 夜雨聆风
夜雨聆风导言
这份 NM 源码来自 ISOLAR 工程整理结果,主体是 CanNm 协议栈模块。其他目录和文件主要是为了让 CanNm 能够按当前工程需要完成编译、联调或移植而集成进来的支撑接口。
从源码结构上看,这套工程的分析重点应该放在 CanNm 目录。它负责 CAN 网络管理报文的收发、网络状态维护、状态机切换、定时器处理以及和上层 Nm 模块之间的接口交互。
1. 顶层目录结构
当前源码的顶层结构如下:
NM└── NM ├── CanNm │ ├── api │ ├── src │ └── integration └── Integration ├── ComStack ├── Nm_Integeration ├── Platform └── Standard整体可以分成两大部分:
• CanNm:CAN Network Management 模块本体,是这份协议栈源码的主体。• Integration:按工程需要集成的外部依赖、基础类型、桩函数和适配文件。
如果用 AUTOSAR 模块关系来理解,CanNm 是本文要分析的主体模块,但它不能完全脱离上下游接口运行。它上面会和 Nm、ComM 交互,下面会和 CanIf、CanSM、PduR 等模块交互,同时还依赖 Det、SchM、Std_Types、ComStack_Types 等基础服务。当前工程中这些模块并不是分析重点,而是根据 CanNm 移植和联调需要补进来的支撑部分。
2. CanNm:源码分析的核心目录
CanNm 是这套源码中最重要的目录,对应 AUTOSAR 里的 CAN Network Management 模块。它的核心职责是通过 CAN NM 报文维护网络管理状态,实现网络请求、网络释放、Repeat Message、Ready Sleep、Prepare Bus Sleep、Bus Sleep 等状态流转。
目录结构如下:
CanNm├── api├── src└── integration2.1 CanNm/api:对外接口声明
api 目录主要存放 CanNm 对外暴露的头文件。
主要文件包括:
CanNm.hCanNm_Cbk.hCanNm_Inl.h其中 CanNm.h 是最重要的公开接口文件,里面声明了 CanNm 的标准 API,例如:
CanNm_InitCanNm_PassiveStartUpCanNm_NetworkRequestCanNm_NetworkReleaseCanNm_DisableCommunicationCanNm_EnableCommunicationCanNm_SetUserDataCanNm_GetUserDataCanNm_GetNodeIdentifierCanNm_GetLocalNodeIdentifierCanNm_GetPduDataCanNm_GetStateCanNm_RepeatMessageRequestCanNm_TransmitCanNm_TriggerTransmitCanNm_RxIndicationCanNm_TxConfirmationCanNm_MainFunction从这些 API 可以看出,CanNm 的功能大致可以分成几类:
• 初始化与版本信息。 • 网络请求与网络释放。 • 通信使能与禁止。 • UserData 读写。 • 节点 ID 和 PDU 数据获取。 • 状态查询。 • NM 报文发送、接收、发送确认。 • 周期主函数调度。
CanNm_Cbk.h 主要和回调接口相关。CanNm 作为通信栈中的模块,会被下层模块通知报文接收、发送确认等事件,因此需要单独定义 callback 类接口。
CanNm_Inl.h 文件体积较大,里面包含大量内部 inline 函数。虽然它放在 api 目录下,但从用途上看,它更接近 CanNm 内部逻辑的一部分。后续分析状态机和定时器时,这个文件需要重点关注。
2.2 CanNm/src:模块实现主体
src 是 CanNm 的真正实现目录,也是后续源码分析的重点。
这个目录中的文件命名非常清晰,基本上一个 API 或一个功能点对应一个 .c 文件,例如:
