
文档内容
2025 年山东省新高考物理试卷
一、单项选择题:本题共8小题,每小题3分,共24分。每小题只有一个选项符合题目要求。
1.(3分)在光电效应实验中,用频率和强度都相同的单色光分别照射编号为1、2、3的金属,所得遏止电压如图
所示,关于光电子最大初动能Ek 的大小关系正确的是( )
A.Ek1 >Ek2 >Ek3 B.Ek2 >Ek3 >Ek1
C.Ek3 >Ek2 >Ek1 D.Ek3 >Ek1 >Ek2
【解析】根据光电子最大初动能与遏止电压的关系得:
Ek =eUc
由图像得:
Uc2 >Uc3 >Uc1
则有:
Ek2 >Ek3 >Ek1, B正确,ACD错误;
故选:B。
2.(3 分)分子间作用力 F与分子间距离r的关系如图所示,若规定两个分子间距离 r等于r0 时分子势能Ep 为零,
则( )
A.只有r大于r0 时,Ep 为正
B.只有r小于r0 时,Ep 为正
C.当r不等于r0 时,Ep 为正
D.当r不等于r0 时,Ep 为负
【解析】规定两个分子间距离 r 等于 r0 时分子势能为零,从 r0 处随着距离的增大,根据分子力随分子距离的变
化关系可知,此时分子间作用力表现为引力,分子间作用力做负功,故分子势能增大;从r0 处随着距离的减小,
此时分子间作用力表现为斥力,分子间作用力也做负功,分子势能也增大;故可知当r不等于r0 时,Ep 为正,C
正确,ABD错误。
故选:C。
3.(3分)用如图所示的装置观察光的干涉和偏振现象。狭缝S1 、S2 关于OO′轴对称,光屏垂直于OO′轴放置。
将偏振片P1 垂直于OO′轴置于双缝左侧,单色平行光沿OO′轴方向入射,在屏上观察到干涉条纹,再将偏振
片 P2 置于双缝右侧,P1 、P2 透振方向平行。保持 P1 不动,将 P2 绕 OO′轴转动 90°的过程中,关于光屏上的
干涉条纹,下列说法正确的是( )A.条纹间距不变,亮度减小
B.条纹间距增大,亮度不变
C.条纹间距减小,亮度减小
D.条纹间距不变,亮度增大
𝐿
【解析】根据双缝干涉条纹间距公式𝛥𝑥 = 𝜆可知,当P2 旋转时,L,d,λ 均不变,故条纹间距Δx不变;但随
𝑑
着P2 的旋转,由于透振方向与转过P2 后的方向互相垂直,则透过P2 的光强在减小,干涉条纹的亮度在减小,A
正确,BCD错误。
故选:A。
4.(3分)某同学用不可伸长的细线系一个质量为0.1kg的发光小球,让小球在竖直面内绕一固定点做半径为0.6m
1
的圆周运动。在小球经过最低点附近时拍摄了一张照片,曝光时间为 𝑠。由于小球运动,在照片上留下了一条
50
1
长度约为半径 的圆弧形径迹。根据以上数据估算小球在最低点时细线的拉力大小为( )
5
A.11N B.9N C.7N D.5N
1 1
【解析】在曝光时间内小球运动的长度为𝛥𝑙 = 𝑟 = ×0.6𝑚 =0.12𝑚,
5 5
𝛥𝑙 0.12
近似认为在曝光时间内小球做匀速直线运动,小球的线速度大小𝑣 = = 𝑚/𝑠 =6𝑚/𝑠
𝛥𝑡 1
50
𝑣2
在最低点,根据牛顿第二定律得𝑇−𝑚𝑔 =𝑚
𝑟
代入数据解得T=7N,C正确,ABD错误。
故选:C。
5.(3分)一辆电动小车上的光伏电池,将太阳能转换成的电能全部给电动机供电,刚好维持小车以速度 v匀速运
动,此时电动机的效率为50%。已知小车的质量为m,运动过程中受到的阻力f=kv(k为常量),该光伏电池的
光电转换效率为η,则光伏电池单位时间内获得的太阳能为( )
2𝑘𝑣2 𝑘𝑣2
A. B.
𝜂 2𝜂
𝑘𝑣2+𝑚𝑣2 2𝑘𝑣2+𝑚𝑣2
C. D.
2𝜂 𝜂2
【解析】小车做匀速直线运动,由平衡条件得F=f=kv
小车的机械功率P =Fv=kv2
机
𝑃
由于电动机的效率为η =50%,电动机的总功率P = 机 = 𝑘𝑣2 =2kv2
电动机 电 𝜂 50%
电动机
𝑃 𝑃
电 电 2𝑘𝑣2
光伏电池的光电转换效率为η,即𝜂 = ,则𝑃 = = ,
𝑃 阳 𝜂 𝜂
阳
2𝑘𝑣2
则光伏电池单位时间内获得的太阳能为 ,A正确,BCD错误。
𝜂
故选:A。
6.(3分)轨道舱与返回舱的组合体,绕质量为M的行星做半径为r的圆周运动,轨道舱与返回舱的质量比为5:1。
𝐺𝑀
如图所示,轨道舱在P点沿运动方向向前弹射返回舱,分开瞬间返回舱相对行星的速度大小为2√ ,G为引力
𝑟
常量,此时轨道舱相对行星的速度大小为( )A. 2 √ 𝐺𝑀 B. 3 √ 𝐺𝑀 C. 4 √ 𝐺𝑀 D.√ 𝐺𝑀
5 𝑟 5 𝑟 5 𝑟 𝑟
【解析】组合体绕行星做匀速圆周运动,万有引力提供向心力,设返回舱的质量为 m,则轨道舱的质量为 5m,
总质量为6m,设组合体的线速度大小为v,有:
𝑀⋅6𝑚 𝑣2
𝐺 =6𝑚
𝑟2 𝑟
解得:
𝐺𝑀
v=√
𝑟
弹射返回舱的过程,组合体动量守恒,取组合体的线速度方向为正方向,有
6mv=5mv1+mv2
解得:
4 𝐺𝑀
𝑣 = √
1 5 𝑟
C正确,ABD错误;
故选:C。
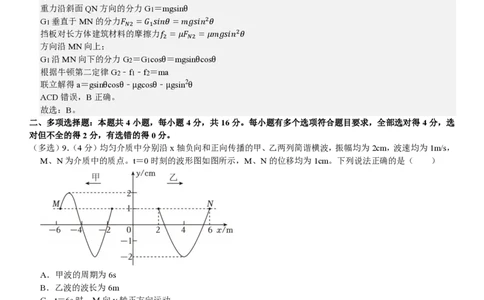
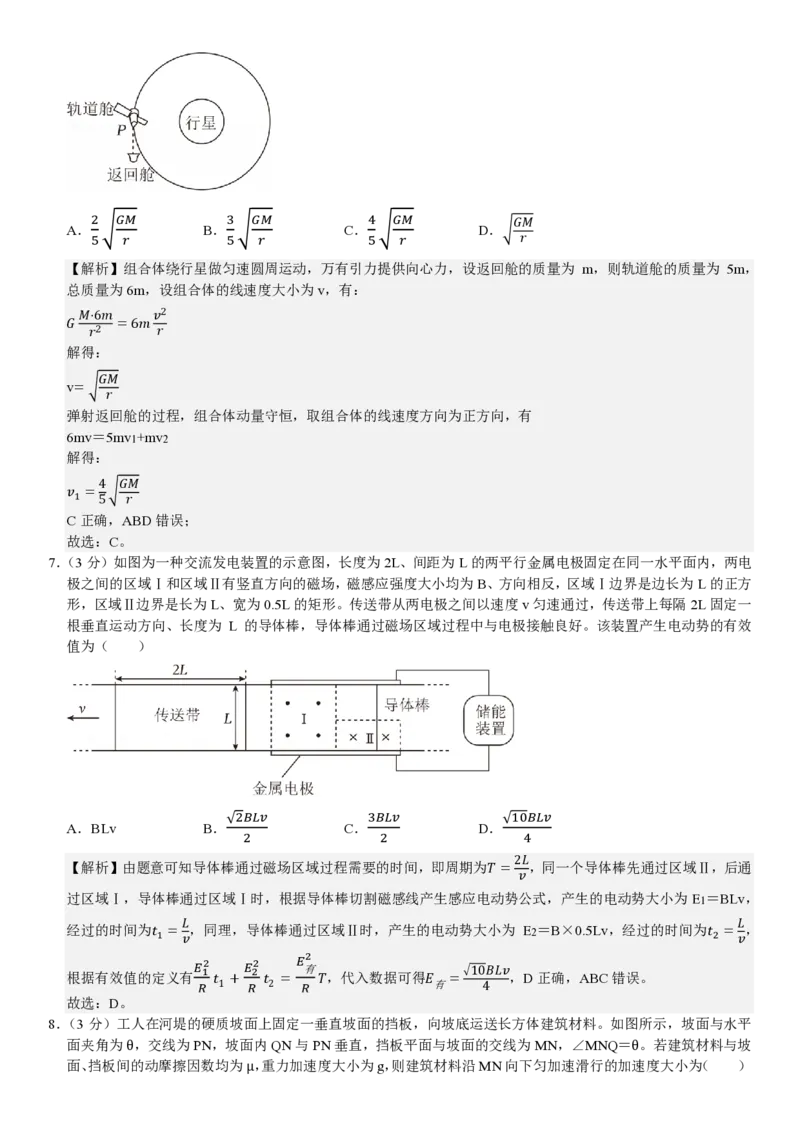
7.(3分)如图为一种交流发电装置的示意图,长度为2L、间距为L的两平行金属电极固定在同一水平面内,两电
极之间的区域Ⅰ和区域Ⅱ有竖直方向的磁场,磁感应强度大小均为B、方向相反,区域Ⅰ边界是边长为L的正方
形,区域Ⅱ边界是长为L、宽为0.5L的矩形。传送带从两电极之间以速度v匀速通过,传送带上每隔2L固定一
根垂直运动方向、长度为 L 的导体棒,导体棒通过磁场区域过程中与电极接触良好。该装置产生电动势的有效
值为( )
√2𝐵𝐿𝑣 3𝐵𝐿𝑣 √10𝐵𝐿𝑣
A.BLv B. C. D.
