
文档内容
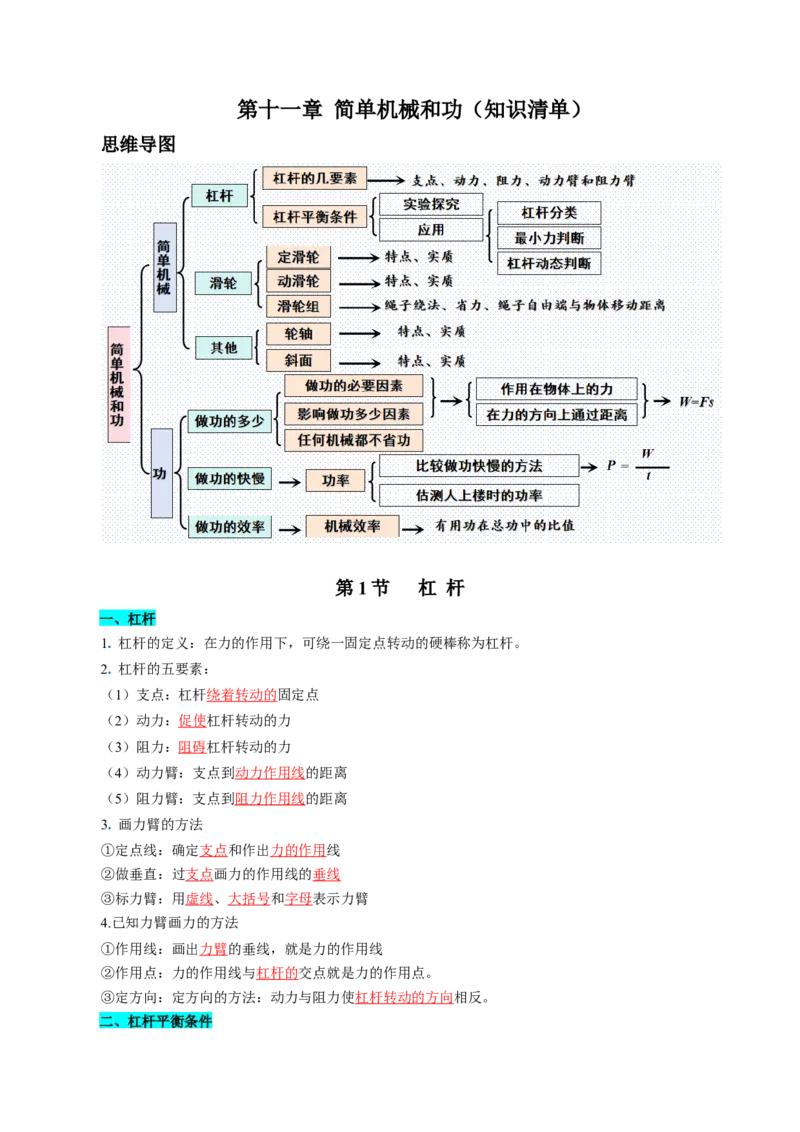
第十一章 简单机械和功(知识清单)
思维导图
第1节 杠 杆
一、杠杆
1. 杠杆的定义:在力的作用下,可绕一固定点转动的硬棒称为杠杆。
2. 杠杆的五要素:
(1)支点:杠杆绕着转动的固定点
(2)动力:促使杠杆转动的力
(3)阻力:阻碍杠杆转动的力
(4)动力臂:支点到动力作用线的距离
(5)阻力臂:支点到阻力作用线的距离
3. 画力臂的方法
①定点线:确定支点和作出力的作用线
②做垂直:过支点画力的作用线的垂线
③标力臂:用虚线、大括号和字母表示力臂
4.已知力臂画力的方法
①作用线:画出力臂的垂线,就是力的作用线
②作用点:力的作用线与杠杆的交点就是力的作用点。
③定方向:定方向的方法:动力与阻力使杠杆转动的方向相反。
二、杠杆平衡条件【设计实验】
(1)实验器材:杠杆、钩码、弹簧测力计、铁架台
(2)测量的物理量:
①动力和阻力。
②动力臂和阻力臂。
【进行实验与收集数据】
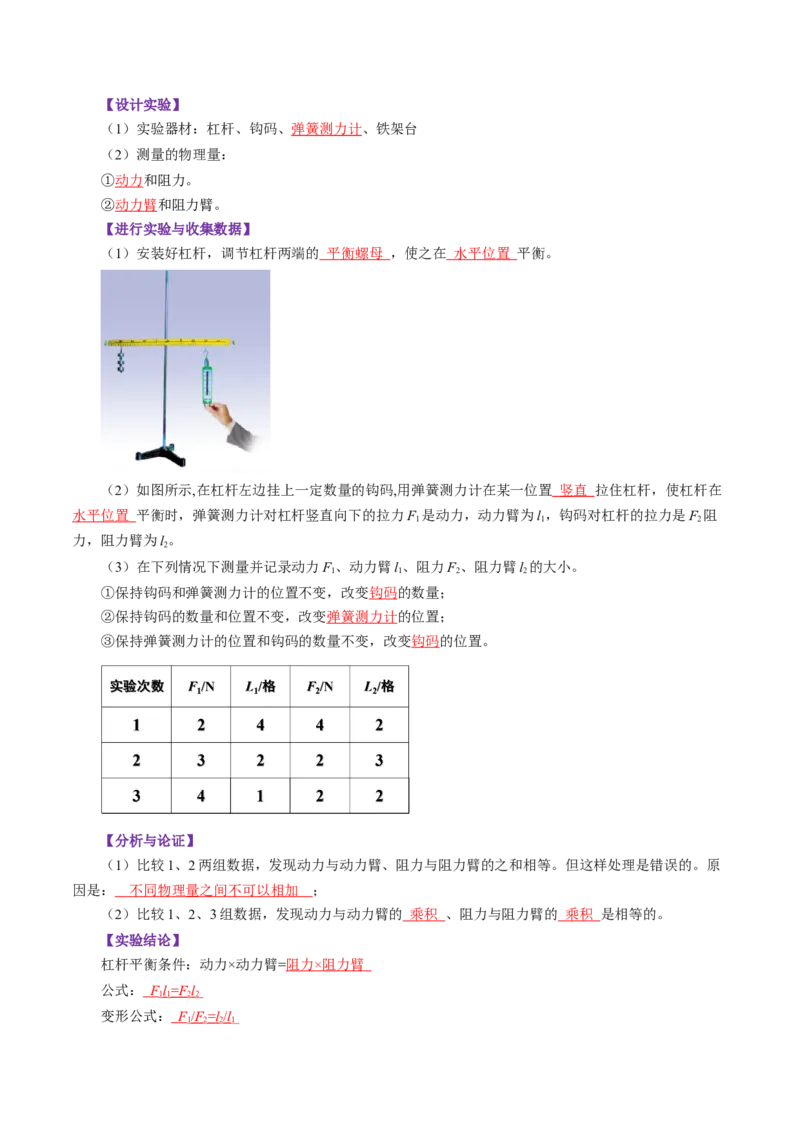
(1)安装好杠杆,调节杠杆两端的 平衡螺母 ,使之在 水平位置 平衡。
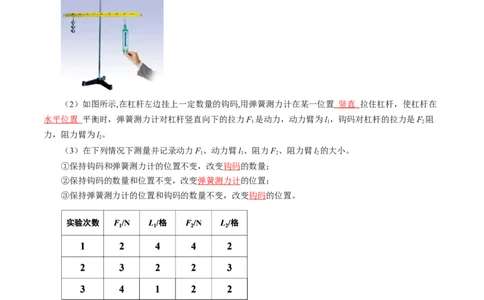