CanNm.cCanNm_Init.cCanNm_NetworkRequest.cCanNm_NetworkRelease.cCanNm_PassiveStartup.cCanNm_ChangeState.cCanNm_RxIndication.cCanNm_TxConfirmation.cCanNm_TriggerTransmit.cCanNm_Transmit.cCanNm_SetUserData.cCanNm_GetUserData.cCanNm_GetState.cCanNm_GetPduData.cCanNm_CheckRemoteSleepIndication.cCanNm_ConfirmPnAvailability.c其中 CanNm.c 是主流程文件,里面实现了 CanNm_MainFunction。
CanNm_MainFunction 是 CanNm 的周期调度入口。它会遍历所有配置的 NM channel,然后调用内部处理函数执行状态机逻辑。可以把它理解成整个 CanNm 模块的主循环。
主流程大致包括:
• 判断 CanNm 是否已经初始化。 • 遍历所有配置的 channel。 • 处理 RxIndication 标志。 • 处理 TxConfirmation 标志。 • 更新软件定时器。 • 根据当前 NM mode 和 state 执行状态机。 • 处理 ERA/EIRA、PN 等扩展逻辑。
CanNm_Prv.h 是内部私有头文件,里面定义了大量内部宏、DET 错误检查宏、状态机辅助宏、配置访问宏和内部数据类型。它是理解 CanNm 内部实现风格的关键文件。
配置相关文件包括:
CanNm_Cfg.cCanNm_Cfg.hCanNm_Cfg_Internal.hCanNm_PBcfg.cCanNm_PBcfg.h这些文件负责描述 CanNm 的通道数量、PDU 长度、定时参数、功能开关、Post-Build 配置等。
AUTOSAR BSW 模块通常不是把所有逻辑写死在代码中,而是通过大量配置项裁剪功能。因此分析 CanNm 时,不能只看 .c 文件,还必须结合配置文件一起看。
2.3 CanNm/integration:CanNm 自身集成适配
CanNm/integration 目录存放 CanNm 模块自身相关的集成文件。
主要文件包括:
CanNmAppl.cCanNmSetDynamicNodeId.cCanNmSetDynamicNodeId.hCanNm_Cfg_SchM.hCanNm_Cfg_SchM.h 和 SchM 临界区相关,用于保护 CanNm 内部共享数据访问。
在 CanNm_MainFunction 中可以看到类似下面的临界区调用:
SchM_Enter_CanNm_MainFunctionNoNest();SchM_Exit_CanNm_MainFunctionNoNest();这说明 CanNm 在处理接收标志、发送确认标志、控制位等共享数据时,需要考虑中断上下文和主函数上下文之间的并发访问。
CanNmAppl.c 更偏应用层适配,通常用于放用户扩展、应用回调或项目集成时需要补充的函数。
CanNmSetDynamicNodeId.c 从命名看是动态设置 Node ID 的功能适配文件,属于具体项目中可能会使用的扩展能力。
3. Integration:外部依赖与集成桩
Integration 目录不是协议栈主体,也不是本文的核心分析对象。它是为了让 CanNm 能够在当前工程中运行、编译或分析而按需集成的外部模块接口。
CanNm 作为 AUTOSAR BSW 模块,依赖很多其他模块,例如:
• Nm• ComM• CanIf• CanSM• PduR• Det• SchM• Std_Types• ComStack_Types• Platform_Types
在真实 AUTOSAR 工程中,这些依赖由其他 BSW 模块提供。当前源码中的 Integration 目录则提供了这些模块的头文件、类型定义或简化桩函数。
3.1 Integration/ComStack:通信栈通用类型
ComStack 目录中主要包含:
ComStack_Cfg.hapi/ComStack_Types.h这里定义通信栈常用类型,例如:
PduIdTypePduInfoTypeNetworkHandleTypeCanNm 的收发接口都依赖这些类型,例如:
CanNm_Transmit(PduIdType CanNmTxPduId, const PduInfoType * PduInfoPtr)CanNm_TriggerTransmit(PduIdType TxPduId, PduInfoType* PduInfoPtr)因此,ComStack 是理解 CanNm 报文收发接口的基础。
3.2 Integration/Standard:AUTOSAR 标准基础类型
