文档内容
第 37 讲 物理实验(二)
1、掌握并会利用实验的原理验证机械能守恒定律,并会做出必要的误差分析。
2、理解和掌握用单摆测量重力加速度的大小实验原理,并会做出必要的误差分析。
3、能够在原型实验基础上,通过对实验的改进或者创新,做出同类探究。
实验 5 探究功与物体速度变化的关系
【实验原理】
探究功与速度变化的关系,可通过改变力对物体做的功,测出力对物体做不同的功时物体的速
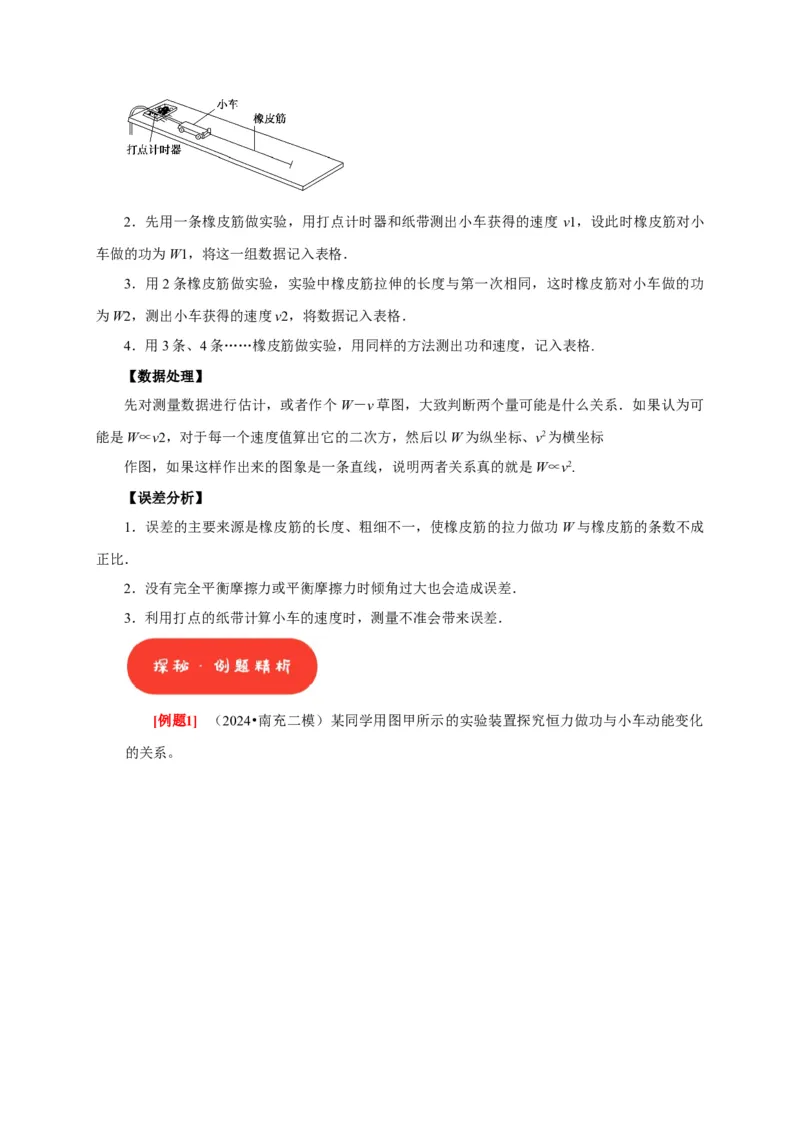
度,为简化实验可将物体初速度设置为零,可用图所示的装置进行实验,通过增加橡皮筋的条数使
橡皮筋对小车做的功成倍增加,再通过打点计时器和纸带来测量每次实验后小车的末速度v.
【实验器材】
小车(前面带小钩)、100 g~200 g砝码、长木板(两侧适当的对称位置钉两个铁钉),打点计时器
及纸带、学生电源及导线(使用电火花计时器则不用学生电源)、5~6条等长的橡皮筋、刻度尺.
【实验步骤】
1.按如图所示将实验仪器安装好,同时平衡摩擦力.2.先用一条橡皮筋做实验,用打点计时器和纸带测出小车获得的速度 v1,设此时橡皮筋对小
车做的功为W1,将这一组数据记入表格.
3.用2条橡皮筋做实验,实验中橡皮筋拉伸的长度与第一次相同,这时橡皮筋对小车做的功
为W2,测出小车获得的速度v2,将数据记入表格.
4.用3条、4条……橡皮筋做实验,用同样的方法测出功和速度,记入表格.
【数据处理】
先对测量数据进行估计,或者作个W-v草图,大致判断两个量可能是什么关系.如果认为可
能是W∝v2,对于每一个速度值算出它的二次方,然后以W为纵坐标、v2为横坐标
作图,如果这样作出来的图象是一条直线,说明两者关系真的就是W∝v2.
【误差分析】
1.误差的主要来源是橡皮筋的长度、粗细不一,使橡皮筋的拉力做功 W与橡皮筋的条数不成
正比.
2.没有完全平衡摩擦力或平衡摩擦力时倾角过大也会造成误差.
3.利用打点的纸带计算小车的速度时,测量不准会带来误差.
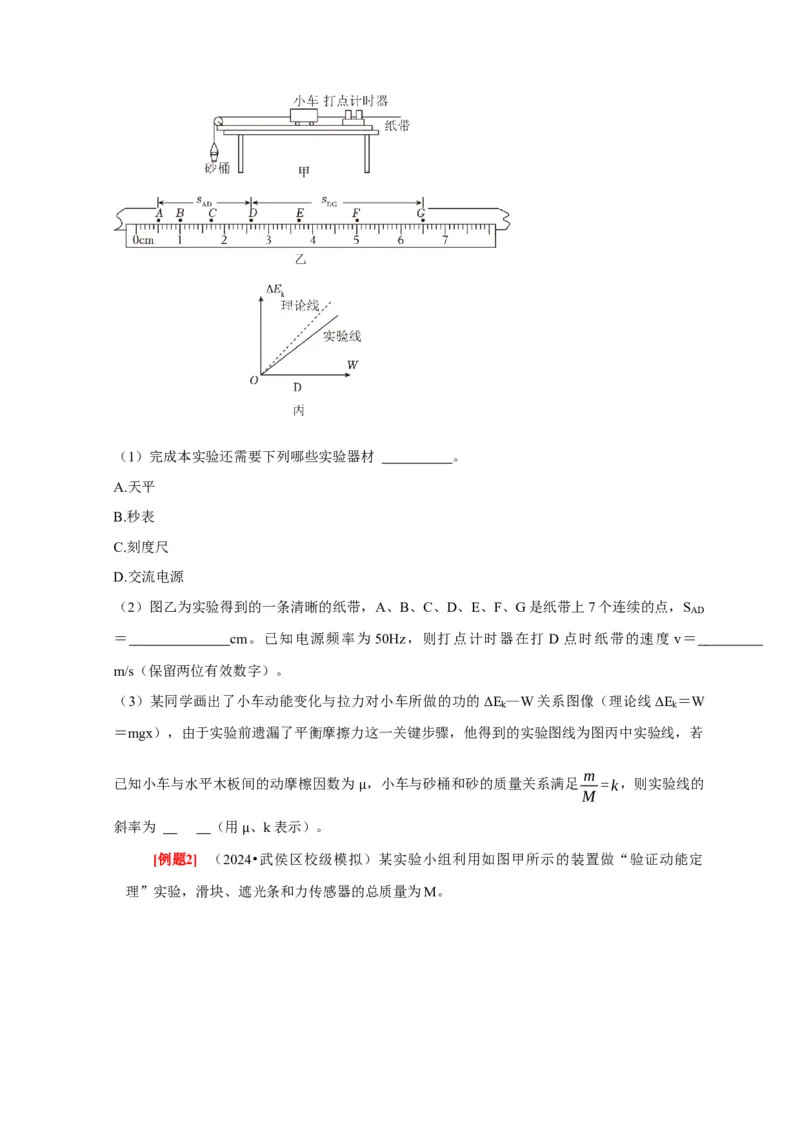
[例题1] (2024•南充二模)某同学用图甲所示的实验装置探究恒力做功与小车动能变化
的关系。(1)完成本实验还需要下列哪些实验器材 。
A.天平
B.秒表
C.刻度尺
D.交流电源
(2)图乙为实验得到的一条清晰的纸带,A、B、C、D、E、F、G是纸带上7个连续的点,S
AD
= cm。已知电源频率为 50Hz,则打点计时器在打 D 点时纸带的速度 v=
m/s(保留两位有效数字)。
(3)某同学画出了小车动能变化与拉力对小车所做的功的ΔE —W关系图像(理论线ΔE =W
k k
=mgx),由于实验前遗漏了平衡摩擦力这一关键步骤,他得到的实验图线为图丙中实验线,若
m
已知小车与水平木板间的动摩檫因数为 ,小车与砂桶和砂的质量关系满足 =k,则实验线的
M
μ
斜率为 (用 、k表示)。
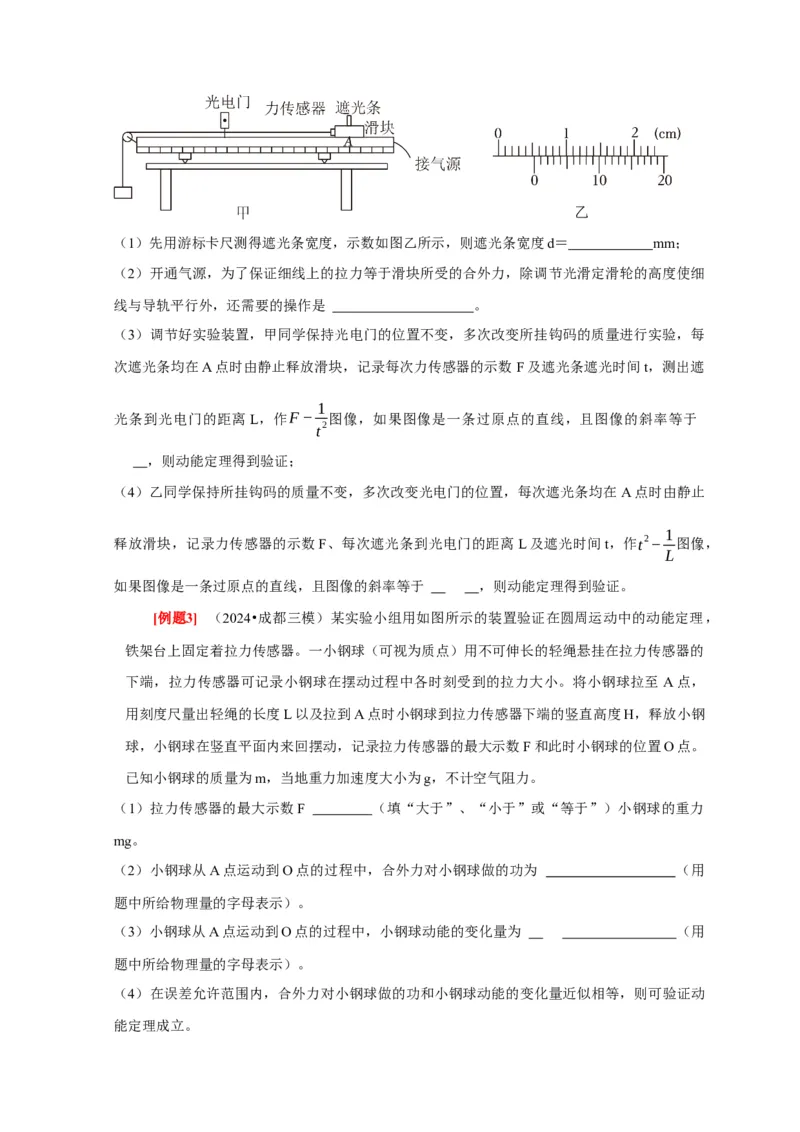
