
文档内容
复习讲义答案精析
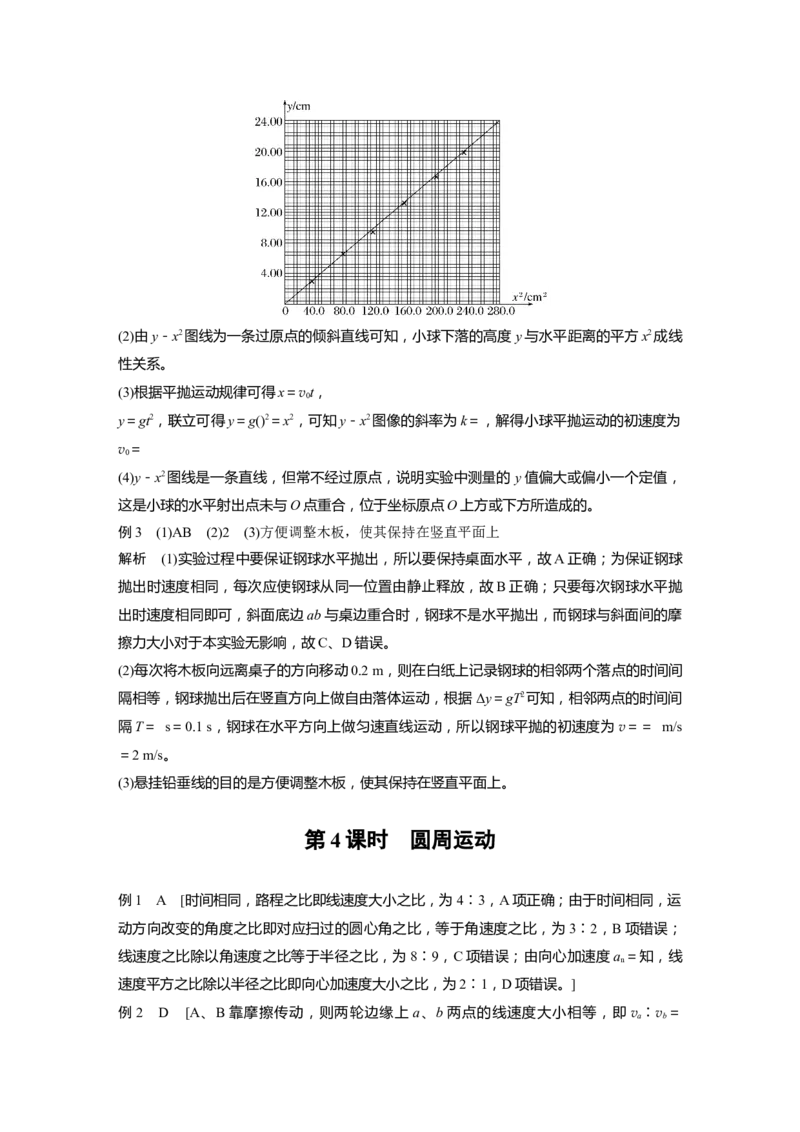
第一章 运动的描述 匀变速直线运动的研究
第 1 课时 运动的描述
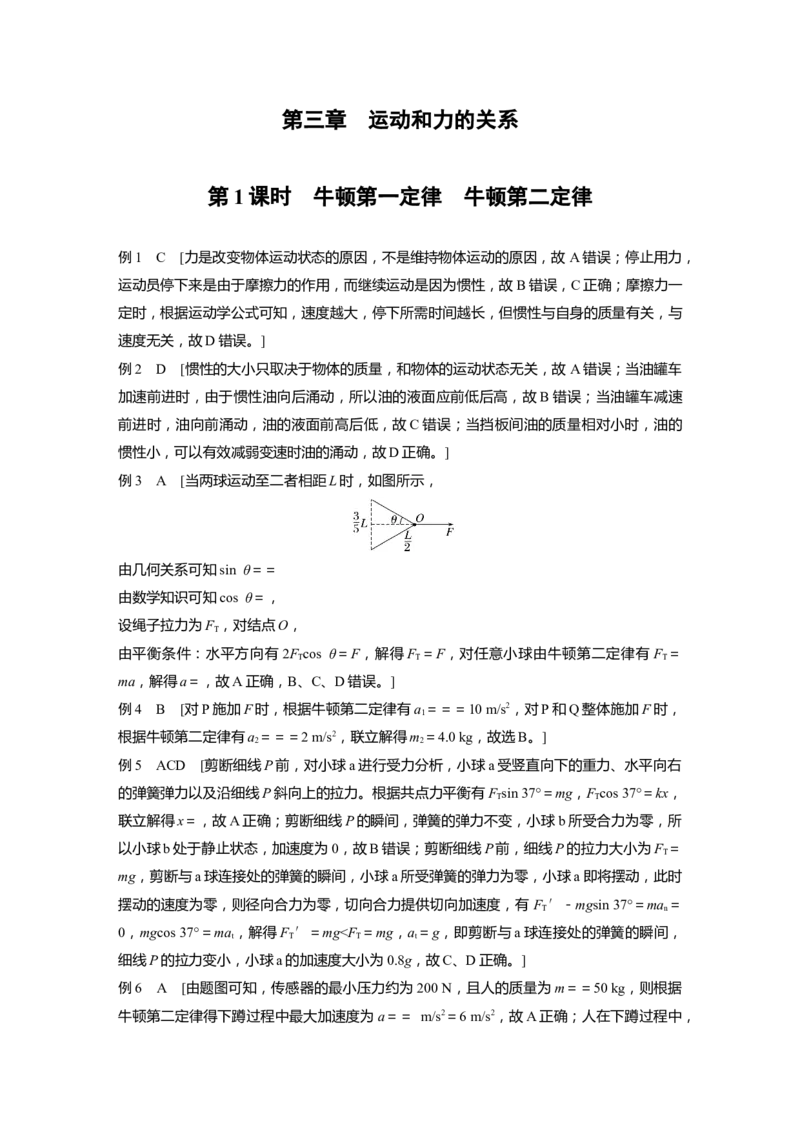
例1 C [当物体的大小、形状对所研究的问题影响很小或者没有影响时,可以将物体看作
质点,而上抛的硬币落回地面猜测正反面时,硬币不能被看作质点,故 A错误;掷铅球的
成绩为4.50 m,指铅球在水平方向的位移为4.50 m,故B错误;800 m是运动员实际运动轨
迹的长度,指路程,故C正确;以编队中的某一飞机为参考系,地面上的观众处于运动状
态,故D错误。]
例2 C [根据位移概念可知,该次作业中小车相对地面的位移大小为 x== m=10 m,故
选C。]
例3 C [根据位移的定义,从 M点漂流到N点的过程中,该游客的位移大小为 x=1.8
km,根据平均速度的定义,平均速度大小v== m/s=0.5 m/s,选项A错误,C正确;平均
速率v′==5.4 km/h,选项B错误;若以所乘竹筏为参考系,玉女峰的平均速度大小为
0.5 m/s,选项D错误。]
例4 B [运动员全程的位移大小x=vt -vt =6×5 m-4×5 m=10 m,全程用时t=5 s+
22 11
5 s+5 s=15 s,故平均速度大小v== m/s= m/s,方向水平向西,运动员全程的路程 s=
vt+vt=6×5 m+4×5 m=50 m,故平均速率v′== m/s= m/s,故选B。]
22 11
例5 C [滑块通过A的速度大小为v == cm/s=100 cm/s,故A错误;
A
滑块通过B的速度大小为v == cm/s=200 cm/s,故B错误;
B
滑块的加速度大小为a== m/s2=5 m/s2,故C正确;
滑块在A、B间的平均速度大小为== m/s=1.5 m/s,故D错误。]
例6 B [设向下为正方向,根据加速度公式可得a== m/s2=-13 m/s2,平均加速度大小
为13 m/s2,负号表示方向与正方向相反,故选B。]
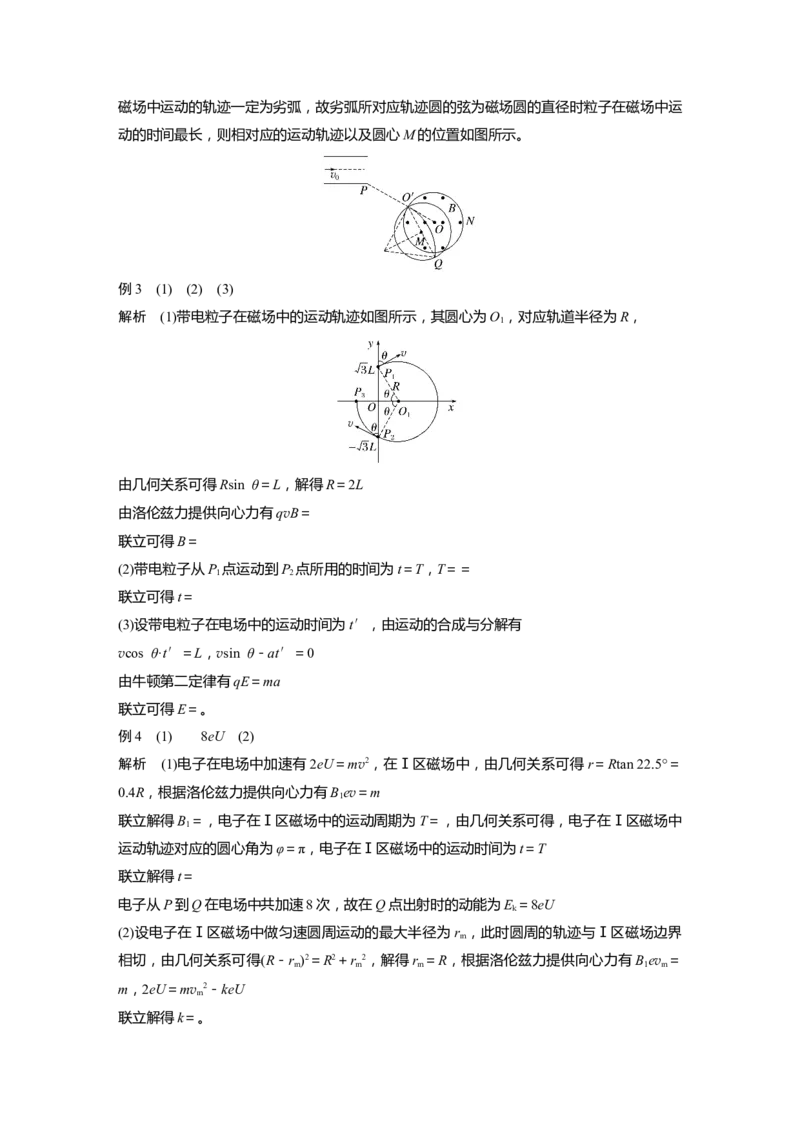
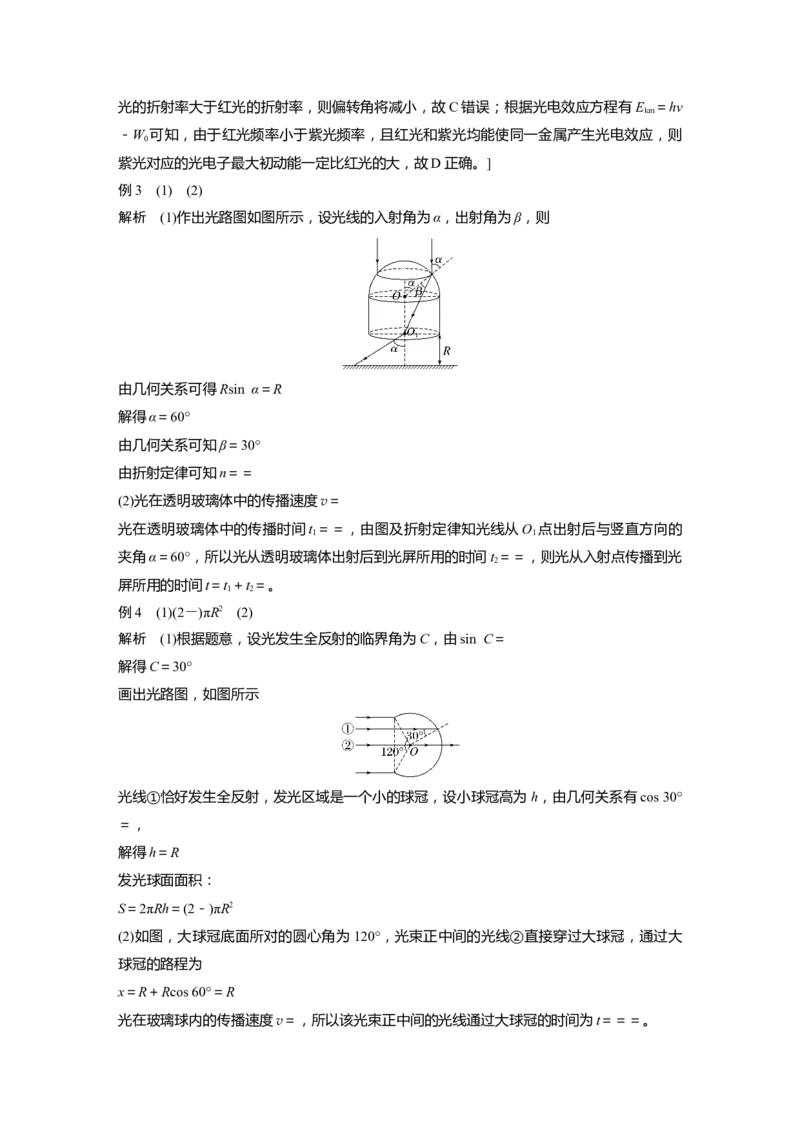
例7 见解析
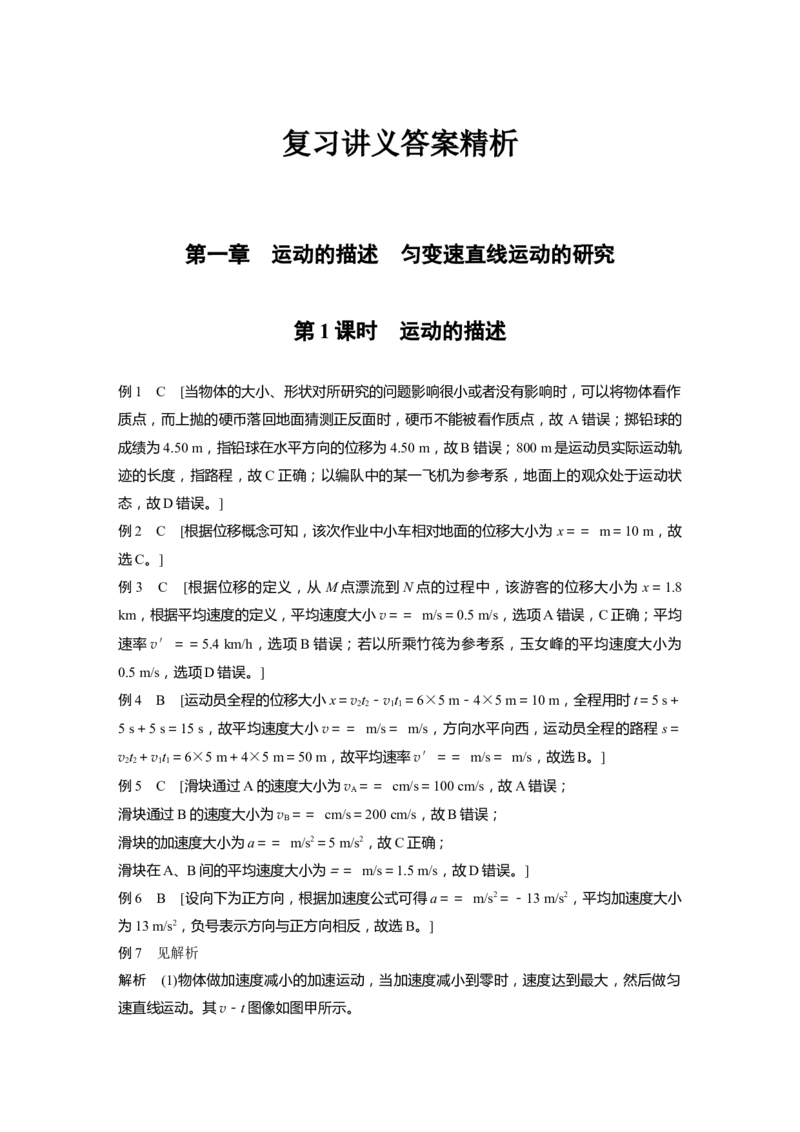
解析 (1)物体做加速度减小的加速运动,当加速度减小到零时,速度达到最大,然后做匀
速直线运动。其v-t图像如图甲所示。(2)具体有以下三种情况
①物体做加速度减小的减速运动,当加速度减小到零时做同方向的匀速直线运动,如图乙所
示;
②物体做加速度减小的减速运动,当加速度减小到零时物体的速度同时减小到零,物体静止,
如图丙所示;
③物体做加速度减小的减速运动,当速度减小到零时,加速度不为零,然后反方向做加速运
动,直到加速度减小到零,然后做匀速直线运动,如图丁所示。
第 2 课时 匀变速直线运动的规律
例1 D [由于此阶段的运动可看作匀减速直线运动,则加速度方向向上,可知航天员处于
超重状态,故A错误;根据速度与位移的关系有 v2-v2=2ax,解得航天员的加速度a=
0
-16 m/s2,即加速度大小为 16 m/s2,故B错误;由速度时间公式有 v=v +at,解得t=
0
0.25 s,故C错误;此阶段返回舱的平均速度大小为==4 m/s,故D正确。]
例2 C [采用逆向思维法,由于最后1 s内的位移为2 m,根据x =at2得,汽车加速度大
2 2
小a==4 m/s2,第1 s内的位移为13 m,根据x =vt -at2,代入数据解得初速度v =15
1 01 1 0
m/s,则汽车在第1 s末的速度大小v =v -at =15 m/s-4×1 m/s=11 m/s,故C正确,A、
1 0 1
B、D错误。]
例3 ABC [以沿斜面向上为正方向,则a=-5 m/s2,当物体的位移为沿斜面向上7.5 m时,
x=7.5 m,由运动学公式x=vt+at2,解得t =3 s或t =1 s,故A、B正确;当物体的位移
0 1 2
为沿斜面向下7.5 m时,x=-7.5 m,由x=vt+at2,解得t =(2+) s或t =(2-) s(舍去),
0 3 4
故C正确;由速度时间公式v=v +at,解得v =-5 m/s、v =5 m/s、v =-5 m/s,故D错
0 1 2 3
误。]
思考 (1)刹车类问题的特点:物体匀减速到速度为零后停止运动。解题时,判断在所求问
题的时间内,物体是否已经停止。
(2)如沿光滑固定斜面上滑的小球,到最高点后仍能以原加速度匀加速下滑,全过程加速度
大小、方向均不变。解题时可分过程列式,也可对全过程列式,但必须注意 x、v、a等矢量
的正负号及物理意义,物体的运动可能出现多解。
例4 A [根据匀变速直线运动规律:某段时间中间时刻的瞬时速度等于该段的平均速度,
则第6 s内的平均速度等于5.5 s时刻的瞬时速度,前5 s内的平均速度等于2.5 s时刻的瞬时
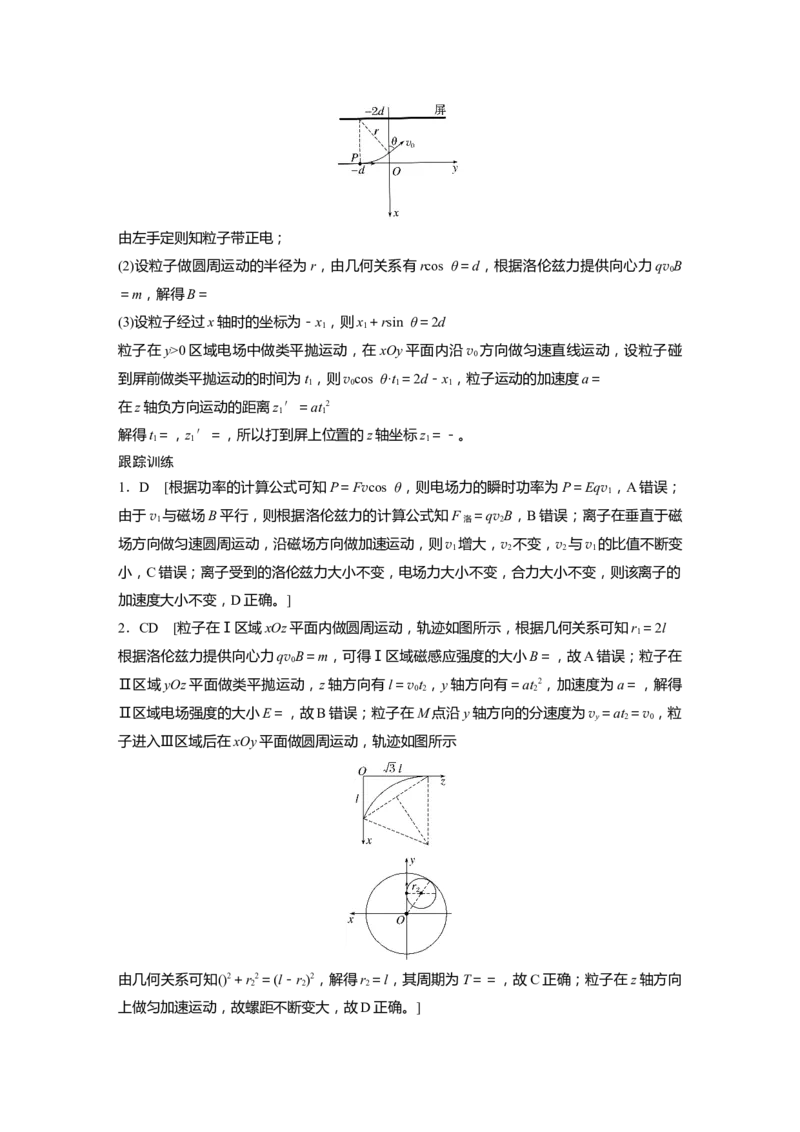
速度,依题意由加速度定义式可得a== m/s2=1 m/s2,故选A。]例5 C [根据位移差公式得x -x =2aT2,可知a== m/s2=4 m/s2,故A正确,不符合题
4 2
意;第2 s内的位移大小为x -x =at2-at2=×4×(22-12) m=6 m,故B正确,不符合题
2 1 2 1
意;第2 s末的速度大小为v=at =4×2 m/s=8 m/s,故C错误,符合题意;物体在0~5 s
2
内的平均速度大小为=== m/s=10 m/s,故D正确,不符合题意。]
例6 BCD [子弹做匀减速直线运动,通过相同位移的时间逐渐增大,所以子弹在每个水
球中运动的时间不同,而加速度相同,由 Δv=at知,子弹在每个水球中的速度变化量不同,
故A错误;子弹的运动可看作反向的初速度为0的匀加速直线运动,对于初速度为零的匀
加速直线运动,通过连续相等位移的时间之比为 1∶(-1):(-)∶(2-),则子弹依次穿过每
个水球所用的时间之比为(2-)∶(-)∶(-1)∶1,故B正确;子弹的运动可看作反向的初速
度为0的匀加速直线运动,根据x=at2可得从静止开始连续通过相等的位移所用时间之比为
1∶∶∶2,根据v=at可知逆向子弹依次进入每个水球时的速度之比为1∶∶∶2,则子弹依
次进入每个水球时的速度之比为2∶∶∶1,故C正确;子弹恰好能穿出第4个水球,则根
据B项分析知子弹穿过第4个水球的时间与子弹穿过前3个水球所用的时间相同,则子弹穿
出第3个水球时的瞬时速度即为中间时刻的速度,与全程的平均速度相等,故D正确。]
第 3 课时 自由落体运动和竖直上抛运动 多过程问题
例1 B [在前1 s内、前2 s内、前3 s内的位移大小之比是1∶4∶9,故A错误;在相邻
两个1 s内的位移之差都是Δx=gT2=10 m,故B正确;在第1 s内、第2 s内、第3 s内的位
移大小之比为1∶3∶5,所以平均速度大小之比为1∶3∶5,故C错误;在1 s末、2 s末、
3 s末的速度大小之比是1∶2∶3,故D错误。]
例2 (1)20 m/s 15 m (2)4.05 m
解析 (1)根据速度位移关系v2=2gh,解得鸡蛋落地时速度大小为v=20 m/s,设鸡蛋自由
下落时间为t,根据速度时间关系得t==2 s,鸡蛋在第1 s内的位移为h=gt2=5 m
1 1
则鸡蛋落地前最后1 s内的位移大小为h=h-h=15 m
2 1
(2)由题意知,窗口的高度为h=2 m
3
设高楼面离窗的上边框的高度为h,鸡蛋从高楼面运动到窗的上边框的时间为t,则h=
0 0 0
gt2,h+h=g(t+Δt)2,联立解得h=4.05 m。
0 0 3 0 0
例3 BC [b球下落高度为20 m时,t == s=2 s,则a球下落了3 s,a球的速度大小为v
1
=30 m/s,故A错误;a球下落的总时间为t= s=5 s,a球落地瞬间b球下落了4 s,b球的
2
下落高度为h′=×10×42 m=80 m,故b球离地面的高度为h″=(125-80) m=45 m,故
B正确;由自由落体运动的规律可得,在a球接触地面之前,两球的速度差Δv=gt-g(t-1
s)=10 m/s,即速度差恒定,两球离地的高度差变大,故C正确,D错误。]例4 (1)2 s (2)45 m (3)4 s (4)5 s
(5)1 s 3 s (2+)s
解析 (1)运动到最高点时速度为0,由v=v-gt 得t=-==2 s
0 1 1
(2)由v2=2gh 得h ==20 m,
0 max max
所以H =h +h=45 m
max max 0
(3)法一:分段,由(1)(2)知上升时间t=2 s,h =20 m,
1 max
下落时,h =gt2,
max 2
解得t=2 s,故t=t+t=4 s
2 1 2
法二:由对称性知返回抛出点时速度为20 m/s,方向向下,则由v=v-gt,得t=-=4 s
1 0
法三:由h=vt-gt2,令h=0,
0
解得t=0(舍去),t=4 s
3 4
(4)法一:分段法
由H =gt2,解得t=3 s,
max 5 5
故t =t+t=5 s
总 1 5
法二:全程法
由-h=vt′-gt′2
0 0
解得t=-1 s(舍去),t=5 s
6 7
(5)当物体在抛出点上方时,h=15 m,
由h=vt-gt2,
0
解得t=1 s,t=3 s,
8 9
当物体在抛出点下方时,h=-15 m,
由h=vt-gt2,得t =(2+) s,t =(2-) s(舍去)。
0 10 11
例5 A [射出的弹丸做竖直上抛运动,可看成自由落体运动的逆运动,由运动学公式h=
gt2,弹丸最后1 s内上升的高度h=×10×12 m=5 m,则最初1 s内上升的高度h=9h=45
1 2 1
m,最初1 s内中间时刻的速度v== m/s=45 m/s,弹丸的初速度v=v+gt′=
0
45 m/s+10×0.5 m/s=50 m/s,故上升的最大高度为h== m=125 m,故选A。]
例6 (1)9 s (2)4 m/s2
解析 (1)设无人机下降过程最大速度为v,向下加速时间为t ,减速时间为t ,则由匀变速
1 2
直线运动规律有h=at2,v=at,H-H-h=t,联立解得t=t+t=9 s
1 11 11 1 2 1 2 1 2
(2)无人机自由下落2 s末的速度为v=gt′=20 m/s,2 s内向下运动的位移为x=gt′2=
0 1
20 m
设其向下减速的加速度大小为a 时,恰好到达地面前瞬间速度为零,此时a 为最小加速度
2 2
大小,则H-x=,代入数据解得a=4 m/s2。
2 1 2微点突破 1 追及相遇问题
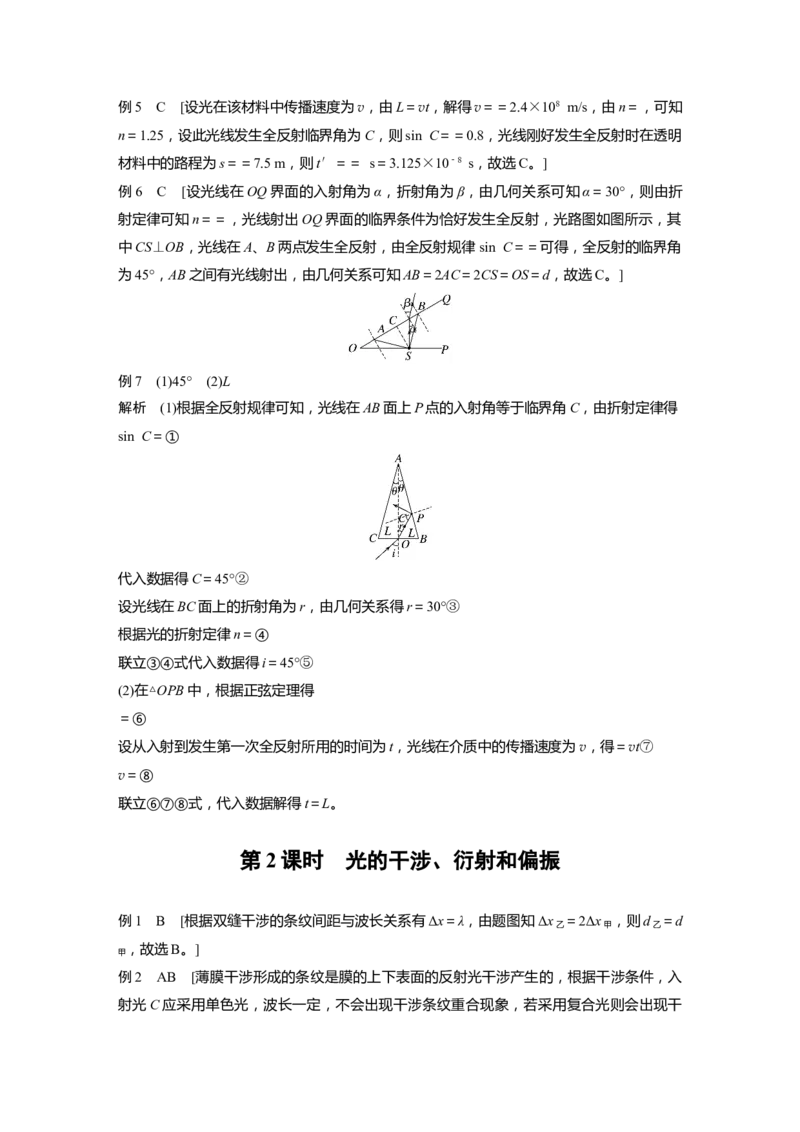
例1 (1)6 m/s (2)20 s 40 m/s (3)225 m
解析 (1)赛车出发3 s末的瞬时速度大小为v=at=2×3 m/s=6 m/s。
1 11
(2)设经t 时间追上安全车,由位移关系得vt+200 m=at2,
2 02 12
解得t=20 s,此时赛车的速度v=at=2×20 m/s=40 m/s
2 12
(3)方法一 物理分析法
当两车速度相等时,两车相距最远
由v=at 得两车速度相等时,经过的时间t== s=5 s
0 13 3
追上之前两车最远相距
Δs=vt+200 m-at2=
03 13
(10×5+200-×2×52) m=225 m。
方法二 二次函数法
Δs=vt+200-at2=10t+200-t2
0 1
当t== s=5 s时,Δs有极值,相距最远,将t=5 s代入解得Δs =225 m。
max
方法三 图像法
从图像可知,当赛车速度等于安全车速度时,即v =at=10 m/s,得t=5 s时相距最远,
0 1
Δs =vt-t+200 m=225 m。
max 0
拓展 20 s
解析 方法一:物理分析法
假设再经t 时间两车第二次相遇(两车一直在运动),由位移关系得
4
vt-at2=vt,解得t=15 s
4 24 04 4
赛车停下来的时间t′== s=10 s
所以t=15 s不符合实际,两车第二次相遇时赛车已停止运动
4
设再经时间t 两车第二次相遇,应满足=vt,解得t=20 s。
5 05 5
方法二:图像法赛车和安全车的v-t图像如图。由图知t=10 s,赛车停下时,安全车的位移小于赛车的位
移,由vt=,得t=20 s。
05 5
例2 (1)0.4 m/s2 (2)380 m
(3)0.5 m/s2
解析 (1)设B车减速运动的加速度大小为a,则有0-v 2=-2ax
2 B 2 1
解得a== m/s2=0.4 m/s2
2
(2)设B车从刹车到停止的时间为t′,则t′== s=100 s
B车刹车t=20 s运动的位移为
1
x=v t-at2=720 m
1 B1 21
B车刹车t=20 s,A车运动的位移大小
1
x=v t=10×20 m=200 m
2 A1
B车刹车t=20 s后,两车的距离
1
Δx=d+x-x=900 m+200 m-720 m=380 m
2 1
(3)B车刹车t=30 s后,B车运动的速度v ′=v -at=40 m/s-0.4×30 m/s=28 m/s,B车
2 B B 22
运动的位移
x=v t-at2=1 020 m
3 B2 22
A车运动的位移x=v t=300 m
4 A2
A、B两车的距离为d′=d+x-x=180 m
4 3
为保证两车恰好不相撞,则B车追上A车时两车速度恰好相等
设B车减速t秒时两车的速度相同,有v ′-at=v +a t,x =v t+a t2,x =v ′t-at2,
B 2 A A A A A B B 2
x -x =d′
B A
解得a ==0.5 m/s2。
A
例3 BD [v-t图像中图线的斜率即为物体运动的加速度,所以乙车的加速度为 a =
乙
m/s2=0.2 m/s2,故A错误;由题图可得第5 s末时,两车的速度分别为v = m/s=3 m/s,
甲
v = m/s=5 m/s,v-t图像中图线与t轴所围成图形的面积表示物体运动的位移,所以由x
乙
=·t,可得0~5 s内两车运动的位移分别为x =×5 m=7.5 m,x =×5 m=22.5 m,所以
甲 乙
第5 s末两车相距Δx=x -x +x =40 m,故B正确;当两车速度相等时,两车相距最远,
乙 甲 0
由题图可知,第10 s末时,两车速度相等,之间的距离最大。0~10 s内两车运动的位移分
别为x ′=×10 m=30 m,x ′=×10 m=50 m,所以第10 s末两车相距Δx′=x ′-x ′+
甲 乙 乙 甲
x =45 m,故C错误;由题图可得甲车的加速度为a = m/s2=0.6 m/s2,设经过时间t甲车
0 甲
追上乙车,则x ″-x ″=x ,x ″=a t2=0.3t2,x ″=vt+a t2=4t+0.1t2,联立解得t=
甲 乙 0 甲 甲 乙 0 乙
25 s,所以25 s末时甲车追上乙车,D正确。]
例4 C [在0~3 s内A车做匀减速运动,A车减速到零所需时间t ==3 s,故在t=3 s时
AA车减速到零,A车前进的位移为x =t =45 m,B车前进的位移为x =vt =90 m,t=3 s
A A B 0A
时两车间距离为Δx=d+x -x =55 m,故A错误;由题图可知在3~9 s内A车的加速度为
A B
a =5 m/s2,在v-t图像中,图像的斜率表示加速度,则a ==-5 m/s2,故A、B两车的
A2 B
加速度大小相等,故B错误;t=3 s后,A车开始由静止做匀加速运动,B车开始做匀减速
运动,3~9 s的过程中,设经历时间t两者速度相同,则v =a t=v +a t,解得t=3 s,v
共 A2 0 B
=15 m/s,A车在t=3 s内前进的位移为x=t=22.5 m,B车前进的位移为x=t=67.5 m,
共 1 2
故此时两车相距的最小距离为Δx =Δx+x-x=10 m,此后A车的速度大于B车的速度,
min 1 2
两者间的距离开始增大,故不可能相遇,故C正确,D错误。]
跟踪训练
1.B [设运动员加速时间为t ,追上时两者位移相等,即v-t图像与t轴所围面积相等,
1
有
×12×t=×8×t+8×(t-t),解得t=2t,则加速度之比===,故选B。]
2 1 2 1 2 1
2.BC [由匀变速直线运动规律可知x=vt+at2,由题图乙可知当t=2 s时x=10 m,当t=
0
5 s时x=40 m,解得v =3 m/s,a=2 m/s2,故A错误;由题图乙可知B车匀速运动的速度
0
v = m/s=10 m/s,由匀变速直线运动规律可得v =v +at=v ,解得t=3.5 s,故B正确;
B A 0 B
A车加速到v =54 km/h=15 m/s后做匀速运动,追上B车的时间最短,由v =v +at ,
max max 0 0
可知A车的加速时间t =6 s,A车追上B车满足v t=vt +at2+v (t-t),解得t=7.2 s,
0 B 00 0 max 0
此后A车速度大于B车,不会再相遇,故C正确,D错误。]
3.(1)56 m (2)15 s
解析 (1)当两车速度相等时,两车的距离最大,设经过时间t 两车速度相等,则有v =v -
1 1 2
at,得t=6 s
1 1
在t 时间内A车位移为x=vt=48 m
1 1 11
B车位移为x=vt-at2=84 m
2 21 1
则此最远的距离为Δx=x+x-x=56 m
2 0 1
(2)设经过时间t,B车停下来,则有
2
0=v-at,得t=10 s
2 2 2
此过程中A车和B车的位移分别为
x′=vt=80 m
1 12
x′=vt-at2=100 m
2 22 2
此时x′+x>x′
2 0 1
说明A车还没追上B车,设再经过时间t 才追上,则有x′+x -x′=vt 得t =5 s,所以
3 2 0 1 13 3
A车追上B车所用的时间为t=t+t=15 s。
2 3
4.(1) m/s2 (2) m/s2 (3)1 m/s2解析 (1)若A车选择放弃超车, 回到B车所在车道,当两车速度相同时,A恰好追上B,
此时A加速度最小,根据运动学公式有v -at=v
A 11 B
v t-at2=v t+L-L
A1 11 B1 B
联立解得A车的最小加速度为a= m/s2
1
(2)A车加速超车最长时间为
t== s=5 s
2
A车安全超车,根据运动学公式有
v t+at2=v t+L+L
A2 22 B2 A
解得A车能够安全超车的加速度至少为a= m/s2
2
(3)C车做匀减速运动最长时间为
t== s=6 s
3
A车安全超车,根据运动学公式有
v t+v t-at2=d+L,解得C车减速的最小加速度为a=1 m/s2。
A3 C3 33 3
第 4 课时 专题强化:运动学图像问题
例1 B [根据题图(b)可知,机器人在0~30 s内的位移大小为2 m,故A错误;10~30 s
内,平均速度大小为== m/s=0.35 m/s,故B正确;位移—时间图线的斜率表示速度,0
~10 s内,图线的斜率不变,机器人做匀速直线运动,故C错误;0~10 s内图线的斜率与
10~20 s内图线的斜率关系为k =-k ,可知机器人在5 s末的速度与15 s末的速度等大反
1 2
向,故D错误。]
例2 D [根据v-t图像的斜率表示加速度,由题图可知0~t 时间内,训练后运动员的平
1
均加速度比训练前的小,故A错误;根据v-t图像与横轴围成的面积表示位移,由题图可
知0~t 时间内,训练前运动员跑过的距离比训练后的大,故B错误;由题图可知t~t 时间
2 2 3
内,训练后运动员的位移比训练前的位移大,根据平均速度等于位移与时间的比值,可知训
练后运动员的平均速度大,故C错误;根据v-t图像可直接判断知,t 时刻后,运动员训练
3
前速度减小,做减速运动;t 时刻后,运动员训练后速度增加,做加速运动,故D正确。]
3
例3 BD [质点在0~t 时间内从静止出发先做加速度增大的加速运动再做加速度减小的加
0
速运动,此过程一直向前加速运动,t ~2t 时间内加速度和速度反向,先做加速度增加的减
0 0
速运动再做加速度减小的减速运动,2t 时刻速度减速到零,此过程一直向前做减速运动,
0
2t ~4t 重复此过程的运动,即质点一直向前运动,A、C错误,B正确;a-t图像与t轴所
0 0
围的面积表示速度变化量,~t 时间内速度的变化量为零,因此时刻P的运动速度与t 时刻
0 0
相同,D正确。]例4 BD [由x=vt+at2得=v +at,对照题图可知v =4 m/s,a=-2 m/s2,即质点的初
0 0 0
速度大小为4 m/s,加速度大小为2 m/s2,故A错误,B正确;根据匀变速直线运动的规律
可知,第4 s末质点的速度为v=v+at=4 m/s-2×4 m/s=-4 m/s,故C错误;根据匀变速
0
直线运动的规律可知,0~4 s内,质点的位移为x=vt+at2=4×4 m-×2×42 m=0,故D
0
正确。]
例5 D [依题意,根据匀变速直线运动位移速度公式v2-v2=2ax可得x==v2-,结合题
0
图 可 知 该 物 块 做 匀 加 速 直 线 运 动 , 故 A 错 误 ; 根 据 题 图 可 得 = =
(m/s2)-1= (m/s2)-1,v2=4 (m/s)2,可得该物块经过坐标原点时的速度及加速度分别为v =
0 0
2 m/s,a=1 m/s2,故B错误;t=2 s时物块的速率为v=v +at=(2+1×2) m/s=4 m/s,故
0
C错误;t=2 s时,物块的位置坐标为x=vt+at2=(2×2+×1×22) m=6 m,故D正确。]
0
例6 A [x-t图像斜率的物理意义是速度,在0~t 时间内,x-t图像斜率增大,汽车的速
1
度增大;在t ~t 时间内,x-t图像斜率不变,汽车的速度不变;在t ~t 时间内,x-t图像
1 2 2 3
的斜率减小,汽车做减速运动,综上所述可知A中v-t图像可能正确,故选A。]
第 5 课时 实验一:探究小车速度随时间变化的规律
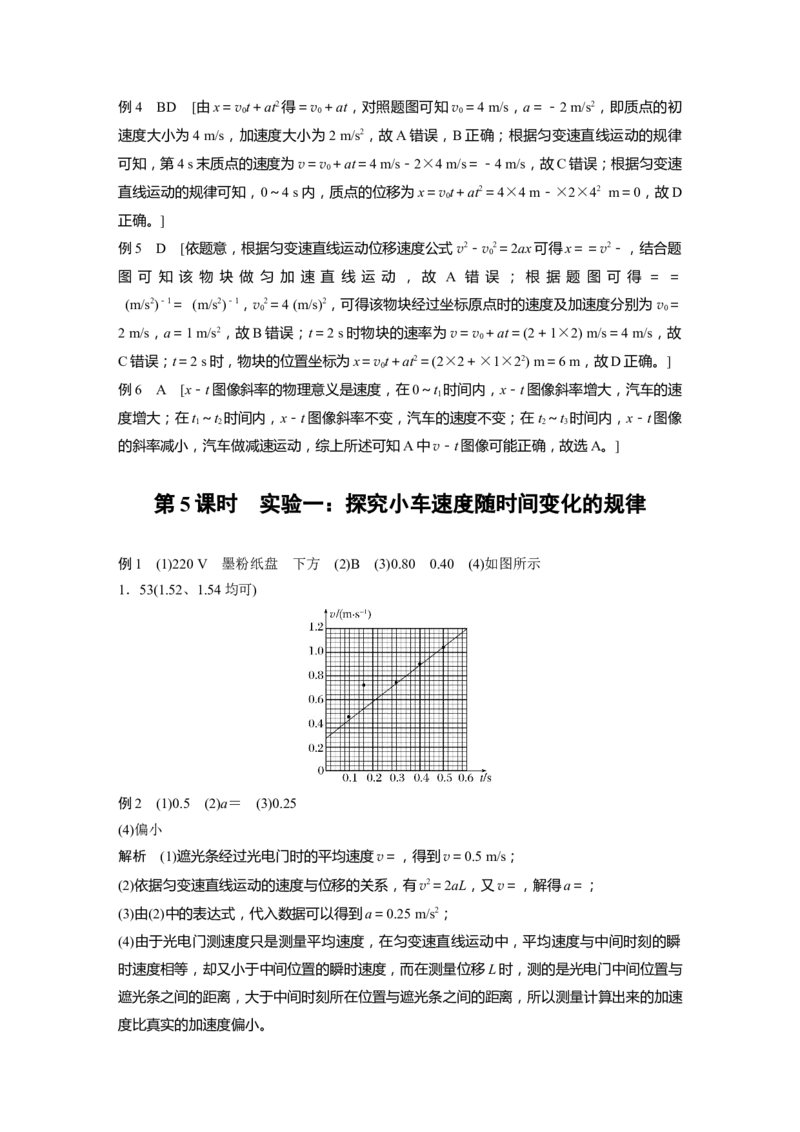
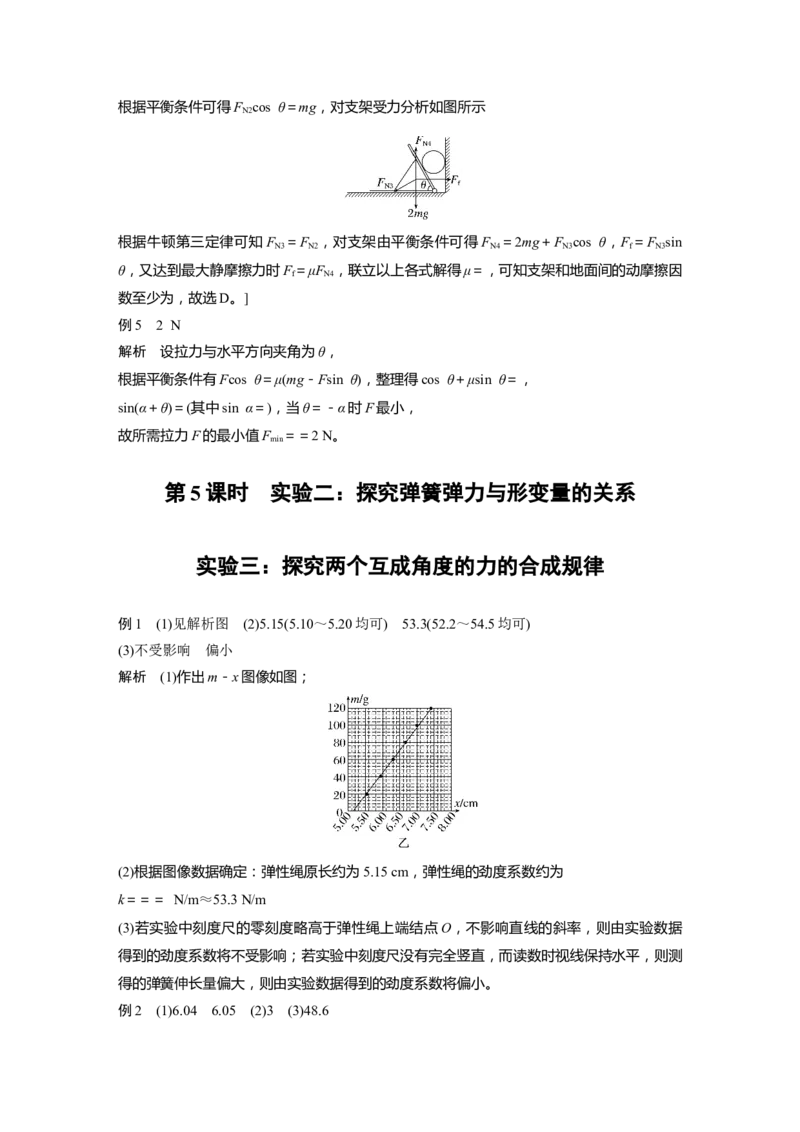
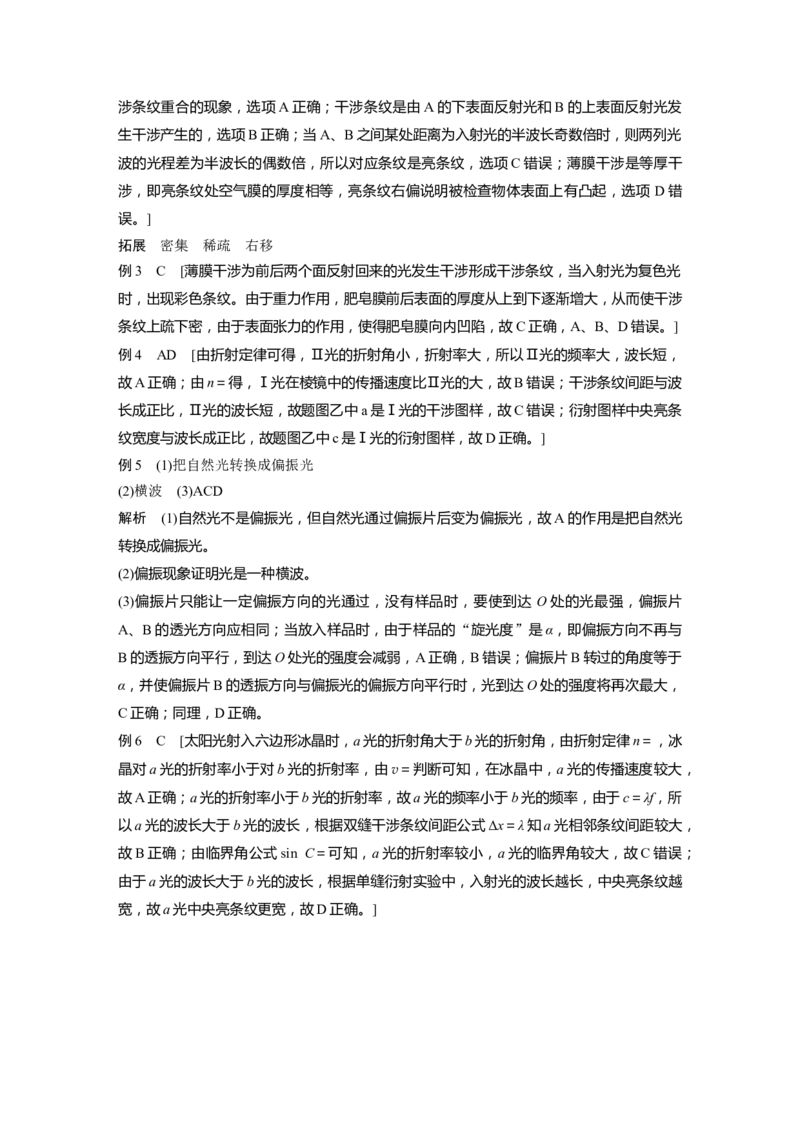
例1 (1)220 V 墨粉纸盘 下方 (2)B (3)0.80 0.40 (4)如图所示
1.53(1.52、1.54均可)
例2 (1)0.5 (2)a= (3)0.25
(4)偏小
解析 (1)遮光条经过光电门时的平均速度v=,得到v=0.5 m/s;
(2)依据匀变速直线运动的速度与位移的关系,有v2=2aL,又v=,解得a=;
(3)由(2)中的表达式,代入数据可以得到a=0.25 m/s2;
(4)由于光电门测速度只是测量平均速度,在匀变速直线运动中,平均速度与中间时刻的瞬
时速度相等,却又小于中间位置的瞬时速度,而在测量位移L时,测的是光电门中间位置与
遮光条之间的距离,大于中间时刻所在位置与遮光条之间的距离,所以测量计算出来的加速
度比真实的加速度偏小。例3 (1)小钢球 (2)①③④②
(3)9.6(9.5、9.7均可) (4)仍能
解析 (1)小钢球受到的空气阻力相比其重力很小,可近似认为做自由落体运动,故选小钢
球。
(2)安装好器材后,先固定手机调好镜头位置,再打开手机摄像功能进行摄像,再由静止释
放小球,故顺序是①③④②。
(3)由题图读得x=2.50 cm,
1
x=26.50 cm,x=77.20 cm,
2 3
由(x-x)-(x-x)=gT2,
3 2 2 1
T= s,解得g≈9.6 m/s2。
(4)释放时手晃动,导致小球的运动偏离了竖直方向,但在小球下落过程中,小球竖直分运
动仍然是加速度为重力加速度g的运动,故仍能用(3)问的方法测出重力加速度。
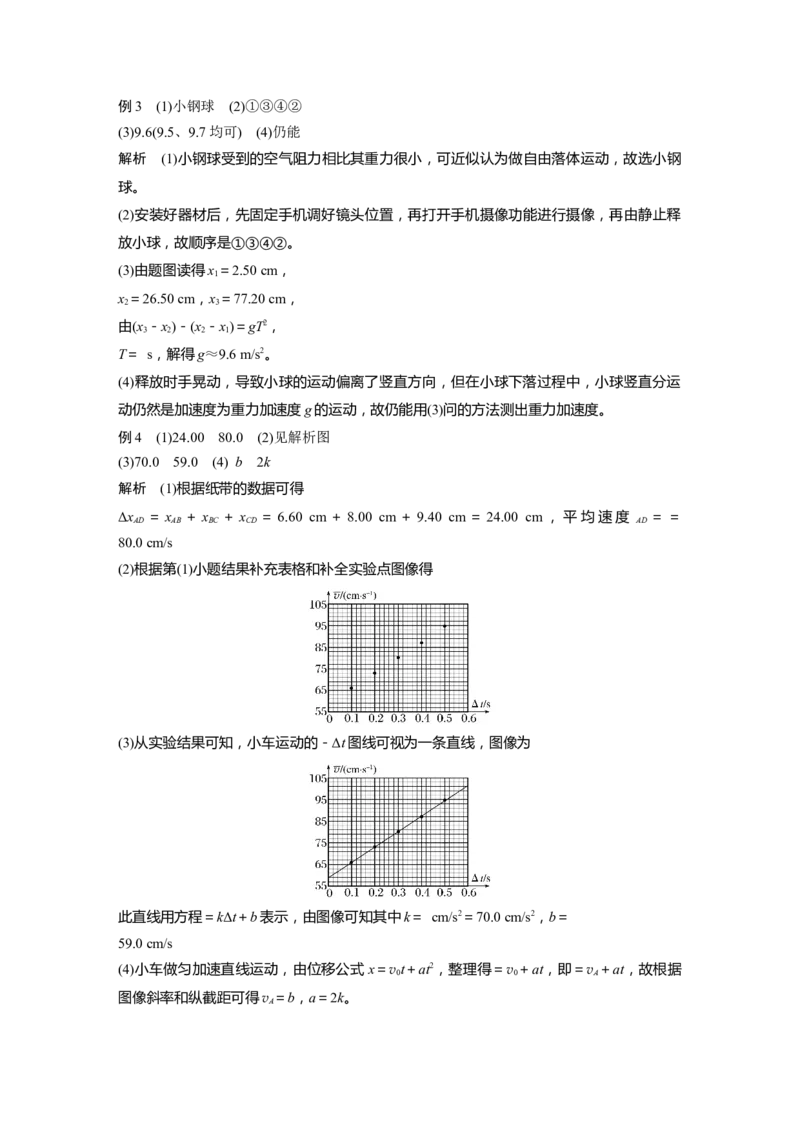
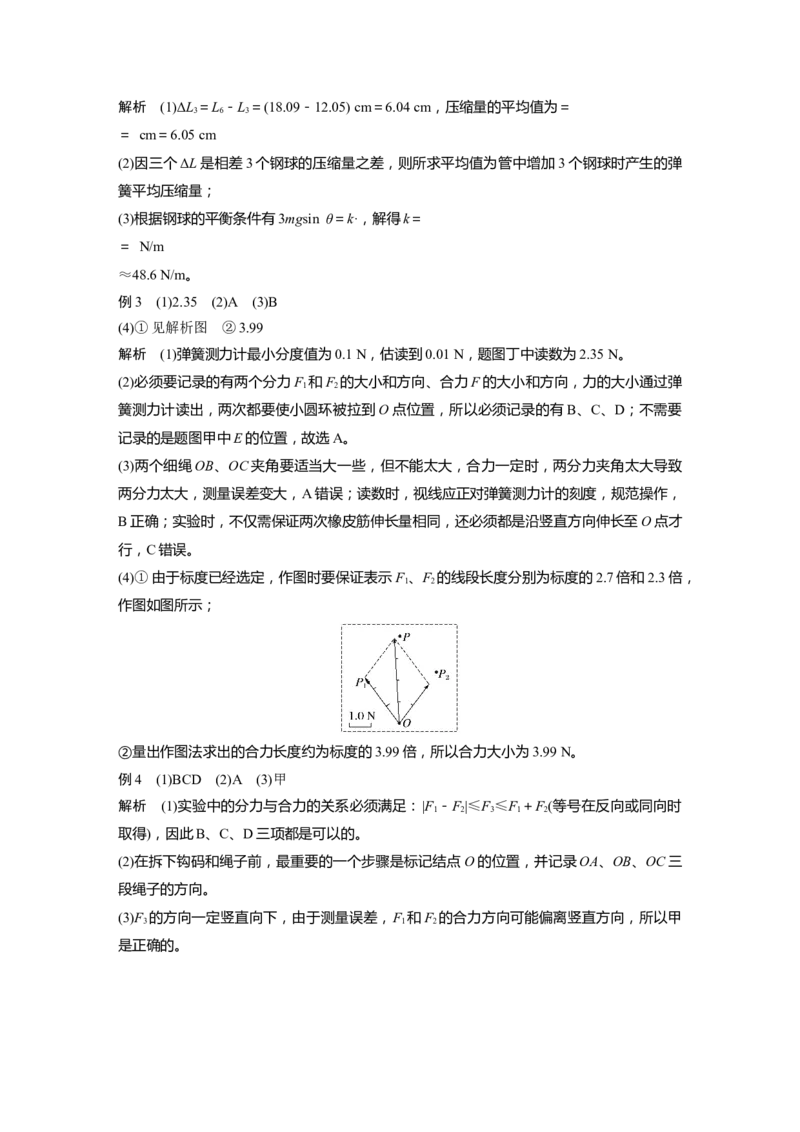
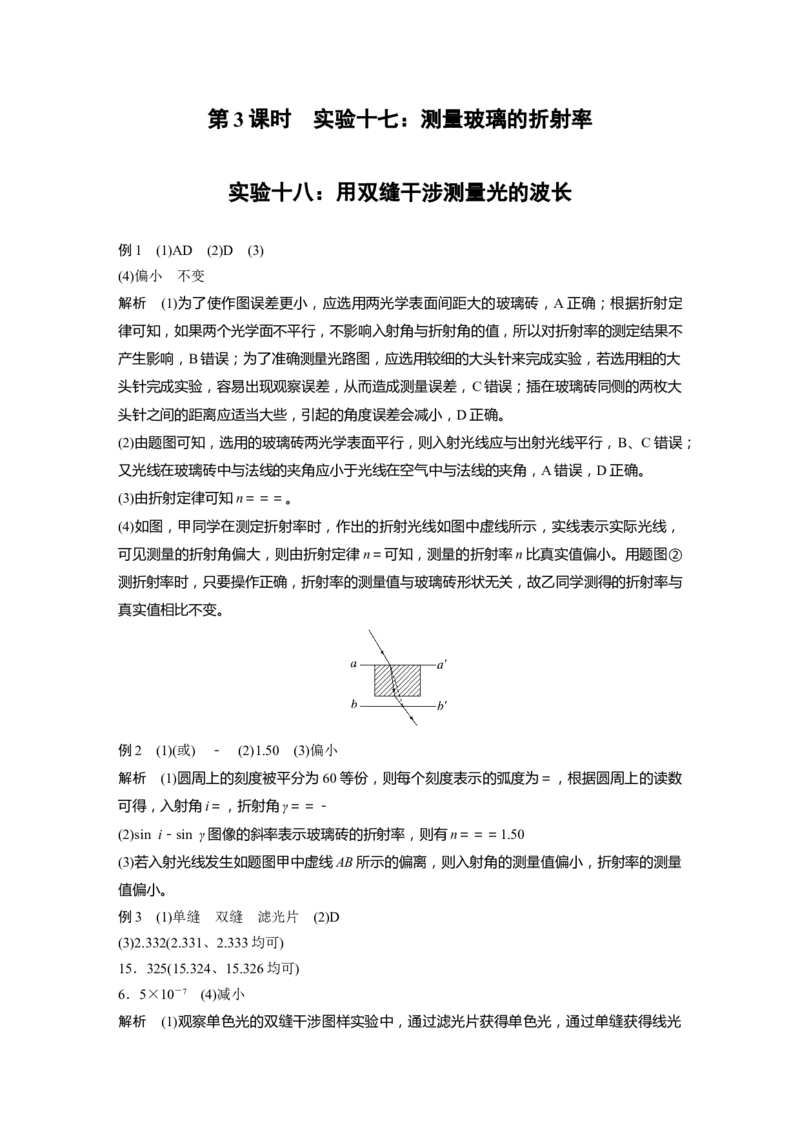
例4 (1)24.00 80.0 (2)见解析图
(3)70.0 59.0 (4) b 2k
解析 (1)根据纸带的数据可得
Δx =x +x +x =6.60 cm+8.00 cm+9.40 cm=24.00 cm,平均速度 ==
AD AB BC CD AD
80.0 cm/s
(2)根据第(1)小题结果补充表格和补全实验点图像得
(3)从实验结果可知,小车运动的-Δt图线可视为一条直线,图像为
此直线用方程=kΔt+b表示,由图像可知其中k= cm/s2=70.0 cm/s2,b=
59.0 cm/s
(4)小车做匀加速直线运动,由位移公式 x=vt+at2,整理得=v +at,即=v +at,故根据
0 0 A
图像斜率和纵截距可得v =b,a=2k。
A第二章 相互作用
第 1 课时 重力 弹力 摩擦力
例1 D [水管口持续有水流出,而过一段时间桶会翻转一次,主要原因是流入的水导致水
桶与水整体的重心往上移动,桶中的水到一定量之后水桶不能保持平衡,发生翻转,故选
D。]
例2 C [选项A中小球只受重力和杆的弹力的作用,且处于静止状态,由二力平衡可得小
球受到的弹力方向应竖直向上,故A错误;选项B中,因为右边的绳竖直向上,如果左边
的绳有拉力,则竖直向上的那根绳就会发生倾斜,所以左边的绳没有拉力,故B错误;球
与球接触处的弹力方向,垂直于过接触点的公切面(即弹力方向在两球心的连线上),且指向
受力物体,球与墙面接触处的弹力方向过接触点垂直于接触面,故C正确;球与面接触处
的弹力方向,过接触点垂直于接触面(即弹力方向在接触点与球心的连线上),即选项D中大
半圆对小球的支持力F 的方向应是沿着过小球与圆弧接触点的半径,且指向圆心,故D错
N2
误。]
例3 B [小球光滑时,若弹簧P无拉力,则弹簧Q一定有拉力,斜面对小球有支持力,小
球可以平衡,A错误;小球光滑时,若弹簧P和Q都有拉力,斜面对小球一定有支持力,否
则不会平衡,小球受4个力的作用,B正确;斜面和小球都不光滑时,若弹簧P无拉力且小
球处于平衡状态,对小球受力分析,受到竖直向下的重力,斜面的支持力,受到的摩擦力可
能沿斜面向下也可能沿斜面向上,还可能为零,弹簧 Q可能伸长也可能压缩,还可能处于
原长状态,C错误;斜面和小球都不光滑时,对小球受力分析,受到竖直向下的重力,若弹
簧Q无拉力,小球受到弹簧P的拉力与重力平衡时,不受支持力,即小球与斜面间有可能
无弹力,D错误。]
例4 B [由题知,取走一个盘子,稳定后余下的盘子正好升高补平,则说明一个盘子的重
力可以使三根弹簧发生形变的形变量恰好等于相邻两盘间距,则有 mg=3kx,解得k=
100 N/m,故选B。]
例5 CD [第1张白纸相对于滚轮的运动趋势与滚轮的运动方向相反,则受到滚轮的静摩
擦力方向与滚轮的运动方向相同,即受到滚轮的摩擦力向右,A错误;对除第1张白纸外的
所有白纸进行研究,处于静止状态,水平方向受到第1张白纸的滑动摩擦力,方向与滚轮的
运动方向相同,则根据平衡条件知,最后1张白纸受到纸槽底座的摩擦力方向与滚轮的运动
方向相反,即水平向左,B错误;根据题意,因上一张白纸相对下一张白纸向右滑动或有向
右滑动的趋势,则上一张白纸受到下一张白纸的摩擦力一定向左,那么下一张白纸受到上一张白纸的摩擦力一定向右,C正确;正常情况下单张纸打印必须满足滚轮与白纸之间的最大
静摩擦力大于纸与纸之间的滑动摩擦力,则μ>μ,D正确。]
1 2
拓展 (1)滚轮与第一张白纸间的摩擦力为静摩擦力,小于或等于最大静摩擦力,甲同学说
法错误;
(2)第一、二张白纸间的摩擦力为滑动摩擦力,大小为 F =μ(F+mg),第二张白纸处于静
f12 2
止状态,第二、三张白纸间的摩擦力为静摩擦力,大小等于第一、二张白纸间的摩擦力,即
F =μ(F+mg),除第一张白纸外,所有白纸均处于静止状态,白纸间的摩擦力均为 μ(F+
f23 2 2
mg),大小相等,故乙同学说法错误。
例6 C [每本书受到的摩擦力的合力与重力平衡,因为每本书的质量相等,则每本书受到
的摩擦力的合力大小相等,A错误;越靠外侧,书与书间的摩擦力越大,B错误;以这一摞
书为研究对象,每只手对其最大静摩擦力为F =μF =60 N,这一摞书受力平衡,则2F =
f1 1 N f1
nmg,解得n =60,但书与书间的最大静摩擦力为F =μF =40 N,除了左右两侧跟手接
1 1 f2 2 N
触的两本书,以剩下的这一部分书为研究对象,由平衡条件有2F =nmg,解得n =40,加
f2 2 2
上与手接触的两本书,共42本书,C正确,D错误。]
微点突破 2 摩擦力的突变问题
例1 C [由题意得,物体A与小车的上表面间的最大静摩擦力F ≥5 N,当小车加速运动
fm
时,假设物体A与小车仍然相对静止,则物体A所受合力大小F =ma=10 N,可知此时
合
小车对物体A的摩擦力大小为5 N,方向向右,且为静摩擦力,所以假设成立,物体A受到
的摩擦力大小不变,故A、B错误,C正确;弹簧长度不变,物体A受到的弹簧的拉力大小
不变,故D错误。]
例2 ABC [在t=0时刻,力传感器显示拉力为2 N,则滑块受到的摩擦力为静摩擦力,大
小为2 N,由小车与空沙桶受力平衡,可知空沙桶的重力也等于2 N,A选项正确;t=50 s
时,静摩擦力达到最大值,即最大静摩擦力为3.5 N,同时小车启动,说明沙子与沙桶总重
力等于3.5 N,此时静摩擦力突变为滑动摩擦力,滑动摩擦力大小为3 N,B、C选项正确;
此后由于沙子和沙桶总重力3.5 N大于滑动摩擦力3 N,故第50 s后小车将做匀加速直线运
动,D选项错误。]
例3 B [滑块上滑过程中受滑动摩擦力,F=μF ,F =mgcos θ,联立得F=6.4 N,方向
f N N f
沿斜面向下。当滑块的速度减为零后,由于重力的分力mgsin θ<μmgcos θ,滑块静止,滑
块受到的摩擦力为静摩擦力,由平衡条件得F′=mgsin θ,代入数据可得F′=6 N,方向
f f
沿斜面向上,故选项B正确。]
例4 BD [当小木块速度小于传送带速度时,小木块相对于传送带向上滑动,小木块受到
的滑动摩擦力沿传送带向下,加速度a=gsin θ+μgcos θ;当小木块速度与传送带速度相同时,由于μβ,故F a ,由x=at2可知,
ca Obt>t ,即t>t=t,故B、C、D正确。]
2 ca 2 1 3
拓展 t=t
4 1
例4 BC [根据牛顿第二定律有F-μmg=ma,整理得F=ma+μmg,可知F-a图像的斜
率为m,纵轴截距为μmg,则由题图可看出m >m ,μ m g=μ m g,则μ <μ 。故选
甲 乙 甲 甲 乙 乙 甲 乙
B、C。]
例5 BCD [由题图(c)可知,t 时刻物块、木板一起刚要在水平地面上滑动,物块与木板相
1
对静止,此时以整体为研究对象有F=μ(m+m)g,故A错误;由题图(c)可知,t 时刻物块
1 1 1 2 2
与木板刚要发生相对滑动,以整体为研究对象, 根据牛顿第二定律,有 F -μ(m +m)g=
2 1 1 2
(m+m)a,
1 2
以木板为研究对象,根据牛顿第二定律,有μmg-μ(m+m)g=ma>0,
2 2 1 1 2 1
解得F=(μ-μ)g,
2 2 1
可知μ>μ,故B、C正确;
2 1
由题图(c)可知,0~t 时间段物块与木板相对静止,所以有相同的加速度,故D正确。]
2