Standard 目录中主要是:
Std_Types.h这里定义 AUTOSAR 标准类型和返回值,例如:
Std_ReturnTypeE_OKE_NOT_OKStd_VersionInfoType这些是所有 BSW 模块都会使用的基础定义。
3.3 Integration/Platform:平台相关类型
Platform 目录中包含:
Platform_Types.hapi/Platform_AddOn_Types.hintegration/Platform_Types_Cfg.h这里定义平台相关的基础数据类型,例如:
uint8uint16uint32booleanAUTOSAR 为了保证跨编译器、跨芯片平台的一致性,会统一封装基础类型。因此 CanNm 代码中不会直接大量使用 C 标准类型,而是使用 AUTOSAR 风格类型。
3.4 Integration/Nm_Integeration:Nm 模块适配
目录中包含:
CanNm_Interface.cCanNm_MemMap.hCanSM_TxTimeoutException.hNm.cNm.hNmStack_Types.hNm_Cbk.hSchM_CanNm.h这部分非常重要,因为 CanNm 是总线相关 NM 模块,而 Nm 是网络管理抽象层。
可以简单理解为:
• Nm向上对ComM或应用层提供统一 NM 接口。• CanNm向下负责 CAN 总线上的 NM 报文和状态机。• Nm和CanNm之间通过接口和回调连接。
当前 Nm.c 中已经实现了一些回调函数,例如:
Nm_NetworkStartIndicationNm_RepeatMessageIndicationNm_NetworkModeNm_StateChangeNotificationNm_PrepareBusSleepModeNm_BusSleepModeNm_TxTimeoutExceptionNm_PduRxIndication其中 Nm_StateChangeNotification 里还调用了 CanNm_SetUserData,根据当前状态设置 NM UserData 中的 RMS 标志位。这说明这份源码不仅是纯 CanNm 标准实现,还带了一点项目应用逻辑。
3.5 ComM 相关文件:通信管理模块接口
Integration 顶层还有一些 ComM 相关文件:
ComM.hComM_BusSM.hComM_Interface.cComM_Types.hComM 是 AUTOSAR Communication Manager,用于管理通信请求。
在完整 AUTOSAR 架构中,应用或 SWC 通常不会直接控制总线通信,而是通过 ComM 请求通信模式。ComM 再和 Nm、BusSM 等模块交互,最终影响 CanNm 的网络请求和释放。
当前这些文件更像是简化版接口或桩文件,主要用于满足 CanNm 的编译和接口依赖。
3.6 Det:开发错误检测
Integration 中包含:
Det.cDet.hDet 是 AUTOSAR Development Error Tracer。CanNm 里大量使用 DET 宏做参数检查、初始化状态检查、通道合法性检查等。
例如在 CanNm_Prv.h 中可以看到类似错误上报宏:
CANNM_DET_REPORT_ERRORCANNM_DET_REPORT_ERROR_NOK当开发错误检测开关打开时,这类宏会调用 Det_ReportError 上报错误。
4. 这套源码体现出的模块关系
从目录和文件命名可以看出,这份源码大致符合下面的 AUTOSAR NM 调用关系:
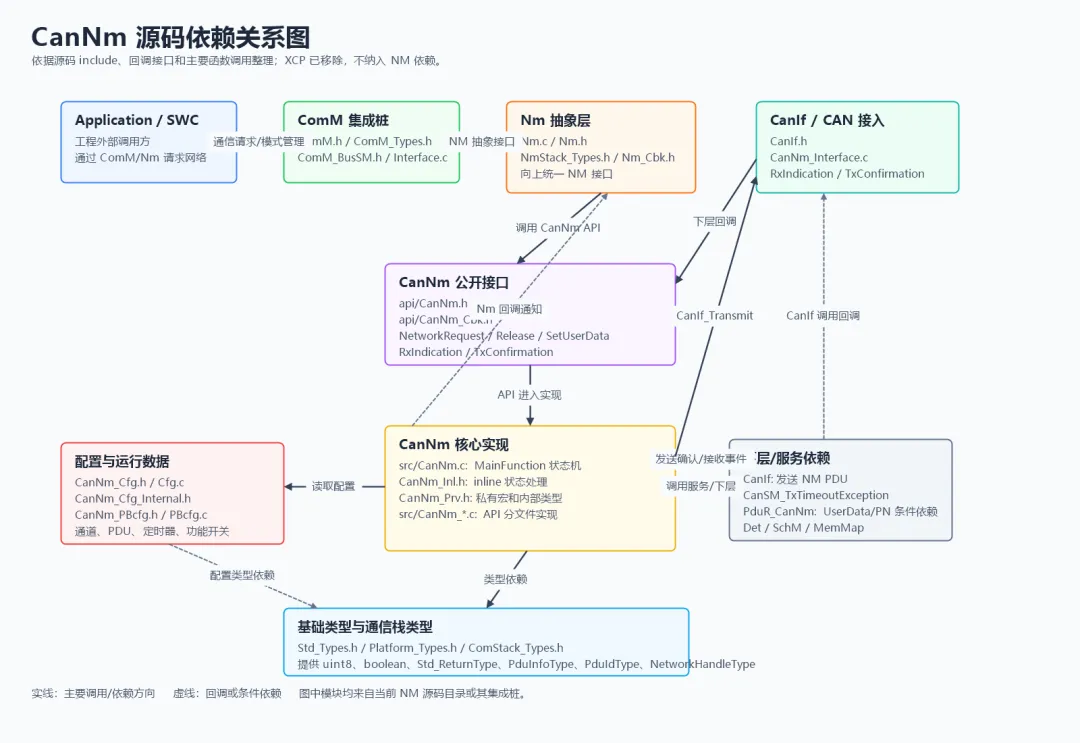
其中:
• ComM负责通信模式管理。• Nm负责网络管理抽象。• CanNm负责 CAN 总线上的网络管理实现。• CanIf负责 CAN 接口抽象。• CAN Driver负责底层硬件发送和接收。
这份源码的主体是 CanNm。Nm、ComM、基础类型、开发错误检测等文件属于按需集成的支撑部分,主要用于体现 CanNm 的上下游接口边界。
5. CanNm 对 CanIf 的依赖
如果要把当前 CanNm 模块移植进自己的工程,最先要确认的不是状态机,而是 CanNm 和 CanIf 之间的接口边界。
从当前源码看,CanNm 对 CanIf 的直接依赖可以分成两类:
• CanNm 主动调用 CanIf 的 API。 • CanIf 反向调用 CanNm 的 callback。