2 2 4
2𝐿
【解析】由题意可知导体棒通过磁场区域过程需要的时间,即周期为𝑇 = ,同一个导体棒先通过区域Ⅱ,后通
𝑣
过区域Ⅰ,导体棒通过区域Ⅰ时,根据导体棒切割磁感线产生感应电动势公式,产生的电动势大小为E1 =BLv,
𝐿 𝐿
经过的时间为𝑡
1
=
𝑣
,同理,导体棒通过区域Ⅱ时,产生的电动势大小为 E2 =B×0.5Lv,经过的时间为𝑡
2
=
𝑣
,
𝐸 1 2 𝐸 2 2 𝐸 有 2 √10𝐵𝐿𝑣
根据有效值的定义有 𝑡 + 𝑡 = 𝑇,代入数据可得𝐸 = ,D正确,ABC错误。
𝑅 1 𝑅 2 𝑅 有 4
故选:D。
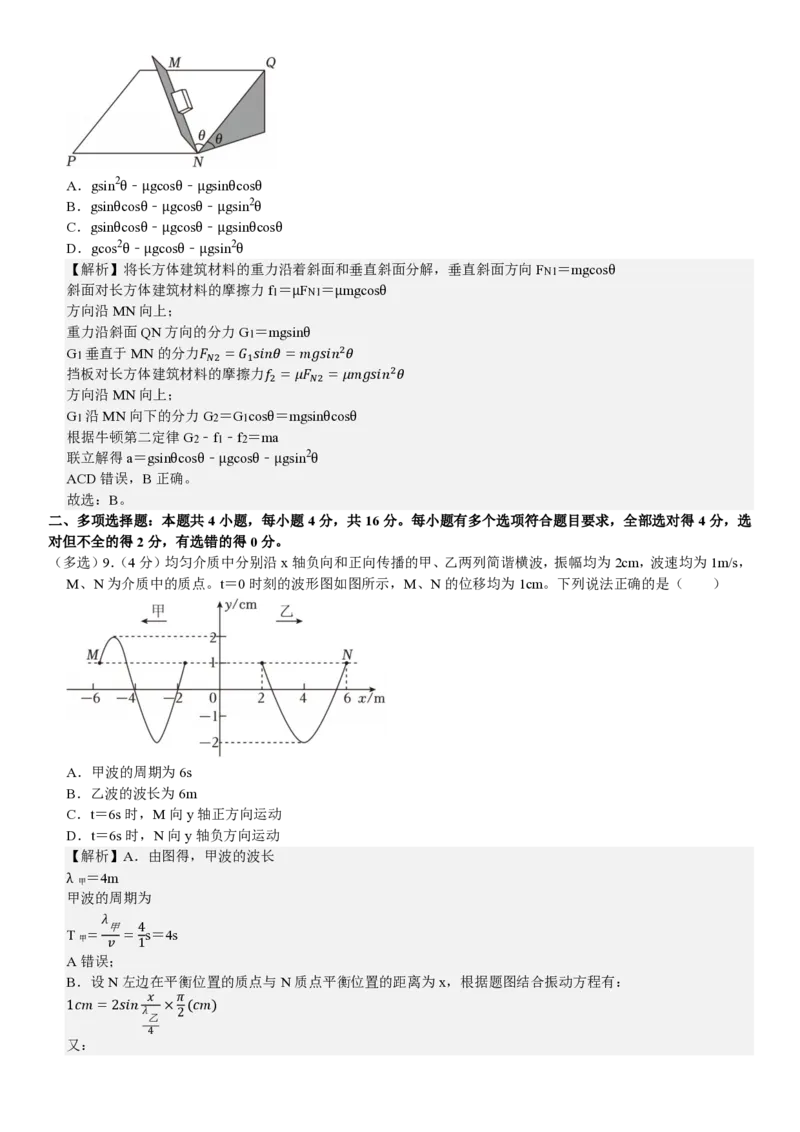
8.(3 分)工人在河堤的硬质坡面上固定一垂直坡面的挡板,向坡底运送长方体建筑材料。如图所示,坡面与水平
面夹角为θ,交线为PN,坡面内QN与PN垂直,挡板平面与坡面的交线为MN,∠MNQ=θ。若建筑材料与坡
面、挡板间的动摩擦因数均为μ,重力加速度大小为g,则建筑材料沿MN向下匀加速滑行的加速度大小为( )A.gsin2θ﹣μgcosθ﹣μgsinθcosθ
B.gsinθcosθ﹣μgcosθ﹣μgsin2θ
C.gsinθcosθ﹣μgcosθ﹣μgsinθcosθ
D.gcos2θ﹣μgcosθ﹣μgsin2θ
【解析】将长方体建筑材料的重力沿着斜面和垂直斜面分解,垂直斜面方向FN1 =mgcosθ
斜面对长方体建筑材料的摩擦力f1 =μFN1 =μmgcosθ
方向沿MN向上;
重力沿斜面QN方向的分力G1 =mgsinθ
G1 垂直于MN的分力𝐹
𝑁2
=𝐺
1
𝑠𝑖𝑛𝜃 =𝑚𝑔𝑠𝑖𝑛2𝜃
挡板对长方体建筑材料的摩擦力𝑓 =𝜇𝐹 =𝜇𝑚𝑔𝑠𝑖𝑛2𝜃
2 𝑁2
方向沿MN向上;
G1 沿MN向下的分力G2 =G1cosθ=mgsinθcosθ
根据牛顿第二定律G2 ﹣f1 ﹣f2 =ma
联立解得a=gsinθcosθ﹣μgcosθ﹣μgsin2θ
ACD错误,B正确。
故选:B。
二、多项选择题:本题共4小题,每小题4分,共16分。每小题有多个选项符合题目要求,全部选对得4分,选
对但不全的得2分,有选错的得0分。
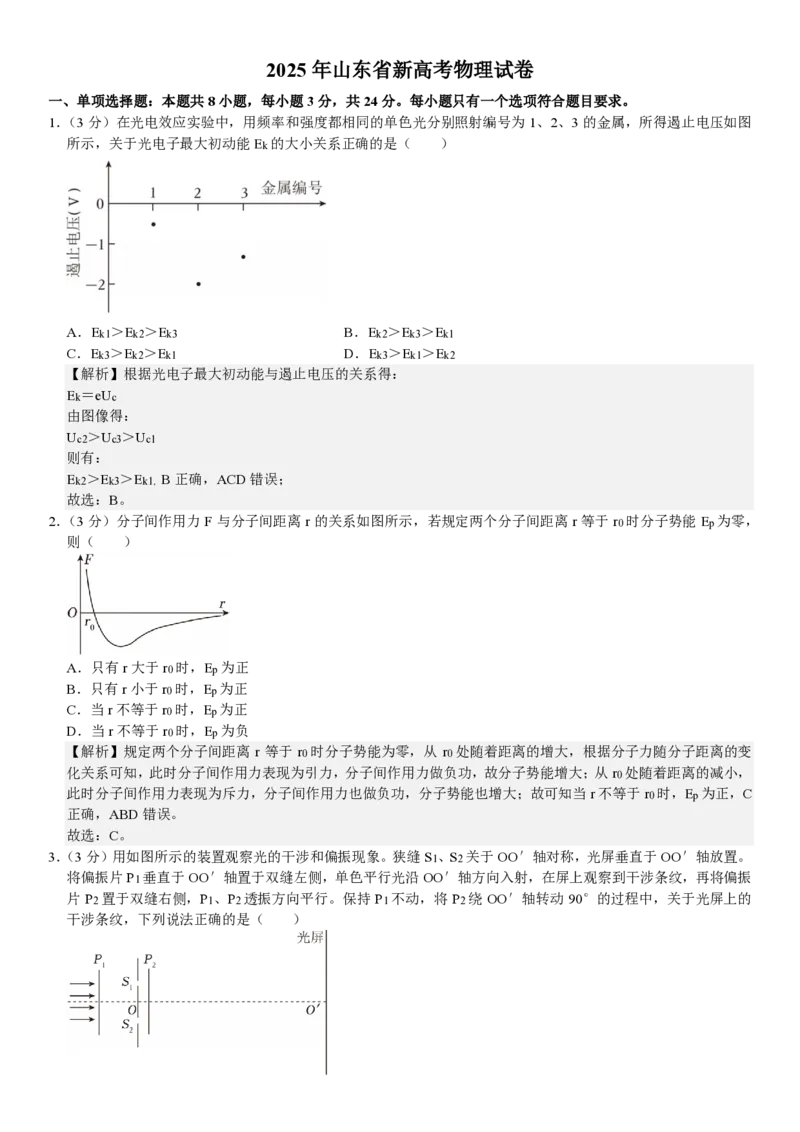
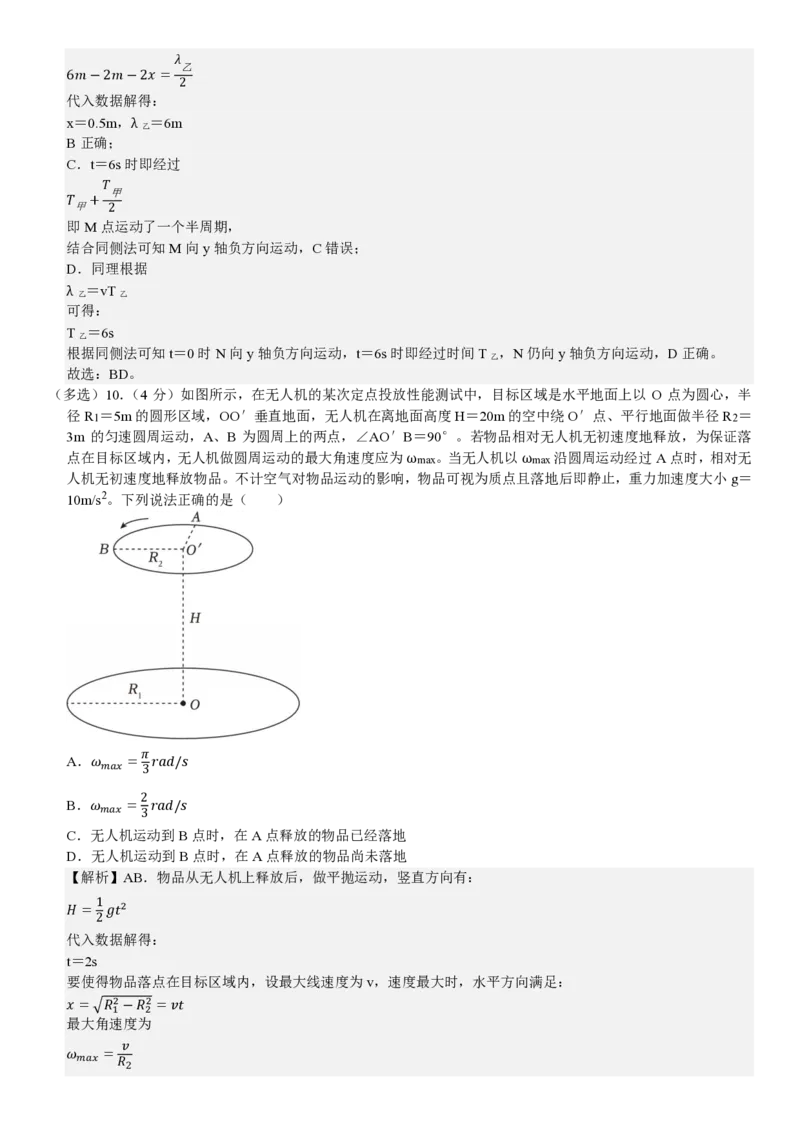
(多选)9.(4分)均匀介质中分别沿x轴负向和正向传播的甲、乙两列简谐横波,振幅均为2cm,波速均为1m/s,
M、N为介质中的质点。t=0时刻的波形图如图所示,M、N的位移均为1cm。下列说法正确的是( )
A.甲波的周期为6s
B.乙波的波长为6m
C.t=6s时,M向y轴正方向运动
D.t=6s时,N向y轴负方向运动
【解析】A.由图得,甲波的波长
λ =4m
甲
甲波的周期为
𝜆
甲 4
T = = s=4s
甲 𝑣 1
A错误;
B.设N左边在平衡位置的质点与N质点平衡位置的距离为x,根据题图结合振动方程有:
𝑥 𝜋
1𝑐𝑚 =2𝑠𝑖𝑛 × (𝑐𝑚)
𝜆 2
乙
4
又:𝜆
乙
6𝑚−2𝑚−2𝑥 =
2
代入数据解得:
x=0.5m,λ =6m
乙
B正确;
C.t=6s时即经过
𝑇
甲
𝑇 +
甲 2
即M点运动了一个半周期,
结合同侧法可知M向y轴负方向运动,C错误;
D.同理根据
λ =vT
乙 乙
可得:
T =6s
乙
根据同侧法可知t=0时N向y轴负方向运动,t=6s时即经过时间T ,N仍向y轴负方向运动,D正确。
乙
故选:BD。
(多选)10.(4 分)如图所示,在无人机的某次定点投放性能测试中,目标区域是水平地面上以 O 点为圆心,半
