文档内容
第 10 讲 圆周运动
1.掌握描述圆周运动的物理量及它们之间的关系
2.理解向心力公式并能应用,圆周运动的动力学分析
3.了解物体做离心运动的条件
考点一 圆周运动中的运动学分析
1.线速度:描述物体圆周运动快慢的物理量.v==.
2.角速度:描述物体绕圆心转动快慢的物理量.ω==.
3.周期和频率:描述物体绕圆心转动快慢的物理量.T=,T=.
4.向心加速度:描述速度方向变化快慢的物理量.a=rω2==ωv=r.
n
5.相互关系:(1)v=ωr=r= 2π rf . (2)a==rω2=ωv=r=4π2f2r.
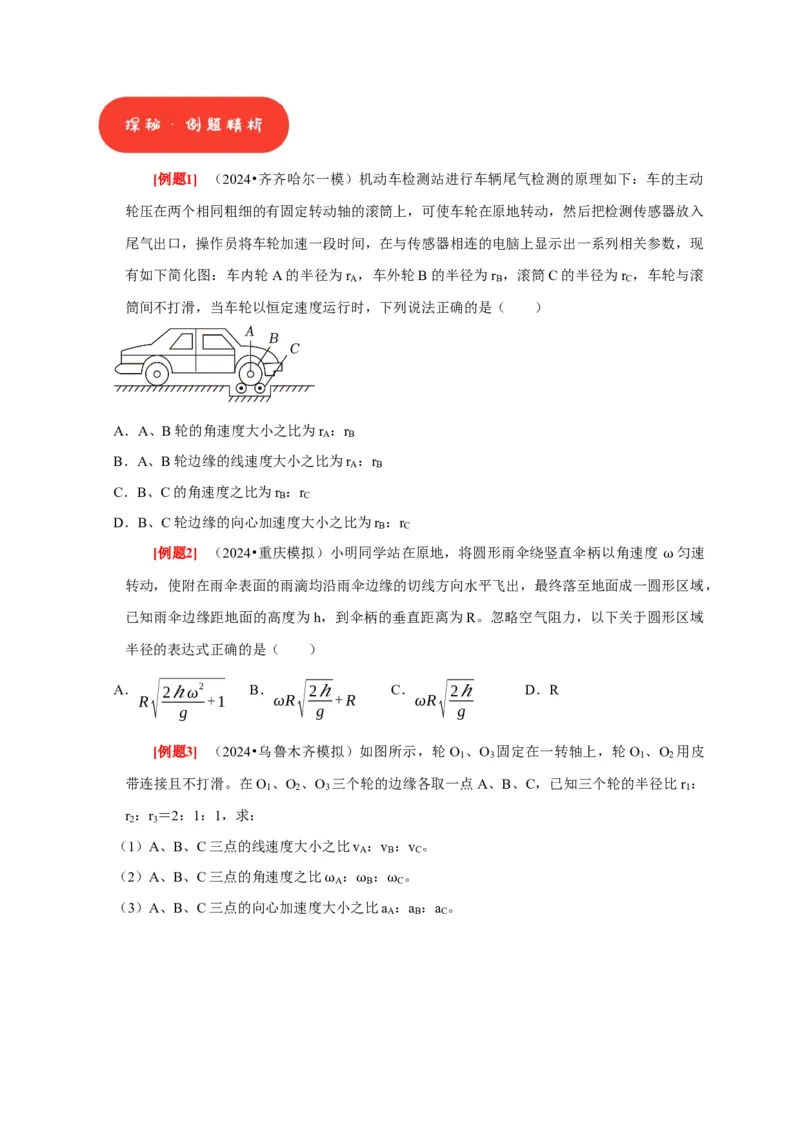
n[例题1] (2024•齐齐哈尔一模)机动车检测站进行车辆尾气检测的原理如下:车的主动
轮压在两个相同粗细的有固定转动轴的滚筒上,可使车轮在原地转动,然后把检测传感器放入
尾气出口,操作员将车轮加速一段时间,在与传感器相连的电脑上显示出一系列相关参数,现
有如下简化图:车内轮A的半径为r ,车外轮B的半径为r ,滚筒C的半径为r ,车轮与滚
A B C
筒间不打滑,当车轮以恒定速度运行时,下列说法正确的是( )
A.A、B轮的角速度大小之比为r :r
A B
B.A、B轮边缘的线速度大小之比为r :r
A B
C.B、C的角速度之比为r :r
B C
D.B、C轮边缘的向心加速度大小之比为r :r
B C
[例题2] (2024•重庆模拟)小明同学站在原地,将圆形雨伞绕竖直伞柄以角速度 匀速
转动,使附在雨伞表面的雨滴均沿雨伞边缘的切线方向水平飞出,最终落至地面成一圆形ω区域,
已知雨伞边缘距地面的高度为h,到伞柄的垂直距离为R。忽略空气阻力,以下关于圆形区域
半径的表达式正确的是( )
A.
R
√2ℎω2
+1
B.
ωR
√2ℎ
+R
C.
ωR
√2ℎ D.R
g g g
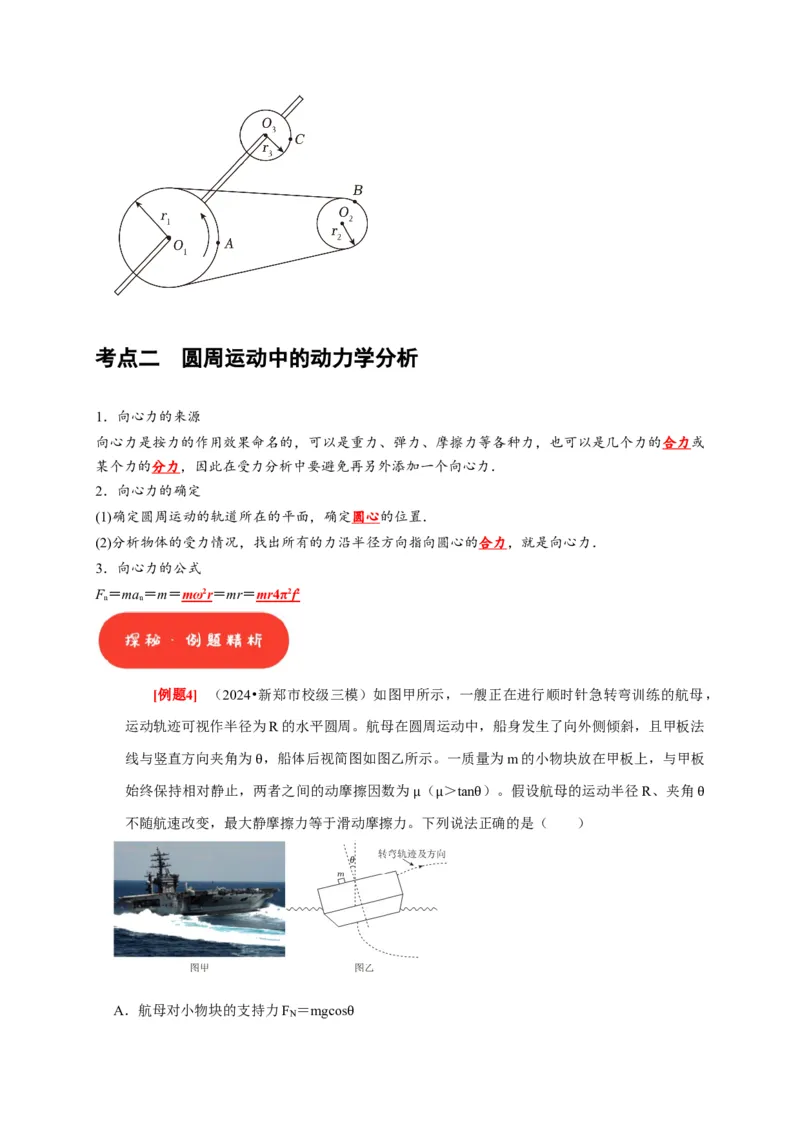
[例题3] (2024•乌鲁木齐模拟)如图所示,轮 O 、O 固定在一转轴上,轮O 、O 用皮
1 3 1 2
带连接且不打滑。在O 、O 、O 三个轮的边缘各取一点A、B、C,已知三个轮的半径比r :
1 2 3 1
r :r =2:1:1,求:
2 3
(1)A、B、C三点的线速度大小之比v :v :v 。
A B C
(2)A、B、C三点的角速度之比 : : 。
A B C
(3)A、B、C三点的向心加速度大ω小之ω比aω:a :a 。
A B C考点二 圆周运动中的动力学分析
1.向心力的来源
向心力是按力的作用效果命名的,可以是重力、弹力、摩擦力等各种力,也可以是几个力的合力或
某个力的分力,因此在受力分析中要避免再另外添加一个向心力.