5.1 CanNm 主动调用的 CanIf API
当前源码中,CanNm 直接调用 CanIf 的核心 API 是:
Std_ReturnType CanIf_Transmit(PduIdType TxPduId, const PduInfoType * PduInfoPtr);调用位置在 CanNm_Inl.h 的 CanNm_MessageTransmit 中:
RetValOfFuncs_ui = CanIf_Transmit(ConfigPtr_pcs->TxPduId, &(RamPtr_ps->Pdu_s));这个函数是 CanNm 发 NM PDU 的统一出口。也就是说,不管是周期发送、主动网络请求、总线同步请求,还是带 UserData 的触发发送,最终都会走到 CanNm_MessageTransmit,再由它调用 CanIf_Transmit。
当前源码中调用 CanNm_MessageTransmit 的典型位置包括:
• CanNm.c:周期主函数中发送 NM PDU。• CanNm_RequestBusSynchronization.c:请求总线同步时触发单帧发送。• CanNm_SetSleepReadyBit.c:设置 Coordinator Sleep Ready Bit 后触发发送。• CanNm_Transmit.c:PduR 触发带 UserData 的 NM PDU 发送。
因此移植时,CanIf 至少要提供 CanIf_Transmit,并且它的行为要满足下面几点:
• 入参 TxPduId能映射到实际 CAN NM 报文。• 入参 PduInfoPtr->SduDataPtr指向 CanNm 内部维护的发送 buffer。• 入参 PduInfoPtr->SduLength是 NM PDU 长度,需要和项目 CanIf 配置一致。• 返回 E_OK表示 CanIf 已接受发送请求。• 返回 E_NOT_OK表示发送请求未被接受,CanNm 会停止本次发送超时监控,等待后续周期重试或由上层再次触发。
移植到新工程时,ConfigPtr_pcs->TxPduId 必须和 CanIf 里的 Tx L-PDU 配置一致,否则 CanNm 即使运行正常,也无法把 NM 报文发到正确的 CAN ID 上。
这里还可以顺带注意一个源码注释里的拼写问题:CanNm_Inl.h 中 CanNm_MessageTransmit 的说明写成了 CanIf_Tranmsit,正确拼写应为 CanIf_Transmit。源码实际调用的函数名是正确的:
CanIf_Transmit(ConfigPtr_pcs->TxPduId, &(RamPtr_ps->Pdu_s));5.2 CanIf 需要回调 CanNm 的接口
CanNm 不只是调用 CanIf。CanIf 收到 NM 报文或发送完成后,也必须回调 CanNm。
这些回调在 CanNm_Cbk.h 中声明:
void CanNm_RxIndication(PduIdType RxPduId, const PduInfoType * PduInfoPtr);void CanNm_TxConfirmation(PduIdType TxPduId, Std_ReturnType result);其中 CanNm_RxIndication 用于接收 NM 报文。
当 CanIf 收到配置给 CanNm 的 NM Rx PDU 后,需要把接收到的数据封装成 PduInfoType,然后调用:
CanNm_RxIndication(RxPduId, &PduInfo);当前源码里 Integration/Nm_Integeration/CanNm_Interface.c 已经给了一个简化适配示例:
void CanNm_Indication(uint8_t index, uint32_t canid, uint8_t dlc, uint8_t* data_ptr){ PduInfoType Pdu; Pdu.SduDataPtr = data_ptr; Pdu.SduLength = dlc; CanNm_RxIndication(0, &Pdu);}这个例子里直接把 RxPduId 写成了 0。真实工程中不建议这样写死,而是应该根据 CAN ID 或 CanIf Rx PDU ID 映射到对应的 CanNm channel。
CanNm_TxConfirmation 用于发送确认。