(2)如图所示,在杠杆左边挂上一定数量的钩码,用弹簧测力计在某一位置 竖直 拉住杠杆,使杠杆在
水平位置 平衡时,弹簧测力计对杠杆竖直向下的拉力F 是动力,动力臂为l,钩码对杠杆的拉力是F 阻
1 1 2
力,阻力臂为l。
2
(3)在下列情况下测量并记录动力F、动力臂l、阻力F、阻力臂l 的大小。
1 1 2 2
①保持钩码和弹簧测力计的位置不变,改变钩码的数量;
②保持钩码的数量和位置不变,改变弹簧测力计的位置;
③保持弹簧测力计的位置和钩码的数量不变,改变钩码的位置。
【分析与论证】
(1)比较1、2两组数据,发现动力与动力臂、阻力与阻力臂的之和相等。但这样处理是错误的。原
因是: 不同物理量之间不可以相加 ;
(2)比较1、2、3组数据,发现动力与动力臂的 乘积 、阻力与阻力臂的 乘积 是相等的。
【实验结论】
杠杆平衡条件:动力×动力臂= 阻力 × 阻力臂
公式: F l = F l
11 22
变形公式: F / F = l / l
1 2 2 1变形公式解读:力的比值与力臂的比值成反比。也就是力的比值为1:2,力臂的比值就为2:1。力臂的
比值为3:4,力的比值就为4:3。
【交流讨论】
(1)杠杆的调平方法:哪边高往哪边调。实验过程中不能调节平衡螺母。