2.向心力的确定
(1)确定圆周运动的轨道所在的平面,确定圆心的位置.
(2)分析物体的受力情况,找出所有的力沿半径方向指向圆心的合力,就是向心力.
3.向心力的公式
F=ma =m= mω 2 r =mr= mr 4π 2 f 2
n n
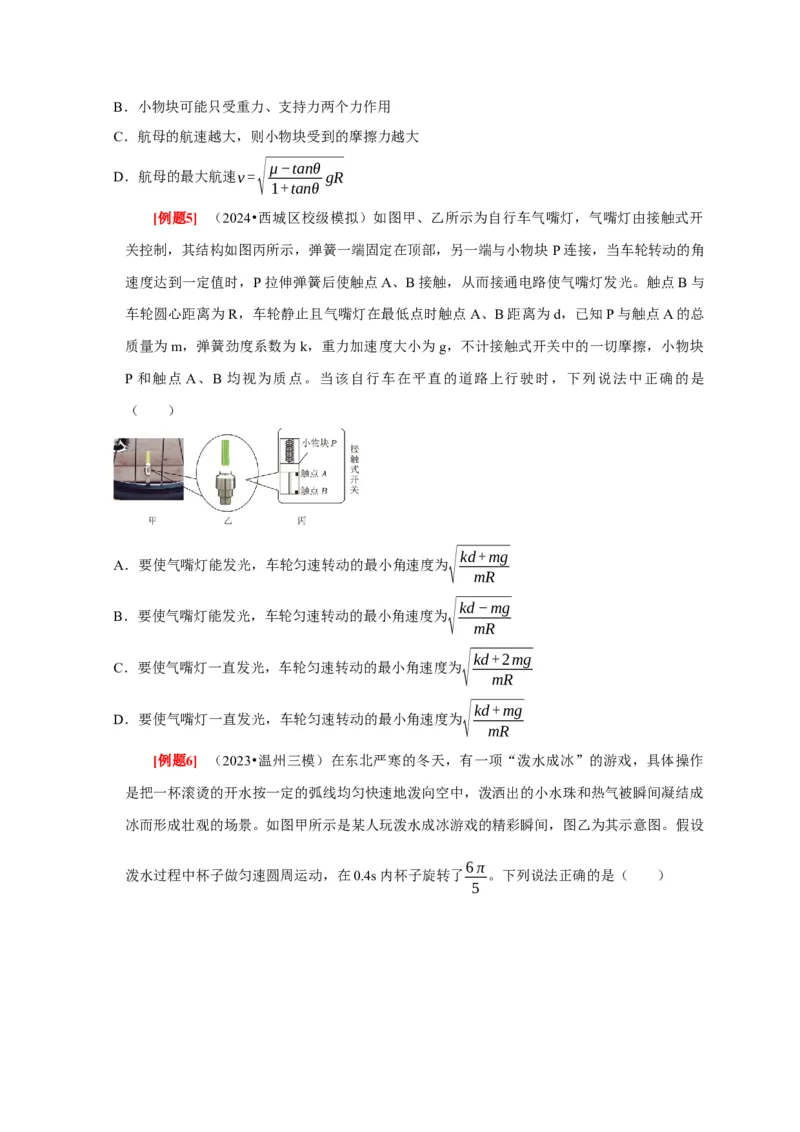
[例题4] (2024•新郑市校级三模)如图甲所示,一艘正在进行顺时针急转弯训练的航母,
运动轨迹可视作半径为R的水平圆周。航母在圆周运动中,船身发生了向外侧倾斜,且甲板法
线与竖直方向夹角为 ,船体后视简图如图乙所示。一质量为m的小物块放在甲板上,与甲板
始终保持相对静止,两θ 者之间的动摩擦因数为 ( >tan )。假设航母的运动半径R、夹角
不随航速改变,最大静摩擦力等于滑动摩擦力。μ下μ列说法θ正确的是( ) θ
A.航母对小物块的支持力F =mgcos
N
θB.小物块可能只受重力、支持力两个力作用
C.航母的航速越大,则小物块受到的摩擦力越大
√μ−tanθ
D.航母的最大航速v= gR
1+tanθ
[例题5] (2024•西城区校级模拟)如图甲、乙所示为自行车气嘴灯,气嘴灯由接触式开
关控制,其结构如图丙所示,弹簧一端固定在顶部,另一端与小物块 P连接,当车轮转动的角
速度达到一定值时,P拉伸弹簧后使触点A、B接触,从而接通电路使气嘴灯发光。触点B与
车轮圆心距离为R,车轮静止且气嘴灯在最低点时触点A、B距离为d,已知P与触点A的总
质量为m,弹簧劲度系数为k,重力加速度大小为g,不计接触式开关中的一切摩擦,小物块
P 和触点 A、B 均视为质点。当该自行车在平直的道路上行驶时,下列说法中正确的是
( )
√kd+mg
A.要使气嘴灯能发光,车轮匀速转动的最小角速度为
mR
√kd−mg
B.要使气嘴灯能发光,车轮匀速转动的最小角速度为
mR
√kd+2mg
C.要使气嘴灯一直发光,车轮匀速转动的最小角速度为
mR
√kd+mg
D.要使气嘴灯一直发光,车轮匀速转动的最小角速度为
mR
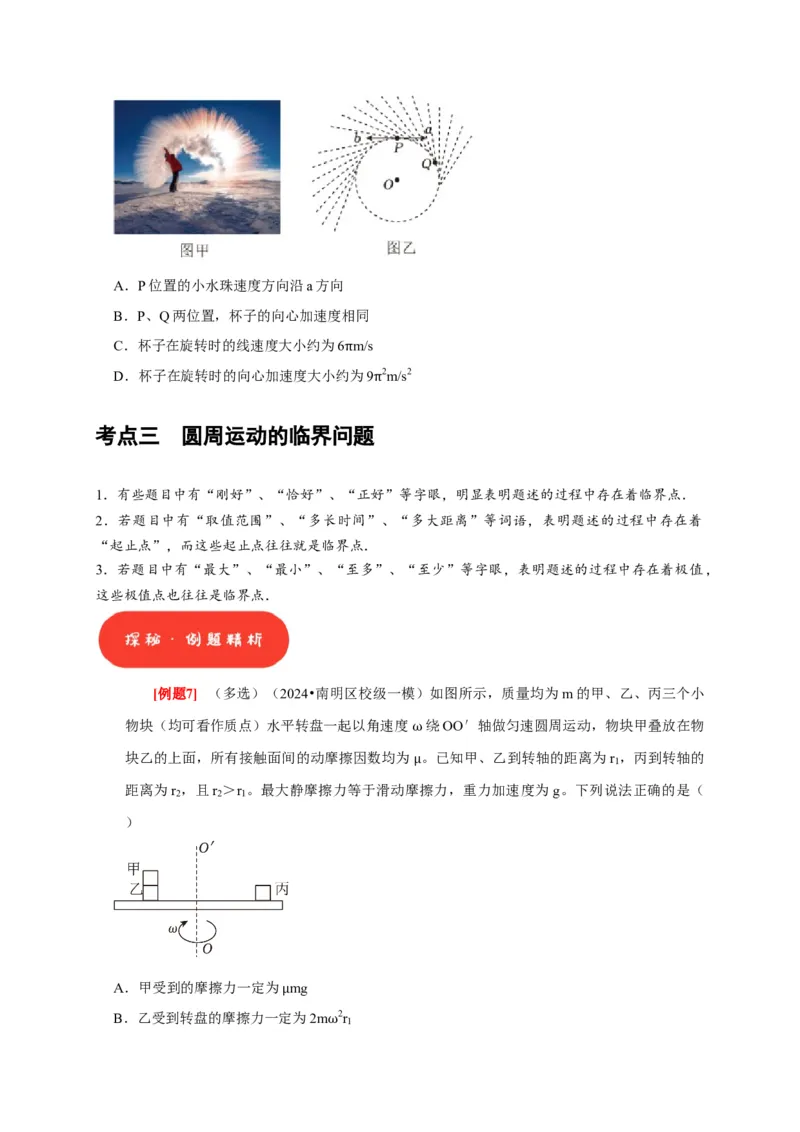
[例题6] (2023•温州三模)在东北严寒的冬天,有一项“泼水成冰”的游戏,具体操作
是把一杯滚烫的开水按一定的弧线均匀快速地泼向空中,泼洒出的小水珠和热气被瞬间凝结成
冰而形成壮观的场景。如图甲所示是某人玩泼水成冰游戏的精彩瞬间,图乙为其示意图。假设
6π
泼水过程中杯子做匀速圆周运动,在0.4s内杯子旋转了 。下列说法正确的是( )
5A.P位置的小水珠速度方向沿a方向
B.P、Q两位置,杯子的向心加速度相同
C.杯子在旋转时的线速度大小约为6 m/s
D.杯子在旋转时的向心加速度大小约π为9 2m/s2
π
考点三 圆周运动的临界问题
1.有些题目中有“刚好”、“恰好”、“正好”等字眼,明显表明题述的过程中存在着临界点.
