 夜雨聆风
夜雨聆风





【全球前沿】NPJ发文:通过AI驱动的可穿戴测距工具,分析非正规定居点的内部结构
里约热内卢约23%的人口,约150万人,居住在贫民窟,这是一种巴西的非正式聚居形式。这些社区通常缺乏基本基础设施,且因复杂且不规则的城市形态而受到环境和公共卫生挑战的严重影响。鉴于其规模和重要性,全面理解这些社区的空间配置至关重要。然而,传统的自上而下地图方法未能充分捕捉这些环境中的垂直和空间复杂性。本研究提出了一种新框架,结合语义分割程序,利用可穿戴的光线检测与测距(LiDAR)数据集和人工智能(AI)驱动的方法,实现贫民窟的三维(3D)场景理解。利用在维迪加尔贫民窟收集的高分辨率点云训练语义分割模型,准确分类七个与非正规定居点三维形态相关的关键对象类别,包括地面、植被、建筑物、铁丝、岩石、电线杆和可移动物体。我们的结果凸显了点级特征工程和多尺度邻里分析在密集且不规则非正规环境中对物体进行精确分割的有效性。该方法提供了一种可扩展的方式来捕捉非正规定居点的内部空间复杂性,支持数据驱动的规划、风险评估和在原本难以到达区域实现公平基础设施建设。
引言
主要科学问题:全球范围内,非正规住区(Informal Settlements)作为城市化的重要组成部分,承载了大量低收入群体的居住需求。然而,这些区域往往缺乏基本的基础设施,且空间布局复杂,给城市规划、资源分配和社会公平带来了巨大挑战。