第 3 课时 专题强化:牛顿第二定律的综合应用
例1 C [若设木块和地面间的动摩擦因数为μ,以两木块整体为研究对象,根据牛顿第二
定律有F-μ(m +m)g=(m +m)a,得a=,以木块1为研究对象,根据牛顿第二定律有F
1 2 1 2 T
-μm g=ma,得a=,系统加速度与木块1加速度相同,联立解得F =F,可知绳子拉力大
1 1 T
小与动摩擦因数μ无关,与两木块质量大小有关,无论水平面是光滑的还是粗糙的,绳的拉
力大小均为F =F,且m 越大,绳的拉力越小,故选C。]
T 2
拓展 (1)① ②
(2)
例2 (1)g (2)mg或Mg
解析 (1)设物体B运动过程中的加速度大小为a,绳子的张力为F ,对物体A,F -Mg=
T T
Ma
对B、C整体,(M+m)g-F =(M+m)a,解得a=g
T
因为m=M,所以a=g
(2)设B、C间的拉力为F,
对物体C,mg-F=ma
解得F=mg-ma=mg=Mg
所以C、B间的作用力为mg或Mg。
例3 AB [根据题图乙可知,发生相对滑动时,A、B间的滑动摩擦力为6 N,所以A、B
之间的动摩擦因数μ==0.2,选项A正确;当0<F<4 N时,根据题图乙可知,F 还未达
f2到B与地面间的最大静摩擦力,此时A、B保持静止,选项B正确;当4 N<F<12 N时,
根据题图乙可知,此时A、B间的摩擦力还未达到最大静摩擦力,所以没有发生相对滑动,
选项C错误;当F>12 N时,根据题图乙可知,此时A、B发生相对滑动,对A物块有a=
=2 m/s2,加速度不变,选项D错误。]
例4 C [施加外力前,系统处于静止状态,对整体受力分析,由平衡条件得2mg=kx ,代
0
入数据解得x=0.4 m,外力施加的瞬间,物体A加速度为4 m/s2,对整体,由牛顿第二定律
0
得F-2mg+kx =2ma,代入数据解得F=8 N,故A错误;当弹簧压缩量减小到0.3 m时,
0
设A、B间弹力大小为F ,对A受力分析,由牛顿第二定律得F′+F -mg=ma,对A、
AB AB
B组成的系统受力分析,由牛顿第二定律得F′+kx -2mg=2ma,代入数据联立解得F =
1 AB
1 N,故B错误;设A、B分离时,弹簧的形变量为x ,对B受力分析,由牛顿第二定律得
2
kx -mg=ma,代入数据解得x =0.28 m,所以A物体的位移大小为x -x =0.4 m-0.28 m
2 2 0 2
=0.12 m,故C正确;当B物体的合力为零时速度达到最大,由C可知A、B分离时有向上
的加速度,所以速度最大时A、B已经分离,当合力为零时,对B受力分析,由平衡条件得
kx=mg,代入数据解得x=0.2 m,故B物体的位移大小为x-x=0.2 m,故D错误。]
3 3 0 3
例5 (1)2 m/s2 (2)0.5 (3) N
解析 (1)根据L=vt+at2,
0
代入数据解得a=2 m/s2。
(2)根据牛顿第二定律有F-mgsin θ-μmgcos θ=ma,代入数据解得μ=0.5。
(3)设F与斜面夹角为α,
平行斜面方向有
Fcos α-mgsin θ-μF =ma
N
垂直斜面方向有F +Fsin α=mgcos θ
N
联立解得
F=
=
当sin(φ+α)=1时,F有最小值F ,代入数据解得F = N。
min min
第 4 课时 专题强化:“传送带”模型中的动力学问题
例1 ABD [若传送带速度较小,滑块可能先在传送带上做匀加速直线运动,加速度不变,
与传送带共速后,做匀速直线运动,加速度为零。若传送带速度足够大,滑块可能在传送带
上一直做匀加速直线运动,最终还未与传送带共速就已离开传送带,故 C错误,A、B、D
正确。]例2 AD [开始时行李的加速度大小为a==2 m/s2,A正确;行李与传动带共速时t ==
1
0.2 s,行李的位移为x=at2=0.04 m,行李匀速运动的时间为t ==4.9 s,行李到达B处的
1 2
时间为t=t +t =5.1 s,B错误;行李在传送带上留下的摩擦痕迹长度为Δx=vt -x=0.04
1 2 1
m,C 错误;共速时传送带立刻停止运动,行李做匀减速运动的位移为 x ==
1
0.04 m,两段划痕的长度重合,则摩擦痕迹长度为0.04 m,D正确。]
例3 BC [相对地面而言,小物块在0~t 时间内,向左做匀减速直线运动,t 之后反向向
1 1
右运动,故小物块在t 时刻离A处距离最大,A错误;小物块在0~t 时间内,向左做匀减
1 1
速直线运动,相对传送带向左运动,在t ~t 时间内,反向向右做匀加速直线运动,但速度
1 2
小于传送带的速度,相对传送带向左运动,t 时刻两者同速,在t ~t 时间内,小物块相对
2 2 3
于传送带静止,所以t 时刻小物块相对传送带滑动的距离达到最大值,B正确;0~t 时间内,
2 2
小物块相对传送带向左运动,始终受到向右的滑动摩擦力,滑动摩擦力的大小和方向都不变,
故C正确,D错误。]
例4 (1)不能 (2)1.5 s (3)5 m
解析 (1)由于mgsin 37°>μmgcos 37°,所以煤块与传送带速度相同后,它们不能相对静止。
(2)煤块刚放上时,受到沿斜面向下的摩擦力,其加速度为a=g(sin θ+μcos θ)=10 m/s2,
1
煤块加速运动至与传送带速度相同时需要的时间t==1 s,发生的位移x=at2=5 m
1 1 11
煤块速度达到v 后,加速度大小改变,继续沿传送带向下加速运动,则有
0
a=g(sin θ-μcos θ)=2 m/s2,
2
x=L-x=5.25 m,
2 1
由x=vt+at2,得t=0.5 s,故煤块从A运动到B的时间为t=t+t=1.5 s。
2 02 22 2 1 2
(3)第一过程痕迹长Δx=vt-x=5 m,第二过程痕迹长Δx=x-vt=0.25 m,Δx 与Δx 部
1 01 1 2 2 02 2 1
分重合,故痕迹总长为5 m。
拓展 1.441 s
解析 由于F=μ′F =μ′mgcos θ=mgsin θ,即最大静摩擦力等于煤块重力沿传送带向下
f N
的分力,故煤块和传送带达到共速后将做匀速直线运动,所以煤块先做匀加速直线运动,后
做匀速直线运动。a′=g(sin θ+μ′cos θ)=12 m/s2,加速时间t′== s≈0.833 s,加速
1
位移x′=a′t′2= m,匀速运动位移x′=L-x′≈6.08 m,匀速运动时间t′== s
1 1 2 1 2
=0.608 s
总时间t′=t′+t′=1.441 s。
1 2
例5 D [从图像可知,物块速度减为零后沿传送带反向向上运动,最终的速度大小为 1
m/s,因此没从N点离开,可知传送带顺时针运动,速度大小为 1 m/s,故A、B错误;v-t
图像中斜率表示加速度,可知物块沿传送带下滑时的加速度大小为 a= m/s2=2.5 m/s2,故
C错误;速度图像与时间轴围成的面积表示位移,由图像可知,t = s时,物块的速度为
1
0,之后物块沿传送带向上运动,所以物块沿传送带向下运动的位移x =×4× m= m,t
1 1= s到t =2 s,物块沿传送带向上加速运动的位移x =×1 m= m,物块沿传送带向上匀速
2 2
运动的时间t ==3 s,所以物块回到原处的时间t=3 s+2 s=5 s,故D正确。]
匀
第 5 课时 专题强化:“滑块—木板”模型中的动力学问题
例1 (1)10 N (2)①3 m/s2 ②0.5 m
③2.8 m/s ④0.7 m
解析 (1)当物块和木板恰好发生相对滑动时,静摩擦力达到最大值,设此时的加速度为
a,根据牛顿第二定律,对小物块有μmg=ma ,对物块和木板整体有F=(m+M)a,
0 0 0 0
联立解得F=10 N,即若小物块和木板发生相对滑动,拉力不小于10 N。
0
(2)①对长木板,根据牛顿第二定律可得F-μmg=Ma,解得a=3 m/s2
②撤去F之前,小物块只受摩擦力的作用,故a =a=μg=2 m/s2
m 0
Δx=at2-a t2=0.5 m
1 m
③刚撤去F时v=at=3 m/s,v =a t=2 m/s
m m
撤去F后,长木板的加速度大小a′==0.5 m/s2
最终速度v′=v +a t′=v-a′t′
m m
解得共同速度v′=2.8 m/s
④在t′内,小物块和长木板的相对位移Δx=-,解得Δx=0.2 m,最终小物块离长木板右
2 2
端的距离为x=Δx+Δx=0.7 m。
1 2
例2 ABD [由题图乙可知,2 s后物块和木板达到共速后一起匀速运动,说明木板与地面
之间无摩擦,v-t图像中图线与t轴围成的面积表示物体的位移,故由题图乙可知,在2 s
内物块的位移为x =4 m,木板的位移为x =2 m,故长木板的最小长度为L=x -x =2 m,
1 2 1 2
A正确;由题图乙可知,1 s时撤去外力F,在1~2 s内由物块的受力及牛顿第二定律可知
μmg=ma ,由题图乙可知1~2 s内物块的加速度大小为a =1 m/s2,解得A、B间的动摩擦
A A
因数为μ=0.1,B正确;由题图乙可知,木板的加速度大小为a =1 m/s2,由木板B的受力
B
及牛顿第二定律可知μmg=Ma ,解得长木板的质量为M=1 kg,C错误;由0~1 s内物块
B
的受力及牛顿第二定律可知F-μmg=ma ′,又此过程中加速度的大小为a ′=3 m/s2,解
A A
得F=4 N,D正确。]
例3 (1)4 m/s (2)12 m/s2 4 m/s2
(3)8 m/s 3 m
解析 (1)由牛顿第二定律知μmg=ma ,A加速度的大小a =μg
A A
根据匀变速直线运动速度位移关系v 2=2a L,解得v ==4 m/s。
A A A
(2)在左边缘再次对齐前,对B,根据牛顿第二定律得μmg+2μmg=ma ,解得a =3μg=12 m/s2
B B
对齐后,对A、B整体,根据牛顿第二定律得2μmg=2ma ′,
B
解得a ′=μg=4 m/s2
B
(3)经过时间t,A、B达到共同速度v,位移分别为x 、x ,A加速度的大小等于a ,
A B A
则v=a t=v -a t,x =a t2
A B B A A
x =v t-a t2,x -x =L
B B B B A
解得v =8 m/s,x =2.5 m
B B
A、B达到共同速度后,有v2=2a ′x ′
B B
解得x ′=0.5 m
B
所以s =x +x ′=3 m。
B B B
例4 (1)4 m/s2 1 m/s2 (2)1 s
解析 (1)假设释放后滑块会相对于薄平板向下滑动,对滑块,由牛顿第二定律有 mgsin 37°
-F =ma ,
f1 1
其中F =μF ,F =mgcos 37°
f1 1 N1 N1
解得a=gsin 37°-μgcos 37°=4 m/s2
1 1
对薄平板,由牛顿第二定律有
Mgsin 37°+F -F =Ma
f1 f2 2
其中F =μF ,F =(m+M)gcos 37°
f2 2 N2 N2
解得a=1 m/s2,a>a,假设成立,即滑块会相对于薄平板向下滑动。
2 1 2
(2)设滑块滑离薄平板经历的时间为t,由运动学公式,有x =at2,x =at2,又x -x =L,
1 1 2 2 1 2
解得t=1 s。
第 6 课时 实验四:探究加速度与物体受力、物体质量的
关系
例1 (1)BD (2)匀速直线 (3)远小于
(4)0.44 (5)小车 (6)AC (7)C
解析 (1)利用天平测量质量,利用打点计时器可以计时,打出的纸带需测量长度求加速度,
所以需要天平和刻度尺,A、C错误,B、D正确。
(2)补偿阻力时应使小车拖动纸带在木板上做匀速直线运动。
(3)为了使沙桶及沙的重力在数值上近似等于小车运动时受到的拉力,需要使沙桶及沙的总
质量远小于小车的总质量。(4)由某段时间中间时刻的瞬时速度等于该段时间运动过程的平均速度,可得
v == m/s
B
=0.44 m/s。
(5)探究加速度与力的关系时,需要保持小车的总质量不变。
(6)从题图丙可以看出,图像不过原点,即当F为某一值时,但加速度却为零,所以是未补
偿阻力或补偿阻力不足,故A正确,B错误;随着拉力F增大(即沙桶及沙的重力增大),已
经不满足沙桶及沙的总质量远小于小车总质量的条件,造成BC段弯曲,故C正确,D错误。
(7)在探究加速度与质量的关系时, 由于补偿了阻力,所以图像过原点,且分别对小车和沙
桶及沙受力分析,由牛顿第二定律可得 mg-F =ma,F =Ma,联立解得 mg=(M+m)a,
T T
整理得a=,因为保证了沙和沙桶的质量不变,所以由实验数据作出a- 图线,不会发生弯
曲,故选C。
例2 (1)AB (2)B (3)0.26 0.50 (4)
解析 (1)除题图中所给的实验器材外,还需选用的有刻度尺,用来测量纸带长度;打点计
时器本身就是计时仪器,则不需要秒表,也不需要干电池;根据2F-μmg=ma,可知要测
量动摩擦因数,需要天平测量物块质量,故选A、B。
(2)设物块的加速度为a,对物块有2F-μmg=ma,解得μ=,加速度可以由打点纸带求出,
为进一步测量动摩擦因数,则还需要测量物块的质量m,故选B。
(3)由题可知,T=5× s=0.1 s,打下计数点2时物块对应的速度大小
v= m/s
≈0.26 m/s,本次实验物块对应的加速度大小a==
m/s2
≈0.50 m/s2。
(4)由牛顿第二定律可得2F-μmg=ma,即a=F-μg,由题意可知b-μg=0,=k,解得μ
=。
例3 (1)0.19(0.18也可)
(2)甲 甲和乙
解析 (1)由题意知小车做匀加速直线运动,故v =,将x =(36.10-32.40) cm=3.70 cm,T
d ce
=0.1 s,代入得v≈0.19 m/s;
d
(2)甲实验方案中,绳的拉力F满足:
F=Ma,且mg-F=ma,
则F=,只有M≫m时,F才近似等于mg,故以托盘与砝码的重力表示小车的合外力,需
满足M≫m。
乙实验方案中:小车沿木板匀速下滑,小车受绳的拉力及其他力的合力为零,且绳的拉力大
小等于托盘与砝码的重力,取下托盘及砝码,小车所受的合外力大小等于托盘与砝码的重力mg,不需要满足M≫m。两个实验方案都可把mg作为F值。
例4 (1) (2)0.35
解析 (1)对铁块受力分析,由牛顿第二定律有mgsin θ-μmgcos θ=ma,解得μ=。
(2)两个相邻计数点之间的时间间隔
T=5× s=0.10 s,
由逐差法和Δx=aT2可得
a=
≈1.97 m/s2,
代入到μ=,解得μ≈0.35。
阶段复习(一) 力与直线运动
规范训练 (1)0.4 (2)3.75 m
(3) m
解析 (1)由运动学公式得v=at,
1 11
解得a=2 m/s2
1
对A由牛顿第二定律得F-μ mg=ma ,,解得μ =0.4。
A 1 A
(2)t =2.5 s时B运动的位移大小x =vt =2×2.5 m=5 m,t =2.5 s时A运动的位移大小x
2 B 02 2 A
=at2=×2×2.52 m=6.25 m
12
t=2.5 s时A、B间的距离x=L+x -x =5 m+5 m-6.25 m=3.75 m。
2 0 B A
(3)对木板由牛顿第二定律得
μ mg-μ(m+m+M)g=Ma
A 2
解得a=1 m/s2
2
设经过t′物块B滑到木板的右端时A、B恰好相碰,则at′2=L+vt′
1 0 0
A到达木板右端,可得at′2=L+at′2,联立解得L= m。
1 2
第四章 抛体运动 圆周运动
第 1 课时 曲线运动运动的合成与分解
例1 D [小车做曲线运动,所受合力指向曲线的凹侧,故A、B错误;小车沿轨道从左向
右运动,动能一直增加,故合力方向与运动方向的夹角始终为锐角,C错误,D正确。]例2 C [运动员同时参与了两个分运动,竖直方向向下落的运动和水平方向随风飘的运动,
两个分运动同时发生,相互独立,水平方向的风力大小不影响竖直方向的运动,即落地时间
和着地时竖直方向的速度不变,故A、B错误,C正确;水平风力越大,水平方向的速度越
大,则落地时的合速度越大,故D错误。]
例3 D [在0~t 时间内,无人机在水平方向做初速度为零的匀加速直线运动,在竖直方
1
向也做初速度为零的匀加速直线运动,则合运动为匀加速直线运动,选项 A错误;在0~t
4
时间内,无人机竖直方向速度一直为正,即一直向上运动,则在 t 时刻,无人机还没有运动
2
到最高点,选项B错误;在t ~t 时间内,无人机水平方向做速度为v 的匀速直线运动,竖
3 4 0
直方向做匀减速直线运动,则合运动为匀变速曲线运动,选项C错误;在t 时刻,无人机的
2
水平速度为v、竖直速度为v,则合速度大小为,选项D正确。]
0 2
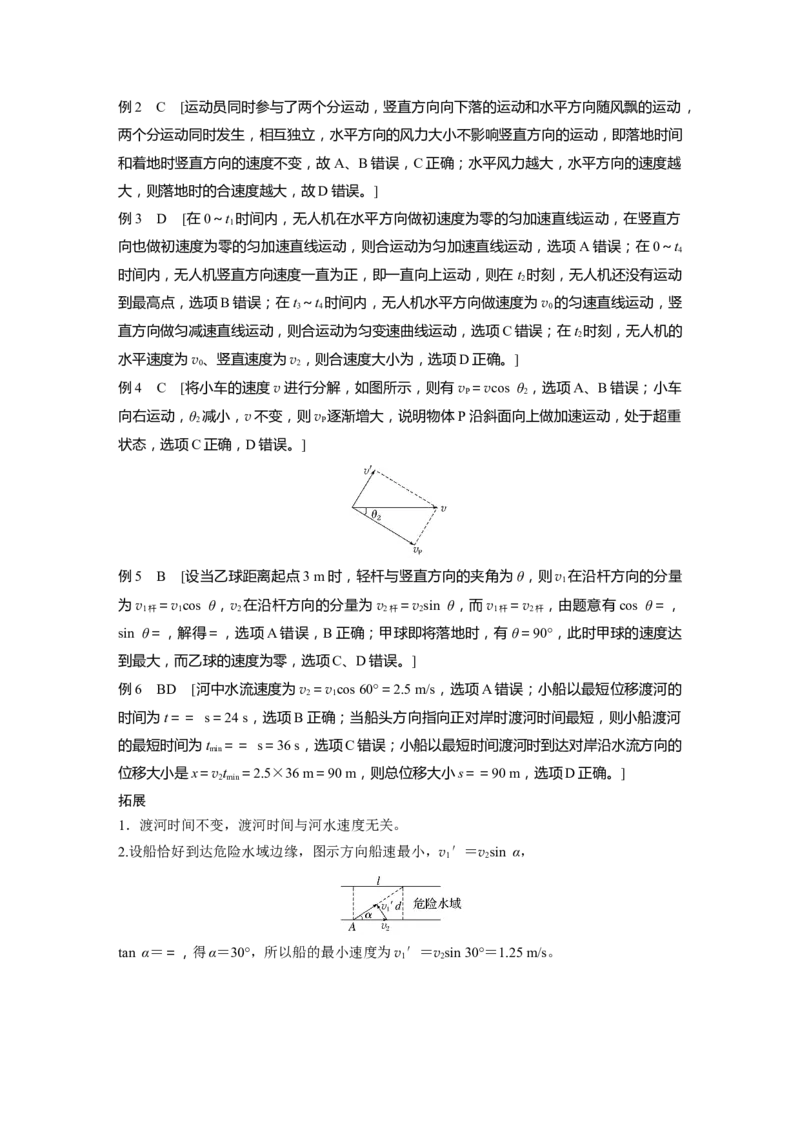
例4 C [将小车的速度v进行分解,如图所示,则有v =vcos θ ,选项A、B错误;小车
P 2
向右运动,θ 减小,v不变,则v 逐渐增大,说明物体P沿斜面向上做加速运动,处于超重
2 P
状态,选项C正确,D错误。]
例5 B [设当乙球距离起点3 m时,轻杆与竖直方向的夹角为θ,则v 在沿杆方向的分量
1
为v =vcos θ,v 在沿杆方向的分量为v =vsin θ,而v =v ,由题意有cos θ=,
1杆 1 2 2杆 2 1杆 2杆
sin θ=,解得=,选项A错误,B正确;甲球即将落地时,有θ=90°,此时甲球的速度达
到最大,而乙球的速度为零,选项C、D错误。]
例6 BD [河中水流速度为v =vcos 60°=2.5 m/s,选项A错误;小船以最短位移渡河的
2 1
时间为t== s=24 s,选项B正确;当船头方向指向正对岸时渡河时间最短,则小船渡河
的最短时间为t == s=36 s,选项C错误;小船以最短时间渡河时到达对岸沿水流方向的
min
位移大小是x=vt =2.5×36 m=90 m,则总位移大小s==90 m,选项D正确。]
2min
拓展
1.渡河时间不变,渡河时间与河水速度无关。
2.设船恰好到达危险水域边缘,图示方向船速最小,v′=vsin α,
1 2
tan α==,得α=30°,所以船的最小速度为v′=vsin 30°=1.25 m/s。
1 2第 2 课时 抛体运动
例1 B [摩托车从a点做平抛运动到c点,水平方向:h=vt ,竖直方向:h=gt2,可解
11 1
得v =,动能E =mv2=;摩托车从a点做平抛运动到b点,水平方向:3h=vt ,竖直方
1 1 1 22
向:0.5h=gt2,解得v=3,动能E=mv2=mgh,故=18,B正确。]
2 2 2 2
例2 AD [所有小面圈在空中均做平抛运动,竖直方向均为自由落体运动,根据 h=gt2得t
=,可知所有小面圈在空中运动的时间都相同,A正确;所有小面圈都只受到重力作用,所
以加速度均为g,根据Δv=gt可知所有小面圈在空中运动过程中速度的变化量相同,B错误;
若小面圈刚被抛出时初速度为v,根据水平方向为匀速直线运动,落在锅里的水平距离最小
0
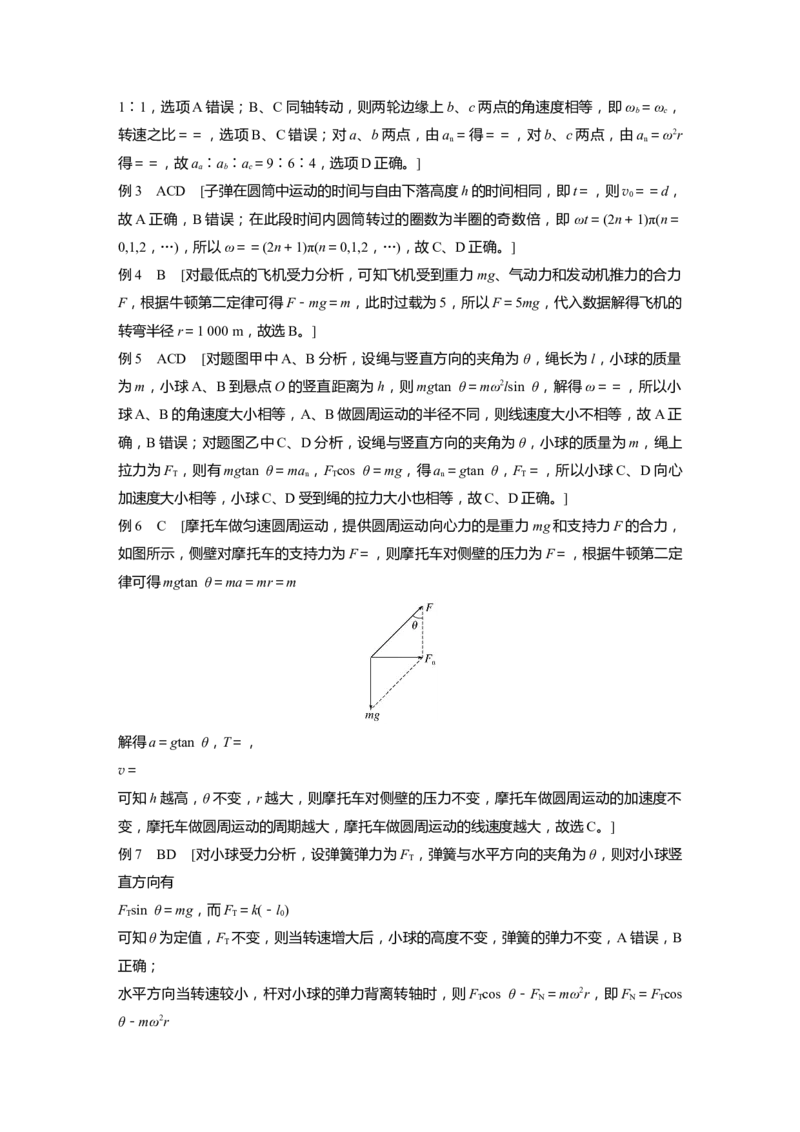
值为L,最大值为3L,有L=v t,3L=v t,t=,则Lω,根据牛顿第三定律可知,小球对杆的压力不一定变大,C错误;
根据F =mω2r可知,因角速度变大,则小球所受合外力变大,D正确。]
合
第 5 课时 专题强化:圆周运动的临界问题
例1 D [汽车过该弯道时受到重力、牵引力、支持力和摩擦力作用,摩擦力提供做圆周运
动的向心力,故A错误;汽车过该弯道时所受径向静摩擦力大小为 F=m=7 500 N,故B
f
错误;汽车过该弯道时的向心加速度大小为a== m/s2,故C错误;汽车能安全通过该弯道
速度最大时满足mg=m,解得v =15 m/s,故D正确。]
m
例2 AC [小木块a、b做圆周运动时,由静摩擦力提供向心力,即F=mω2R。当角速度
f
增大时,静摩擦力增大,当增大到最大静摩擦力时,发生相对滑动,对木块 a有F =
fa
mω2l,当F =kmg时,kmg=mω2l,ω=;对木块b有F =mω2·2l,当F =kmg时,kmg
a fa a a fb b fb
=mω2·2l,ω =,则ω=是b开始滑动的临界角速度,即b比a先开始滑动,选项A、C正
b b
确;两木块滑动前转动的角速度相同,则F =mω2l,F =mω2·2l,F 时,b绳出现弹力,故B正确;根据竖直方向上受力平
衡得Fsin θ=mg
a
解得F=,可知a绳的弹力不变,故A错误,C正确;
a
由于b绳可能没有弹力,故b绳突然被剪断时,a绳的弹力可能不变,故D错误。]
例4 ABC [设小球通过最高点时的最小速度为v ,则根据牛顿第二定律有mg=m,解得
0
v =2 m/s,故A正确;当小球在最高点的速度为v =4 m/s时,设轻绳拉力大小为F ,根据
0 1 T
牛顿第二定律有F +mg=m,解得F =15 N,故B正确;小球在轨迹最低点处速度最大,
T T
此时轻绳的拉力最大,根据牛顿第二定律有F -mg=m,解得v =4 m/s,故C正确,D错
Tm m
误。]
例5 B [对A球,合外力提供向心力,设管对A的支持力为F ,由牛顿第二定律有F -
A A
m g=m ,代入数据解得F =28 N,由牛顿第三定律可得,A球对管的力竖直向下,为28
A A AN,设B球对管的力为F ′,由管的受力平衡可得F ′+28 N+m g=0,解得F ′=-44
B B 管 B
N,负号表示和重力方向相反,由牛顿第三定律可得,管对B球的力F 为44 N,方向竖直
B
向下,对B球由牛顿第二定律有F +m g=m ,解得v =4 m/s,故选B。]
B B B B
例6 A [经分析,当物体运动到最低点时,摩擦力达到最大值,角速度达到最大值,根据
牛顿第二定律得
μmgcos 37°-mgsin 37°=mrω 2
m
在最高点,根据牛顿第二定律得F+mgsin 37°=mrω 2,联立以上两式并代入数据得F=-
f m f
5.6 N
负号表示摩擦力的方向沿盘面向上,大小为5.6 N,故选A。]
第 6 课时 实验六:探究向心力大小与半径、角速度、质量
的关系
例1 (1)A (2)角速度平方 不变
解析 (1)本实验先控制住其他几个因素不变,集中研究其中一个因素变化所产生的影响,
采用的实验方法是控制变量法,故选A。
(2)标尺上露出的红白相间的等分格数之比为两个小球所需向心力的比值,根据 F=mrω2可
知比值等于两小球的角速度平方之比,逐渐加大手柄的转速的过程中,该比值不变,故左右
标尺露出的格数之比不变。
例2 (1) (2) mr
解析 (1)挡光杆通过光电门时的线速度大小为v=,
由ω=,解得ω=
(2)根据向心力公式有F=mω2r,
将ω=代入上式解得F=mr,可以看出,以F为纵坐标,以为横坐标,可在坐标纸中描出数
据点作一条直线,该直线的斜率为k=mr。
例3 (1) (2)
解析 (1)小球通过最低点时的线速度v=,由v=ωL,可得角速度ω=。
(2)在最低点对小球受力分析可得F-mg=mω2L,把ω=代入,可得F=mg+·,可得=k,
mg=b,解得m=,g=。
例4 (1)否 (2)2∶2∶1 (3)1∶2∶2
解析 (1)物块的形状和大小相同,做圆周运动的半径相同,所以物块没有看作质点对实验
没有影响。(2)当物块随转盘缓慢加速过程中,物块所需的向心力先由静摩擦力提供,当达到最大静摩
擦力后由绳子的拉力和最大静摩擦力提供,即 F =F+μmg=mrω2,所以有F=mrω2-
向
μmg,题图乙中图线的斜率为mr,与纵轴的截距为-μmg,根据题图乙知a的斜率k=mr=
a a
1 kg·m,b的斜率k =mr=1 kg·m,c的斜率k=mr= kg·m,所以a、b、c的质量之比为
b b c c
2∶2∶1,因为体积相同,所以物块a、b、c的密度之比为2∶2∶1。
(3)由题图乙知a的纵截距-μmg=-1 N,b的纵截距-μmg=-2 N,c的纵截距-μmg
a a b b c c
=-1 N,结合质量之比得到物块a、b、c与转盘之间的动摩擦因数之比为1∶2∶2。
第五章 万有引力与宇宙航行
第 1 课时 万有引力定律及应用
例1 B [已知由M到N过程中,太阳的引力对小行星做正功,说明小行星靠近太阳运动,
所以太阳位于焦点F 处,A错误;根据开普勒行星运动定律可知小行星由M到P的过程中
2
速度逐渐增大,小行星由M到N和由N到P的过程中,通过的路程相等,所以小行星由M
到N运动时间大于由N到P的运动时间,由开普勒第二定律可知S>S ,B正确;由动能定
1 2
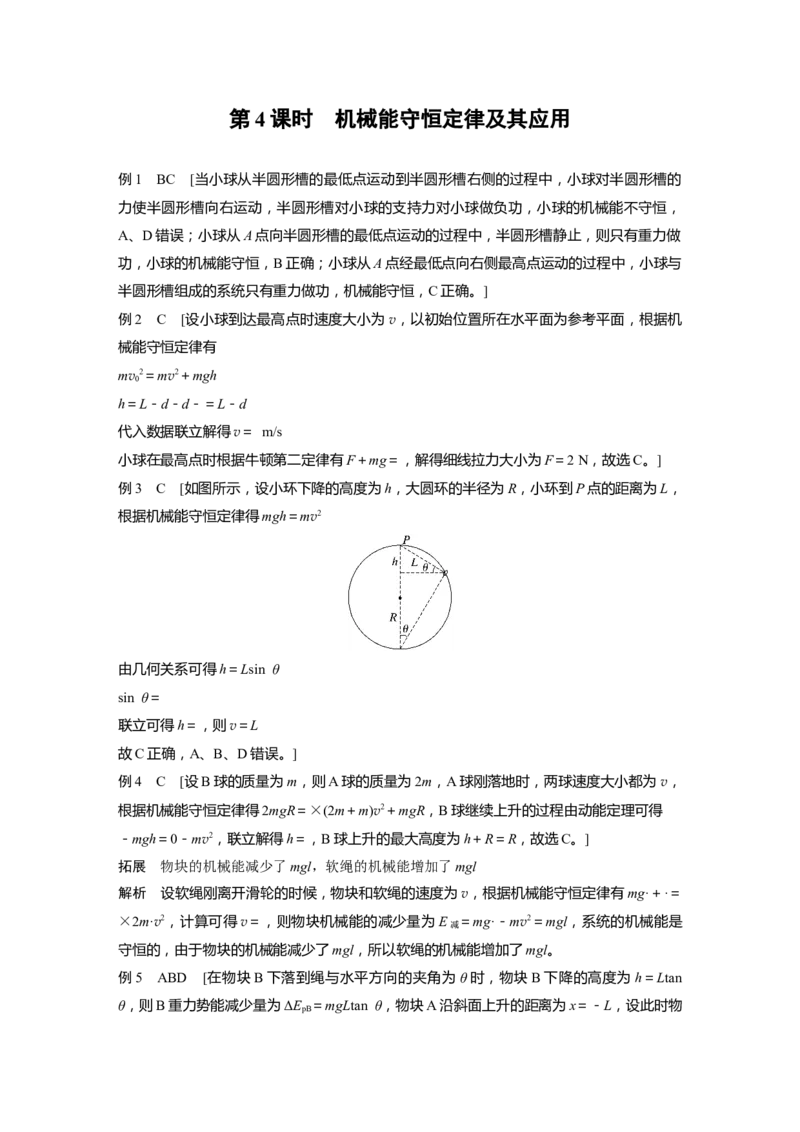
理,由M到N过程中,万有引力做正功,则动能增大,即E g ,故D错误。]
地 火 地 火
例6 (1) (2)
解析 (1)由题意可知该星球表面重力加速度为g=,由万有引力定律知mg=m,解得v =
1
=。
(2)由星球表面万有引力等于物体重力知=mg,又星球表面E =-G,可得E =-,由机械
p p
能守恒定律有mv2-=0,
2
解得v=。
2
例7 B [火星和地球均绕太阳运动,由于火星与地球的轨道半径之比约为3∶2,根据开普
勒第三定律有=,可得==,故 A错误;火星和地球绕太阳做匀速圆周运动,速度大小均不变,当火星与地球相距最远时,由于两者的速度方向相反,故此时两者相对速度最大,故
B正确;在星球表面根据万有引力定律有G=mg,由于不知道火星和地球的质量比以及火
星和地球的半径比,故无法得出火星和地球表面的自由落体加速度大小之比,故C错误;
火星和地球绕太阳做匀速圆周运动,有ω =,ω =,要发生下一次“火星冲日”,则有
火 地
(-)t=2π,得t=>T ,可知下一次“火星冲日”将出现在2023年12月8日之后,故D错
地
误。]
第 3 课时 专题强化:卫星变轨问题 双星模型
例1 B [卫星在轨道Ⅲ上运行时,根据万有引力提供向心力得G=ma=m,在地球表面附
近由mg=G得GM=gR2,所以卫星在轨道Ⅲ上的加速度大小为a=()2g,线速度大小为v
=,故A错误,B正确;卫星的线速度大小为v=,卫星在圆轨道上运行的动能为E =mv2
k
=,可知卫星在轨道Ⅲ上的动能小于在轨道Ⅰ上的动能,故C错误;卫星从轨道Ⅰ进入椭
圆轨道Ⅱ要点火加速,机械能增大,从椭圆轨道Ⅱ进入轨道Ⅲ要再次点火加速,机械能继续
增大,所以卫星在轨道Ⅲ上的机械能大于在轨道Ⅰ上的机械能,故D错误。]
例2 D [根据卫星变轨时,由低轨道进入高轨道需要点火加速,反之要减速,所以飞船先
到空间站下方的圆周轨道上同方向运动,在合适的位置加速靠近即可,或者飞船先到空间站
轨道上方圆周轨道上同方向运动,在合适的位置减速即可,故选D。]
例3 B [设P、Q之间的距离为L,P做圆周运动的轨道半径为r ,Q做圆周运动的轨道半
1
径为r ,角速度为ω,则有G=m ω2r ,G=m ω2r ,联立可得==,由于r>r ,则k<1,故
2 P 1 Q 2 1 2
A错误;根据线速度与角速度之间的关系有 v =ωr ,v =ωr ,r +r =L,则v +v =ω(r
P 1 Q 2 1 2 P Q 1
+r)=ωL,可知,若P、Q的角速度和它们之间的距离一定,则P、Q做圆周运动的线速度
2
大小之和一定,故B正确;根据G=m ,
P
可得v ==,故C错误;根据G=m r ,G=m r ,可得T=2π,若仅增大P、Q之间的距离,
P P 1 Q 2
则P、Q运行的周期将变大,故D错误。]
例4 D [第一种形式下,星体A受到星体B和星体C对其的万有引力,它们的合力充当向
心力,则G+G=mR,解得T =4πR,第二种形式下,星体之间的距离为r,那么圆周运动
1
的半径为R′=,星体A所受合力F =2G·cos 30°,根据合力提供向心力有2G·cos 30°=
合
m·,解得T=2πr,则T∶T=,故选D。]
2 1 2
例5 C [毫秒脉冲星稳定自转,万有引力提供向心力,则有G≥mr,又知M=ρ·πr3,
整理得密度ρ≥= kg/m3≈5.2×1015 kg/m3,故选C。]
例6 D [地球的第一宇宙速度为v =,则黑洞的第一宇宙速度为v =,并且有v>c,联立
1 2 2
解得r<,所以D正确,A、B、C错误。]阶段复习(二) 力与曲线运动
规范训练 (1)30 N,方向向下
(2)6.85 m (3)H=R+R(cos θ+) 4 m
解析 (1)设滑块经过C点的速度为v ,由动能定理可得mgh -μmgL=mv 2
C 1 C
设滑块在C点所受的支持力为F ,
N
由牛顿第二定律得F -mg=m
N
代入数据得F =30 N
N
由牛顿第三定律可知,滑块经过C点时对轨道压力大小为30 N,方向向下。
(2)滑块从D到E做斜抛运动,设滑块在D点速度为v ,从D至最高点时间为t,则有水平
D
方向(v cos θ)t=Rsin θ,竖直方向v sin θ=gt
D 1 1 D 1
联立解得v ==5.0 m/s
D
滑块自释放运动到D点的过程中,由动能定理可得mgh -μmgL-
2
mgR(1+cos θ)=mv 2-0
1 D
代入数据得h=6.85 m。
2
(3)设滑块离开D点后上升的最大高度为h′,离地最大高度为H,则h′=,又因为v =,
D
解得h′=
因为H=R(1+cos θ)+h′,则滑块在DE间运动时离地面高度H与夹角θ的函数关系式H
=R+R(cos θ+),当θ=0时,H有最小值,即H =2R=4 m。
min
第六章 机械能守恒定律
第 1 课时 功、功率 机车启动问题
例1 B [由于磁铁做匀速运动,磁铁所受合外力为零,合外力对磁铁不做功,故A错误;
磁铁受重力和AB对它的作用力而做匀速运动,根据平衡条件可知,AB对磁铁的作用力大
小等于重力大小,方向竖直向上,与磁铁的运动方向相互垂直,故AB对磁铁的作用力不做
功,故B正确;AB对磁铁的弹力垂直接触面,与磁铁的运动方向不垂直,故弹力一定做功,
故C错误;AB对磁铁的摩擦力沿接触面,与磁铁运动方向不垂直,故摩擦力一定做功,故
D错误。]
例2 (1)300 J (2)100 J (3)-400 J
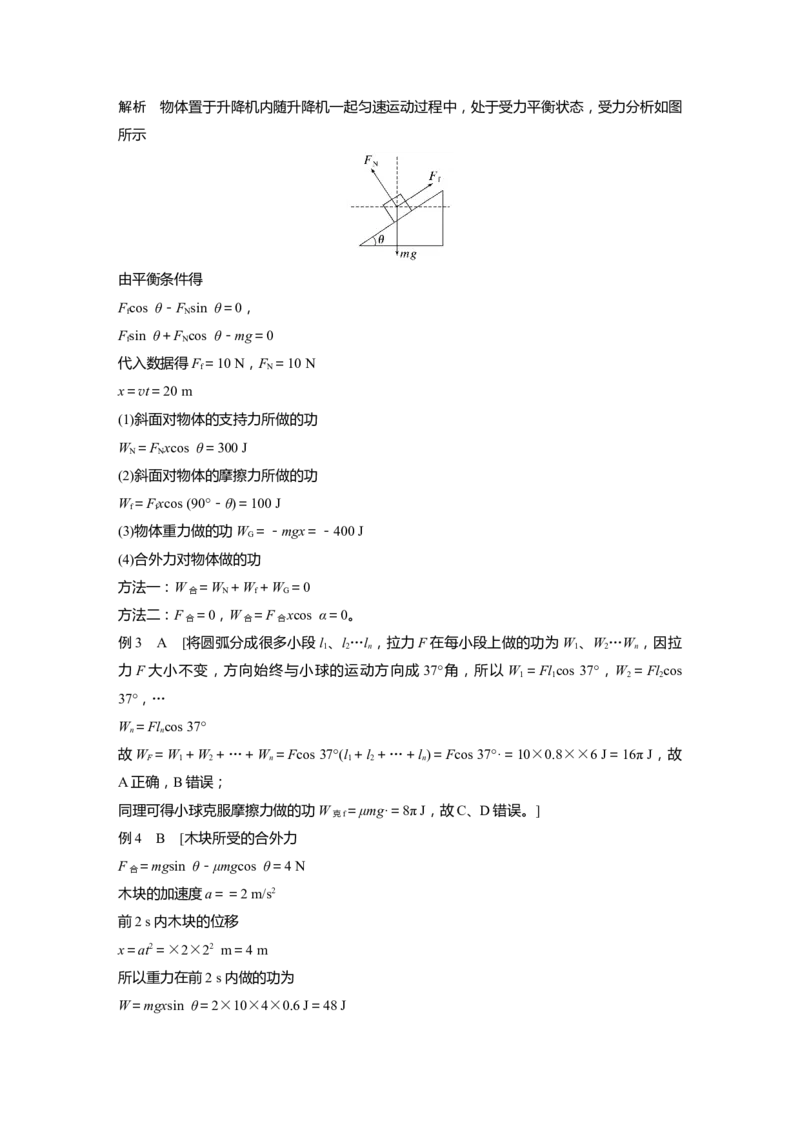
(4)0解析 物体置于升降机内随升降机一起匀速运动过程中,处于受力平衡状态,受力分析如图
所示
由平衡条件得
Fcos θ-F sin θ=0,
f N
Fsin θ+F cos θ-mg=0
f N
代入数据得F=10 N,F =10 N
f N
x=vt=20 m
(1)斜面对物体的支持力所做的功
W =F xcos θ=300 J
N N
(2)斜面对物体的摩擦力所做的功
W=Fxcos (90°-θ)=100 J
f f
(3)物体重力做的功W =-mgx=-400 J
G
(4)合外力对物体做的功
方法一:W =W +W+W =0
合 N f G
方法二:F =0,W =F xcos α=0。
合 合 合
例3 A [将圆弧分成很多小段l 、l…l ,拉力F在每小段上做的功为W 、W…W ,因拉
1 2 n 1 2 n
力F大小不变,方向始终与小球的运动方向成 37°角,所以W =Flcos 37°,W =Flcos
1 1 2 2
37°,…
W=Flcos 37°
n n
故W =W +W +…+W =Fcos 37°(l +l +…+l)=Fcos 37°·=10×0.8××6 J=16π J,故
F 1 2 n 1 2 n
A正确,B错误;
同理可得小球克服摩擦力做的功W =μmg·=8π J,故C、D错误。]
克f
例4 B [木块所受的合外力
F =mgsin θ-μmgcos θ=4 N
合
木块的加速度a==2 m/s2
前2 s内木块的位移
x=at2=×2×22 m=4 m
所以重力在前2 s内做的功为