2.若题目中有“取值范围”、“多长时间”、“多大距离”等词语,表明题述的过程中存在着
“起止点”,而这些起止点往往就是临界点.
3.若题目中有“最大”、“最小”、“至多”、“至少”等字眼,表明题述的过程中存在着极值,
这些极值点也往往是临界点.
[例题7] (多选)(2024•南明区校级一模)如图所示,质量均为m的甲、乙、丙三个小
物块(均可看作质点)水平转盘一起以角速度 绕OO′轴做匀速圆周运动,物块甲叠放在物
块乙的上面,所有接触面间的动摩擦因数均为ω。已知甲、乙到转轴的距离为r ,丙到转轴的
1
距离为r ,且r >r 。最大静摩擦力等于滑动摩μ擦力,重力加速度为g。下列说法正确的是(
2 2 1
)
A.甲受到的摩擦力一定为 mg
B.乙受到转盘的摩擦力一定μ为2m 2r
1
ωC.若角速度增大,丙先达到滑动的临界点
D.若角速度增大,甲先达到滑动的临界点
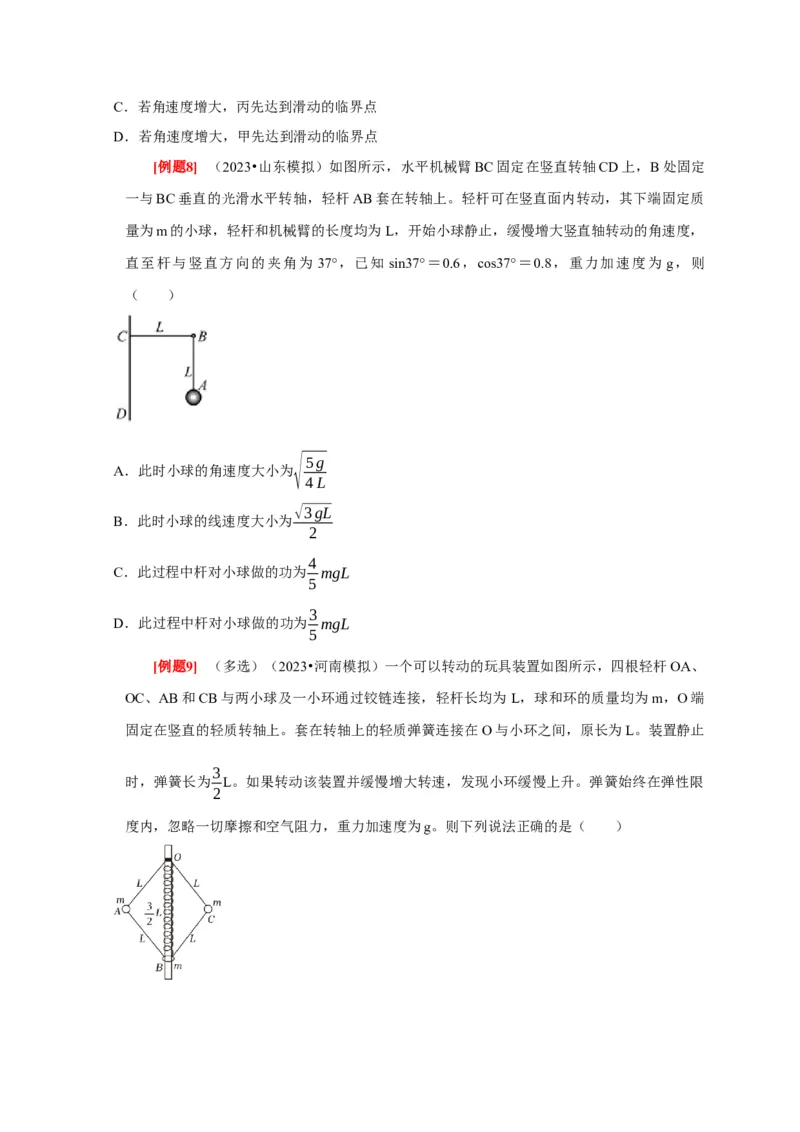
[例题8] (2023•山东模拟)如图所示,水平机械臂BC固定在竖直转轴CD上,B处固定
一与BC垂直的光滑水平转轴,轻杆AB套在转轴上。轻杆可在竖直面内转动,其下端固定质
量为m的小球,轻杆和机械臂的长度均为L,开始小球静止,缓慢增大竖直轴转动的角速度,
直至杆与竖直方向的夹角为 37°,已知 sin37°=0.6,cos37°=0.8,重力加速度为 g,则
( )
√5g
A.此时小球的角速度大小为
4L
√3gL
B.此时小球的线速度大小为
2
4
C.此过程中杆对小球做的功为 mgL
5
3
D.此过程中杆对小球做的功为 mgL
5
[例题9] (多选)(2023•河南模拟)一个可以转动的玩具装置如图所示,四根轻杆OA、
OC、AB和CB与两小球及一小环通过铰链连接,轻杆长均为 L,球和环的质量均为m,O端
固定在竖直的轻质转轴上。套在转轴上的轻质弹簧连接在 O与小环之间,原长为L。装置静止
3
时,弹簧长为 L。如果转动该装置并缓慢增大转速,发现小环缓慢上升。弹簧始终在弹性限
2
度内,忽略一切摩擦和空气阻力,重力加速度为g。则下列说法正确的是( )4mg
A.弹簧的劲度系数k=
L
2mg
B.弹簧的劲度系数为k=
L
√8g
C.装置转动的角速度为 时,AB杆中弹力为零
5L
√6g
D.装置转动的角速度为 时,AB杆中弹力为零
5L
考点四 竖直平面内圆周运动绳、杆模型
1.在竖直平面内做圆周运动的物体,按运动到轨道最高点时的受力情况可分为两类:一是无支撑
(如球与绳连接、沿内轨道运动的过山车等),称为“绳(环)约束模型”,二是有支撑(如球与杆连接、
在弯管内的运动等),称为“杆(管)约束模型”.