径R1 =5m的圆形区域,OO′垂直地面,无人机在离地面高度H=20m的空中绕O′点、平行地面做半径R2 =
3m 的匀速圆周运动,A、B 为圆周上的两点,∠AO′B=90°。若物品相对无人机无初速度地释放,为保证落
点在目标区域内,无人机做圆周运动的最大角速度应为ωmax 。当无人机以ωmax 沿圆周运动经过A点时,相对无
人机无初速度地释放物品。不计空气对物品运动的影响,物品可视为质点且落地后即静止,重力加速度大小g=
10m/s2。下列说法正确的是( )
𝜋
A.𝜔 = 𝑟𝑎𝑑/𝑠
𝑚𝑎𝑥 3
2
B.𝜔 = 𝑟𝑎𝑑/𝑠
𝑚𝑎𝑥 3
C.无人机运动到B点时,在A点释放的物品已经落地
D.无人机运动到B点时,在A点释放的物品尚未落地
【解析】AB.物品从无人机上释放后,做平抛运动,竖直方向有:
1
𝐻 = 𝑔𝑡2
2
代入数据解得:
t=2s
要使得物品落点在目标区域内,设最大线速度为v,速度最大时,水平方向满足:
𝑥 =√𝑅2−𝑅2 =𝑣𝑡
1 2
最大角速度为
𝑣
𝜔 =
𝑚𝑎𝑥 𝑅
2代入数据联立解得:
2
𝜔 = 𝑟𝑎𝑑/𝑠
𝑚𝑎𝑥 3
A错误,B正确;
CD.无人机从A到B运动的时间
𝜋 𝜋
3𝜋
𝑡′= 2 = 2s= 𝑠>t=2s
𝜔 2 4
𝑚𝑎𝑥
3
可知无人机运动到B点时,在A点释放的物品已经落地,C正确,D错误。
故选:BC。
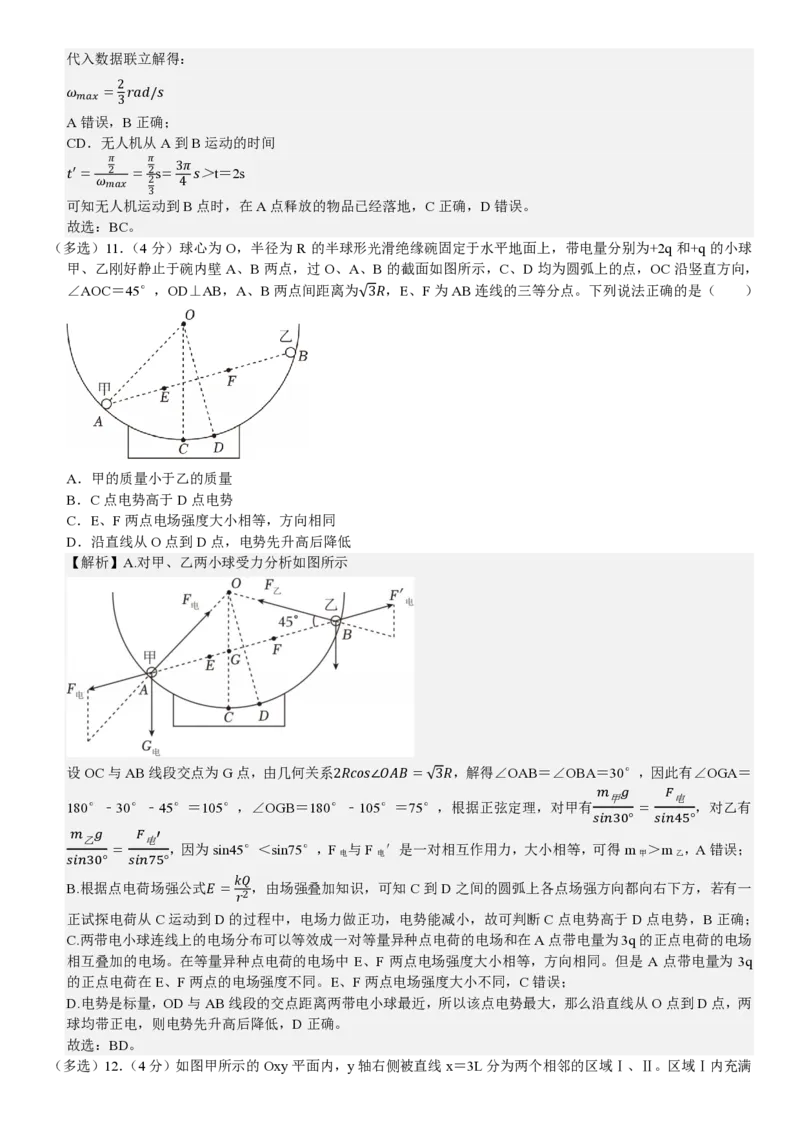
(多选)11.(4 分)球心为 O,半径为 R 的半球形光滑绝缘碗固定于水平地面上,带电量分别为+2q 和+q 的小球
甲、乙刚好静止于碗内壁 A、B 两点,过 O、A、B 的截面如图所示,C、D 均为圆弧上的点,OC 沿竖直方向,
∠AOC=45°,OD⊥AB,A、B两点间距离为√3𝑅,E、F为AB连线的三等分点。下列说法正确的是( )
A.甲的质量小于乙的质量
B.C点电势高于D点电势
C.E、F两点电场强度大小相等,方向相同
D.沿直线从O点到D点,电势先升高后降低
【解析】A.对甲、乙两小球受力分析如图所示
设OC与AB线段交点为G点,由几何关系2𝑅𝑐𝑜𝑠∠𝑂𝐴𝐵 =√3𝑅,解得∠OAB=∠OBA=30°,因此有∠OGA=
𝑚 𝑔 𝐹
甲 电
180°﹣30°﹣45°=105°,∠OGB=180°﹣105°=75°,根据正弦定理,对甲有 = ,对乙有
𝑠𝑖𝑛30° 𝑠𝑖𝑛45°
𝑚 𝑔 𝐹 ′
乙 电
= ,因为sin45°<sin75°,F 与F ′是一对相互作用力,大小相等,可得m >m ,A错误;
电 电 甲 乙
𝑠𝑖𝑛30° 𝑠𝑖𝑛75°
𝑘𝑄
B.根据点电荷场强公式𝐸 = ,由场强叠加知识,可知C到D之间的圆弧上各点场强方向都向右下方,若有一
𝑟2
正试探电荷从C运动到D的过程中,电场力做正功,电势能减小,故可判断C点电势高于D点电势,B正确;
C.两带电小球连线上的电场分布可以等效成一对等量异种点电荷的电场和在A点带电量为3q的正点电荷的电场
相互叠加的电场。在等量异种点电荷的电场中 E、F 两点电场强度大小相等,方向相同。但是 A 点带电量为 3q
的正点电荷在E、F两点的电场强度不同。E、F两点电场强度大小不同,C错误;
D.电势是标量,OD与AB线段的交点距离两带电小球最近,所以该点电势最大,那么沿直线从O点到D点,两
球均带正电,则电势先升高后降低,D正确。
故选:BD。
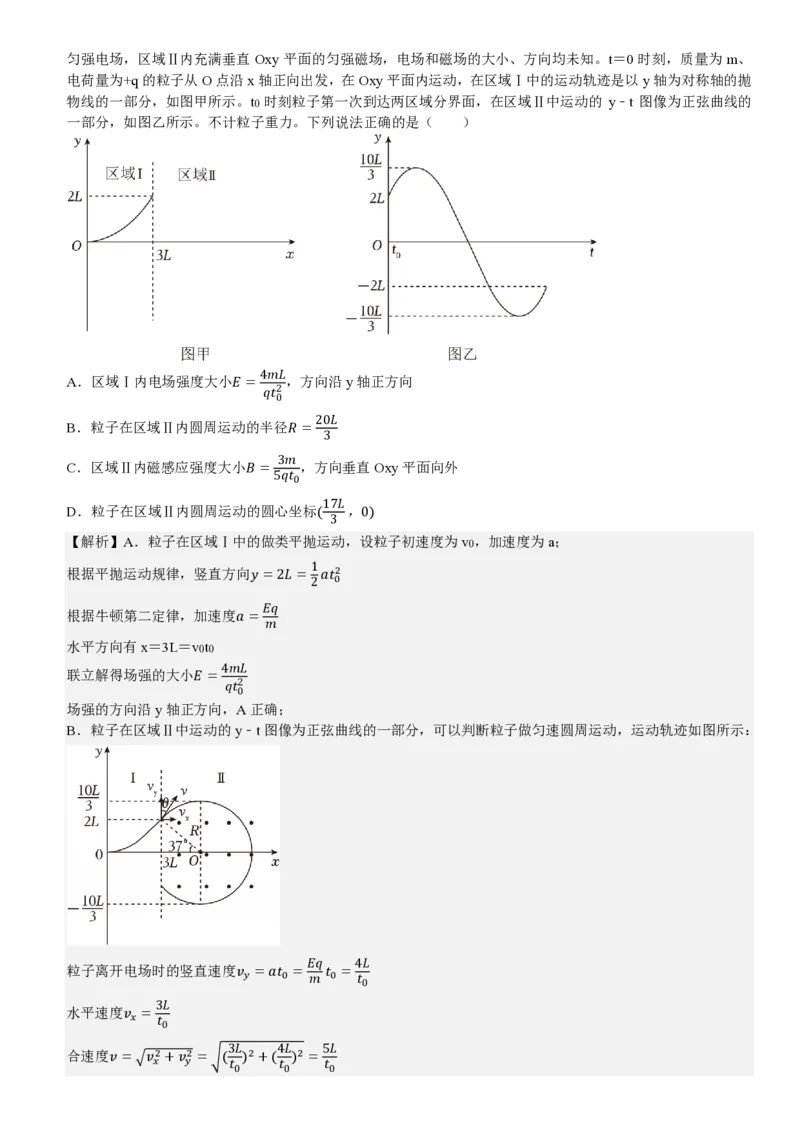