W=mgxsin θ=2×10×4×0.6 J=48 J重力在前2 s内的平均功率==24 W,木块在2 s末的速度v=at=2×2 m/s=4 m/s
2 s末重力的瞬时功率
P=mgvsin θ=2×10×4×0.6 W=48 W,故选项B正确。]
例5 B [由题知,水筒在筒车上均匀排布,单位长度上有n个,且每个水筒离开水面时装
有质量为m的水,其中的60%被输送到高出水面H处灌入稻田,则水轮转一圈灌入农田的
水的总质量为m =2πRnm×60%=1.2πRnm,则水轮转一圈灌入稻田的水克服重力做的功W
总
=1.2πRnmgH,则筒车对灌入稻田的水做功的功率为P=,t=,联立解得P=,故选B。]
例6 B [在以额定功率运动过程中,气垫船的牵引力逐渐减小,当时速达到最大时,牵引
力等于阻力不变,A错误;由P =Fv ,可得F=3.0×105 N,当气垫船以不同的速度做
额 f m f
匀速航行时,牵引力等于阻力,B正确,C错误;根据P=,解得P=4 500 kW,D错误。]
例7 (1)60 kW (2)6 000 N 1.5×105 J (3)1 400 m
解析 (1)汽车受到的阻力为F=0.1mg=2 000 N
f
当牵引力等于阻力时,汽车速度达到最大,则汽车的额定功率为P=F v =Fv =60 000 W
牵 m f m
=60 kW
(2)从0~5 s时间内,汽车做匀加速直线运动,加速度大小为a== m/s2=2 m/s2,汽车匀加
速直线运动的位移为x=at2=25 m
1 1
根据牛顿第二定律可得F-F=ma,可得F=6 000 N
f
在0~t 期间牵引力做的功为W=Fx=1.5×105 J
1 1
(3)在t~t 期间,由动能定理得
1 2
P(t-t)-Fx=mv 2-mv2
2 1 f 2 m 1
解得x=1 400 m。
2
第 2 课时 动能定理及其应用
例1 A [小球下落的高度为h=πR-R+R=R,小球下落过程中,根据动能定理有mgh=
mv2,综上有v=,故选A。]
例2 BC [物体从斜面底端回到斜面底端根据动能定理有-μmg·2lcos α=-E ,物体从斜
k
面底端到最高点根据动能定理有-mglsin α-μmglcos α=0-E ,整理得l=,μ=0.5,A错
k
误,C正确;
物体向下滑动时根据牛顿第二定律有
ma =mgsin α-μmgcos α,
下
解得a =,B正确;
下
物体向上滑动时根据牛顿第二定律有ma =mgsin α+μmgcos α,解得a =g,故a >a ,由于上滑过程中的末速度为零,下滑
上 上 上 下
过程中的初速度为零,且走过相同的位移,根据位移公式l=at2,则可得出t Δx,
2 2 1
所以小物块在传送带上留下的痕迹长度为1 m。
小物块与传送带间因摩擦而产生的热量为Q=F(Δx+Δx)=7.5 J,故C正确,D错误。]
f 1 2
例2 (1)3 s (2)1.5 m (3)9 J
解析 (1)设小物块从圆弧最高点由静止下滑到达最低点时速度为v ,根据动能定理有mgR
N=mv 2
N
解得v =9 m/s,v >v,可知小物块滑上传送带后先做匀减速运动
N N
由牛顿第二定律μmg=ma
1
解得a=1.5 m/s2
1
若经过t 减速到v=6 m/s,由v=v -at,代入数据求得t=2 s
1 N 11 1
在t 内小物块的位移x=t
1 1
解得x=15 m,由xF
fmax2 f2 fmax2
所以当滑块在B上滑动时,B、C一起做匀加速直线运动,而滑块做匀减速直线运动,根据
牛顿第二定律可知,当滑块在B上滑动时,滑块和B、C整体的加速度大小分别为a ==2
1
m/s2,
a==0.25 m/s2
2
若滑块恰好在滑到C上时与C达到共同速度,因为滑块与C之间的最大静摩擦力为F =
f3
3μMg=7.5 N
大于滑块与C整体做匀减速直线运动时C所受地面的摩擦力F ′=μ(M+m)g=3.5 N,所以
f3
滑块与C达到共同速度后将不会再相对C滑动,B、C一起做匀减速直线运动直到停止,则
可获得一等奖,且v 具有最小值。设滑块刚滑上B时的速度大小为v,经时间t 恰好滑到C
0 1 1
上且与C达到大小为v 的共同速度,根据匀变速直线运动的规律有v -at =v ,v =at ,
2 1 11 2 2 21
-=L,解得v = m/s,对滑块从刚滑上A到刚滑上B的过程,根据动能定理有-μMgL=
1
Mv2-Mv 2,解得v = m/s。
1 0min 0min
例5 (1)(1.2 m,0.45 m) (2)5 m (3)x ≥5 m或x ≤1.25 m
AB AB
(4)见解析
解析 (1)对滑块由P到A的运动,根据平抛规律有v=vtan θ=3 m/s,平抛运动的竖直方
y 0
向有v2=2gy,解得y=0.45 m,运动时间t==0.3 s,则x=vt=1.2 m,即弹出时位置的坐
y 0
标值为(1.2 m,0.45 m)。
(2)滑块恰好能通过D点,在最高点有mg=m,从P到D点,由动能定理得mg(y+x sin θ-
AB
2R)-μmgx cos θ-μmgx =mv2-mv2,联立解得x =5 m。
AB BC 1 0 AB
(3)滑块刚好不脱离轨道,有两种临界情况,一是刚好在圆轨道最高点压力为零时,二是刚
好到达与圆轨道圆心等高的地方。由(2)知,滑块刚好能够到达圆轨道最高点时x =5 m
AB
滑块刚好到达与圆轨道圆心等高的地方时,从 P到与圆心等高的位置,由动能定理得mg(y
+x sin θ-R)-μmgx cos θ-μmgx =0-mv2,解得x =1.25 m,滑块从A点切入后不脱
AB AB BC 0 AB离轨道时AB的长度应满足x ≥5 m或x ≤1.25 m
AB AB
(4)由(3)知,x =3.5 m时,滑块在圆轨道发生脱轨,设脱轨地点和圆心的连线与水平方向的
AB
夹角为α,则脱轨时mgsin α=,从P到脱轨的位置,由动能定理得mg(y+x sin θ-R-
AB
Rsin α)-μmgx cos θ-μmgx =mv2-mv2
AB BC 2 0
联立解得sin α=0.6,即滑块在圆心以上Rsin α=0.6 m处脱轨。
第 7 课时 实验七:验证机械能守恒定律
例1 (1)D (2)B (3)mg(s+s)
0 1
重锤下落过程中受到阻力作用
解析 (1)打点计时器需要用交流电源,测量速度及重力势能的变化量需要测量纸带上某些
点间的距离,则需要刻度尺,故选D。
(2)按照题图所示安装好实验器材并连接好电源,故A正确,不符合题意;
为充分利用纸带,应先接通电源开关,再打开夹子释放纸带,故B错误,符合题意;测量
纸带上某些点间的距离,用来表示重力势能的变化,故C正确,不符合题意;根据测量的
结果计算重锤下落过程中减少的重力势能是否等于其增加的动能,验证机械能是否守恒,故
D正确,不符合题意。
(3)重力势能减少量为ΔE=mg(s+s),C点速度为v =
p 0 1 C
动能增加量为ΔE =mv 2-0=m()2=。重锤减小的重力势能总是大于重锤增加的动能,其原
k C
因主要是重锤下落过程中受到阻力作用。
例2 (1)B D (2) mgh (3)重物受到空气阻力和纸带受到摩擦阻力的影响 较大
B
(4)9.70
解析 (1)除了题目中提出的器材,还需要毫米刻度尺测长度,打点计时器需要交流电源。
所以选B、D。
(2)重物在B点的瞬时速度为v =,根据题图可知,从起始点下落的高度为h ,从打O点到
B B
打B点的过程中,重物的重力势能减少量为ΔE=mgh ,动能的增加量为ΔE=mv 2=;
p B k B
(3)重力势能的减少量略大于动能的增加量,其原因可能是重物受到空气阻力和纸带受到摩
擦阻力的影响;为了减小实验误差,在两个体积相同、质量不同的重物中应选择质量较大的,
空气阻力影响结果较小;
(4)若重物下落机械能守恒,则有mgh=mv2,即v2=2gh,可知v2-h图线是一条过原点的直
线,直线的斜率为k=2g,题图丙所示的v2-h图线的斜率为k=m/s2=2g,因此可求得当地
重力加速度大小为g=9.70 m/s2。
例3 (1) (2) mgl (m+m)()2
1 1 2
(3)解析 (1)小车通过光电门时的速度为v=
(2)从释放到小车经过光电门,这一过程中,系统重力势能减少量为 ΔE =mgl,从释放到小
p 1
车经过光电门,这一过程中,系统动能增加量为ΔE=(m+m)()2
k 1 2
(3)改变l,做多组实验,作出以l为横坐标,以()2为纵坐标的图像。若机械能守恒成立,有
mgl=(m+m)()2,整理有()2=·l,则图像斜率为。
1 1 2
例4 (1)-2 (2)-2.1 0.59 (3)C
解析 (1)设初始位置时,轻绳与竖直方向的夹角为 θ,则轻绳拉力最小值为T =mgcos
min
θ,到最低点时轻绳拉力最大,则有mgl(1-cos θ)=mv2,T -mg=m,
max
联立可得T =3mg-2T
max min
即若小钢球摆动过程中机械能守恒,则题图乙中直线斜率的理论值为-2;
(2)由题图乙得直线的斜率为k==-2.1,3mg=1.77 N,则小钢球的重力为mg=0.59 N。
(3)该实验系统误差的主要来源是小钢球摆动过程中有空气阻力,使得机械能减小,故选
C。
第七章 动量守恒定律
第 1 课时 动量定理及应用
例1 C [设斜面倾角为θ时,物块在斜面上的加速度为a=gsin θ,设斜面顶点到水平地面
的高度为h,则物块在斜面上滑行的时间为t==,因为∠ABC<∠ACB,可得物块在AB斜面
上的滑行时间比在AC斜面上的滑行时间长,根据I=mgt可知,两物块所受重力冲量不相同,
选项A错误;根据动量定理有mgsin θ·t=Δp,可知Δp=mg,动量改变量是矢量,两物块
的动量改变量大小相等,但方向不相同,选项B错误;根据动能定理ΔE =mgh得两物块的
k
动能改变量相同,选项C正确;物块到达斜面底端时重力的瞬时功率P=mgvsin θ,因两物
块所处斜面倾角不相同,则重力的瞬时功率不相同,选项D错误。]
例2 C [以沿斜面向下为正方向,根据动量定理有I =Δp=0.5mv -(-mv)=1.5mv ,A
合 0 0 0
错误;设物体上滑过程时间为t,下滑回到出发点时间为t,位移大小为x,则x=t=t,得
1 2 1 2
t =t ,整个过程中摩擦力冲量的矢量和为I +I =Ft -Ft≠0,B错误;上滑过程中重力
1 2 f1 f2 f1 f2
的冲量为mgt ,下滑过程中重力的冲量为mgt ,由于tv 不合理,
B1 A2 B2 A2 B2
选项B错误;若v =3.5 m/s,v =4.5 m/s,碰后总动量p′=mv +mv =8m,总动能E
A3 B3 A3 B3 k3
=mv 2+mv 2=16.25m,动量守恒,机械能不增加,选项C可能实现;若v =
A3 B3 A4
-1 m/s,v =9 m/s,碰后总动量p′=mv +mv =8m,总动能E =mv 2+mv 2=41m,
B4 A4 B4 k4 A4 B4
动量守恒,但机械能增加,违反能量守恒定律,选项D错误。]
例2 B [设小球P、Q的质量分别为m、2m,落地前的瞬间二者速度均为v,由动能定理可得3mgh=×3mv2,解得v=,Q与地面碰撞后速度等大反向,然后与P碰撞,P、Q碰撞
过程满足动量守恒、机械能守恒,规定向上为正方向,则有2mv-mv=mv +2mv ,×3mv2
P Q
=mv 2+×2mv 2,解得v =,碰后小球P机械能守恒,则有mgh′=mv 2,解得h′=h,
P Q P P
故选B。]
例3 (1)1 m (2)0 (3)12 J
解析 (1)对物体A,根据运动学公式可得x=h-gt2=1.2 m-×10×0.22 m=1 m
(2)设B物体从地面竖直上抛的初速度为v ,根据运动学公式可知x=v t-gt2,解得v =6
B0 B0 B0
m/s
可得碰撞前A物体的速度
v =gt=2 m/s,方向竖直向下
A
碰撞前B物体的速度
v =v -gt=4 m/s,方向竖直向上
B B0
选向下为正方向,由动量守恒定律可得m v -m v =(m +m )v
A A B B A B
解得碰后速度v=0
(3)根据能量守恒定律可知碰撞损失的机械能ΔE=m v 2+m v 2-(m +m )v2=12 J。
A A B B A B
例4 A [根据题意可知,当弹簧压缩到最短时,两物体速度相同,所以此时乙物体的速度
大小也是1 m/s,A正确;因为弹簧压缩到最短时,甲受力向左,甲继续减速,B错误;根
据动量守恒定律可得mv =(m +m)v,解得m∶m =1∶3,C错误;当弹簧恢复原长时,
1 0 1 2 1 2
根据动量守恒定律和机械能守恒定律有mv =mv′+mv′,mv2=mv′2+mv′2,联
1 0 1 1 2 2 1 0 1 1 2 2
立解得v′=2 m/s,D错误。]
2
例5 (1)mv2 (2)mv2
0 0
解析 (1)从A压缩弹簧到A与B具有相同速度v 时,对A、B与弹簧组成的系统,取水平
1
向右为正方向,由动量守恒定律得 mv=2mv①
0 1
此时B与C发生完全非弹性碰撞,设碰撞后的瞬时速度为v ,损失的机械能为ΔE,对B、
2
C组成的系统,由动量守恒定律和能量守恒定律得
mv=2mv②
1 2
mv2=ΔE+(2m)v2③
1 2
联立①②③式得ΔE=mv2④
0
(2)由②式可知v10 cm,所以能射穿木块。
拓展 (1)CD (2)D
解析 (1)子弹的入射速度越大,子弹击穿木块所用的时间越短,木块相对地面的位移越小,
但子弹相对木块的位移不变,C、D正确;木块动能的增加量ΔE =Fx,木块对子弹的阻力
k f
恒定,由上述分析可知木块动能的增加量变小,即木块最终获得的动能变小,子弹损失的动
能也变小,A、B错误。
(2)若木块固定,子弹在木块中运动的时间t不为零,摩擦力F 不为零,则子弹对木块的摩擦
f
力的冲量I=Ft不为零,A错误;若木块不固定,子弹减小的动能等于木块增加的动能与系
f
统增加的内能之和,可知子弹减小的动能大于木块增加的动能,B错误;木块固定时子弹射
出木块所用时间较短,木块不固定时子弹射出木块所用时间较长,摩擦力大小不变,则木块
不固定时木块对子弹的摩擦力的冲量大小大于木块固定时木块对子弹的摩擦力的冲量大小,
C错误;不论木块是否固定,因摩擦产生的热量等于摩擦力与木块长度的乘积,摩擦力与木
块长度都不变,因此两种情况下子弹与木块间因摩擦产生的热量相等,D正确。
例2 (1)0.8 m/s (2)0.24 s
(3)0.096 m (4)0.336 m (5)0.24 J
(6)5 m/s
解析 (1)设物块与小车的共同速度为v,以水平向右为正方向,根据动量守恒定律有mv=
2 0
(m+m)v,
1 2
解得v==0.8 m/s
(2)对物块由动量定理有
-μm gt=mv-mv
2 2 2 0
解得t==0.24 s
(3)对小车,根据动能定理有μm gx=mv2-0,解得x==0.096 m
2 1 1 1
(4)x=t=×0.24 m=0.336 m
2
(5)方法一 Δx=x-x=0.24 m
2 1
Q=μm g·Δx=0.24 J
2
方法二 Q=ΔE=mv2-(m+m)v2=0.24 J
2 0 1 2
(6)mv′=(m+m)v′
2 0 1 2
mv′2-(m+m)v′2=μm gL,联立解得v′=5 m/s。
2 0 1 2 2 0
拓展 不变例3 (1)8 N·s,方向水平向左
(2)2 m/s (3)0.5 s (4)8.5 m
解析 (1)子弹射入物块A的过程,由动量守恒定律得mv =(m +m )v ,解得子弹与物块A
0 0 0 A 1
的共同速度大小为v=20 m/s
1
对子弹由动量定理得I=mv -mv =-8 N·s,所以子弹射入物块A的过程中物块对子弹的
0 1 0 0
冲量大小为8 N·s,方向水平向左。
(2)当物块A滑离平板车时,平板车的速度最大,由动量守恒定律得
mv=m v +(m+m )v
0 0 B B 0 A 2
解得平板车B的最大速度v =2 m/s
B
(3)对物块A与子弹由动量定理得
-μ(m+m )gt=(m+m )v-(m+m )v,解得物块A在平板车上滑行的时间t=0.5 s
0 A 0 A 2 0 A 1
(4)物块A滑离平板车,运动的位移大小x =t=9 m,平板车的位移大小x =t=0.5 m,则平
A B
板车的长度L=x -x =8.5 m。
A B
例4 (1)0.5 m/s (2) m 3 J
解析 (1)设物块A从圆弧轨道顶端滑到底端时的速度为v,由动能定理可得mgh=mv2
0 0
解得v==2 m/s
0
物块A滑上小车B后,物块与小车组成的系统动量守恒,设它们相对静止时的速度为v,则
有mv=(m+M)v,解得v=0.5 m/s
0
(2)对小车B由动能定理可得μmgx =Mv2,解得x = m,设系统产生的热量为Q,由能量守
B B
恒得mv2=(m+M)v2+Q,解得Q=3 J。
0
思考 这两个模型中,子弹打木块模型是一个物体从另外一个物体内部穿行,时间较短,在
滑块—木板模型中,是一个物体在另外一个物体表面滑行,时间相对较长,在运动过程中都
受到阻力作用,运动规律相同。
第 5 课时 专题强化:用三大观点解决力学问题
例1 (1)8 N 5 N (2)8 m/s
(3)0.2 m
解析 (1)当滑块处于静止时桌面对滑杆的支持力等于滑块和滑杆的重力,即 N =(m+M)g
1
=8 N
当滑块向上滑动时受到滑杆的摩擦力为1 N,根据牛顿第三定律可知滑块对滑杆的摩擦力也
为1 N,方向竖直向上,则此时桌面对滑杆的支持力大小为N =Mg-f′=5 N。
2
(2)滑块开始向上运动到碰前瞬间根据动能定理有-mgl-fl=mv2-mv2,代入数据解得v =
1 0 1
8 m/s。(3)由于滑块和滑杆发生完全非弹性碰撞,即碰后两者共速,取竖直向上为正方向,碰撞过
程根据动量守恒定律有mv=(m+M)v
1
碰后滑块和滑杆以速度v整体向上做竖直上抛运动,根据动能定理有
-(m+M)gh=0-(m+M)v2
代入数据联立解得h=0.2 m。
例2 (1)1.2 m (2)8 m/s (3)8.5 J
(4)0.4 m
解析 (1)对子弹与小车组成的系统,由动量守恒定律有mv=(m+M)v
0 0 0 1
当小物块运动到圆弧轨道的最高点时三者共速,对三者由水平方向动量守恒有(m +M)v =
0 1
(m+M+m)v
0 2
由机械能守恒定律有(m +M)v2=(m +M+m)v2+mgh,联立解得h=1.2 m,即小物块沿圆
0 1 0 2
弧轨道上升的最大高度h=1.2 m。
(2)当小物块第一次回到B点时,设车和子弹的速度为v ,取水平向右为正方向,由水平方
3
向动量守恒有
(m+M)v=(m+M)v+mv
0 1 0 3
由能量守恒定律有(m+M)v2=(m+M)v2+mv2
0 1 0 3
联立解得v=2 m/s,v=8 m/s,即小物块第一次返回到B点时速度大小为v=8 m/s。
3
(3)当弹簧具有最大弹性势能E 时,三者速度相同。由动量守恒定律有
pm
(m+M)v+mv=(m+M+m)v
0 3 0 4
由能量守恒定律有(m+M)v2+mv2=(m+M+m)v2+μmgL+E ,联立解得E =8.5 J。
0 3 0 4 pm pm
(4)小物块最终与小车保持相对静止时,三者共速,设小物块在BC段总共运动了s的路程,
由水平方向动量守恒有(m+M)v=(m+M+m)v
0 1 0 5
由能量守恒定律有(m+M)v2
0 1
=(m+M+m)v2+μmgs
0 5
联立解得s=2.4 m=4L-x
则小物块最终与小车保持相对静止时到B的距离x=0.4 m。
例3 (1)10 m/s 31.2 N (2)0
(3)0.2 m
解析 (1)滑块a从D到F,由动能定理mg·2R=mv 2-mv2
F 0
在F点由牛顿第二定律得F -mg=m,解得v =10 m/s,F =31.2 N
N F N
(2)已知滑块a返回B点时的速度
v =1 m/s,
B
设滑块a与b碰后的速度大小为v,由动能定理有:-mg·2R-μmg·L=mv 2-mv2
a B a解得v=5 m/s
a
因a、b碰撞过程动量守恒,
则mv =-mv+3mv
F a b
解得碰后b的速度v=5 m/s
b
则滑块a、b碰撞过程损失的能量
ΔE=mv 2-mv2-×3mv2
F a b
解得ΔE=0
(3)若滑块a碰到滑块b立即被粘住,则a、b碰后的共同速度v满足:
mv =4mv,解得v=2.5 m/s
F
当弹簧被压缩到最短或者伸长到最长时有共同速度v′,有4mv=6mv′,解得v′= m/s
设当弹簧被压缩到最短时压缩量为x ,由能量守恒有×(m+3m)v2=×(m+3m+2m)v′2+
1
kx2
1
解得x=0.1 m
1
系统能量守恒,弹簧最长或最短时,系统动能相等,所以弹簧最长和最短时形变量相等,则
弹簧最大长度与最小长度之差Δx=2x=0.2 m。
1
例4 (1)102 kg (2)180 J (3)6.75 m
解析 (1)设选手及装备的质量为m,为了防止A滑动,则μmg≤μ(M+m)g+0.1(M+M)g
1 2 0 0
解得m≤102 kg
(2)滑上A时速度为v
1
mv2-0=mgh
1
与C碰前速度为v
2
mv2-mv2=-μmgL
2 1 1
选手经过A与C发生碰撞后一起运动,速度为v,mv=(M+m)v
2
损失的机械能ΔE=mv2-(M+m)v2,解得ΔE=180 J
2
(3)选手与C碰撞后经0.5 s恰好与平板B速度相同,根据动量定理
ft=(M+m)v-(M+m+M)v′,
0
f=0.1×(M+m+M)g=120 N
0
解得v′=2.5 m/s
B运动距离x=t=0.625 m
1
之后一起减速,加速度大小为
a==1 m/s2
减速位移x==3.125 m,所以最大宽度d=x+x+L=6.75 m。
2 1 2第 6 课时 实验八:验证动量守恒定律
例1 (2)0.304 (6)0.31 (7)0.32
(8)= 0.34
解析 (2)用质量较小的滑块碰撞质量较大的滑块,碰后运动方向相反,故A选质量为0.304
kg的滑块。
(6)由于两段位移大小相等,根据表中的数据可得k===≈0.31。
2
(7)的平均值为
=≈0.32。
(8)弹性碰撞时满足动量守恒和机械能守恒,可得mv=-mv+mv
1 0 1 1 2 2
mv2=mv2+mv2
1 0 1 1 2 2
联立解得=,代入数据可得≈0.34。
例2 (1)C (2)ADE (3)m·OM+m·ON=m·OP m·OM2+m·ON2=m·OP2 (4)14∶11
1 2 1 1 2 1
110∶29 1.01 (5)76.8
解析 (1)验证动量守恒定律实验中,即研究两个小球在轨道水平部分碰撞前后的动量关系,
直接测定小球碰撞前后的速度是不容易的,但是可以通过落地高度不变情况下的水平射程来
体现速度。故选C;
(2)实验时,先让入射小球m 多次从斜轨上S位置由静止释放,找到其平均落地点的位置
1
P,测量平抛射程OP。然后,把被碰小球m 静置于轨道的水平部分,再将入射球m 从斜轨
2 1
上S位置由静止释放,与小球m 相碰,并多次重复。测量平均落点的位置,找到平抛运动
2
的水平位移,因此步骤中D、E是必须的,而且D要在E之前,至于用天平测质量先后均可
以。故选A、D、E。
(3)设落地时间为 t,则 v =,v′=,v′=,而动量守恒的表达式是 mv =mv′+
1 1 2 1 1 1 1
mv′,能量守恒的表达式是mv2=mv′2+mv′2,所以若两球相碰前后的动量守恒,
2 2 1 1 1 1 2 2
则m·OM+m·ON=m·OP,若碰撞是弹性碰撞,能量是守恒的,则有 m·OM2+m·ON2=
1 2 1 1 2
m·OP2
1
(4)碰撞前后m 动量之比==,==,=≈1.01
1
(5)发生弹性碰撞时,被碰小球获得的速度最大,根据动量守恒的表达式是mv =mv′+
1 1 1 1
mv′,能量守恒的表达式是mv2=mv′2+mv′2,联立解得v′=v,则对应的表达式
2 2 1 1 1 1 2 2 2 1
ON=·OP,因此最大射程为ON =76.8 cm。
max
例3 (1)一元 (2) (3)
(4)见解析
解析 (1)根据题意可知,甲与乙碰撞后没有反弹,可知甲的质量大于乙的质量,甲选用的是一元硬币;
(2)甲从O点到P点,根据动能定理-μm gs =0-mv2,解得碰撞前,甲到O点时速度的大
1 0 1 0
小v=
0
(3)同理可得,碰撞后甲的速度和乙的速度分别为v=,v=
1 2
若动量守恒,则满足mv=mv+mv
1 0 1 1 2 2
整理可得=
(4)由于存在某种系统或偶然误差,计算得到碰撞前后甲动量变化量大小与乙动量变化量大
小的比值不是1,这种误差可能的原因有:
①测量误差,因为无论是再精良的仪器总是会有误差的,不可能做到绝对准确;
②碰撞过程中,我们认为内力远大于外力,动量守恒,实际上碰撞过程中,两个硬币组成的
系统合外力不为零。
例4 (1)A (2)C
(3)-=-
解析 (1)两小球做平抛运动,水平方向上有x=vt,竖直方向上有t=,解得v=x,
可知碰撞前后的速度正比于,根据动量守恒有mv=mv′+mv′
1 1 1 1 2 2
整理得=+,故选A。
(2)碰撞后小球均做平抛运动,设斜面与水平面的夹角为α,由平抛运动规律得Lsin α=gt2,
Lcos α=vt
联立解得v=
可知碰撞前后的速度正比于,故mv =mv +mv 可变形成验证表达式m =m +m ,故选
1 0 1 1 2 2 1 1 2
C。
(3)若让两滑块分别从导轨的左右两侧向中间运动,选取向右为正方向,依题意有mv-mv
1 1 2 2
=-(m+m)v
1 2 3
设遮光片的宽度为d,则
v=,v=,v=
1 2 3
联立可得-=-。
例5 (1)10.20 (2)将气垫导轨调至水平 (3)见解析图 (4)1.96
解析 (1)游标卡尺的读数为
10 mm+4×0.05 mm=10.20 mm;
(2)滑块保持稳定,说明气垫导轨水平;
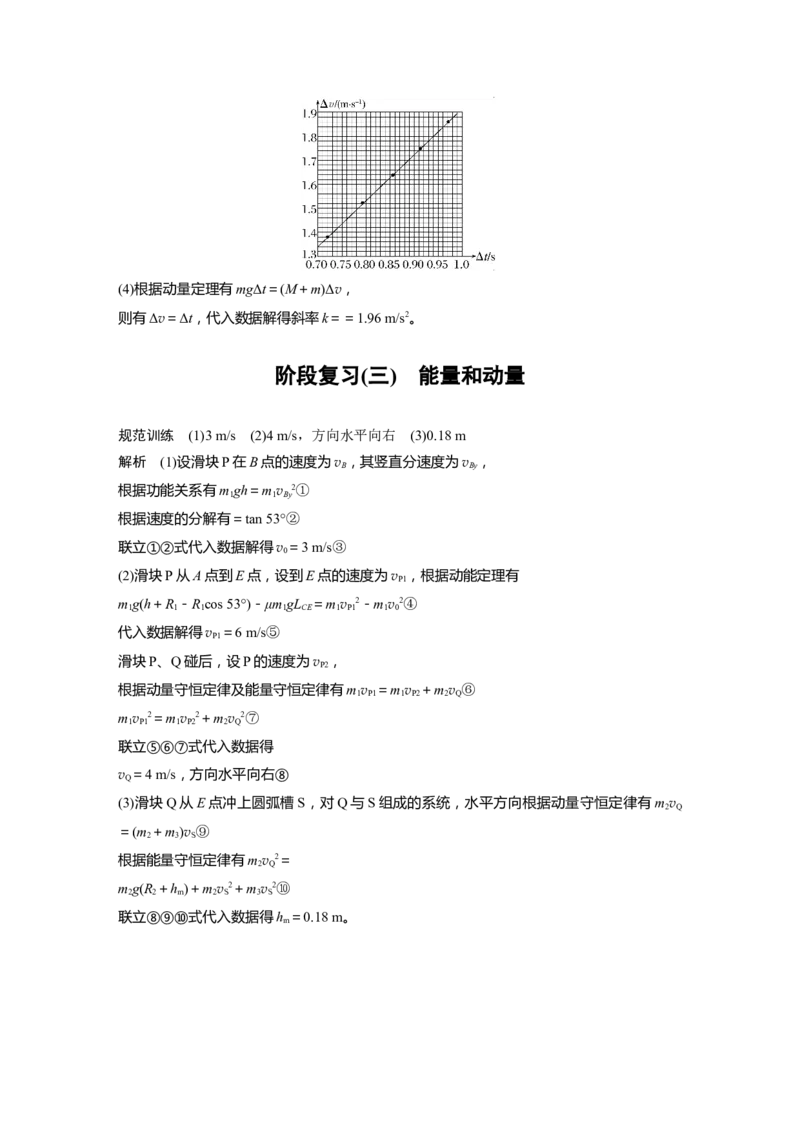
(3)根据表格中数据描点并用直线连接(4)根据动量定理有mgΔt=(M+m)Δv,
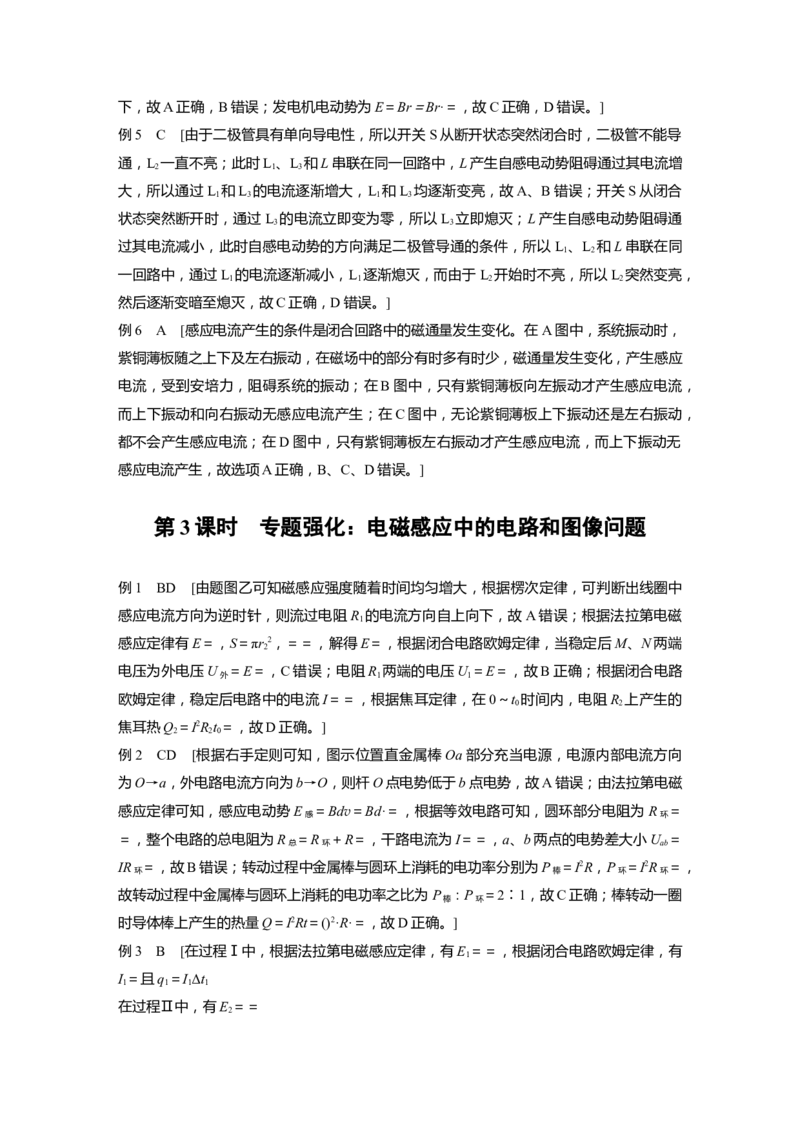
则有Δv=Δt,代入数据解得斜率k==1.96 m/s2。
阶段复习(三) 能量和动量
规范训练 (1)3 m/s (2)4 m/s,方向水平向右 (3)0.18 m
解析 (1)设滑块P在B点的速度为v ,其竖直分速度为v ,
B By
根据功能关系有mgh=mv 2①
1 1 By
根据速度的分解有=tan 53°②
联立①②式代入数据解得v=3 m/s③
0
(2)滑块P从A点到E点,设到E点的速度为v ,根据动能定理有
P1
mg(h+R-Rcos 53°)-μm gL =mv 2-mv2④
1 1 1 1 CE 1 P1 1 0
代入数据解得v =6 m/s⑤
P1
滑块P、Q碰后,设P的速度为v ,
P2
根据动量守恒定律及能量守恒定律有mv =mv +mv ⑥
1 P1 1 P2 2 Q
mv 2=mv 2+mv 2⑦
1 P1 1 P2 2 Q
联立⑤⑥⑦式代入数据得
v =4 m/s,方向水平向右⑧
Q
(3)滑块Q从E点冲上圆弧槽S,对Q与S组成的系统,水平方向根据动量守恒定律有mv
2 Q
=(m+m)v ⑨
2 3 S
根据能量守恒定律有mv 2=
2 Q
mg(R+h )+mv 2+mv 2⑩
2 2 m 2 S 3 S
联立⑧⑨⑩式代入数据得h =0.18 m。
m第八章 机械振动 机械波
第 1 课时 机械振动
例1 A [做简谐运动的小球,从C到O的过程中逐渐靠近平衡位置,速度方向指向平衡位
置,弹簧弹力充当回复力,也指向平衡位置,故速度方向与受力方向相同,所以合外力做正
功,动能增大;同时由于偏离平衡位置的位移减小,由回复力公式F=-kx可知,回复力逐
渐减小,根据牛顿第二定律可知 F=-kx=ma,故加速度不断减小,故A正确;由上述分
析可知回复力不断减小,整个系统只有系统内的弹簧弹力做功,故系统的机械能守恒,故 B
错误;在小球从C到O的过程中,弹簧形变量逐渐减小,故弹性势能逐渐减小,同时由上
述分析可知,加速度也逐渐减小,故C、D错误。]
例2 B [简谐运动的质点,先后以同样的速度通过M、N两点,则可判定M、N两点关于
平衡位置O点对称,所以质点由M到O时间与由O到N的时间相等,那么平衡位置O到N
点的时间t =0.5 s,因过N点后再经过t=1 s,质点以方向相反、大小相同的速度再次通过
1
N点,则有从N点到最大位移处的时间t =0.5 s,因此,质点振动的周期是T=4(t +t)=4
2 1 2
s。这2 s内质点通过的总路程的一半,即为振幅,所以振幅A==6 cm,故选B。]
例3 D [A、B的振动频率相同,相位差恒定且为-0.8π,故A的相位比B的相位总滞后
0.8π,故A错误;A、B的振动频率均为 Hz= Hz,故B错误;t=0时,A的位移为负向最
大,故加速度为正向最大,故C错误;t= s时,B的位移为0,处在平衡位置,故B的加速
度最小,故D正确。]
例4 BC [在t=0.1 s时,该质点处于正方向最大位移处,速度为零,A错误;据a==-x
可知,在t=0.1 s时,该质点具有x轴负方向最大加速度,B正确;在0.1~0.2 s时间内,质
点从正方向最大位移处运动至平衡位置,即质点沿x轴负方向做加速度减小的加速运动,C
正确;在0~0.6 s时间内,质点运动的路程为6A,即120 cm,D错误。]
例5 C [由振动图像可知甲、乙两个单摆周期之比为T ∶T =0.8∶1.2=2∶3,根据单摆
甲 乙
周期公式T=2π,可得l=,则甲、乙两个单摆的摆长之比为l ∶l =T 2∶T 2=4∶9,故
甲 乙 甲 乙
选C。]
例6 B [A、B经过O点时的向心加速度不为零,所受合力提供向心力,不为零,处于非
平衡状态,故A错误;设当位移为x时,摆角为θ,当θ较小时,有sin θ=,对两物块进行
受力分析可得sin θ=,联立得回复力的大小为F=x,考虑回复力的方向,故B正确;A、
B由O点向C点运动的过程中,设位移为y,摆角为α,以A、B整体为研究对象,在速度
方向有F=Gsin α=m a,a=gsin α,对A进行受力分析可得G sin α-F=m a ,由题意
AB A f A A可得a=a ,联立解得F=0,故C错误;单摆的振幅与摆动物体的质量无关,所以将 A取
A f
走,B的振幅不变,故D错误。]
例7 D [树干在采摘振动头的振动下做受迫振动,则稳定后,不同粗细树干的振动频率始
终与采摘振动头的振动频率相同,故 A错误;采摘振动头停止振动,则树干的振动频率不
变,振幅减小,故B错误;当采摘振动头的振动频率等于树木的固有频率时产生共振,此
时树干的振幅最大,落果效果最好,因此采摘振动头振动频率越大,落果效果不一定越好,
故C错误;对于粗细不同的树干,其固有频率一般不同,可以调整采摘振动头的频率等于
树干的固有频率达到共振,使采摘效果最佳,故D正确。]
例8 B [由题图可知,振幅最大时,此单摆的振动频率与固有频率相等,则有 f=0.5 Hz,
可知此单摆的固有周期为T==2 s,根据单摆周期公式T=2π,可知此单摆的摆长为l=≈1
m,故A错误,B正确;若摆长增大,由单摆周期公式T=2π可知,单摆的固有周期增大,
则固有频率减小,所以共振曲线的峰将向左移动,故C、D错误。]
第 2 课时 实验九:用单摆测量重力加速度