2.绳、杆模型涉及的临界问题
绳模型 杆模型
常见类型
均是没有支撑的小球
均是有支撑的小球
过最高点的 由mg=m得
由小球恰能做圆周运动得v =0
临
临界条件 v =
临
(1)当v=0时,F =mg,F 为支持力,沿
N N
(1)过最高点时,v≥,F +mg
N
半径背离圆心
=m,绳、圆轨道对球产生弹
(2)当0时,F +mg=m,F 指向圆心并
N N
圆轨道
随v的增大而增大
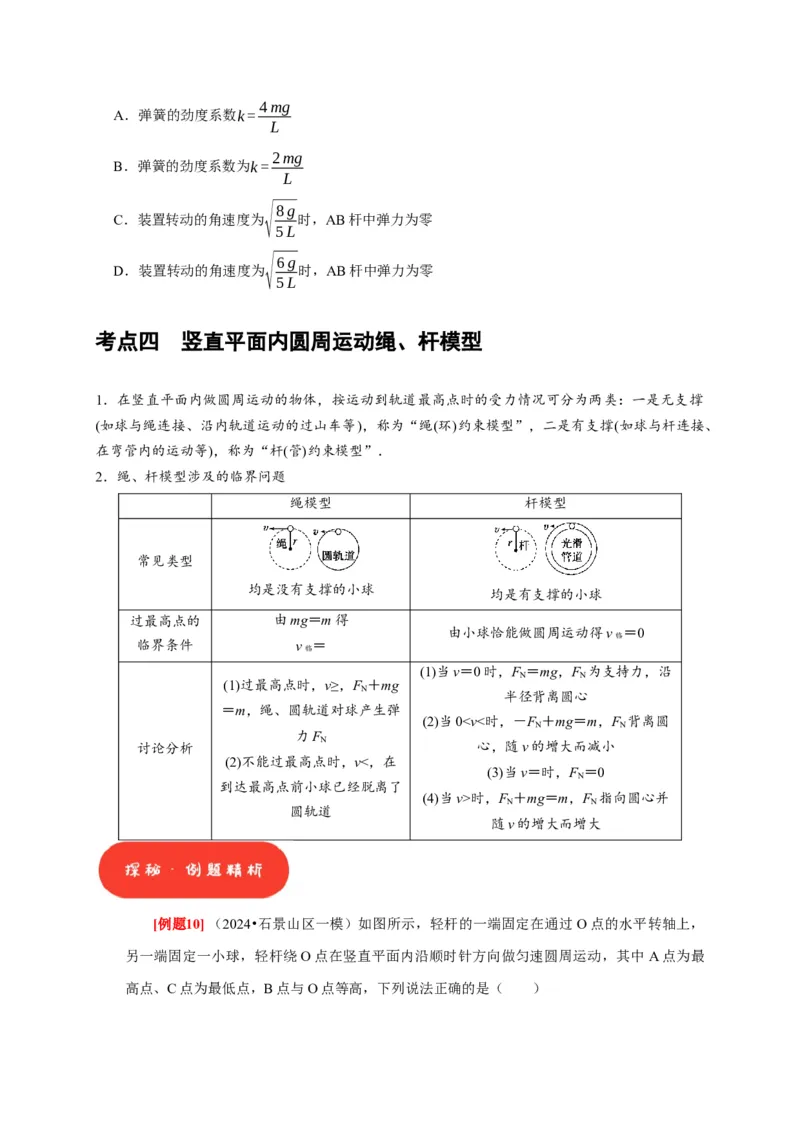
[例题10](2024•石景山区一模)如图所示,轻杆的一端固定在通过 O点的水平转轴上,
另一端固定一小球,轻杆绕O点在竖直平面内沿顺时针方向做匀速圆周运动,其中 A点为最
高点、C点为最低点,B点与O点等高,下列说法正确的是( )A.小球经过A点时,所受杆的作用力一定竖直向下
B.小球经过B点时,所受杆的作用力沿着BO方向
C.从A点到C点的过程,杆对小球的作用力不做功
D.从A点到C点的过程,小球重力的功率先增大后减小
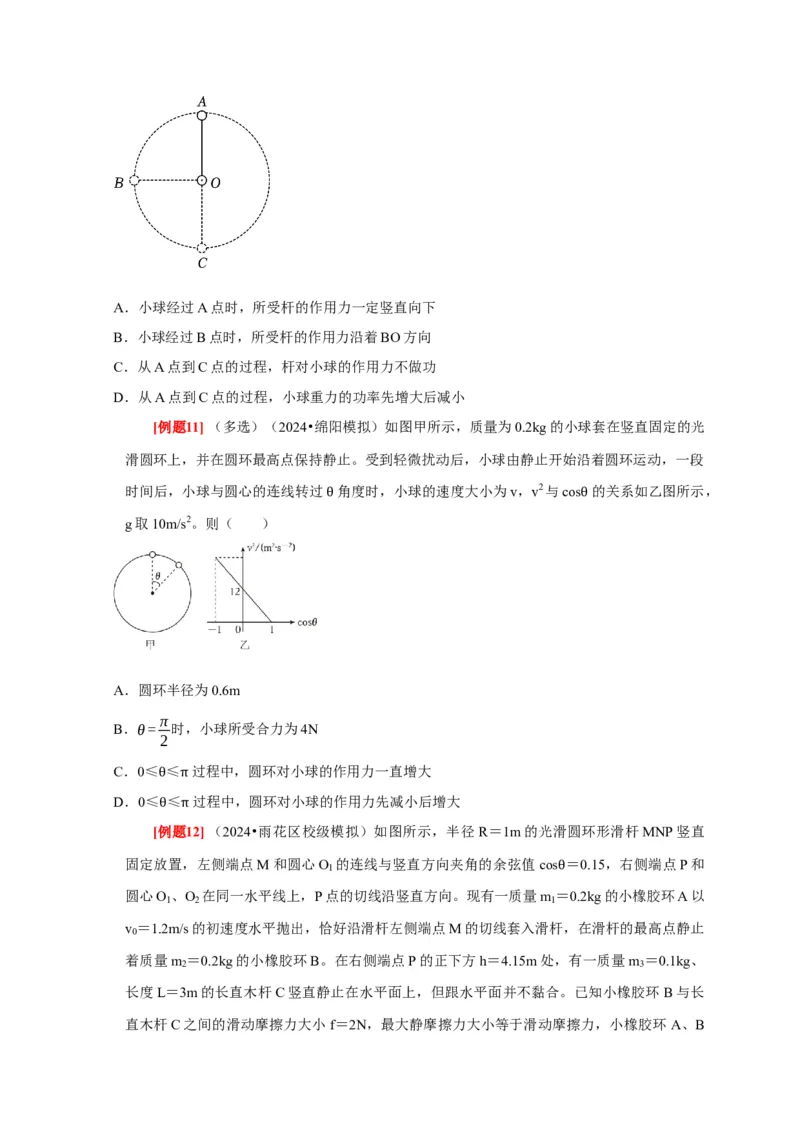
[例题11] (多选)(2024•绵阳模拟)如图甲所示,质量为0.2kg的小球套在竖直固定的光
滑圆环上,并在圆环最高点保持静止。受到轻微扰动后,小球由静止开始沿着圆环运动,一段
时间后,小球与圆心的连线转过 角度时,小球的速度大小为v,v2与cos 的关系如乙图所示,
g取10m/s2。则( ) θ θ
A.圆环半径为0.6m
π
B.θ= 时,小球所受合力为4N
2
C.0≤ ≤ 过程中,圆环对小球的作用力一直增大
D.0≤θ≤π过程中,圆环对小球的作用力先减小后增大
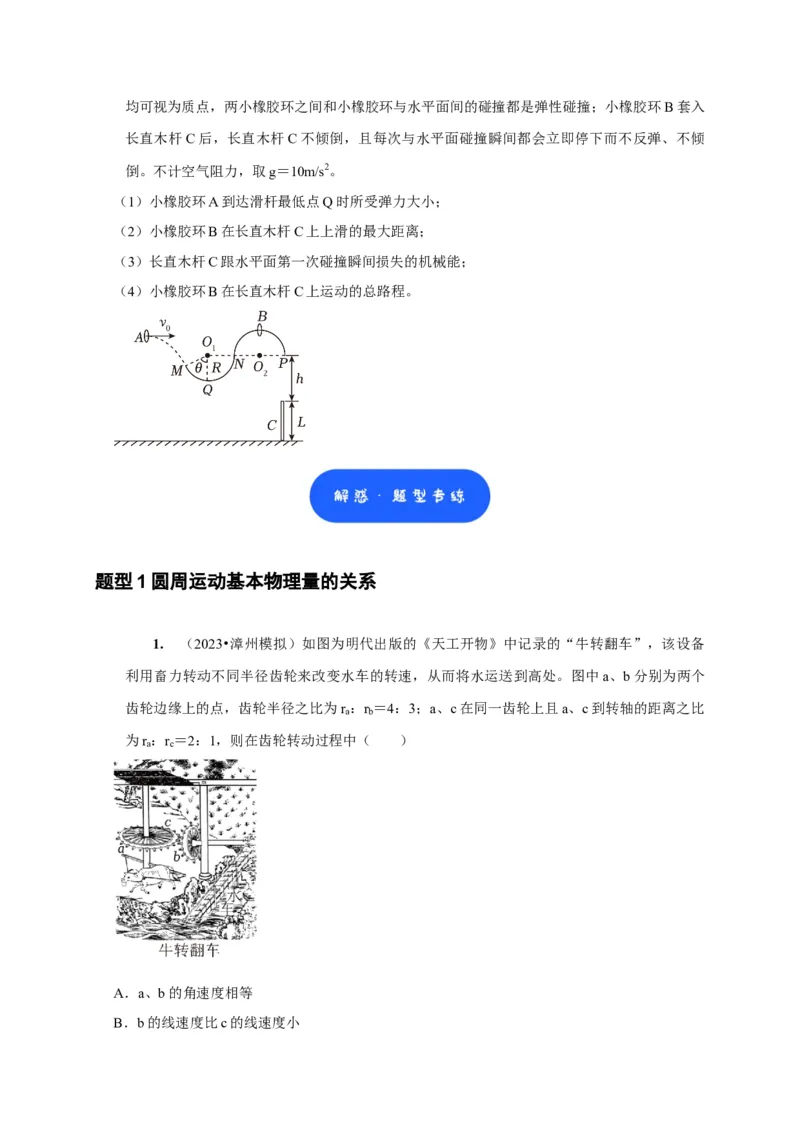
[例θ 题π12](2024•雨花区校级模拟)如图所示,半径R=1m的光滑圆环形滑杆MNP竖直
固定放置,左侧端点M和圆心O 的连线与竖直方向夹角的余弦值cos =0.15,右侧端点P和
1
圆心O 、O 在同一水平线上,P点的切线沿竖直方向。现有一质量m =θ0.2kg的小橡胶环A以
1 2 1
v =1.2m/s的初速度水平抛出,恰好沿滑杆左侧端点M的切线套入滑杆,在滑杆的最高点静止
0
着质量m =0.2kg的小橡胶环B。在右侧端点P的正下方h=4.15m处,有一质量m =0.1kg、
2 3
长度L=3m的长直木杆C竖直静止在水平面上,但跟水平面并不黏合。已知小橡胶环 B与长
直木杆C之间的滑动摩擦力大小f=2N,最大静摩擦力大小等于滑动摩擦力,小橡胶环 A、B均可视为质点,两小橡胶环之间和小橡胶环与水平面间的碰撞都是弹性碰撞;小橡胶环B套入