(2)在水平方向上平衡的原因:a消除杠杆自身重力对实验的影响,b便于直接读出力臂。
(3)多次实验的目的:防止实验具有偶然性,得出普遍规律。
(4)弹簧测力计必须在竖直方向上施力。不然力臂会变小。
三、杠杆平衡条件的应用
1. 杠杆的分类。
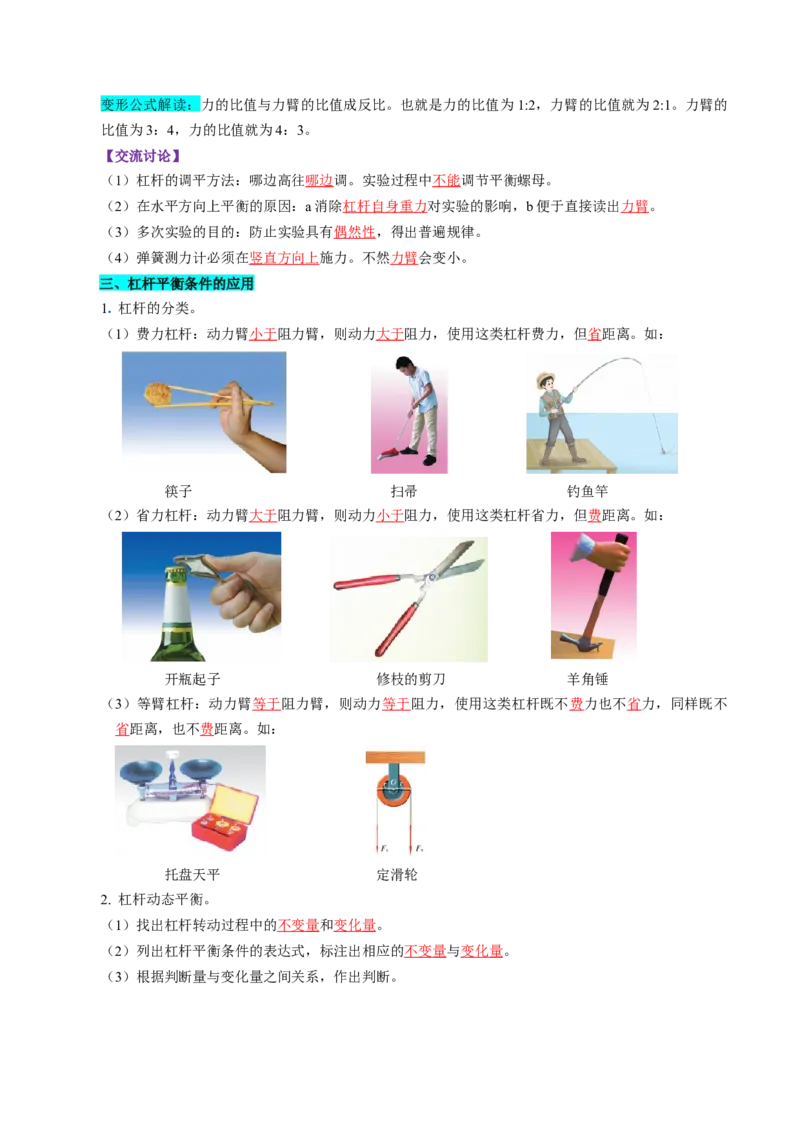
(1)费力杠杆:动力臂小于阻力臂,则动力大于阻力,使用这类杠杆费力,但省距离。如:
筷子 扫帚 钓鱼竿
(2)省力杠杆:动力臂大于阻力臂,则动力小于阻力,使用这类杠杆省力,但费距离。如:
开瓶起子 修枝的剪刀 羊角锤
(3)等臂杠杆:动力臂等于阻力臂,则动力等于阻力,使用这类杠杆既不费力也不省力,同样既不
省距离,也不费距离。如:
托盘天平 定滑轮
2. 杠杆动态平衡。
(1)找出杠杆转动过程中的不变量和变化量。
(2)列出杠杆平衡条件的表达式,标注出相应的不变量与变化量。
(3)根据判断量与变化量之间关系,作出判断。例:判断杠杆由数值变为水平过程中,动力F的变化。
3. 最小动力判断。
(1)确定杠杆转动中不变量。
(2)列出杠杆平衡条件的表达式,标注出相应的不变量。
(3)若阻力和阻力臂不变,当动力臂最长时,动力最小。