[例题2] (202μ4•武侯区校级模拟)某实验小组利用如图甲所示的装置做“验证动能定
理”实验,滑块、遮光条和力传感器的总质量为M。(1)先用游标卡尺测得遮光条宽度,示数如图乙所示,则遮光条宽度d= mm;
(2)开通气源,为了保证细线上的拉力等于滑块所受的合外力,除调节光滑定滑轮的高度使细
线与导轨平行外,还需要的操作是 。
(3)调节好实验装置,甲同学保持光电门的位置不变,多次改变所挂钩码的质量进行实验,每
次遮光条均在A点时由静止释放滑块,记录每次力传感器的示数 F及遮光条遮光时间t,测出遮
1
光条到光电门的距离L,作F− 图像,如果图像是一条过原点的直线,且图像的斜率等于
t2
,则动能定理得到验证;
(4)乙同学保持所挂钩码的质量不变,多次改变光电门的位置,每次遮光条均在 A点时由静止
1
释放滑块,记录力传感器的示数F、每次遮光条到光电门的距离L及遮光时间t,作t2− 图像,
L
如果图像是一条过原点的直线,且图像的斜率等于 ,则动能定理得到验证。
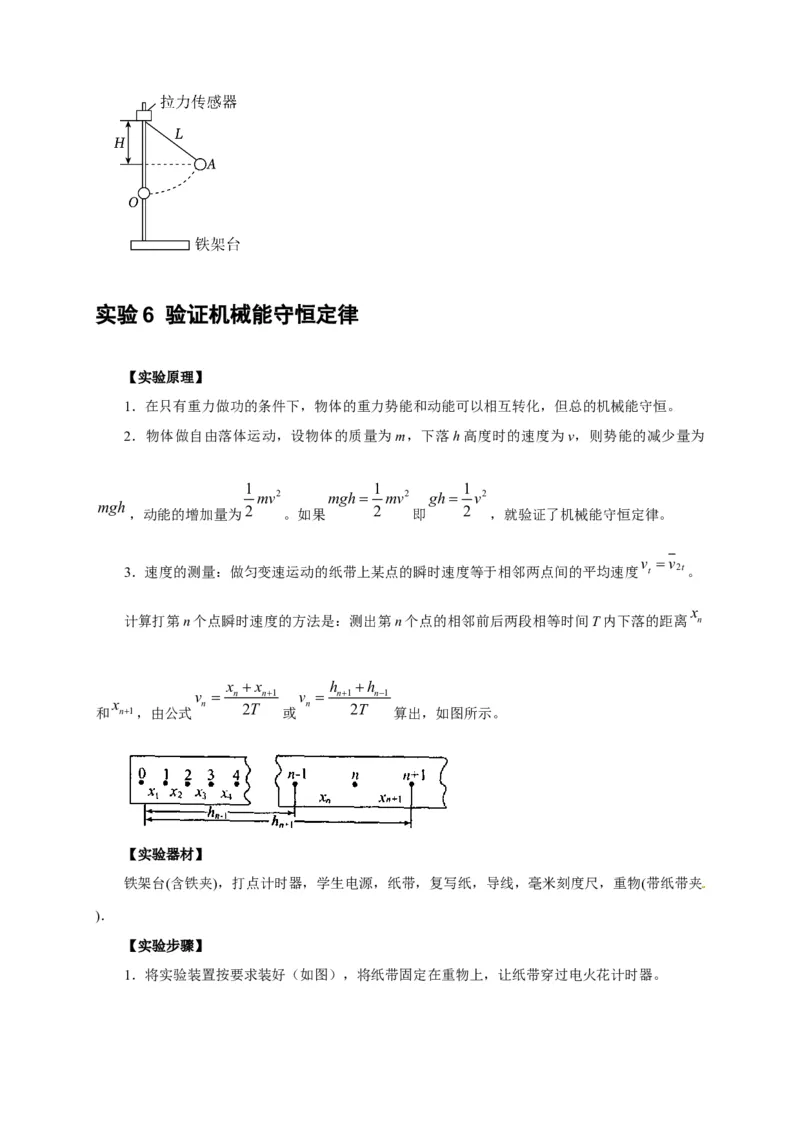
[例题3] (2024•成都三模)某实验小组用如图所示的装置验证在圆周运动中的动能定理,
铁架台上固定着拉力传感器。一小钢球(可视为质点)用不可伸长的轻绳悬挂在拉力传感器的
下端,拉力传感器可记录小钢球在摆动过程中各时刻受到的拉力大小。将小钢球拉至 A点,
用刻度尺量出轻绳的长度L以及拉到A点时小钢球到拉力传感器下端的竖直高度H,释放小钢
球,小钢球在竖直平面内来回摆动,记录拉力传感器的最大示数F和此时小钢球的位置O点。
已知小钢球的质量为m,当地重力加速度大小为g,不计空气阻力。
(1)拉力传感器的最大示数F (填“大于”、“小于”或“等于”)小钢球的重力
mg。
(2)小钢球从A点运动到O点的过程中,合外力对小钢球做的功为 (用
题中所给物理量的字母表示)。
(3)小钢球从A点运动到O点的过程中,小钢球动能的变化量为 (用
题中所给物理量的字母表示)。
(4)在误差允许范围内,合外力对小钢球做的功和小钢球动能的变化量近似相等,则可验证动
能定理成立。实验 6 验证机械能守恒定律
【实验原理】
1.在只有重力做功的条件下,物体的重力势能和动能可以相互转化,但总的机械能守恒。
2.物体做自由落体运动,设物体的质量为m,下落h高度时的速度为v,则势能的减少量为
1 1 1
mv2 mgh mv2 gh v2
mgh ,动能的增加量为2 。如果 2 即 2 ,就验证了机械能守恒定律。
v v
3.速度的测量:做匀变速运动的纸带上某点的瞬时速度等于相邻两点间的平均速度 t 2t。
x
计算打第n个点瞬时速度的方法是:测出第n个点的相邻前后两段相等时间T内下落的距离 n
x x h h
v n n1 v n1 n1
和 x n1,由公式 n 2T 或 n 2T 算出,如图所示。
【实验器材】
铁架台(含铁夹),打点计时器,学生电源,纸带,复写纸,导线,毫米刻度尺,重物(带纸带夹
).