长直木杆C后,长直木杆C不倾倒,且每次与水平面碰撞瞬间都会立即停下而不反弹、不倾
倒。不计空气阻力,取g=10m/s2。
(1)小橡胶环A到达滑杆最低点Q时所受弹力大小;
(2)小橡胶环B在长直木杆C上上滑的最大距离;
(3)长直木杆C跟水平面第一次碰撞瞬间损失的机械能;
(4)小橡胶环B在长直木杆C上运动的总路程。
题型1圆周运动基本物理量的关系
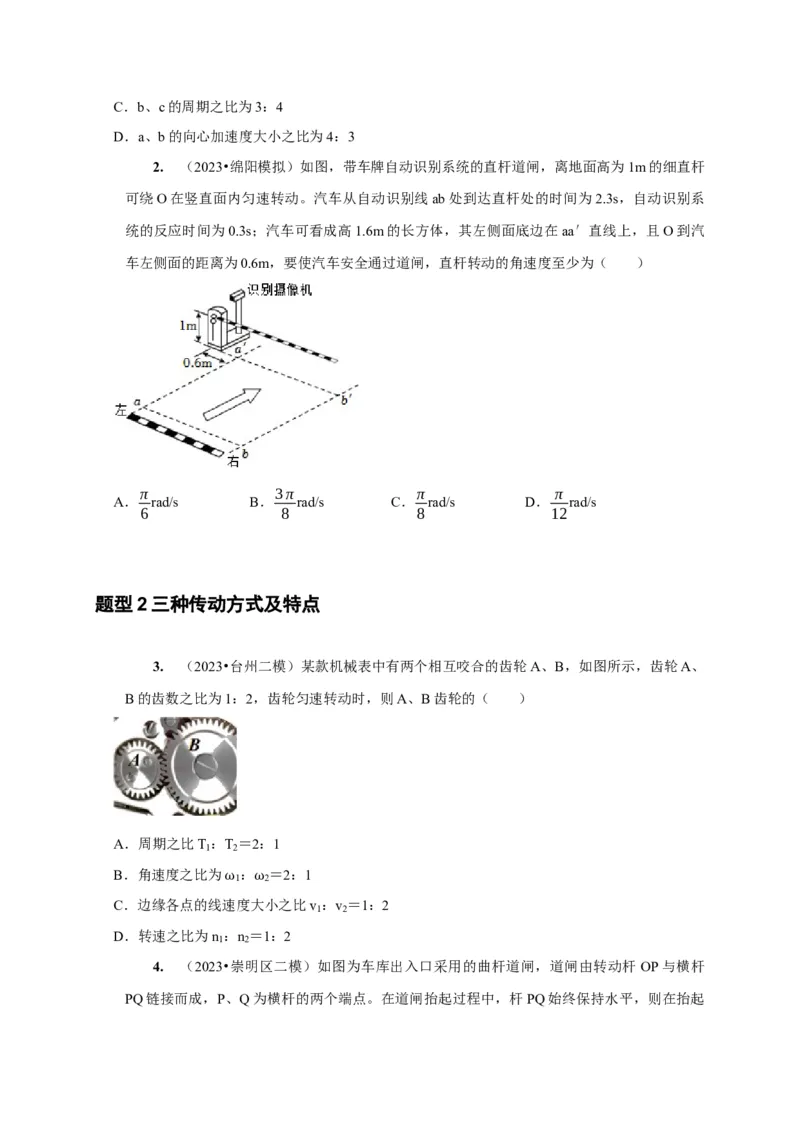
1. (2023•漳州模拟)如图为明代出版的《天工开物》中记录的“牛转翻车”,该设备
利用畜力转动不同半径齿轮来改变水车的转速,从而将水运送到高处。图中a、b分别为两个
齿轮边缘上的点,齿轮半径之比为r :r =4:3;a、c在同一齿轮上且a、c到转轴的距离之比
a b
为r :r =2:1,则在齿轮转动过程中( )
a c
A.a、b的角速度相等
B.b的线速度比c的线速度小C.b、c的周期之比为3:4
D.a、b的向心加速度大小之比为4:3
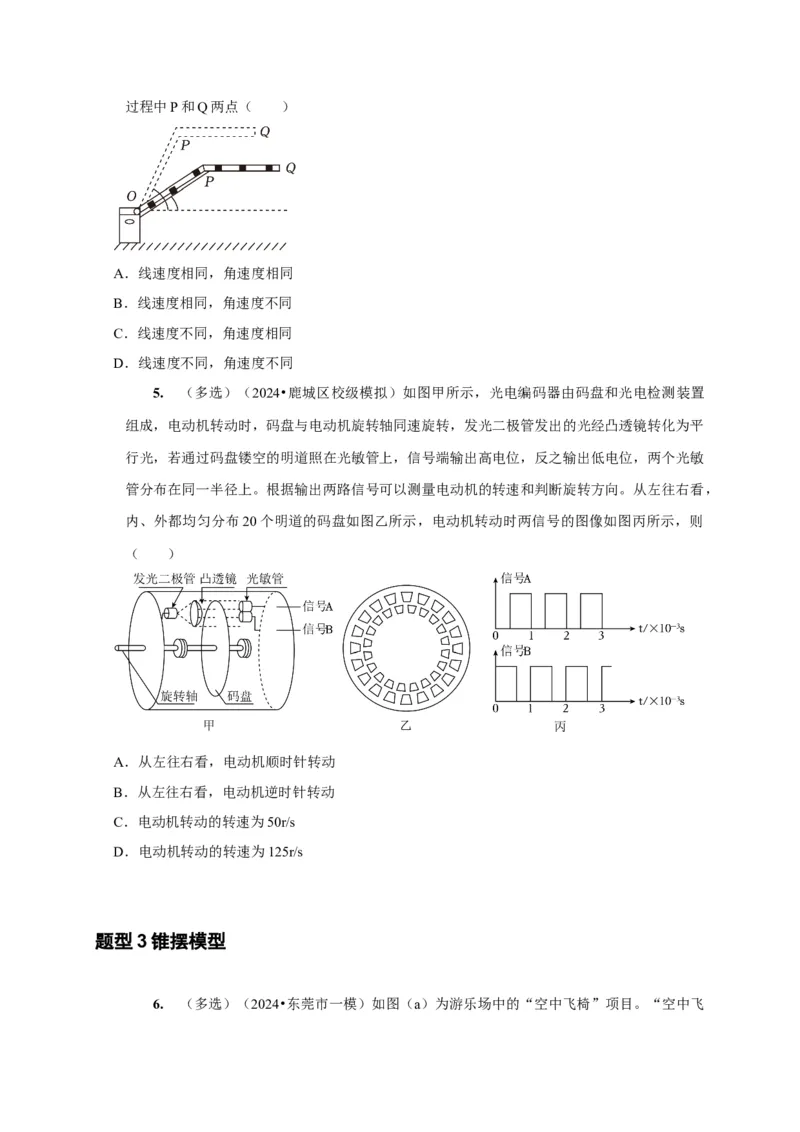
2. (2023•绵阳模拟)如图,带车牌自动识别系统的直杆道闸,离地面高为1m的细直杆
可绕O在竖直面内匀速转动。汽车从自动识别线ab处到达直杆处的时间为2.3s,自动识别系
统的反应时间为0.3s;汽车可看成高1.6m的长方体,其左侧面底边在aa′直线上,且O到汽
车左侧面的距离为0.6m,要使汽车安全通过道闸,直杆转动的角速度至少为( )
π 3π π π
A. rad/s B. rad/s C. rad/s D. rad/s
6 8 8 12
题型2三种传动方式及特点
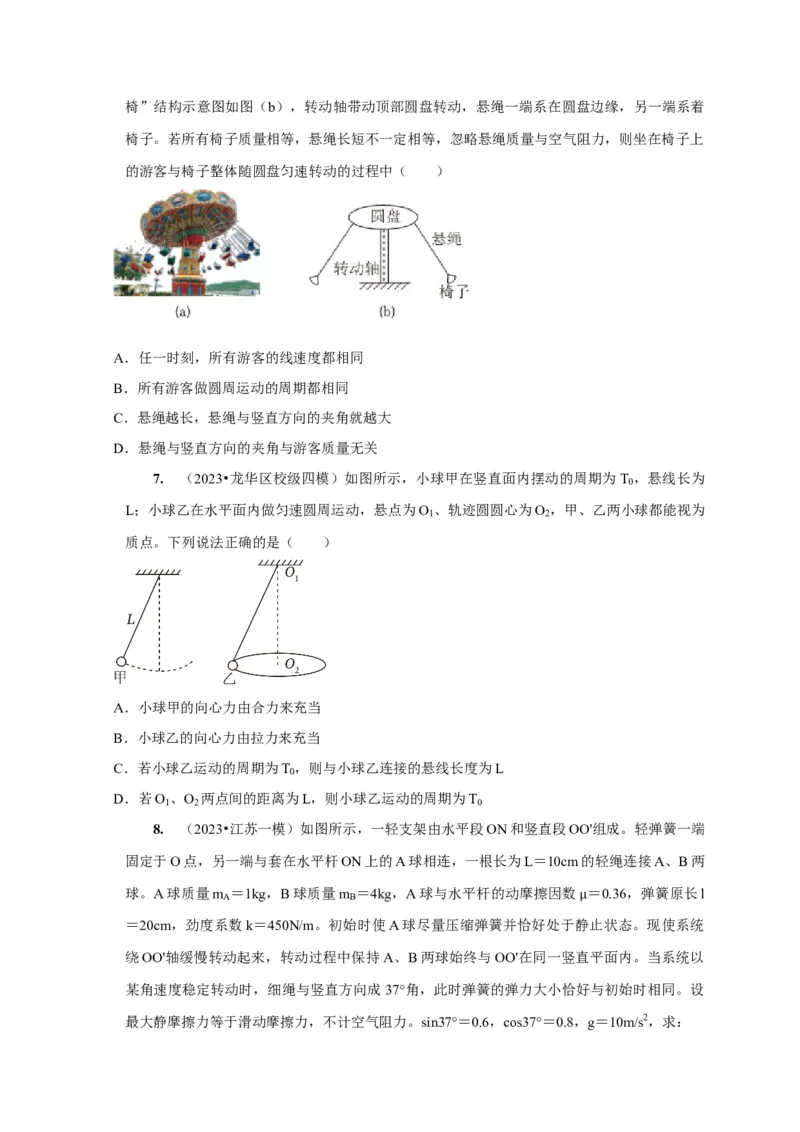
3. (2023•台州二模)某款机械表中有两个相互咬合的齿轮A、B,如图所示,齿轮A、
B的齿数之比为1:2,齿轮匀速转动时,则A、B齿轮的( )
A.周期之比T :T =2:1
1 2
B.角速度之比为 : =2:1
1 2
C.边缘各点的线速ω度大ω小之比v :v =1:2
1 2
D.转速之比为n :n =1:2
1 2
4. (2023•崇明区二模)如图为车库出入口采用的曲杆道闸,道闸由转动杆 OP与横杆
PQ链接而成,P、Q为横杆的两个端点。在道闸抬起过程中,杆PQ始终保持水平,则在抬起过程中P和Q两点( )
A.线速度相同,角速度相同
B.线速度相同,角速度不同
C.线速度不同,角速度相同
D.线速度不同,角速度不同
5. (多选)(2024•鹿城区校级模拟)如图甲所示,光电编码器由码盘和光电检测装置
组成,电动机转动时,码盘与电动机旋转轴同速旋转,发光二极管发出的光经凸透镜转化为平