传统上,对非正规住区的监测主要依赖于卫星或航空影像,这些方法虽然能够高效获取住区的外部边界,却难以捕捉其内部的空间复杂性和三维形态。因此,如何有效揭示非正规住区的内部结构,成为城市地理学和城市规划领域亟待解决的科学问题。
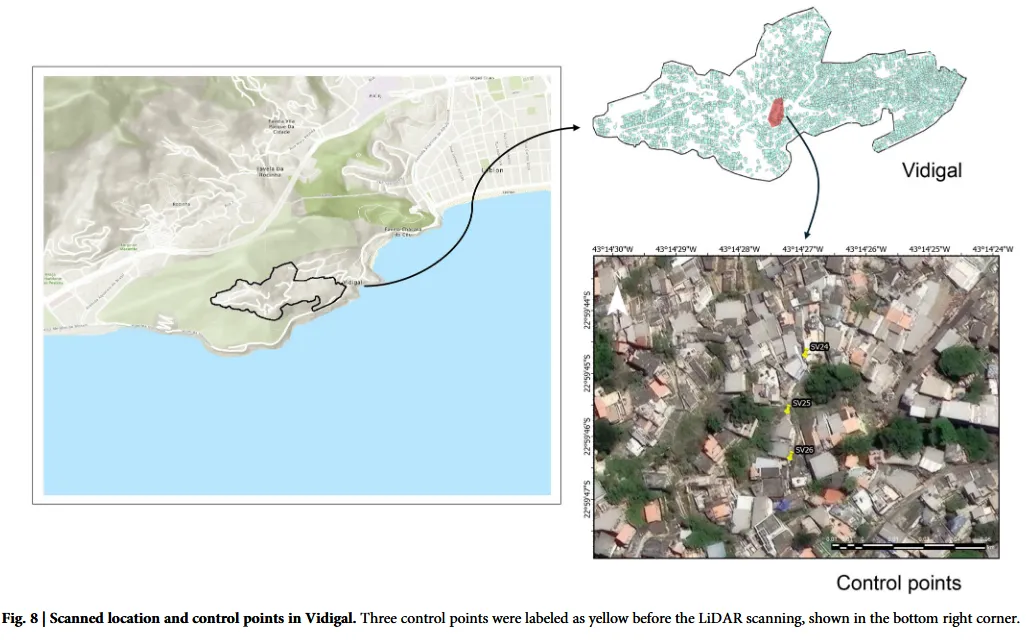
研究目的:本研究旨在通过开发一种基于人工智能驱动的三维语义分割方法,利用可穿戴式激光雷达(Light Detection and Ranging, LiDAR)数据,揭示巴西里约热内卢非正规住区(特别是Vidigal贫民窟)的内部空间结构。研究不仅关注于技术方法的创新,更希望通过详细的三维模型,为数据驱动的规划、风险评估和公平的基础设施发展提供科学依据。
方法
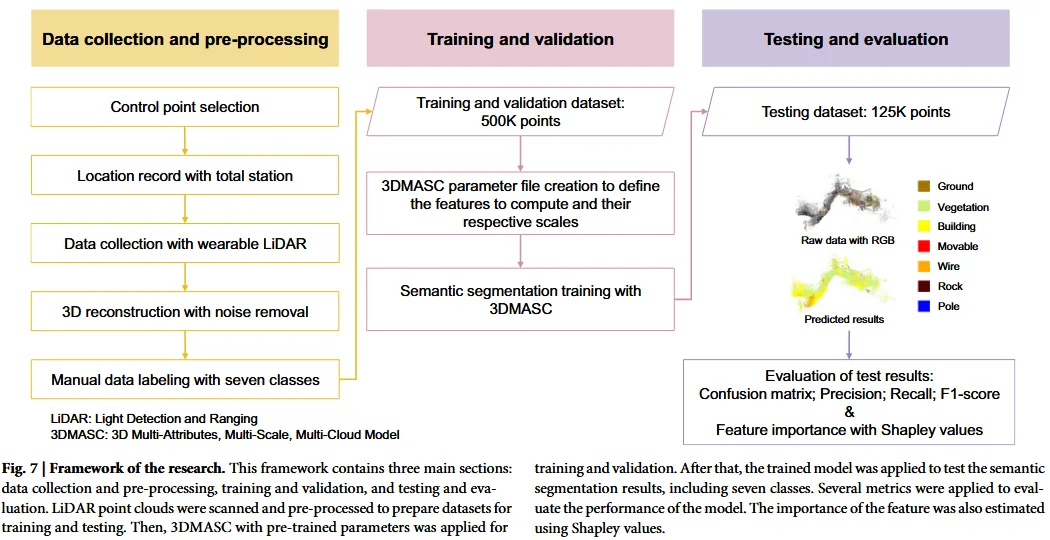
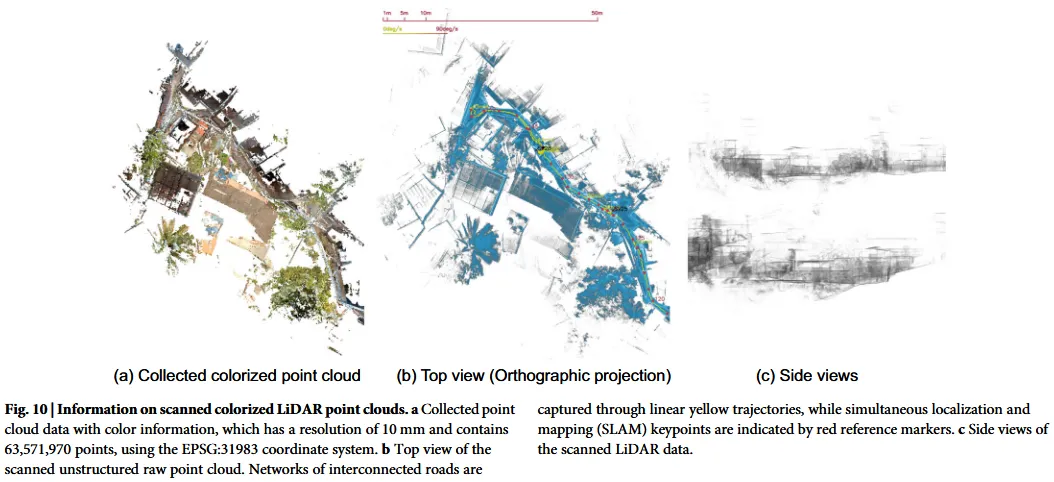
数据收集与处理:研究选择了里约热内卢的Vidigal贫民窟作为案例研究区域,利用可穿戴式激光雷达设备收集高分辨率的三维点云数据。数据收集过程中,研究团队与当地居民代表密切合作,确保透明度和社区参与。数据预处理包括去噪、三维重建和地理配准,以确保数据的准确性和可用性。