(多选)12.(4分)如图甲所示的Oxy平面内,y轴右侧被直线x=3L分为两个相邻的区域Ⅰ、Ⅱ。区域Ⅰ内充满匀强电场,区域Ⅱ内充满垂直 Oxy 平面的匀强磁场,电场和磁场的大小、方向均未知。t=0 时刻,质量为 m、
电荷量为+q的粒子从O点沿x轴正向出发,在Oxy平面内运动,在区域Ⅰ中的运动轨迹是以y轴为对称轴的抛
物线的一部分,如图甲所示。t0 时刻粒子第一次到达两区域分界面,在区域Ⅱ中运动的 y﹣t 图像为正弦曲线的
一部分,如图乙所示。不计粒子重力。下列说法正确的是( )
4𝑚𝐿
A.区域Ⅰ内电场强度大小𝐸 = ,方向沿y轴正方向
𝑞𝑡2
0
20𝐿
B.粒子在区域Ⅱ内圆周运动的半径𝑅 =
3
3𝑚
C.区域Ⅱ内磁感应强度大小𝐵 = ,方向垂直Oxy平面向外
5𝑞𝑡
0
17𝐿
D.粒子在区域Ⅱ内圆周运动的圆心坐标( ,0)
3
【解析】A.粒子在区域Ⅰ中的做类平抛运动,设粒子初速度为v0 ,加速度为a;
1
根据平抛运动规律,竖直方向𝑦 =2𝐿 = 𝑎𝑡2
2 0
𝐸𝑞
根据牛顿第二定律,加速度𝑎 =
𝑚
水平方向有x=3L=v0t0
4𝑚𝐿
联立解得场强的大小𝐸 =
𝑞𝑡2
0
场强的方向沿y轴正方向,A正确;
B.粒子在区域Ⅱ中运动的y﹣t图像为正弦曲线的一部分,可以判断粒子做匀速圆周运动,运动轨迹如图所示:
𝐸𝑞 4𝐿
粒子离开电场时的竖直速度𝑣 =𝑎𝑡 = 𝑡 =
𝑦 0 𝑚 0 𝑡
0
3𝐿
水平速度𝑣 =
𝑥 𝑡
0
3𝐿 4𝐿 5𝐿
合速度𝑣 =√𝑣2+𝑣2 =√( )2+( )2 =
𝑥 𝑦 𝑡 𝑡 𝑡
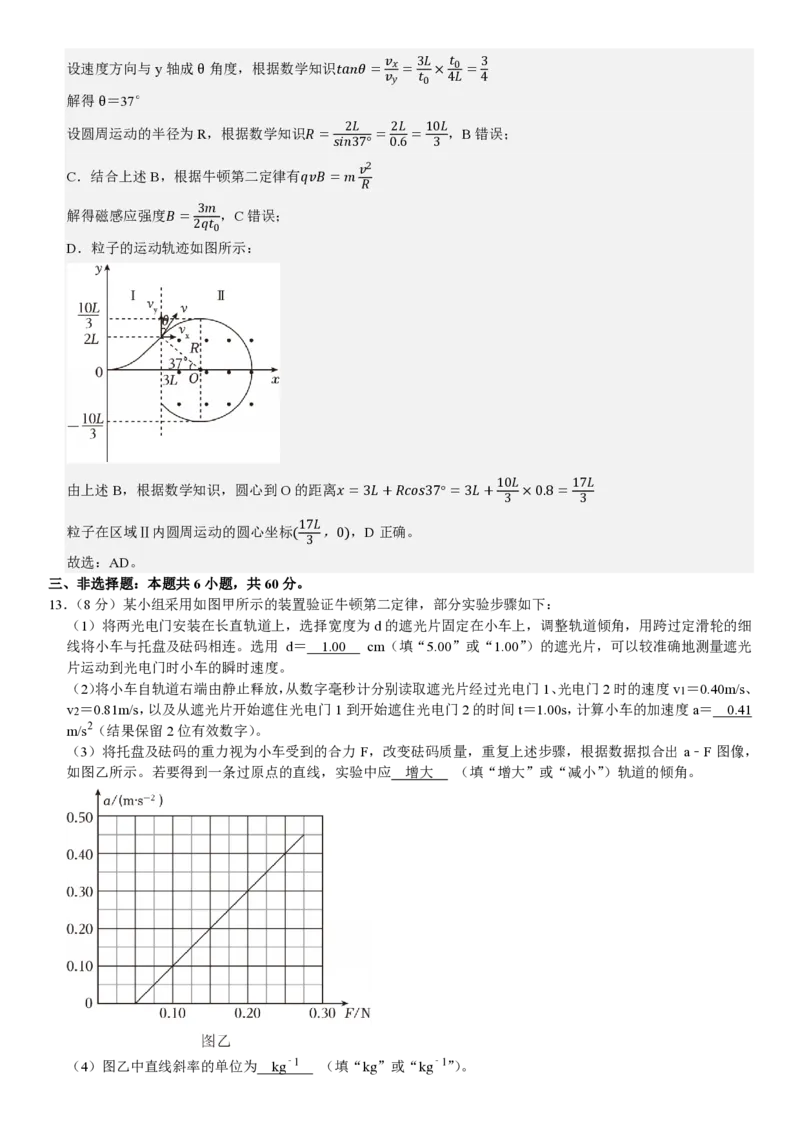
0 0 0𝑣 3𝐿 𝑡 3
设速度方向与y轴成θ 角度,根据数学知识𝑡𝑎𝑛𝜃 = 𝑥 = × 0 =
𝑣 𝑡 4𝐿 4
𝑦 0
解得θ=37°
2𝐿 2𝐿 10𝐿
设圆周运动的半径为R,根据数学知识𝑅 = = = ,B错误;
𝑠𝑖𝑛37° 0.6 3
𝑣2
C.结合上述B,根据牛顿第二定律有𝑞𝑣𝐵 =𝑚
𝑅
3𝑚
解得磁感应强度𝐵 = ,C错误;
2𝑞𝑡
0
D.粒子的运动轨迹如图所示:
10𝐿 17𝐿
由上述B,根据数学知识,圆心到O的距离𝑥 =3𝐿+𝑅𝑐𝑜𝑠37°=3𝐿+ ×0.8=
3 3
17𝐿
粒子在区域Ⅱ内圆周运动的圆心坐标( ,0),D正确。
3
故选:AD。
三、非选择题:本题共6小题,共60分。
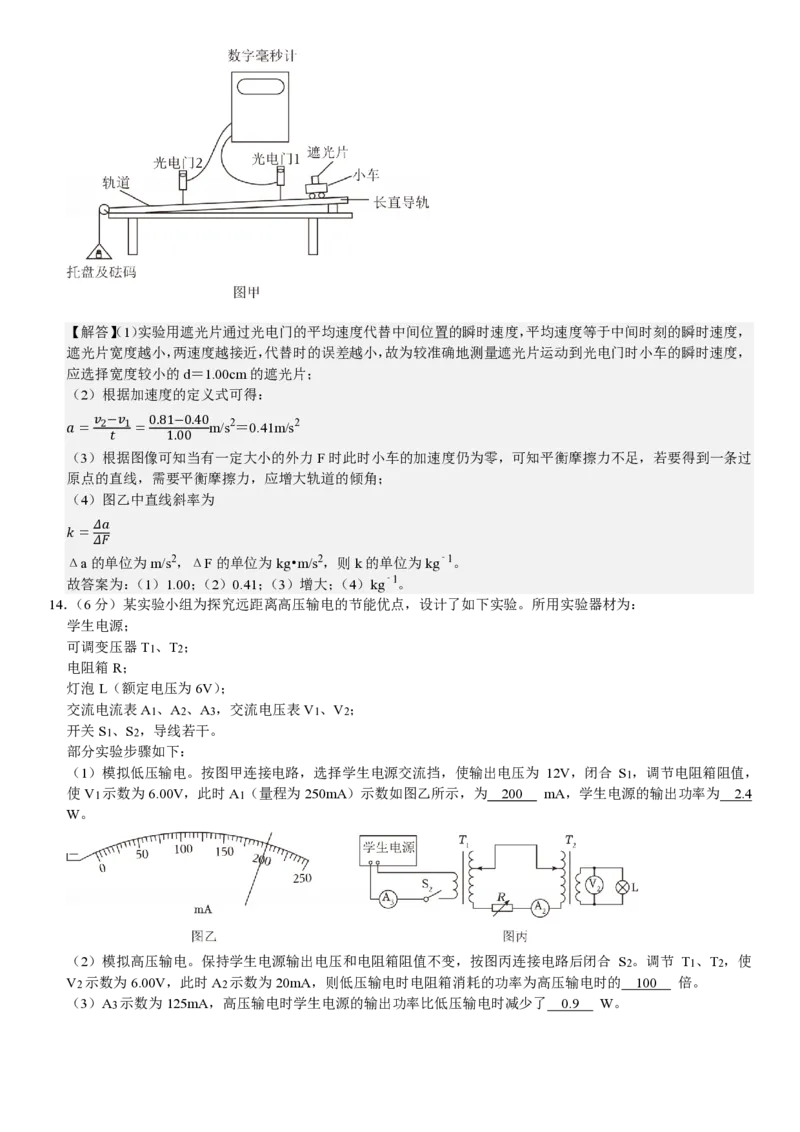
13.(8分)某小组采用如图甲所示的装置验证牛顿第二定律,部分实验步骤如下:
(1)将两光电门安装在长直轨道上,选择宽度为d的遮光片固定在小车上,调整轨道倾角,用跨过定滑轮的细
线将小车与托盘及砝码相连。选用 d= 1.00 cm(填“5.00”或“1.00”)的遮光片,可以较准确地测量遮光
片运动到光电门时小车的瞬时速度。
(2)将小车自轨道右端由静止释放,从数字毫秒计分别读取遮光片经过光电门1、光电门2时的速度v1 =0.40m/s、
v2 =0.81m/s,以及从遮光片开始遮住光电门1到开始遮住光电门2的时间t=1.00s,计算小车的加速度a= 0.41
m/s2(结果保留2位有效数字)。
(3)将托盘及砝码的重力视为小车受到的合力 F,改变砝码质量,重复上述步骤,根据数据拟合出 a﹣F 图像,
如图乙所示。若要得到一条过原点的直线,实验中应 增大 (填“增大”或“减小”)轨道的倾角。
(4)图乙中直线斜率的单位为 kg﹣1 (填“kg”或“kg﹣1”)。【解答】(1)实验用遮光片通过光电门的平均速度代替中间位置的瞬时速度,平均速度等于中间时刻的瞬时速度,
遮光片宽度越小,两速度越接近,代替时的误差越小,故为较准确地测量遮光片运动到光电门时小车的瞬时速度,