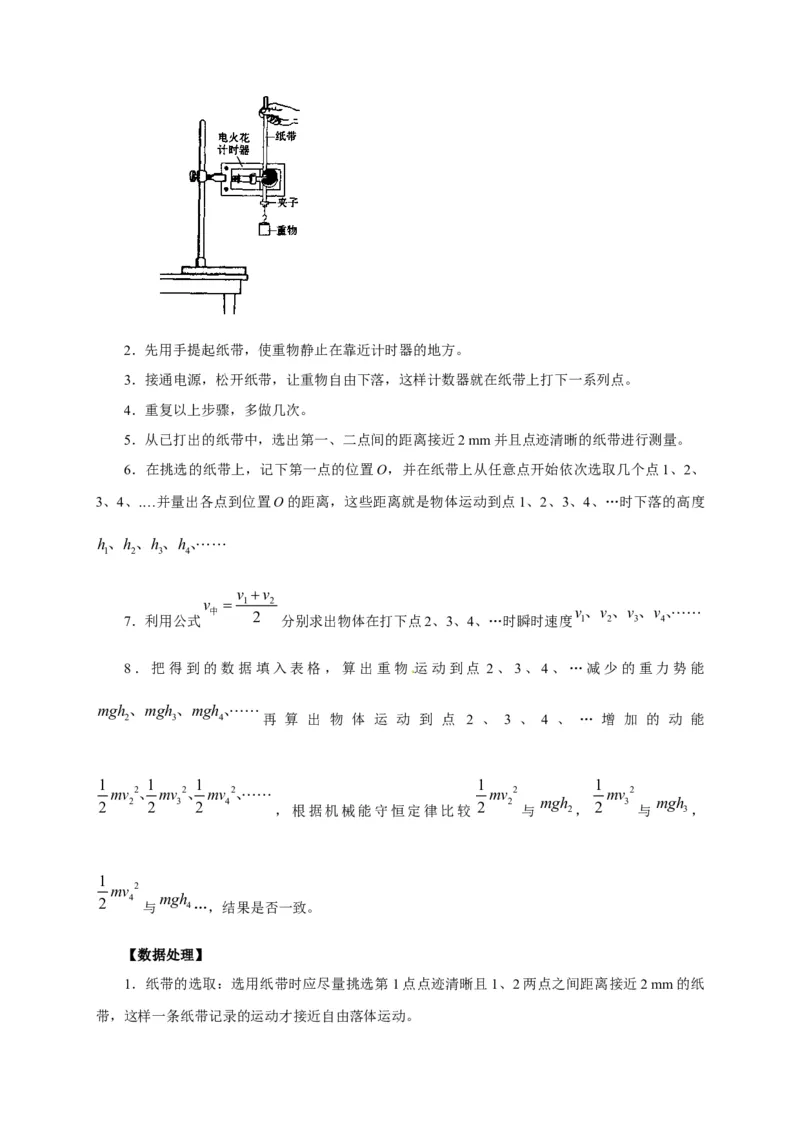
【实验步骤】
1.将实验装置按要求装好(如图),将纸带固定在重物上,让纸带穿过电火花计时器。2.先用手提起纸带,使重物静止在靠近计时器的地方。
3.接通电源,松开纸带,让重物自由下落,这样计数器就在纸带上打下一系列点。
4.重复以上步骤,多做几次。
5.从已打出的纸带中,选出第一、二点间的距离接近2 mm并且点迹清晰的纸带进行测量。
6.在挑选的纸带上,记下第一点的位置O,并在纸带上从任意点开始依次选取几个点1、2、
3、4、.…并量出各点到位置O的距离,这些距离就是物体运动到点1、2、3、4、…时下落的高度
h、h、h、h、
1 2 3 4
v v
v 1 2
中 2 v、v、v、v、
7.利用公式 分别求出物体在打下点2、3、4、…时瞬时速度 1 2 3 4
8.把得到的数据填入表格,算出重物 运动到点 2、3、4、…减少的重力势能
mgh、mgh、mgh、
2 3 4 再 算 出 物 体 运 动 到 点 2 、 3 、 4 、 … 增 加 的 动 能
1 1 1 1 1
mv 2、 mv 2、 mv 2、 mv 2 mv 2
2 2 2 3 2 4 ,根据机械能守恒定律比较 2 2 与 mgh 2, 2 3 与 mgh 3,
1
mv 2
2 4 与 mgh 4…,结果是否一致。
【数据处理】
1.纸带的选取:选用纸带时应尽量挑选第1点点迹清晰且1、2两点之间距离接近2 mm的纸
带,这样一条纸带记录的运动才接近自由落体运动。2.纸带的处理:在第1点上标出O,并从稍靠后的某一点开始,依次标出1、2、3、4…并量
h h
v n1 n1
出各点到位置O点的距离 h 1 、h 2 、h 3 、h 4 、 再利用公式 n 2T 计算出各点对应的瞬时
1
mv 2
速度 v 1 、v 2 、v 3 、v 4 、 计算各点对应的重力势能的减少量 mgh n和动能的增加量 2 n ,并进
v2 v2
h
2 2
行比较看是否相等。也可以 为纵轴,以h为横轴,根据实验数据绘出 图象,若图象是过
原点的直线,则可验证机械能守恒定律,其斜率等于g。
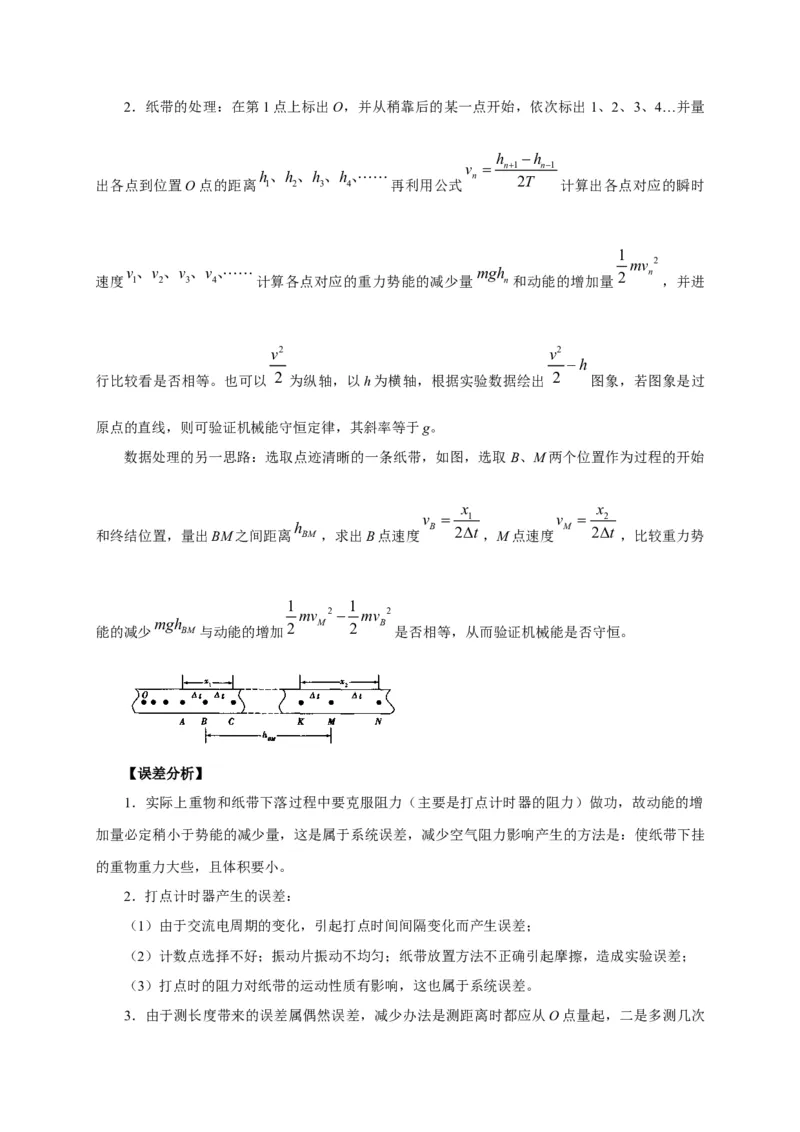
数据处理的另一思路:选取点迹清晰的一条纸带,如图,选取 B、M两个位置作为过程的开始
x x
v 1 v 2
和终结位置,量出BM之间距离 h BM ,求出B点速度 B 2t ,M点速度 M 2t ,比较重力势
1 1
mv 2 mv 2
能的减少 mgh BM 与动能的增加2 M 2 B 是否相等,从而验证机械能是否守恒。
【误差分析】
1.实际上重物和纸带下落过程中要克服阻力(主要是打点计时器的阻力)做功,故动能的增
加量必定稍小于势能的减少量,这是属于系统误差,减少空气阻力影响产生的方法是:使纸带下挂
的重物重力大些,且体积要小。
2.打点计时器产生的误差:
(1)由于交流电周期的变化,引起打点时间间隔变化而产生误差;
(2)计数点选择不好;振动片振动不均匀;纸带放置方法不正确引起摩擦,造成实验误差;
(3)打点时的阻力对纸带的运动性质有影响,这也属于系统误差。
3.由于测长度带来的误差属偶然误差,减少办法是测距离时都应从O点量起,二是多测几次取平均值。
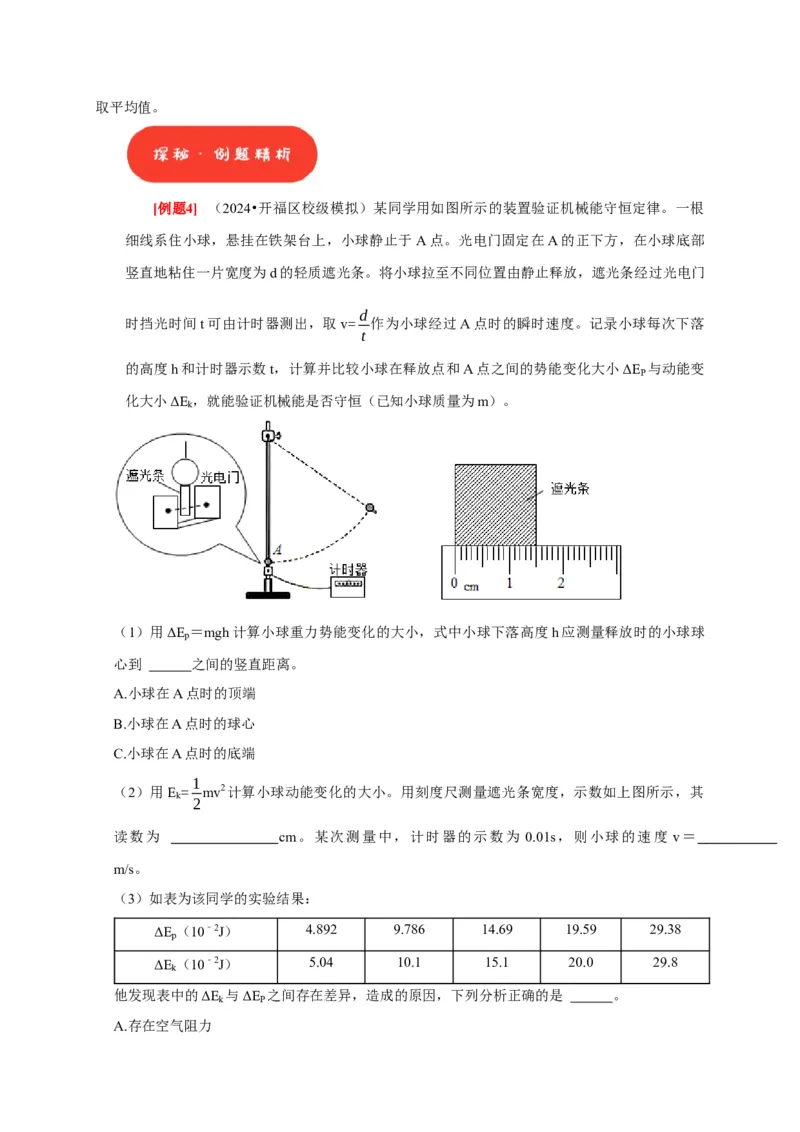
[例题4] (2024•开福区校级模拟)某同学用如图所示的装置验证机械能守恒定律。一根
