文档内容
第十二章
简单机械
第 1 节 杠杆
一、杠杆
1.杠杆的定义:一根硬棒,在力的作用下如果能绕着__________转动,这根硬棒就叫做杠杆。在力的作用
下能绕固定点转动,这是杠杆的特点。杠杆有直的也有弯的。
2.杠杆的五要素
(1)支点:杠杆(撬棒)绕着__________的点,用字母O标出。
(2)动力:使杠杆转动的力。画力的示意图时,用字母F 标出。
1
(3)阻力:__________杠杆转动的力。画力的示意图时,用字母F 标出。注意:动力和阻力使杠杆转动方
2
向相反,但它们的方向不一定相反。
(4)动力臂:从支点到_______________的距离。用字母L 标出。
1
(5)阻力臂:从支点到_______________的距离。用字母L 标出。
2
二、杠杆平衡条件
1.动力×动力臂=阻力×阻力臂,公式:F×L=F×L 。
1 1 2 2
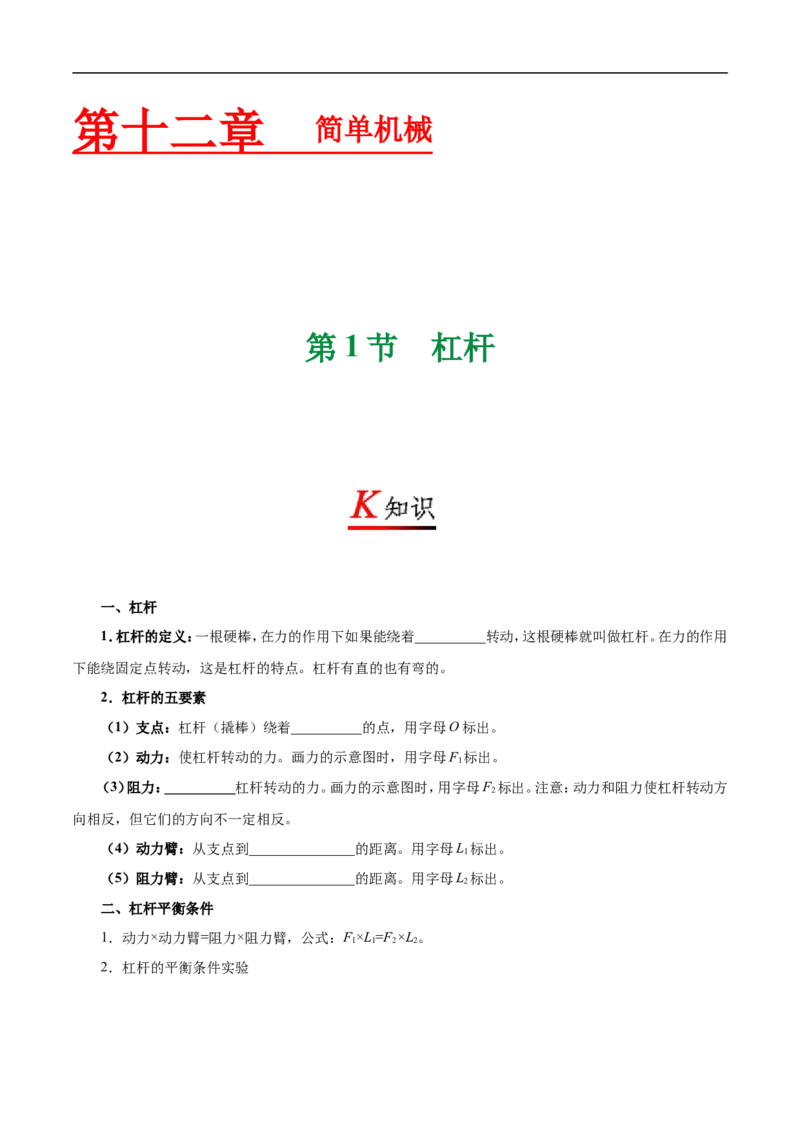
2.杠杆的平衡条件实验(1)首先调节杠杆两端的螺母,使杠杆在__________位置平衡。如图所示,当杠杆在水平位置平衡时,力
臂L 和L 恰好重合,这样就可以由杠杆上的刻度直接读出力臂的大小了,而图甲杠杆在倾斜位置平衡,读力
1 2
臂的数值就没有图乙方便。由此,只有杠杆在水平位置平衡时,我们才能够直接从杠杆上读出动力臂和阻力