例1 (1)0.006(0.005、0.007也可) 20.035(20.034、20.036均可)
20.029(20.027、20.028、20.030均可) (2)大于 (3)82.5 1.82 9.83
解析 (1)题图(a)读数为0+0.6×0.01 mm=0.006 mm(0.005 mm、0.007 mm也可);
题图(b)读数为20 mm+3.5×0.01 mm=20.035 mm(20.034 mm、20.036 mm均可);
则摆球的直径为20.035 mm-0.006 mm=20.029 mm(20.027 mm、20.028 mm、20.030 mm均
可)
(2)若角度盘上移则形成如图所示图样,则实际摆角大于5°。
(3)摆长=摆线长度+半径,代入数据计算可得摆长为82.5 cm;
小球从第1次到61次经过最低点经过了30个周期,
则T= s=1.82 s
根据单摆周期公式T=2π,
可得g=≈9.83 m/s2。
例2 (1)D (2)BC (3)①C ②9.86
(4)=
解析 (1)为减小空气阻力的影响,摆球应采用密度较大、体积较小的铁球,为使单摆摆动时摆长不变化,摆线应用不易形变的细丝线,悬点应该用铁夹来固定,故选D。
(2)根据单摆周期公式有T=2π,可得重力加速度为g=,测量摆长时,应该测量竖直拉直后
的摆线长,故A错误;在摆球运动过程中,必须保证悬点固定不动,故B正确;摆球运动
过程中,摆线与竖直方向的夹角不能太大,如摆角太大,将不能看作简谐运动,单摆周期公
式失效,故C正确;测量周期时,应该从摆球运动到最低点时开始计时,因为最低点位置
摆球速度最大,相同的视觉距离误差引起的时间误差较小,则周期测量比较准确,故 D错
误。
(3)由题图可知,设M点到石块重心的距离为d,根据周期公式T=2π,可得T2=(l+d),故
T2-l图像的斜率为k=,故选C。由于k==×102=4,解得重力加速度的测量值为g=π2
m/s2≈9.86 m/s2。
(4)由之前的分析可知,有T2=(l+d),T2-l图像的斜率为k=,其重力加速度为g=,由上
述分析可知,其摆长的测量不影响重力加速度的测量结果,所以其测量值等于真实值。
例3 (4)或 见解析图 (5)在误差允许范围内,“杆线摆”在摆长一定的情况下,T和成正
比,即周期跟(等效)重力加速度的平方根成反比
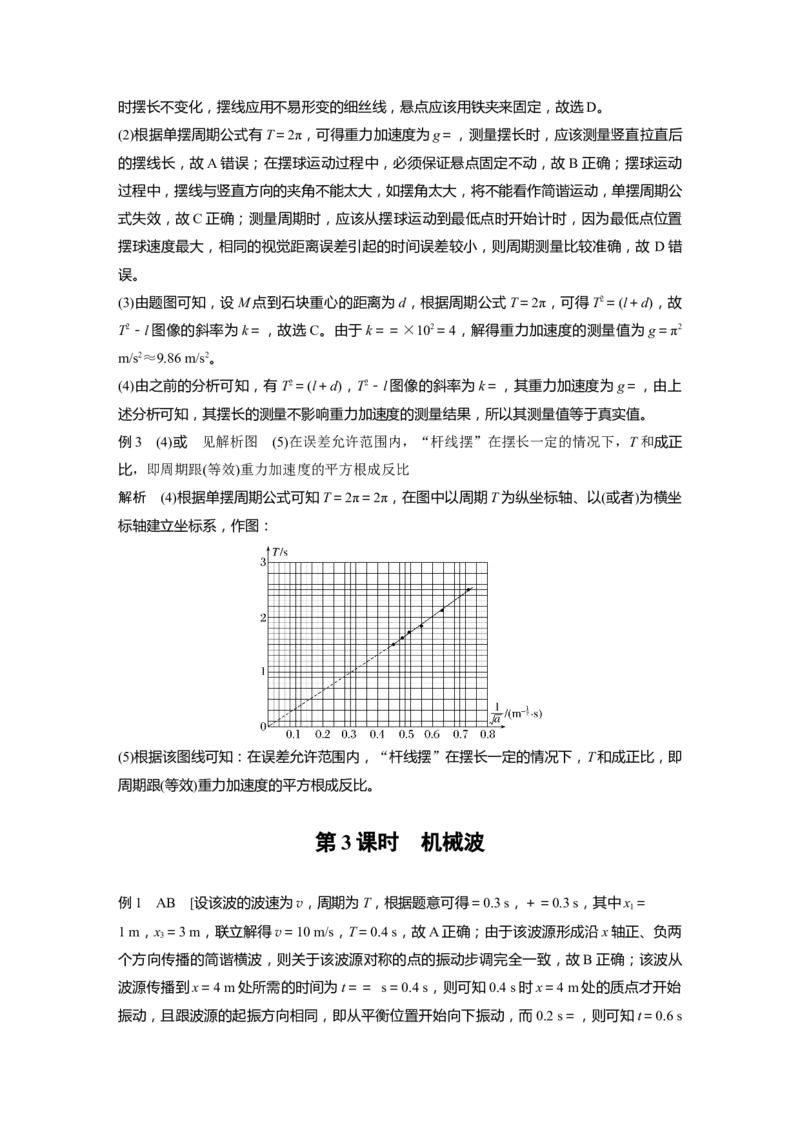
解析 (4)根据单摆周期公式可知T=2π=2π,在图中以周期T为纵坐标轴、以(或者)为横坐
标轴建立坐标系,作图:
(5)根据该图线可知:在误差允许范围内,“杆线摆”在摆长一定的情况下,T和成正比,即
周期跟(等效)重力加速度的平方根成反比。
第 3 课时 机械波
例1 AB [设该波的波速为v,周期为T,根据题意可得=0.3 s,+=0.3 s,其中x=
1
1 m,x =3 m,联立解得v=10 m/s,T=0.4 s,故A正确;由于该波源形成沿x轴正、负两
3
个方向传播的简谐横波,则关于该波源对称的点的振动步调完全一致,故B正确;该波从
波源传播到x=4 m处所需的时间为t== s=0.4 s,则可知0.4 s时x=4 m处的质点才开始
振动,且跟波源的起振方向相同,即从平衡位置开始向下振动,而0.2 s=,则可知t=0.6 s时,x=4 m的质点到达平衡位置,正向上振动,此刻该质点具有正向最大速度,故C错误;
波传播到x=-2.5 m处所用的时间为t == s=0.25 s,则再经过0.25 s,x=-2.5 m的质点
1
正从平衡位置上方向正向最大位移处振动,而离平衡位置越远加速度越大,速度越小,即该
质点的加速度正在增大,故D错误。]
例2 B [船在1 min时间内上下浮动30次,故水波的周期为T= s=2 s,A错误;当甲船
位于波峰时,乙船位于波谷,这时两船之间还有两个波峰,故两船间水平距离为 s=(2+)λ
=20 m,解得水波的波长为λ=8 m,B正确;水波的波速为v== m/s=4 m/s,C错误;两
船上下振动,不会随波迁移,经过一段时间,甲、乙两船不会靠近,D错误。]
例3 D [由波形图可直接得出该波的波长λ=4 m,振幅A=10 cm,故A错误;由波形图
知,t=0时,x=2 m处的质点此刻在负向最大位移处,此处加速度指向平衡位置,为正向
最大,故B错误;根据质点P沿y轴方向的振动情况,可知下一时刻,P质点将向y轴正方
向振动,根据“同侧法”可知该波沿x轴正方向传播,故C错误;根据质点P沿y轴方向做
简谐运动的表达式为y=10sin (5πt) cm,可得这列波的周期为T== s=0.4 s,得波速v==
m/s=10 m/s,故D正确。]
例4 B [由振动图像可知,质点Q起振方向沿y轴正方向,由于各质点的起振方向与波源
相同,故质点P开始振动的方向沿y轴正方向,A错误;从题图可以看出质点Q的振动图像
向左平移4 s后与质点P的图像重合,故Q比P滞后4 s,振动周期为6 s,结合振动的周期
性可知,该波从P传到Q的时间为Δt=4 s+nT=(6n+4) s(n=0,1,2,3…),可能为4 s,10
s,16 s等,不可能为7 s,D错误;该波的传播速度为v=,结合D解析中的数据可知,可
能为4 m/s,1.6 m/s,1 m/s等,不可能为5 m/s,C错误;波长为λ=vT,结合C解析中的数据
可知,波长可能为24 m,9.6 m,6 m等,B正确。]
例5 D [由质点Q的振动图像可知0.5 s时刻Q质点正在向-y方向振动,在题图(a)中根
据同侧法可以判断出波沿-x方向传播,故A、B错误;根据波的图像可得波长为 λ=24
cm,根据振动图像可得质点振动的周期即波传播的周期为T=6 s,则波速为v==4 cm/s,
根据同侧法可得0.5 s时刻P质点正在向平衡位置运动,在加速,而Q质点则正在向负向最
大位移处运动,在减速,C错误;由于质点P、Q的平衡位置的距离不是半波长的整数倍,
所以质点P、Q振动方向有时相同有时相反,D正确。]
例6 C [该列波的周期为T=0.1 s
所以波长为λ=vT=0.8 m
波传到P、Q两点所需要的时间
t == s,t == s
P Q
t=1.0 s时P、Q已振动时间为
Δt = s=4T,
PΔt = s=3T
Q
由题图乙可知质点起振方向向上,所以此时 P点处于波谷处,Q点处于波峰处。又P、Q两
点间距离为1.2 m,可知PQ=1λ,故选C。]
例7 B [根据多普勒效应可知,探测器接收到的回声频率与被探测物相对探测器运动的速
度有关,而两列声波发生干涉的条件是频率相等,所以两列声波相遇时不一定发生干涉,故
A、D错误;声波由水中传播到空气中时,声波的波速发生变化,所以波长会发生改变,故
B正确;根据波长的计算公式可得λ== m=1×10-3 m,当遇到尺寸约1 m的被探测物时
不会发生明显衍射,故C错误。]
例8 D [甲波的频率为4 Hz,v=λf=2×4 m/s=8 m/s,由于在同一介质中传播,所以波速
相同,均为8 m/s,故A错误;由于甲、乙两波的波长相等,此时在x=0处质点在平衡位置
且两波引起的振动方向均向上,经过一段时间为峰峰相遇或谷谷相遇,两列波叠加后振动加
强,故B错误;x=0处的质点振动加强,x=0.5 m处的质点振动减弱,振幅为10 cm,故C
错误;两列稳定的波叠加后,形成稳定的振动图样,两列波在某一点引起质点的振动情况是
稳定的,介质中振动加强和减弱区域的位置稳定不变,故D正确。]
第九章 静电场
第 1 课时 静电场中力的性质
例1 A [两小球接触前,由库仑定律得F=k=,两小球接触后再分开,正负电荷中和后电
荷量均分,设分开的距离为x,则有F=k=,解得x=d,故选A。]
例2 D [a和b电荷量为+q,c和d电荷量为-q,则c、d电荷对a电荷的库仑力为引力,
b电荷对a电荷的库仑力为斥力,根据库仑定律,库仑力大小分别为F =,F =F =k;根
ca ba da
据力的合成法则,a电荷所受的库仑力大小为F=,故A、B、C错误,D正确。]
例3 BD [隔离法:P、Q两物体都是三力平衡,且P、Q在水平方向受到的是大小相等的
库仑引力,P、Q一定是带异种电荷,电荷量大小关系不能确定,选项A错误;由库仑引力
F、重力mg和倾角的关系式F=mgtan θ可知,P、Q质量之比为==,选项B正确;
整体法:对由斜面体和P、Q所构成的整体,水平面对斜面体支持力等于总重力,水平面对
斜面体没有摩擦力,水平面对斜面体的支持力F =(M+m+m)g,选项C错误,D正确。]
N 1 2
例4 C [由A处试探电荷的F-q图线可得,该处的电场强度为E ==4×105 N/C,方向
1
沿x轴正方向,同理可得,B处的电场强度为E ==0.25×105 N/C,方向沿x轴负方向,
2
A、B错误;由A、B的分析可知,点电荷Q应为负电荷,且在A、B之间,设Q到A点的距离为l,由点电荷电场强度公式可得E =k=4×105 N/C,E =k=×105 N/C,联立解得l
1 2
=0.1 m,故点电荷Q的位置坐标为0.3 m,C正确,D错误。]
例5 C [将电场强度E、E 反向延长,交点即为点电荷Q所在的位置,如图所示,由于电
b
场方向向外,故该点电荷Q带正电,根据几何知识可得,a点到点电荷Q的距离为r =d,
a
则b点到Q的距离为r =d,a、b两点到Q的距离之比为1∶,由E=k,可得a、b两点的
b
电场强度之比为3∶1,得出E=,故C正确,A、B、D错误。]
b
例6 D [电场线的疏密表示电场强度的相对大小,根据题图可知,P点电场强度大小等于
Q点电场强度大小,但是两点电场强度的方向不同,则电场强度不相同,故A错误;同理,
M点的电场线较N点密集,可知M点的电场强度大于N点的电场强度,故B错误;根据电
场线的方向可知,右边的点电荷带负电,但是带电荷量小于左边点电荷的带电荷量,故右边
的点电荷带电荷量为-q,故C错误;依据点电荷的电场强度公式E=k,则两点电荷连线的
中点处的电场强度大小为E =k+k=3k,故D正确。]
合
例7 AC [等量异种点电荷连线的中垂线是一条等势线,电场强度方向与等势线垂直,因
此E、F两点电场强度方向相同,由于E、F是连线中垂线上关于O对称的两点,则其电场
强度大小也相等,故A正确;根据对称性可知,A、D两点处电场线疏密程度相同,则A、
D两点电场强度大小相等,由题图甲看出,A、D两点电场强度方向相同,故B错误;由题
图甲看出,B、O、C三点比较,O点处的电场线最稀疏,电场强度最小,故C正确;由题
图可知,电子从C点向O点运动过程中,电场强度逐渐减小,则静电力逐渐减小,由牛顿
第二定律可知电子的加速度逐渐减小,故D错误。]
微点突破 4 电场强度的叠加
例1 CD [A、B、C三点的点电荷在O点产生的电场强度方向如图所示,由电场的叠加原
理可知,O点的电场方向竖直向下,根据平衡条件可得,小球带负电,A错误;O点的合电
场强度为E=2cos 60°+=3,B错误;由平衡条件得Mg=q,得q=,C正确;撤去C点点
电荷瞬间E′=,由牛顿第二定律有Mg-=Ma,得a=g,D正确。]例2 C [A点的电场强度为0,则圆环上的电荷在A点的电场强度与位于B点的电荷量为
Q的负点电荷在A点的电场强度等大反向,即带电圆环在A点的电场强度大小为E=k=k,
根据对称性可知圆环上的电荷在B点的电场强度大小也为E=k,方向向右;若撤去B点的
负点电荷,在C点放置电荷量为2Q的正点电荷时,根据电场强度的叠加原理可知B点的电
场强度大小E =k-E=,故选C。]
B
例3 A [把圆心在O点的二分之一球壳补为完整的带电荷量为2q的带电球壳,则在M、N
两点的电场强度大小均为E ==。题图中左半球壳在M点产生的电场强度为E,则右半球
0
壳在M点产生的电场强度为E′=E -E=-E,由对称性知,左半球壳在N点产生的电场
0
强度大小也为-E,故选A。]
例4 B [把圆环分为n等份(n足够大),每一份的电荷量为Δq,则有n=,每小份可以看成
点电荷,由点电荷的电场强度公式可知每小份产生的电场在 P点的电场强度大小均为E
0
=,由几何关系sin 37°=,可得E =。在P点,E 在垂直x轴方向的分量大小为E,根据
0 0 y
对称性,n个E 的矢量和为0,E 在x轴方向的分量大小为E=Ecos 37°,n个E 的矢量和
y 0 x 0 x
就是圆环产生的电场在P点的电场强度,即E=nE,解得E=,A、C、D错误,B正确。]
x
跟踪训练
1.B [AB、BC、DF、FA棒所带电荷量均为+q,其在P点产生的合电场强度设为E ,若
0
CD棒所带电荷量也为+q,根据对称性P点的电场强度应为0,由于CD棒所带电荷量为
-2q,可等效为-3q电荷与+q电荷,由题意和点电荷电场强度公式E=k可知E=3E ,若
0
移走CD棒而保持其他棒的位置和电荷分布不变,则相当于未移走 CD棒且CD棒所带电荷
量为-q,在P点产生的电场强度为E=,故选B。]
0
2.B [球壳的面积S=4πR2
单位面积电荷量σ=
A、B两处的电荷在O点的电场强度大小E=2cos 60°=
1
方向沿OC方向,故取走A、B两处的电荷后,球壳剩余部分在O点的电场强度大小为E=
2
方向沿CO方向,q在O点的电场强度大小E =E ,则有=,方向沿OC方向,可知q为负
3 2
电荷,电荷量为q=,故选B。]
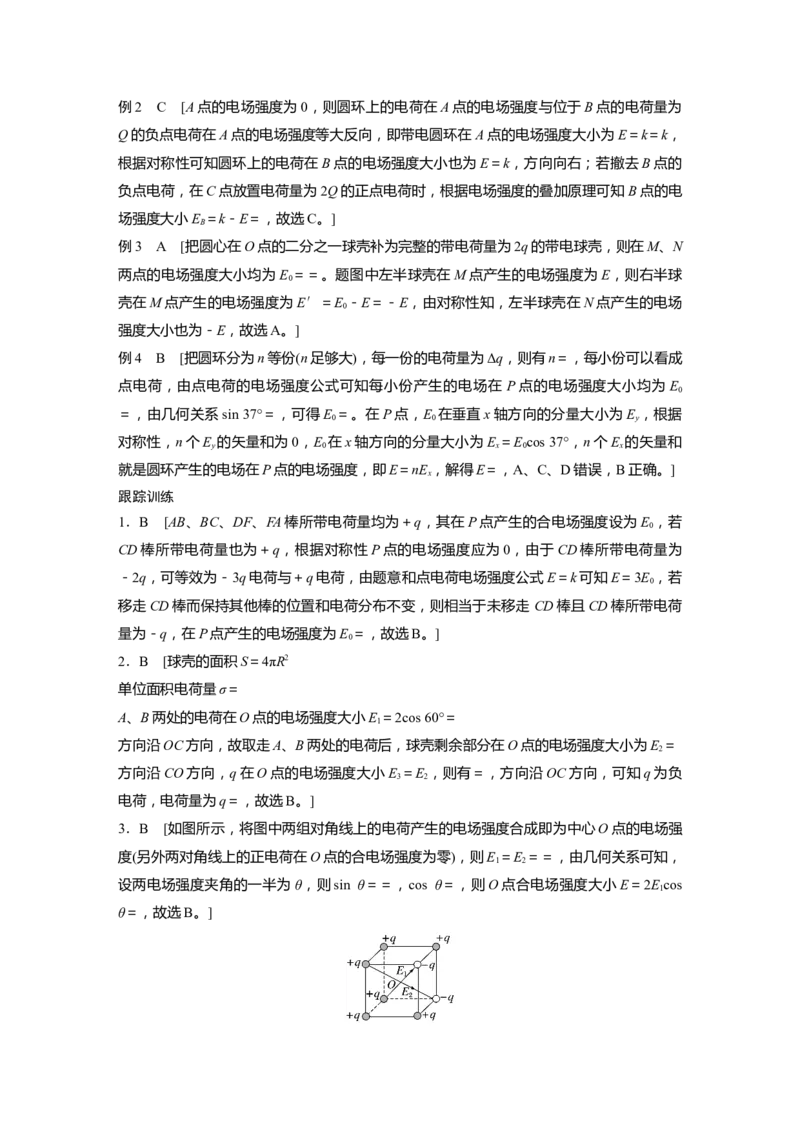
3.B [如图所示,将图中两组对角线上的电荷产生的电场强度合成即为中心O点的电场强
度(另外两对角线上的正电荷在O点的合电场强度为零),则E =E ==,由几何关系可知,
1 2
设两电场强度夹角的一半为θ,则sin θ==,cos θ=,则O点合电场强度大小E=2Ecos
1
θ=,故选B。]4.(1)q 均为正电荷 (2)q
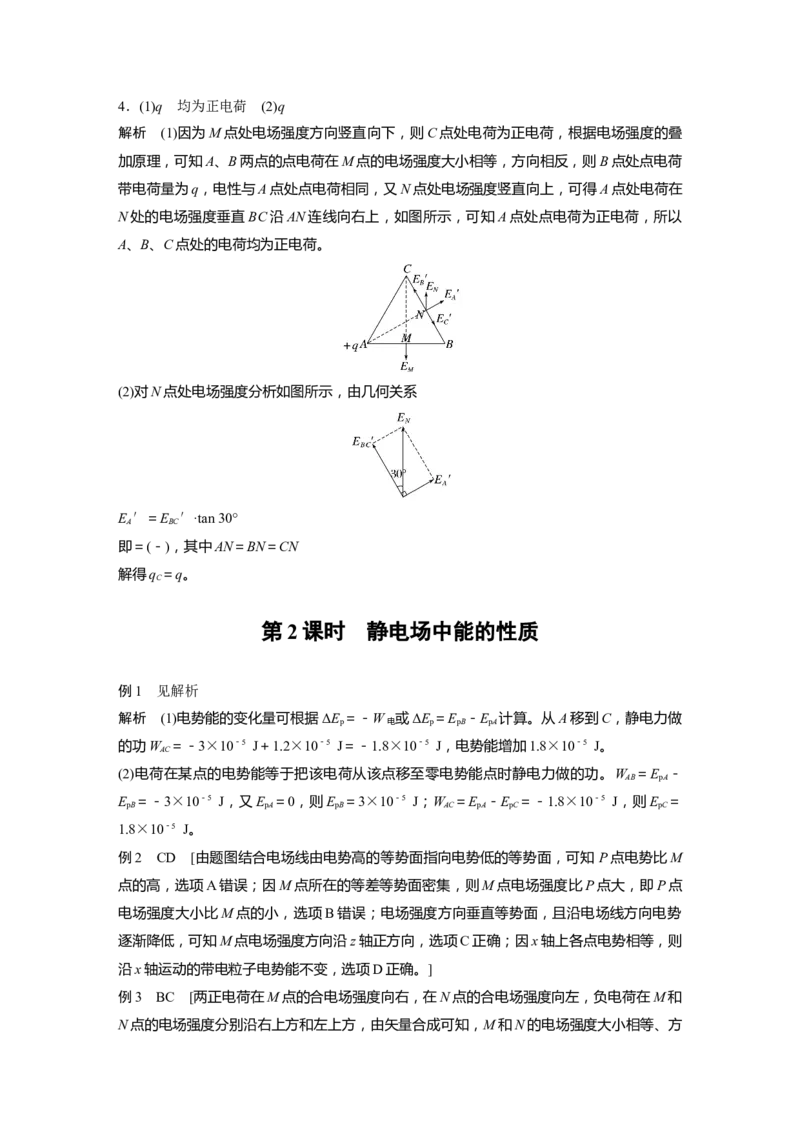
解析 (1)因为M点处电场强度方向竖直向下,则C点处电荷为正电荷,根据电场强度的叠
加原理,可知A、B两点的点电荷在M点的电场强度大小相等,方向相反,则B点处点电荷
带电荷量为q,电性与A点处点电荷相同,又N点处电场强度竖直向上,可得A点处电荷在
N处的电场强度垂直BC沿AN连线向右上,如图所示,可知A点处点电荷为正电荷,所以
A、B、C点处的电荷均为正电荷。
(2)对N点处电场强度分析如图所示,由几何关系
E ′=E ′·tan 30°
A BC
即=(-),其中AN=BN=CN
解得q =q。
C
第 2 课时 静电场中能的性质
例1 见解析
解析 (1)电势能的变化量可根据ΔE =-W 或ΔE =E -E 计算。从A移到C,静电力做
p 电 p pB pA
的功W =-3×10-5 J+1.2×10-5 J=-1.8×10-5 J,电势能增加1.8×10-5 J。
AC
(2)电荷在某点的电势能等于把该电荷从该点移至零电势能点时静电力做的功。W =E -
AB pA
E =-3×10-5 J,又E =0,则E =3×10-5 J;W =E -E =-1.8×10-5 J,则E =
pB pA pB AC pA pC pC
1.8×10-5 J。
例2 CD [由题图结合电场线由电势高的等势面指向电势低的等势面,可知 P点电势比M
点的高,选项A错误;因M点所在的等差等势面密集,则M点电场强度比P点大,即P点
电场强度大小比M点的小,选项B错误;电场强度方向垂直等势面,且沿电场线方向电势
逐渐降低,可知M点电场强度方向沿z轴正方向,选项C正确;因x轴上各点电势相等,则
沿x轴运动的带电粒子电势能不变,选项D正确。]
例3 BC [两正电荷在M点的合电场强度向右,在N点的合电场强度向左,负电荷在M和
N点的电场强度分别沿右上方和左上方,由矢量合成可知,M和N的电场强度大小相等、方向不同,A错误;由等量同种电荷的电场分布规律,可知两正电荷的电场在M和N两点的
电势相同,负电荷C在M、N两点的电势也相同,故M、N两点的电势相同,B正确;两正
电荷在M点的电势比在O点的高(因两正电荷在AO间的合电场强度向右),负电荷C产生的
电场中,离负电荷越近电势越低,故负电荷在M点的电势也比在O点的要高,可知M点电
势比O点高,而负电荷在电势越高处电势能越小,C正确;N点和M点电势相同,则负电
荷在N点电势能也比在O点时要小,D错误。]
例4 B [由题图可知,b、c两点间的电势差为U =200 V-300 V=-100 V,故A错误;
bc
由题图可知,a点与相邻两等势面的距离均小于1 m,电势差等于100 V,根据E=可知a点
电场强度大小大于100 V/m,故B正确;根据电场强度方向垂直于等势面,可知a点的电场
强度方向沿竖直方向,不是水平方向,故C错误;由题图可知,a点与c点在同一等势面上,
电势均为300 V,故D错误。]
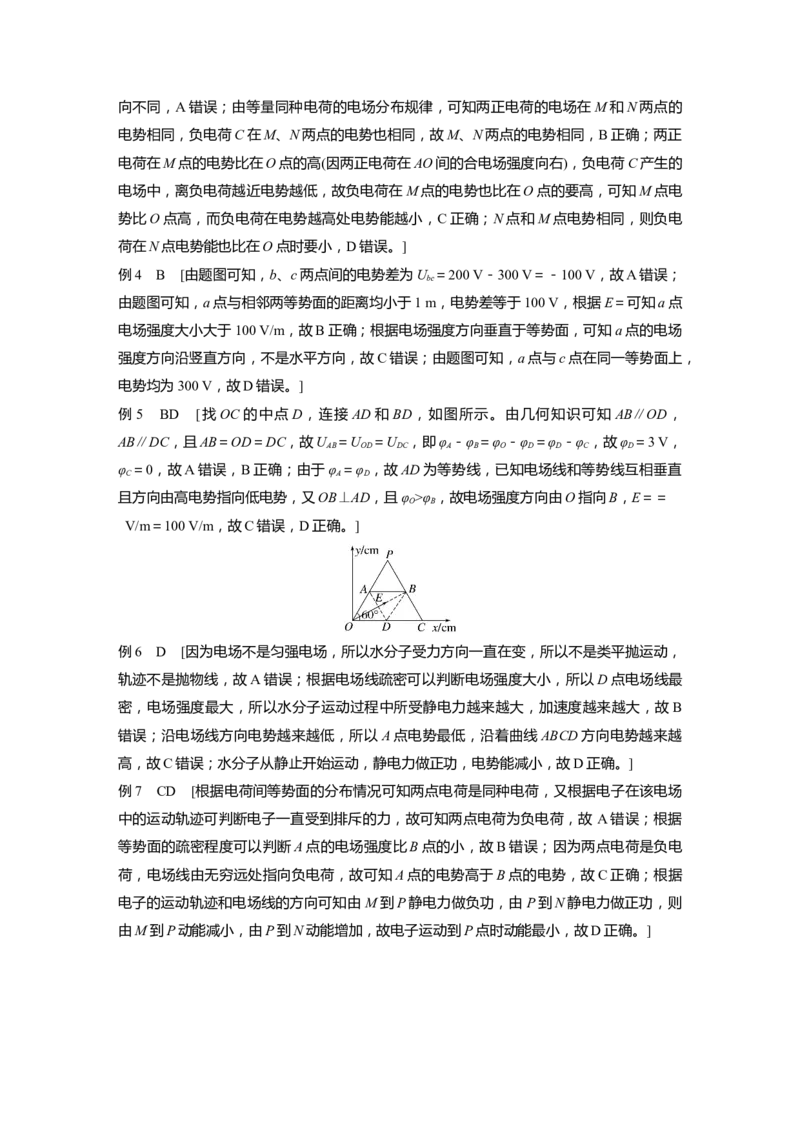
例5 BD [找OC 的中点 D,连接AD和BD,如图所示。由几何知识可知 AB∥OD,
AB∥DC,且AB=OD=DC,故U =U =U ,即φ -φ =φ -φ =φ -φ ,故φ =3 V,
AB OD DC A B O D D C D
φ =0,故A错误,B正确;由于φ =φ ,故AD为等势线,已知电场线和等势线互相垂直
C A D
且方向由高电势指向低电势,又OB⊥AD,且φ >φ ,故电场强度方向由O指向B,E==
O B
V/m=100 V/m,故C错误,D正确。]
例6 D [因为电场不是匀强电场,所以水分子受力方向一直在变,所以不是类平抛运动,
轨迹不是抛物线,故A错误;根据电场线疏密可以判断电场强度大小,所以D点电场线最
密,电场强度最大,所以水分子运动过程中所受静电力越来越大,加速度越来越大,故B
错误;沿电场线方向电势越来越低,所以 A点电势最低,沿着曲线ABCD方向电势越来越
高,故C错误;水分子从静止开始运动,静电力做正功,电势能减小,故D正确。]
例7 CD [根据电荷间等势面的分布情况可知两点电荷是同种电荷,又根据电子在该电场
中的运动轨迹可判断电子一直受到排斥的力,故可知两点电荷为负电荷,故 A错误;根据
等势面的疏密程度可以判断A点的电场强度比B点的小,故B错误;因为两点电荷是负电
荷,电场线由无穷远处指向负电荷,故可知A点的电势高于B点的电势,故C正确;根据
电子的运动轨迹和电场线的方向可知由M到P静电力做负功,由P到N静电力做正功,则
由M到P动能减小,由P到N动能增加,故电子运动到P点时动能最小,故D正确。]第 3 课时 专题强化:电场中的图像问题 电场中的功能
关系
例1 B [小球B向下运动的过程中受到重力、库仑力、弹簧的弹力作用,当弹簧的弹力、
重力、库仑力的合力为0时,小球B的加速度为0,速度最大,故A错误;开始运动时,弹
簧的弹力小于重力和库仑力之和,合力竖直向下,小球向下做加速运动,由于弹簧的弹力逐
渐增大,库仑力减小,合力减小,加速度减小,当合力减小为0时,速度最大,之后弹簧的
弹力大于重力与库仑力之和,合力竖直向上,小球向下做减速运动,弹簧的弹力逐渐增大,
库仑力减小,合力竖直向上,加速度增大,因此小球 B的加速度先减小后增大,故B正确;
由于库仑力对小球B做正功,由功能关系可知,小球B与弹簧组成系统的机械能一定增大,
故C错误;库仑力对小球B做正功,小球A与B组成系统的电势能一直减小,故D错误。]
例2 B [小球动能的增加量为ΔE =m(2v)2-mv2=mv2,A错误;小球在竖直方向上的分
k
运动为匀减速直线运动,到N时竖直方向的速度为零,则M、N两点之间高度差为h=,小
球重力势能的增加量为ΔE =mgh=mv2,C错误;静电力对小球做正功,则小球的电势能减
p
少,由能量守恒定律可知,小球减小的电势能等于重力势能与动能的增加量之和,则电势能
的减少量为ΔE′=mv2+mv2=2mv2,D错误;由功能关系可知,除重力外的其他力对小球
p
所做的功在数值上等于小球机械能的增加量,即2mv2,B正确。]
例3 AC [根据速度由v 变为v ,速度减小,可知静电力对粒子做负功,电势能增加。根
1 2
据带电粒子在电场中的运动规律可知,负电荷高势低能,则 φ >φ ,故A正确;电场线密集
A B
的位置等势面密集,电场强度更大,则带电粒子受到的静电力更大,加速度大,在 v-t图
像中斜率的绝对值更大,A处斜率的绝对值大于B处斜率的绝对值,则电场强度的关系
E >E ,A点附近的等势面要比B点附近的等势面密集,故B错误,C正确;粒子从A点到
A B
B点的过程中,速度一直减小,则静电力一直做负功,电势能一直增大,故不可能两次经过
同一个等势面,故D错误。]
例4 BC [φ-x图像的斜率的绝对值表示电场强度的大小,斜率的正负表示电场强度的方
向,由题图可知,a、c两点电势相等,但电场强度大小和方向均不同,故A错误;由题图
可知,d点图像斜率为零,表明该点的合电场强度为零,而 d点到两点电荷q 、q 的距离之
1 2
比为2∶1,根据点电荷电场强度公式E=可得,q、q 电荷量之比为4∶1,故B正确;a、c
1 2
两点电势相等,电势差为零,负电荷从a点移到c点,静电力做功为零,故C正确;c、d间
电场方向向左,负电荷从c点移到d点,静电力做正功,电势能减小,故D错误。]
例5 D [由E-x图像可知,在x轴上的P点对应x 点,在P点的左侧电场强度为正值,
2
沿x轴正方向,右侧为负值,可知A、B带等量负电荷,A错误;电荷量为q的正点电荷,从O点到P点,静电力做正功,电势能减小,从P点沿x轴正方向运动,静电力做负功,电
势能增加,因此点电荷q在x 处电势能不是最大,且点电荷q在x 处动能最大,B、C错误;
1 2
由对称性可知,点电荷q沿x轴正方向最远能到达O′处,由动能定理qU =ΔE =0,则
OO′ k
U =0,由对称性知O′与O关于P点对称,故点电荷q沿x轴正方向运动的最远距离为
OO′
2x,D正确。]
2
例6 D [E -x图像的斜率表示粒子所受静电力F,根据F=qE可知x 处电场强度最小且
p 1
为零,选项A错误;粒子在0~x 段切线的斜率发生变化,静电力发生变化,所以加速度也
2
在变化,做变速运动,x ~x 段斜率不变,所以做匀变速直线运动,选项 B错误;带负电的
2 3
粒子从x 到x 的过程中电势能增加,说明电势降低,即 φ>φ ,选项C错误;x ~x 段斜率
1 3 1 3 2 3
不变,所以这段电场强度大小、方向均不变,选项D正确。]
第 4 课时 电容器
实验十:观察电容器的充、放电现象 带电粒子在电场中的
直线运动
例1 (1)2 自右向左 减少 (2)BC
解析 (1)单刀双掷开关S应拨至2位置,会使电容器放电。电容器充电后,电容器下极板
带正电,则放电过程中,电流自右向左通过R。电压表的示数逐渐变小,由C=可知,电容
器的带电荷量减少。
(2)充电电流应逐渐减小,充电完毕后,电流表示数为零,A错误,C正确;根据C=,电容
器电荷量逐渐增大,则电压表示数逐渐增大后趋于稳定,B正确,D错误。
例2 (1)= (2)0.15 (3)<
解析 (1)题图乙中阴影面积S 和S 分别表示充电和放电中电容器上的总电荷量,所以两者
1 2
相等。
(2)由阴影面积代表电容器上的电荷量得q=S=1.203 C,U=E=8 V,则C== F
1
≈0.15 F。
(3)由题图乙可知充电瞬间电流大于放电瞬间电流,且充电瞬间电源电压与放电瞬间电容器
两极板电压相等,由>,解得R<R。
1 2
例3 A [根据题意可知极板之间电压U不变,极板上所带电荷量Q变少,根据电容定义式
C=可知,电容器的电容C减小,D错误;根据电容的决定式C=可知,极板间距d增大,
极板之间形成匀强电场,根据E=可知,极板间电场强度E减小,B、C错误;极板间距d增大,材料竖直方向尺度减小,A正确。]
例4 D [根据电容的决定式C=,负极板向右移动,板间距离d增大,电容减小,故A错
误;充电后的电容器与电源断开连接后,极板带电荷量Q保持不变,故B错误;由C=,
当Q不变,C减小时,U增大,故C错误;由C=,C=,E=可得E=,在带电荷量Q一
定时,只改变距离d,E不变,故D正确。]
例5 B [电容器的电容由电容器本身性质决定,不随其电压或电荷量的变化而变化,故A
错误;增强照射电阻R 的光照强度,R 阻值减小,回路总电阻减小,总电流增大,则R 两
3 3 1
端电压增大,电容器两极板间电压增大,根据E=可知两极板间电场强度增大,而下极板接
地,电势为零,设M到下极板间的距离为d′,则M点的电势为φ =Ed′,所以M点的电
M
势升高,故B正确;根据平衡条件可知,开始时液滴受静电力与重力平衡,增强照射电阻
R 的光照强度,电容器两极板间电场强度增大,液滴所受静电力增大,将大于重力,则液
3
滴所受合外力向上,将向上运动,故C错误;由电路连接方式易知电容器上极板带正电,
增强照射电阻R 的光照强度,电容器两极板间电压增大,根据Q=CU可知电容器充电,R
3 2
中有向左的电流,故D错误。]
例6 B [根据E=,qE=ma,可得a=
将两板间距离减小,带电粒子获得的加速度变大,故A错误;根据匀变速直线运动规律d=
at2,解得t=,将两板间距离减小,带电粒子到达负极板的时间变短,故B正确;根据动能
定理有qU=mv2,解得v=,带电粒子到达负极板时的速度不变,故C错误;根据动量定理
有I=mv,可知加速全过程静电力对带电粒子的冲量不变,故D错误。]
例7 (1) (2)3.5L
解析 (1)设小球A刚进入电场时的速度大小为v,从释放到进入电场由动能定理可得
0
2mg(L+)+|q |EL=×2mv2-0,解得v=
B 0 0
(2)从释放到小球B第一次下落时不穿出电场下边界,由动能定理可得
2mg(H+)+|q |EH-q E(H-L)=0-0,解得H=3.5L。
B A
第 5 课时 带电粒子在电场中的偏转
例1 AD [粒子的轨迹向上,则所受的静电力向上,与电场方向相同,所以该粒子带正电。
粒子从P到Q,静电力做正功为W=qU,则粒子的电势能减少了qU,Q点的电势为零,则
知带电粒子在P点的电势能为Uq,故A正确,B错误;设带电粒子在P点时的速度为v ,
0
以垂直于电场线为x轴,平行于电场线为y轴,由类平抛运动的规律和几何知识求得在Q点
时粒子在y轴方向的分速度为v=v ,粒子在y轴方向上的平均速度为 =,设粒子在y轴方
y 0 y
向上的位移为y ,粒子在电场中的运动时间为t,则竖直方向有y =t=,水平方向有d=
0 0 yvt,可得y=,所以电场强度为E=,联立得E==,故C错误,D正确。]
0 0
例2 (1) (2)
(3)2
解析 (1)质子在加速电场中做加速直线运动,由动能定理有
eU=mv2-0,解得v=
1 1
(2)由题意知,质子在竖直方向做初速度为零的加速直线运动,在水平方向做速度大小为的
匀速直线运动,设偏转电场的电场强度为E,竖直方向有eE=ma,2L=at2,v=at
y
水平方向有2L=vt,质子离开偏转电场时速度为v=,解得v=
1 2 2
(3)若偏转电场的电场强度大小变为原来的三分之一,由之前的分析可知,其竖直方向的加
速度大小也变为原来的三分之一,有a=3a′
假设质子从PQ边射出,则质子在竖直方向上依然做匀加速直线运动,有 2L=a′t2,所以
1
有t =t,则该段时间内质子在水平方向运动的距离为 x′=vt ,有x′=2L>3L,由上述分
1 11
析可知,质子出电场时不是从电场下端离开,设其离开电场时竖直方向的速度为v ,时间
y1
为t ,竖直方向有v =a′t ,水平方向仍然以v 做匀速直线运动,有3L=vt ,质子离开电
2 y1 2 1 12
场的速度大小为v==2。
3
例3 A [U 和U 均为正值,两偏转电极的电场强度方向分别由 X指向X′,由Y指
XX′ YY′
向Y′,电子带负电,所受静电力方向与电场强度方向相反,所以分别向X、Y方向偏转,
可知A正确。]
例4 B [根据qU =mv2,粒子离开加速器时速度为v =,故A错误;粒子在左侧平移器
0 0 0
电场中的偏移量为y =at2,又q=ma,L=vt,得y =,故B正确;根据类平抛运动的特点
1 0 1
和对称性,粒子在两平移器之间做匀速直线运动,它的轨迹延长线分别过左侧平移器下方平
行板和右侧平移器上方平行板中点,根据几何关系可知Δd=L,故C错误;由上述分析可得
y =,当加速电压增大时,粒子进入平移器的速度增大,粒子在平移器中竖直方向偏移量变
1
小,粒子可以离开平移器,位置比原来靠下,故D错误。]
例5 C [设OP=L,小球从O到P水平方向做匀减速运动,到达P点时水平速度为零,竖
直方向做自由落体运动,则水平方向Lcos 60°=t,竖直方向Lsin 60°=gt2,解得t=,选项C
正确;水平方向受静电力F=ma=m=,小球所受的合外力是F 与mg的合力,可知合外力
1 1
的大小F==mg,选项A、B错误;小球通过P点时的速度大小v =gt=v ,则动能E =
P 0 kP
mv 2=mv2,选项D错误。]
P 0
例6 (1) (2)2m(v2+g2t2)
0
解析 (1)设电场强度的大小为E,小球B运动的加速度为a。根据牛顿第二定律、运动学公
式和题给条件,
有mg+qE=ma①a()2=gt2②
解得E=③
(2)设B从O点发射时的速度为v ,到达P点时的动能为E ,O、P两点的高度差为h,根据
1 k
动能定理有
mgh+qEh=E-mv2④
k 1
且有v·=vt⑤
1 0
h=gt2⑥
联立③④⑤⑥式得E=2m(v2+g2t2)。
k 0
第 6 课时 专题强化:带电粒子在交变电场中的运动
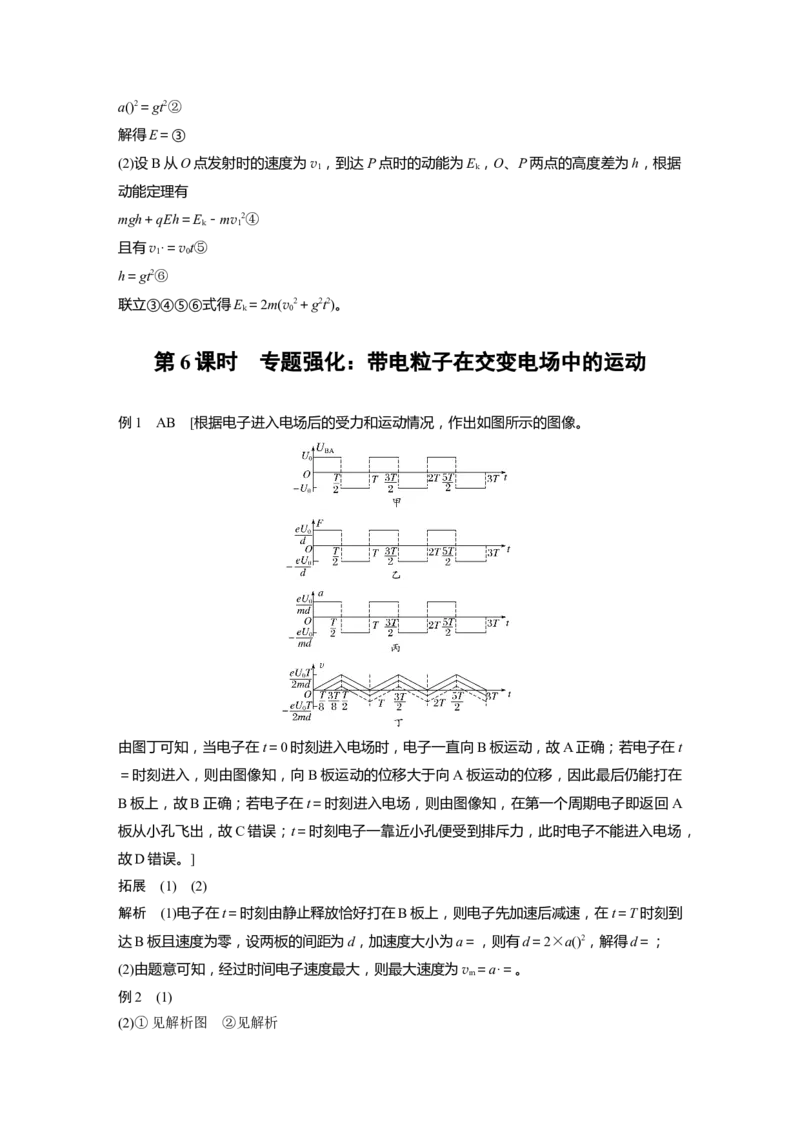
例1 AB [根据电子进入电场后的受力和运动情况,作出如图所示的图像。
由图丁可知,当电子在t=0时刻进入电场时,电子一直向B板运动,故A正确;若电子在t
=时刻进入,则由图像知,向B板运动的位移大于向A板运动的位移,因此最后仍能打在
B板上,故B正确;若电子在t=时刻进入电场,则由图像知,在第一个周期电子即返回 A
板从小孔飞出,故C错误;t=时刻电子一靠近小孔便受到排斥力,此时电子不能进入电场,
故D错误。]
拓展 (1) (2)
解析 (1)电子在t=时刻由静止释放恰好打在B板上,则电子先加速后减速,在t=T时刻到
达B板且速度为零,设两板的间距为d,加速度大小为a=,则有d=2×a()2,解得d=;
(2)由题意可知,经过时间电子速度最大,则最大速度为v =a·=。
m
例2 (1)
(2)①见解析图 ②见解析③d=(n=0,1,2,3,…)
(3)L=nvT(n=1,2,3,…)
0
d≥
解析 (1)根据题意可知,粒子在电场中,水平方向上做匀速直线运动,若粒子能够射出电
场,则粒子在电场中的运动时间为t=
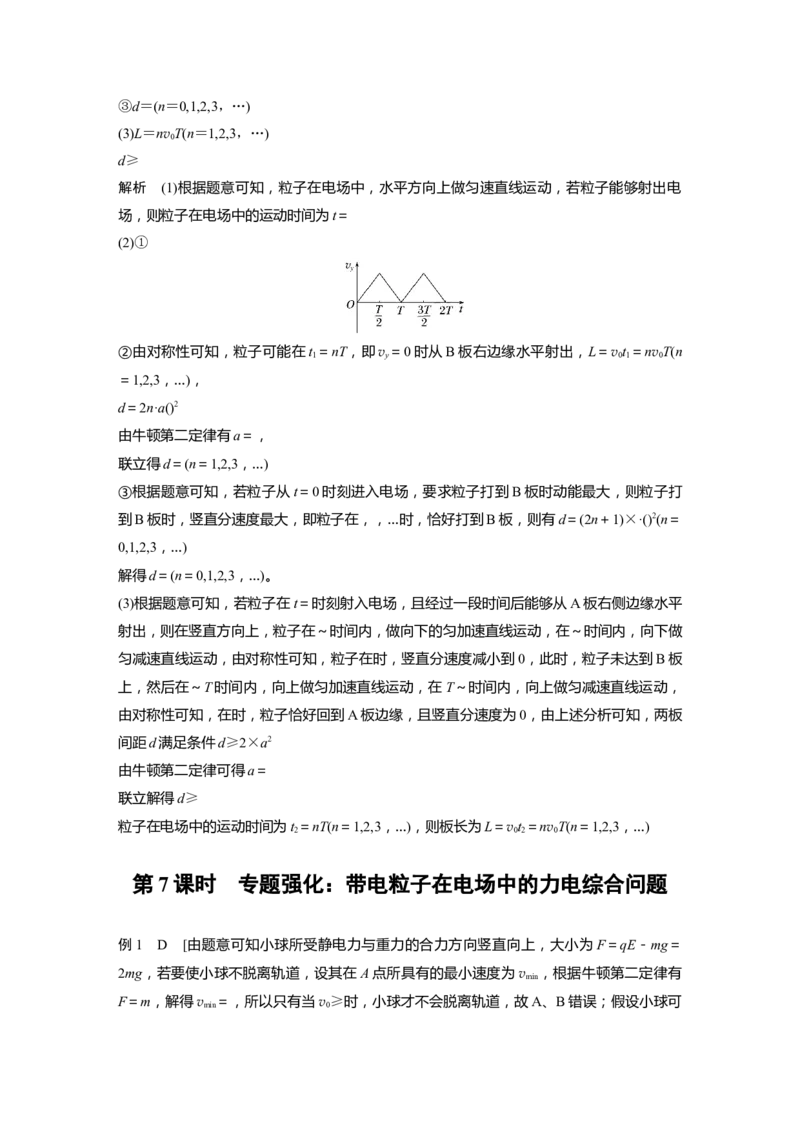
(2)①
②由对称性可知,粒子可能在t =nT,即v=0时从B板右边缘水平射出,L=vt =nvT(n
1 y 01 0
=1,2,3,…),
d=2n·a()2
由牛顿第二定律有a=,
联立得d=(n=1,2,3,…)
③根据题意可知,若粒子从t=0时刻进入电场,要求粒子打到B板时动能最大,则粒子打
到B板时,竖直分速度最大,即粒子在,,…时,恰好打到B板,则有d=(2n+1)×·()2(n=
0,1,2,3,…)
解得d=(n=0,1,2,3,…)。
(3)根据题意可知,若粒子在t=时刻射入电场,且经过一段时间后能够从A板右侧边缘水平
射出,则在竖直方向上,粒子在~时间内,做向下的匀加速直线运动,在~时间内,向下做
匀减速直线运动,由对称性可知,粒子在时,竖直分速度减小到0,此时,粒子未达到B板
上,然后在~T时间内,向上做匀加速直线运动,在T~时间内,向上做匀减速直线运动,