细线系住小球,悬挂在铁架台上,小球静止于 A点。光电门固定在A的正下方,在小球底部
竖直地粘住一片宽度为d的轻质遮光条。将小球拉至不同位置由静止释放,遮光条经过光电门
d
时挡光时间t可由计时器测出,取v= 作为小球经过A点时的瞬时速度。记录小球每次下落
t
的高度h和计时器示数t,计算并比较小球在释放点和A点之间的势能变化大小ΔE 与动能变
P
化大小ΔE ,就能验证机械能是否守恒(已知小球质量为m)。
k
(1)用ΔE =mgh计算小球重力势能变化的大小,式中小球下落高度h应测量释放时的小球球
p
心到 之间的竖直距离。
A.小球在A点时的顶端
B.小球在A点时的球心
C.小球在A点时的底端
1
(2)用E = mv2计算小球动能变化的大小。用刻度尺测量遮光条宽度,示数如上图所示,其
k
2
读数为 cm。某次测量中,计时器的示数为 0.01s,则小球的速度 v=
m/s。
(3)如表为该同学的实验结果:
ΔE (10﹣2J) 4.892 9.786 14.69 19.59 29.38
p
ΔE (10﹣2J) 5.04 10.1 15.1 20.0 29.8
k
他发现表中的ΔE 与ΔE 之间存在差异,造成的原因,下列分析正确的是 。
k P
A.存在空气阻力B.小球的质量没有测准
C.小球的速度没有测准
(4)为了减小上述(3)步骤中的差异,该同学进行了如下改进:分别测出来光电门中心和球
心到悬点的长度L和s,请写出小球动能变化的大小表达式ΔE = (用m、L、s、d及t表
k
示)。
(5)为了进一步减小实验误差,下列操作可取的是 。
A.遮光条尽量窄一些
B.小球应选择质量大,体积小的钢球
C.更换细线为细橡皮条
D.小球拉离竖直位置尽量小一些
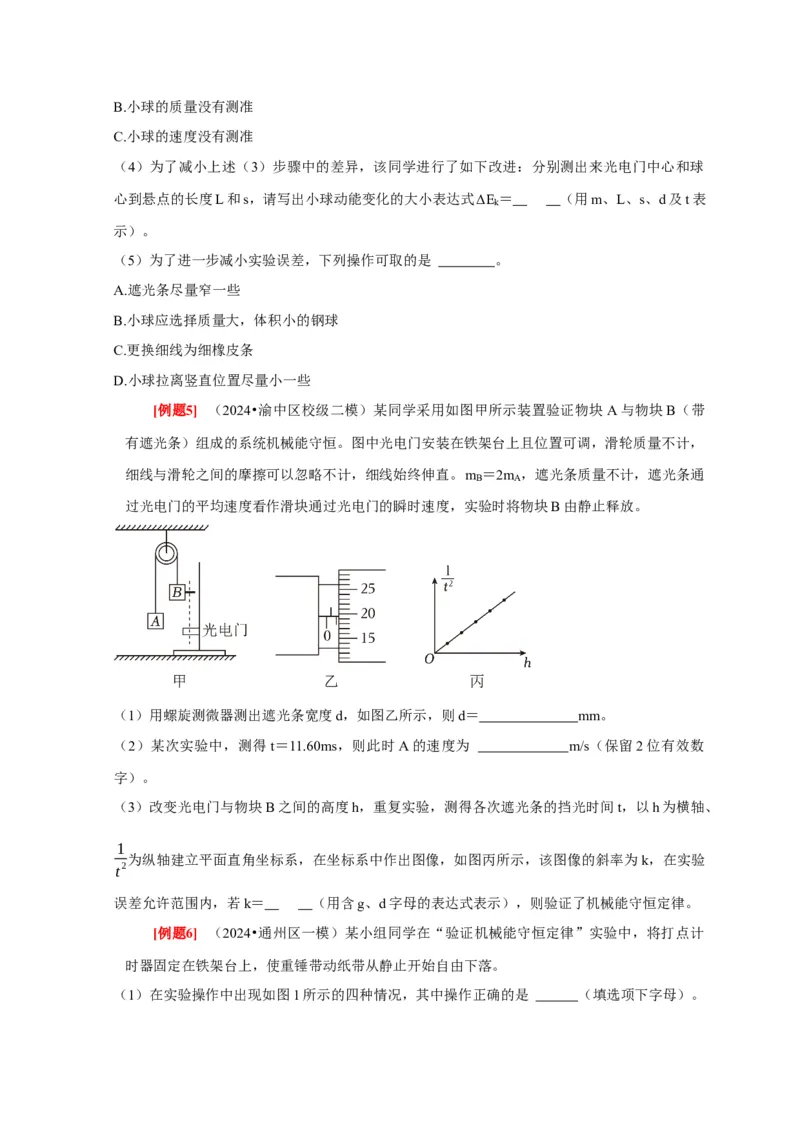
[例题5] (2024•渝中区校级二模)某同学采用如图甲所示装置验证物块 A与物块B(带
有遮光条)组成的系统机械能守恒。图中光电门安装在铁架台上且位置可调,滑轮质量不计,
细线与滑轮之间的摩擦可以忽略不计,细线始终伸直。m =2m ,遮光条质量不计,遮光条通
B A
过光电门的平均速度看作滑块通过光电门的瞬时速度,实验时将物块B由静止释放。
(1)用螺旋测微器测出遮光条宽度d,如图乙所示,则d= mm。
(2)某次实验中,测得t=11.60ms,则此时A的速度为 m/s(保留2位有效数
字)。
(3)改变光电门与物块B之间的高度h,重复实验,测得各次遮光条的挡光时间t,以h为横轴、
1
为纵轴建立平面直角坐标系,在坐标系中作出图像,如图丙所示,该图像的斜率为k,在实验
t2
误差允许范围内,若k= (用含g、d字母的表达式表示),则验证了机械能守恒定律。
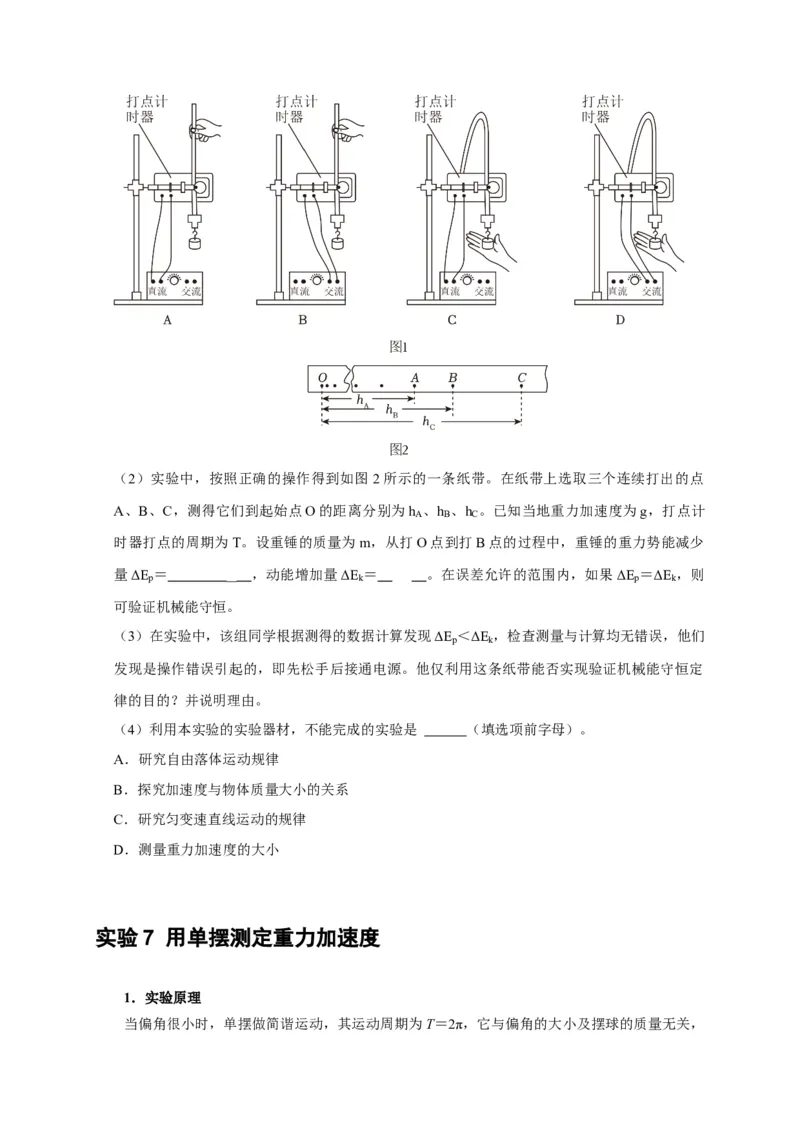
[例题6] (2024•通州区一模)某小组同学在“验证机械能守恒定律”实验中,将打点计
时器固定在铁架台上,使重锤带动纸带从静止开始自由下落。
(1)在实验操作中出现如图1所示的四种情况,其中操作正确的是 (填选项下字母)。(2)实验中,按照正确的操作得到如图 2所示的一条纸带。在纸带上选取三个连续打出的点
A、B、C,测得它们到起始点O的距离分别为h 、h 、h 。已知当地重力加速度为g,打点计
A B C
时器打点的周期为T。设重锤的质量为m,从打O点到打B点的过程中,重锤的重力势能减少
量ΔE
p
= ,动能增加量ΔE