臂的大小,因此本实验要求杠杆在水平位置平衡。
(2)在实验过程中绝不能再调节螺母。因为实验过程中再调节平衡螺母,就会破坏原有的平衡。
3.杠杆如果在相等时间内能转过相等的角度,即匀速转动时,也叫做杠杆的平衡,这属于“动平衡”。而
杠杆静止不动的平衡则属于“静平衡”。
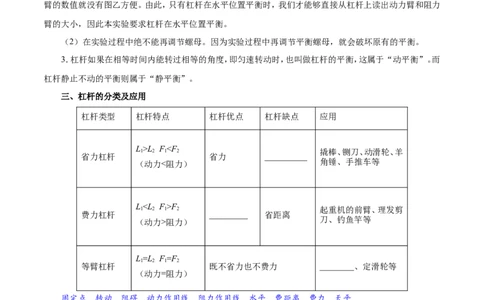
三、杠杆的分类及应用
杠杆类型 杠杆特点 杠杆优点 杠杆缺点 应用
L>L FF
1 2 1 2 起重机的前臂、理发剪
费力杠杆 _________ 省距离
刀、钓鱼竿等
(动力>阻力)
L=L F=F
1 2 1 2
等臂杠杆 既不省力也不费力 ________、定滑轮等
(动力=阻力)
固定点 转动 阻碍 动力作用线 阻力作用线 水平 费距离 费力 天平
一、力臂的画法
(1)找出支点并用O表示。提示:支点一定在杠杆上,可以在杠杆的某的端点,也可以在杠杆中间的某处。
在杠杆转动时这个点是相对固定的。
(2)通过力的作用点画出力的作用线。(3)从支点O向力的作用线作垂线。
(4)标力臂:用大括号或背向双箭头。
(5)省力杠杆中最小的力应是作用在杠杆端点的垂直于杠杆的力。
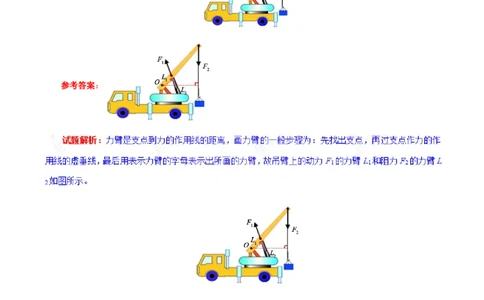
