当前时间: 2026-04-29 07:05:34
更新时间: 2026-04-29
分类:软件教程
评论(0)
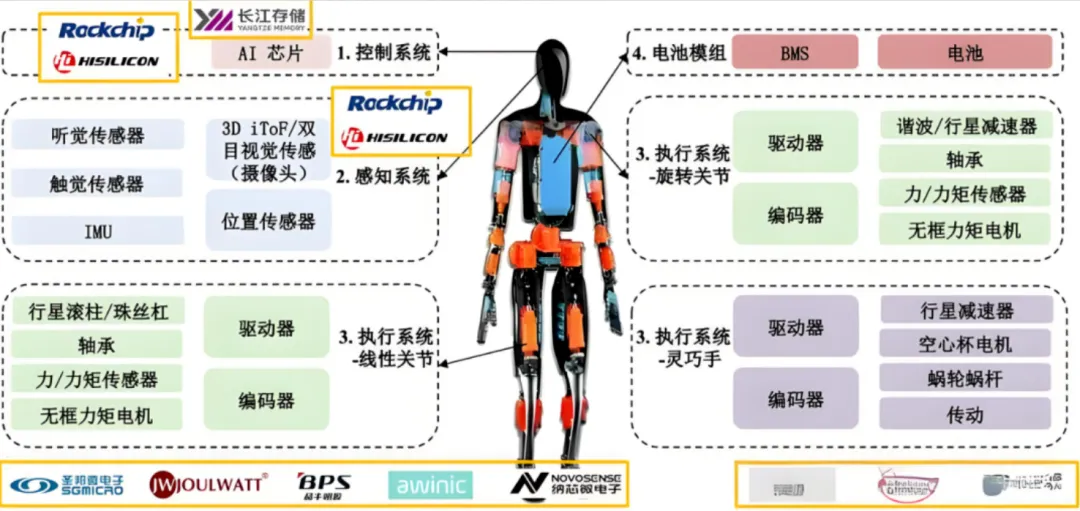
机器人软件架构介绍
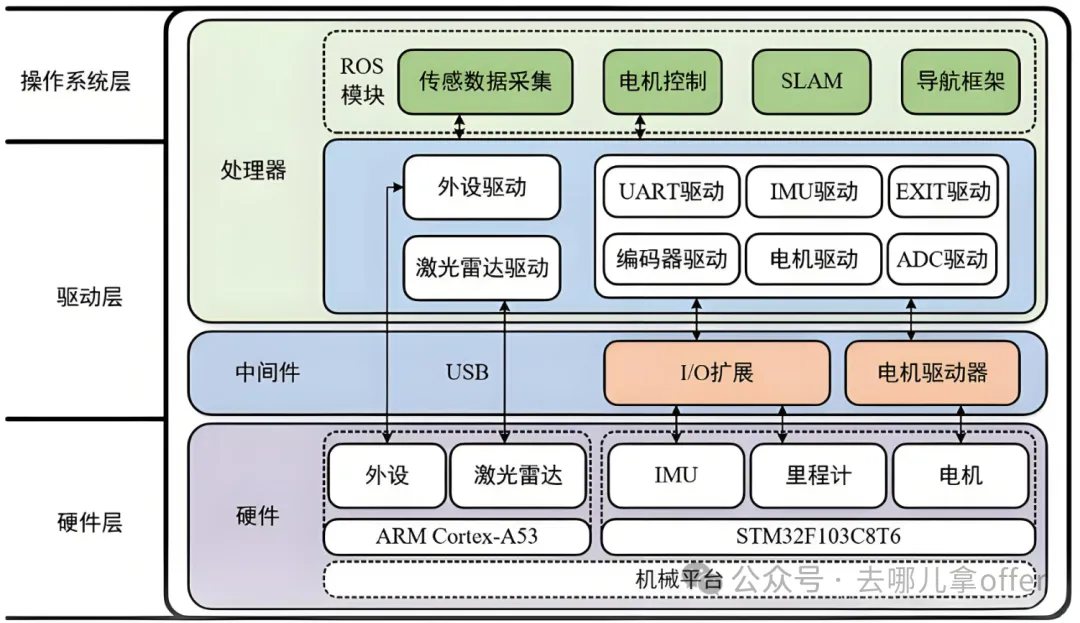
机器人软件架构是决定机器人功能上限、控制精度、智能化水平与安全可靠性的核心,是机器人系统的神经中枢与运行骨架,被称为机器人的“数字灵魂”。
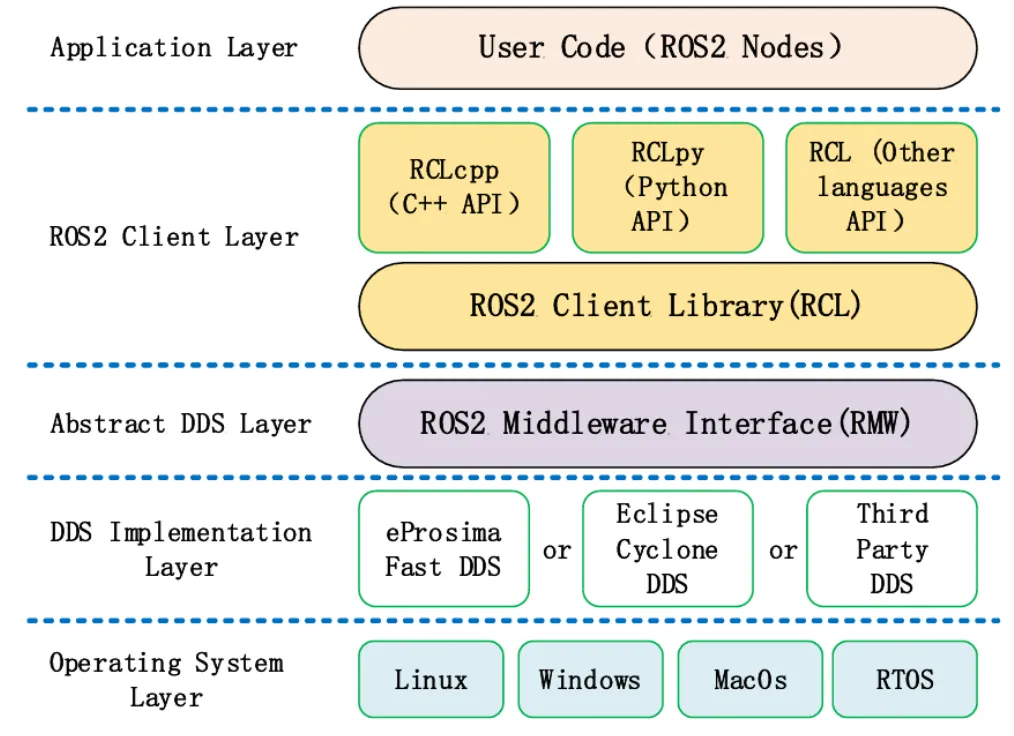
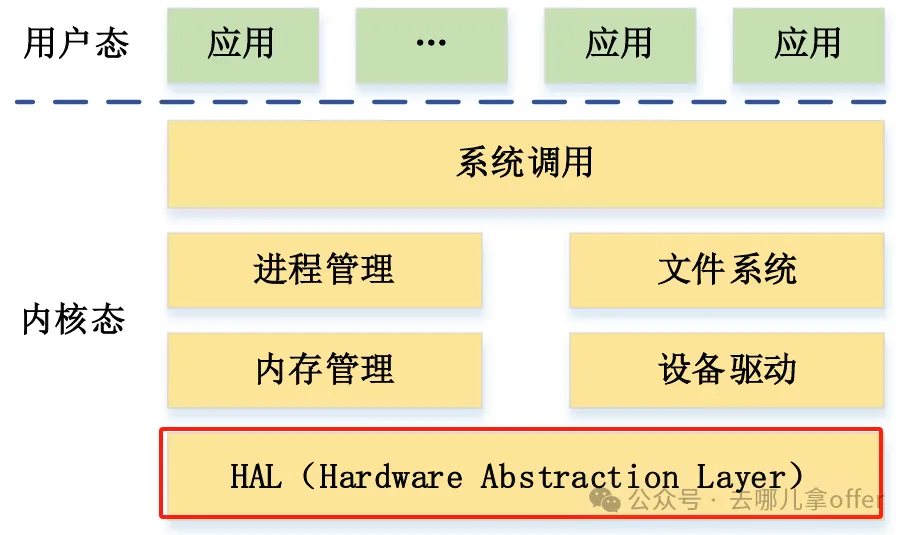
