文档内容
2025年1月浙江省普通高校招生选考科目考试
通用技术
一、选择题(本大题共12小题,每小题2分,共24分。每小题列出的四个备选项中只有一个是符合
题目要求的,不选、多选、错选均不得分)
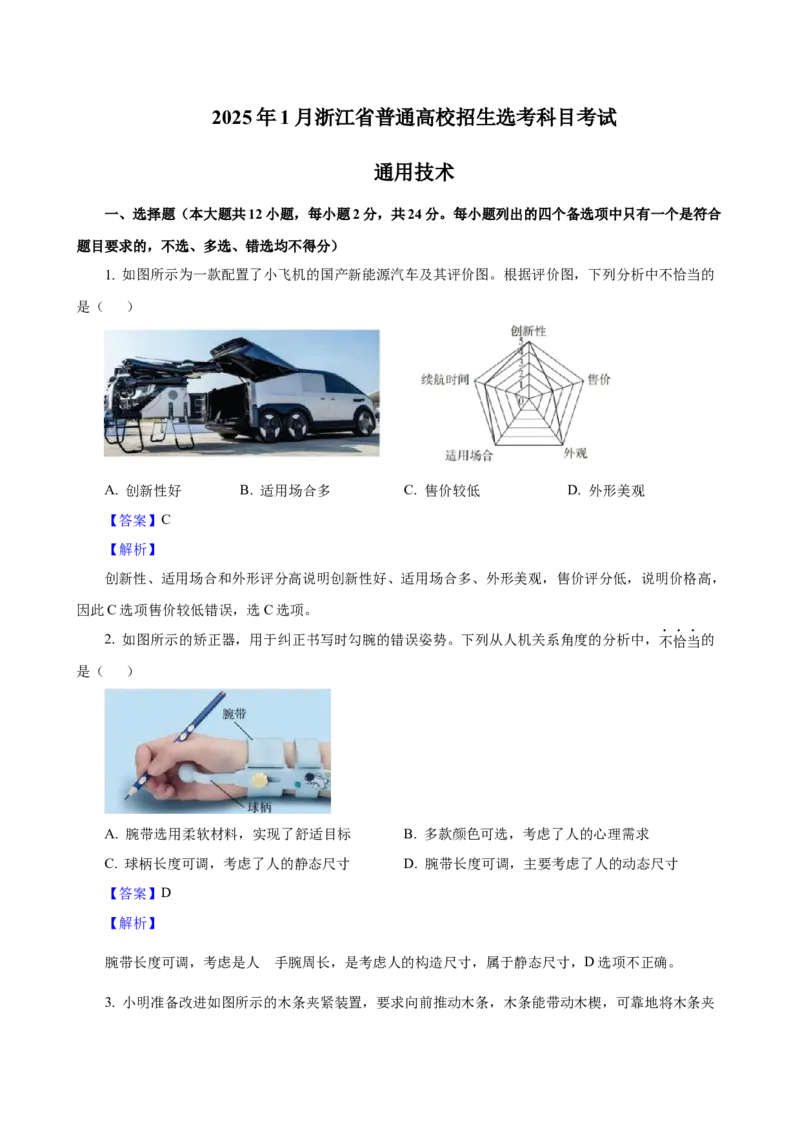
1. 如图所示为一款配置了小飞机的国产新能源汽车及其评价图。根据评价图,下列分析中不恰当的
是( )
A. 创新性好 B. 适用场合多 C. 售价较低 D. 外形美观
【答案】C
【解析】
创新性、适用场合和外形评分高说明创新性好、适用场合多、外形美观,售价评分低,说明价格高,
因此C选项售价较低错误,选C选项。
2. 如图所示的矫正器,用于纠正书写时勾腕的错误姿势。下列从人机关系角度的分析中,不恰当的
是( )
A. 腕带选用柔软材料,实现了舒适目标 B. 多款颜色可选,考虑了人的心理需求