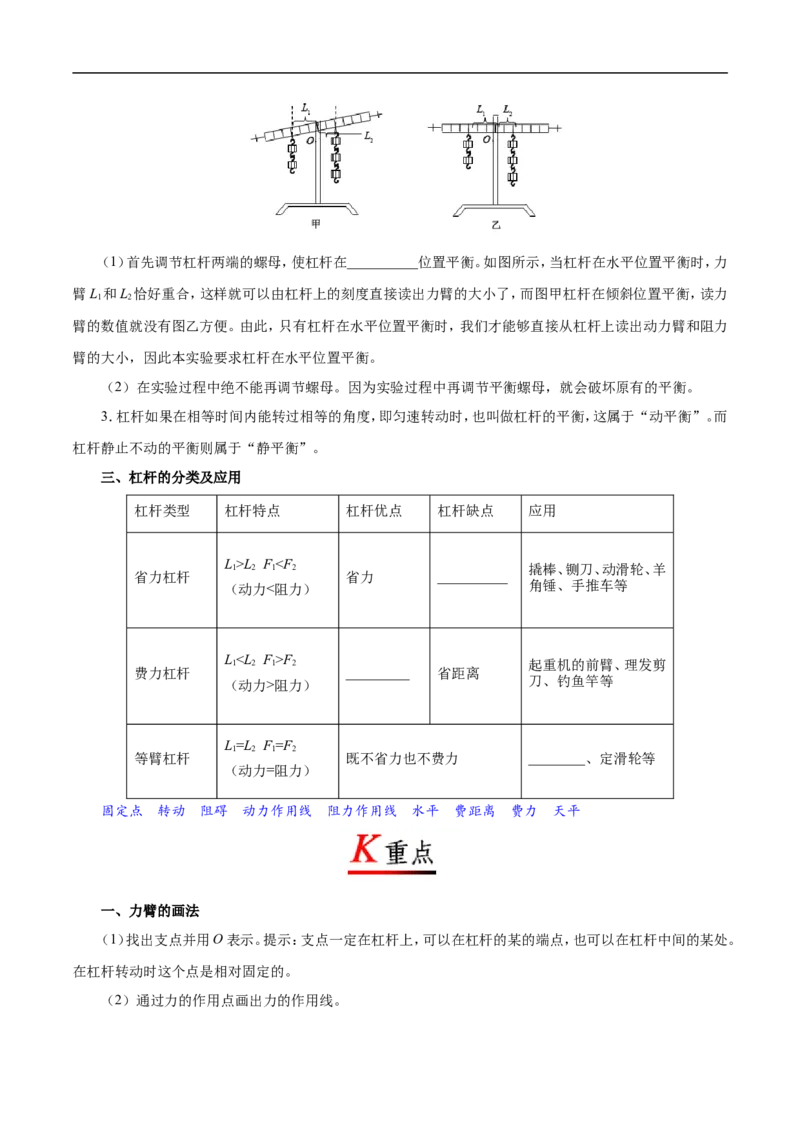
【例题1】如下图是液压汽车起重机的示意图。请你分别画出作用在吊臂上的动力F 的力臂L 和阻力F
1 1 2
的力臂L 。
2
参考答案:
二、利用杠杆的平衡条件来分析有关问题,一般按照以下步骤:
(1)确定杠杆的支点的位置;(2)分清杠杆受到动力和阻力,明确其大小和方向,并尽可能地作出力的示
意图;(3)确定每个力的力臂;(4)根据杠杆的平衡条件列出关系式并分析求解。学科*网
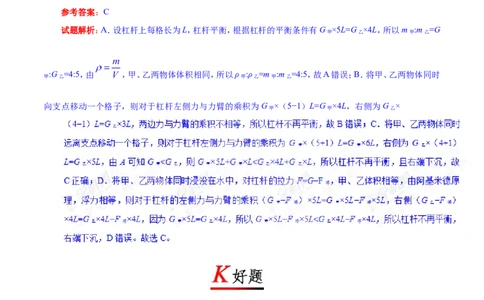
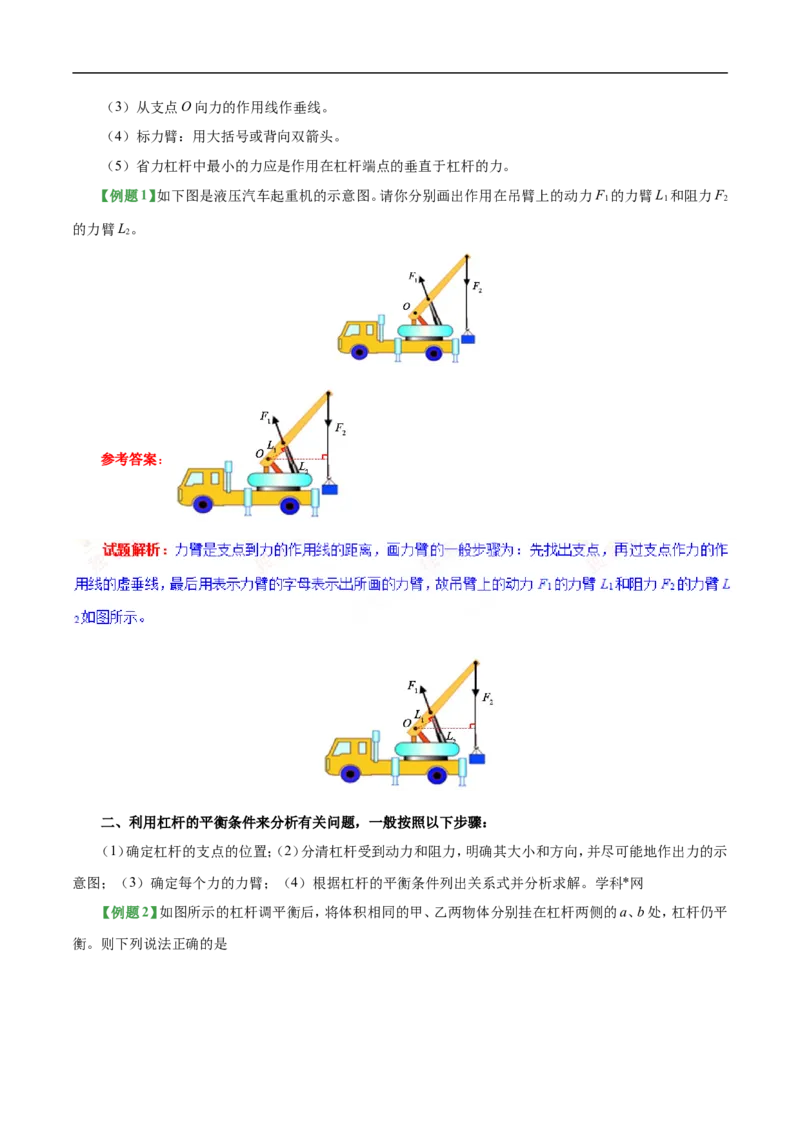
【例题2】如图所示的杠杆调平衡后,将体积相同的甲、乙两物体分别挂在杠杆两侧的a、b处,杠杆仍平
衡。则下列说法正确的是A.甲、乙物体的密度之比为5:4
B.将甲、乙两物体同时向支点移动一个格子,杠杆仍然平衡
C.将甲、乙两物体同时远离支点移动一个格子,杠杆右端将下沉
D.将甲、乙两物体同时浸没在水中,杠杆左端将下沉
参考答案:C
试题解析:A.设杠杆上每格长为L,杠杆平衡,根据杠杆的平衡条件有G ×5L=G ×4L,所以m :m =G
甲 乙 甲 乙