应选择宽度较小的d=1.00cm的遮光片;
(2)根据加速度的定义式可得:
𝑣 −𝑣 0.81−0.40
𝑎 = 2 1 = m/s2=0.41m/s2
𝑡 1.00
(3)根据图像可知当有一定大小的外力F时此时小车的加速度仍为零,可知平衡摩擦力不足,若要得到一条过
原点的直线,需要平衡摩擦力,应增大轨道的倾角;
(4)图乙中直线斜率为
𝛥𝑎
𝑘 =
𝛥𝐹
Δa的单位为m/s2,ΔF的单位为kg•m/s2,则k的单位为kg﹣1。
故答案为:(1)1.00;(2)0.41;(3)增大;(4)kg﹣1。
14.(6分)某实验小组为探究远距离高压输电的节能优点,设计了如下实验。所用实验器材为:
学生电源;
可调变压器T1 、T2 ;
电阻箱R;
灯泡L(额定电压为6V);
交流电流表A1 、A2 、A3 ,交流电压表V1 、V2 ;
开关S1 、S2 ,导线若干。
部分实验步骤如下:
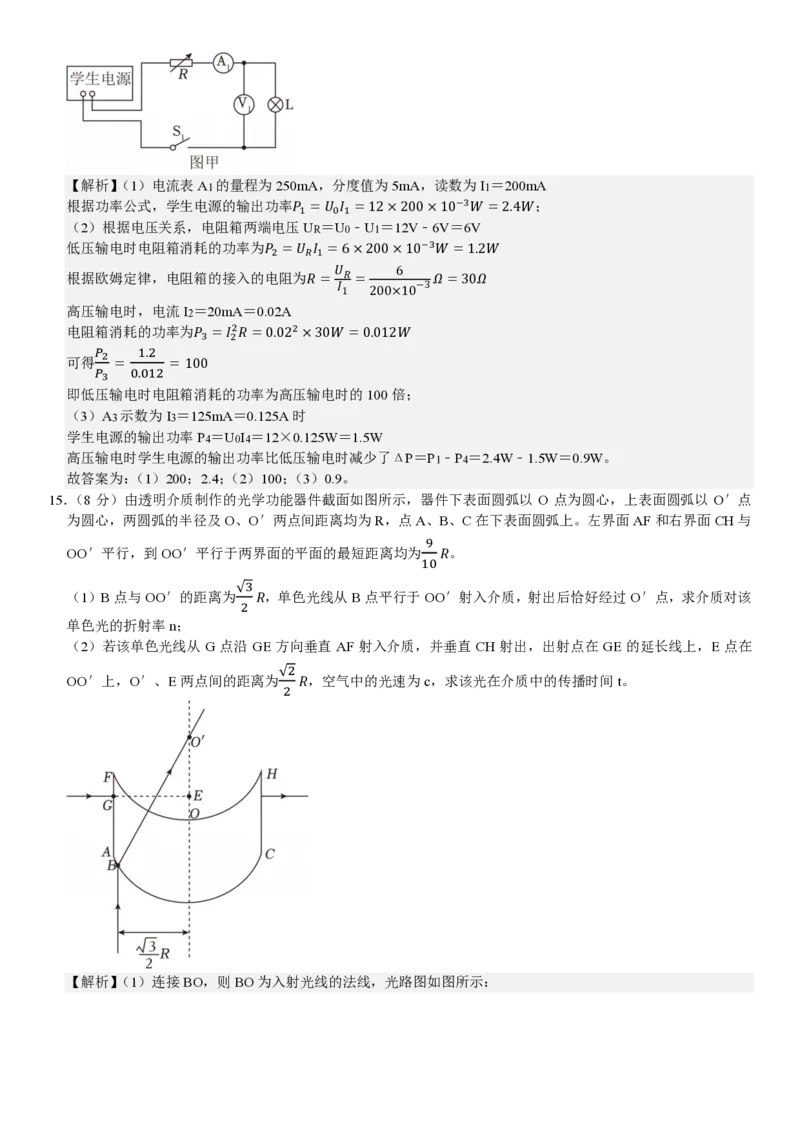
(1)模拟低压输电。按图甲连接电路,选择学生电源交流挡,使输出电压为 12V,闭合 S1 ,调节电阻箱阻值,
使V1 示数为6.00V,此时A1 (量程为250mA)示数如图乙所示,为 200 mA,学生电源的输出功率为 2.4
W。
(2)模拟高压输电。保持学生电源输出电压和电阻箱阻值不变,按图丙连接电路后闭合 S2 。调节 T1 、T2 ,使
V2 示数为6.00V,此时A2 示数为20mA,则低压输电时电阻箱消耗的功率为高压输电时的 100 倍。
(3)A3 示数为125mA,高压输电时学生电源的输出功率比低压输电时减少了 0.9 W。【解析】(1)电流表A1 的量程为250mA,分度值为5mA,读数为I1 =200mA
根据功率公式,学生电源的输出功率𝑃 =𝑈 𝐼 =12×200×10−3𝑊 =2.4𝑊;
1 0 1
(2)根据电压关系,电阻箱两端电压UR =U0 ﹣U1 =12V﹣6V=6V
低压输电时电阻箱消耗的功率为𝑃 =𝑈 𝐼 =6×200×10−3𝑊 =1.2𝑊
2 𝑅 1
𝑈 6
根据欧姆定律,电阻箱的接入的电阻为𝑅 = 𝑅 = 𝛺 =30𝛺
𝐼 −3
1 200×10
高压输电时,电流I2 =20mA=0.02A
电阻箱消耗的功率为𝑃 =𝐼2𝑅 =0.022×30𝑊 =0.012𝑊
3 2
𝑃 1.2
2
可得 = = 100
𝑃 0.012
3
即低压输电时电阻箱消耗的功率为高压输电时的100倍;
(3)A3 示数为I3 =125mA=0.125A时
学生电源的输出功率P4 =U0I4 =12×0.125W=1.5W
高压输电时学生电源的输出功率比低压输电时减少了ΔP=P1 ﹣P4 =2.4W﹣1.5W=0.9W。
故答案为:(1)200;2.4;(2)100;(3)0.9。
15.(8 分)由透明介质制作的光学功能器件截面如图所示,器件下表面圆弧以 O 点为圆心,上表面圆弧以 O′点
为圆心,两圆弧的半径及O、O′两点间距离均为R,点A、B、C在下表面圆弧上。左界面AF和右界面CH与
9
OO′平行,到OO′平行于两界面的平面的最短距离均为 𝑅。
10
√3
(1)B点与OO′的距离为 𝑅,单色光线从B点平行于OO′射入介质,射出后恰好经过O′点,求介质对该
2
单色光的折射率n;
(2)若该单色光线从 G 点沿 GE 方向垂直 AF 射入介质,并垂直 CH 射出,出射点在 GE 的延长线上,E 点在
√2
OO′上,O′、E两点间的距离为 𝑅,空气中的光速为c,求该光在介质中的传播时间t。
2