C. 球柄长度可调,考虑了人的静态尺寸 D. 腕带长度可调,主要考虑了人的动态尺寸
【答案】D
【解析】
的
腕带长度可调,考虑是人 手腕周长,是考虑人的构造尺寸,属于静态尺寸,D选项不正确。
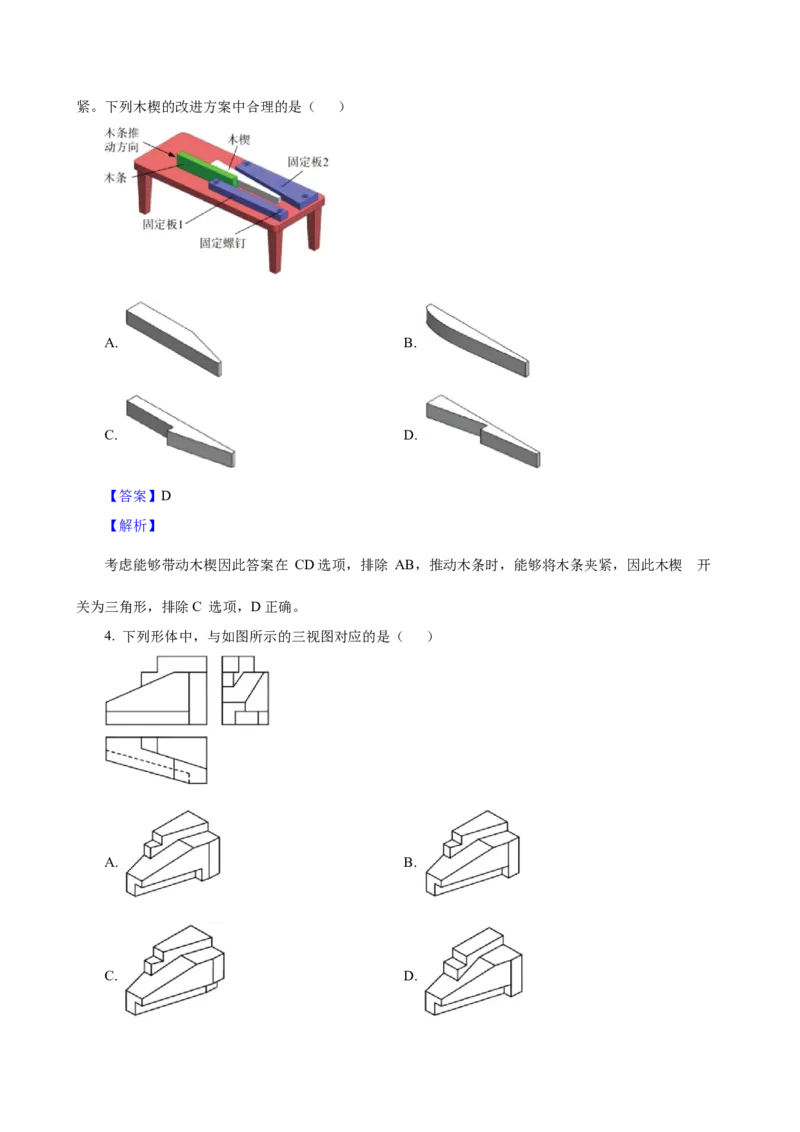
3. 小明准备改进如图所示的木条夹紧装置,要求向前推动木条,木条能带动木楔,可靠地将木条夹紧。下列木楔的改进方案中合理的是( )
A. B.
C. D.
【答案】D
【解析】
的
考虑能够带动木楔因此答案在 CD选项,排除 AB,推动木条时,能够将木条夹紧,因此木楔 开
关为三角形,排除C 选项,D正确。
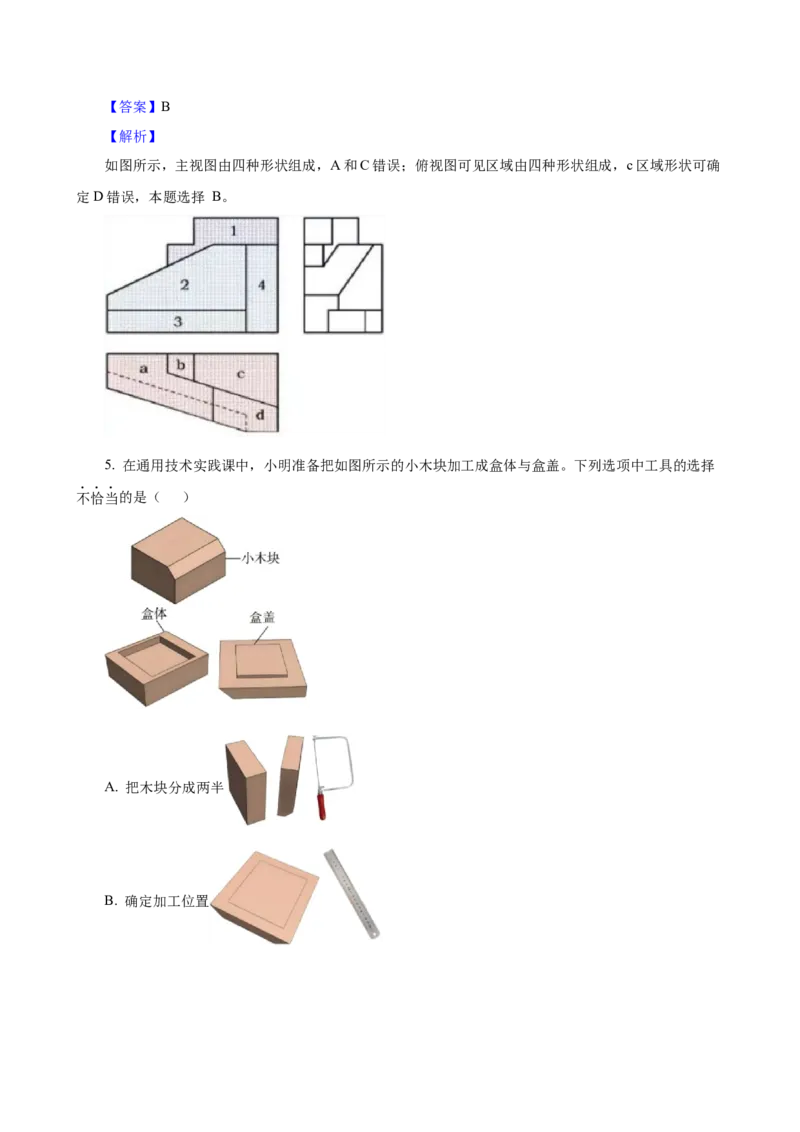
4. 下列形体中,与如图所示的三视图对应的是( )
A. B.
