成的面积表示物体的位移。
(2)at图:由公式Δv=at可知,at图线与坐标轴围成的面积表示物体速度的变化量。
(3)Fs图:由公式W=Fs可知,Fs图线与坐标轴围成的面积表示力所做的功。
(4)Pt图:由公式W=Pt可知,Pt图线与坐标轴围成的面积表示力所做的功。
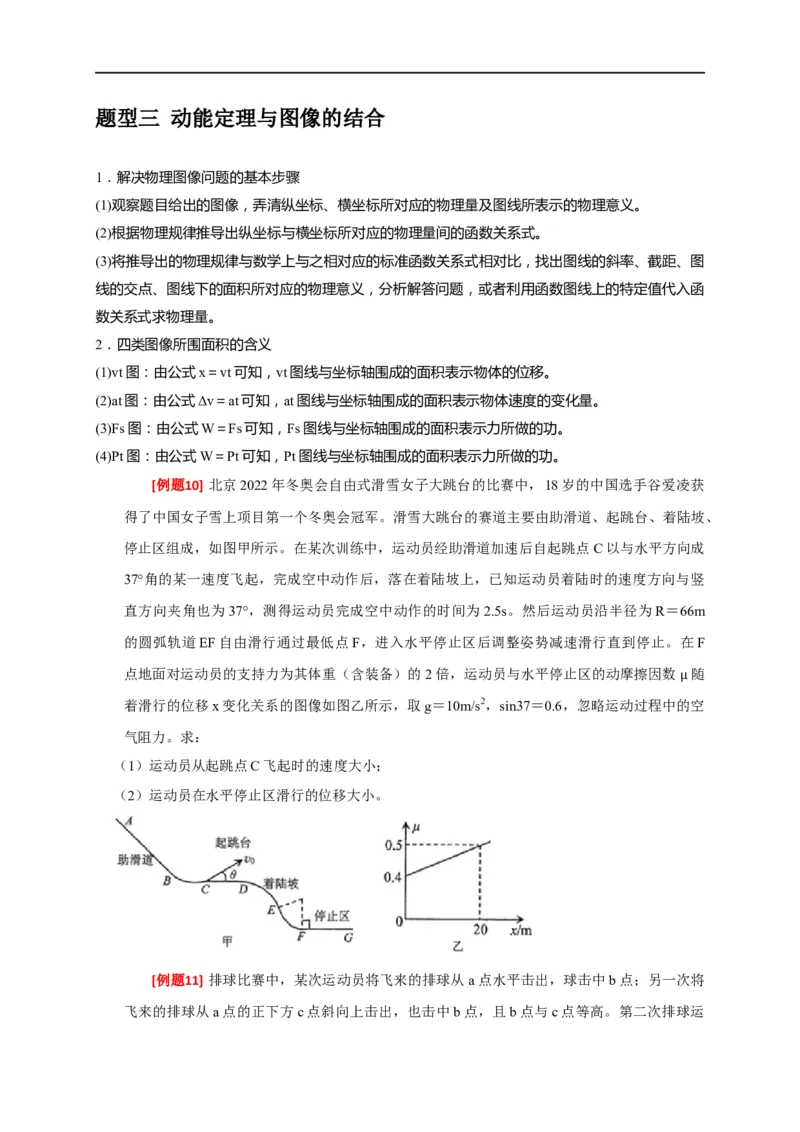
[例题10] 北京2022年冬奥会自由式滑雪女子大跳台的比赛中,18岁的中国选手谷爱凌获
得了中国女子雪上项目第一个冬奥会冠军。滑雪大跳台的赛道主要由助滑道、起跳台、着陆坡、
停止区组成,如图甲所示。在某次训练中,运动员经助滑道加速后自起跳点 C以与水平方向成
37°角的某一速度飞起,完成空中动作后,落在着陆坡上,已知运动员着陆时的速度方向与竖
直方向夹角也为37°,测得运动员完成空中动作的时间为2.5s。然后运动员沿半径为R=66m
的圆弧轨道EF自由滑行通过最低点F,进入水平停止区后调整姿势减速滑行直到停止。在F
点地面对运动员的支持力为其体重(含装备)的 2倍,运动员与水平停止区的动摩擦因数 随
着滑行的位移x变化关系的图像如图乙所示,取g=10m/s2,sin37=0.6,忽略运动过程中的μ空
气阻力。求:
(1)运动员从起跳点C飞起时的速度大小;
(2)运动员在水平停止区滑行的位移大小。