k
= 。在误差允许的范围内,如果ΔE
p
=ΔE
k
,则
可验证机械能守恒。
(3)在实验中,该组同学根据测得的数据计算发现ΔE <ΔE ,检查测量与计算均无错误,他们
p k
发现是操作错误引起的,即先松手后接通电源。他仅利用这条纸带能否实现验证机械能守恒定
律的目的?并说明理由。
(4)利用本实验的实验器材,不能完成的实验是 (填选项前字母)。
A.研究自由落体运动规律
B.探究加速度与物体质量大小的关系
C.研究匀变速直线运动的规律
D.测量重力加速度的大小
实验 7 用单摆测定重力加速度
1.实验原理
当偏角很小时,单摆做简谐运动,其运动周期为T=2π,它与偏角的大小及摆球的质量无关,由此得到g=.因此,只要测出摆长l和振动周期T,就可以求出当地的重力加速度g的值.
2.实验器材
带有铁夹的铁架台、中心有小孔的金属小球,不易伸长的细线(约1米)、秒表、毫米刻度尺和
游标卡尺.
3.实验步骤
(1)让细线的一端穿过金属小球的小孔,然后打一个比小孔大一些的线结,做成单摆.
(2)把细线的上端用铁夹固定在铁架台上,把铁架台放在实验桌边,使铁夹伸到桌面以外,让摆
球自然下垂,在单摆平衡位置处作上标记,如实验原理图所示.
(3)用毫米刻度尺量出摆线长度l′,用游标卡尺测出摆球的直径,即得出金属小球半径r,计算
出摆长l=l′+r.
(4)把单摆从平衡位置处拉开一个很小的角度(不超过5°),然后放开金属小球,让金属小球摆动,
待摆动平稳后测出单摆完成30~50次全振动所用的时间t,计算出金属小球完成一次全振动所用时
间,这个时间就是单摆的振动周期,即T=(N为全振动的次数),反复测3次,再算出周期=.
(5)根据单摆周期公式T=2π计算当地的重力加速度g=.
(6)改变摆长,重做几次实验,计算出每次实验的重力加速度值,求出它们的平均值,该平均值
即为当地的重力加速度值.
(7)将测得的重力加速度值与当地的重力加速度值相比较,分析产生误差的可能原因.
4.注意事项
(1)构成单摆的条件:细线的质量要小、弹性要小,选用体积小、密度大的小球,摆角不超过
5°.
(2)要使摆球在同一竖直面内摆动,不能形成圆锥摆,方法是将摆球拉到一定位置后由静止释放.
(3)测周期的方法:①要从摆球过平衡位置时开始计时.因为此处速度大、计时误差小,而最高
点速度小、计时误差大.
②要测多次全振动的时间来计算周期.如在摆球过平衡位置时开始计时,且在数“零”的同时
按下秒表,以后每当摆球从同一方向通过平衡位置时计数1次.
(4)本实验可以采用图象法来处理数据.即用纵轴表示摆长 l,用横轴表示T2,将实验所得数据
在坐标平面上标出,应该得到一条倾斜直线,直线的斜率k=.这是在众多的实验中经常采用的科学
处理数据的重要办法.
5.数据处理
处理数据有两种方法:(1)公式法:测出30次或50次全振动的时间t,利用T=求出周期;不改
变摆长,反复测量三次,算出三次测得的周期的平均值,然后代入公式g=求重力加速度.
(2)图象法:
由单摆周期公式不难推出:l=T2,因此,分别测出一系列摆长l对应的周期T,作l-T2的图象,
图象应是一条通过原点的直线,求出图线的斜率k=,即可利用g=4π2k求得重力加速度值,如图
所示.6.误差分析
(1)系统误差的主要来源:悬点不固定,球、线不符合要求,振动是圆锥摆而不是在同一竖直平
面内的振动等.
(2)偶然误差主要来自时间的测量上,因此,要从摆球通过平衡位置时开始计时,不能多计或漏
计振动次数.