C. D.【答案】B
【解析】
如图所示,主视图由四种形状组成,A和C错误;俯视图可见区域由四种形状组成,c区域形状可确
定D错误,本题选择 B。
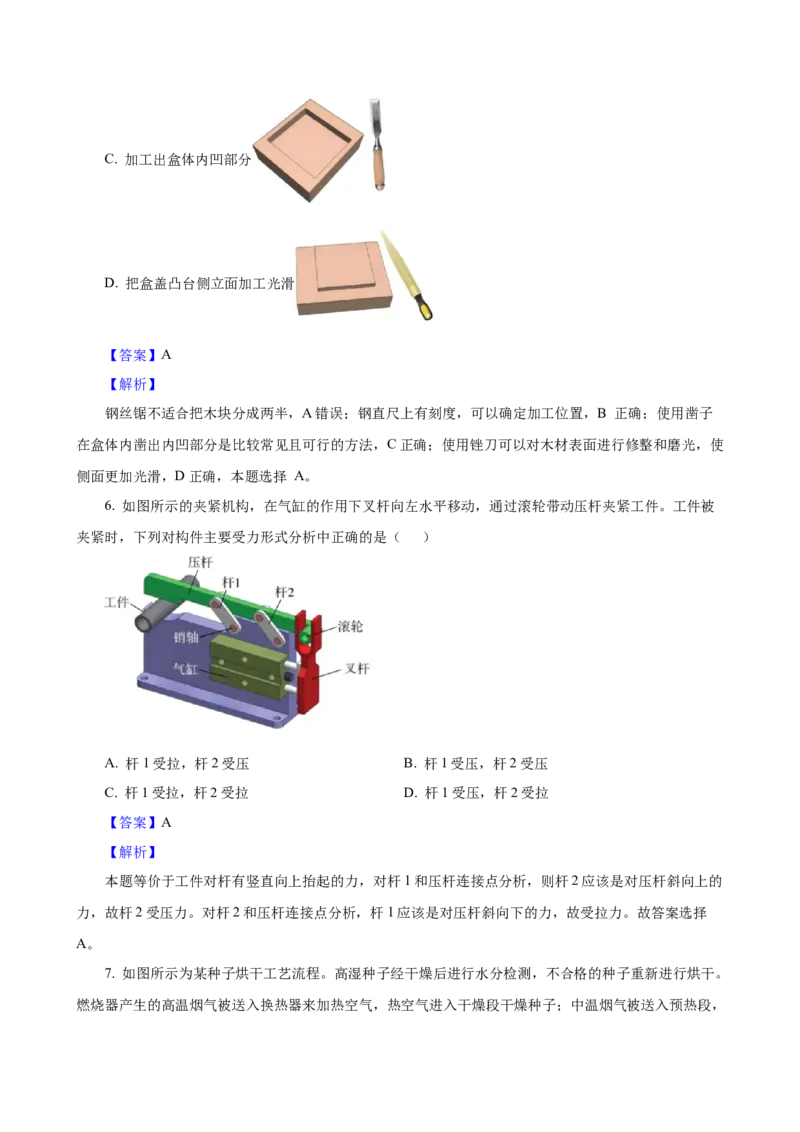
5. 在通用技术实践课中,小明准备把如图所示的小木块加工成盒体与盒盖。下列选项中工具的选择
不恰当的是( )
A. 把木块分成两半
B. 确定加工位置C. 加工出盒体内凹部分
D. 把盒盖凸台侧立面加工光滑
【答案】A
【解析】
钢丝锯不适合把木块分成两半,A错误;钢直尺上有刻度,可以确定加工位置,B 正确;使用凿子
在盒体内凿出内凹部分是比较常见且可行的方法,C正确;使用锉刀可以对木材表面进行修整和磨光,使
侧面更加光滑,D正确,本题选择 A。
6. 如图所示的夹紧机构,在气缸的作用下叉杆向左水平移动,通过滚轮带动压杆夹紧工件。工件被