:G =4:5,由 ,甲、乙两物体体积相同,所以ρ :ρ =m :m =4:5,故A错误;B.将甲、乙两物体同时
甲 乙 甲 乙 甲 乙
向支点移动一个格子,则对于杠杆左侧力与力臂的乘积为G ×(5−1)L=G ×4L,右侧为G ×
甲 甲 乙
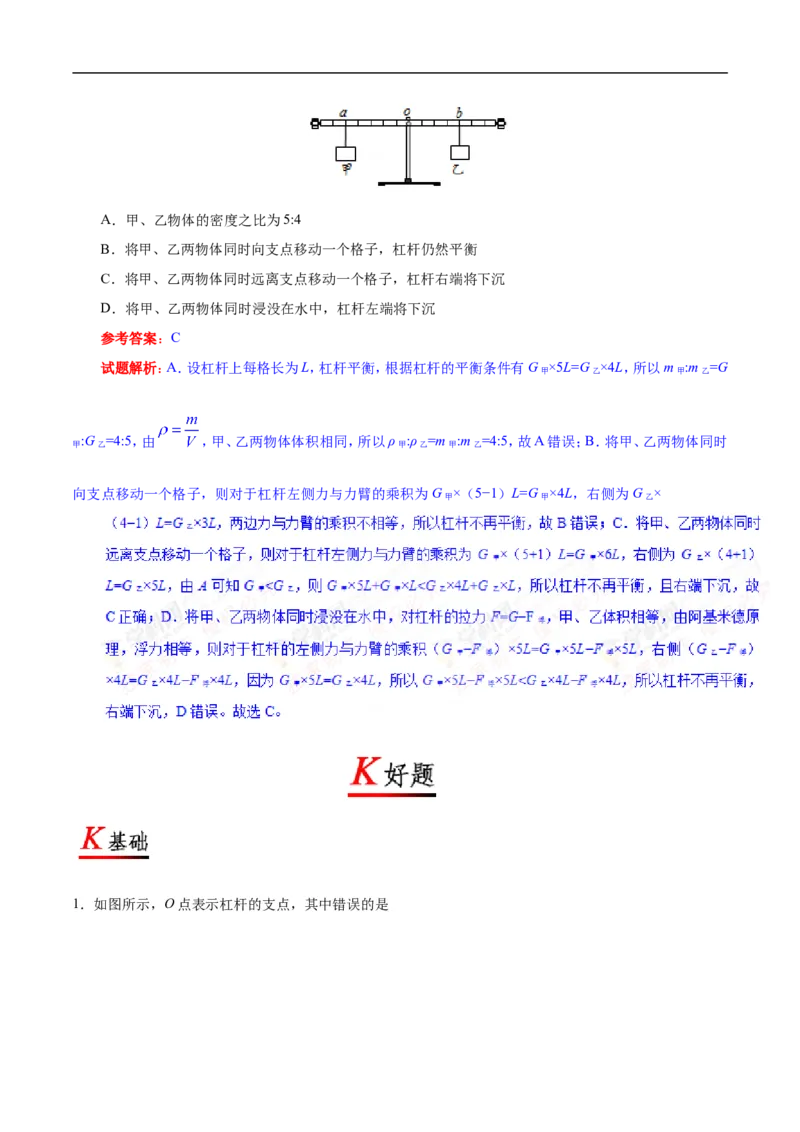
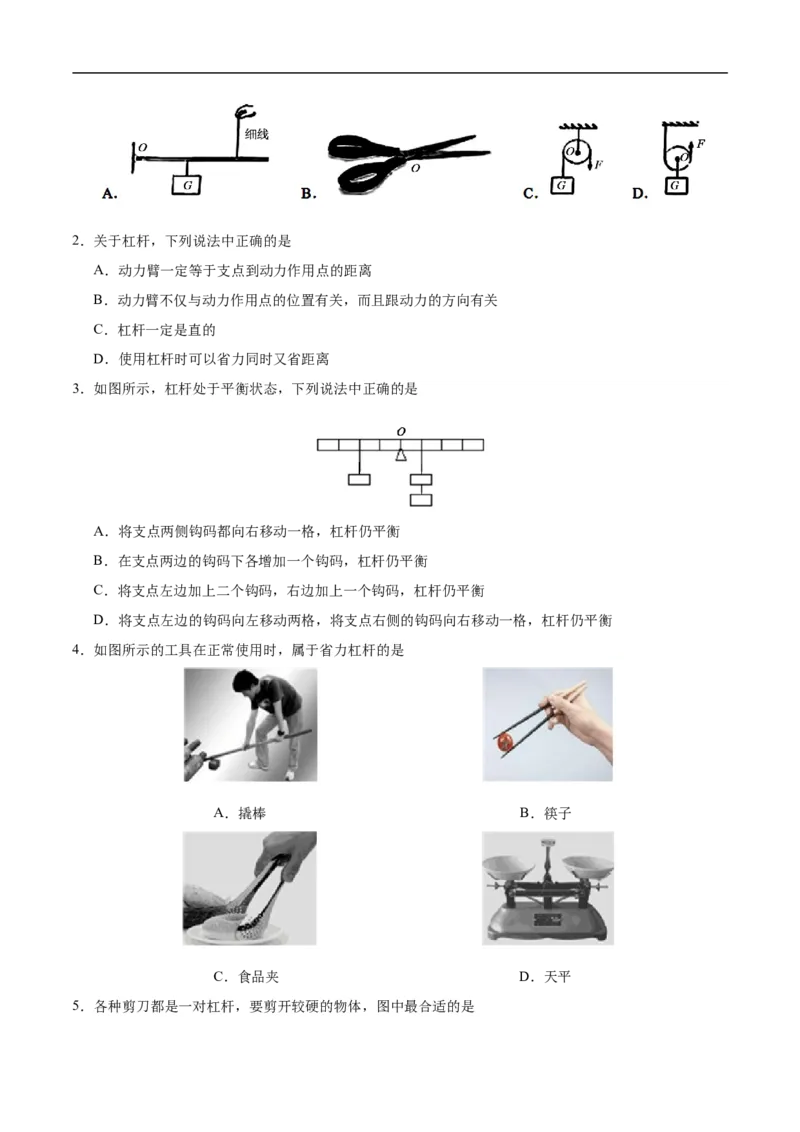
1.如图所示,O点表示杠杆的支点,其中错误的是2.关于杠杆,下列说法中正确的是
A.动力臂一定等于支点到动力作用点的距离
B.动力臂不仅与动力作用点的位置有关,而且跟动力的方向有关
C.杠杆一定是直的
D.使用杠杆时可以省力同时又省距离
3.如图所示,杠杆处于平衡状态,下列说法中正确的是
A.将支点两侧钩码都向右移动一格,杠杆仍平衡
B.在支点两边的钩码下各增加一个钩码,杠杆仍平衡
C.将支点左边加上二个钩码,右边加上一个钩码,杠杆仍平衡
D.将支点左边的钩码向左移动两格,将支点右侧的钩码向右移动一格,杠杆仍平衡
4.如图所示的工具在正常使用时,属于省力杠杆的是
A.撬棒 B.筷子
C.食品夹 D.天平
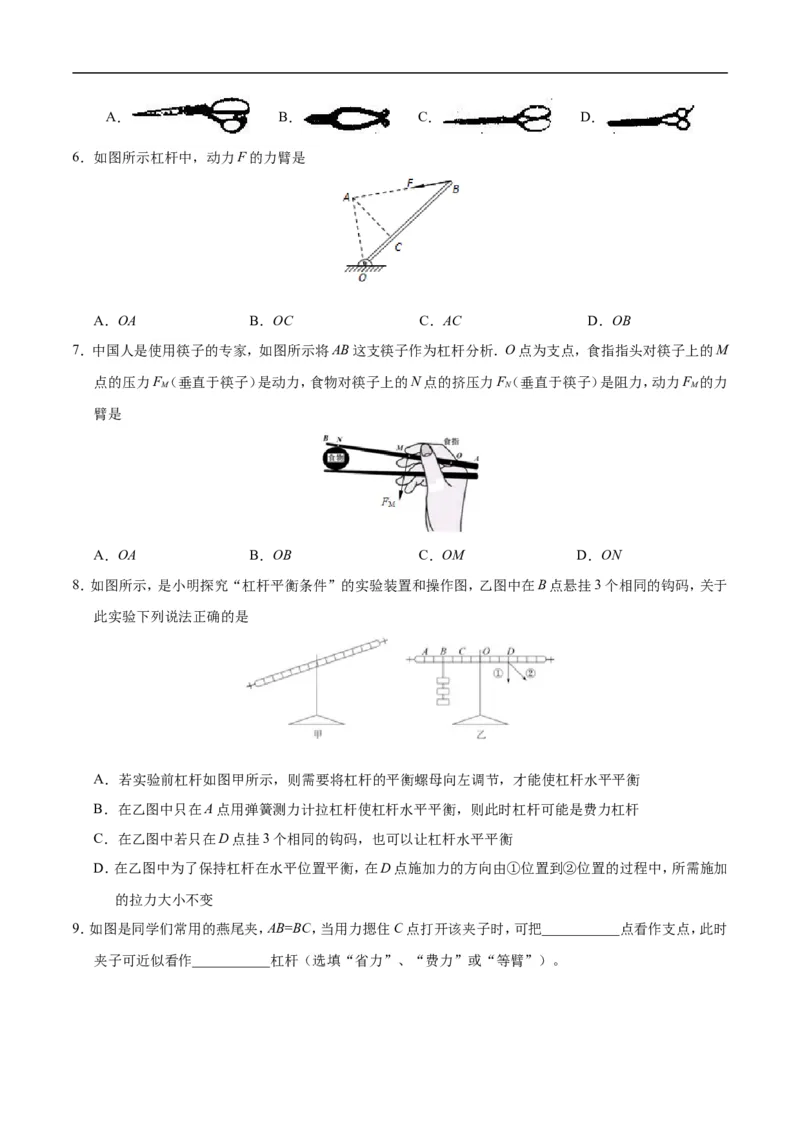
5.各种剪刀都是一对杠杆,要剪开较硬的物体,图中最合适的是A. B. C. D.