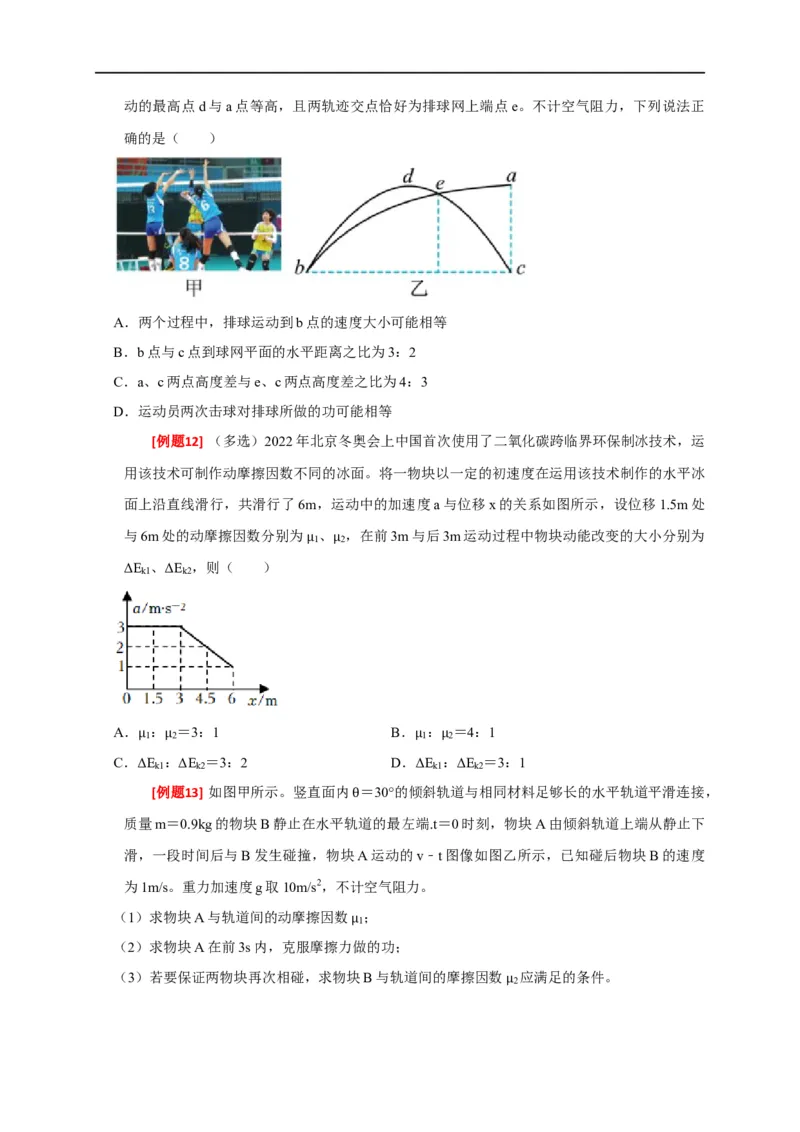
[例题11] 排球比赛中,某次运动员将飞来的排球从a点水平击出,球击中b点;另一次将
飞来的排球从a点的正下方c点斜向上击出,也击中b点,且b点与c点等高。第二次排球运动的最高点d与a点等高,且两轨迹交点恰好为排球网上端点e。不计空气阻力,下列说法正
确的是( )
A.两个过程中,排球运动到b点的速度大小可能相等
B.b点与c点到球网平面的水平距离之比为3:2
C.a、c两点高度差与e、c两点高度差之比为4:3
D.运动员两次击球对排球所做的功可能相等
[例题12] (多选)2022年北京冬奥会上中国首次使用了二氧化碳跨临界环保制冰技术,运
用该技术可制作动摩擦因数不同的冰面。将一物块以一定的初速度在运用该技术制作的水平冰
面上沿直线滑行,共滑行了6m,运动中的加速度a与位移x的关系如图所示,设位移1.5m处
与6m处的动摩擦因数分别为 、 ,在前3m与后3m运动过程中物块动能改变的大小分别为
1 2
ΔE 、ΔE ,则( ) μ μ
k1 k2
A. : =3:1 B. : =4:1
1 2 1 2
C.ΔμE
k1
:μ ΔE
k2
=3:2 D.μΔE k1μ:ΔE
k2
=3:1
[例题13] 如图甲所示。竖直面内 =30°的倾斜轨道与相同材料足够长的水平轨道平滑连接,