(4)如动力作用点固定,则以支点与动力作用点连线为力臂最长。
第2节 滑轮
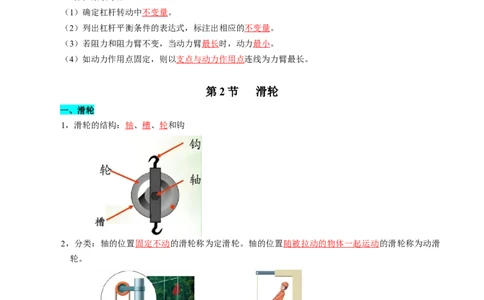
一、滑轮
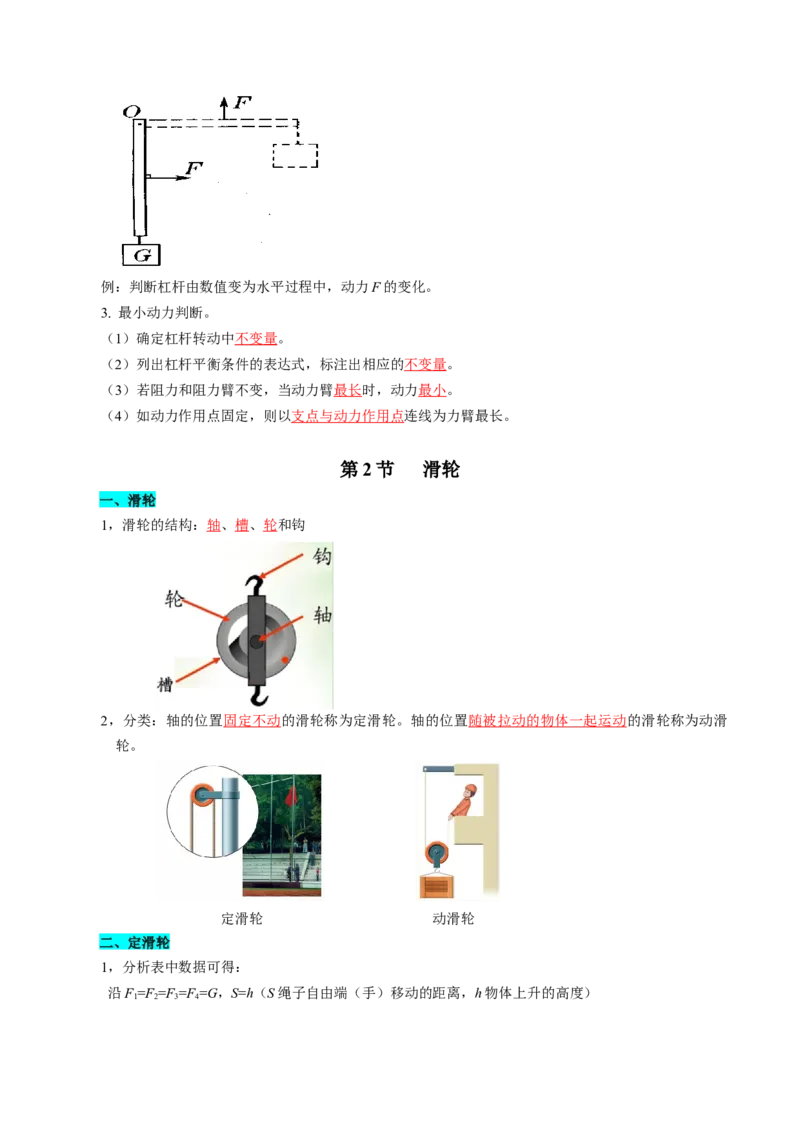
1,滑轮的结构:轴、槽、轮和钩
2,分类:轴的位置固定不动的滑轮称为定滑轮。轴的位置随被拉动的物体一起运动的滑轮称为动滑
轮。
定滑轮 动滑轮
二、定滑轮
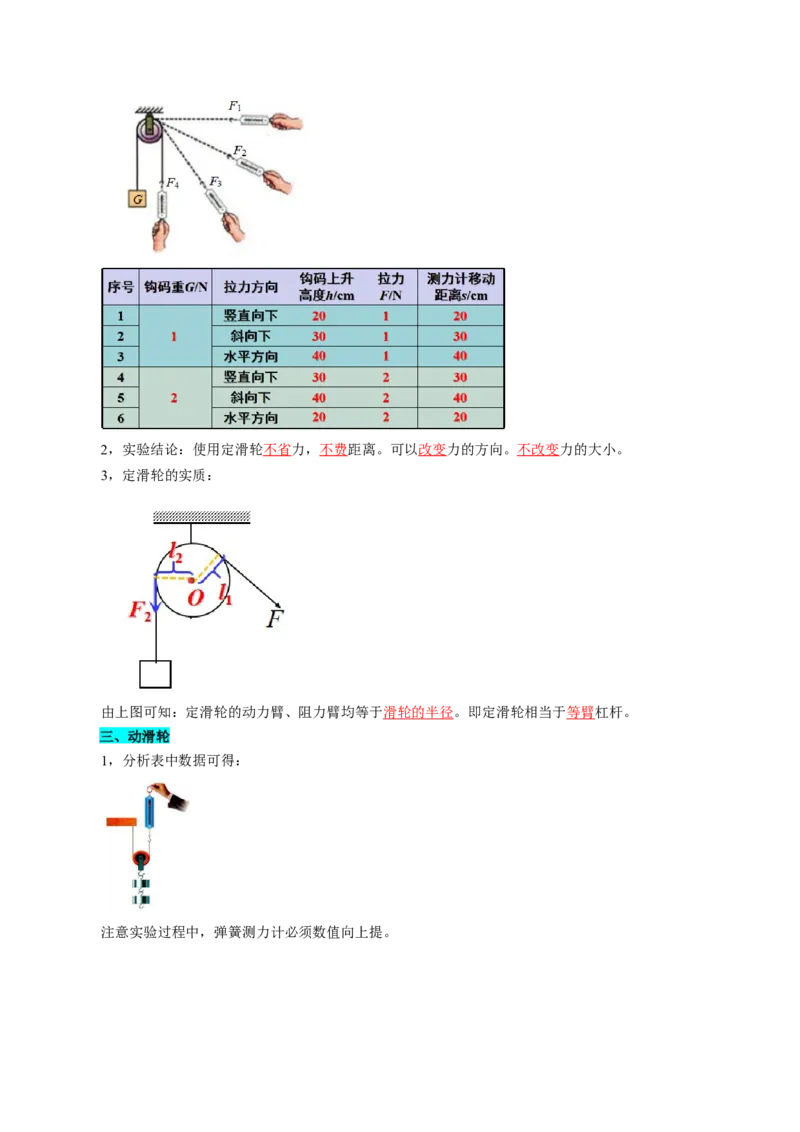
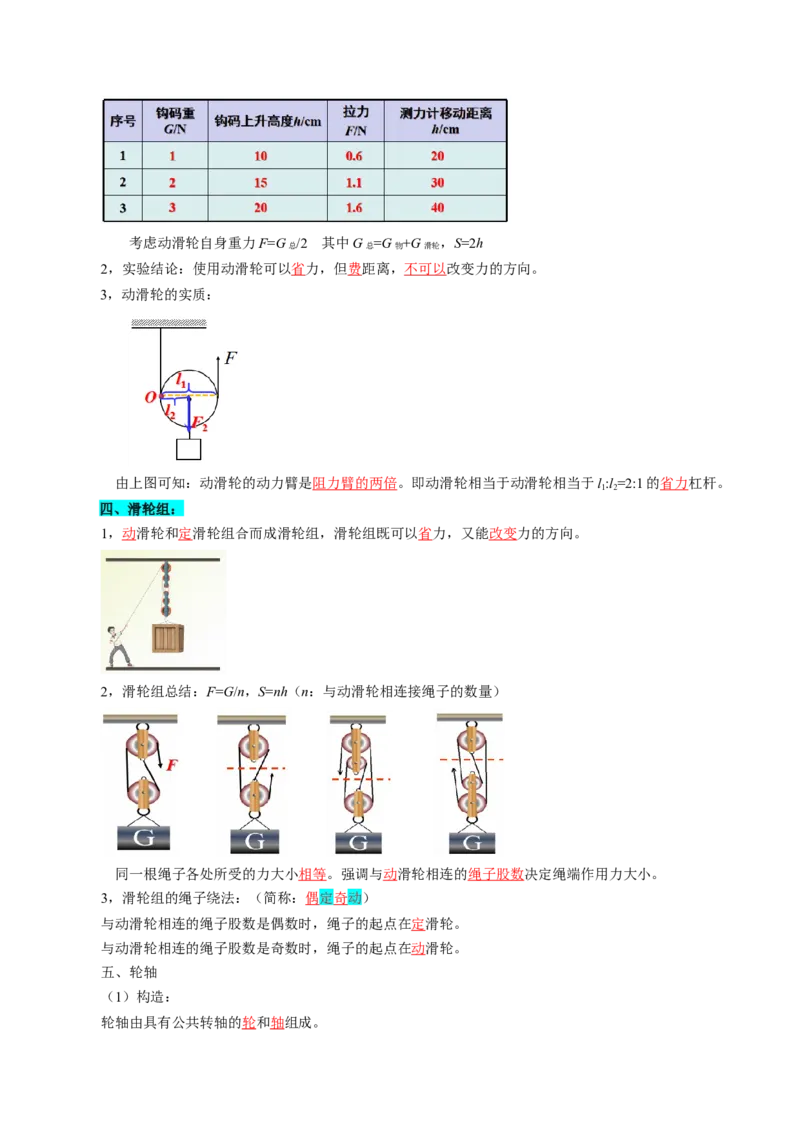
1,分析表中数据可得:
沿F=F=F=F=G,S=h(S绳子自由端(手)移动的距离,h物体上升的高度)
1 2 3 42,实验结论:使用定滑轮不省力,不费距离。可以改变力的方向。不改变力的大小。
3,定滑轮的实质:
由上图可知:定滑轮的动力臂、阻力臂均等于滑轮的半径。即定滑轮相当于等臂杠杆。
三、动滑轮
1,分析表中数据可得:
注意实验过程中,弹簧测力计必须数值向上提。考虑动滑轮自身重力F=G /2 其中G =G +G ,S=2h
总 总 物 滑轮
2,实验结论:使用动滑轮可以省力,但费距离,不可以改变力的方向。