6.如图所示杠杆中,动力F的力臂是
A.OA B.OC C.AC D.OB
7.中国人是使用筷子的专家,如图所示将AB这支筷子作为杠杆分析.O点为支点,食指指头对筷子上的M
点的压力F(垂直于筷子)是动力,食物对筷子上的N点的挤压力F(垂直于筷子)是阻力,动力F 的力
M N M
臂是
A.OA B.OB C.OM D.ON
8.如图所示,是小明探究“杠杆平衡条件”的实验装置和操作图,乙图中在B点悬挂3个相同的钩码,关于
此实验下列说法正确的是
A.若实验前杠杆如图甲所示,则需要将杠杆的平衡螺母向左调节,才能使杠杆水平平衡
B.在乙图中只在A点用弹簧测力计拉杠杆使杠杆水平平衡,则此时杠杆可能是费力杠杆
C.在乙图中若只在D点挂3个相同的钩码,也可以让杠杆水平平衡
D.在乙图中为了保持杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,所需施加
的拉力大小不变
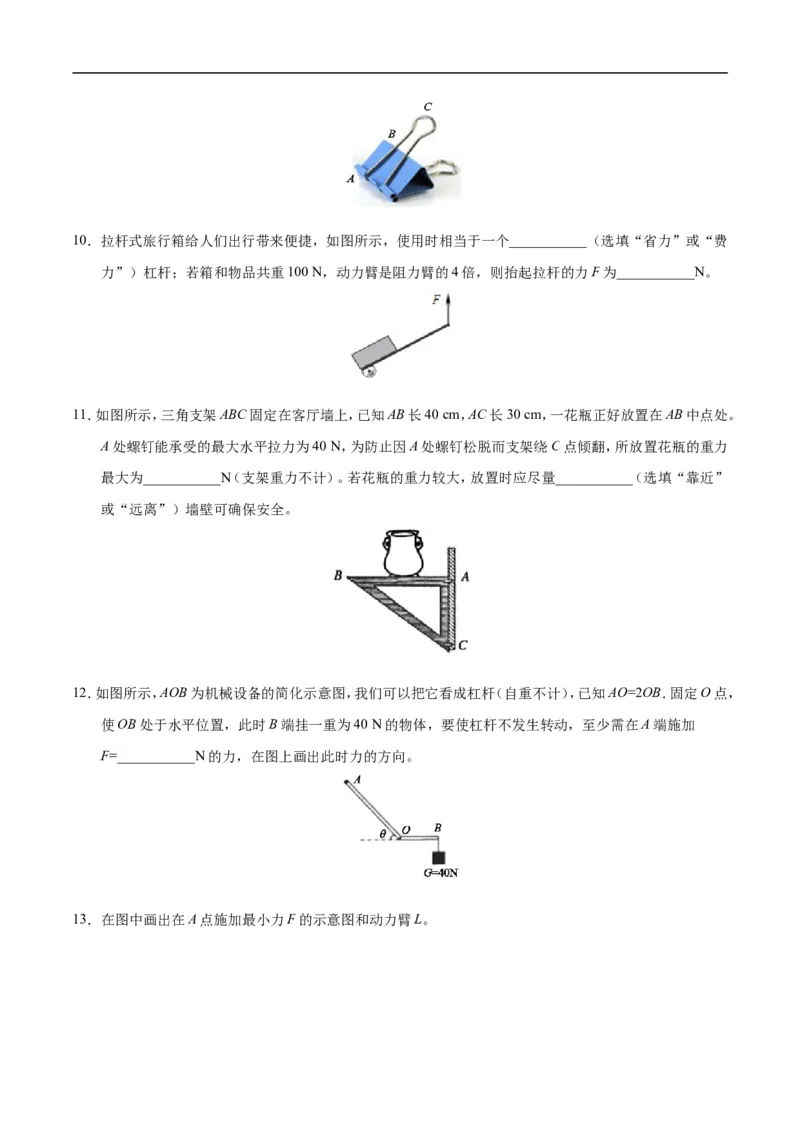
9.如图是同学们常用的燕尾夹,AB=BC,当用力摁住C点打开该夹子时,可把___________点看作支点,此时
夹子可近似看作___________杠杆(选填“省力”、“费力”或“等臂”)。10.拉杆式旅行箱给人们出行带来便捷,如图所示,使用时相当于一个___________(选填“省力”或“费
力”)杠杆;若箱和物品共重100 N,动力臂是阻力臂的4倍,则抬起拉杆的力F为___________N。
11.如图所示,三角支架ABC固定在客厅墙上,已知AB长40 cm,AC长30 cm,一花瓶正好放置在AB中点处。
A处螺钉能承受的最大水平拉力为40 N,为防止因A处螺钉松脱而支架绕C点倾翻,所放置花瓶的重力
最大为___________N(支架重力不计)。若花瓶的重力较大,放置时应尽量___________(选填“靠近”
或“远离”)墙壁可确保安全。
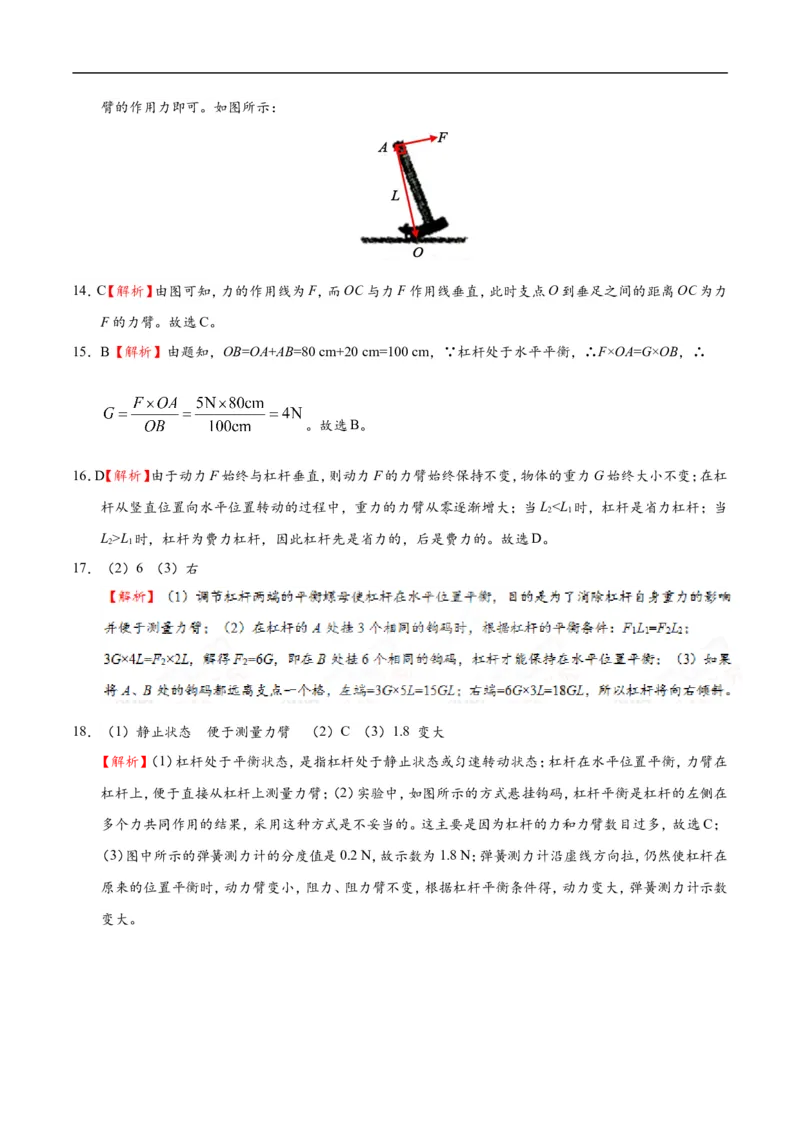
12.如图所示,AOB为机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO=2OB.固定O点,