行业主流采用两大技术路线:一是基于ROS/ROS2的分布式模块化软件架构,二是自研全栈硬实时一体化架构。两类路线均按功能属性与实时性要求划分为标准5层架构,从底层到顶层依次为:硬件抽象层HAL→驱动执行层→实时控制层→决策规划层→应用层,实现了层级间接口标准化、算力合理分配、功能解耦与高效协同。
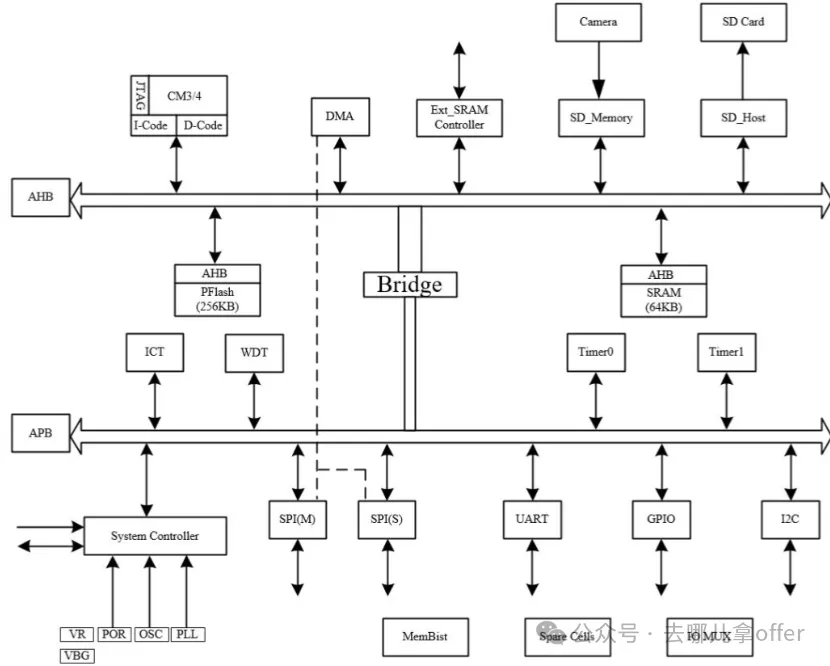
硬件抽象层(HAL)- 底层适配层
统一设备驱动框架:标准化的驱动注册、加载、卸载与热插拔机制,兼容各类外设
驱动执行层 – 超高速硬实时层级
 夜雨聆风
夜雨聆风