行光,若通过码盘镂空的明道照在光敏管上,信号端输出高电位,反之输出低电位,两个光敏
管分布在同一半径上。根据输出两路信号可以测量电动机的转速和判断旋转方向。从左往右看,
内、外都均匀分布20个明道的码盘如图乙所示,电动机转动时两信号的图像如图丙所示,则
( )
A.从左往右看,电动机顺时针转动
B.从左往右看,电动机逆时针转动
C.电动机转动的转速为50r/s
D.电动机转动的转速为125r/s
题型3锥摆模型
6. (多选)(2024•东莞市一模)如图(a)为游乐场中的“空中飞椅”项目。“空中飞椅”结构示意图如图(b),转动轴带动顶部圆盘转动,悬绳一端系在圆盘边缘,另一端系着
椅子。若所有椅子质量相等,悬绳长短不一定相等,忽略悬绳质量与空气阻力,则坐在椅子上
的游客与椅子整体随圆盘匀速转动的过程中( )
A.任一时刻,所有游客的线速度都相同
B.所有游客做圆周运动的周期都相同
C.悬绳越长,悬绳与竖直方向的夹角就越大
D.悬绳与竖直方向的夹角与游客质量无关
7. (2023•龙华区校级四模)如图所示,小球甲在竖直面内摆动的周期为T ,悬线长为
0
L;小球乙在水平面内做匀速圆周运动,悬点为O 、轨迹圆圆心为O ,甲、乙两小球都能视为
1 2
质点。下列说法正确的是( )
A.小球甲的向心力由合力来充当
B.小球乙的向心力由拉力来充当
C.若小球乙运动的周期为T ,则与小球乙连接的悬线长度为L
0
D.若O 、O 两点间的距离为L,则小球乙运动的周期为T
1 2 0
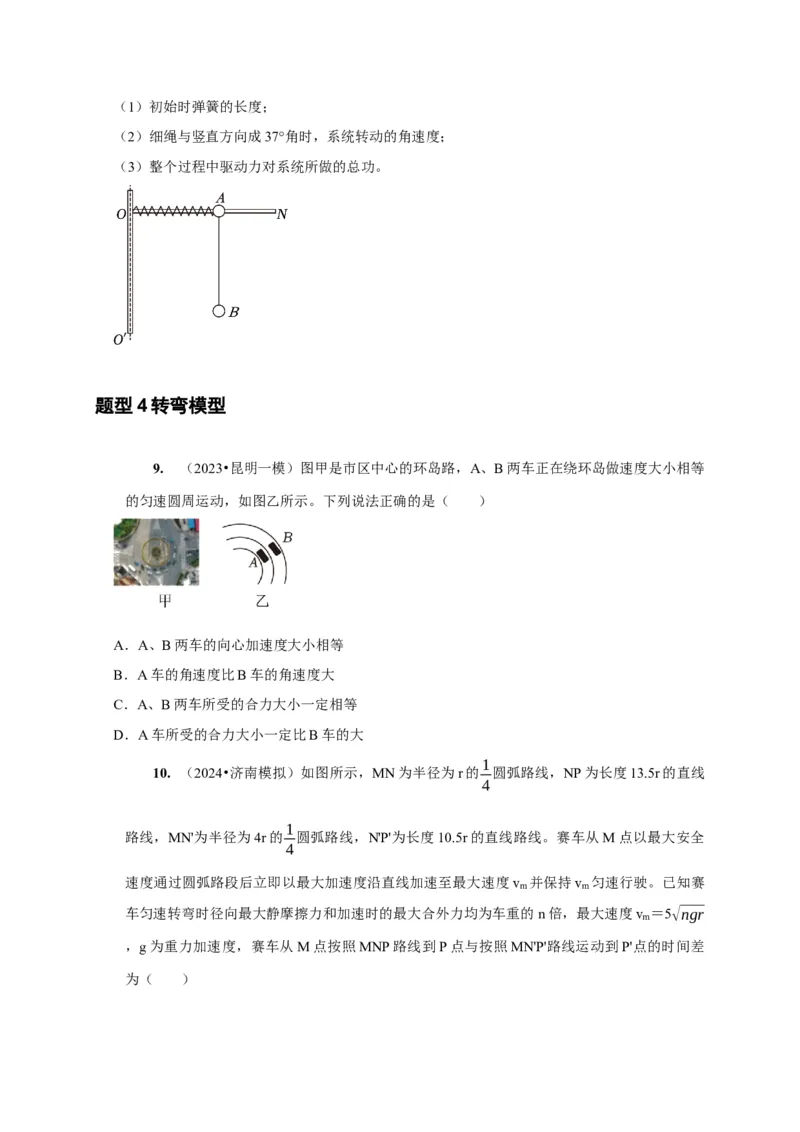
8. (2023•江苏一模)如图所示,一轻支架由水平段ON和竖直段OO'组成。轻弹簧一端
固定于O点,另一端与套在水平杆ON上的A球相连,一根长为L=10cm的轻绳连接A、B两
球。A球质量m =1kg,B球质量m =4kg,A球与水平杆的动摩擦因数 =0.36,弹簧原长l
A B
=20cm,劲度系数k=450N/m。初始时使A球尽量压缩弹簧并恰好处于静μ止状态。现使系统
绕OO'轴缓慢转动起来,转动过程中保持A、B两球始终与OO'在同一竖直平面内。当系统以
某角速度稳定转动时,细绳与竖直方向成37°角,此时弹簧的弹力大小恰好与初始时相同。设
最大静摩擦力等于滑动摩擦力,不计空气阻力。sin37°=0.6,cos37°=0.8,g=10m/s2,求:(1)初始时弹簧的长度;
(2)细绳与竖直方向成37°角时,系统转动的角速度;
(3)整个过程中驱动力对系统所做的总功。
题型4转弯模型
9. (2023•昆明一模)图甲是市区中心的环岛路,A、B两车正在绕环岛做速度大小相等
的匀速圆周运动,如图乙所示。下列说法正确的是( )