使OB处于水平位置,此时B端挂一重为40 N的物体,要使杠杆不发生转动,至少需在A端施加
F=___________N的力,在图上画出此时力的方向。
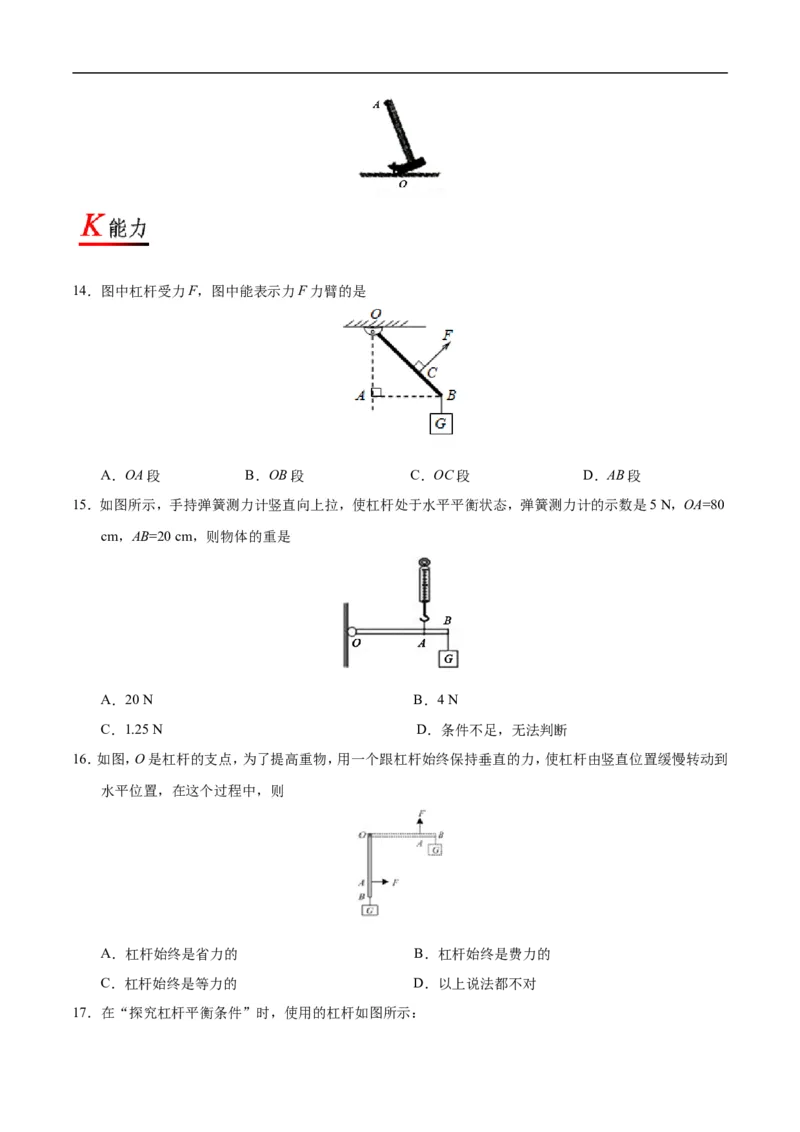
13.在图中画出在A点施加最小力F的示意图和动力臂L。14.图中杠杆受力F,图中能表示力F力臂的是
A.OA段 B.OB段 C.OC段 D.AB段
15.如图所示,手持弹簧测力计竖直向上拉,使杠杆处于水平平衡状态,弹簧测力计的示数是5 N,OA=80
cm,AB=20 cm,则物体的重是
A.20 N B.4 N
C.1.25 N D.条件不足,无法判断
16.如图,O是杠杆的支点,为了提高重物,用一个跟杠杆始终保持垂直的力,使杠杆由竖直位置缓慢转动到
水平位置,在这个过程中,则
A.杠杆始终是省力的 B.杠杆始终是费力的
C.杠杆始终是等力的 D.以上说法都不对
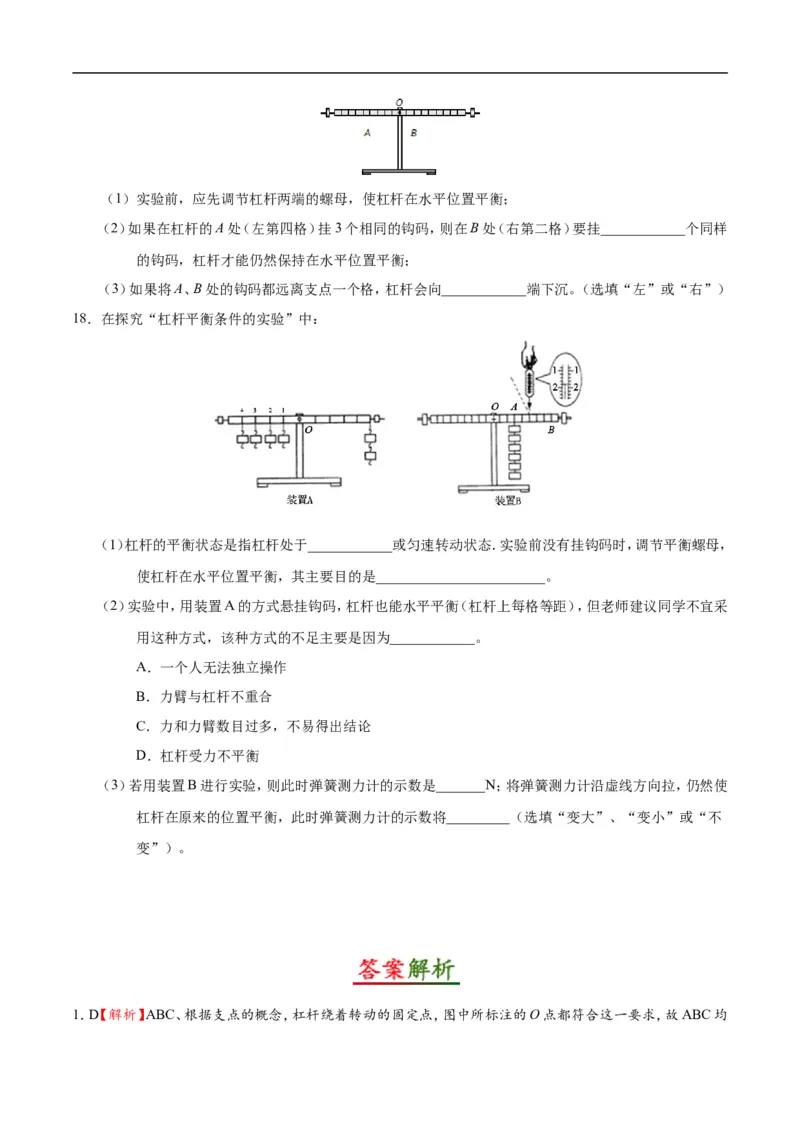
17.在“探究杠杆平衡条件”时,使用的杠杆如图所示:(1)实验前,应先调节杠杆两端的螺母,使杠杆在水平位置平衡;
(2)如果在杠杆的A处(左第四格)挂3个相同的钩码,则在B处(右第二格)要挂____________个同样
的钩码,杠杆才能仍然保持在水平位置平衡;
(3)如果将A、B处的钩码都远离支点一个格,杠杆会向____________端下沉。(选填“左”或“右”)
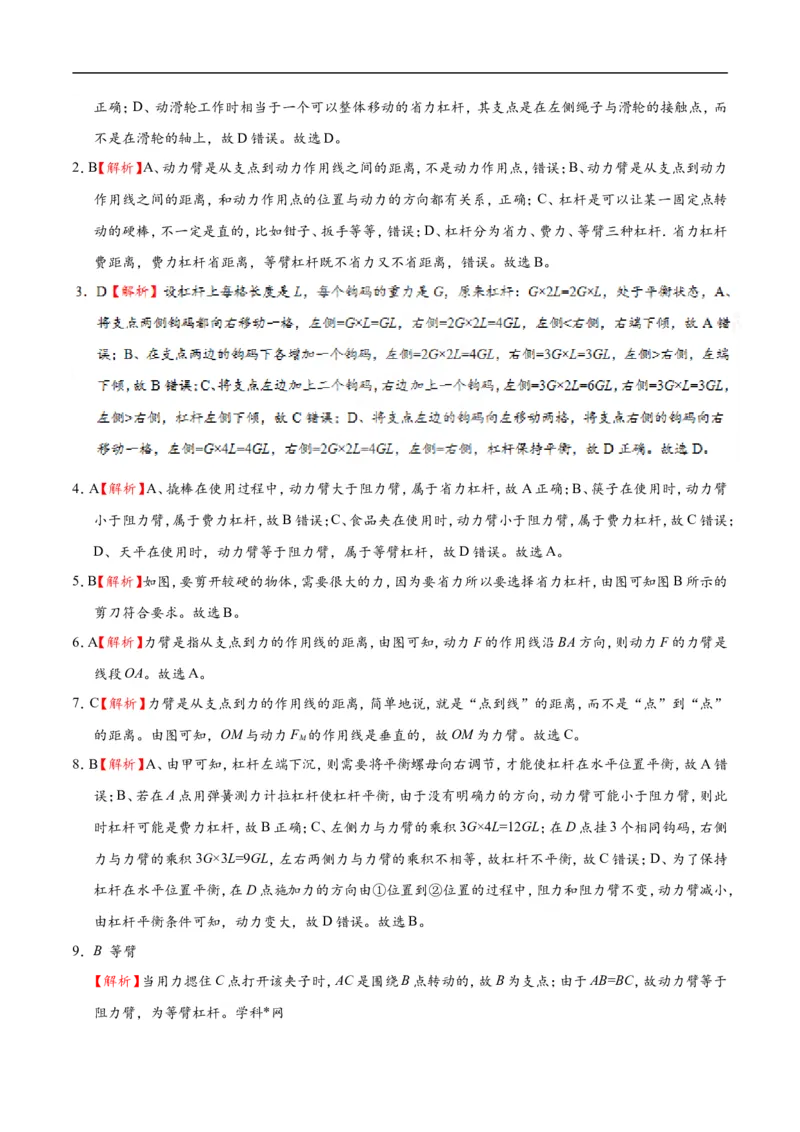
18.在探究“杠杆平衡条件的实验”中:
(1)杠杆的平衡状态是指杠杆处于____________或匀速转动状态.实验前没有挂钩码时,调节平衡螺母,
使杠杆在水平位置平衡,其主要目的是________________________。
(2)实验中,用装置A的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师建议同学不宜采
用这种方式,该种方式的不足主要是因为____________。
A.一个人无法独立操作
B.力臂与杠杆不重合
C.力和力臂数目过多,不易得出结论
D.杠杆受力不平衡