夹紧时,下列对构件主要受力形式分析中正确的是( )
A. 杆1受拉,杆2受压 B. 杆1受压,杆2受压
C. 杆1受拉,杆2受拉 D. 杆1受压,杆2受拉
【答案】A
【解析】
本题等价于工件对杆有竖直向上抬起的力,对杆1和压杆连接点分析,则杆2应该是对压杆斜向上的
力,故杆2受压力。对杆2和压杆连接点分析,杆1应该是对压杆斜向下的力,故受拉力。故答案选择
A。
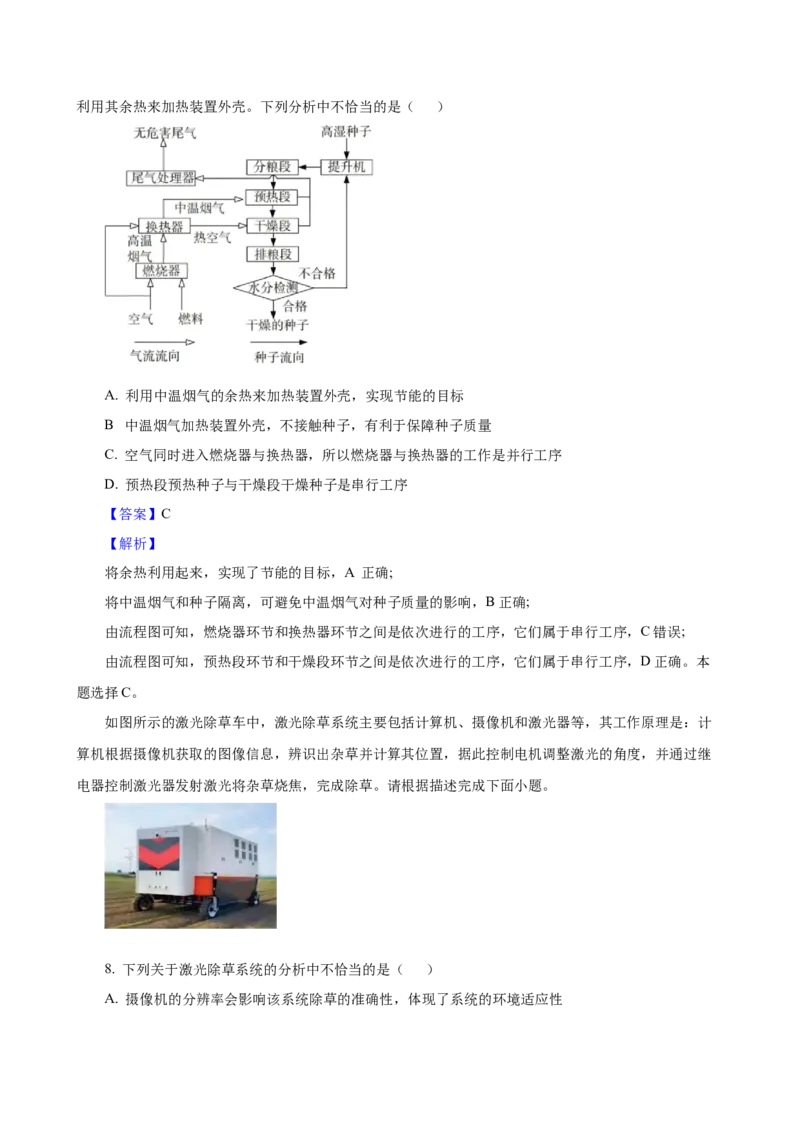
7. 如图所示为某种子烘干工艺流程。高湿种子经干燥后进行水分检测,不合格的种子重新进行烘干。
燃烧器产生的高温烟气被送入换热器来加热空气,热空气进入干燥段干燥种子;中温烟气被送入预热段,利用其余热来加热装置外壳。下列分析中不恰当的是( )
A. 利用中温烟气的余热来加热装置外壳,实现节能的目标
.