质量m=0.9kg的物块B静止在水平轨θ道的最左端.t=0时刻,物块A由倾斜轨道上端从静止下
滑,一段时间后与B发生碰撞,物块A运动的v﹣t图像如图乙所示,已知碰后物块B的速度
为1m/s。重力加速度g取10m/s2,不计空气阻力。
(1)求物块A与轨道间的动摩擦因数 ;
1
(2)求物块A在前3s内,克服摩擦力μ做的功;
(3)若要保证两物块再次相碰,求物块B与轨道间的摩擦因数 应满足的条件。
2
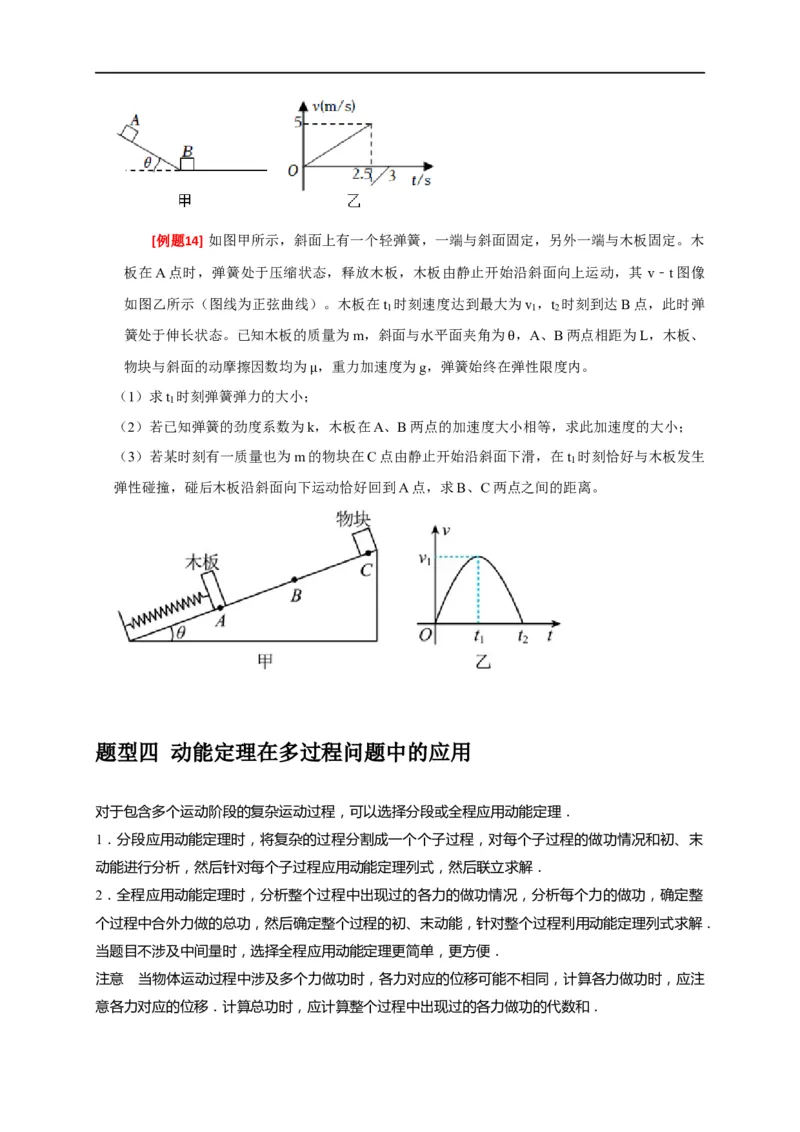
μ[例题14] 如图甲所示,斜面上有一个轻弹簧,一端与斜面固定,另外一端与木板固定。木
板在A点时,弹簧处于压缩状态,释放木板,木板由静止开始沿斜面向上运动,其 v﹣t图像
如图乙所示(图线为正弦曲线)。木板在t 时刻速度达到最大为v ,t 时刻到达B点,此时弹
1 1 2
簧处于伸长状态。已知木板的质量为m,斜面与水平面夹角为 ,A、B两点相距为L,木板、
物块与斜面的动摩擦因数均为 ,重力加速度为g,弹簧始终在θ弹性限度内。
(1)求t
1
时刻弹簧弹力的大小;μ
(2)若已知弹簧的劲度系数为k,木板在A、B两点的加速度大小相等,求此加速度的大小;
(3)若某时刻有一质量也为m的物块在C点由静止开始沿斜面下滑,在t 时刻恰好与木板发生
1
弹性碰撞,碰后木板沿斜面向下运动恰好回到A点,求B、C两点之间的距离。