(3)若用装置B进行实验,则此时弹簧测力计的示数是_______N;将弹簧测力计沿虚线方向拉,仍然使
杠杆在原来的位置平衡,此时弹簧测力计的示数将_________(选填“变大”、“变小”或“不
变”)。
1.D【解析】ABC、根据支点的概念,杠杆绕着转动的固定点,图中所标注的O点都符合这一要求,故ABC均正确;D、动滑轮工作时相当于一个可以整体移动的省力杠杆,其支点是在左侧绳子与滑轮的接触点,而
不是在滑轮的轴上,故D错误。故选D。
2.B【解析】A、动力臂是从支点到动力作用线之间的距离,不是动力作用点,错误;B、动力臂是从支点到动力
作用线之间的距离,和动力作用点的位置与动力的方向都有关系,正确;C、杠杆是可以让某一固定点转
动的硬棒,不一定是直的,比如钳子、扳手等等,错误;D、杠杆分为省力、费力、等臂三种杠杆.省力杠杆
费距离,费力杠杆省距离,等臂杠杆既不省力又不省距离,错误。故选B。
4.A【解析】A、撬棒在使用过程中,动力臂大于阻力臂,属于省力杠杆,故A正确;B、筷子在使用时,动力臂
小于阻力臂,属于费力杠杆,故B错误;C、食品夹在使用时,动力臂小于阻力臂,属于费力杠杆,故C错误;
D、天平在使用时,动力臂等于阻力臂,属于等臂杠杆,故D错误。故选A。
5.B【解析】如图,要剪开较硬的物体,需要很大的力,因为要省力所以要选择省力杠杆,由图可知图B所示的
剪刀符合要求。故选B。
6.A【解析】力臂是指从支点到力的作用线的距离,由图可知,动力F的作用线沿BA方向,则动力F的力臂是
线段OA。故选A。
7.C【解析】力臂是从支点到力的作用线的距离,简单地说,就是“点到线”的距离,而不是“点”到“点”
的距离。由图可知,OM与动力F 的作用线是垂直的,故OM为力臂。故选C。
M
8.B【解析】A、由甲可知,杠杆左端下沉,则需要将平衡螺母向右调节,才能使杠杆在水平位置平衡,故A错
误;B、若在A点用弹簧测力计拉杠杆使杠杆平衡,由于没有明确力的方向,动力臂可能小于阻力臂,则此
时杠杆可能是费力杠杆,故B正确;C、左侧力与力臂的乘积3G×4L=12GL;在D点挂3个相同钩码,右侧
力与力臂的乘积3G×3L=9GL,左右两侧力与力臂的乘积不相等,故杠杆不平衡,故C错误;D、为了保持