A.A、B两车的向心加速度大小相等
B.A车的角速度比B车的角速度大
C.A、B两车所受的合力大小一定相等
D.A车所受的合力大小一定比B车的大
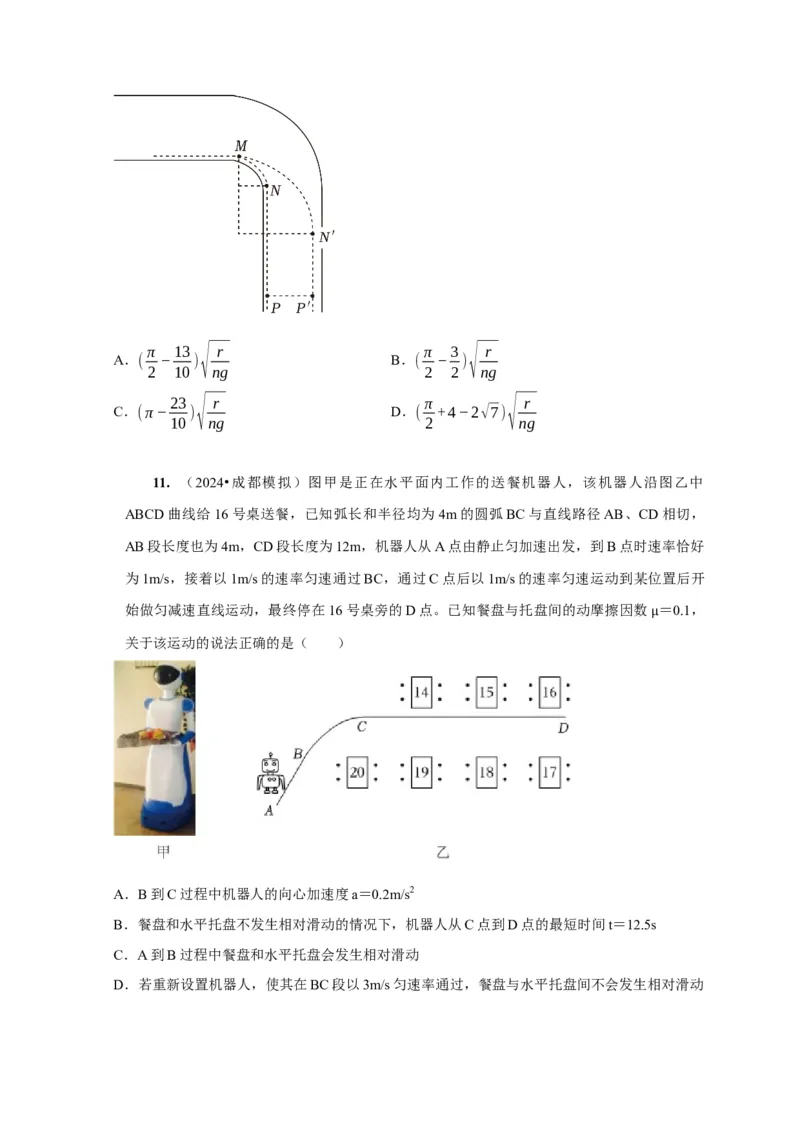
1
10. (2024•济南模拟)如图所示,MN为半径为r的 圆弧路线,NP为长度13.5r的直线
4
1
路线,MN'为半径为4r的 圆弧路线,N'P'为长度10.5r的直线路线。赛车从M点以最大安全
4
速度通过圆弧路段后立即以最大加速度沿直线加速至最大速度v 并保持v 匀速行驶。已知赛
m m
车匀速转弯时径向最大静摩擦力和加速时的最大合外力均为车重的n倍,最大速度v =5√ngr
m
,g为重力加速度,赛车从M点按照MNP路线到P点与按照MN'P'路线运动到P'点的时间差
为( )π 13 √ r π 3 √ r
A.( − ) B.( − )
2 10 ng 2 2 ng
23 √ r π √ r
C.(π− ) D.( +4−2√7)
10 ng 2 ng
11. (2024•成都模拟)图甲是正在水平面内工作的送餐机器人,该机器人沿图乙中
ABCD曲线给16号桌送餐,已知弧长和半径均为4m的圆弧BC与直线路径AB、CD相切,
AB段长度也为4m,CD段长度为12m,机器人从A点由静止匀加速出发,到B点时速率恰好
为1m/s,接着以1m/s的速率匀速通过BC,通过C点后以1m/s的速率匀速运动到某位置后开
始做匀减速直线运动,最终停在16号桌旁的D点。已知餐盘与托盘间的动摩擦因数 =0.1,
关于该运动的说法正确的是( ) μ
A.B到C过程中机器人的向心加速度a=0.2m/s2
B.餐盘和水平托盘不发生相对滑动的情况下,机器人从C点到D点的最短时间t=12.5s
C.A到B过程中餐盘和水平托盘会发生相对滑动
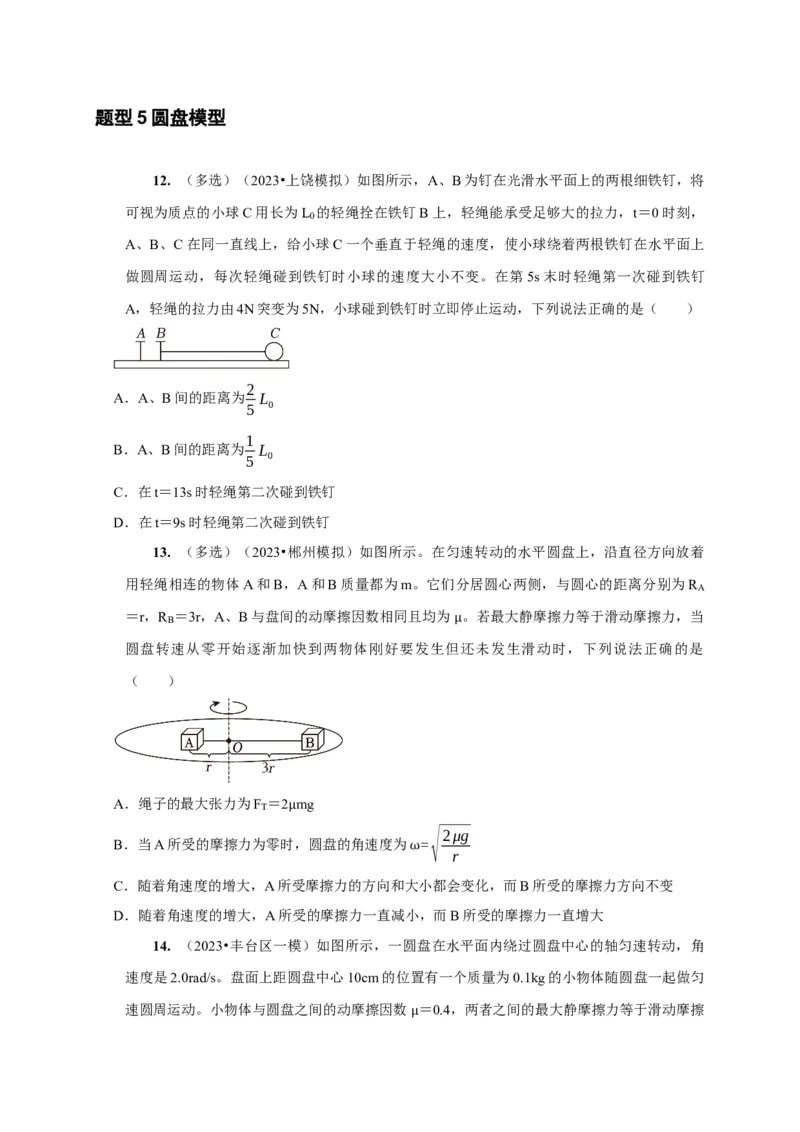
D.若重新设置机器人,使其在BC段以3m/s匀速率通过,餐盘与水平托盘间不会发生相对滑动题型5圆盘模型
12. (多选)(2023•上饶模拟)如图所示,A、B为钉在光滑水平面上的两根细铁钉,将
可视为质点的小球C用长为L 的轻绳拴在铁钉B上,轻绳能承受足够大的拉力,t=0时刻,
0
A、B、C在同一直线上,给小球C一个垂直于轻绳的速度,使小球绕着两根铁钉在水平面上
做圆周运动,每次轻绳碰到铁钉时小球的速度大小不变。在第5s末时轻绳第一次碰到铁钉
A,轻绳的拉力由4N突变为5N,小球碰到铁钉时立即停止运动,下列说法正确的是( )
2
A.A、B间的距离为 L
5 0
1
B.A、B间的距离为 L
5 0
C.在t=13s时轻绳第二次碰到铁钉