题型四 动能定理在多过程问题中的应用
对于包含多个运动阶段的复杂运动过程,可以选择分段或全程应用动能定理.
1.分段应用动能定理时,将复杂的过程分割成一个个子过程,对每个子过程的做功情况和初、末
动能进行分析,然后针对每个子过程应用动能定理列式,然后联立求解.
2.全程应用动能定理时,分析整个过程中出现过的各力的做功情况,分析每个力的做功,确定整
个过程中合外力做的总功,然后确定整个过程的初、末动能,针对整个过程利用动能定理列式求解.
当题目不涉及中间量时,选择全程应用动能定理更简单,更方便.
注意 当物体运动过程中涉及多个力做功时,各力对应的位移可能不相同,计算各力做功时,应注
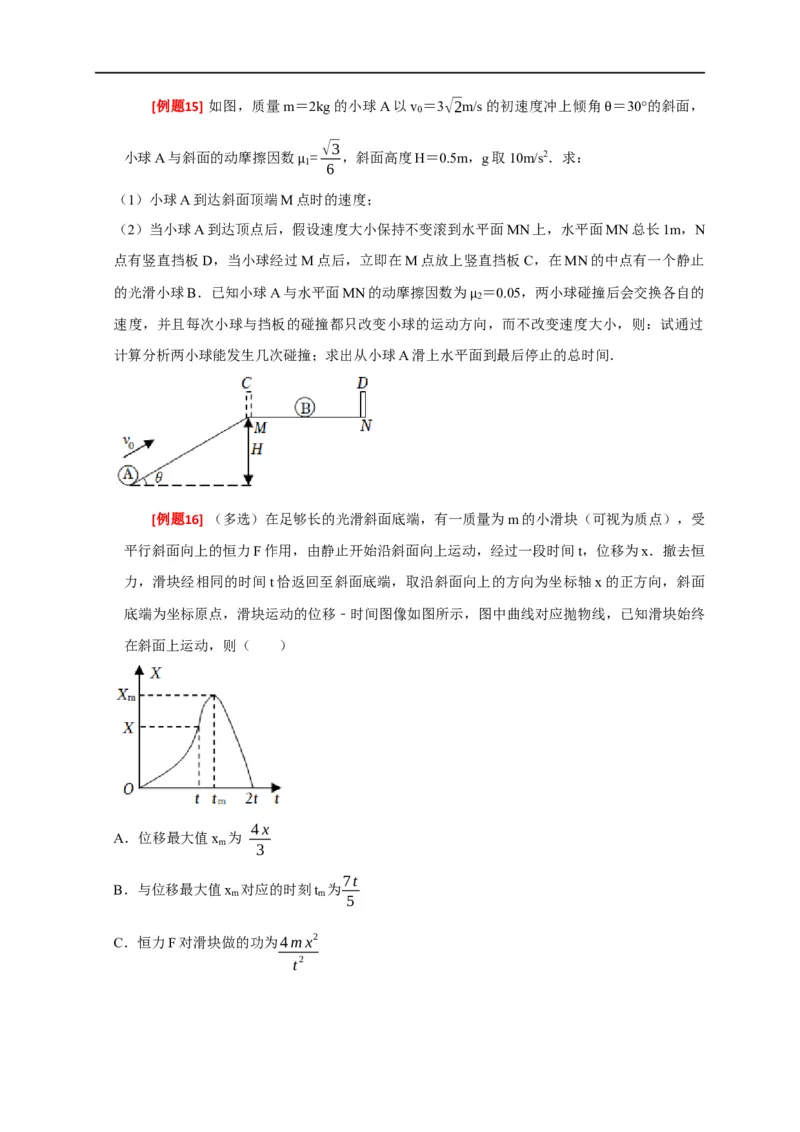
意各力对应的位移.计算总功时,应计算整个过程中出现过的各力做功的代数和.[例题15] 如图,质量m=2kg的小球A以v =3√2m/s的初速度冲上倾角 =30°的斜面,
0
θ
√3
小球A与斜面的动摩擦因数 = ,斜面高度H=0.5m,g取10m/s2.求:
1
6
μ
(1)小球A到达斜面顶端M点时的速度;
(2)当小球A到达顶点后,假设速度大小保持不变滚到水平面MN上,水平面MN总长1m,N
点有竖直挡板D,当小球经过M点后,立即在M点放上竖直挡板C,在MN的中点有一个静止