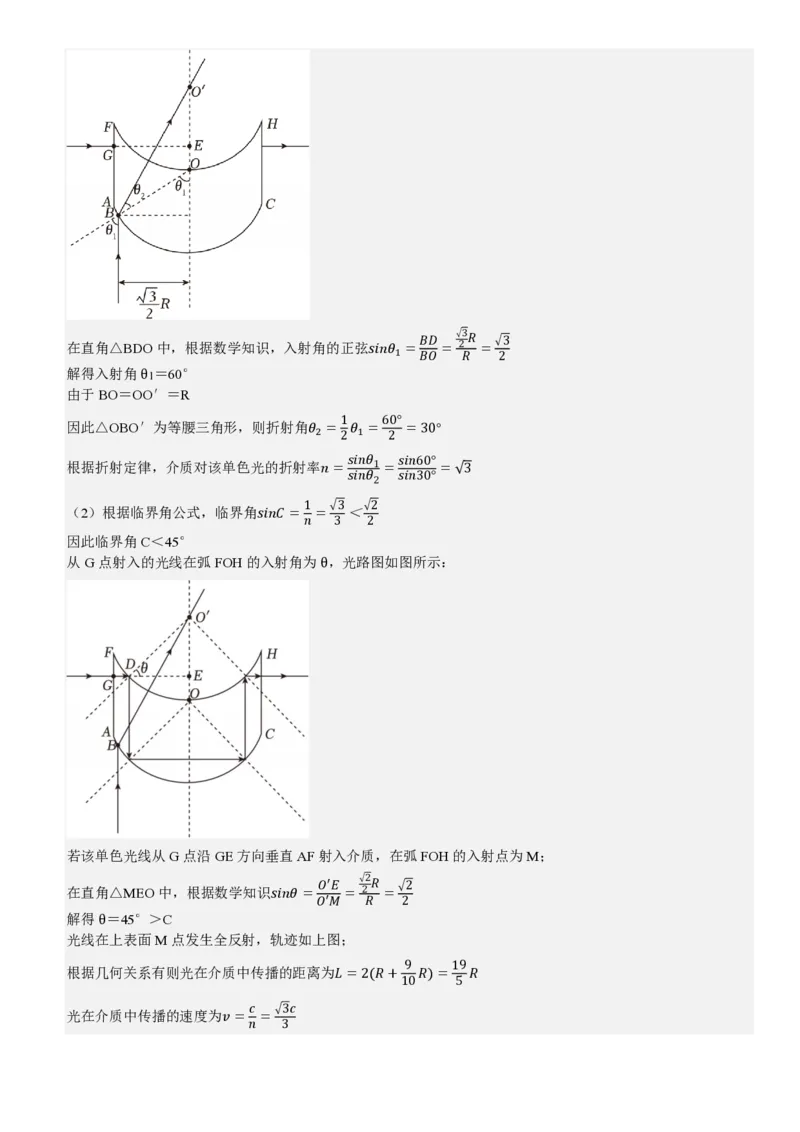
【解析】(1)连接BO,则BO为入射光线的法线,光路图如图所示:𝐵𝐷
√3𝑅
√3
在直角△BDO中,根据数学知识,入射角的正弦𝑠𝑖𝑛𝜃 = = 2 =
1 𝐵𝑂 𝑅 2
解得入射角θ1 =60°
由于BO=OO′=R
1 60°
因此△OBO′为等腰三角形,则折射角𝜃 = 𝜃 = =30°
2 2 1 2
𝑠𝑖𝑛𝜃 𝑠𝑖𝑛60°
根据折射定律,介质对该单色光的折射率𝑛 = 1 = =√3
𝑠𝑖𝑛𝜃 𝑠𝑖𝑛30°
2
1 √3 √2
(2)根据临界角公式,临界角𝑠𝑖𝑛𝐶 = = <
𝑛 3 2
因此临界角C<45°
从G点射入的光线在弧FOH的入射角为θ,光路图如图所示:
若该单色光线从G点沿GE方向垂直AF射入介质,在弧FOH的入射点为M;
𝑂′𝐸
√2𝑅
√2
在直角△MEO中,根据数学知识𝑠𝑖𝑛𝜃 = = 2 =
𝑂′𝑀 𝑅 2
解得θ=45°>C
光线在上表面M点发生全反射,轨迹如上图;
9 19
根据几何关系有则光在介质中传播的距离为𝐿 =2(𝑅+ 𝑅)= 𝑅
10 5
𝑐 √3𝑐
光在介质中传播的速度为𝑣 = =
𝑛 3所以光在介质中的传播时间𝑡 =
𝐿
=
1
5
9𝑅
=
19√3𝑅
。
𝑣 √3𝑐 5𝑐
3
(1)介质对该单色光的折射率为√3;
19√3𝑅
(2)光在介质中的传播时间为 。
5𝑐
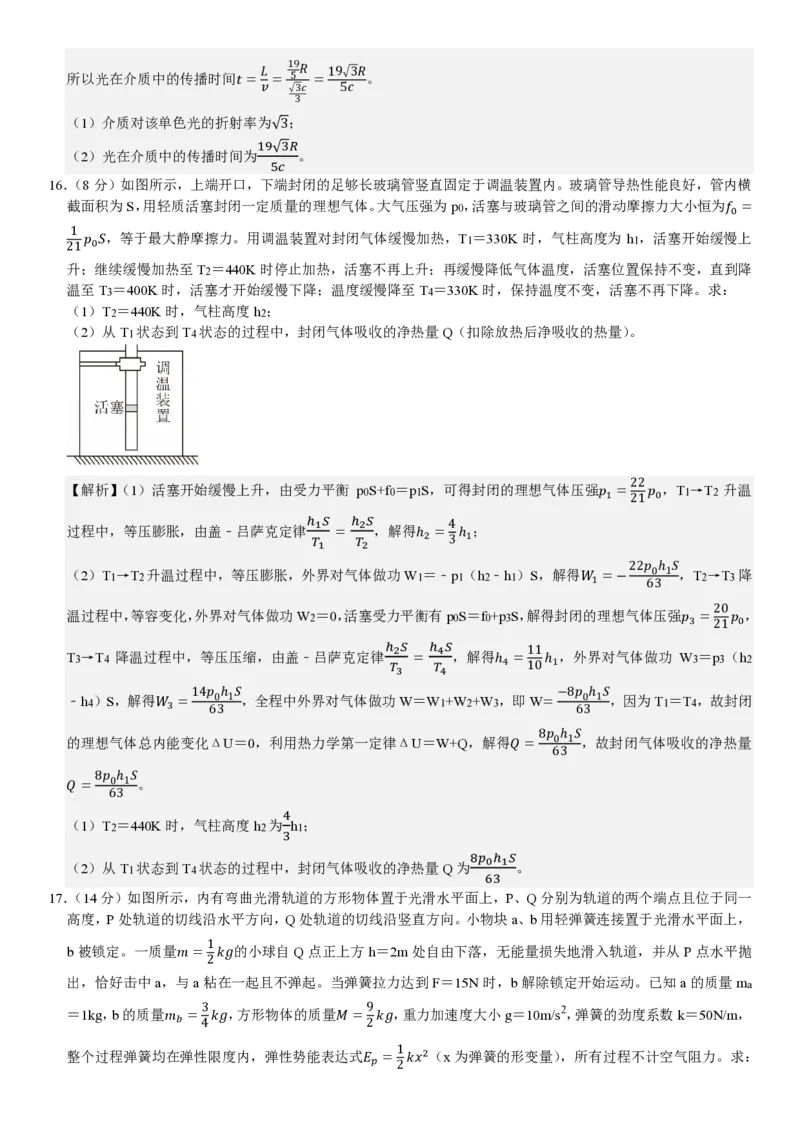
16.(8分)如图所示,上端开口,下端封闭的足够长玻璃管竖直固定于调温装置内。玻璃管导热性能良好,管内横
截面积为S,用轻质活塞封闭一定质量的理想气体。大气压强为p0 ,活塞与玻璃管之间的滑动摩擦力大小恒为𝑓
0
=
1
21
𝑝
0
𝑆,等于最大静摩擦力。用调温装置对封闭气体缓慢加热,T1 =330K 时,气柱高度为 h1 ,活塞开始缓慢上
升;继续缓慢加热至T2 =440K时停止加热,活塞不再上升;再缓慢降低气体温度,活塞位置保持不变,直到降
温至T3 =400K时,活塞才开始缓慢下降;温度缓慢降至T4 =330K时,保持温度不变,活塞不再下降。求:
(1)T2 =440K时,气柱高度h2 ;
(2)从T1 状态到T4 状态的过程中,封闭气体吸收的净热量Q(扣除放热后净吸收的热量)。
22
【解析】(1)活塞开始缓慢上升,由受力平衡 p0S+f0 =p1S,可得封闭的理想气体压强𝑝
1
=
21
𝑝
0
,T1 →T2 升温
ℎ 1 𝑆 ℎ 2 𝑆 4
过程中,等压膨胀,由盖﹣吕萨克定律 = ,解得ℎ = ℎ ;
𝑇 𝑇 2 3 1
1 2
22𝑝 ℎ 𝑆
(2)T1 →T2 升温过程中,等压膨胀,外界对气体做功W1 =﹣p1 (h2 ﹣h1 )S,解得𝑊
1
=−
6
0
3
1 ,T2 →T3 降
20
温过程中,等容变化,外界对气体做功W2 =0,活塞受力平衡有p0S=f0+p3S,解得封闭的理想气体压强𝑝
3
=
21
𝑝
0
,
ℎ 2 𝑆 ℎ 4 𝑆 11
T3 →T4 降温过程中,等压压缩,由盖﹣吕萨克定律
𝑇
=
𝑇
,解得ℎ
4
=
10
ℎ
1
,外界对气体做功 W3 =p3 (h2
3 4
14𝑝 ℎ 𝑆 −8𝑝 ℎ 𝑆
﹣h4 )S,解得𝑊
3
=
6
0
3
1 ,全程中外界对气体做功W=W1+W2+W3 ,即W=
6
0
3
1 ,因为T1 =T4 ,故封闭
8𝑝 ℎ 𝑆
的理想气体总内能变化ΔU=0,利用热力学第一定律ΔU=W+Q,解得𝑄 = 0 1 ,故封闭气体吸收的净热量
63
8𝑝 ℎ 𝑆
𝑄 = 0 1 。
63
4
(1)T2 =440K时,气柱高度h2 为 h1 ;