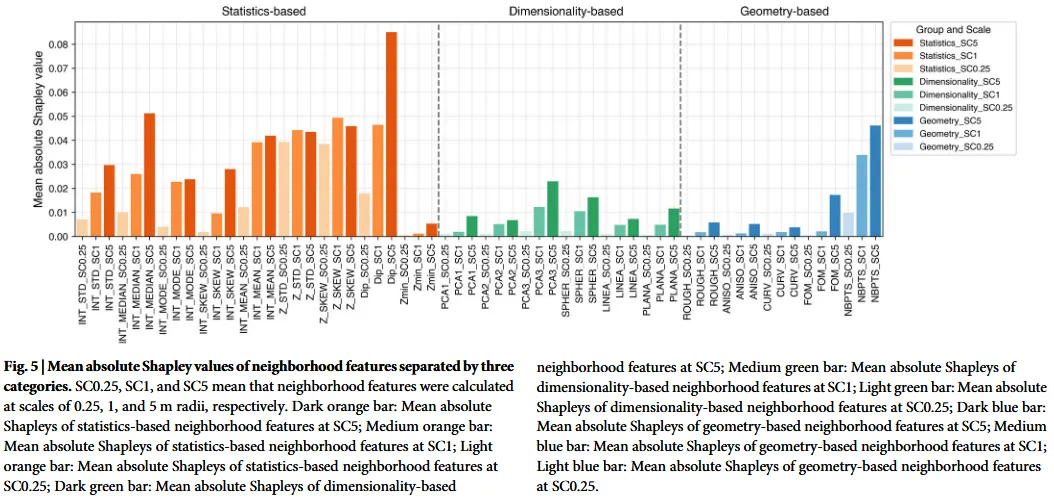
语义分割模型构建:研究采用了一种基于随机森林的三维多属性多尺度多云模型(Three-Dimensional Multi-Attributes, Multi-Scale, Multi-Cloud Model, 3DMASC)进行语义分割。该模型结合了点特征和邻域特征,通过不同尺度的球形邻域计算统计量、维度特征和几何特征,以捕捉点云数据的复杂上下文信息。具体步骤包括:
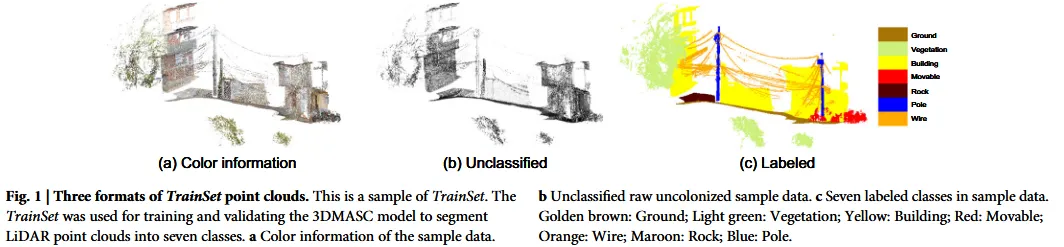
数据标注:从收集的点云数据中选取一部分进行手动标注,定义七个关键物体类别:地面、植被、建筑物、可移动物体、电线、岩石和杆状物。
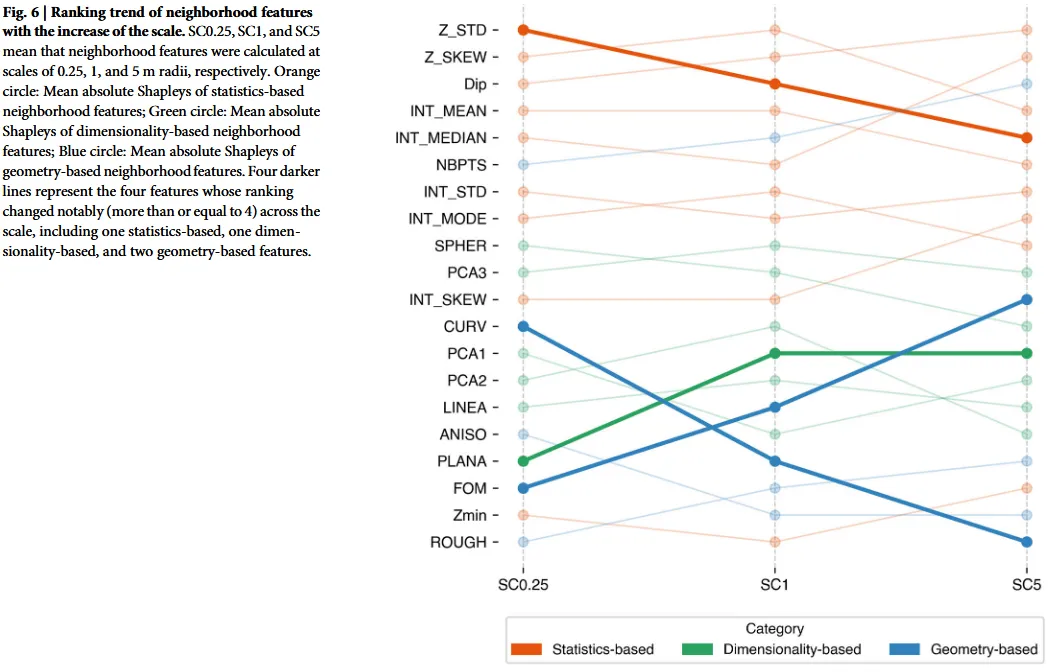
特征提取:计算点特征(如颜色、强度)和邻域特征(如统计量、维度特征和几何特征),并在三个不同的空间尺度(0.25米、1米和5米半径)上进行计算。
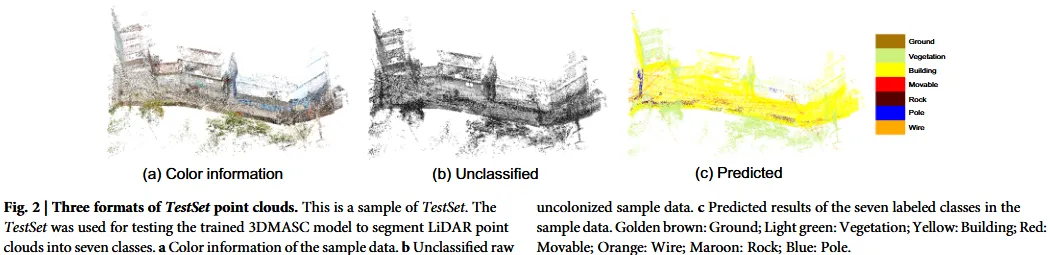
模型训练与验证:使用标注的数据集训练3DMASC模型,并通过混淆矩阵、精确率、召回率和F1分数等指标评估模型性能。
技术细节:
设备选择:使用可穿戴式同步定位与地图构建(Simultaneous Localization and Mapping, SLAM)激光雷达设备,该设备具有高分辨率、快速数据采集和在复杂城市环境中高效工作的能力。
软件工具:利用CloudCompare软件进行数据标注和模型训练,该软件提供了开放源代码的插件,便于实现3DMASC模型。
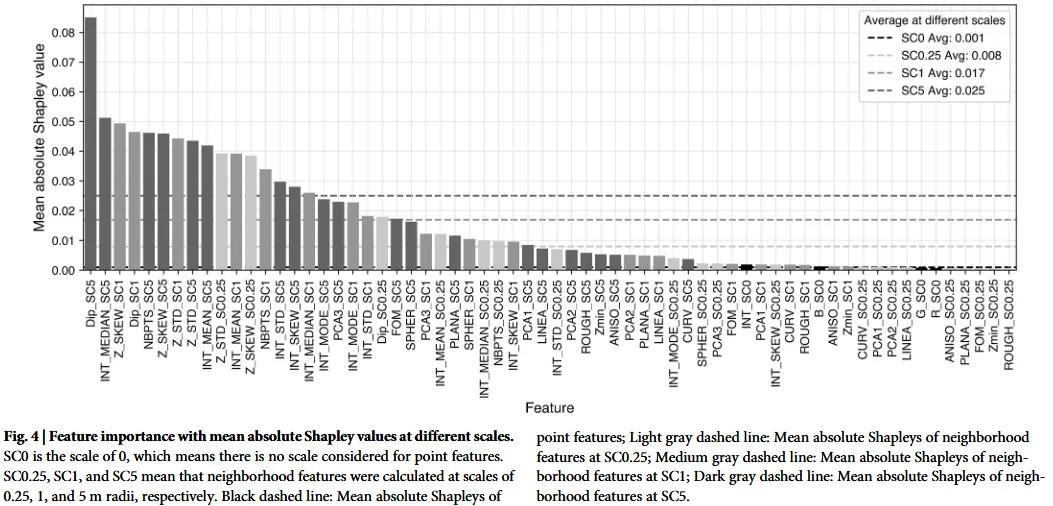
特征重要性分析:通过Shapley值评估各特征对预测结果的贡献,以解释模型决策过程。
结论
模型性能:3DMASC模型在测试集上表现出色,总体准确率达到94.55%,各类别的精确率、召回率和F1分数均较高,证明了该方法在非正规住区语义分割中的有效性。
特征重要性:邻域特征比点特征更具信息量,特别是5米半径尺度上的特征对模型决策贡献最大。这表明在复杂环境中,上下文信息对于物体类别识别至关重要。
空间复杂性揭示:通过详细的三维模型,研究揭示了Vidigal贫民窟内部的空间复杂性,包括道路条件、建筑密度、植被分布和基础设施状况等,为城市规划提供了宝贵的数据支持。
本研究通过结合高分辨率激光雷达数据和先进的机器学习算法,成功实现了非正规住区内部结构的三维语义分割。通过详细的数据标注、特征提取和模型训练,研究不仅验证了3DMASC模型的有效性,还深入分析了各类特征对预测结果的贡献。最终,通过三维模型的构建,研究直观展示了非正规住区的空间复杂性,为城市规划提供了科学依据。