由对称性可知,在时,粒子恰好回到A板边缘,且竖直分速度为0,由上述分析可知,两板
间距d满足条件d≥2×a2
由牛顿第二定律可得a=
联立解得d≥
粒子在电场中的运动时间为t=nT(n=1,2,3,…),则板长为L=vt=nvT(n=1,2,3,…)
2 02 0
第 7 课时 专题强化:带电粒子在电场中的力电综合问题
例1 D [由题意可知小球所受静电力与重力的合力方向竖直向上,大小为F=qE-mg=
2mg,若要使小球不脱离轨道,设其在A点所具有的最小速度为v ,根据牛顿第二定律有
min
F=m,解得v =,所以只有当v≥时,小球才不会脱离轨道,故A、B错误;假设小球可
min 0以在轨道中做完整的圆周运动,在C点的速度大小为v ,根据动能定理有mv2-mv2=
1 1 0
F·2R,在A、C点小球所受轨道的支持力大小分别为F 和F ,根据牛顿第二定律有F +F=
0 1 0
m,F -F=m,联立以上三式解得ΔF=F -F =6F=12mg,根据牛顿第三定律可知小球在
1 1 0
A、C两点对轨道的压力差等于12mg,与v 的大小无关,故C错误;若将小球无初速度从D
0
点释放,由于F向上,所以小球一定能沿DC轨道经过C点,故D正确。]
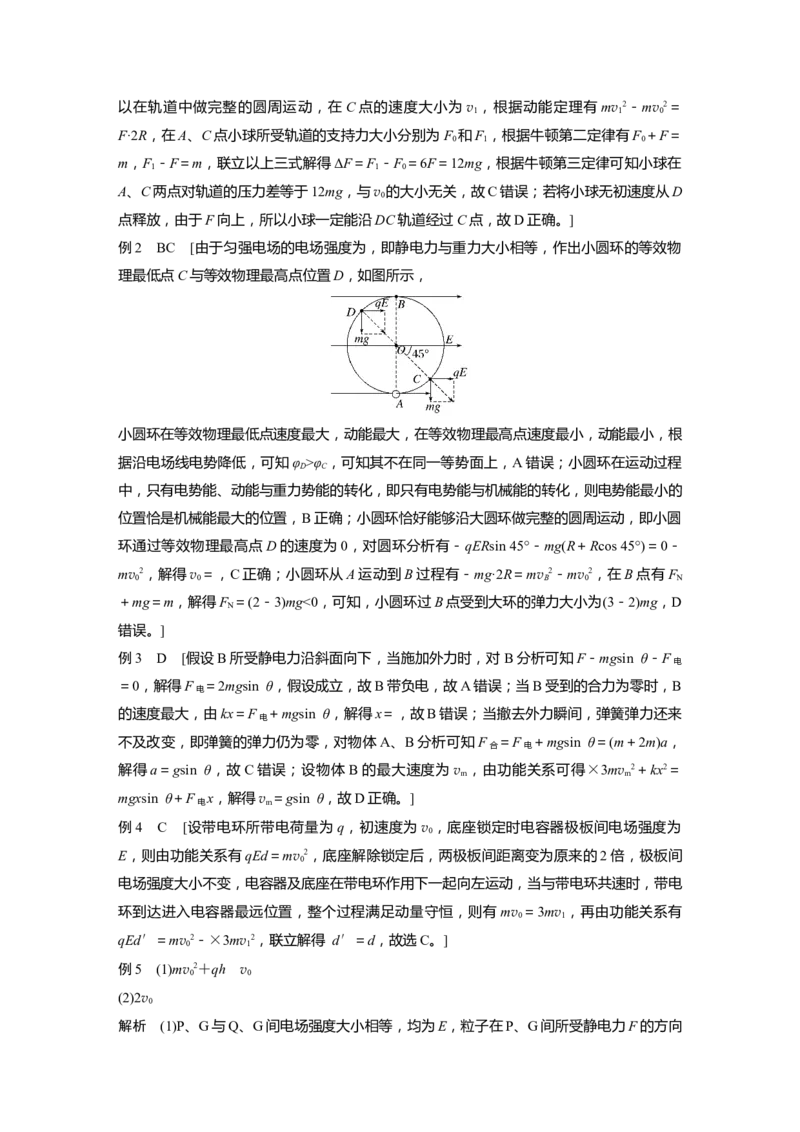
例2 BC [由于匀强电场的电场强度为,即静电力与重力大小相等,作出小圆环的等效物
理最低点C与等效物理最高点位置D,如图所示,
小圆环在等效物理最低点速度最大,动能最大,在等效物理最高点速度最小,动能最小,根
据沿电场线电势降低,可知φ >φ ,可知其不在同一等势面上,A错误;小圆环在运动过程
D C
中,只有电势能、动能与重力势能的转化,即只有电势能与机械能的转化,则电势能最小的
位置恰是机械能最大的位置,B正确;小圆环恰好能够沿大圆环做完整的圆周运动,即小圆
环通过等效物理最高点D的速度为0,对圆环分析有-qERsin 45°-mg(R+Rcos 45°)=0-
mv2,解得v =,C正确;小圆环从A运动到B过程有-mg·2R=mv 2-mv2,在B点有F
0 0 B 0 N
+mg=m,解得F =(2-3)mg<0,可知,小圆环过B点受到大环的弹力大小为(3-2)mg,D
N
错误。]
例3 D [假设B所受静电力沿斜面向下,当施加外力时,对 B分析可知F-mgsin θ-F
电
=0,解得F =2mgsin θ,假设成立,故B带负电,故A错误;当B受到的合力为零时,B
电
的速度最大,由kx=F +mgsin θ,解得x=,故B错误;当撤去外力瞬间,弹簧弹力还来
电
不及改变,即弹簧的弹力仍为零,对物体A、B分析可知F =F +mgsin θ=(m+2m)a,
合 电
解得a=gsin θ,故C错误;设物体B的最大速度为v ,由功能关系可得×3mv 2+kx2=
m m
mgxsin θ+F x,解得v =gsin θ,故D正确。]
电 m
例4 C [设带电环所带电荷量为q,初速度为v ,底座锁定时电容器极板间电场强度为
0
E,则由功能关系有qEd=mv2,底座解除锁定后,两极板间距离变为原来的2倍,极板间
0
电场强度大小不变,电容器及底座在带电环作用下一起向左运动,当与带电环共速时,带电
环到达进入电容器最远位置,整个过程满足动量守恒,则有 mv =3mv ,再由功能关系有
0 1
qEd′=mv2-×3mv2,联立解得 d′=d,故选C。]
0 1
例5 (1)mv2+qh v
0 0
(2)2v
0
解析 (1)P、G与Q、G间电场强度大小相等,均为E,粒子在P、G间所受静电力F的方向竖直向下,设粒子的加速度大小为a,有E=①
F=qE=ma②
设粒子第一次到达G时动能为E,由动能定理有qEh=E-mv2③
k k 0
设粒子第一次到达G时所用的时间为t,粒子在水平方向的位移为l,则有h=at2④
l=vt⑤
0
联立①②③④⑤式解得E=mv2+qh,l=v
k 0 0
(2)若粒子穿过G一次就从电场的右侧飞出,则金属板的长度最短。由对称性知,此时金属
板的长度为L=2l=2v。
0
第十章 电路及其应用
第 1 课时 电路的基本概念及规律
例1 C [由电流的定义式可知,I===neSv,由欧姆定律可得,U=IR=neSv·ρ=ρneLv,
又电场强度大小为E=,故E=ρnev,选项C正确。]
例2 BC [该大气层的平均漏电电流约为I== A=1.8×103 A,该大气层的等效电阻为R
== Ω≈167 Ω,故A错误,B正确;根据R=ρ可得,该大气层的平均电阻率约为ρ==
Ω·m≈1.7×1012 Ω·m,故C正确,D错误。]
例3 C [I-U图像上的点与坐标原点连线的斜率等于电阻的倒数,由题图可知,电阻a的
图像上的点与坐标原点连线的斜率越来越大,故电阻 a的阻值随电流的增大而减小,故选项
A错误;I-U图像上的点与坐标原点连线的斜率表示电阻的倒数,但是由于横、纵坐标轴
的长度单位不同,则不能由R==1 Ω求解电阻b的阻值,只能通过R== Ω=2 Ω求解,
选项B错误;根据R=可知在两图线交点处,电阻a的阻值等于电阻b的阻值,选项C正确,
D错误。]
例4 B [S断开时,R 与R 串联,两端电压之比为U∶U =R∶R =1∶5,A错误;S闭
1 2 1 2 1 2
合时,R 与R 两端的电压之比为U′∶U′=R∶=2∶5,B正确;S闭合时,通过R 与
1 2 1 2 1 2
R 的电流之比为1∶1,C错误;S闭合时,R 与R 的功率分别为P =I2R =2I2,P =()2R =
3 1 2 1 1 2 2
I2,则P∶P=4∶5,D错误。]
1 2
例5 20 80 50
解析 使用OA接线柱时,量程为0~3 A,则有I =3 A=I+
OA g
使用OB接线柱时,量程为0~0.6 A,
则有I =0.6 A=I+
OB g其中I=0.3 A,R=100 Ω
g g
联立解得R=20 Ω,R=80 Ω
1 2
使用OC接线柱时,量程为0~60 V,
则有U =60 V=I +I R,解得R=50 Ω。
OC OB OB 3 3
例6 A [灯泡都正常发光,根据电路结构,两电路总电流关系为 I =2I ,电路总功率分别
1 2
为UI=P+2P ,UI=P+2P ,得P-P=2UI-UI>0,即P>P,故选A。]
1 1 1 L 2 2 2 L 1 2 1 2 2 2 1 2
例7 D [设每秒出水量为m,根据题意有m=ρV,V=Svt=Sv,联立解得S=7.5×10-4
m2,故A错误;以每秒内流出的水为研究对象,每秒内水流机械能增加 ΔE=mgh+mv2,h
=6 m+0.45 m=6.45 m,解得ΔE=217.5 J,故B错误;根据题意,水泵的输入功率为P
入
==== W=290 W,故C错误;水泵的输入功率等于电动机的输出功率,对电动机有P
总
=P +I2r,P =UI,联立可得r= Ω,故D正确。]
入 总
第 2 课时 闭合电路欧姆定律及应用
例1 C [外电路断开时的路端电压为3.0 V,则电池的电动势E=3.0 V。当外电路接上阻
值为8.0 Ω的负载电阻后路端电压降为2.4 V,由U=IR,U=E-Ir,得r=2.0 Ω,故C正
确。]
例2 C [闭合的圆环接入电路中,接触点O点与P间电阻丝并联接入到电路中,在滑动触
头P缓慢地从m点开始经n点移到q点的过程中,圆环接入电路中的总电阻先变大后变小,
故电路中的总电阻先变大后变小,则干路电流I先减小后增大,灯L 先变暗后变亮,根据闭
2
合电路欧姆定律U=E-Ir,可知路端电压即电压表示数先变大后变小,圆环与灯 L 并联电
1
路的电压U =U-U ,U 与U 之和等于外电路电压,U 先减小后增大,故U 先增大后
并 2 2 并 2 并
减小,L 先变亮后变暗,I 先增大后减小,流过电流表的电流I =I-I ,I 先减小后增大,
1 1 A 1 A
故A、B错误,C正确;圆环与灯L 并联的电压先增大后减小,则电容器板间的电压先增大
1
后减小,由Q=CU,可得电容器所带的电荷量先增多后减少,故D错误。]
例3 D [开关S闭合时的等效电路图如图甲所示,电容器C两端电压等于R 两端电压
3
U ,已知电路总电阻R=+r=4 Ω,由闭合电路欧姆定律可知干路电流I==1.5 A,路端电
3
压U=E-Ir=4.5 V,则U =U=1.8 V,此时电容器所带电荷量Q =CU =3.6×10-6 C,且
3 1 3
上极板带负电,下极板带正电,故A、B错误;
开关S断开时的等效电路图如图乙所示,稳定后电容器C两端电压等于R 两端电压U ,此
2 2
时U=R=3 V,电容器所带电荷量Q=CU=6×10-6 C,且上极板带正电,下极板带负电,
2 2 2 2
故通过R 的电荷量Q=Q+Q=9.6×10-6 C,故C错误,D正确。]
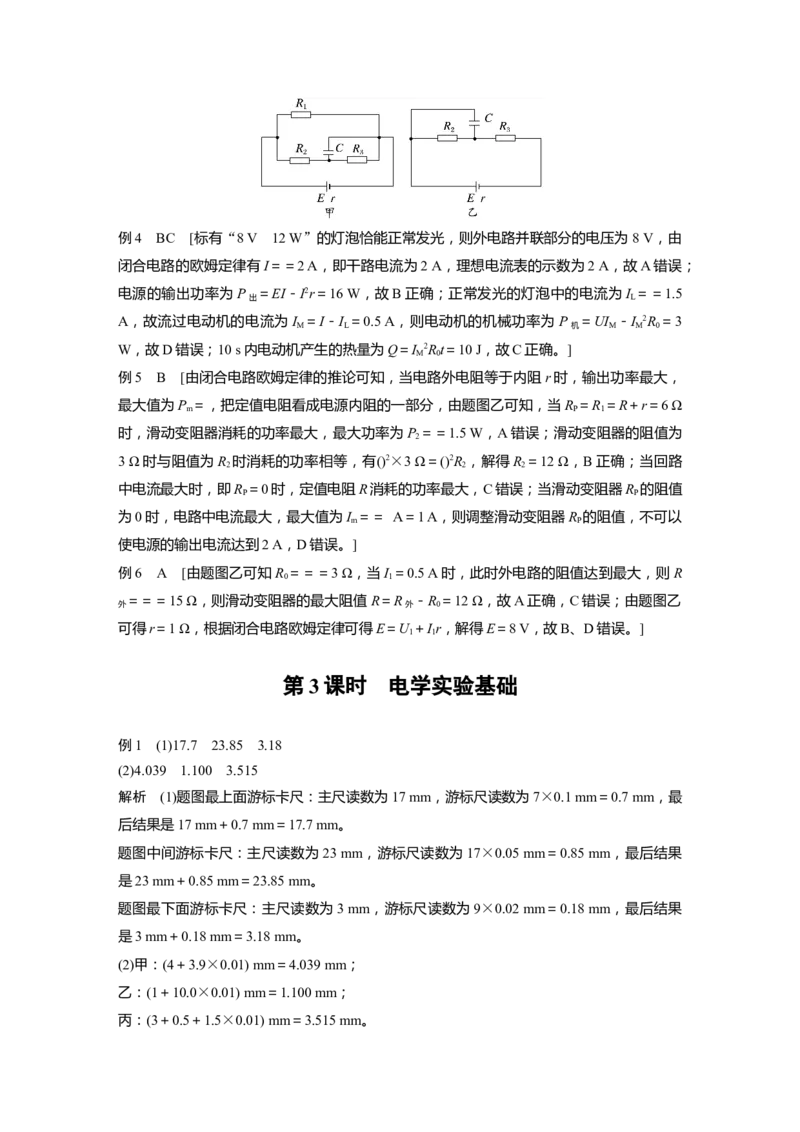
0 1 2例4 BC [标有“8 V 12 W”的灯泡恰能正常发光,则外电路并联部分的电压为8 V,由
闭合电路的欧姆定律有I==2 A,即干路电流为2 A,理想电流表的示数为2 A,故A错误;
电源的输出功率为P =EI-I2r=16 W,故B正确;正常发光的灯泡中的电流为I ==1.5
出 L
A,故流过电动机的电流为I =I-I =0.5 A,则电动机的机械功率为P =UI -I 2R =3
M L 机 M M 0
W,故D错误;10 s内电动机产生的热量为Q=I 2Rt=10 J,故C正确。]
M 0
例5 B [由闭合电路欧姆定律的推论可知,当电路外电阻等于内阻 r时,输出功率最大,
最大值为P =,把定值电阻看成电源内阻的一部分,由题图乙可知,当R =R =R+r=6 Ω
m P 1
时,滑动变阻器消耗的功率最大,最大功率为P ==1.5 W,A错误;滑动变阻器的阻值为
2
3 Ω时与阻值为R 时消耗的功率相等,有()2×3 Ω=()2R ,解得R =12 Ω,B正确;当回路
2 2 2
中电流最大时,即R =0时,定值电阻R消耗的功率最大,C错误;当滑动变阻器R 的阻值
P P
为0时,电路中电流最大,最大值为I == A=1 A,则调整滑动变阻器R 的阻值,不可以
m P
使电源的输出电流达到2 A,D错误。]
例6 A [由题图乙可知R ===3 Ω,当I =0.5 A时,此时外电路的阻值达到最大,则R
0 1
===15 Ω,则滑动变阻器的最大阻值R=R -R =12 Ω,故A正确,C错误;由题图乙
外 外 0
可得r=1 Ω,根据闭合电路欧姆定律可得E=U+Ir,解得E=8 V,故B、D错误。]
1 1
第 3 课时 电学实验基础
例1 (1)17.7 23.85 3.18
(2)4.039 1.100 3.515
解析 (1)题图最上面游标卡尺:主尺读数为17 mm,游标尺读数为7×0.1 mm=0.7 mm,最
后结果是17 mm+0.7 mm=17.7 mm。
题图中间游标卡尺:主尺读数为23 mm,游标尺读数为17×0.05 mm=0.85 mm,最后结果
是23 mm+0.85 mm=23.85 mm。
题图最下面游标卡尺:主尺读数为3 mm,游标尺读数为9×0.02 mm=0.18 mm,最后结果
是3 mm+0.18 mm=3.18 mm。
(2)甲:(4+3.9×0.01) mm=4.039 mm;
乙:(1+10.0×0.01) mm=1.100 mm;
丙:(3+0.5+1.5×0.01) mm=3.515 mm。例2 (1)0.02 0.44 0.1 2.20
(2)0.1 1.70 0.5 8.5 (3)1 987
将“×1 k”挡旋钮调到2,再将“×100”挡旋钮调到0 0~19 998 Ω
解析 (1)电流表使用0.6 A量程时,刻度盘上的每一小格为0.02 A,表针示数为0.44 A;当
使用3 A量程时,每一小格为0.1 A,表针示数为2.20 A。
(2)电压表使用3 V量程时,每小格表示0.1 V,表针示数为1.70 V;使用15 V量程时,每小
格表示0.5 V,表针示数为8.5 V。
(3)电阻为1 987 Ω。最简单的操作方法是先将“×1 k”挡旋钮调到2,再将“×100”挡旋
钮调到0。每个电阻箱的最大阻值是9 999 Ω,用两个这样的电阻箱串联可得到的最大电阻
是2×9 999 Ω=19 998 Ω,故用两个这样的电阻箱,可得到的电阻范围为0~19 998 Ω。
例3 (1)7 (2)B D (3)AC
解析 (1)电阻大小读数为7×1 Ω=7 Ω
(2)由于同学们使用学生电源(4 V),则为减小误差,电压表应选择V ,故选B。整个回路中
2
的最大电流为I=≈0.57 A,则电流表应选择A,故选D。
2
(3)电压表分流属于系统误差,故A正确;为保护电路,实验开始前滑动变阻器滑片应该调
到a端,故B错误;如题图乙所示的电路为分压式电路,可以通过调节滑片使电压表示数为
0,故C正确;多组实验可以减小偶然误差,故D错误。
例4 (1)A D (2)内接 分压 见解析图 (3)-r
A1
解析 (1)如果选A 电流表,A 满偏时U =I R=0.002×15 V=0.03 V,远小于给出电压表
2 2 V A x
的量程,故选A,在电流表A 达到满偏时,电压表示数约为2.7 V,电压表选择D,也接近
1
满偏,这样读数引起的误差较小。
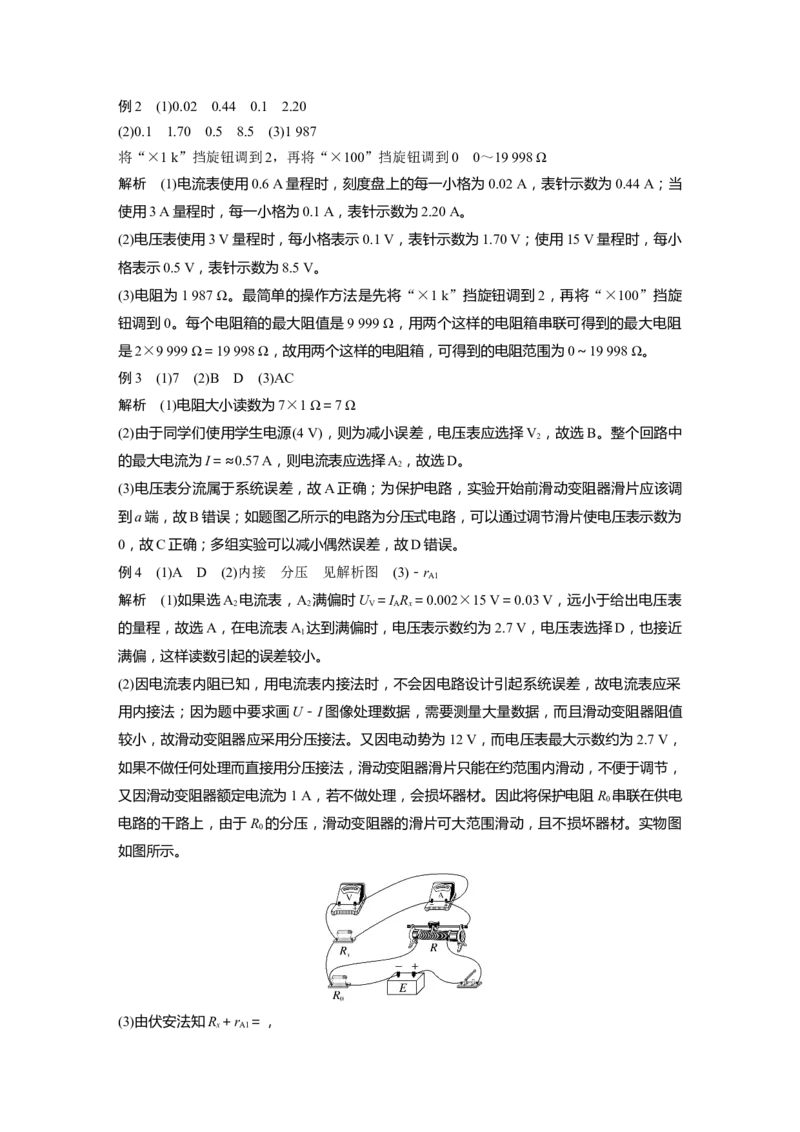
(2)因电流表内阻已知,用电流表内接法时,不会因电路设计引起系统误差,故电流表应采
用内接法;因为题中要求画U-I图像处理数据,需要测量大量数据,而且滑动变阻器阻值
较小,故滑动变阻器应采用分压接法。又因电动势为12 V,而电压表最大示数约为2.7 V,
如果不做任何处理而直接用分压接法,滑动变阻器滑片只能在约范围内滑动,不便于调节,
又因滑动变阻器额定电流为1 A,若不做处理,会损坏器材。因此将保护电阻R 串联在供电
0
电路的干路上,由于R 的分压,滑动变阻器的滑片可大范围滑动,且不损坏器材。实物图
0
如图所示。
(3)由伏安法知R+r =,
x A1得R=-r 。
x A1
第 4 课时 实验十一:导体电阻率的测量
例1 (1)BC CD (2)见解析图
(3)0.4 (4)电流I
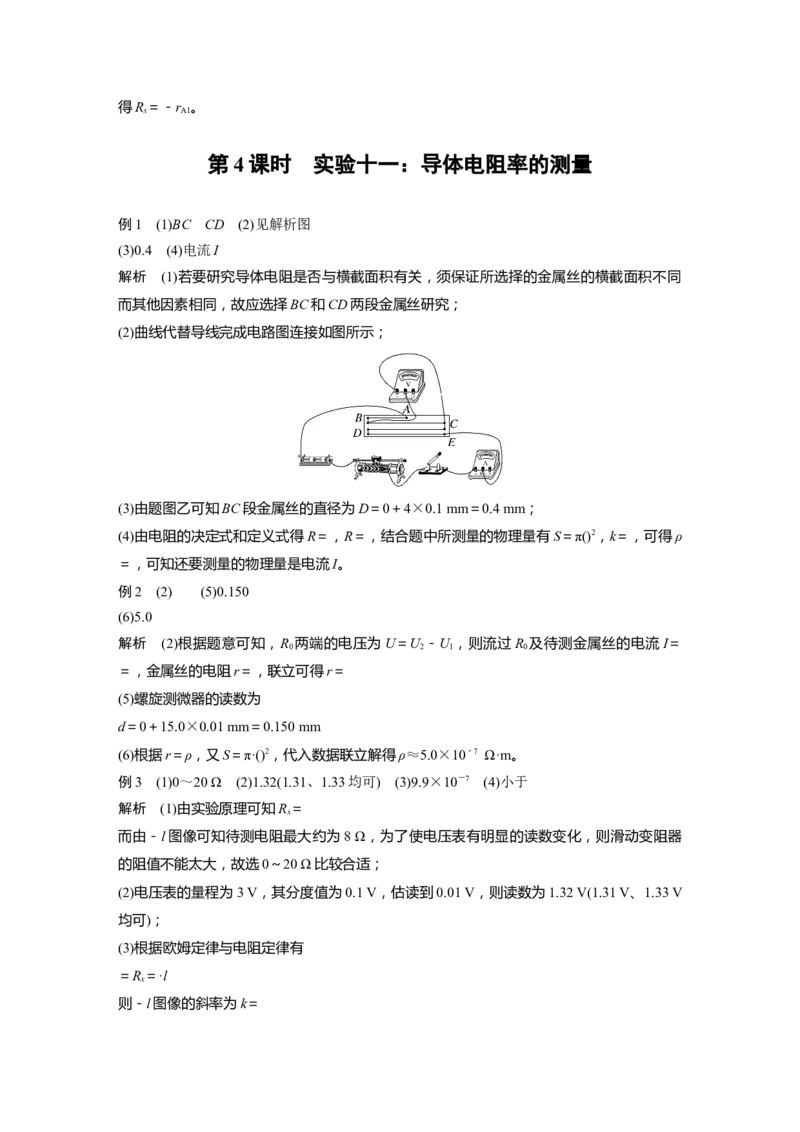
解析 (1)若要研究导体电阻是否与横截面积有关,须保证所选择的金属丝的横截面积不同
而其他因素相同,故应选择BC和CD两段金属丝研究;
(2)曲线代替导线完成电路图连接如图所示;
(3)由题图乙可知BC段金属丝的直径为D=0+4×0.1 mm=0.4 mm;
(4)由电阻的决定式和定义式得R=,R=,结合题中所测量的物理量有S=π()2,k=,可得ρ
=,可知还要测量的物理量是电流I。
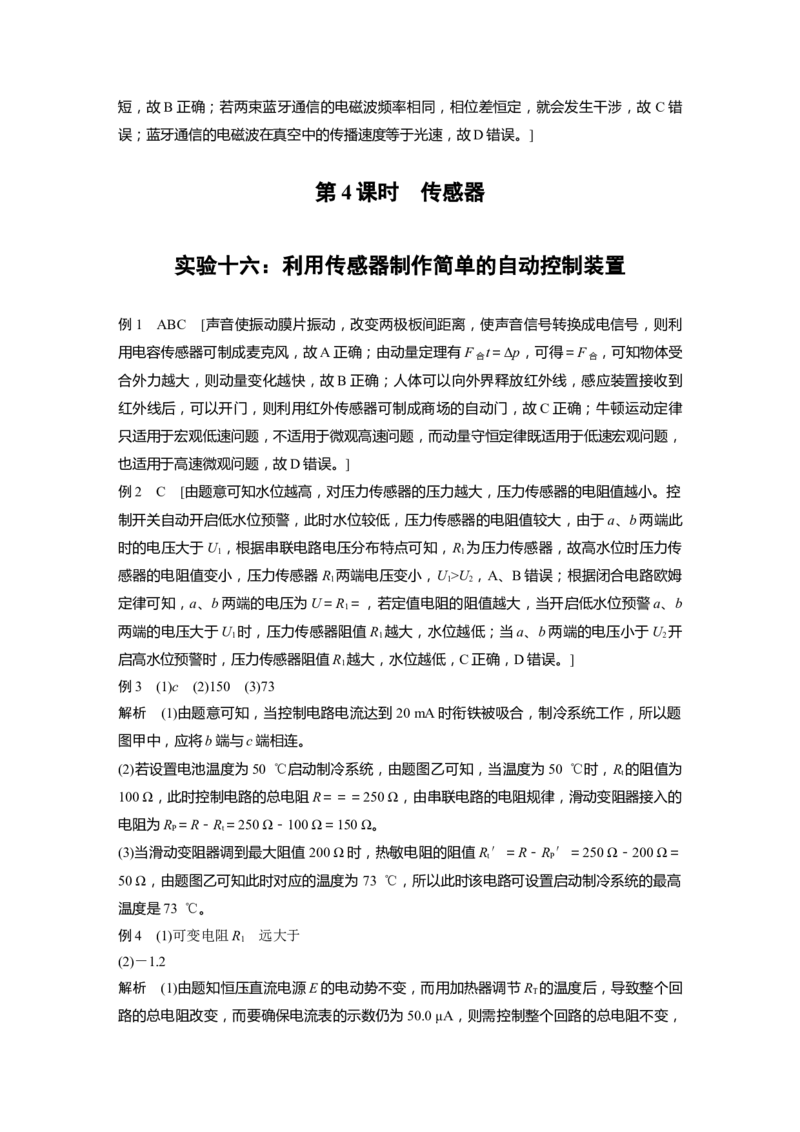
例2 (2) (5)0.150
(6)5.0
解析 (2)根据题意可知,R 两端的电压为U=U -U ,则流过R 及待测金属丝的电流I=
0 2 1 0
=,金属丝的电阻r=,联立可得r=
(5)螺旋测微器的读数为
d=0+15.0×0.01 mm=0.150 mm
(6)根据r=ρ,又S=π·()2,代入数据联立解得ρ≈5.0×10-7 Ω·m。
例3 (1)0~20 Ω (2)1.32(1.31、1.33均可) (3)9.9×10-7 (4)小于
解析 (1)由实验原理可知R=
x
而由-l图像可知待测电阻最大约为8 Ω,为了使电压表有明显的读数变化,则滑动变阻器
的阻值不能太大,故选0~20 Ω比较合适;
(2)电压表的量程为3 V,其分度值为0.1 V,估读到0.01 V,则读数为1.32 V(1.31 V、1.33 V
均可);
(3)根据欧姆定律与电阻定律有
=R=·l
x
则-l图像的斜率为k=可得合金丝甲的电阻率为
ρ=kS=×7.0×10-8 Ω·m
≈9.9×10-7 Ω·m
(4)另一根长度相同、材料相同的合金丝乙与合金丝甲并联后,电阻率不变,而横截面积变
为S′=S+S
乙
由图线b可得
S′== m2≈26×10-8 m2
解得S =S′-S=19×10-8 m2>S
乙
故合金丝甲的横截面积小于合金丝乙的横截面积。
例4 (1)0.800 (2)③ 右
(3)见解析图 5.0×10-7 0.20
解析 (1)螺旋测微器读数d=0.5 mm+30.0×0.01 mm=0.800 mm;
(2)按实物图转化为电路原理图如图
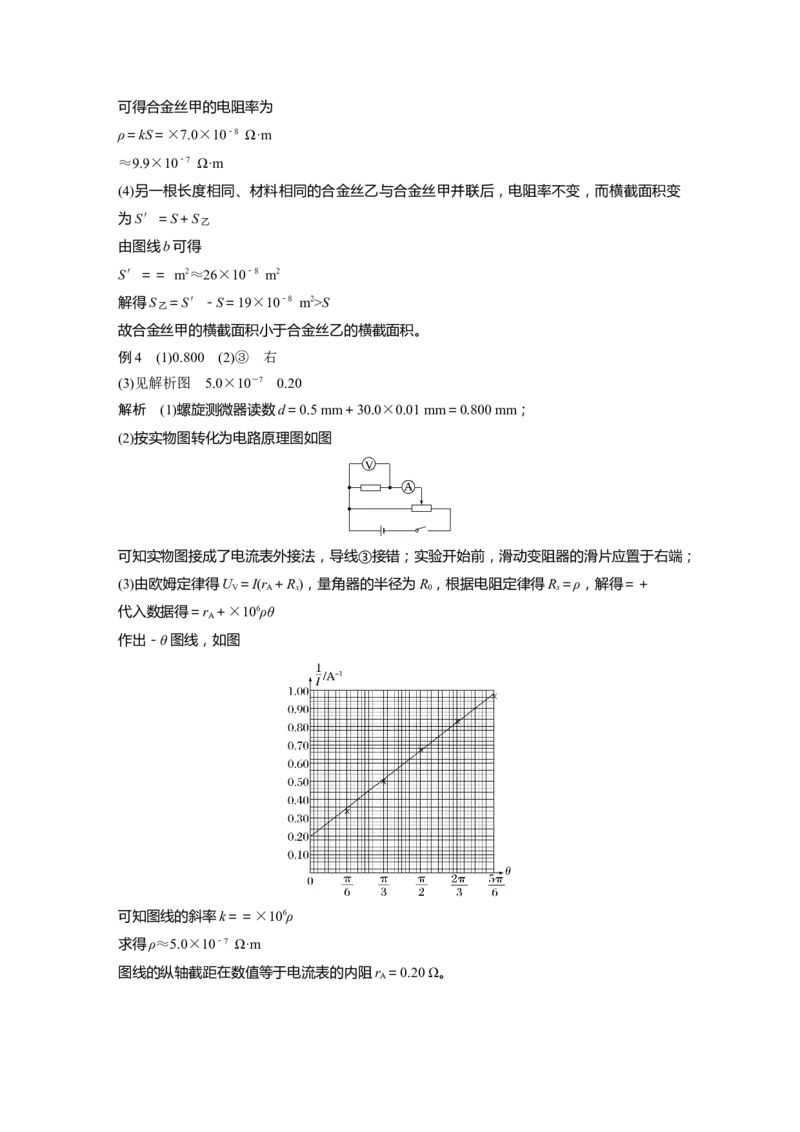
可知实物图接成了电流表外接法,导线③接错;实验开始前,滑动变阻器的滑片应置于右端;
(3)由欧姆定律得U =I(r +R),量角器的半径为R,根据电阻定律得R=ρ,解得=+
V A x 0 x
代入数据得=r +×106ρθ
A
作出-θ图线,如图
可知图线的斜率k==×106ρ
求得ρ≈5.0×10-7 Ω·m
图线的纵轴截距在数值等于电流表的内阻r =0.20 Ω。
A第 5 课时 实验十二:测量电源的电动势和内阻
例1 (1) B 1.20 (2)1.50 1.04
解析 (1)电压表测量的电压应为滑动变阻器接入电路中电阻丝两端的电压,开关应能控制
电路,所以导线a端应连接到B处;干电池电动势约为1.5 V,电压表选择0~3 V量程,分
度值为0.1 V,题图乙中电压表读数为1.20 V;
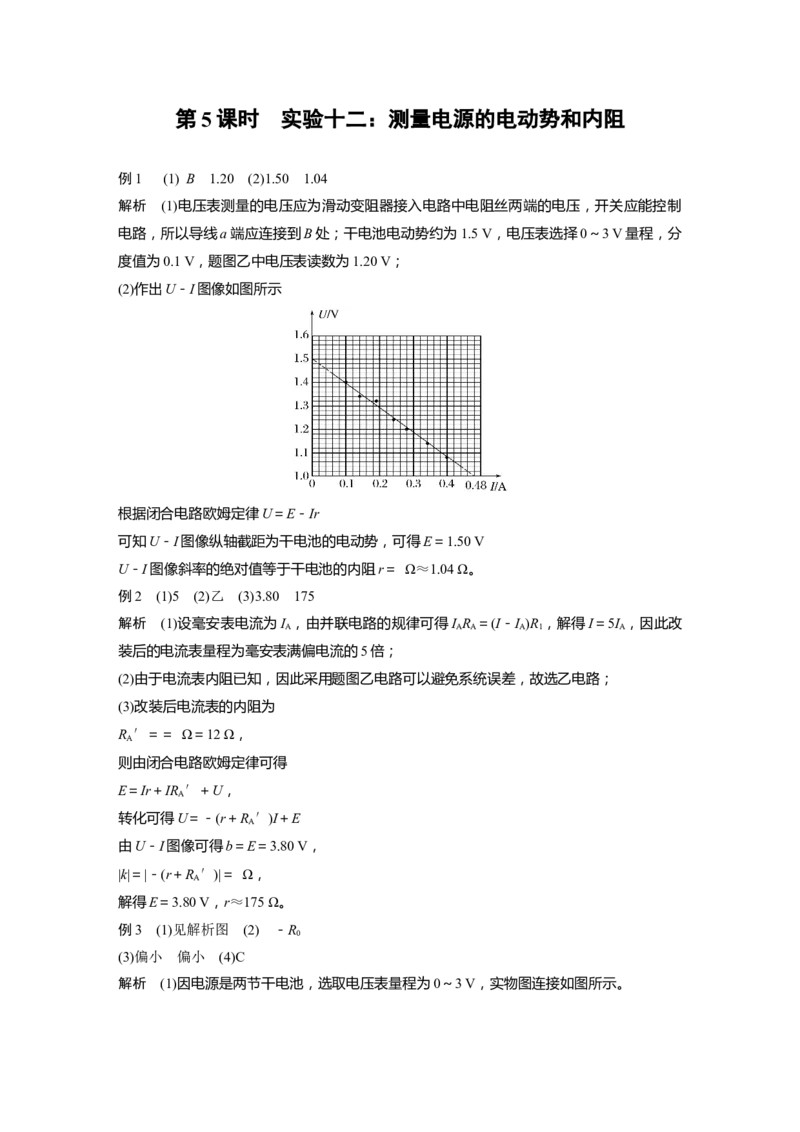
(2)作出U-I图像如图所示
根据闭合电路欧姆定律U=E-Ir
可知U-I图像纵轴截距为干电池的电动势,可得E=1.50 V
U-I图像斜率的绝对值等于干电池的内阻r= Ω≈1.04 Ω。
例2 (1)5 (2)乙 (3)3.80 175
解析 (1)设毫安表电流为I ,由并联电路的规律可得I R =(I-I )R ,解得I=5I ,因此改
A A A A 1 A
装后的电流表量程为毫安表满偏电流的5倍;
(2)由于电流表内阻已知,因此采用题图乙电路可以避免系统误差,故选乙电路;
(3)改装后电流表的内阻为
R ′== Ω=12 Ω,
A
则由闭合电路欧姆定律可得
E=Ir+IR ′+U,
A
转化可得U=-(r+R ′)I+E
A
由U-I图像可得b=E=3.80 V,
|k|=|-(r+R ′)|= Ω,
A
解得E=3.80 V,r≈175 Ω。
例3 (1)见解析图 (2) -R
0
(3)偏小 偏小 (4)C
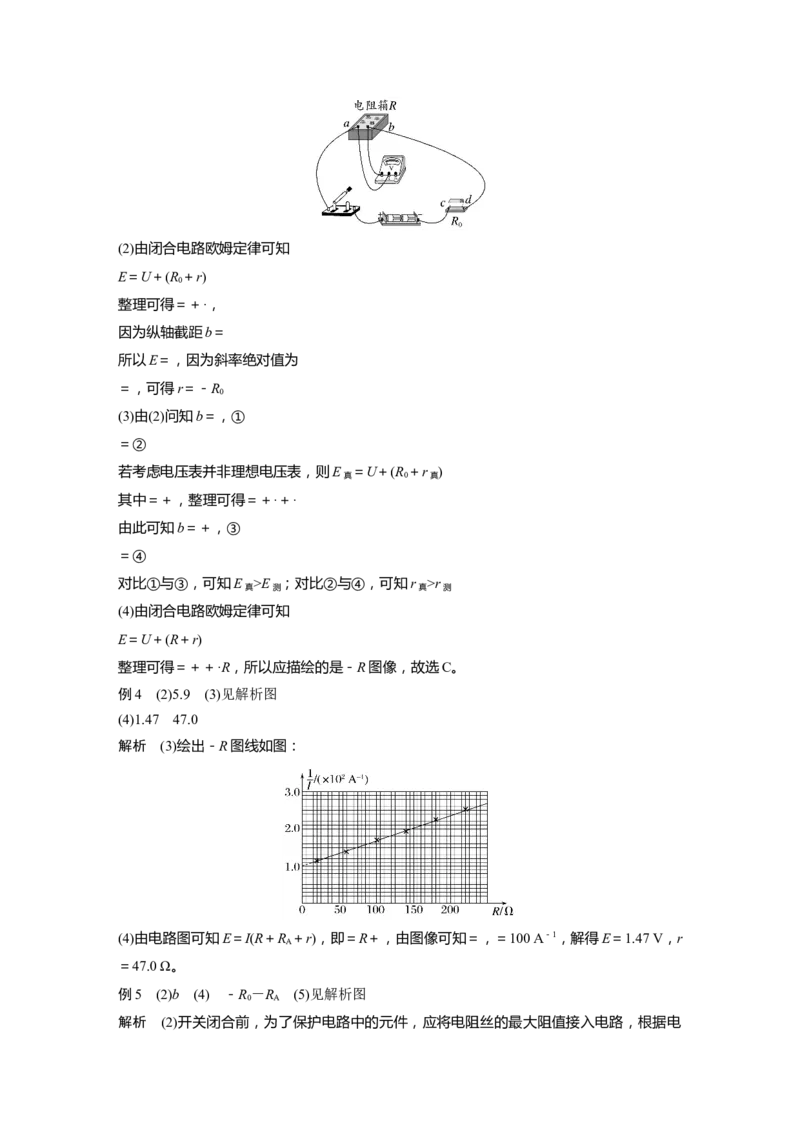
解析 (1)因电源是两节干电池,选取电压表量程为0~3 V,实物图连接如图所示。(2)由闭合电路欧姆定律可知
E=U+(R+r)
0
整理可得=+·,
因为纵轴截距b=
所以E=,因为斜率绝对值为
=,可得r=-R
0
(3)由(2)问知b=,①
=②
若考虑电压表并非理想电压表,则E =U+(R+r )
真 0 真
其中=+,整理可得=+·+·
由此可知b=+,③
=④
对比①与③,可知E >E ;对比②与④,可知r >r
真 测 真 测
(4)由闭合电路欧姆定律可知
E=U+(R+r)
整理可得=++·R,所以应描绘的是-R图像,故选C。
例4 (2)5.9 (3)见解析图
(4)1.47 47.0
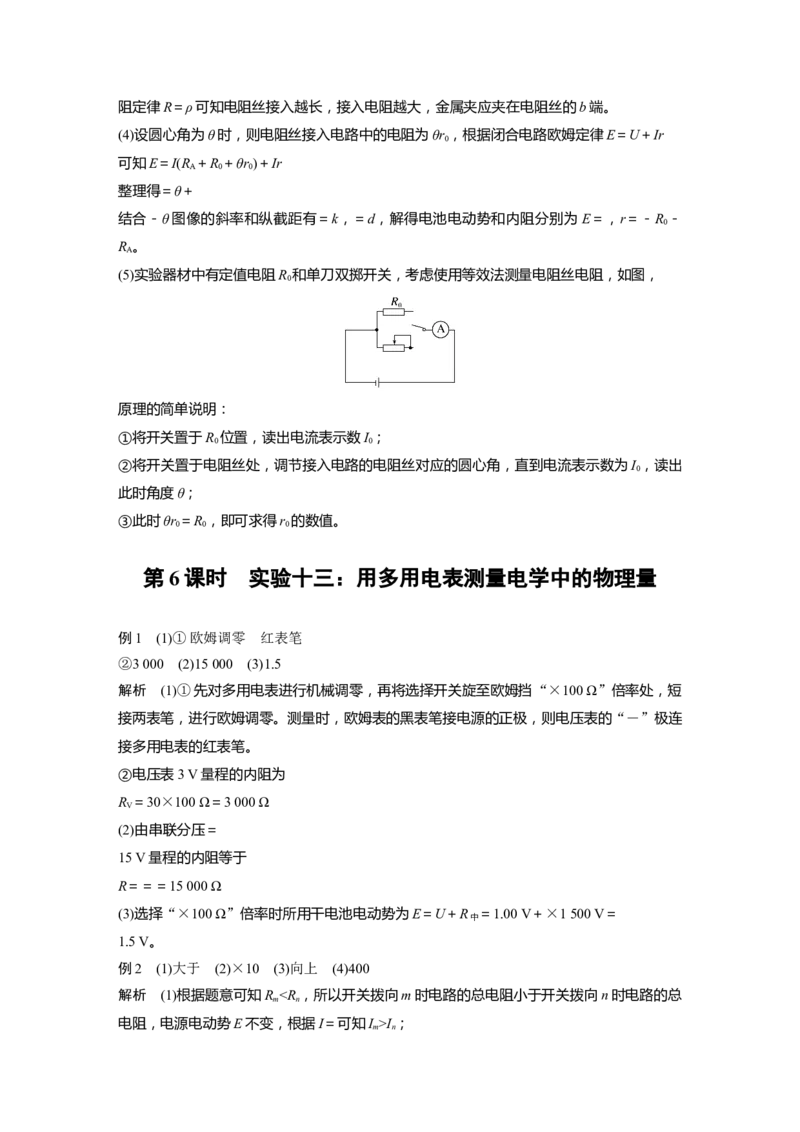
解析 (3)绘出-R图线如图:
(4)由电路图可知E=I(R+R +r),即=R+,由图像可知=,=100 A-1,解得E=1.47 V,r
A
=47.0 Ω。
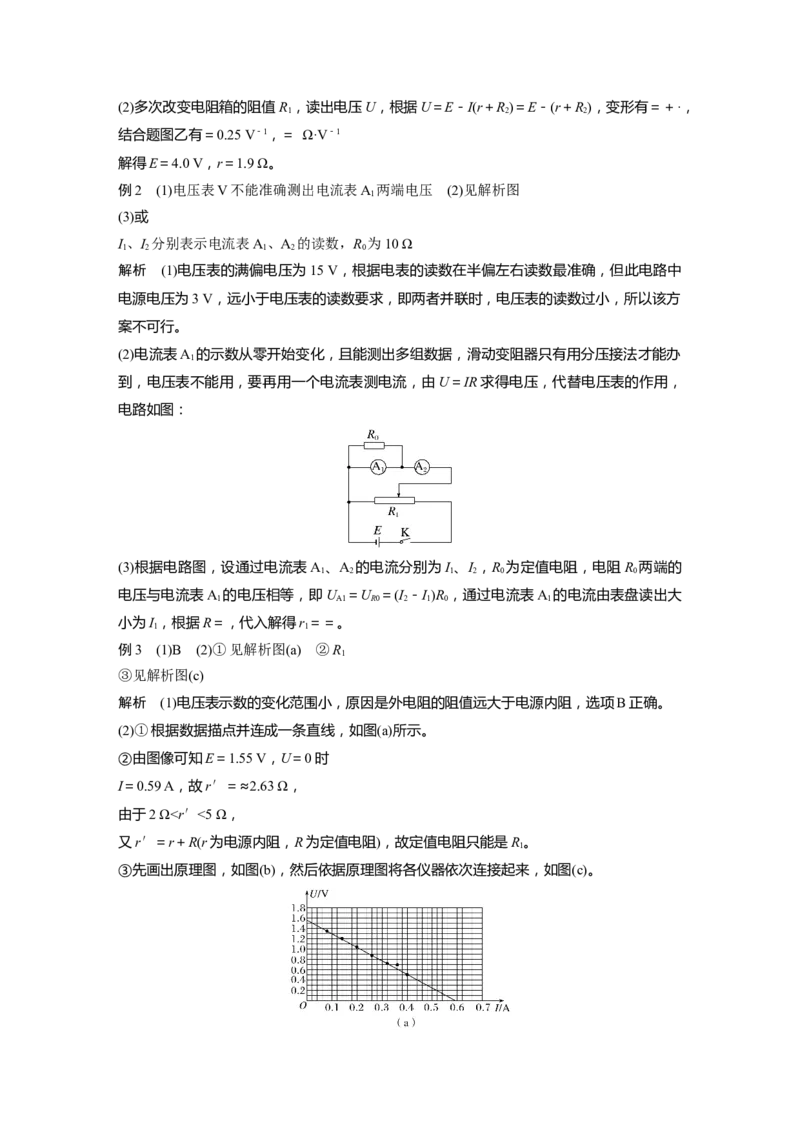
例5 (2)b (4) -R-R (5)见解析图
0 A
解析 (2)开关闭合前,为了保护电路中的元件,应将电阻丝的最大阻值接入电路,根据电阻定律R=ρ可知电阻丝接入越长,接入电阻越大,金属夹应夹在电阻丝的b端。
(4)设圆心角为θ时,则电阻丝接入电路中的电阻为θr,根据闭合电路欧姆定律E=U+Ir
0
可知E=I(R +R+θr)+Ir
A 0 0
整理得=θ+
结合-θ图像的斜率和纵截距有=k,=d,解得电池电动势和内阻分别为E=,r=-R -
0
R 。
A
(5)实验器材中有定值电阻R 和单刀双掷开关,考虑使用等效法测量电阻丝电阻,如图,
0
原理的简单说明:
①将开关置于R 位置,读出电流表示数I;
0 0
②将开关置于电阻丝处,调节接入电路的电阻丝对应的圆心角,直到电流表示数为I ,读出
0
此时角度θ;
③此时θr=R,即可求得r 的数值。
0 0 0
第 6 课时 实验十三:用多用电表测量电学中的物理量
例1 (1)①欧姆调零 红表笔
②3 000 (2)15 000 (3)1.5
解析 (1)①先对多用电表进行机械调零,再将选择开关旋至欧姆挡“×100 Ω”倍率处,短
接两表笔,进行欧姆调零。测量时,欧姆表的黑表笔接电源的正极,则电压表的“―”极连
接多用电表的红表笔。
②电压表3 V量程的内阻为
R =30×100 Ω=3 000 Ω
V
(2)由串联分压=
15 V量程的内阻等于
R===15 000 Ω
(3)选择“×100 Ω”倍率时所用干电池电动势为E=U+R =1.00 V+×1 500 V=
中
1.5 V。
例2 (1)大于 (2)×10 (3)向上 (4)400
解析 (1)根据题意可知R I;
m n(2)当开关S拨向n时,全电路的总电阻较大,中值电阻较大,能够接入待测电阻的阻值也
更大,所以开关S拨向n时对应欧姆表的挡位倍率较大,即×10;
(3)从“×1”挡位换成“×10”挡位,即开关S从m拨向n,全电路电阻增大,干路电流减
小,①②短接时,为了使电流表满偏,则需要增大通过电流计 G所在支路的电流,所以需
要将R 的滑片向上调节;
0
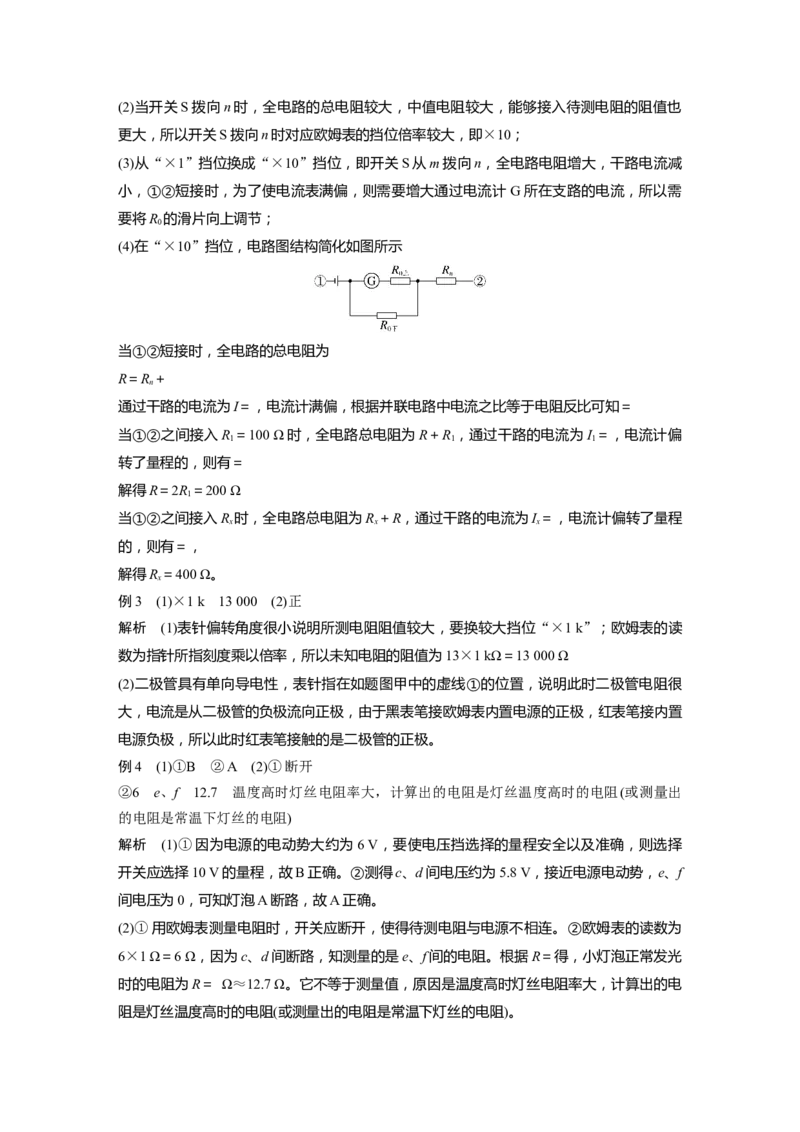
(4)在“×10”挡位,电路图结构简化如图所示
当①②短接时,全电路的总电阻为
R=R+
n
通过干路的电流为I=,电流计满偏,根据并联电路中电流之比等于电阻反比可知=
当①②之间接入R =100 Ω时,全电路总电阻为R+R ,通过干路的电流为I =,电流计偏
1 1 1
转了量程的,则有=
解得R=2R=200 Ω
1
当①②之间接入R 时,全电路总电阻为R+R,通过干路的电流为I=,电流计偏转了量程
x x x
的,则有=,
解得R=400 Ω。
x
例3 (1)×1 k 13 000 (2)正
解析 (1)表针偏转角度很小说明所测电阻阻值较大,要换较大挡位“×1 k”;欧姆表的读
数为指针所指刻度乘以倍率,所以未知电阻的阻值为13×1 kΩ=13 000 Ω
(2)二极管具有单向导电性,表针指在如题图甲中的虚线①的位置,说明此时二极管电阻很
大,电流是从二极管的负极流向正极,由于黑表笔接欧姆表内置电源的正极,红表笔接内置
电源负极,所以此时红表笔接触的是二极管的正极。
例4 (1)①B ②A (2)①断开
②6 e、f 12.7 温度高时灯丝电阻率大,计算出的电阻是灯丝温度高时的电阻(或测量出
的电阻是常温下灯丝的电阻)
解析 (1)①因为电源的电动势大约为6 V,要使电压挡选择的量程安全以及准确,则选择
开关应选择10 V的量程,故B正确。②测得c、d间电压约为5.8 V,接近电源电动势,e、f
间电压为0,可知灯泡A断路,故A正确。
(2)①用欧姆表测量电阻时,开关应断开,使得待测电阻与电源不相连。②欧姆表的读数为
6×1 Ω=6 Ω,因为c、d间断路,知测量的是e、f间的电阻。根据R=得,小灯泡正常发光
时的电阻为R= Ω≈12.7 Ω。它不等于测量值,原因是温度高时灯丝电阻率大,计算出的电
阻是灯丝温度高时的电阻(或测量出的电阻是常温下灯丝的电阻)。第 7 课时 专题强化:测量电阻的其他几种方法
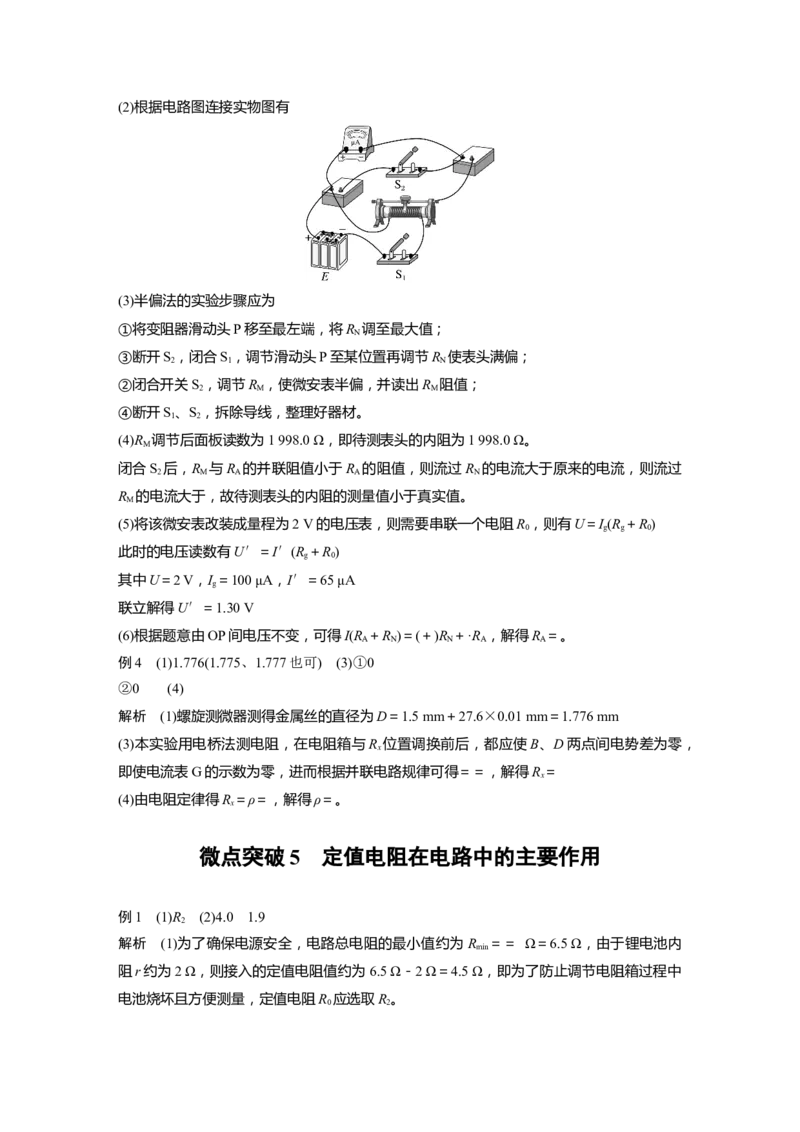
例1 (1)0.34 外 (2)①见解析图 ②5 有 电阻箱的最小分度与待测电阻比较接近(或
其他合理解释)
解析 (1)由电流表的表盘可知电流大小为 0.34 A,电压表的百分比变化为 η =
1
×100%≈5.7%
电流表的百分比变化为
η=×100%≈3.0%
2
可知电压表的示数变化更明显,故采用电流表外接法。
(2)①电路图如图。
②电阻箱读数为R=5 Ω,两次电路中电流相同,可得R=R=5 Ω
0 x 0
电阻箱的最小分度和待测电阻阻值接近,这样测得的阻值不够精确,如待测电阻阻值为5.4
Ω,则实验只能测得其为R=5 Ω,误差较大。
x
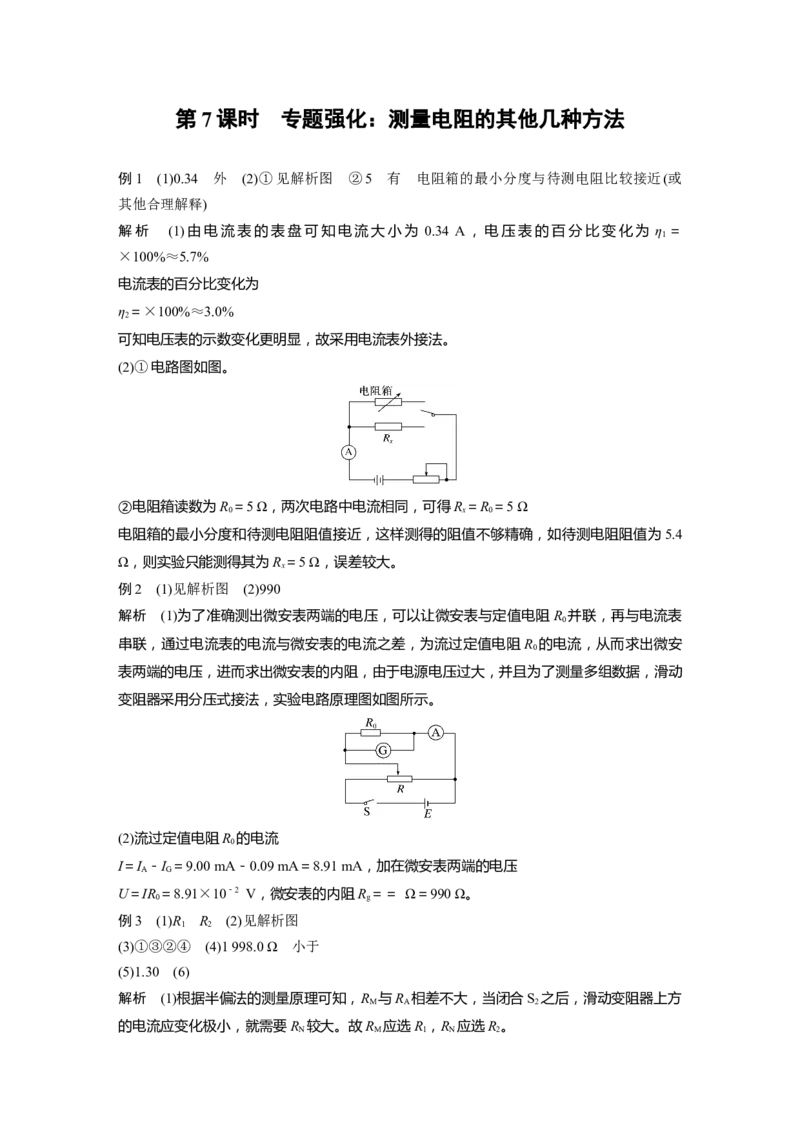
例2 (1)见解析图 (2)990
解析 (1)为了准确测出微安表两端的电压,可以让微安表与定值电阻R 并联,再与电流表
0
串联,通过电流表的电流与微安表的电流之差,为流过定值电阻R 的电流,从而求出微安
0
表两端的电压,进而求出微安表的内阻,由于电源电压过大,并且为了测量多组数据,滑动
变阻器采用分压式接法,实验电路原理图如图所示。
(2)流过定值电阻R 的电流
0
I=I -I =9.00 mA-0.09 mA=8.91 mA,加在微安表两端的电压
A G
U=IR =8.91×10-2 V,微安表的内阻R== Ω=990 Ω。
0 g
例3 (1)R R (2)见解析图
1 2
(3)①③②④ (4)1 998.0 Ω 小于
(5)1.30 (6)
解析 (1)根据半偏法的测量原理可知,R 与R 相差不大,当闭合S 之后,滑动变阻器上方
M A 2
的电流应变化极小,就需要R 较大。故R 应选R,R 应选R。
N M 1 N 2(2)根据电路图连接实物图有
(3)半偏法的实验步骤应为
①将变阻器滑动头P移至最左端,将R 调至最大值;
N
③断开S,闭合S,调节滑动头P至某位置再调节R 使表头满偏;
2 1 N
②闭合开关S,调节R ,使微安表半偏,并读出R 阻值;
2 M M
④断开S、S,拆除导线,整理好器材。
1 2
(4)R 调节后面板读数为1 998.0 Ω,即待测表头的内阻为1 998.0 Ω。
M
闭合S 后,R 与R 的并联阻值小于R 的阻值,则流过R 的电流大于原来的电流,则流过
2 M A A N
R 的电流大于,故待测表头的内阻的测量值小于真实值。
M
(5)将该微安表改装成量程为2 V的电压表,则需要串联一个电阻R,则有U=I(R+R)
0 g g 0
此时的电压读数有U′=I′(R+R)
g 0
其中U=2 V,I=100 μA,I′=65 μA
g
联立解得U′=1.30 V
(6)根据题意由OP间电压不变,可得I(R +R )=(+)R +·R ,解得R =。
A N N A A
例4 (1)1.776(1.775、1.777也可) (3)①0
②0 (4)
解析 (1)螺旋测微器测得金属丝的直径为D=1.5 mm+27.6×0.01 mm=1.776 mm
(3)本实验用电桥法测电阻,在电阻箱与R 位置调换前后,都应使B、D两点间电势差为零,
x
即使电流表G的示数为零,进而根据并联电路规律可得==,解得R=
x
(4)由电阻定律得R=ρ=,解得ρ=。
x
微点突破 5 定值电阻在电路中的主要作用
例1 (1)R (2)4.0 1.9
2
解析 (1)为了确保电源安全,电路总电阻的最小值约为R == Ω=6.5 Ω,由于锂电池内
min
阻r约为2 Ω,则接入的定值电阻值约为6.5 Ω-2 Ω=4.5 Ω,即为了防止调节电阻箱过程中
电池烧坏且方便测量,定值电阻R 应选取R。
0 2(2)多次改变电阻箱的阻值R,读出电压U,根据U=E-I(r+R)=E-(r+R),变形有=+·,
1 2 2
结合题图乙有=0.25 V-1,= Ω·V-1
解得E=4.0 V,r=1.9 Ω。
例2 (1)电压表V不能准确测出电流表A 两端电压 (2)见解析图
1
(3)或
I、I 分别表示电流表A、A 的读数,R 为10 Ω
1 2 1 2 0
解析 (1)电压表的满偏电压为15 V,根据电表的读数在半偏左右读数最准确,但此电路中
电源电压为3 V,远小于电压表的读数要求,即两者并联时,电压表的读数过小,所以该方
案不可行。
(2)电流表A 的示数从零开始变化,且能测出多组数据,滑动变阻器只有用分压接法才能办
1
到,电压表不能用,要再用一个电流表测电流,由U=IR求得电压,代替电压表的作用,
电路如图:
(3)根据电路图,设通过电流表A 、A 的电流分别为I 、I ,R 为定值电阻,电阻R 两端的
1 2 1 2 0 0
电压与电流表A 的电压相等,即U =U =(I -I)R ,通过电流表A 的电流由表盘读出大
1 A1 R0 2 1 0 1
小为I,根据R=,代入解得r==。
1 1
例3 (1)B (2)①见解析图(a) ②R
1
③见解析图(c)
解析 (1)电压表示数的变化范围小,原因是外电阻的阻值远大于电源内阻,选项B正确。
(2)①根据数据描点并连成一条直线,如图(a)所示。
②由图像可知E=1.55 V,U=0时
I=0.59 A,故r′=≈2.63 Ω,
由于2 ΩμBqv ,则物块开始时有
0
向下的加速度,由a=可知,随着速度增大,加速度减小,即物块先做加速度减小的加速运
动,最后达到匀速状态,选项D有可能是物块运动的v-t图像,B不可能是物块运动的v-
t图像;若mg<μBqv ,则物块开始有向上的加速度,物块做减速运动,由 a=可知,随着速
0
度减小,加速度减小,即物块先做加速度减小的减速运动,最后达到匀速状态,选项C有
可能是物块运动的v-t图像。]
例4 C [在0~1 s内,v-t图像的斜率减小,物块的加速度减小,所受滑动摩擦力减小,
对传送带的压力减小,而物块做加速运动,所受洛伦兹力增大,所以洛伦兹力一定竖直向上,
由左手定则可知,物块一定带负电,A错误;物块达到最大速度的条件是摩擦力等于零,不
再加速,所以1 s末物块与传送带间的摩擦力恰好为零,此时物块的速度为 0.5 m/s,传送带
的速度可能是0.5 m/s,也可能大于0.5 m/s,B错误,C正确;由C项分析知传送带的速度
大于等于0.5 m/s,无论传送带的速度增大到多大,物块加速到0.5 m/s后都不再加速,即物
块的最大速度等于0.5 m/s,D错误。]
例5 A [根据题图可知,轨迹1和3对应的粒子转动方向一致,则轨迹1和3对应的粒子
为电子,轨迹2对应的粒子为正电子,电子带负电荷且顺时针转动,根据左手定则可知,磁
场方向垂直纸面向里,A正确,D错误;粒子在云室中运动,洛伦兹力不做功,而粒子受到
云室内填充物质的阻力作用,粒子速度越来越小,B错误;带电粒子若仅在洛伦兹力的作用
下做匀速圆周运动,根据牛顿第二定律可知 qvB=m,解得粒子运动的半径为r=,根据题
图可知轨迹3对应的粒子运动的半径更大,速度更大,粒子运动过程中受到云室内物质的阻力的情况下,此结论也成立,C错误。]
例6 AD [由题意可知,粒子在磁场中沿顺时针做圆周运动,根据左手定则可知粒子带负
电荷,故A正确;粒子的运动轨迹如图所示,O′为粒子做匀速圆周运动的圆心,其轨道半
径R=a,故C错误;由洛伦兹力提供向心力可得qvB=m,则v=,故B错误;由图可知,
ON=a+a=(+1)a,故D正确。]
例7 ACD [根据题意作出α粒子的运动轨迹如图所示,由几何知识可知,α粒子在磁场中
做圆周运动的轨迹半径r=l,因为粒子做圆周运动的半径r=,质子与α粒子的比荷之比为
2∶1,所以两者在磁场中运动半径之比为1∶2,质子运动半径为l,故A正确,B错误;α
粒子在磁场中做圆周运动的周期T=,转过的圆心角θ =300°,则α粒子在磁场中的运动时
1
间t=T=,质子从O点射入,P点射出,运动半径为l,可知质子从O点射入的速度方向必