D.在t=9s时轻绳第二次碰到铁钉
13. (多选)(2023•郴州模拟)如图所示。在匀速转动的水平圆盘上,沿直径方向放着
用轻绳相连的物体A和B,A和B质量都为m。它们分居圆心两侧,与圆心的距离分别为R
A
=r,R =3r,A、B与盘间的动摩擦因数相同且均为 。若最大静摩擦力等于滑动摩擦力,当
B
圆盘转速从零开始逐渐加快到两物体刚好要发生但μ还未发生滑动时,下列说法正确的是
( )
A.绳子的最大张力为F =2 mg
T
μ √2μg
B.当A所受的摩擦力为零时,圆盘的角速度为 =
r
ω
C.随着角速度的增大,A所受摩擦力的方向和大小都会变化,而B所受的摩擦力方向不变
D.随着角速度的增大,A所受的摩擦力一直减小,而B所受的摩擦力一直增大
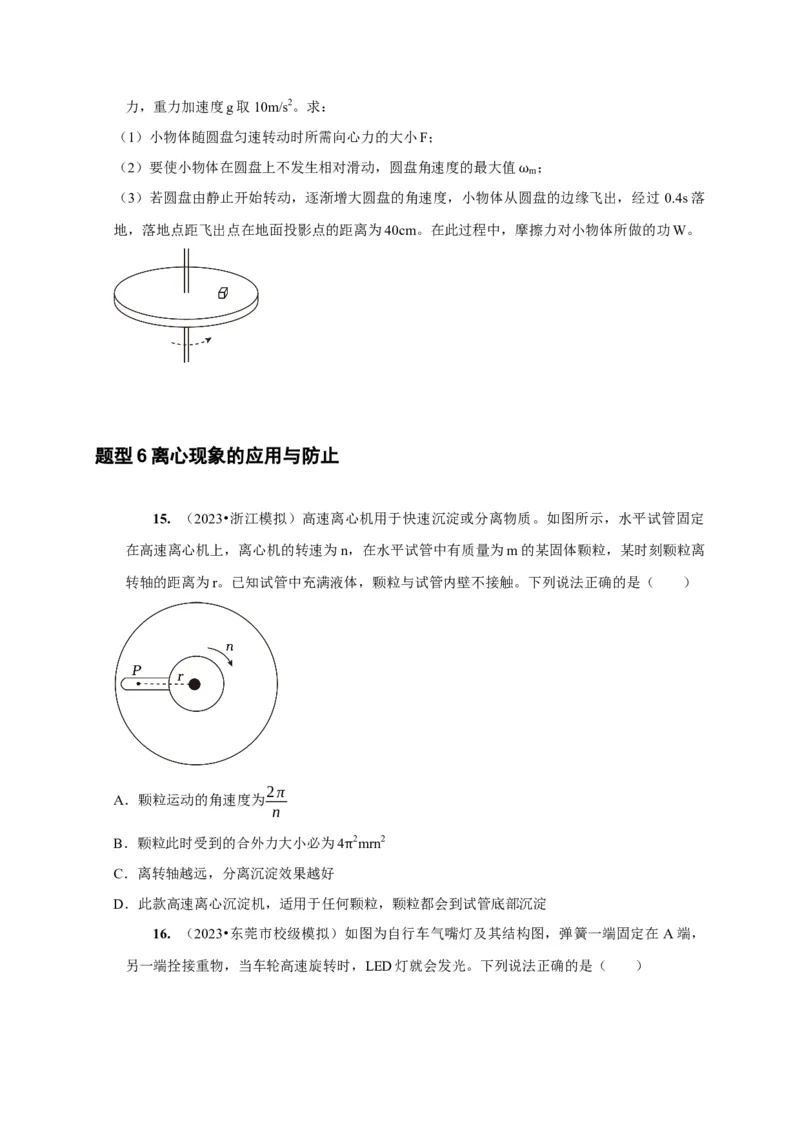
14. (2023•丰台区一模)如图所示,一圆盘在水平面内绕过圆盘中心的轴匀速转动,角
速度是2.0rad/s。盘面上距圆盘中心10cm的位置有一个质量为0.1kg的小物体随圆盘一起做匀
速圆周运动。小物体与圆盘之间的动摩擦因数 =0.4,两者之间的最大静摩擦力等于滑动摩擦
μ力,重力加速度g取10m/s2。求:
(1)小物体随圆盘匀速转动时所需向心力的大小F;
(2)要使小物体在圆盘上不发生相对滑动,圆盘角速度的最大值 ;
m
(3)若圆盘由静止开始转动,逐渐增大圆盘的角速度,小物体从圆ω盘的边缘飞出,经过 0.4s落
地,落地点距飞出点在地面投影点的距离为40cm。在此过程中,摩擦力对小物体所做的功W。
题型6离心现象的应用与防止
15. (2023•浙江模拟)高速离心机用于快速沉淀或分离物质。如图所示,水平试管固定
在高速离心机上,离心机的转速为n,在水平试管中有质量为m的某固体颗粒,某时刻颗粒离
转轴的距离为r。已知试管中充满液体,颗粒与试管内壁不接触。下列说法正确的是( )
2π
A.颗粒运动的角速度为
n
B.颗粒此时受到的合外力大小必为4 2mrn2
C.离转轴越远,分离沉淀效果越好 π
D.此款高速离心沉淀机,适用于任何颗粒,颗粒都会到试管底部沉淀
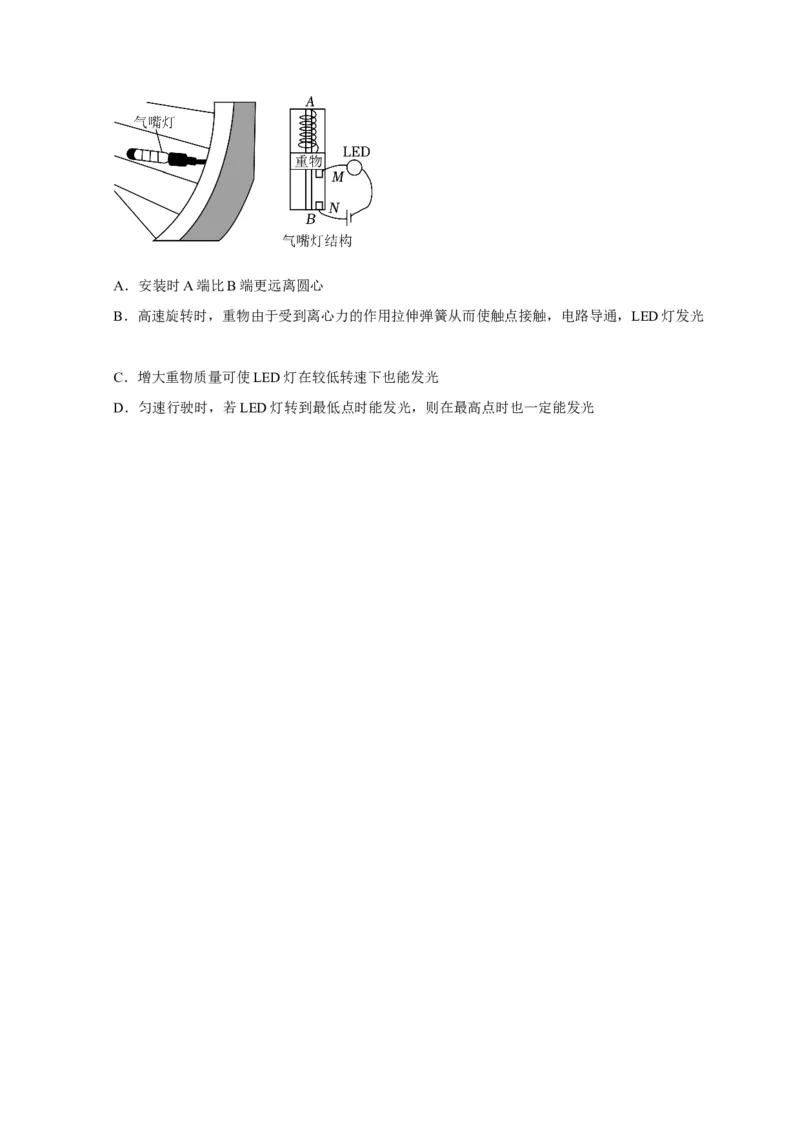
16. (2023•东莞市校级模拟)如图为自行车气嘴灯及其结构图,弹簧一端固定在 A端,
另一端拴接重物,当车轮高速旋转时,LED灯就会发光。下列说法正确的是( )A.安装时A端比B端更远离圆心
B.高速旋转时,重物由于受到离心力的作用拉伸弹簧从而使触点接触,电路导通,LED灯发光
C.增大重物质量可使LED灯在较低转速下也能发光
D.匀速行驶时,若LED灯转到最低点时能发光,则在最高点时也一定能发光