杠杆在水平位置平衡,在D点施加力的方向由①位置到②位置的过程中,阻力和阻力臂不变,动力臂减小,
由杠杆平衡条件可知,动力变大,故D错误。故选B。
9.B 等臂
【解析】当用力摁住C点打开该夹子时,AC是围绕B点转动的,故B为支点;由于AB=BC,故动力臂等于
阻力臂,为等臂杠杆。学科*网10.省力 25
【解析】抬起拉杆的力F为动力,物品的重力为阻力,支点在下面,故动力臂大于阻力臂,所以是省力杠
杆;由杠杆的平衡条件:F ×L =F ×L ,可求得 。
动 动 阻 阻
11.60 靠近
12.20
【解析】由题意可知,图中O为支点,A为动力作用点,OA就是最大的动力臂,过A点作OA的垂线,方向
向下,如图所示,作出动力F。根据杠杆平衡条件F·OA=G·OB可得: 。力的方向
如下图所示:
13.
【解析】力臂越长越省力,最长的力臂即支点O与作用点A的连线,然后根据力臂的画法作出垂直于力臂的作用力即可。如图所示:
14.C【解析】由图可知,力的作用线为F,而OC与力F作用线垂直,此时支点O到垂足之间的距离OC为力
F的力臂。故选C。
15.B【解析】由题知,OB=OA+AB=80 cm+20 cm=100 cm,∵杠杆处于水平平衡,∴F×OA=G×OB,∴
。故选B。
16.D【解析】由于动力F始终与杠杆垂直,则动力F的力臂始终保持不变,物体的重力G始终大小不变;在杠
杆从竖直位置向水平位置转动的过程中,重力的力臂从零逐渐增大;当LL 时,杠杆为费力杠杆,因此杠杆先是省力的,后是费力的。故选D。
2 1
17.(2)6 (3)右
18.(1)静止状态 便于测量力臂 (2)C (3)1.8 变大
【解析】(1)杠杆处于平衡状态,是指杠杆处于静止状态或匀速转动状态;杠杆在水平位置平衡,力臂在
杠杆上,便于直接从杠杆上测量力臂;(2)实验中,如图所示的方式悬挂钩码,杠杆平衡是杠杆的左侧在
多个力共同作用的结果,采用这种方式是不妥当的。这主要是因为杠杆的力和力臂数目过多,故选C;
(3)图中所示的弹簧测力计的分度值是0.2 N,故示数为1.8 N;弹簧测力计沿虚线方向拉,仍然使杠杆在
原来的位置平衡时,动力臂变小,阻力、阻力臂不变,根据杠杆平衡条件得,动力变大,弹簧测力计示数
变大。