3
8𝑝 ℎ 𝑆
0 1
(2)从T1 状态到T4 状态的过程中,封闭气体吸收的净热量Q为 。
63
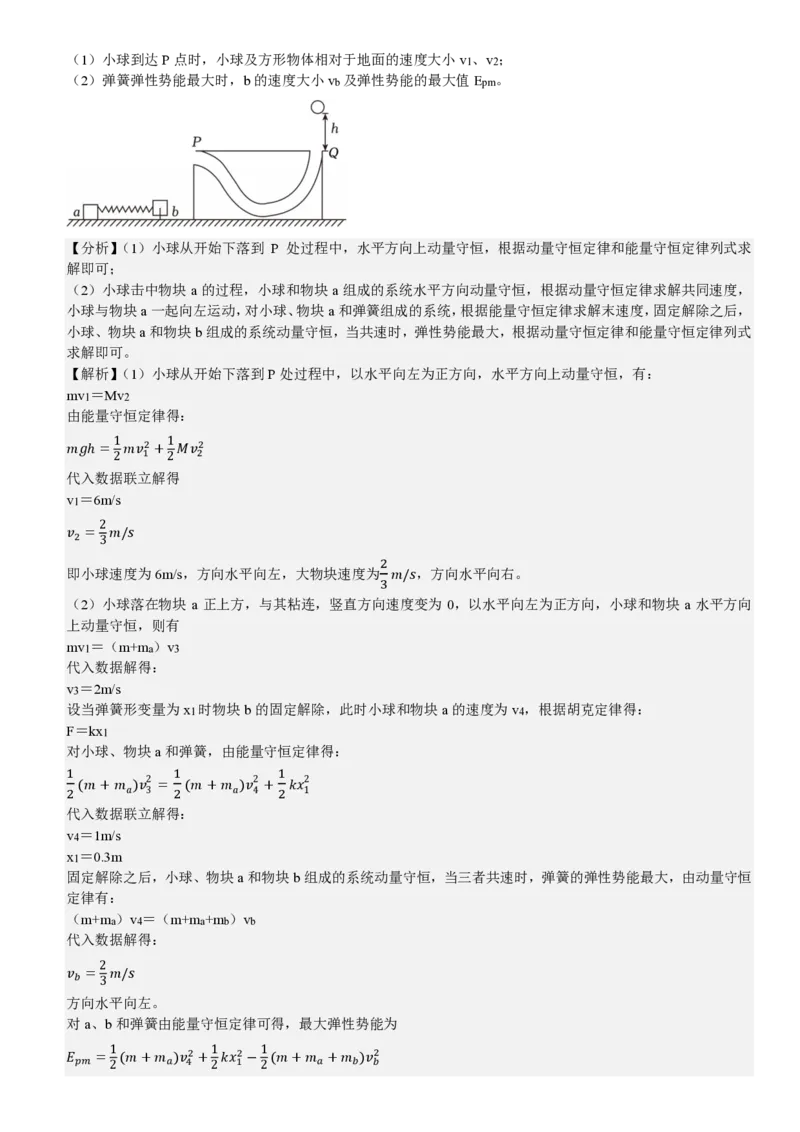
17.(14分)如图所示,内有弯曲光滑轨道的方形物体置于光滑水平面上,P、Q分别为轨道的两个端点且位于同一
高度,P处轨道的切线沿水平方向,Q处轨道的切线沿竖直方向。小物块a、b用轻弹簧连接置于光滑水平面上,
1
b被锁定。一质量𝑚 = 𝑘𝑔的小球自Q点正上方h=2m处自由下落,无能量损失地滑入轨道,并从P点水平抛
2
出,恰好击中a,与a粘在一起且不弹起。当弹簧拉力达到F=15N时,b解除锁定开始运动。已知a的质量ma
3 9
=1kg,b的质量𝑚 = 𝑘𝑔,方形物体的质量𝑀 = 𝑘𝑔,重力加速度大小g=10m/s2,弹簧的劲度系数k=50N/m,
𝑏 4 2
1
整个过程弹簧均在弹性限度内,弹性势能表达式𝐸 = 𝑘𝑥2(x为弹簧的形变量),所有过程不计空气阻力。求:
𝑝 2(1)小球到达P点时,小球及方形物体相对于地面的速度大小v1 、v2 ;
(2)弹簧弹性势能最大时,b的速度大小vb 及弹性势能的最大值Epm 。
【分析】(1)小球从开始下落到 P 处过程中,水平方向上动量守恒,根据动量守恒定律和能量守恒定律列式求
解即可;
(2)小球击中物块 a 的过程,小球和物块 a 组成的系统水平方向动量守恒,根据动量守恒定律求解共同速度,
小球与物块a一起向左运动,对小球、物块a和弹簧组成的系统,根据能量守恒定律求解末速度,固定解除之后,
小球、物块a和物块b组成的系统动量守恒,当共速时,弹性势能最大,根据动量守恒定律和能量守恒定律列式
求解即可。
【解析】(1)小球从开始下落到P处过程中,以水平向左为正方向,水平方向上动量守恒,有:
mv1 =Mv2
由能量守恒定律得:
1 1
𝑚𝑔ℎ = 𝑚𝑣2+ 𝑀𝑣2
2 1 2 2
代入数据联立解得
v1 =6m/s
2
𝑣 = 𝑚/𝑠
2 3
2
即小球速度为6m/s,方向水平向左,大物块速度为 𝑚/𝑠,方向水平向右。
3
(2)小球落在物块 a 正上方,与其粘连,竖直方向速度变为 0,以水平向左为正方向,小球和物块 a 水平方向
上动量守恒,则有
mv1 =(m+ma )v3
代入数据解得:
v3 =2m/s
设当弹簧形变量为x1 时物块b的固定解除,此时小球和物块a的速度为v4 ,根据胡克定律得:
F=kx1
对小球、物块a和弹簧,由能量守恒定律得:
1 1 1
(𝑚 + 𝑚 )𝑣2 = (𝑚 + 𝑚 )𝑣2 + 𝑘𝑥2
2 𝑎 3 2 𝑎 4 2 1
代入数据联立解得:
v4 =1m/s
x1 =0.3m
固定解除之后,小球、物块a和物块b组成的系统动量守恒,当三者共速时,弹簧的弹性势能最大,由动量守恒
定律有:
(m+ma )v4 =(m+ma+mb )vb
代入数据解得:
2
𝑣 = 𝑚/𝑠
𝑏 3
方向水平向左。
对a、b和弹簧由能量守恒定律可得,最大弹性势能为
1 1 1
𝐸 = (𝑚+𝑚 )𝑣2+ 𝑘𝑥2− (𝑚+𝑚 +𝑚 )𝑣2
𝑝𝑚 2 𝑎 4 2 1 2 𝑎 𝑏 𝑏代入数据解得:
5
𝐸 = 𝐽
𝑝𝑚 2
2
(1)小球到达P点时,小球相对于地面的速度大小v1 为6m/s,方形物体相对于地面的速度大小v2 为 𝑚/𝑠;
3
2 5
(2)弹簧弹性势能最大时,b的速度大小vb 为 m/s,弹性势能的最大值Epm 为 J。
3 2
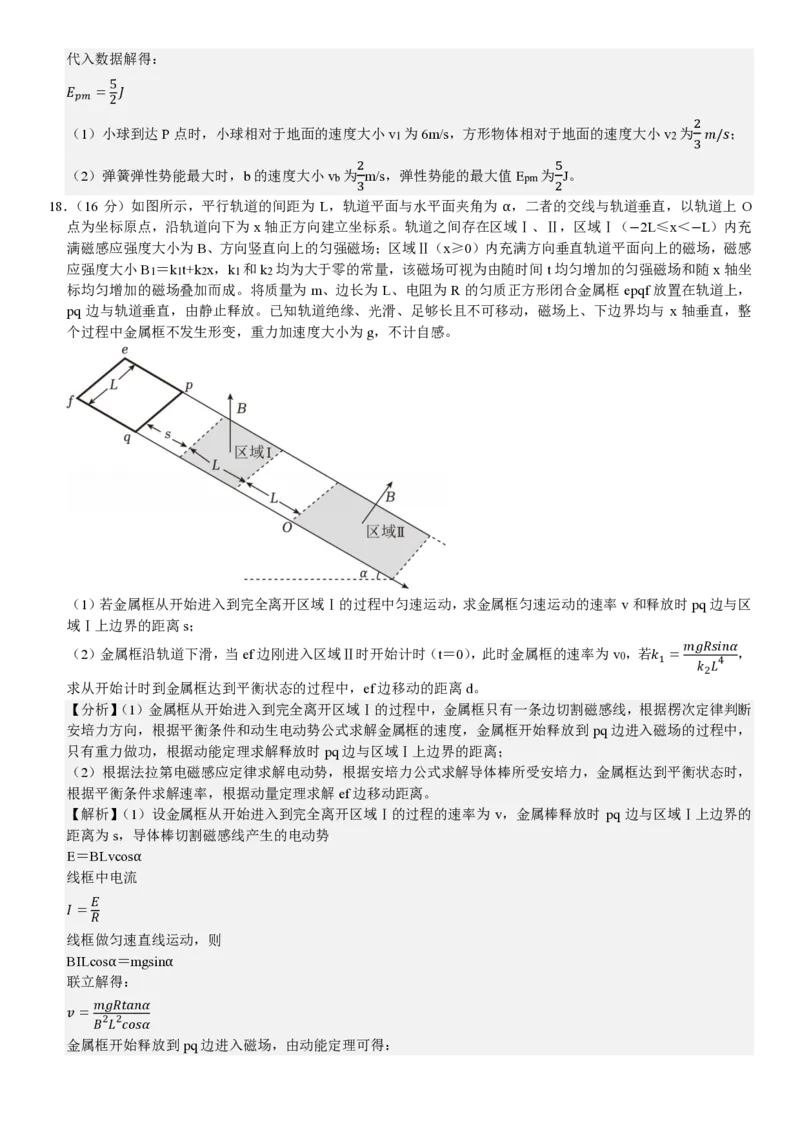
18.(16 分)如图所示,平行轨道的间距为 L,轨道平面与水平面夹角为 α,二者的交线与轨道垂直,以轨道上 O