3,动滑轮的实质:
由上图可知:动滑轮的动力臂是阻力臂的两倍。即动滑轮相当于动滑轮相当于l:l=2:1的省力杠杆。
1 2
四、滑轮组:
1,动滑轮和定滑轮组合而成滑轮组,滑轮组既可以省力,又能改变力的方向。
2,滑轮组总结:F=G/n,S=nh(n:与动滑轮相连接绳子的数量)
同一根绳子各处所受的力大小相等。强调与动滑轮相连的绳子股数决定绳端作用力大小。
3,滑轮组的绳子绕法:(简称:偶定奇动)
与动滑轮相连的绳子股数是偶数时,绳子的起点在定滑轮。
与动滑轮相连的绳子股数是奇数时,绳子的起点在动滑轮。
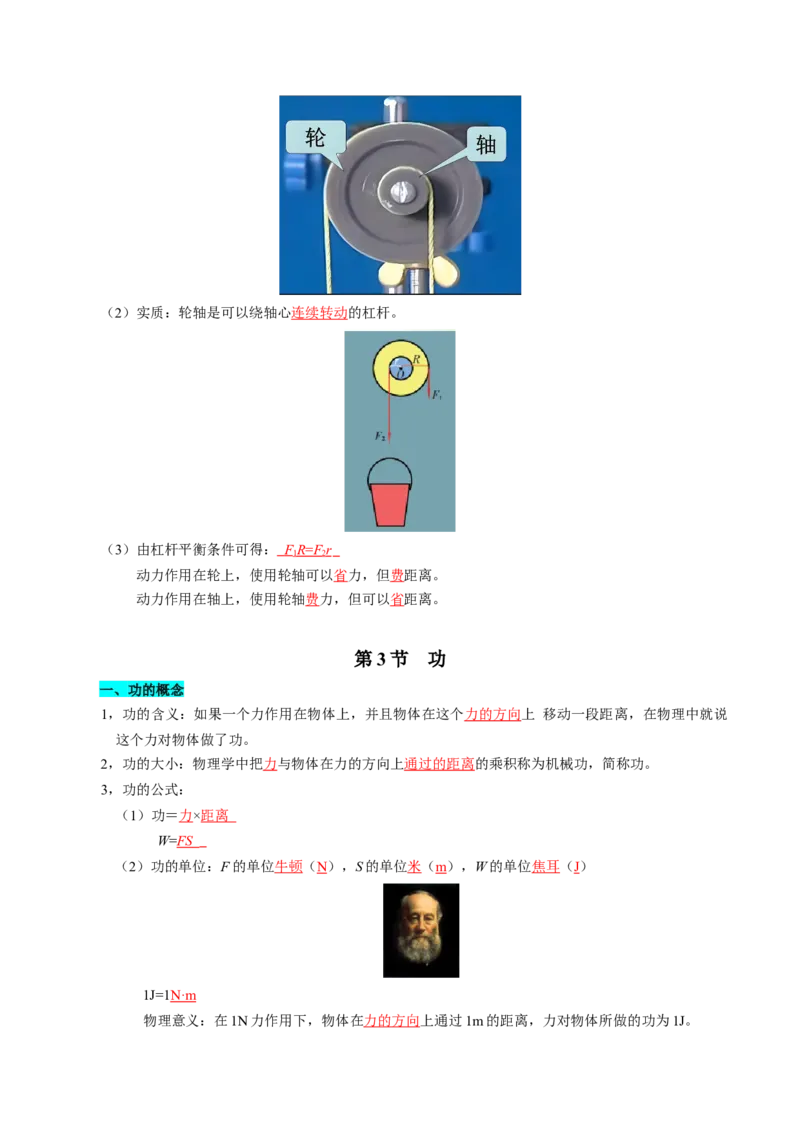
五、轮轴
(1)构造:
轮轴由具有公共转轴的轮和轴组成。(2)实质:轮轴是可以绕轴心连续转动的杠杆。
(3)由杠杆平衡条件可得: F R = F r
1 2
动力作用在轮上,使用轮轴可以省力,但费距离。
动力作用在轴上,使用轮轴费力,但可以省距离。
第3节 功
一、功的概念
1,功的含义:如果一个力作用在物体上,并且物体在这个力的方向上 移动一段距离,在物理中就说
这个力对物体做了功。
2,功的大小:物理学中把力与物体在力的方向上通过的距离的乘积称为机械功,简称功。
3,功的公式:
(1)功=力×距离