的光滑小球B.已知小球A与水平面MN的动摩擦因数为 =0.05,两小球碰撞后会交换各自的
2
速度,并且每次小球与挡板的碰撞都只改变小球的运动方μ向,而不改变速度大小,则:试通过
计算分析两小球能发生几次碰撞;求出从小球A滑上水平面到最后停止的总时间.
[例题16] (多选)在足够长的光滑斜面底端,有一质量为m的小滑块(可视为质点),受
平行斜面向上的恒力F作用,由静止开始沿斜面向上运动,经过一段时间t,位移为x.撤去恒
力,滑块经相同的时间t恰返回至斜面底端,取沿斜面向上的方向为坐标轴x的正方向,斜面
底端为坐标原点,滑块运动的位移﹣时间图像如图所示,图中曲线对应抛物线,已知滑块始终
在斜面上运动,则( )
4x
A.位移最大值x 为
m
3
7t
B.与位移最大值x 对应的时刻t 为
m m
5
C.恒力F对滑块做的功为4mx2
t2D.滑块返回至斜面底端的动能为8mx2
t2
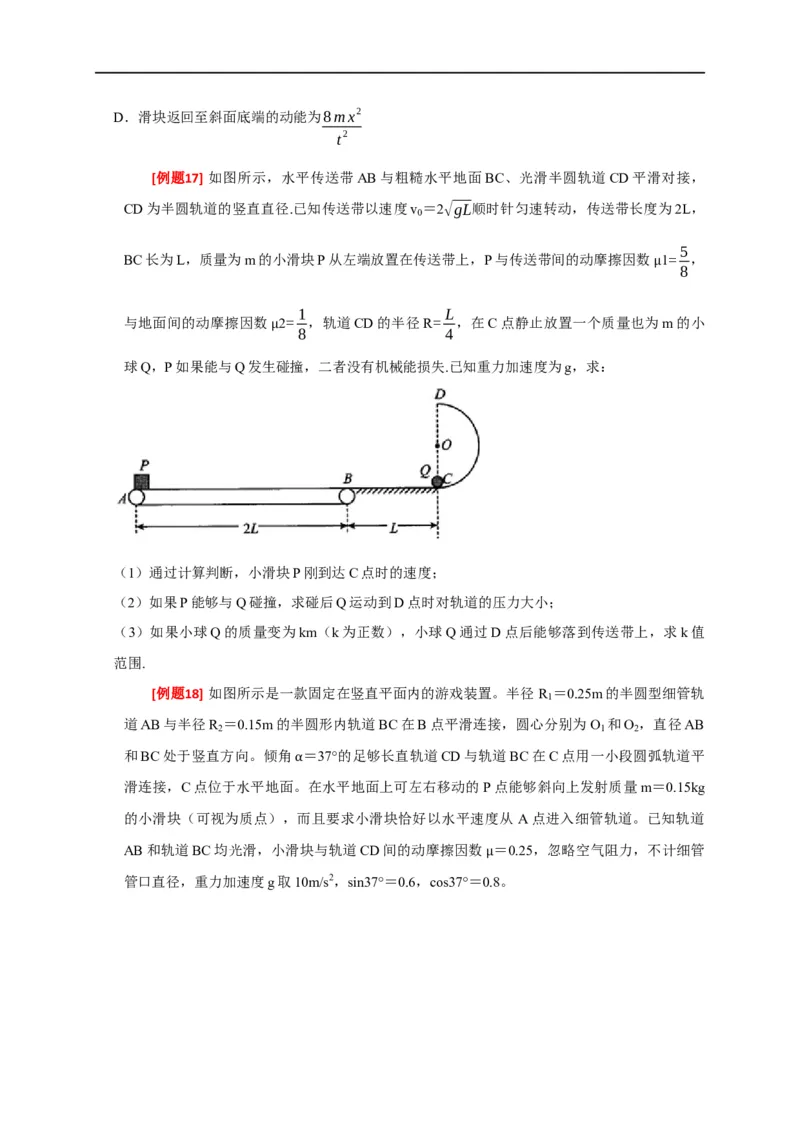
[例题17] 如图所示,水平传送带AB与粗糙水平地面BC、光滑半圆轨道CD平滑对接,
CD为半圆轨道的竖直直径.已知传送带以速度v =2√gL顺时针匀速转动,传送带长度为2L,
0
5
BC长为L,质量为m的小滑块P从左端放置在传送带上,P与传送带间的动摩擦因数 1= ,
8
μ