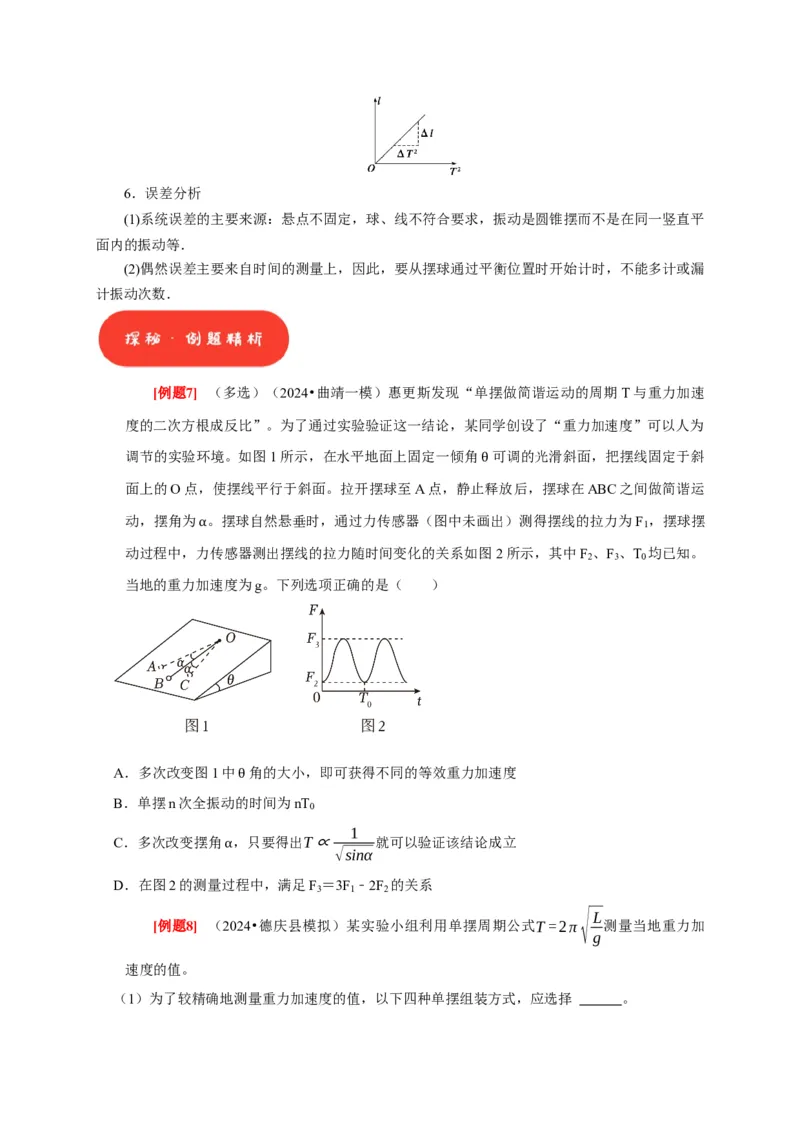
[例题7] (多选)(2024•曲靖一模)惠更斯发现“单摆做简谐运动的周期T与重力加速
度的二次方根成反比”。为了通过实验验证这一结论,某同学创设了“重力加速度”可以人为
调节的实验环境。如图1所示,在水平地面上固定一倾角 可调的光滑斜面,把摆线固定于斜
面上的O点,使摆线平行于斜面。拉开摆球至A点,静止θ释放后,摆球在ABC之间做简谐运
动,摆角为 。摆球自然悬垂时,通过力传感器(图中未画出)测得摆线的拉力为F ,摆球摆
1
动过程中,力α传感器测出摆线的拉力随时间变化的关系如图 2所示,其中F 、F 、T 均已知。
2 3 0
当地的重力加速度为g。下列选项正确的是( )
A.多次改变图1中 角的大小,即可获得不同的等效重力加速度
B.单摆n次全振动的θ时间为nT
0
1
C.多次改变摆角 ,只要得出T∝ 就可以验证该结论成立
√sinα
α
D.在图2的测量过程中,满足F =3F ﹣2F 的关系
3 1 2
√L
[例题8] (2024•德庆县模拟)某实验小组利用单摆周期公式T=2π 测量当地重力加
g
速度的值。
(1)为了较精确地测量重力加速度的值,以下四种单摆组装方式,应选择 。(2)组装好单摆,先用刻度尺测量摆线长度,再用游标卡尺测量小球的直径,其示数如图甲,
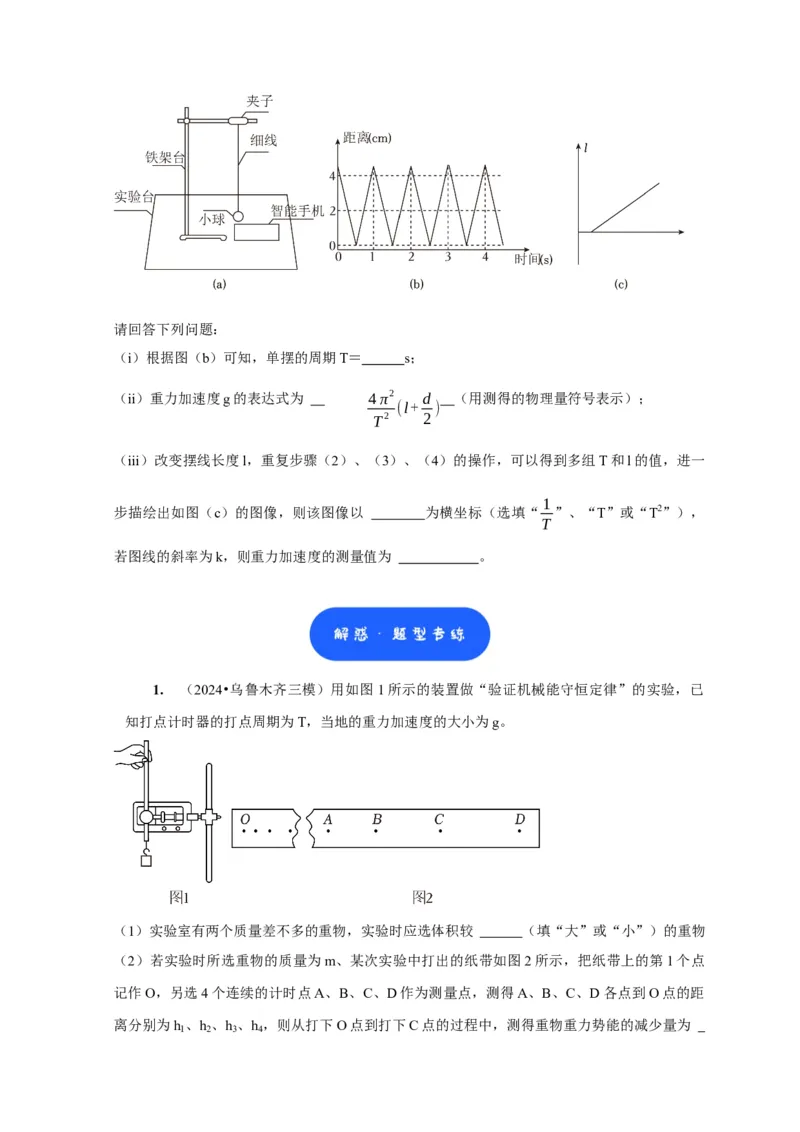
则小球直径为 mm。
(3)周期公式中的L是单摆的摆长,其值等于摆线长与 之和。
(4)某次实验时,改变摆长并测出对应的周期,得到如表的实验数据并描点在图乙的坐标系中,
请在图乙中作出T2﹣L图像。
次数 1 2 3 4 5
L/m 0.50 0.60 0.70 0.80 0.90
T/s 1.42 1.55 1.67 1.85 1.90
T2/s2 2.02 2.40 2.79 3.42 3.61
(5)根据T2﹣L图像算出重力加速度g= m/s2(结果保留3位有效数字)。
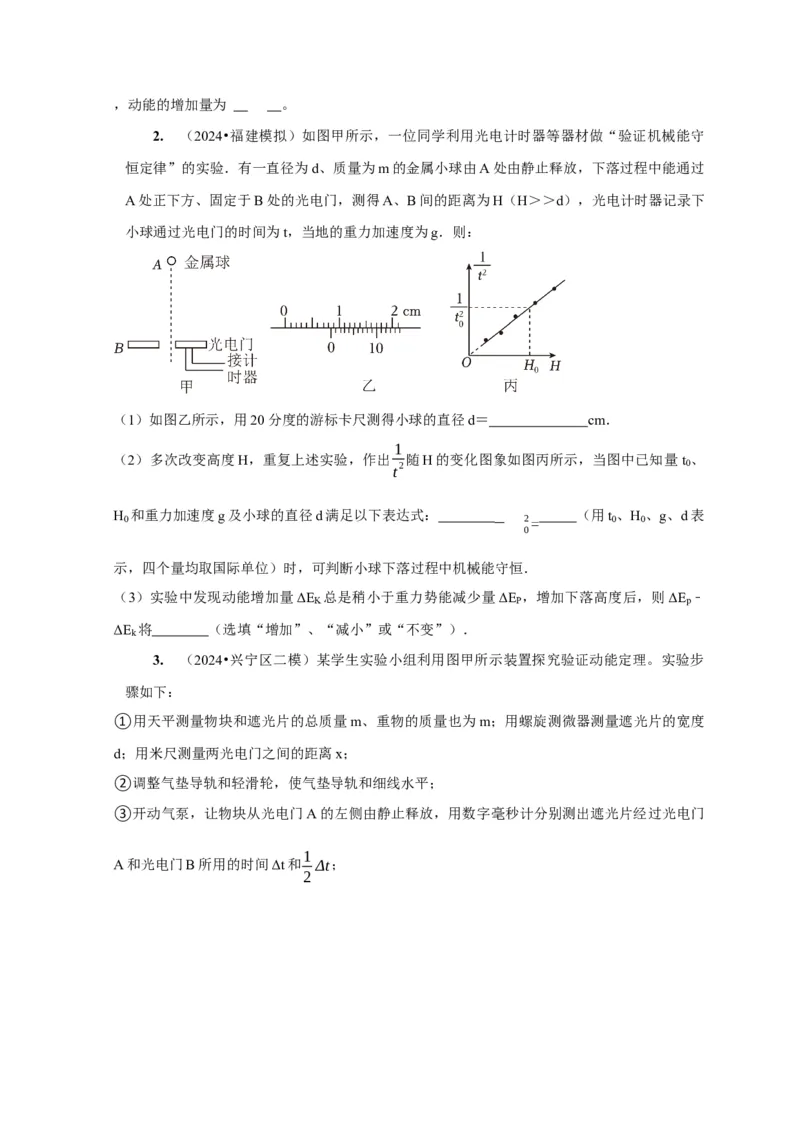
[例题9] (2024•合肥二模)如图(a)所示,某兴趣小组用单摆测量重力加速度。选用的
实验器材有:智能手机、小球、细线、铁架台、夹子、游标卡尺、刻度尺等,实验操作如下:
(1)用铁夹将细线上端固定在铁架台上,将小球竖直悬挂;
(2)用刻度尺测出摆线的长度为l,用游标卡尺测出小球直径为d;
(3)将智能手机置于小球平衡位置的正下方,启用APP《手机物理工坊》的“近距秒表”功能;
(4)将小球由平衡位置拉开一个角度( <5°),静止释放,软件同时描绘出小球与手机间距
离随时间变化的图像,如图(b)所示。 θ请回答下列问题:
(i)根据图(b)可知,单摆的周期T= s;
(ii)重力加速度g的表达式为 4π2 d (用测得的物理量符号表示);
(l+ )
T2 2
(iii)改变摆线长度l,重复步骤(2)、(3)、(4)的操作,可以得到多组T和l的值,进一
1
步描绘出如图(c)的图像,则该图像以 为横坐标(选填“ ”、“T”或“T2”),
T
若图线的斜率为k,则重力加速度的测量值为 。
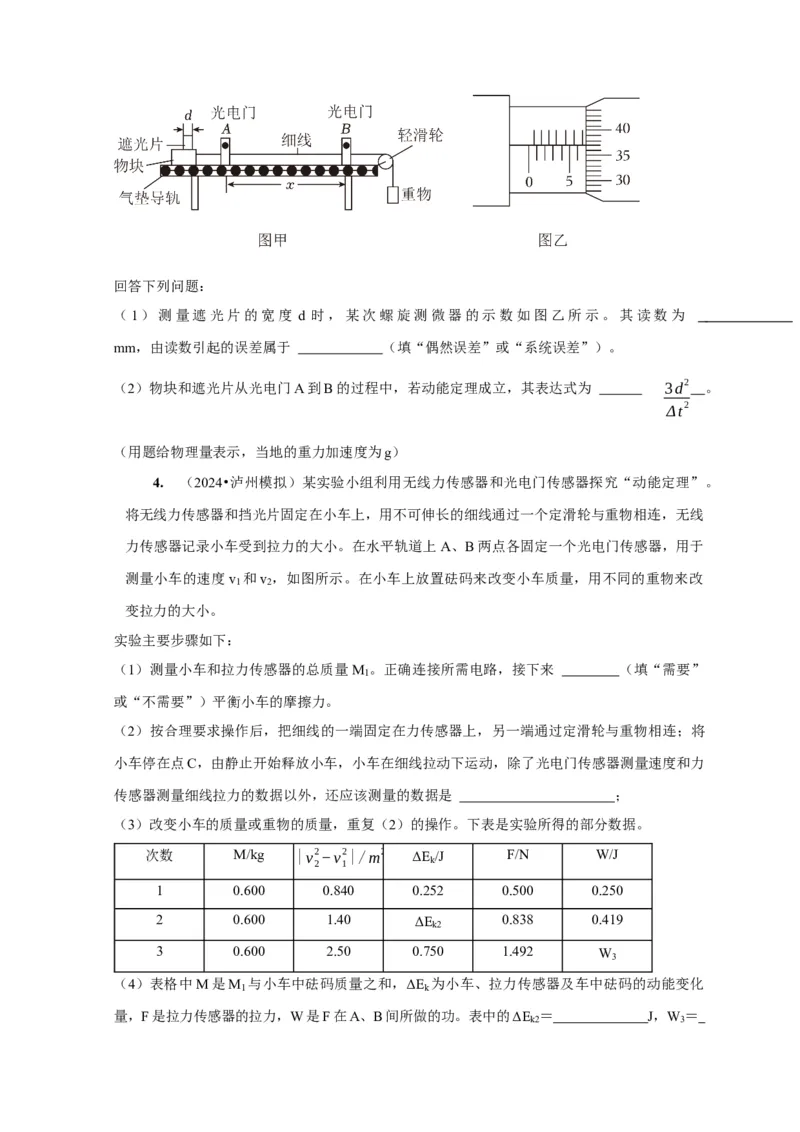
1. (2024•乌鲁木齐三模)用如图1所示的装置做“验证机械能守恒定律”的实验,已