W= FS
(2)功的单位:F的单位牛顿(N),S的单位米(m),W的单位焦耳(J)
1J=1N·m
物理意义:在1N力作用下,物体在力的方向上通过1m的距离,力对物体所做的功为1J。单位大小:把一个鸡蛋从地面拿起并举过头顶,所做的功就是是1J。
W W
(3)变形公式F= S=
S F
二、做功的两个必要条件
1,做功的两个必然的条件:
①有力的作用。
②在力的方向上通过一段距离。
把一箱报刊办起来
2,不做功的几种情况
①有力没有距离。
花了很大的力气,汽车还是不动
②有距离无力。足球被踢后,在草地上滚了一段距离
③力与物体通过的距离垂直(F⊥S)。
背书包在水平路面匀速前进
三、功的计算
1,运用功的公式计算:力的单位必须为N,距离的单位必须为m,得到的单位才是J。
2,克服重力做功:W=FS=Gh
3,克服摩擦力做功:W=FS=fS
第4节 功率
一、功率的概念
1. 功率的含义:
物理学中用功率来表示物体做功快慢的物理量。
2. 功率的大小
物体单位时间内所做的功。
3. 功率的公式
(1)功率= 功 ÷ 时间 。
W
(2)公式: P=
t
(3)功率的单位:W的单位焦耳(J),t的单位秒(s),P的单位瓦特(W)。
1W=1J/s物理意义:物体每1s 所做的功为1J.