1 L
与地面间的动摩擦因数 2= ,轨道CD的半径R= ,在C点静止放置一个质量也为m的小
8 4
μ
球Q,P如果能与Q发生碰撞,二者没有机械能损失.已知重力加速度为g,求:
(1)通过计算判断,小滑块P刚到达C点时的速度;
(2)如果P能够与Q碰撞,求碰后Q运动到D点时对轨道的压力大小;
(3)如果小球Q的质量变为km(k为正数),小球Q通过D点后能够落到传送带上,求k值
范围.
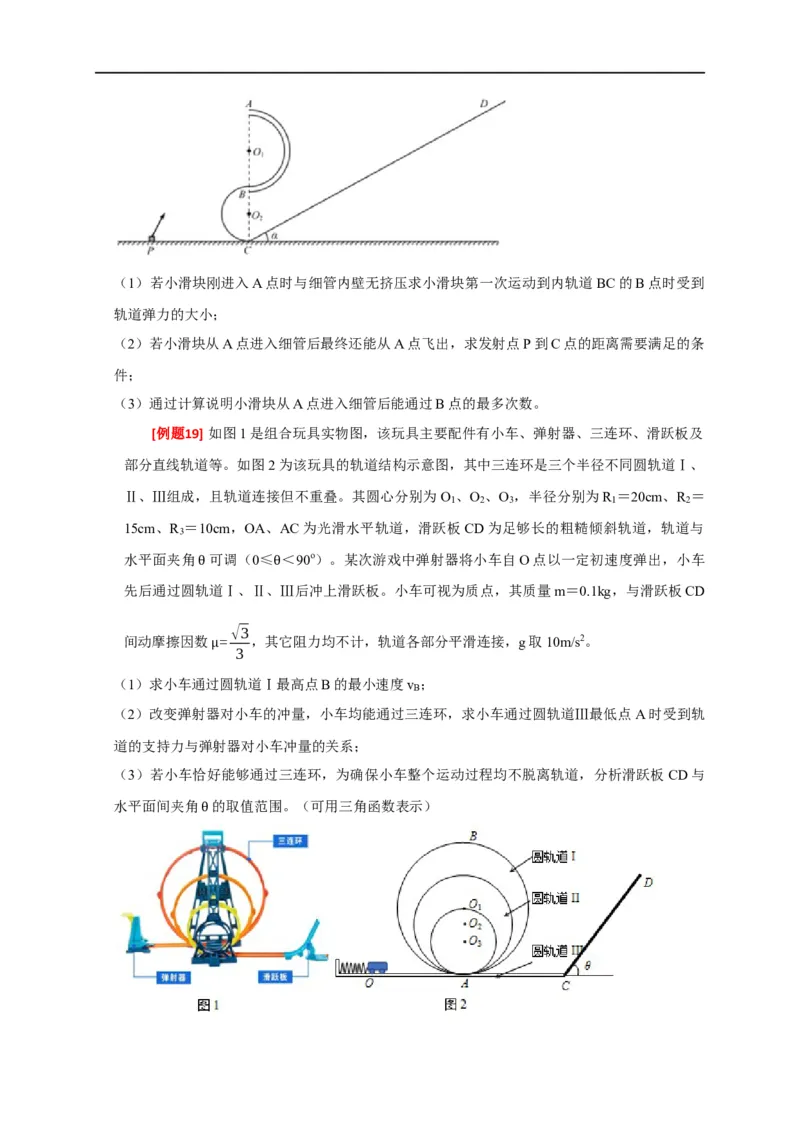
[例题18] 如图所示是一款固定在竖直平面内的游戏装置。半径 R =0.25m的半圆型细管轨
1
道AB与半径R =0.15m的半圆形内轨道BC在B点平滑连接,圆心分别为O 和O ,直径AB
2 1 2
和BC处于竖直方向。倾角 =37°的足够长直轨道CD与轨道BC在C点用一小段圆弧轨道平
滑连接,C点位于水平地面。α 在水平地面上可左右移动的P点能够斜向上发射质量m=0.15kg
的小滑块(可视为质点),而且要求小滑块恰好以水平速度从 A点进入细管轨道。已知轨道
AB和轨道BC均光滑,小滑块与轨道CD间的动摩擦因数 =0.25,忽略空气阻力,不计细管
管口直径,重力加速度g取10m/s2,sin37°=0.6,cos37°=0μ.8。(1)若小滑块刚进入A点时与细管内壁无挤压求小滑块第一次运动到内轨道BC的B点时受到