知打点计时器的打点周期为T,当地的重力加速度的大小为g。
(1)实验室有两个质量差不多的重物,实验时应选体积较 (填“大”或“小”)的重物
(2)若实验时所选重物的质量为m、某次实验中打出的纸带如图2所示,把纸带上的第1个点
记作O,另选4个连续的计时点A、B、C、D作为测量点,测得A、B、C、D各点到O点的距
离分别为h 、h 、h 、h ,则从打下O点到打下C点的过程中,测得重物重力势能的减少量为
1 2 3 4,动能的增加量为 。
2. (2024•福建模拟)如图甲所示,一位同学利用光电计时器等器材做“验证机械能守
恒定律”的实验.有一直径为d、质量为m的金属小球由A处由静止释放,下落过程中能通过
A处正下方、固定于B处的光电门,测得A、B间的距离为H(H>>d),光电计时器记录下
小球通过光电门的时间为t,当地的重力加速度为g.则:
(1)如图乙所示,用20分度的游标卡尺测得小球的直径d= cm.
1
(2)多次改变高度H,重复上述实验,作出 随H的变化图象如图丙所示,当图中已知量 t 、
t2 0
H
0
和重力加速度g及小球的直径d满足以下表达式:
2=
(用t
0
、H
0
、g、d表
0
示,四个量均取国际单位)时,可判断小球下落过程中机械能守恒.
(3)实验中发现动能增加量ΔE 总是稍小于重力势能减少量ΔE ,增加下落高度后,则ΔE ﹣
K P p
ΔE 将 (选填“增加”、“减小”或“不变”).
k
3. (2024•兴宁区二模)某学生实验小组利用图甲所示装置探究验证动能定理。实验步
骤如下:
①用天平测量物块和遮光片的总质量m、重物的质量也为m;用螺旋测微器测量遮光片的宽度
d;用米尺测量两光电门之间的距离x;
②调整气垫导轨和轻滑轮,使气垫导轨和细线水平;
③开动气泵,让物块从光电门A的左侧由静止释放,用数字毫秒计分别测出遮光片经过光电门
1
A和光电门B所用的时间Δt和 Δt;
2回答下列问题:
(1)测量遮光片的宽度 d 时,某次螺旋测微器的示数如图乙所示。其读数为
mm,由读数引起的误差属于 (填“偶然误差”或“系统误差”)。
(2)物块和遮光片从光电门A到B的过程中,若动能定理成立,其表达式为 3d2 。
Δt2
(用题给物理量表示,当地的重力加速度为g)
4. (2024•泸州模拟)某实验小组利用无线力传感器和光电门传感器探究“动能定理”。
将无线力传感器和挡光片固定在小车上,用不可伸长的细线通过一个定滑轮与重物相连,无线
力传感器记录小车受到拉力的大小。在水平轨道上A、B两点各固定一个光电门传感器,用于
测量小车的速度v 和v ,如图所示。在小车上放置砝码来改变小车质量,用不同的重物来改
1 2
变拉力的大小。
实验主要步骤如下:
(1)测量小车和拉力传感器的总质量M 。正确连接所需电路,接下来 (填“需要”
1
或“不需要”)平衡小车的摩擦力。
(2)按合理要求操作后,把细线的一端固定在力传感器上,另一端通过定滑轮与重物相连;将
小车停在点C,由静止开始释放小车,小车在细线拉动下运动,除了光电门传感器测量速度和力
传感器测量细线拉力的数据以外,还应该测量的数据是 ;
(3)改变小车的质量或重物的质量,重复(2)的操作。下表是实验所得的部分数据。
次数 M/kg |v
2
2−v
1
2|/m2 ⋅s−Δ2 E
k
/J F/N W/J
1 0.600 0.840 0.252 0.500 0.250
2 0.600 1.40 ΔE 0.838 0.419