1
与OP边界垂直,转过的圆心角θ=180°,故t=T′=,所以质子和α粒子发射的时间间隔
2 2
为t-t=,故C、D正确。]
1 2
第 3 课时 专题强化:带电粒子在有界匀强磁场中的运动
例1 AD [根据牛顿第二定律得qvB=,解得r=,由题知v、B大小均相同,则轨迹半径r
与成正比,故r∶r =2∶3,选项A正确;离子的运动周期为T==,则知T∶T =2∶3,
1 2 1 2
根据左手定则分析和几何知识可知,两离子重新回到边界时的速度方向相同,重新回到边界
时两个离子的速度偏向角均为2π-2θ,轨迹的圆心角也为2π-2θ,则运动时间t=T,可知
重新回到边界所用时间之比为2∶3,选项B错误;根据动量p=mv,由于磁场不改变速度
的大小,且两个离子的质量不相等,所以两个离子的动量也不相等,C错误;由几何知识可
知离子重新回到边界时的位置与O点距离d=2rsin θ,由于θ相同,r不同,故d不同,选
项D正确。]
例2 D [轨迹如图所示,根据对称性知,粒子进入磁场时速度方向与 MN边界的夹角也为
30°,则转过的圆心角为α=300°,粒子在磁场中运动周期为T=,则运动的时间为t=T=,A、B、C错误;设轨迹半径为r,由l=r+rcos 30°,解得r=2(2-)l,根据qvB=m,解得v
=,D正确。]
例3 B [如图所示,设圆形磁场区域的半径为R,粒子以v 射入磁场时的轨迹半径为r ,
1 1
根据几何关系r=R,以v 射入磁场时的轨迹半径r=R。
1 2 2
根据洛伦兹力提供向心力有qvB=,可得v=,所以==,故选B。]
例4 C [正电子恰好从MN边界射出的轨迹如图所示,根据正电子的运动的轨迹可知,不
可能从M点射出磁场,选项A错误;负电子从D点离开磁场的轨迹如图,负电子从D点离
开磁场时,由几何关系知()2+(-r)2=r2,解得r=L,则负电子的速度大小为v==,选项B
错误;当从MN边射出的正电子运动的轨迹与MN相切时在磁场中运动时间最长,由几何关
系可知圆心角为120°,则最长时间t =×=,选项C正确;正电子从C、M之间射出时在磁
m
场中运动时间最长,则在磁场中运动的最长时间为t ′==,选项D错误。]
m
例5 BC [若离子通过下部分磁场直接到达P点,如图甲所示,根据几何关系则有R=L,
由qvB=m,可得v==kBL,根据对称性可知出射速度与SP成30°角斜向上,故出射方向与
入射方向的夹角为θ=60°。当离子在两个磁场均运动一次时,如图乙所示,因为两个磁场
的磁感应强度大小均为B,则根据对称性有R=L,
根据洛伦兹力提供向心力,有qvB=m,可得v==kBL,此时出射方向与入射方向相同,即出射方向与入射方向的夹角为θ=0°。通过以上分析可知当离子从下部分磁场射出时,需满
足v==kBL(n=1,2,3…),此时出射方向与入射方向的夹角为θ=60°;当离子从上部分磁场
射出时,需满足v==kBL(n=1,2,3…),此时出射方向与入射方向的夹角为θ=0°,故B、C
正确,A、D错误。]
例6 AD [带电粒子从C点射出磁场,轨迹如图甲所示,由几何关系得sin 30°=,解得r
1
=2R;
带电粒子从D点射出磁场,轨迹如图乙所示,由几何关系得 AODO 是菱形,所以粒子的轨
2
迹半径r =R,所以粒子在磁场中运动的轨迹半径满足r≤r≤r ,由洛伦兹力提供向心力得
2 2 1
qvB=m,解得从A点射出的粒子的比荷满足≤≤,故选A、D。]
第 4 课时 专题强化:用“动态圆”思想处理临界、极值
问题
例1 CD [带电粒子在磁场中的运动半径r==d,选项A错误;设从某处E进入磁场的粒
子,其轨迹恰好与AC相切(如图所示),则E点与A点的距离为AO-EO=2d-d=d,粒子
在距A点0.5d处射入,会进入Ⅱ区域,选项B错误;粒子在距A点1.5d处射入,不会进入
Ⅱ区域,在Ⅰ区域内的轨迹为半圆,运动的时间为t==,选项C正确;进入Ⅱ区域的粒子,
弦长最短时的运动时间最短,且最短弦长为 d,与半径相同,故对应圆心角为60°,最短时
间为t ==,选项D正确。]
min
例2 (1)或 (2)
解析 (1)由题意可知,沿x轴正方向出射的离子,经半圆到达N点,由此可得r=a,可知通过M点的离子有两个出射方向,如图甲,一个轨迹转过的圆心角为
60°,即t =T,另一个轨迹转过的圆心角为300°,即t =T,离子做匀速圆周运动,周期T
1 2
=,即T=,
解得t=,t=
1 2
(2)如图乙所示,由动态圆分析结果可知,能打到收集板上的离子分布在速度方向与 x轴正
方向成60°角的范围内,因为放射源均匀打出离子,因此打到收集板上的离子数占辐射总数
的比例为=。
例3 B [粒子受到的洛伦兹力充当向心力,粒子运动的轨迹半径R=d,粒子运动到绝缘
板的两种临界情况如图甲所示,由几何关系可知,左侧最远处与S之间的距离恰好是圆的直
径,则左侧最远处A到C距离为d,右侧离C最远处为B,距离为d,所以粒子能打在板上
的区域长度是(+1)d,故A错误;左侧最远处与S之间的距离恰好是圆的直径,所以从S到
A的时间恰好是半个周期,则t ===,故B正确;打在板上的粒子中,在磁场中运动时间
1
最长和最短的粒子运动轨迹示意图如图乙所示,粒子做整个圆周运动的周期T=,由几何关
系可知,最短时间t=T=,最长时间t=T=,Δt=t-t=,故C、D错误。]
2 1 1 2
例4 AD [带电粒子以垂直于cd边的某一速度射入正方形内,经过时间t 刚好从c点射出
0
磁场,则知带电粒子的运动周期T=2t 。该粒子从O点以与Od成30°角的方向射入磁场,
0
随着粒子速度逐渐增大,轨迹由①→②→③→④依次渐变,由图可知粒子在四个边射出时,
射出范围分别为OG、FE、DC、BA之间,不可能从四个顶点射出,故A正确。由上述分析
知粒子运动周期为2t ,由图分析可知,从ab边射出的粒子所用时间不可能为t ,从bc边射
0 0
出的粒子所用时间不超过T=,所有从cd边射出的粒子转过的圆心角都是300°,所用时间为=,故B、C错误,D正确。]
例5 BD [由R=可知,粒子速度越大,运动半径越大。如图,在能到达半圆形边界的粒
子中,经过a点的粒子运动半径最小,速度最小,其轨迹如图中轨迹 1所示,由=,解得
v =,故A错误;经过b点的粒子运动半径最大,速度最大,其轨迹如图中轨迹 2所示,
min
由=,解得v =,故B正确;由分析可知,轨迹圆弧所对应的弦与ab半圆形边界相切时,
max
圆心角最小,运动时间最短,其轨迹如图中轨迹3所示,圆心恰好位于a点,由R=,解得
v=;其圆心角为120°,故运动时间为t==,故C错误,D正确。]
微点突破 6 磁聚焦 磁发散
例1 (4-2)R
解析 设粒子在匀强磁场Ⅰ中做匀速圆周运动的半径为r ,根据几何关系有r =R,粒子在
1 1
匀强磁场Ⅰ中做匀速圆周运动时,根据洛伦兹力提供向心力有Bqv=m
根据题中条件可知,粒子源改变位置后带电粒子仍从P点进入匀强磁场Ⅱ,设粒子进入匀
强磁场Ⅱ时与x轴正方向的夹角为θ,根据几何关系有rcos θ+=r
1 1
根据几何关系可知,此时带电粒子打在收集板上的落点到P点的距离d=2rsin θ,且r=,
2 2
收集板的最小长度L=2r-d,解得L=(4-2)R。
2
例2 (1) (2)
(3)-R~R
解析 (1)由动能定理可知qU=mv2
由已知条件结合几何关系可知,带电粒子在磁场中运动的半径R=R
0
洛伦兹力提供向心力qvB=m,得=
(2)沿y轴正方向入射的带电粒子,设其在磁场中做圆周运动的圆心角为θ,由几何关系θ=
90°,所以t=T=T,且T=,解得t=
(3)如图,沿QN方向入射的带电粒子,离开磁场的出射点a在y轴上的投影与O′的距离为
Δy=R+R,故a点的纵坐标y=R
a同理可得,沿PM方向入射的带电粒子离开磁场的出射点b的纵坐标y =-R,带电粒子离
b
开磁场时的纵坐标范围-R~R
跟踪训练
1.AC [由题意,初速度沿y轴正方向的粒子经过磁场后,恰能垂直射在光屏上,有qBv=
m,r=R,解得v=,A正确;由于所有粒子的速度大小相等,但方向不同,且离开磁场区
域的出射点距离O点的竖直高度最大值为2R,并不会全部垂直打在光屛上,B错误;如图
甲,由几何关系可得,能射在光屏上的粒子中,运动时间最长的对应轨迹的圆心角为π,
根据周期公式T=,可得t=T=,C正确;若能打在光屛下端,如图乙,由几何关系可得θ
1
=60°,即初速度与x轴夹角为θ =60°,同理,粒子打在光屛上端时,初速度与x轴夹角为
1
θ=120°,则60°≤θ≤120°,D错误。]
2
2.(1) (2)
解析 (1)分析可知粒子做圆周运动的半径为R,由qvB=m,得v=
0 0
(2)分析可知粒子源左端点M与右端点N发射的粒子均从磁场边界与OO′交点射出,且转
过的圆心角分别为:θ =,θ =,两粒子在磁场中运动的周期为T==
M N
两粒子在磁场中运动的时间分别为t =T,t =T,由于两个粒子在匀强磁场区域外部运动的
M N
时间相等,所以Δt即为在磁场中运动的时间差,即Δt=t -t ,得Δt=。
M N
3.(1)垂直于纸面向外
(2)(+) (3)(+)R
解析 (1)从P点垂直于x轴发射的正离子恰好经过Q点进入第一象限,说明正离子在P点
受到向右的洛伦兹力,由左手定则知磁场方向垂直于纸面向外。如图所示,设离子在圆形区
域内做圆周运动的轨迹半径为r,则r=R,由洛伦兹力提供向心力有qvB=m,解得v=
0 0(2)设离子在第二象限磁场中圆周运动的周期为T,则T==,则在第一象限磁场中圆周运动
的周期为T′==,离子在圆形区域磁场中运动圆心角为90°,则运动时间t=T=
1
离子在两磁场之间匀速直线运动时间
t==
2
离子在AC右侧区域磁场中运动轨迹对应的圆心角为300°,运动时间t =T′=,则离子从
3
发射到第二次经过边界AC所用的时间t=t+t+t,得t=(+)
1 2 3
(3)如图所示,因所有离子均以恒定速率发射,故离子在圆形磁场中的轨迹半径均为r,又已
知r=R,易得所有离子经过圆形磁场后均水平向右飞出圆形磁场,然后穿过 AC进入右侧磁
场,离子在第一象限运动有qv·2B=m,得r′=,从C点进入右侧磁场的离子,经过半个
0
周期打到屏上E点,则CE=2r′=R。
从M点进入右侧磁场的离子,轨迹恰好与屏CG相切于D点,图中CF垂直于OM,则CD
2
=r′-r′tan 30°
得CD=(-)R,则探测板上有离子打到的区域为DE,其长度DE=CE-CD=(+)R。
第 5 课时 洛伦兹力与现代科技
例1 CD [粒子在电场中加速,由动能定理可得Uq=mv2,解得v=,粒子进入速度选择
1
器中做匀速直线运动,由平衡条件可得=Bqv,联立可得=,粒子在磁场中做圆周运动,由
1
洛伦兹力充当向心力,有Bqv=m=m,与=Bqv联立可得=,与v=
2 1
联立可得=,故选C、D。]
例2 AD [粒子在磁场中飞出的最大轨道半径为 D形盒的半径,对应速度也最大,则有
qv B=m,最大动能为E =mv 2,在电场中加速一次,在磁场中旋转半周,令加速的次
max kmax max
数为n,则有E =nqU,解得n=,则粒子运动的时间t=n,其中T=,解得t=,可知,
kmax
两种粒子在回旋加速器中运动的时间相等,A正确,B错误;粒子离开出口处的动能最大,
根据上述解得E =,H粒子的质量数为2,电荷数为1,He粒子的质量数为4,电荷数为
kmax
2,可知He粒子离开出口处的动能为H粒子的两倍,即两种粒子离开出口处的动能不相等,
C错误,D正确。]
拓展 (1)电场 磁感应强度B
(2)不可以例3 C [若带电微粒带正电,则受到的洛伦兹力向上,静电力向下,若带电微粒带负电,
则受到的洛伦兹力向下,静电力向上,微粒沿PQ运动,洛伦兹力等于静电力,因此微粒可
以带正电也可以带负电,故A错误;对微粒受力分析有Eq=qvB,解得B=,故B错误;若
带电微粒带负电,从Q孔沿QP连线射入,受到的洛伦兹力和静电力均向上,若带电微粒带
正电,从Q孔沿QP连线射入,受到的洛伦兹力和静电力均向下,不可能做直线运动,故不
能从P孔射出,故C正确;若将该带电微粒以2v的速度从P孔沿PQ连线射入后,洛伦兹
力大于静电力,微粒做曲线运动,由于洛伦兹力的方向一直在变,微粒不可能做类平抛运动,
故D错误。]
例4 C [根据题意,由左手定则可知,河水中的正离子向外面金属板偏转,外面金属板为
正极,负离子向里面金属板偏转,里面金属板为负极,则电阻 R上的电流方向从外向里,
故A错误;
设稳定时产生的感应电动势为E,两板间有一带电荷量为q的离子匀速运动,受力平衡,根
据平衡条件可得qvB=q,解得E=Bdv,故C正确;
设极板间等效电阻为r,由闭合电路欧姆定律可得,两金属板间电压为U=·R=,可知河水
流速减小,两金属板间的电压减小,故B错误;
根据题意,由电阻定律可得,极板间等效电阻为r=ρ,由闭合电路欧姆定律可得,流过电
阻R的电流大小为I==,故D错误。]
例5 D [根据左手定则可知,进入磁场区域时正电荷会向上偏转,负电荷向下偏转,所以
M点的电势一定高于N点的电势,故A错误;某段时间内通过电磁流量计的流量为70
m3/h,通过排污管的污水流量也是70 m3/h,流量计半径为r=5 cm=0.05 m,排污管的半径
R=10 cm=0.1 m,由Q=πr2v =πR2v 可知,流经电磁流量计的液体速度为v =2.5 m/s,排
1 2 1
污管内污水的速度为v =0.625 m/s,故B、C错误;流量计内污水的速度约为v =2.5 m/s,
2 1
当粒子在电磁流量计中受力平衡时,有q=qvB,可知=vd=0.25 m2/s,故D正确。]
1 1 1
例6 D [根据安培定则可知螺绕环在霍尔元件处产生的磁场方向向下,则要使元件输出霍
尔电压U 为零,直导线ab在霍尔元件处产生的磁场方向应向上,根据安培定则可知待测电
H
流I′的方向应该是b→a;元件输出霍尔电压U 为零,则霍尔元件处合磁感应强度为0,所
H
以有kI=kI′,解得I′=I,故选D。]
1 0 2 0
思考 这四种装置的共同特点:带电粒子在叠加场中受到的静电力和洛伦兹力平衡(即qvB
=qE 或qvB=q),带电粒子做匀速直线运动。
第 6 课时 专题强化:带电粒子在组合场中的运动
例1 (1)×10-2 T (2)5.5×10-6 s解析 (1)粒子从O到C在电场中加速,则由动能定理得Eqx=mv2
解得v=4×105 m/s
带电粒子在磁场中运动轨迹如图所示
由几何关系可知R==0.6 m
1
由qvB=m
1
代入数据解得B=×10-2 T
1
(2)由题可知B=3B=2×10-2 T,则qvB=m,则R==0.2 m,
2 1 2 2
在磁场B 中的运动周期为T==
2 2
在磁场B 中的运动时间为t=T=×10-6 s=5.5×10-6 s。
2 2
例2 (1) (2)(或60°)
(3)见解析图
解析 (1)设板间距离为d,则板长为d,带电粒子在板间做类平抛运动,两板间的电场强度
为E=,根据牛顿第二定律得qE=ma,解得a=
设粒子在平板间的运动时间为t,根据类平抛运动的规律得=at2, d=vt,联立解得U=
0 0 00
(2)设粒子出电场时与水平方向夹角为α,则有tan α==,故α=
则出电场时粒子的速度为v==v
0
粒子出电场后做匀速直线运动,接着进入磁场,根据牛顿第二定律有 qvB=m,解得r=
=,已知圆形磁场区域半径为R=,故r=R。粒子沿PO方向射入磁场,轨迹如图所示,即
沿半径方向射入磁场,故粒子将沿半径方向射出磁场,粒子射出磁场时与射入磁场时运动方
向的夹角为θ,则粒子在磁场中运动圆弧轨迹对应的圆心角也为 θ,由几何关系可得θ=2α
=
故粒子射出磁场时与射入磁场时运动方向的夹角为(或60°);
(3)粒子在该磁场中运动的半径与圆形磁场半径关系为r=R,根据几何关系可知,粒子在该磁场中运动的轨迹一定为劣弧,故劣弧所对应轨迹圆的弦为磁场圆的直径时粒子在磁场中运
动的时间最长,则相对应的运动轨迹以及圆心M的位置如图所示。
例3 (1) (2) (3)
解析 (1)带电粒子在磁场中的运动轨迹如图所示,其圆心为O,对应轨道半径为R,
1
由几何关系可得Rsin θ=L,解得R=2L
由洛伦兹力提供向心力有qvB=
联立可得B=
(2)带电粒子从P 点运动到P 点所用的时间为t=T,T==
1 2
联立可得t=
(3)设带电粒子在电场中的运动时间为t′,由运动的合成与分解有
vcos θ·t′=L,vsin θ-at′=0
由牛顿第二定律有qE=ma
联立可得E=。
例4 (1) 8eU (2)
解析 (1)电子在电场中加速有2eU=mv2,在Ⅰ区磁场中,由几何关系可得r=Rtan 22.5°=
0.4R,根据洛伦兹力提供向心力有Bev=m
1
联立解得B=,电子在Ⅰ区磁场中的运动周期为T=,由几何关系可得,电子在Ⅰ区磁场中
1
运动轨迹对应的圆心角为φ=π,电子在Ⅰ区磁场中的运动时间为t=T
联立解得t=
电子从P到Q在电场中共加速8次,故在Q点出射时的动能为E=8eU
k
(2)设电子在Ⅰ区磁场中做匀速圆周运动的最大半径为r ,此时圆周的轨迹与Ⅰ区磁场边界
m
相切,由几何关系可得(R-r )2=R2+r 2,解得r =R,根据洛伦兹力提供向心力有Bev =
m m m 1 m
m,2eU=mv 2-keU
m
联立解得k=。第 7 课时 专题强化:带电粒子在叠加场和交变电、磁场中
的运动
例1 (1) (2)
(3)(+1)
解析 (1)微粒到达A(l,l)之前做匀速直线运动,对微粒受力分析如图甲,可知Eq=mg,得
E=。
(2)由平衡条件得:qvB=mg
电场方向变化后,微粒所受重力与静电力平衡,微粒在洛伦兹力作用下做匀速圆周运动,运
动轨迹如图乙,有qvB=m
由几何知识可得:
r=l
联立解得:
v=,
B=。
(3)微粒做匀速直线运动的时间:
t==
1
微粒做匀速圆周运动的时间:
t==
2
微粒在叠加场中的运动时间:
t=t+t=(+1)。
1 2
例2 BC [由题可知电子所受电场力水平向左,电子从N到P的过程中电场力做负功,故A错误;根据沿着电场线方向电势逐渐降低可知,N点的电势高于P点的电势,故B正确;
由于洛伦兹力一直都和速度方向垂直,故电子从M到N,洛伦兹力不做功,故C正确;由
于M点和P点在同一等势面上,故从M点到P点电场力做功为0,而洛伦兹力不做功,M
点速度为0,根据动能定理可知电子在P点速度也为0,则电子在M点和P点都只受电场力
作用,在匀强电场中电子在这两点所受电场力相等,即所受合力相等,故D错误。]
例3 (1) (2)(n=1,2,3…)
解析 (1)正离子射入磁场,洛伦兹力提供向心力,有Bqv=
0 0
做匀速圆周运动的周期T=
0
由以上两式得磁感应强度B=
0
(2)要使正离子从O′垂直于N板射出磁场,v 的方向应如图所示,两板之间正离子只运动
0
一个周期T 时,有R=;当两板之间正离子运动n个周期即nT 时,有R=(n=1,2,3…)
0 0
联立解得正离子的速度的可能值为
v==(n=1,2,3…)。
0
例4 (1) (2)(π+2)
(3)d=(n=1,2,3…)
(4)x =(π+2)(n=1,2,3…)
P
解析 (1)粒子第一次在电场中有qE=ma,v=at,t=
0 1 0 0
粒子第一次进入磁场中有qvB=,联立解得R=
1 0 1
(2)由题意可知粒子经2次加速和偏转后打在x轴负半轴上到O点的距离最小,如图甲所示
第一次加速的位移为Δx==
1
第二次加速的位移Δx=3Δx
2 1
v=2at=,
2 0
则R==
2
Δx =Δx-Δx+R=(π+2)
P 2 1 2
(3)分析带电粒子运动轨迹,如图乙所示可知A与坐标原点间的距离d应满足d=n2R=(n=1,2,3…)
1
(4)若粒子经过n次加速和偏转后打在x轴上
x =n(Δx+R)=(π+2)(n=1,2,3…)。
P 1 1
微点突破 7 带电粒子在立体空间中的运动
例1 D [将电子的初速度沿x轴及y轴方向分解,沿x轴方向,速度与磁场方向平行,做
匀速直线运动且x=vcos α·t,沿y轴方向,速度与磁场方向垂直,洛伦兹力提供向心力做
0
匀速圆周运动,由左手定则可知,磁场方向沿x轴正方向,故A错误;
根据evB=m,T=,且v=vsin α,解得D=2R=,T=,所以Δx=vT=,所以,若仅增
y y 0 x
大磁感应强度B,则D、Δx均减小,故B错误;
若仅增大v,则D、Δx皆按比例增大,故C错误;
0
若仅增大α,则D增大而Δx减小,且α=90°时Δx=0,故D正确。]
例2 (1)v≤ (2)v≤
(3)(n=0、1、2、3…)
解析 (1)速度方向与电场强度方向垂直的粒子击中N板,则全部击中N板,R=vt,d=at2
0
其中a=,解得v=
0
所以速度大小满足v≤。
(2)粒子源发射出的方向与OO 连线成θ(0<θ<90°)角的粒子,做螺旋等距运动,v=vsin θ
1 2 y
根据洛伦兹力提供向心力qvB=,根据题意可知r≤,解得v≤
y
(3)设粒子在两板间运动时间为t′,在磁场中周期为T,则应该满足t′=(n+)T(n=0、1、
2、3…),根据d=a′t′2,其中a′=,且粒子圆周运动周期T=
联立解得E=(n=0、1、2、3…)。
例3 (1)正电 (2) (3)-
解析 (1)粒子在磁场中的运动轨迹如图由左手定则知粒子带正电;
(2)设粒子做圆周运动的半径为r,由几何关系有rcos θ=d,根据洛伦兹力提供向心力qvB
0
=m,解得B=
(3)设粒子经过x轴时的坐标为-x,则x+rsin θ=2d
1 1
粒子在y>0区域电场中做类平抛运动,在xOy平面内沿v 方向做匀速直线运动,设粒子碰
0
到屏前做类平抛运动的时间为t,则vcos θ·t=2d-x,粒子运动的加速度a=
1 0 1 1
在z轴负方向运动的距离z′=at2
1 1
解得t=,z′=,所以打到屏上位置的z轴坐标z=-。
1 1 1
跟踪训练
1.D [根据功率的计算公式可知P=Fvcos θ,则电场力的瞬时功率为P=Eqv ,A错误;
1
由于v 与磁场B平行,则根据洛伦兹力的计算公式知F =qvB,B错误;离子在垂直于磁
1 洛 2
场方向做匀速圆周运动,沿磁场方向做加速运动,则v 增大,v 不变,v 与v 的比值不断变
1 2 2 1
小,C错误;离子受到的洛伦兹力大小不变,电场力大小不变,合力大小不变,则该离子的
加速度大小不变,D正确。]
2.CD [粒子在Ⅰ区域xOz平面内做圆周运动,轨迹如图所示,根据几何关系可知r=2l
1
根据洛伦兹力提供向心力qvB=m,可得Ⅰ区域磁感应强度的大小B=,故A错误;粒子在
0
Ⅱ区域yOz平面做类平抛运动,z轴方向有l=vt ,y轴方向有=at2,加速度为a=,解得
02 2
Ⅱ区域电场强度的大小E=,故B错误;粒子在M点沿y轴方向的分速度为v=at =v ,粒
y 2 0
子进入Ⅲ区域后在xOy平面做圆周运动,轨迹如图所示
由几何关系可知()2+r2=(l-r)2,解得r =l,其周期为T==,故C正确;粒子在z轴方向
2 2 2
上做匀加速运动,故螺距不断变大,故D正确。]3.(1)0.25 T (2) N/C(n=1,2,3…) (3)0.4 m 0.1 m
解析 (1)由于所有α粒子恰好能束缚在正方形abcO区域内,根据几何关系有r==0.4 m
粒子在磁场中做匀速圆周运动,则有qvB=,解得B=0.25 T。
(2)粒子在磁场中圆周运动的周期
T==1.6π×10-7 s
粒子沿电场方向做匀加速直线运动,则有L=×(nT)2,解得E= N/C(n=1,2,3…)
(3)匀强电场电场强度的大小取第(2)问中的最大值,则有E= N/C
1
当x轴坐标为最大值时t=T=8π×10-8 s,则有y=×t2=0.4 m
1 1 1
当x轴坐标为最小值时t=T=4π×10-8 s,则有y=×t2=0.1 m。
2 2 2
阶段复习(四) 电场和磁场
规范训练 (1)
(2)<<
解析 (1)由静电力提供向心力可得qE=m①
0 1 0
得=②
区域Ⅱ中x轴方向有L=vt③
0
y轴方向有a=④
=at2⑤
联立②③④⑤式得E=⑥
2
(2)设粒子进入辐向电场的速率为v,
在辐向电场中有qE=m⑦
1
得v=⑧
区域Ⅱ中沿x轴方向有L=vt⑨
1
y轴方向有a=⑩
1
y=at2⑪
11
v=at⑫
y 11
联立⑥⑧⑨⑩⑪⑫式得y=⑬
v=⑭
y
区域Ⅲ中粒子速度方向与x轴正方向的夹角为θ,则tan θ==1⑮
粒子进入区域Ⅲ的速度v′=,
方向与区域Ⅲ中磁场方向垂直⑯
由qv′B=m⑰联立⑭⑮⑯⑰式得r=⑱
为了保证粒子能够打到粒子收集板上,粒子轨迹如图所示,
由几何关系可知粒子在磁场中的半径需要满足LI,故选C。]
2 3
例3 AD [PM刚进入磁场时,有效切割长度等于a,产生的感应电动势为E=Bav,感应
电流为I==,方向沿逆时针,故A正确;NM边所受的安培力大小为F=BIa=,方向垂直
1
NM斜向下,PN边所受的安培力大小为F =BIa=,方向垂直PN斜向下,线框所受安培力
2
大小F==,故B错误;PM两端的电压为U=I·=,故C错误;PM进入磁场后,有效切割
长度逐渐减小,感应电动势逐渐减小,感应电流逐渐减小,故D正确。]
例4 AC [铜质圆盘转动时,根据右手定则可知,电流方向由D点指向O点,则O点相当
于电源的正极,D点相当于电源的负极,则O点电势比D点高,通过R的电流方向由上至下,故A正确,B错误;发电机电动势为E=Br=Br·=,故C正确,D错误。]
例5 C [由于二极管具有单向导电性,所以开关S从断开状态突然闭合时,二极管不能导
通,L 一直不亮;此时L 、L 和L串联在同一回路中,L产生自感电动势阻碍通过其电流增
2 1 3
大,所以通过L 和L 的电流逐渐增大,L 和L 均逐渐变亮,故A、B错误;开关S从闭合
1 3 1 3
状态突然断开时,通过L 的电流立即变为零,所以L 立即熄灭;L产生自感电动势阻碍通
3 3
过其电流减小,此时自感电动势的方向满足二极管导通的条件,所以L 、L 和L串联在同
1 2
一回路中,通过L 的电流逐渐减小,L 逐渐熄灭,而由于L 开始时不亮,所以L 突然变亮,
1 1 2 2
然后逐渐变暗至熄灭,故C正确,D错误。]
例6 A [感应电流产生的条件是闭合回路中的磁通量发生变化。在A图中,系统振动时,
紫铜薄板随之上下及左右振动,在磁场中的部分有时多有时少,磁通量发生变化,产生感应
电流,受到安培力,阻碍系统的振动;在B图中,只有紫铜薄板向左振动才产生感应电流,
而上下振动和向右振动无感应电流产生;在C图中,无论紫铜薄板上下振动还是左右振动,
都不会产生感应电流;在D图中,只有紫铜薄板左右振动才产生感应电流,而上下振动无
感应电流产生,故选项A正确,B、C、D错误。]
第 3 课时 专题强化:电磁感应中的电路和图像问题
例1 BD [由题图乙可知磁感应强度随着时间均匀增大,根据楞次定律,可判断出线圈中
感应电流方向为逆时针,则流过电阻R 的电流方向自上向下,故A错误;根据法拉第电磁
1
感应定律有E=,S=πr2,==,解得E=,根据闭合电路欧姆定律,当稳定后M、N两端
2
电压为外电压U =E=,C错误;电阻R 两端的电压U =E=,故B正确;根据闭合电路
外 1 1
欧姆定律,稳定后电路中的电流I==,根据焦耳定律,在0~t 时间内,电阻R 上产生的
0 2
焦耳热Q=I2Rt=,故D正确。]
2 20
例2 CD [根据右手定则可知,图示位置直金属棒Oa部分充当电源,电源内部电流方向
为O→a,外电路电流方向为b→O,则杆O点电势低于b点电势,故A错误;由法拉第电磁
感应定律可知,感应电动势E =Bdv=Bd·=,根据等效电路可知,圆环部分电阻为R =
感 环
=,整个电路的总电阻为R =R +R=,干路电流为I==,a、b两点的电势差大小U =
总 环 ab
IR =,故B错误;转动过程中金属棒与圆环上消耗的电功率分别为P =I2R,P =I2R =,
环 棒 环 环
故转动过程中金属棒与圆环上消耗的电功率之比为P ∶P =2∶1,故C正确;棒转动一圈
棒 环
时导体棒上产生的热量Q=I2Rt=()2·R·=,故D正确。]
例3 B [在过程Ⅰ中,根据法拉第电磁感应定律,有E ==,根据闭合电路欧姆定律,有
1
I=且q=IΔt
1 1 1 1
在过程Ⅱ中,有E==
2I=,q=IΔt,又q=q,
2 2 2 2 1 2
即=
所以=,故选B。]
例4 AD [根据法拉第电磁感应定律有E==S,根据楞次定律可得感应电流的方向,又线
圈中感应电流沿abca方向为正方向,结合题图乙可得,1~2 s内通过线圈的电流为零,0~
1 s、2~3 s、3~5 s内通过线圈的电流大小恒定,且0~1 s、2~3 s内通过线圈的电流方向
为正,3~5 s内通过线圈的电流方向为负,且大小之比为1∶2,A正确,B错误;根据安培
力的公式,即F =BIL,因为每段时间通过线圈的电流大小恒定,磁场均匀变化,可得安
安
培力也是均匀变化,根据左手定则可判断出ab边所受安培力的方向,可知C错误,D正
确。]
例5 (1)①逆时针方向 ②顺时针方向 ③逆时针方向 (2)C
解析 (2)x在0~L内,由楞次定律判断知感应电流的方向沿逆时针方向,为正,线框的有
效切割长度在均匀增大,由公式E=Blv知,产生的感应电动势均匀增大,则感应电流均匀
增大;x在L~2L内,线框的左右两边都切割磁感线,均产生感应电动势,两个感应电动势
串联,且均匀增大,感应电流方向沿顺时针方向,为负;x在2L~3L内,由楞次定律知,
感应电流的方向沿逆时针方向,为正,线框的有效切割长度在均匀增大,由公式E=Blv知,
产生的感应电动势均匀增大,则感应电流均匀增大,而且感应电流变化情况与线框进入磁场
的过程相同,故C正确,A、B、D错误。
例6 AC [当金属棒从O点向右运动L时,即在0~时间内,在某时刻金属棒切割磁感线
的长度L=l+vttan θ(θ为ab与ad的夹角),
0 0
则根据E=BLv,
0
可得i==(l+vttan θ),
0 0
可知回路电流随时间均匀增加;
安培力F==(l+vttan θ)2,则F-t关系为二次函数关系,但是不过原点;
0 0
安培力做功的功率
P=Fv==(l+vttan θ)2,则P-t关系为二次函数关系,且不过原点;
0 0 0
电阻两端的电压等于金属棒产生的感应电动势,即U=E=BLv =Bv(l +vttan θ),即U-t
0 0 0 0
图像是不过原点的直线;根据以上分析,可排除B、D选项;
在~时间内,金属棒切割磁感线的长度不变,感应电动势E不变,感应电流i不变,安培力
F大小不变,安培力的功率P不变,电阻两端电压U保持不变;同理可判断,在~时间内,
金属棒切割磁感线长度逐渐减小,金属棒切割磁感线的感应电动势 E均匀减小,感应电流i
均匀减小,安培力F大小按照二次函数关系减小,但是不能减小到零,与0~内是对称的关
系,安培力的功率P按照二次函数关系减小,但是不能减小到零,与0~内是对称的关系,电阻两端电压U按线性均匀减小,综上所述选项A、C可能正确,B、D错误。]
第 4 课时 专题强化:电磁感应中的动力学和能量问题
例1 BCD [t时刻,金属杆的速度大小为v=at,产生的感应电动势为E=Blv,电路中的
感应电流I=,金属杆所受的安培力大小为F =BIl=,由牛顿第二定律F-mgsin 37°-F
安 安
=ma得F=ma+mgsin 37°+,F与t是一次函数关系,选项A错误,B正确;t=0时,F最
小,代入数据可求得a=2 m/s2,选项D正确;t=2 s时,代入数据解得F=12 N,选项C正
确。]
例2 见解析
解析 运动过程分析:取一极短时间Δt,棒做加速运动,持续对电容器充电,则存在充电