轨道弹力的大小;
(2)若小滑块从A点进入细管后最终还能从A点飞出,求发射点P到C点的距离需要满足的条
件;
(3)通过计算说明小滑块从A点进入细管后能通过B点的最多次数。
[例题19] 如图1是组合玩具实物图,该玩具主要配件有小车、弹射器、三连环、滑跃板及
部分直线轨道等。如图2为该玩具的轨道结构示意图,其中三连环是三个半径不同圆轨道Ⅰ、
Ⅱ、Ⅲ组成,且轨道连接但不重叠。其圆心分别为O 、O 、O ,半径分别为R =20cm、R =
1 2 3 1 2
15cm、R =10cm,OA、AC为光滑水平轨道,滑跃板CD为足够长的粗糙倾斜轨道,轨道与
3
水平面夹角 可调(0≤ <90o)。某次游戏中弹射器将小车自O点以一定初速度弹出,小车
先后通过圆轨θ道Ⅰ、Ⅱ、θⅢ后冲上滑跃板。小车可视为质点,其质量m=0.1kg,与滑跃板CD
√3
间动摩擦因数 = ,其它阻力均不计,轨道各部分平滑连接,g取10m/s2。
3
μ
(1)求小车通过圆轨道Ⅰ最高点B的最小速度v ;
B
(2)改变弹射器对小车的冲量,小车均能通过三连环,求小车通过圆轨道Ⅲ最低点A时受到轨
道的支持力与弹射器对小车冲量的关系;
(3)若小车恰好能够通过三连环,为确保小车整个运动过程均不脱离轨道,分析滑跃板CD与
水平面间夹角 的取值范围。(可用三角函数表示)
θ