常用单位:千瓦(kW)、兆瓦(MW)。
1kW=103W 1MW= 10 6 W
单位大小:
人骑自行车的功率约50~100W 轿车发动机的功率约100kW
二、估测人上楼的功率
1. 实验原理:
W Gℎ mgℎ
P= = =
t t t
2. 测量的物理量:
人的质量 m 、 上楼的高度 h 和上楼的时间t
3. 测量工具:
体重计、卷尺和秒表
4. 中学生上楼的功率:
(1)缓步上楼约100W
(2)快步上楼约200W
三、功率的计算
1. 功率的推导公式:
(作用在物体上的力为F,物体以速度v做匀速直线运动)
2. 上楼功率公式:
3. 跳绳/人体向上功率:
( n为在时间t内完成的数量)
第5节 机械效率一、有用功、额外功和总功
1. 有用功:为实现目的所做的功。
初中部分使用机械的目的有两个:一是提升物体,此类有用功是克服重力所做的功;
二是水平移动物体,此类有用功是克服摩擦力所做的功。
2. 额外功:利用机械做功时,不是我们目的,但又不得不做的那部分功。
通常两类:一是克服机械重力所做的功;
二是克服摩擦(非水平移动时地面对物体的摩擦)所做的功。
3. 总功:对机械所做的功。
总功 = 有用功 + 额外功
W =W + W
总 有用功 额外
二、机械效率