电流。
由F-BIL=ma,I=,ΔQ=CΔU,ΔU=ΔE=BLΔv,联立可得F-=ma,其中=a,则可得
a=,所以棒做加速度恒定的匀加速直线运动。
拓展
1.金属棒在重力和安培力的作用下向下运动,根据牛顿第二定律有mgsin θ-BIL=ma,I
===CBLa,联立可得a=。
2.mgsin θ-μmgcos θ-BIL=ma,I===CBLa,联立解得a=。
例3 (1)0.4 m/s2 (2)18 m/s 2 m/s
(3)40 m/s
解析 (1)恒力作用于MN棒,使其在导轨上向右加速运动,切割磁感线产生感应电流,根
据右手定则知电流方向为M→N,电流流经PQ,根据左手定则知MN所受安培力水平向左,
PQ受到的安培力水平向右,它们都做加速运动,对MN由牛顿第二定律得F-BIL=ma,对
PQ由牛顿第二定律得BIL=ma′,联立解得a′=0.4 m/s2。
(2)设某时刻MN速度为v,PQ速度为v,根据法拉第电磁感应定律有
1 2
I=
在t=10 s时,对MN由牛顿第二定律得F-BIL=ma,
整理得F-=ma
代入数据得v -v =16 m/s,由于作用于两棒的安培力等大反向,所以作用于两棒系统的合
1 2
力为水平恒力F,对系统由动量定理得Ft=(mv +mv)-0,代入数据得v +v =20 m/s,联
1 2 1 2
立解得v=18 m/s,v=2 m/s。
1 2
(3)MN棒做加速度减小的加速运动,PQ棒做加速度增大的加速运动,最终有共同加速度,
设两金属棒的共同加速度为a ,对系统有F=2ma ,对PQ棒有BI L=ma ,其中I =
共 共 m 共 m
=,联立解得Δv =40 m/s。
m例4 (1)b端电势高 5 N (2)1.47 J
解析 (1)由右手定则可判断感应电流由a流向b,b相当于电源的正极,故b端电势高,当
金属棒匀速运动时,由平衡条件得F=mgsin 37°+F ,其中F =BIL=,由题图乙可知v
安 安
=1.0 m/s,联立解得F=5 N
(2)从金属棒开始运动到恰好达到稳定状态,由动能定理得(F-mgsin 37°)s-W =mv2,又
克安
克服安培力所做的功等于整个电路产生的焦耳热,代入数据解得 Q=W =7.35 J,金属棒
克安
与电阻产生的焦耳热与阻值成正比,故金属棒上产生的焦耳热为Q=Q=1.47 J。
r
例5 (1) (2)mg(2L+L)
2 1
解析 (1)导线框匀速进入磁场时,受力平衡,受力情况如图所示。根据平衡条件有
F =F +mgsin θ
T 安
其中F =BIL
安 1
I=,E=BL v,导线框与木块通过细线相连,线框匀速进入磁场时,木块匀速下降,根据平
1
衡条件有F =mg
T
对导线框和木块构成的系统,进入磁场前二者一起做匀加速直线运动,根据牛顿第二定律有
mg-mgsin θ=2ma,根据运动学公式可得进入磁场时速度v=
联立以上各式可得B=
(2)导线框恰好匀速进入和离开匀强磁场,导线框通过匀强磁场过程中,线框和木块组成的
系统减少的重力势能转化为电路中产生的焦耳热,根据能量守恒定律得Q=mg(2L+L)-
2 1
mg(2L+L)sin θ,所以导线框通过匀强磁场过程中线框中产生的焦耳热Q=mg(2L+L)。
2 1 2 1
第 5 课时 专题强化:动量观点在电磁感应中的应用
例1 BCD [设导体棒进入磁场时的速度为v ,根据机械能守恒定律有mv2=mgh ,解得
0 0 1
v =4 m/s,故A错误;导体棒从水平轨道水平飞出做平抛运动,则水平方向有x =vt,竖直
0 2
方向有h=gt2,联立代入数据解得v=2 m/s,导体棒通过磁场区域过程中,根据能量守恒定
2
律有Q=mv2-mv2,则导体棒整个运动过程中,电阻R上产生的热量为Q=3 J,故B正确;
0
导体棒通过磁场区域过程中,根据动量定理有 t=Bdq=mv-mv,又有q=t==,联立代
安1 0 1
入数据解得q=2 C,x=2 m,故C、D正确。]
1
例2 ACD [开始时,导体棒中的感应电动势E=2BLv ,电路中感应电流I=,导体棒D
0
所受安培力F=BIL,导体棒D的加速度为a,则有F=ma,解得a=,故A正确;稳定运动时,电路中电流为零,设此时C、D棒的速度分别为v 、v ,则有2BLv =BLv ,对变速运
1 2 1 2
动中任意极短时间Δt,由动量定理得,对C棒有2BLΔt=m(v -v),对D棒有BLΔt=mv ,
0 1 2
故对变速运动全过程有v -v =2v ,解得v =v ,v =v ,故B错误;根据能量守恒定律可
0 1 2 2 0 1 0
知回路产生的内能为Q=mv2-mv2-mv2,解得Q=mv2,故C正确;由动量定理,对C
0 1 2 0
棒有2BLΔt=m(v-v),可得2BLq=m(v-v),解得q=,故D正确。]
0 1 0 1
例3 AB [对炮弹,根据动量定理t=mv,其中,平均安培力=BL,可得v==,故A正
确;刚充电结束时,电容器电荷量为Q=CE,炮弹达到最大速度时,电容器电荷量Q′=Q
-q,此时电容器电压U=,则此时炮弹产生的感应电动势等于U,故BLv=U,联立可得=
BLv,解得C=,故B正确;炮弹在导轨上运动过程,电容器有电压存在,通过炮弹的平均
电流并不是,则t≠q,x≠,故C错误;根据B项分析可知E=v(BL+),故炮弹的最大速度
与电容器电容大小并不成正比,故D错误。]
例4 AC [棒ab以初速度v 向右滑动,切割磁感线产生感应电动势,使整个回路中产生感
0
应电流,判断可知棒ab受到与v 方向相反的安培力的作用而做变减速运动,棒 cd受到与v
0 0
方向相同的安培力的作用而做变加速运动,它们之间的速度差Δv=v -v 逐渐减小,整个
1 2
系统产生的感应电动势逐渐减小,回路中感应电流逐渐减小,最后变为零,即最终棒ab和
棒cd的速度相同,v =v ,这时两相同的光滑导体棒ab、cd组成的系统在足够长的平行金
1 2
属导轨上运动,水平方向上不受外力作用,由动量守恒定律有 mv =mv +mv ,解得v =v
0 1 2 1 2
=,选项A、C正确,B、D错误。]
例5 (1)0.4v (2) d+
0
解析 (1)两棒组成的系统所受合外力为零,因此满足动量守恒定律,有 mv=0.6mv+mv,
0 0
解得v=0.4v
0
回路感应电动势E=0.6BLv-0.4BLv,此时回路电流I=,因此加速度a=,整理得a=
0 0
(2)ab、cd棒速度相等时有最大距离,根据动量守恒定律可得mv=2mv
0 共
对ab棒,根据动量定理有BLΔt=mv ,而q=Δt,解得q=
共
在这段时间内,平均感应电动势=BL,回路平均电流=
因此流过某截面的电荷量q=Δt=Δt=,解得最大距离x=d+。
第十三章 交变电流 电磁波 传感器
第 1 课时 交变电流的产生和描述
例1 C [如图所示,导体棒匀速转动,设速度大小为v,设导体棒从A到B的过程中,棒转过的角度为θ,则导体棒垂直磁感线方向的分速度为v⊥ =vcos θ,可知导体棒垂直磁感线
的分速度为余弦变化,根据左手定则可知,导体棒经过B点和B点关于P点的对称点时,
电流方向不同,根据u=BLv⊥ 可知,导体棒两端的电势差u随时间t变化的图像为余弦图像,
故选C。]
例2 D [t=0时,线圈位于与中性面垂直的位置,故A错误;线圈转动的周期为T==0.2
s,t=0.05 s时,线圈转过90°,到达中性面位置,此时磁通量最大,感应电流为零,故B错
误;感应电动势最大值为E =NBS ω,S =ab·bc,N(ab+bc)×2=60 m,2ab=bc,联立可得
m0 0 0
E =2π V,线圈从题图位置(平行于磁场方向)开始转动,因此感应电动势的瞬时值表达式为
m0
e=2πcos 10πt (V),故C错误;当ab=ad时,边长相等,此时线圈面积最大,又 E =
m
NBSω,则感应电动势最大,即感应电动势的有效值最大,故D正确。]
拓展 (1)0~0.05 s过程中,穿过线圈的磁通量逐渐增大,磁通量变化率逐渐减小。
(2)
(3)1匝线圈周长为0.6 m,ab=ad时,边长L=0.15 m,E =NBL2ω=2.25π(V),得e=E sin
m m
ωt=2.25πsin 10πt (V)。
例3 BD [金属框转动一周电流方向改变两次,A项错误;因除电阻R外其他电阻不计,R
两端电压就等于电动势,所以电动势最大值为U ,B项正确;根据q=t=t=可知,金属框
m
转动半周,穿过金属框的磁通量的改变量为 2BL2,流过电阻的电荷量为,转动一周流过电
阻的电荷量为q=2×=,C项错误;电阻R两端电压的有效值U=,U =BL2ω,T=,又Q
m
=T,联立解得Q=,D项正确。]
拓展 (1)
(2)
解析 (1)交流电压表示数为电压有效值E=
(2)转动180°的过程中,金属框产生的焦耳热Q =()2·R·=。根据功能关系,外力做的功等
内
于产生的总焦耳热,即除安培力以外的力对金属框做的功为。
例4 (1)见解析图 (2)A
解析 (1)题图甲中OO′轴的右侧有磁场,所以线框只在半个周期内有感应电流产生,感应电流随时间变化的图像如图(a);题图乙中整个空间均有磁场,线框中产生的感应电流随时
间变化的图像如图(b)。
(2)交流电流表测的是有效值,图(a):由()2·R·=I2RT,得I=。图(b):I′=,故I∶I′=
1∶,A正确。
第 2 课时 变压器 远距离输电
实验十五:探究变压器原、副线圈电压与匝数的关系
例1 (1)A (2)C (3)ABD
(4)①变压器原、副线圈的电压之比等于匝数之比 ②有漏磁、铁芯发热、导线发热等
解析 (1)本实验要通过改变原、副线圈匝数,探究原、副线圈的电压比与匝数比的关系,
实验中需要运用的科学方法是控制变量法,故选A。
(2)变压器铁芯的材料要选择磁性材料,为减小涡流影响,选择用绝缘的硅钢片叠成的铁芯,
故C正确,A、B、D错误。
(3)变压器改变的是交流电压,因此为了人身安全,原线圈两端只能使用低压交流电源,所
用交流电压不超过12 V,A正确;为了保证人身安全,变压器通电后不要用手接触裸露的
导线或接线柱,B正确;变压器开始正常工作后,通过电磁感应将电能从原线圈传递到副线
圈,C错误;使用多用电表测电压时,先用最大量程挡试测,再选用恰当的挡位进行测量,
D正确。
(4)①根据表中数据,在误差允许的范围内基本符合变压器原、副线圈的电压之比等于匝数
之比,即有=;
②由于变压器不是理想变压器,有漏磁、铁芯发热、导线发热等能量损耗,因此变压器输出
电压比理论值偏小。
例2 D [变压器的输入电压为220 V,原线圈的交流电的电压与时间成余弦函数关系,故
输入交流电压的最大值为220 V,根据理想变压器原线圈与单匝线圈的匝数比为=,解得原
线圈为2 200匝,A错误;当原线圈输入电压为220 V时,BC间的电压为U ==12 V,故
BC
BC间的线圈与单匝线圈匝数关系为=,则BC间的线圈匝数为
120匝,流过R的电流为I ===1 A,B错误;若将R接在AB两端,根据题图可知,当原
BC线圈输入电压为220 V时,AB间的电压应该为18 V,根据交流电原线圈电压的表达式可知
ω=100π rad/s,故交流电的频率为f===50 Hz,C错误;若将R接在AC两端,根据题图
可知,当原线圈输入电压为220 V时,AC间的电压应该为30 V,根据欧姆定律可知,流过
电阻R的电流为I == A=2.5 A,交流电的周期为T==0.02 s,D正确。]
AC
例3 B [根据原、副线圈电压、电流的关系有=k=,==4,在原线圈回路中,有U =
0
IR+U,在副线圈回路中,有U=IR ,R=8R,联立解得I=,U=,故选B。]
1 1 1 2 2 1
例4 A [由于原线圈所接电压恒定,匝数比恒定,故变压器副线圈的输出电压恒定,滑动
变阻器的滑片从a端向b端缓慢移动的过程中,由数学知识可知,变压器副线圈所接的电阻
值逐渐增大,则由欧姆定律得I =,可知副线圈的电流逐渐减小,由=,可知变压器原线圈
2
的电流I 也逐渐减小,故A正确,B错误;原线圈的输入功率为P =UI ,由于I 逐渐减
1 入 1 1 1
小,则原线圈的输入功率逐渐减小,故C错误;滑片从a端向b端滑动时,副线圈干路电流
减小,滑动变阻器右半部分和定值电阻并联的总电阻减小,则并联部分分压减小,由 P =
R
知,定值电阻R消耗的功率减小,故D错误。]
例5 A [b为原线圈的中心抽头,单刀双掷开关与b连接时灯泡L 恰好正常发光,灯泡L
1 1
的额定电压为55 V,说明副线圈电压为55 V,原线圈c、d电压由题图乙可得U≈220 V,
1
则∶n =U∶U ,解得n∶n =8∶1,故A正确;由题图乙可得交流电的周期为0.02 s,一
2 1 2 1 2
个周期内交流电方向改变两次,可知1秒内流过灯泡L 的电流方向改变100次,故B错误;
2
当单刀双掷开关与b连接时,向上移动滑片P,滑动变阻器接入电路中的阻值增大,副线圈
所在回路中的总电阻值增大,副线圈电压不变,副线圈回路中的总电流减小,灯泡 L 两端
1
的电压等于副线圈两端的电压,故灯泡L 正常发光,通过灯泡L 的电流减小,因此L 将变
1 2 2
暗,故C错误;当单刀双掷开关由b扳向a时,接入电路的原线圈的匝数增大,原线圈与副
线圈的匝数比增大,则副线圈两端的电压减小,副线圈中的总电流减小,导致原线圈中的电
流减小,则接在原线圈回路中的电流表的示数减小,故D错误。]
例6 AD [由输电电流I=知,输送的电功率不变,输电电压加倍,输电电流变为原来的,
损耗的电功率ΔP=I2r,故输电电压加倍,损耗的电功率变为原来的,即 ΔP′=ΔP;输电
线上损失电压为ΔU=Ir,则输电电压加倍,损失电压变为原来的,即ΔU′=ΔU。故A、D
正确。]
例7 B [由于输电过程中电阻R要产生热量,会损耗功率,故T 输出功率大于T 输入功
1 2
率,T 输出电压大于T 输入电压,故A错误,B正确;由于输入电压不变,所以变压器 T
1 2 1
的输出电压不变,随着用户接入的用电器增多,导致用户端的等效电阻变小,则用户端电流
变大,输电电路电流也相应变大,根据P =I2R可知R功率增大,故C错误;用户接入的
损
用电器增多,用电器消耗功率增大,即T 输出功率增大,故D错误。]
2
拓展 增大
解析 T 输出功率(用户需要功率)决定输送功率,T 输出功率增大,则输送功率增大。
2 2例8 C [发电机输出的电流I== A=400 A,故A错误;输电线上损失的功率P =I 2R
1 线 线
=5 kW,所以I ==25 A,故B错误;用户得到的功率P =P-P =(100-5) kW=95
线 线 4 线
kW,则I== A= A≈432 A,故==,故C正确,D错误。]
4
第 3 课时 电磁振荡与电磁波
例1 C [O~a阶段,电容器正在放电,电流不断增加,电场能正在向磁场能转化,选项
A错误;a~b阶段,电容器正在充电,电流逐渐减小,磁场能正在向电场能转化,选项 B
错误;b~c阶段,电容器正在放电,回路中电流沿顺时针方向,选项C正确;c~d阶段,
电容器正在充电,回路中电流沿顺时针方向,选项D错误。]
例2 A [根据电流正在减小可以判断,此时电容器在充电,结合电流方向知电容器上极板
应该带负电,下极板带正电,在振荡电路中,当电容器充电时,电流减小但电流变化得越来
越快,即电流变化率增大;电容器上的电荷量增大,此时,磁场能转化为电场能,故 A正
确,C、D错误;由Q=CU可得,电容器电荷量增大,两极板间的电压也增大,故 B错
误。]
例3 C [以顺时针电流为正方向,LC电路中电流和电荷量变化的图像如图所示:
t=0.02 s时电容器下极板带正电荷且最大,根据图像可知周期为 T=0.04 s,故A错误;根
据图像可知电流最大时,电容器中电荷量为0,电场能最小为0,故B错误;1.01 s时,经
过25T,根据图像可知此时电流最大,电流沿逆时针方向,说明电容器放电完毕,电场能全
部转化为磁场能,此时磁场能最大,故C正确,D错误。]
例4 B [由振荡频率公式f=可知,要使频率提高到原来的2倍,则可以减小电容使之变
为原来的,或减小电感使之变为原来的,故B正确,A、C、D错误。]
例5 D [变化的电场与变化的磁场相互联系,它们统称为电磁场,选项 A错误;电磁波不
是机械波,传播不需要介质,选项B错误;电磁波在真空中的传播速度是3×108 m/s,选项
C错误;电磁波可在真空中传播,选项D正确。]
例6 AB
例7 B [蓝牙通信的电磁波是无线电波,不是可见光,故A错误;蓝牙通信的电磁波频率
高于手机通信的电磁波频率,所以在真空中蓝牙通信的电磁波波长比手机通信的电磁波波长短,故B正确;若两束蓝牙通信的电磁波频率相同,相位差恒定,就会发生干涉,故 C错
误;蓝牙通信的电磁波在真空中的传播速度等于光速,故D错误。]
第 4 课时 传感器
实验十六:利用传感器制作简单的自动控制装置
例1 ABC [声音使振动膜片振动,改变两极板间距离,使声音信号转换成电信号,则利
用电容传感器可制成麦克风,故A正确;由动量定理有F t=Δp,可得=F ,可知物体受
合 合
合外力越大,则动量变化越快,故B正确;人体可以向外界释放红外线,感应装置接收到
红外线后,可以开门,则利用红外传感器可制成商场的自动门,故C正确;牛顿运动定律
只适用于宏观低速问题,不适用于微观高速问题,而动量守恒定律既适用于低速宏观问题,
也适用于高速微观问题,故D错误。]
例2 C [由题意可知水位越高,对压力传感器的压力越大,压力传感器的电阻值越小。控
制开关自动开启低水位预警,此时水位较低,压力传感器的电阻值较大,由于a、b两端此
时的电压大于U ,根据串联电路电压分布特点可知,R 为压力传感器,故高水位时压力传
1 1
感器的电阻值变小,压力传感器R 两端电压变小,U>U ,A、B错误;根据闭合电路欧姆
1 1 2
定律可知,a、b两端的电压为U=R =,若定值电阻的阻值越大,当开启低水位预警a、b
1
两端的电压大于U 时,压力传感器阻值R 越大,水位越低;当a、b两端的电压小于U 开
1 1 2
启高水位预警时,压力传感器阻值R 越大,水位越低,C正确,D错误。]
1
例3 (1)c (2)150 (3)73
解析 (1)由题意可知,当控制电路电流达到20 mA时衔铁被吸合,制冷系统工作,所以题
图甲中,应将b端与c端相连。
(2)若设置电池温度为50 ℃启动制冷系统,由题图乙可知,当温度为50 ℃时,R的阻值为
t
100 Ω,此时控制电路的总电阻R===250 Ω,由串联电路的电阻规律,滑动变阻器接入的
电阻为R =R-R=250 Ω-100 Ω=150 Ω。
P t
(3)当滑动变阻器调到最大阻值200 Ω时,热敏电阻的阻值R′=R-R ′=250 Ω-200 Ω=
t P
50 Ω,由题图乙可知此时对应的温度为73 ℃,所以此时该电路可设置启动制冷系统的最高
温度是73 ℃。
例4 (1)可变电阻R 远大于
1
(2)-1.2
解析 (1)由题知恒压直流电源E的电动势不变,而用加热器调节R 的温度后,导致整个回
T
路的总电阻改变,而要确保电流表的示数仍为50.0 μA,则需控制整个回路的总电阻不变,故须调节可变电阻R。
1
连接电压表后,电流表示数显著增大,则说明电压表与R 并联后R 减小,则根据并联电阻
T 总
的关系有R ==,则要保证R 不变,须将原电压表更换为内阻远大于R 阻值的电压表。
总 总 T
(2)实验设定恒定电流为50.0 μA,由题图可得温度为35.0 ℃时电压表的电压为1.58 V,则根
据欧姆定律可知此时热敏电阻R =31.6 kΩ;温度为40.0 ℃时电压表的电压为1.28 V,则
T1
根据欧姆定律可知此时热敏电阻R =25.6 kΩ,则温度从35.0 ℃变化到40.0 ℃的过程中,
T2
R 的阻值随温度的平均变化率是k==-1.2 kΩ·℃-1,负号表示随着温度升高R 的阻值减小。
T T
例5 (1)1 000 (2) (3)见解析图 (4)1.7×10-2 (5)>
解析 (1)欧姆表读数为10×100 Ω=1 000 Ω
(2)当电压传感器读数为零时,C、D两点电势相等,则=,解得R =
F
(3)绘出U-m图像如图所示
(4)由图像可知,当电压传感器的读数为200 mV时,所放物体质量为1.75 g,则F =mg=
0
1.75×10-3×9.8 N≈1.7×10-2 N
(5)可将C、D以外的电路等效为新的电源,C、D两点电压看作路端电压,C、D接非理想
电压传感器,当读数为200 mV时,实际C、D间断路(接理想电压传感器时)时的电压大于
200 mV,则此时压力传感器的读数F>F。
1 0
阶段复习(五) 电磁感应和交变电流
规范训练 (1) (2)
(3)mv2
0
解析 (1)根据电阻定律有
R=R=ρ,R=2R=ρ
a b
可得S=2S
a b
根据m=2m=ρ′LS,m=ρ′LS
a a b b可得m=m=m
b a
a进入磁场的速度方向向右,b的速度方向向左,根据右手定则可知,a产生的感应电流方向
是E到F,b产生的感应电流方向是H到G,即两个感应电流方向相同,所以流过a、b的感
应电流是两个感应电流之和,则有E=2BLv,I=
0
对于b,根据牛顿第二定律有BIL=ma
b
联立解得在t=0时刻b棒的加速度大小为a=
(2)取向右为正方向,相距最近时,两棒具有相同速度,根据系统动量守恒有 2mv -mv =
0 0
(2m+m)v,解得v=,此时,电路中感应电流为0,a、b棒一起向右匀速运动,直到b棒出
磁场区域,之后b棒不受安培力、a棒受安培力减速直到停下;从b棒出磁场区域到a棒刚
好停止磁场边界处,对a棒运用动量定理得-BLΔt=0-2mv,又q=Δt=Δt=Δt==
联立解得两棒在整个过程中相距最近的距离为Δs=
(3)对a、b组成的系统,最终b棒一直做匀速直线运动,根据能量守恒定律有mv2=mv2+Q
0
总
对a、b,根据焦耳定律有Q=I2RΔt
因a、b流过的电流一直相等,所用时间相同,故a、b产生的热量与电阻成正比,即Q∶Q
a b
=1∶2,又Q+Q=Q ,联立解得b棒产生的焦耳热为Q=mv2
a b 总 b 0
第十四章 光
第 1 课时 光的折射、全反射
例1 C [根据折射定律有n=,且n>1,解得i>r ,所以折射光线向右偏折;根据折射定
1 1
律有n=,n=,根据几何关系可知r =r ,解得i =i ,所以出射光线与入射光线平行,故
1 2 1 2
选C。]
例2 BD [由于红光的折射率小于紫光的折射率,根据 v=,可知在冰晶内红光的传播速
度比紫光的大,故A错误;若题图乙中紫光满足θ =θ =60°,根据几何关系可知θ =30°,
1 3 2
则折射率为n=,代入数据解得n=,故B正确;保持入射角不变,将紫光改为红光,因紫光的折射率大于红光的折射率,则偏转角将减小,故C错误;根据光电效应方程有E =hν
km
-W 可知,由于红光频率小于紫光频率,且红光和紫光均能使同一金属产生光电效应,则
0
紫光对应的光电子最大初动能一定比红光的大,故D正确。]
例3 (1) (2)
解析 (1)作出光路图如图所示,设光线的入射角为α,出射角为β,则
由几何关系可得Rsin α=R
解得α=60°
由几何关系可知β=30°
由折射定律可知n==
(2)光在透明玻璃体中的传播速度v=
光在透明玻璃体中的传播时间t ==,由图及折射定律知光线从O 点出射后与竖直方向的
1 1
夹角α=60°,所以光从透明玻璃体出射后到光屏所用的时间t==,则光从入射点传播到光
2
屏所用的时间t=t+t=。
1 2
例4 (1)(2-)πR2 (2)
解析 (1)根据题意,设光发生全反射的临界角为C,由sin C=
解得C=30°
画出光路图,如图所示
光线①恰好发生全反射,发光区域是一个小的球冠,设小球冠高为h,由几何关系有cos 30°
=,
解得h=R
发光球面面积:
S=2πRh=(2-)πR2
(2)如图,大球冠底面所对的圆心角为120°,光束正中间的光线②直接穿过大球冠,通过大
球冠的路程为
x=R+Rcos 60°=R
光在玻璃球内的传播速度v=,所以该光束正中间的光线通过大球冠的时间为t===。例5 C [设光在该材料中传播速度为v,由L=vt,解得v==2.4×108 m/s,由n=,可知
n=1.25,设此光线发生全反射临界角为C,则sin C==0.8,光线刚好发生全反射时在透明
材料中的路程为s==7.5 m,则t′== s=3.125×10-8 s,故选C。]
例6 C [设光线在OQ界面的入射角为α,折射角为β,由几何关系可知α=30°,则由折
射定律可知n==,光线射出OQ界面的临界条件为恰好发生全反射,光路图如图所示,其
中CS⊥OB,光线在A、B两点发生全反射,由全反射规律sin C==可得,全反射的临界角
为45°,AB之间有光线射出,由几何关系可知AB=2AC=2CS=OS=d,故选C。]
例7 (1)45° (2)L
解析 (1)根据全反射规律可知,光线在AB面上P点的入射角等于临界角C,由折射定律得
sin C=①
代入数据得C=45°②
设光线在BC面上的折射角为r,由几何关系得r=30°③
根据光的折射定律n=④
联立③④式代入数据得i=45°⑤
(2)在△OPB中,根据正弦定理得
=⑥
设从入射到发生第一次全反射所用的时间为t,光线在介质中的传播速度为v,得=vt⑦
v=⑧
联立⑥⑦⑧式,代入数据解得t=L。
第 2 课时 光的干涉、衍射和偏振
例1 B [根据双缝干涉的条纹间距与波长关系有Δx=λ,由题图知Δx =2Δx ,则d =d
乙 甲 乙
,故选B。]
甲
例2 AB [薄膜干涉形成的条纹是膜的上下表面的反射光干涉产生的,根据干涉条件,入
射光C应采用单色光,波长一定,不会出现干涉条纹重合现象,若采用复合光则会出现干涉条纹重合的现象,选项A正确;干涉条纹是由A的下表面反射光和B的上表面反射光发
生干涉产生的,选项B正确;当A、B之间某处距离为入射光的半波长奇数倍时,则两列光
波的光程差为半波长的偶数倍,所以对应条纹是亮条纹,选项C错误;薄膜干涉是等厚干
涉,即亮条纹处空气膜的厚度相等,亮条纹右偏说明被检查物体表面上有凸起,选项 D错
误。]
拓展 密集 稀疏 右移
例3 C [薄膜干涉为前后两个面反射回来的光发生干涉形成干涉条纹,当入射光为复色光
时,出现彩色条纹。由于重力作用,肥皂膜前后表面的厚度从上到下逐渐增大,从而使干涉
条纹上疏下密,由于表面张力的作用,使得肥皂膜向内凹陷,故C正确,A、B、D错误。]
例4 AD [由折射定律可得,Ⅱ光的折射角小,折射率大,所以Ⅱ光的频率大,波长短,
故A正确;由n=得,Ⅰ光在棱镜中的传播速度比Ⅱ光的大,故B错误;干涉条纹间距与波
长成正比,Ⅱ光的波长短,故题图乙中a是Ⅰ光的干涉图样,故C错误;衍射图样中央亮条
纹宽度与波长成正比,故题图乙中c是Ⅰ光的衍射图样,故D正确。]
例5 (1)把自然光转换成偏振光
(2)横波 (3)ACD
解析 (1)自然光不是偏振光,但自然光通过偏振片后变为偏振光,故A的作用是把自然光
转换成偏振光。
(2)偏振现象证明光是一种横波。
(3)偏振片只能让一定偏振方向的光通过,没有样品时,要使到达 O处的光最强,偏振片
A、B的透光方向应相同;当放入样品时,由于样品的“旋光度”是α,即偏振方向不再与
B的透振方向平行,到达O处光的强度会减弱,A正确,B错误;偏振片B转过的角度等于
α,并使偏振片B的透振方向与偏振光的偏振方向平行时,光到达O处的强度将再次最大,
C正确;同理,D正确。
例6 C [太阳光射入六边形冰晶时,a光的折射角大于b光的折射角,由折射定律n=,冰
晶对a光的折射率小于对b光的折射率,由v=判断可知,在冰晶中,a光的传播速度较大,
故A正确;a光的折射率小于b光的折射率,故a光的频率小于b光的频率,由于c=λf,所
以a光的波长大于b光的波长,根据双缝干涉条纹间距公式Δx=λ知a光相邻条纹间距较大,
故B正确;由临界角公式sin C=可知,a光的折射率较小,a光的临界角较大,故C错误;
由于a光的波长大于b光的波长,根据单缝衍射实验中,入射光的波长越长,中央亮条纹越
宽,故a光中央亮条纹更宽,故D正确。]第 3 课时 实验十七:测量玻璃的折射率
实验十八:用双缝干涉测量光的波长
例1 (1)AD (2)D (3)
(4)偏小 不变
解析 (1)为了使作图误差更小,应选用两光学表面间距大的玻璃砖,A正确;根据折射定
律可知,如果两个光学面不平行,不影响入射角与折射角的值,所以对折射率的测定结果不
产生影响,B错误;为了准确测量光路图,应选用较细的大头针来完成实验,若选用粗的大
头针完成实验,容易出现观察误差,从而造成测量误差,C错误;插在玻璃砖同侧的两枚大
头针之间的距离应适当大些,引起的角度误差会减小,D正确。
(2)由题图可知,选用的玻璃砖两光学表面平行,则入射光线应与出射光线平行,B、C错误;
又光线在玻璃砖中与法线的夹角应小于光线在空气中与法线的夹角,A错误,D正确。
(3)由折射定律可知n===。
(4)如图,甲同学在测定折射率时,作出的折射光线如图中虚线所示,实线表示实际光线,
可见测量的折射角偏大,则由折射定律n=可知,测量的折射率n比真实值偏小。用题图②
测折射率时,只要操作正确,折射率的测量值与玻璃砖形状无关,故乙同学测得的折射率与
真实值相比不变。
例2 (1)(或) - (2)1.50 (3)偏小
解析 (1)圆周上的刻度被平分为60等份,则每个刻度表示的弧度为=,根据圆周上的读数
可得,入射角i=,折射角γ==-
(2)sin i-sin γ图像的斜率表示玻璃砖的折射率,则有n===1.50
(3)若入射光线发生如题图甲中虚线AB所示的偏离,则入射角的测量值偏小,折射率的测量
值偏小。
例3 (1)单缝 双缝 滤光片 (2)D
(3)2.332(2.331、2.333均可)
15.325(15.324、15.326均可)
6.5×10-7 (4)减小
解析 (1)观察单色光的双缝干涉图样实验中,通过滤光片获得单色光,通过单缝获得线光源,通过双缝获得相干光,故光具座上先放置b单缝和c双缝,再放置a滤光片,就可以观
察到单色光的双缝干涉图样。
(2)若要使得分划板中心刻线与干涉条纹平行,则仅旋转毛玻璃处的测量头即可,故选D。
(3)由题图甲可知示数为
2 mm+0.332 mm=2.332 mm(2.331、2.333均可)
由题图乙可知示数为15 mm+0.325 mm=15.325 mm(15.324、15.326均可)
由Δx=λ得λ==
m
≈6.5×10-7 m
(4)若仅将红色滤光片更换为蓝色滤光片,则λ减小,由Δx=λ可知相邻亮条纹中心间距减小。
例4 (1)S′ (2)6×10-7 (3)AC
解析 (1)如果S被视为其中的一个缝,S′相当于另一个“缝”。
(2)第3条亮条纹中心到第12条亮条纹中心的间距为22.78 mm,则相邻亮条纹间距为Δx=
m≈2.53×10-3 m,等效双缝间的距离为d=2h=0.30 mm=3.0×10-4 m,根据双缝干涉条
纹间距公式Δx=λ,有λ=Δx= m≈6×10-7 m。
(3)根据双缝干涉条纹间距公式Δx=λ可知,仅增大D、仅减小d或仅增大波长λ都能够增大
光屏上相邻两条亮条纹之间的距离,所以A、C正确。
第十五章 热学
第 1 课时 分子动理论 内能 固体和液体
例1 B [由于气体分子间的距离较大,所以气体分子的体积V 远小于摩尔体积与阿伏加德
0
罗常数之比,即V<,所以N <,故A错误;阿伏加德罗常数等于气体的摩尔质量与气体分
0 A
子质量之比,即N ==,故B正确,C错误;气体密度与单个分子体积的乘积不等于单个
A
气体分子的质量,故D错误。]
例2 (1) (2)
解析 (1)体积为V的气凝胶质量为m=ρV,故可知含有的分子数为n=·N =