k2
3 0.600 2.50 0.750 1.492 W
3
(4)表格中M是M 与小车中砝码质量之和,ΔE 为小车、拉力传感器及车中砝码的动能变化
1 k
量,F是拉力传感器的拉力,W是F在A、B间所做的功。表中的ΔE = J,W =
k2 3J(结果均保留三位有效数字)。
(5)该小组组员发现每组数据始终有W<ΔE ,排除偶然因素造成误差外,最可能出现以上结
k
果的原因是 。
1
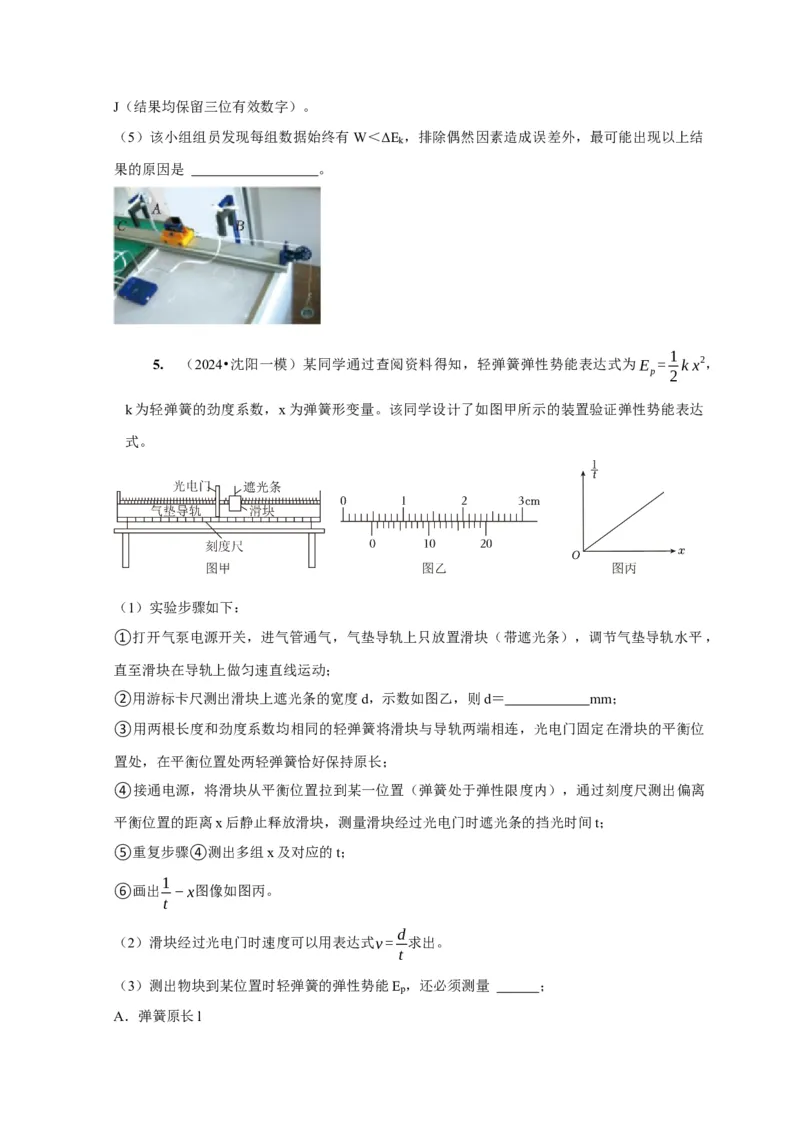
5. (2024•沈阳一模)某同学通过查阅资料得知,轻弹簧弹性势能表达式为E = kx2,
p 2
k为轻弹簧的劲度系数,x为弹簧形变量。该同学设计了如图甲所示的装置验证弹性势能表达
式。
(1)实验步骤如下:
①打开气泵电源开关,进气管通气,气垫导轨上只放置滑块(带遮光条),调节气垫导轨水平,
直至滑块在导轨上做匀速直线运动;
②用游标卡尺测出滑块上遮光条的宽度d,示数如图乙,则d= mm;
③用两根长度和劲度系数均相同的轻弹簧将滑块与导轨两端相连,光电门固定在滑块的平衡位
置处,在平衡位置处两轻弹簧恰好保持原长;
④接通电源,将滑块从平衡位置拉到某一位置(弹簧处于弹性限度内),通过刻度尺测出偏离
平衡位置的距离x后静止释放滑块,测量滑块经过光电门时遮光条的挡光时间t;
⑤重复步骤④测出多组x及对应的t;
1
⑥画出 −x图像如图丙。
t
d
(2)滑块经过光电门时速度可以用表达式v= 求出。
t
(3)测出物块到某位置时轻弹簧的弹性势能E ,还必须测量 ;
p
A.弹簧原长lB.当地重力加速度g
C.滑块(含遮光条)的质量m
1
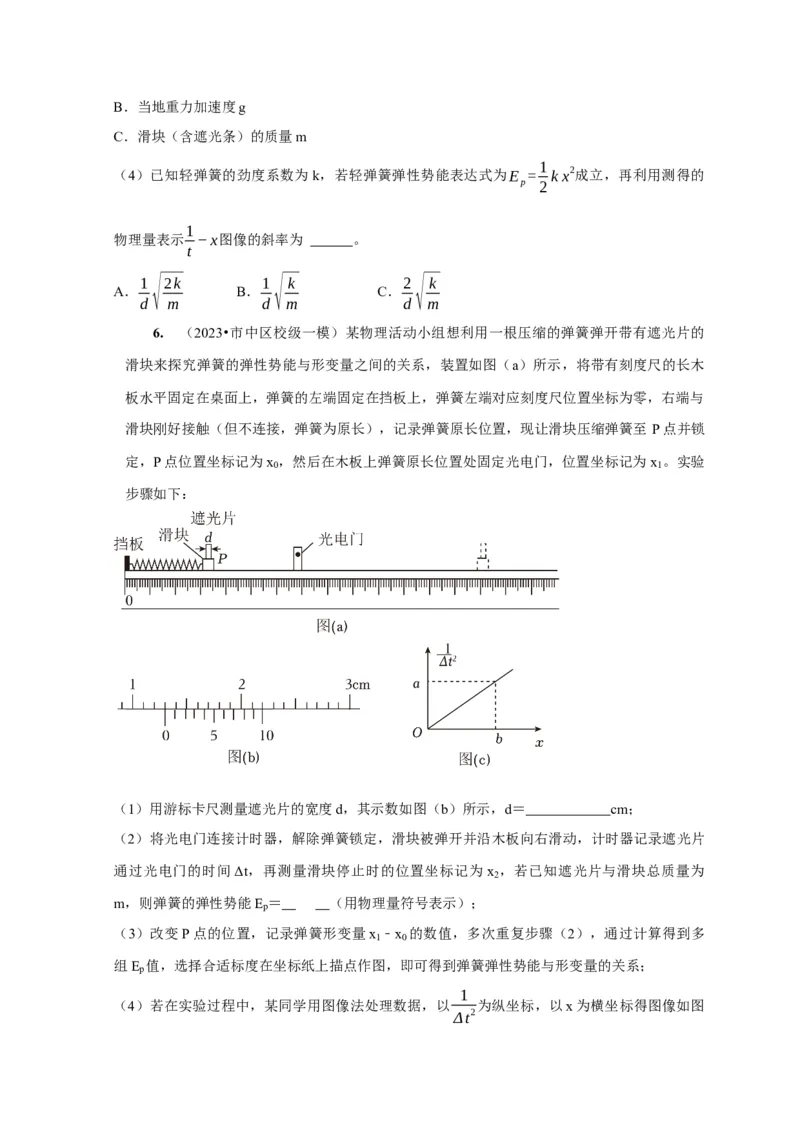
(4)已知轻弹簧的劲度系数为k,若轻弹簧弹性势能表达式为E = kx2成立,再利用测得的
p 2
1
物理量表示 −x图像的斜率为 。
t
1 √2k 1 √ k 2 √ k
A. B. C.
d m d m d m
6. (2023•市中区校级一模)某物理活动小组想利用一根压缩的弹簧弹开带有遮光片的
滑块来探究弹簧的弹性势能与形变量之间的关系,装置如图(a)所示,将带有刻度尺的长木
板水平固定在桌面上,弹簧的左端固定在挡板上,弹簧左端对应刻度尺位置坐标为零,右端与
滑块刚好接触(但不连接,弹簧为原长),记录弹簧原长位置,现让滑块压缩弹簧至 P点并锁
定,P点位置坐标记为x ,然后在木板上弹簧原长位置处固定光电门,位置坐标记为x 。实验
0 1
步骤如下:
(1)用游标卡尺测量遮光片的宽度d,其示数如图(b)所示,d= cm;
(2)将光电门连接计时器,解除弹簧锁定,滑块被弹开并沿木板向右滑动,计时器记录遮光片
通过光电门的时间Δt,再测量滑块停止时的位置坐标记为x ,若已知遮光片与滑块总质量为
2
m,则弹簧的弹性势能E = (用物理量符号表示);
p
(3)改变P点的位置,记录弹簧形变量x ﹣x 的数值,多次重复步骤(2),通过计算得到多
1 0
组E 值,选择合适标度在坐标纸上描点作图,即可得到弹簧弹性势能与形变量的关系;
p
1
(4)若在实验过程中,某同学用图像法处理数据,以 为纵坐标,以x为横坐标得图像如图
Δt2(c)所示,设重力加速度为g,则该同学选择的横坐标x为 ,由图线可得滑块与木
板间的动摩擦因数 =
(用物理量的符号表μ示)。