讨论
结果解释:本研究的结果表明,通过结合高分辨率激光雷达数据和机器学习算法,可以有效揭示非正规住区的内部空间结构。模型的高性能得益于对上下文信息的充分利用,特别是在复杂和密集的环境中,多尺度邻域特征对于物体类别识别至关重要。
研究贡献:提出了一种基于可穿戴式激光雷达和机器学习的非正规住区语义分割方法,填补了传统方法在捕捉内部空间复杂性方面的不足。通过详细的三维模型,为城市规划、风险评估和公平的基础设施发展提供了数据支持。强调了社区参与和信任建立在数据收集过程中的重要性,为未来研究提供了可借鉴的模式。对于城市规划者和政策制定者而言,本研究的结果提供了关于非正规住区内部结构的详细信息,有助于制定更加精准和有效的规划策略。同时,通过揭示空间不平等现象,研究也为促进社会公平和可持续发展提供了科学依据。
局限性与未来展望:尽管本研究在方法创新和数据支持方面取得了显著进展,但仍存在一些局限性。例如,数据集和样本量有限,未来研究应扩大样本范围以验证方法的普适性。此外,研究还可以进一步探索旋转不变性特征的引入和数据增强策略,以提高模型的鲁棒性。最终,通过结合系统消融实验,可以进一步细化对特定特征组在复杂住区环境中重要性的理解。

本公众号分享国际规划前沿解读,个人观点仅供参考,欢迎指正,文章版权归原作者所有。

原文请点击“阅读原文”查看