A
(2)1 mol气凝胶的体积为V =
mol
1 mol气凝胶包含N 个分子,故每个气凝胶分子的体积为V=,同时有V=π·()3,联立解得
A 0 0
每个气凝胶分子的直径为d=。
例3 D [这一现象是因为墨水中添加物的布朗运动,根本原因是分子的热运动,故A、
B、C错误;温度越高,分子的热运动越剧烈,故将杯中的冷水换成热水,这一过程会进行的更迅速,故D正确。]
例4 D [布朗运动是悬浮在液体或气体中的固体颗粒,受到液体或气体分子的无规则撞击
所做的无规则运动,用肉眼无法观察到布朗运动,沙尘暴的运动是气流运动形成的,不是布
朗运动,故A错误;内能的宏观表现是温度,温度越高,内能越大,故B错误;氧气分子
尺寸的数量级为10-10 m,而PM2.5颗粒直径小于或等于2.5 μm,故C错误;PM2.5在空气
中的运动是布朗运动,由空气中大量空气分子无规则运动对其撞击的不平衡性引起的,故D
正确。]
例5 C [分子间距离大于r 时,分子力表现为引力,分子从无限远靠近到距离r 处过程中,
0 0
引力做正功,分子势能减小,在r 处分子势能最小,分子间距离继续减小,分子力表现为斥
0
力,分子力做负功,分子势能增大,C正确。]
例6 B [温度是分子平均动能的标志,温度升高,分子的平均动能增大,故热水分子的平
均动能比水蒸气的小,故A错误;内能与物质的量、温度、体积有关,相同质量的热水和
水蒸气,热水变成水蒸气,温度升高,分子总动能增加,体积增大,分子间平均距离变大,
分子总势能增大,故热水的内能比相同质量的水蒸气的小,故B正确;温度越高,分子热
运动的平均速率越大,45 ℃的热水中的分子平均速率比100 ℃的水蒸气中的分子平均速率
小,由于分子运动是无规则的,并不是每个分子的速率都小,故C错误;温度越高,分子
热运动越剧烈,故D错误。]
例7 D [新材料由多层石墨烯叠加而成,可知结构规则的新材料为晶体,晶体具有固定的
熔点,故A、B错误;由分子动理论可知,分子做永不停息的无规则运动,故 C错误;层与
层间距约为六边形边长的两倍,远大于分子间距离,由分子力的特点可知,层间相邻碳原子
间作用力表现为引力,故D正确。]
例8 B [因为液体表面张力的存在,水黾才能在水面上行走自如,故A错误;将棉线圈中
肥皂膜刺破后,扩成一个圆孔,是表面张力作用的结果,故B正确;液晶显示器是利用液
晶光学性质具有各向异性的特点制成的,故C错误;从题图丁中可以看出酱油与左边材料
浸润,与右边材料不浸润(不浸润液滴会因为表面张力呈球形),故D错误。]
第 2 课时 实验十九:用油膜法估测油酸分子的大小
实验二十:探究等温情况下一定质量气体压强与体积的关系
例1 (1)4.6×10-2 4.3×10-10
(2)C (3)AC
解析 (1)一滴油酸酒精溶液中油酸的体积为V=× mL=2×10-11 m3,根据大于半个方格的计为一个,小于半个方格的不计的原则,可得油膜形状占据的方格数约为 N=115格,所
以油膜的面积为S=115×202×10-6 m2=4.6×10-2 m2,所以油酸分子的直径为d== m
=4.3×10-10 m
(2)实验中把分子看作小球,认为油酸分子能够一个一个紧密排列,在水面上形成单分子层
油膜,是采用了理想模型法,C正确。
(3)计算油酸分子直径的依据是d=。油酸未完全散开,则测得的油膜面积所占方格数目偏少,
所以导致油酸分子直径计算值偏大,A正确;油酸酒精溶液浓度计算值低于实际值,则一滴
溶液中纯油酸计算体积偏小,导致油酸分子直径计算值偏小,B错误;计算油膜面积时,舍
去了所有不足一格的方格,则测得的油膜面积所占方格数目偏少,所以导致油酸分子直径计
算值偏大,C正确;求每滴溶液体积时,1 mL的溶液的滴数多记了10滴,则导致一滴溶液
体积计算值偏小,则一滴溶液中纯油酸体积计算值偏小,导致油酸分子直径计算值偏小,D
错误。
拓展 B [设一个油酸分子体积为V,则V=π()3,由N =可知,要测定阿伏加德罗常数,
A
还需知道油酸的摩尔体积,故B正确。]
例2 (1) B (2)2.04×105 (3)增大
解析 (1)在实验误差允许范围内,题图乙中的拟合曲线为一条过原点的直线,说明在等温
情况下,一定质量的气体,p与成正比。故选B。
(2)若气体被压缩到V=10.0 mL,则有= mL-1=100×10-3 mL-1,由题图乙可读出封闭气
体压强为p=2.04×105 Pa
(3)某组同学进行实验时,一同学在记录数据时漏掉了ΔV,则在计算pV乘积时,根据p(V
0
+ΔV)-pV =pΔV,可知他的计算结果与同组正确记录数据同学的计算结果之差的绝对值会
0
随p的增大而增大。
例3 (1)AC (2)p-
0
(3)橡皮帽内气体体积 升高 增大
解析 (1)每挂上一个钩码,平衡后,待封闭气体的体积不再发生变化,再读出体积,可以
减小误差,故A正确;挂钩码时,不能用手紧紧握住注射器,因为手的温度会改变封闭气
体的温度,使测量结果不准确,故B错误;实验前,应在活塞上涂上润滑油,并来回拉动
几次,可以增加密封性,也可以减小摩擦带来的误差,故C正确;注射器不隔热,所以实
验时封闭气体的温度与外界温度相同,气体做等温变化,不需要测量温度,故D错误。
(2)由平衡关系可得nmg+p=p,可得p=p-。
0 0
(3)实验操作规范,图线不过原点,则b代表注射器橡皮帽内气体的体积;由=C可知V=
CT,体积增大到一定值后,图线开始偏离直线,向上偏离,斜率变大,说明可能是温度升
高;公式中的C与气体质量成正比,斜率变大,也可能是由于装置气密性不好导致气体质
量增大。例4 (1)AC (2) (3)b b+V
0
解析 (1)该气体发生等温变化,从注射器的刻度上读出体积,因此传感器 A为压强传感器,
A正确;在步骤①中,将注射器与传感器A连接前,应使注射器封住一定质量的气体,因
此不应将活塞移至注射器最右端,B错误;操作中,不可用手握住注射器封闭气体部分,是
为了保持封闭气体的温度不变,C正确;若实验过程中不慎将活塞拔出注射器,气体的质量
发生变化,因此以上数据全部作废,应重新做实验,D错误。
(2)作出图像为一条直线,根据玻意耳定律pV=C可得V=C,故x轴应为。
(3)设石子体积为V,若不考虑传感器和注射器连接处的软管容积带来的误差,对一定质量
1
的气体根据玻意耳定律可得p(V-V)=C,整理得V=+V,可得V=b;若考虑该误差影响
1 1 1
则表达式为p(V+V-V)=C,整理得V=+V-V,可知V-V=b,故V=b+V。
0 1 1 0 1 0 1 0
第 3 课时 气体的性质
例1 甲:p- 乙:p+
0 0
丙:p-ρgh 丁:p+ρgh
0 0 1
戊:p-ρgh
0
己:p=p+ρg(h-h-h)
a 0 2 1 3
p=p+ρg(h-h)
b 0 2 1
解析 题图甲:选汽缸为研究对象,受力分析如图(a)所示,由平衡条件知pS=p S+Mg,
0 甲
得p =p-。
甲 0
题图乙:选活塞为研究对象,受力分析如图(b)所示
由平衡条件,有p S sin α=pS +F +mg,F =Mg,S sin α=S ,
乙 下 0 上 N N 下 上
S 为活塞下表面面积,S 为活塞上表面面积,即S =S,
下 上 上
由以上得p =p+。
乙 0
题图丙中,以B液面为研究对象,由平衡条件有p S+ρghS=pS,
丙 0
所以p =p-ρgh
丙 0
题图丁中,以A液面为研究对象,由平衡条件有p S=pS+ρgh S
丁 0 1
所以p =p+ρgh
丁 0 1
题图戊中,以B液面为研究对象,由平衡条件有p S+ρghsin 60°·S=pS
戊 0
所以p =p-ρgh
戊 0
题图己中,从开口端开始计算,右端大气压强为p,同种液体同一水平面上的压强相同,所
0
以b气柱的压强为p =p +ρg(h -h),故a气柱的压强为p =p -ρgh =p +ρg(h -h -
b 0 2 1 a b 3 0 2 1
h)。
3
例2 (1)T (2)
1
解析 (1)活塞被卡子托住前,气体经历等压变化,设活塞刚刚接触卡子时气体的温度为
T,
2
根据盖—吕萨克定律有=
式中V=SL,V=SL
1 1 2 2
根据题意L=(1-)L=L
2 1 1
联立解得T=T
2 1
(2)活塞被卡子托住后,再降低温度,气体经历等容变化,根据查理定律有=,式中p=p,
3 0
根据力的平衡条件有p=p=p+
2 1 0
联立可得T=。
3
例3 (1)30 cm (2)374 K
解析 (1)设抽出的水银长度为Δh,设管的横截面积为S,A部分气体初始压强为p,水银密
1
度为ρ,则有p+ρgh =p+ρgh ,解得p=104 cmHg
1 1 0 2 1
液面相平时,设A部分气体压强为p,p=p+ρg(h-Δh)
2 2 0 2
对A气体,根据玻意耳定律可得
pLS=p(L+)S
1 1 2 1
联立解得Δh=30 cm
(2)若仅缓慢加热A部分气体,使下方液柱左右液面相平,根据理想气体状态方程有=
其中T=(-3+273) K=270 K,
1
p′=p+ρgh =108 cmHg,
2 0 2
解得T≈374 K。
2
例4 (1)5×104 Pa (2)266 K
解析 (1)氦气温度不变,则发生的是等温变化,设氦气在目标位置的压强为 p ,由玻意耳
1
定律得pV =p·1.5V ,解得p =p ,由目标处的内外压强差可得p -p=p ,解得p=p =
0 0 1 0 1 0 1 0 0
5×104 Pa
(2)由胡克定律F=kx可知弹簧的压缩量变为原来的,则活塞受到弹簧的压强也变为原来的,
即p=p×=p 。设此时氦气的压强为p ,活塞两侧压强相等,可得p =p+p=p ,由理想
x 0 0 2 2 x 0
气体状态方程可得=,其中V=V+0.5V×=V,解得T=T=266 K。
2 0 0 0 0
例5 C [方法一:根据气体实验定律分析:a→b过程中,气体压强不变,温度降低,根据盖—吕萨克定律=C得知,体积应减小,故
A错误;b→c过程中气体的温度保持不变,即气体发生等温变化,根据玻意耳定律 pV=C
得知,由于压强减小,故体积增大,故B错误;c→a过程中,由题图可知,p与T成正比,
则气体发生等容变化,体积不变,温度升高则压强增大,综上所述可知在b状态时,气体的
体积最小,故C正确,D错误。
方法二:根据图像斜率的意义分析:
由理想气体状态方程=C得:p=T,斜率k=,即某状态(点)与原点连线斜率越大,体积V
越小,故从图可以看出V=V>V,温度可由图像直观反映出来。]
a c b
思考
第 4 课时 专题强化:气体实验定律的综合应用
例1 (1)15 cm (2)(9-45) cm
解析 (1)设管的横截面积为S,调整N的高度后,M管中气体压强为p 。对M管中封闭气
2
体有,
状态Ⅰ:p=75 cmHg,
1
V=54 cm×S,T=300 K
1 1
状态Ⅱ:T=T=300 K,
2 1
V=54 cm×S-9 cm×S=45 cm×S
2
由玻意耳定律得pV=pV,解得p=90 cmHg
1 1 2 2 2
此时M、N两玻璃管中气体压强差
Δp=p-p=15 cmHg
2 0
故固定M、N时两玻璃管中水银面高度差为Δh=15 cm。
(2)M中气体温度升高至T=360 K时,设N中水银面升高x,则对M管中封闭气体有
状态Ⅲ:V=(45 cm+x)S,
3
T=T=360 K,p=p+p +p
3 3 0 Δh 2x
由理想气体状态方程得=解得x=(9-45) cm。
例2 (1)V (2)
解析 (1)设外界大气压强为p ,封闭气体在状态1、2(活塞再次平衡)的压强分别为p 、p ,
0 1 2
从状态2到状态3(活塞第三次达到平衡),封闭气体发生等压变化,由盖—吕萨克定律有=,
将V=V,T=T,T=T代入解得V=V
2 2 3 3
(2)从状态1到状态2,气体发生等温变化,由玻意耳定律有pV=pV
1 1 2 2
将V=V,V=V代入得p=p
1 2 1 2
状态1,由力的平衡条件有pS+mg=pS
0 1
状态2,由力的平衡条件有pS+mg=pS+F
0 2
代入数据解得p=。
0
例3 (1)2p p (2)
0 0
解析 (1)旋转过程,上部分气体发生等温变化,根据玻意耳定律可知p·SL =p·SL ,解得
0 0 1 0
旋转后上部分气体压强为p =2p 。旋转过程,下部分气体发生等温变化,下部分气体体积
1 0
增大为SL+SL=SL,则p·SL=p·SL,解得旋转后下部分气体压强为p=p
0 0 0 0 0 2 0 2 0
(2)对“H”型连杆活塞整体受力分析,活塞的重力mg竖直向下,上部分气体对活塞的作用
力竖直向上,下部分气体对活塞的作用力竖直向下,大气压力上下部分抵消,根据平衡条件
可知pS=mg+pS,解得活塞的质量为m=。
1 2
例4 p =74.36 cmHg
A
p =54.36 cmHg
B
解析 设B管在上方时上部分气体压强为 p ,下部分气体压强为p ,此时有p =p +20
B A A B
cmHg,倒置后A管气体压强变小,即空气柱长度增加1 cm,A管中水银柱长度减小1 cm,
又因为S =4S ,可知B管中水银柱长度增加4 cm,空气柱长度减小4 cm;设此时两管的压
A B
强分别为p ′、p ′,所以有p ′+23 cmHg=p ′。倒置前后温度不变,根据玻意耳定律
A B A B
对A管内空气柱有p S L =p ′S L ′,对B管内空气柱有p S L =p ′S L ′,其中L ′
A A A A A A B B B B B B A
=10 cm+1 cm=11 cm,L ′=10 cm-4 cm=6 cm
B
联立以上各式解得p =74.36 cmHg,p =54.36 cmHg。
A B
第 5 课时 专题强化:理想气体的变质量问题
例1 10次
解析 充气过程气体温度不变,设充了n次,此时胎内气体压强为p,选最后胎内所有气体
1
为研究对象。根据玻意耳定律p(V+nV)=pV
0 0 1
室温变化后,胎内气体温度升高,在室外时不爆胎,可视为气体体积不变,根据查理定律=
根据题意T=(27+273)K=300 K,
1T=(37+273)K=310 K,p =4.50×105 Pa,联立解得n≈10(次)。
2 m
例2 (1) (2)[1-()n]pS
0
解析 (1)以助力气室内的气体为研究对象,则初态压强p 、体积V ,第一次抽气后,压强
0 0
p、气体体积V=V+V,根据玻意耳定律pV=pV,解得p=
1 0 1 0 0 1 1
(2)同理第二次抽气pV=pV
1 0 2
解得p==()2p
2 0
以此类推……
则当n次抽气后助力气室内的气体压强p =()np ,则刹车助力系统为驾驶员省力大小ΔF=
n 0
(p-p)S=[1-()n]pS。
0 n 0
例3 (1)2.2p (2)
0
解析 (1)假设窑内温度为387 ℃时,排气阀未开启,则气体升温过程中发生等容变化,根
据查理定律有=,解得p=2.2p<2.4p,则假设成立;
1 0 0
(2)设窑内气体温度为927 ℃,压强为2.4p 时,体积为V,根据理想气体状态方程有=,
0 2
解得V=
2
排出气体的体积为V =V-V
排 2 0
则排出气体质量与窑内原有气体质量的比值为η==,解得η=。
例4 (1)1.1×105 Pa (2)见解析
解析 (1)气闸舱抽气过程中
pV =p (V +V )
0 气 气 气 抽
得抽出的气体体积V ≈6.43 m3
抽
把这部分气体充进工作舱后,求工作舱气压可由下列两种方法:
方法一:转化法:
先将p =0.7×105 Pa,V =6.43 m3的气体转化为压强为p 、体积为V的气体。对于被抽
气 抽 0
出的气体,p V =pV,向工作舱排气过程,pV +pV=p V
气 抽 0 0 工 0 工 工
解得p ≈1.1×105 Pa,p 为换气结束后气体稳定后的压强。
工 工
方法二:利用克拉伯龙方程:
p(V +V )=p V +p V
0 工 气 工 工 气 气
将p=1×105 Pa,p =0.7×105 Pa
0 气
V =60 m3,V =15 m3,
工 气
代入得p ≈1.1×105 Pa,p 为换气结束后工作舱中气体压强。
工 工
(2)气闸舱剩余气体对舱门B的压力为F=,其中d=1 m,代入数据解得F≈5.5×104 N,可
以再次减小气闸舱内压强后,减小开门的阻力。
例5 (1)21 ℃ (2)124
解析 (1)大钢瓶的容积一定,从北方到该市对大钢瓶内气体,有=解得T=294 K,故t=21 ℃
2 2
(2)方法一:转化法
设大钢瓶内氧气由状态p、V 等温变化为停止分装时的状态p、V,
2 2 3 3
则p=1.26×107 Pa,V=0.04 m3,p=2×105 Pa
2 2 3
根据pV=pV 得V=2.52 m3
2 2 3 3 3
可用于分装小钢瓶的氧气p=2×105 Pa,V=(2.52-0.04) m3=2.48 m3
4 4
分装成小钢瓶的氧气p=4×105 Pa,V=nV,其中小钢瓶体积为V=0.01 m3
5 5
根据pV=pV 得n=124,即一大钢瓶氧气可分装124个小钢瓶。
4 4 5 5
方法二:利用克拉伯龙方程:
pV=p′V+p·nV
2 2 2 2
其中p =1.26×107 Pa,V =0.04 m3,V=0.01 m3,p=4×104 Pa,p′=2×105 Pa,将数
2 2 2
据代入上式得n=124,即一大钢瓶氧气可分装124个小钢瓶。
第 6 课时 热力学定律与能量守恒定律
例1 B [由于爬山过程中气体体积不变,故气体不对外做功,故A错误;爬山过程中温度
减小,则气体内能减小,故B正确;根据热力学第一定律可知ΔU=W+Q,爬山过程中气
体不做功,但内能减小,故可知气体放出热量,故C错误;爬山过程中氧气瓶里的气体容
积、质量均不变,温度减小,根据理想气体状态方程=C,可知气体压强减小,故 D错
误。]
例2 AD [设理想气体初始状态的压强、体积和温度分别为p =p ,V =V ,T =300 K,
1 0 1 0 1
等容过程为状态二V =V =V ,T =400 K,等压过程为状态三p =p ,V =?,T =400
2 1 0 2 3 0 3 3
K,由理想气体状态方程可得,==,解得 p =p ,V =V ,等压过程中,气体体积增加了
2 0 3 0
原体积的,C错误;等容过程中气体做功为零,由热力学第一定律 ΔU=W+Q=400 J,两
个过程的初末温度相同即内能变化相同,因此内能增加都为400 J,D正确;等压过程内能
增加了400 J,吸收热量为600 J,由热力学第一定律可知气体对外做功为200 J,即做功的
大小为W=p(V-V)=200 J,解得V=6 L,A正确,B错误。]
0 0 0 0
例3 B [根据热力学第二定律可知,热机的效率不可能达到100%,现代汽车技术已经非
常先进,但也不能够使气体燃烧释放的热量全部转化成机械能,A错误;气体燃烧过程符合
热力学第二定律,内能无法全部用来做功以转化成机械能,B正确;气体燃烧释放的热量没
有全部转化为机械能,该过程符合热力学第一定律,C错误;根据热力学第二定律可知,热
机的效率不可能达到100%,发动机工作时,就算没有漏气和摩擦,也没有发动机的热量损
失,燃料产生的热量也不能完全转化成机械能,D错误。]例4 AB [根据理想气体状态方程可知T=·V,即T-V图像的斜率为,故有p =p>p,故
a b c
A正确,C错误;理想气体由a变化到b的过程中,因体积增大,则气体对外做功,故 B正
确;理想气体由a变化到b的过程中,温度升高,则内能增大,由热力学第一定律有ΔU=
Q+W,而ΔU>0,W<0,则有ΔU=Q-|W|,可得Q>0,Q>ΔU,即气体从外界吸热,且从
外界吸收的热量大于其增加的内能,故D错误。]
例5 B [根据理想气体的状态方程=C,可知a→b气体温度升高,内能增加,即ΔU>0,
且体积增大,气体对外界做功,即W<0,由热力学第一定律ΔU=W+Q,可知a→b过程中
气体吸热,A错误,B正确;根据理想气体的状态方程=C,可知p-V图像的坐标值的乘积
反映温度,a状态和c状态的坐标值的乘积相等,而中间状态的坐标值乘积更大,则a→c过
程的温度先升高后降低,且状态b的温度最高,C错误;a→c过程气体体积增大,气体对外
界做正功,即外界对气体做负功,D错误。]
拓展 (1)4pV 吸收 4pV
0 0 0 0
解析 p-V图像与V轴所围的面积表示气体对外界做的功W ==4pV ;由图像知T=T,
ac 0 0 a c
故从a→c的过程中ΔU=0,因为气体对外界做功,W<0,由ΔU=W+Q知,Q>0,即气体
要吸收热量,吸收的热量Q=-W=4pV。
0 0
(2)吸收 2pV
0 0
解析 整个过程中气体对外界做的功大小等于△acd的面积,即W′=×2p×2V =2pV ,
0 0 0 0
又因ΔU=0,故气体吸收的热量Q=2pV。
0 0
例6 (1)300 K或27 ℃ (2)49.25 J
解析 (1)根据盖—吕萨克定律得=,可得T =300 K,即27 ℃
D
(2)汽缸内空气在等压膨胀过程中压强恒为p,活塞受力如图,由平衡条件得pS=mg+pS,
0
解得p=9.8×104 Pa,该过程中外界对气体做功W=-pΔV=-12.25 J,根据热力学第一定
律ΔU=W+Q,可得Q=49.25 J。
例7 (1)见解析 (2)120 J
解析 (1)状态Ⅰ状态参量:体积V=1 L,温度T=(273+27)K=300 K,
1
压强p=p=1.0×105 Pa
1 0
状态Ⅱ状态参量:体积V=2 L;
2
由于等压膨胀p=p=1.0×105 Pa
2 1
由等压变化规律=,解得T=2T=600 K
2 1
状态Ⅲ状态参量:T=300 K,
3
体积V=V=2 L
3 2
由等容变化可知=,
可得p=p=0.5×105 Pa
3 2
封闭气体的压强p随热力学温度T的变化图像为
(2)加热过程由热力学第一定律得ΔU=W+Q
1 1 1
外界对气体做功W=-pΔV=-1.0×105×1×10-3 J=-100 J
1 1 1
又Q=Q=220 J,可得ΔU=120 J,
1 1
汽缸冷却过程是等容变化,则W=0
2
内能变化ΔU=-ΔU=-120 J,
2 1
由ΔU=W+Q,可得Q=-120 J,则在汽缸冷却的过程气体放出的热量为120 J。
2 2 2 2
第十六章 近代物理
第 1 课时 能量量子化 光电效应
例1 AD [能完全吸收照射到它上面的各种频率的电磁波而不发生反射的物体称为黑体,
选项A正确;由题图可知,随着温度的降低,各种波长的光辐射强度都有所减小,选项 B
错误;随着温度的升高,黑体辐射强度的极大值向波长较短的方向移动,选项C错误;一
般物体辐射电磁波的情况除了与温度有关,还与材料的种类及表面情况有关,但黑体辐射电
磁波的情况只与它的温度有关,选项D正确。]
例2 (1) h (2)
解析 (1)由题意可知每个光子的动量为p=
每个光子的能量为E=hν=h
(2)太阳辐射的硬X射线光子以球面波的形式均匀地向各个方向辐射,以太阳为圆心,半径
为R的球面上每平方米面积上接收到的光子数相同,太阳每秒辐射光子的总能量E =P①
总
面积为S的镜头每秒接收到的辐射光子的能量E=·E =②
1 总
又E=Nhν=N③
1联立①②③解得P=。
例3 C [在P向b端移动的过程中,在到达O点之前,A极电势低于K极电势,随着P靠
近O,静电力对光电子做的负功越来越少,微安表的示数增大;过了O点之后,A极电势高
于K极电势,静电力对光电子做正功,微安表的示数增大,当达到饱和电流后微安表的示
数不再增大,A、B错误;A极电势逐渐升高,P到达O点前静电力对光电子做的负功减小,
过了O点后静电力对光电子做的正功逐渐增大,根据动能定理可知到达A极的光电子动能
不断增大,C正确;根据爱因斯坦光电效应方程E =hν-W ,可知K极逸出的光电子的最
k 0
大初动能不变,D错误。]
拓展 不变 不变 增大
例4 C [由题意可知,光子能量E== eV=6.2 eV,光子能量大于两种金属的逸出功,故
均能发生光电效应,A错误;截止频率只与金属自身的性质有关,与入射光的频率无关,B
错误;由爱因斯坦光电效应方程有E =E-W ,结合动能定理eU=E 得,铝的遏止电压为
k 0 c k
2 V,钙的遏止电压为3 V,则金属铝和金属钙的遏止电压之比为2∶3,故C正确,D错
误。]
例5 A [根据遏止电压与最大初动能的关系有eU=E ,根据爱因斯坦光电效应方程有
c kmax
E =hν-W ,当U 为0时,解得W =hν,A正确;钠的截止频率为ν,根据题图可知,
kmax 0 c 0 c c
截止频率小于8.5×1014Hz,B错误;根据上述分析,有U=ν-,可知题图中直线的斜率表
c
示,遏止电压U 与入射光频率ν成线性关系,不是正比,C、D错误。]
c
例6 D [甲光干涉条纹间距大说明甲光波长较长,频率低,使同一金属板发生光电效应时,
甲光对应的最大初动能小,所以遏止电压小,甲光应对应曲线C,据p=可知甲光的动量小,
故A、B错误;若想通过题图甲装置测得题图乙中的 U 和U ,需在光电管两端应加反向电
B C
压,A极板应接电源负极,K极板应接电源正极,故C错误;波长越长的光,对同一装置做
单缝衍射实验的现象越明显,甲光更容易发生明显衍射现象,故D正确。]
第 2 课时 波粒二象性 物质波 原子结构与玻尔理论
例1 D [显微镜的分辨率与使用光源(光子或电子)的波长成正比,则0.2 μm=k600 nm,2
nm=kλ,解得λ=6 nm,故A、B错误;由题意可知p′=1.1×10-27 N·s,λ′=600 nm,
则p===1.1×10-25 N·s,故C错误,D正确。]
例2 BD [根据动量的大小与动能的关系可知发射电子的动能约为E== J
k
≈8.0×10-17 J,故A错误;发射电子的物质波波长约为λ== m=5.5×10-11 m,故B正
确;物质波也具有波粒二象性,故电子的波动性是每个电子本身的性质,则每个电子依次通
过双缝都能发生干涉现象,只是需要大量电子显示出干涉图样,故C错误,D正确。]例3 D [题图(a)只有分散的亮点,表明光具有粒子性;题图(c)呈现干涉条纹,表明光具有
波动性,A、B错误,D正确;紫外线也具有波粒二象性,也可以观察到类似的图像,C错
误。]
例4 ABD [α粒子质量远大于电子质量,电子对α粒子速度的影响可以忽略,故A正确;
入射方向的延长线越接近原子核的α粒子,所受库仑力就越大,发生散射时的偏转角越大,
故B正确;α粒子散射类似于碰撞,根据实验数据无法确定各种元素原子核的质量,故 C错
误;由α粒子散射的实验数据可以估计出原子核半径的数量级是10-15 m,故D正确。]
例5 ACD [因在玻尔理论的跃迁公式hν==-E(-)中,若m=2即可变形为巴耳末公式
1
=R (-)(n=3,4,5,…)
∞
的形式,则巴耳末公式表示的是电子从高能级向量子数为2的低能级跃迁时发出的光谱线波
长,选项A正确,B错误;
若把巴耳末公式中的2换成1则计算所得的λ的值减小,即得到的是波长小于可见光的紫外
光区的谱线波长,选项C正确;
对比两式hν==-E(-)
1
=R (-)(n=3,4,5,…)
∞
可得R =-,选项D正确。]
∞
例6 C [从n=4跃迁到n=2能级时,辐射光子能量ΔE =-0.85 eV-(-3.40 eV)=2.55
1
eV,处于蓝光的能量范围,若使处于基态的氢原子被激发后只辐射蓝光,不辐射紫光,则
需激发氢原子到n=4能级,则激发氢原子的光子能量为ΔE=E-E=12.75 eV,故选C。]
2 4 1
例7 A [由题图可知①和③对应的跃迁能级差相同,可知①和③的能量相等,选项A正确;
因②对应的能级差小于④对应的能级差,可知②的能量小于④的能量,根据E=hν可知②的
频率小于④的频率,选项B错误;因②对应的能级差小于①对应的能级差,可知②的能量
小于①的能量,②的频率小于①的频率,则若用①照射某金属表面时能发生光电效应,用②
照射该金属不一定能发生光电效应,选项C错误;因④对应的能级差大于①对应的能级差,
可知④的能量大于①的能量,即④的频率大于①的频率,因用①照射某金属表面时能逸出光
电子的最大初动能为E,根据E=hν-W ,则用④照射该金属,逸出光电子的最大初动
k k 逸出功
能大于E,选项D错误。]
k
第 3 课时 原子核
例1 D [根据C→N+e,即C发生β衰变的产物是N,选项A错误;β衰变辐射出的电子
来自原子核内的中子转化为质子时放出的电子,选项B错误;半衰期是放射性物质的固有
属性,由原子核本身决定,与外界环境无关,选项 C错误;若测得一古木样品的C含量为活体植物的,可知经过了2个半衰期,则该古木距今约为5 730×2年=11 460年,选项D
正确。]
例2 BD [铀238发生α衰变的方程为U→Th+He,选项A错误;测得某岩石中现含有的
铀是岩石形成初期时的一半,即经过了一个半衰期,可推算出地球的年龄约为45亿年,选
项B正确;半衰期是大量原子核衰变的统计规律,对少数的原子核衰变不适用,选项 C错
误;铀238(U)最终衰变形成铅206(Pb),α衰变的次数=8次,β衰变的次数82+2×8-92=
6次,选项D正确。]
例3 C [根据题意设半衰期为t 的元素原子核数为x,另一种元素原子核数为y,有x+y=
0
N,经历2t 后有x+y=,
0
联立可得x=N,y=N,
在t=4t 时,原子核数为x的元素经历了4个半衰期,原子核数为y的元素经历了2个半衰
0
期,则此时未衰变的原子核总数为n=x+y=,故选C。]
例4 A [因为高温时才能使得粒子的热运动剧烈,才有可能克服它们自身相互间的排斥力,
使得它们间的距离缩短,才能发生核聚变,故A正确;核聚变中电荷是守恒的,故B错误;
因为太阳一直在发生核聚变,会放出大量能量,根据质能方程可知有质量亏损,故C错误;
核聚变的方程为H+H→He+n,题中为核裂变方程,故D错误。]
例5 A [根据电荷数和质量数守恒知,核反应方程为U+n→Ba+Kr+3n,故A符合题意
根据电荷数和质量数守恒知,核反应方程为U→Th+He,故B不符合题意;根据电荷数和
质量数守恒知,核反应方程为N+He→O+H,故C不符合题意;根据电荷数和质量数守恒
知,核反应方程为C→N+e,故D不符合题意。]
例6 D [设Y的电荷数和质量数分别为m和n,根据核反应方程中质量数和电荷数守恒可
知,第一个核反应方程的电荷数和质量数满足A+14=n+17,Z+7=m+8,第二个核反应
方程的电荷数和质量数满足n+7=2A,m+3=2Z,联立解得Z=2,A=4,故选D。]
例7 C [根据质能方程E=mc2可知,每秒平均减少的质量为Δm== kg= kg,则每秒平
均减少的质量量级为1029 kg,故选C。]
例8 BD [该反应前后质量亏损为Δm=m-m -m=131.037 21 u-131.031 86 u-0.000
I Xe e
549 u=0.004 801 u,
ΔE=Δmc2=0.004 801×931.5×106×1.6×10-19 J≈7.16×10-13 J,故A错误,B正确;放射
性元素I发生的衰变为β衰变,故C错误;由于半衰期为8天,可知经过16天,即经过两个
半衰期,75%的I原子核发生了衰变,故D正确。]
例9 B [原子核的比结合能越大,原子核就越稳定,A错误;一次“氦闪”放出的核能为
12×7.69 MeV-3×4×7.08 MeV=7.32 MeV,B正确;反应过程中释放能量,核子有质量
亏损,故氦4的核子平均质量大于碳12的核子平均质量,C错误;氦4的比结合能为7.08MeV,结合能为4×7.08 MeV=28.32 MeV,D错误。]