当 CanIf 确认某个 NM Tx PDU 已经发送完成后,需要调用:
CanNm_TxConfirmation(TxPduId, E_OK);CanNm 内部会设置 TxConfirmation_b,主函数后续会根据这个标志处理发送状态、超时监控和状态机推进。
5.3 TriggerTransmit 接口
当前源码还实现了:
Std_ReturnType CanNm_TriggerTransmit(PduIdType TxPduId, PduInfoType* PduInfoPtr);这个接口不是 CanNm 主动调用 CanIf 的 API,而是给下层模块在 TriggerTransmit 机制下反向取数使用的。
移植时只需要确认目标工程是否使用 TriggerTransmit。如果使用,需要在 CanIf 配置中把对应 Tx PDU 配成触发发送模式,并确保 CanIf 在需要数据时调用 CanNm_TriggerTransmit;如果不使用,则主发送路径仍然是 CanNm 准备好 PduInfoType 后调用 CanIf_Transmit。
6. 当前 CanNm 模块如何移植进工程
移植这套 CanNm 源码时,可以按下面顺序处理。核心思路是先让基础类型和配置能编译,再接 CanIf 收发,最后接 Nm/ComM 的上层流程。
6.1 准备基础头文件和类型
CanNm 依赖 AUTOSAR 风格的基础类型,至少需要保证下面这些文件或等价定义可用:
Std_Types.hPlatform_Types.hComStack_Types.hNmStack_Types.h这些文件提供:
• uint8、uint16、uint32、boolean• Std_ReturnType• E_OK、E_NOT_OK• PduIdType• PduInfoType• NetworkHandleType• Nm_StateType• Nm_ModeType
如果目标工程已经有 AUTOSAR 基础类型文件,优先使用工程已有版本,不建议重复引入两套 Std_Types.h 或 Platform_Types.h,否则很容易出现类型重复定义。
6.2 移植 CanNm 源码和配置
需要纳入工程的 CanNm 文件主要包括:
CanNm/api/*.hCanNm/src/*.cCanNm/src/*.hCanNm/integration/CanNm_Cfg_SchM.hCanNm/integration/CanNmAppl.cCanNm/integration/CanNmSetDynamicNodeId.c配置文件重点是:
CanNm_Cfg.hCanNm_Cfg_Internal.hCanNm_Cfg.cCanNm_PBcfg.hCanNm_PBcfg.c移植后要重点检查:
• CANNM_NUMBER_OF_CHANNELS是否和工程实际 CAN NM 通道数量一致。• PduLength_u8是否和 NM 报文 DLC 一致。• NodeIdPos_u8和ControlBitVectorPos_u8是否符合项目 NM PDU 格式。• TxPduId是否和 CanIf 的 Tx PDU ID 一致。• MessageCycleTime、MsgTimeoutTime、RepeatMessageTime等定时参数是否符合项目需求。• CANNM_PASSIVE_MODE_ENABLED、CANNM_USER_DATA_ENABLED、CANNM_COM_USER_DATA_SUPPORT、CANNM_GLOBAL_PN_SUPPORT等功能开关是否符合目标工程。
6.3 对接 CanIf
这是移植中最关键的一步。
目标工程的 CanIf 至少要完成三件事:
第一,提供 CanIf_Transmit。
Std_ReturnType CanIf_Transmit(PduIdType TxPduId, const PduInfoType * PduInfoPtr);这个函数要能根据 TxPduId 找到实际 CAN ID、CAN controller、DLC 和发送 mailbox,然后把 PduInfoPtr->SduDataPtr 中的 NM 数据发送出去。
第二,接收 NM 报文后调用 CanNm_RxIndication。
CanNm_RxIndication(RxPduId, &PduInfo);这里的 RxPduId 应该是 CanNm 能识别的 channel 或映射后的 PDU ID。当前源码在 RxIndication 中会用它访问:
CanNm_RamData_s[RxPduId]CANNM_GET_CHANNEL_CONFIG(RxPduId)所以这个 ID 不能随便传。单通道工程可以先用 0,多通道工程必须做明确映射。
第三,发送完成后调用 CanNm_TxConfirmation。
CanNm_TxConfirmation(TxPduId, E_OK);同样,TxPduId 必须能映射到 CanNm channel。否则 CanNm 会找错 RAM 数据,轻则状态不推进,重则访问错误通道。
6.4 对接 Nm 和 ComM
当前源码中已经有简化的 Nm.c、Nm.h、ComM_Interface.c。如果目标工程有完整 AUTOSAR Nm 和 ComM,应优先使用工程已有模块。
如果目标工程没有完整 Nm/ComM,而只是希望先让 CanNm 跑起来,可以先保留当前这些集成桩:
Integration/Nm_Integeration/Nm.cIntegration/Nm_Integeration/Nm.hIntegration/Nm_Integeration/Nm_Cbk.hIntegration/ComM.hIntegration/ComM_Types.hIntegration/ComM_BusSM.hIntegration/ComM_Interface.c但要注意,这些桩函数只能满足基础联调,不等价于完整 AUTOSAR ComM/Nm。
6.5 对接 SchM、Det 和 MemMap
CanNm 使用 SchM 保护临界区,例如:
SchM_Enter_CanNm_MainFunctionNoNest();SchM_Exit_CanNm_MainFunctionNoNest();如果目标工程有 OS 或 SchM,应把这些宏接到真实的临界区保护。裸机工程中可以先接成关中断/开中断,或者在确认没有并发访问风险时临时做空实现。
Det 用于开发错误检测。调试阶段建议保留 Det_ReportError,这样参数错误、未初始化调用、PDU ID 错误会更容易定位。
CanNm_MemMap.h 用于 AUTOSAR 内存段映射。如果目标工程没有严格的 MemMap 机制,可以先做成空宏适配,但要保证所有 CANNM_START_SEC_* 和 CANNM_STOP_SEC_* 宏都能被正确包含和消解。
6.6 初始化和周期调度
移植完成后,启动流程至少应包含:
CanNm_Init(NULL);如果工程使用 Pre-Compile 变体,初始化参数通常不承载实际配置;如果工程使用 Post-Build 变体,则必须传入有效配置。
运行时必须周期调用:
CanNm_MainFunction();调用周期要和配置中的 CanNm 主函数周期匹配。CanNm 的状态机、定时器、周期发送、超时检测都依赖这个主函数推进。如果只初始化不周期调用,模块不会正常发送 NM 报文,也不会完成状态迁移。
6.7 最小移植检查清单
最小可运行版本可以按下面清单检查:
• CanNm_Init被调用,且配置指针正确。• CanNm_MainFunction被周期调用。• CanIf_Transmit能发送实际 CAN NM 报文。• CanIf 接收 NM 报文后能调用 CanNm_RxIndication。• CanIf 发送完成后能调用 CanNm_TxConfirmation。• TxPduId、RxPduId和 CanNm channel 映射正确。• PduInfoType.SduDataPtr和SduLength正确。• CanNm_Cfg中的 PDU 长度、Node ID、CBV 位置和项目协议一致。• SchM 临界区、Det、MemMap 已完成适配。 • 如果使用 UserData、PN 或 Com UserData,PduR 相关接口也要补齐。
7. 小结
这份 NM 源码的核心是 CanNm。其中:
• api定义对外接口。• src实现模块逻辑。• integration放 CanNm 自身集成文件。• 外层 Integration目录提供 AUTOSAR 其他模块的依赖接口和基础类型。
从源码结构看,它是一份典型的 AUTOSAR CanNm 模块实现。后续分析时,应围绕三个关键词展开:
• 配置。 • 状态机。 • 报文收发。
只要抓住这三条主线,CanNm 的源码就不会显得零散。后续文章可以从初始化开始,一步步进入 CanNm_MainFunction,再展开网络请求、状态迁移和 NM 报文收发流程。