点为坐标原点,沿轨道向下为x轴正方向建立坐标系。轨道之间存在区域Ⅰ、Ⅱ,区域Ⅰ(−2L≤x<−L)内充
满磁感应强度大小为B、方向竖直向上的匀强磁场;区域Ⅱ(x≥0)内充满方向垂直轨道平面向上的磁场,磁感
应强度大小B1 =k1t+k2x,k1 和k2 均为大于零的常量,该磁场可视为由随时间t均匀增加的匀强磁场和随x轴坐
标均匀增加的磁场叠加而成。将质量为 m、边长为 L、电阻为R 的匀质正方形闭合金属框 epqf放置在轨道上,
pq 边与轨道垂直,由静止释放。已知轨道绝缘、光滑、足够长且不可移动,磁场上、下边界均与 x 轴垂直,整
个过程中金属框不发生形变,重力加速度大小为g,不计自感。
(1)若金属框从开始进入到完全离开区域Ⅰ的过程中匀速运动,求金属框匀速运动的速率v和释放时pq边与区
域Ⅰ上边界的距离s;
𝑚𝑔𝑅𝑠𝑖𝑛𝛼
(2)金属框沿轨道下滑,当ef边刚进入区域Ⅱ时开始计时(t=0),此时金属框的速率为v0 ,若𝑘
1
=
4
,
𝑘 𝐿
2
求从开始计时到金属框达到平衡状态的过程中,ef边移动的距离d。
【分析】(1)金属框从开始进入到完全离开区域Ⅰ的过程中,金属框只有一条边切割磁感线,根据楞次定律判断
安培力方向,根据平衡条件和动生电动势公式求解金属框的速度,金属框开始释放到pq边进入磁场的过程中,
只有重力做功,根据动能定理求解释放时pq边与区域Ⅰ上边界的距离;
(2)根据法拉第电磁感应定律求解电动势,根据安培力公式求解导体棒所受安培力,金属框达到平衡状态时,
根据平衡条件求解速率,根据动量定理求解ef边移动距离。
【解析】(1)设金属框从开始进入到完全离开区域Ⅰ的过程的速率为 v,金属棒释放时 pq 边与区域Ⅰ上边界的
距离为s,导体棒切割磁感线产生的电动势
E=BLvcosα
线框中电流
𝐸
𝐼 =
𝑅
线框做匀速直线运动,则
BILcosα=mgsinα
联立解得:
𝑚𝑔𝑅𝑡𝑎𝑛𝛼
𝑣 =
2 2
𝐵 𝐿 𝑐𝑜𝑠𝛼
金属框开始释放到pq边进入磁场,由动能定理可得:1
𝑚𝑔𝑠𝑠𝑖𝑛𝛼 = 𝑚𝑣2
2
解得:
𝑣2 𝑚2𝑔𝑅 2 𝑠𝑖𝑛𝛼
𝑠 = =
2𝑔𝑠𝑖𝑛𝛼 2𝐵 4 𝐿 4 𝑐𝑜𝑠4𝛼
(2)当ef边刚进入区域Ⅱ时开始计时(t = 0),设线框ef边到O点的距离为s时,线框中产生的感应电动势
𝛥𝛷 𝛥𝐵 𝛥𝑠
𝐸′= = 𝐿2 =𝑘 𝐿2+𝑘 𝐿2 =(𝑘 +𝑘 𝑣)𝐿2
𝛥𝑡 𝛥𝑡 1 2 𝛥𝑡 1 2
其中
𝛥𝑠
𝑣 =
𝛥𝑡
此时线路中的感应电流
𝐸′
𝐼′=
𝑅
线框pq边受到沿轨道向上的安培力,大小为
F 安1 =[k1t+k2 (s+L)]I'L
线框ef边受到沿轨道向下的安培力,大小为
F 安2 =(k1t+k2s)I'L
则线框受到的安培力
F 安 =F 安1 ﹣F 安2 =[k1t+k2 (s+L)]I'L﹣(k1t+k2s)I'L
解得:
2 4
𝑘 𝐿 𝑣
𝐹 =𝑚𝑔𝑠𝑖𝑛𝛼+ 2
安 𝑅
当线框平衡时
F =mgsinα
安
联立解得:
v=0
则从开始计时到金属框达到平衡状态的过程中,取沿斜面向下为正方向,根据动量定理可得:
mgsinαΔt﹣F Δt=mΔv
安
2 4
𝑘 𝐿 𝑣
− 2 𝛥𝑡 =𝑚𝛥𝑣
𝑅
2 4
𝑘 𝐿 𝑑
− 2 =0−𝑚𝑣
𝑅 0
解得:
𝑚𝑅𝑣
𝑑 = 0
2 4
𝑘 𝐿
2
𝑚𝑔𝑅𝑡𝑎𝑛𝛼 𝑚2𝑔𝑅2𝑠𝑖𝑛𝛼
(1)金属框匀速运动的速率v为 ,释放时pq边与区域Ⅰ上边界的距离s为 ;
𝐵2𝐿2𝑐𝑜𝑠𝛼 2𝐵4𝐿4𝑐𝑜𝑠4𝛼
𝑚𝑅𝑣
0
(2)从开始计时到金属框达到平衡状态的过程中,ef边移动的距离d为 。
𝑘2𝐿4
2