1. 机械效率的概念:
(1)物理学中把有用功与总功的比值称为机械效率。
(2)机械效率表示利用机械做功时,有用功在总功中的占比。因此机械效率是没有单位的。
(3)因为总功等于有用功与额外功的和,而额外功是大于零的,所以有用功一定小于总功,即机械
效率小于 1,机械效率是用百分数表示的,反映了机械的性能好坏。
W
(4)机械效率的计算公式:η= 有×100%
W
总
2. 影响机械效率大小的因素:
(1)在额外功一定时,增大有用功可提高机械效率。
如利用滑轮组提升重物时,增大被提升物体的重力,可提高机械效率,因此同一滑轮组的机
械效率不是固定不变的。
(2)在有用功一定时,减小额外功可提高机械效率。
如利用不同滑轮组提升同一重物时,选用重力较小的动滑轮,可提高机械效率。
(3)当有用功和额外功一定时,机械效率不变。
如利用同一滑轮组提升同一重物时,改变绳子的绕法,可改变作用在绳端的拉力,但滑轮组
机械效率保持不变。
机械效率大小与是否省力、省多少力无关。
如利用同一滑轮组提升同一重物时,改变重物提升高度,有用功和额外功同时增大,但有用功
与总功的比值不变,即滑轮组机械效率保持不变。
机械效率大小与有用功、额外功的大小无关,与做功的快慢无关,只与有用功与额外功的比值
有关。