B 中温烟气加热装置外壳,不接触种子,有利于保障种子质量
C. 空气同时进入燃烧器与换热器,所以燃烧器与换热器的工作是并行工序
D. 预热段预热种子与干燥段干燥种子是串行工序
【答案】C
【解析】
将余热利用起来,实现了节能的目标,A 正确;
将中温烟气和种子隔离,可避免中温烟气对种子质量的影响,B正确;
由流程图可知,燃烧器环节和换热器环节之间是依次进行的工序,它们属于串行工序,C错误;
由流程图可知,预热段环节和干燥段环节之间是依次进行的工序,它们属于串行工序,D正确。本
题选择C。
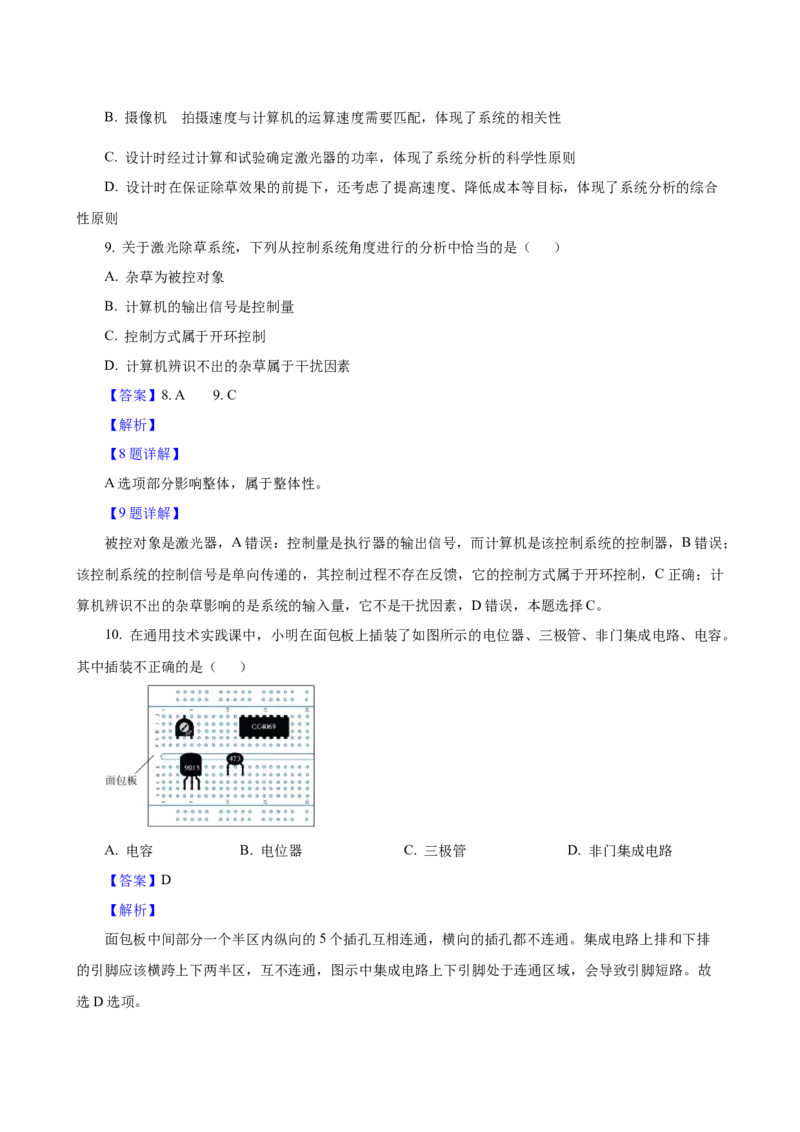
如图所示的激光除草车中,激光除草系统主要包括计算机、摄像机和激光器等,其工作原理是:计
算机根据摄像机获取的图像信息,辨识出杂草并计算其位置,据此控制电机调整激光的角度,并通过继
电器控制激光器发射激光将杂草烧焦,完成除草。请根据描述完成下面小题。
8. 下列关于激光除草系统的分析中不恰当的是( )
A. 摄像机的分辨率会影响该系统除草的准确性,体现了系统的环境适应性的
B. 摄像机 拍摄速度与计算机的运算速度需要匹配,体现了系统的相关性
C. 设计时经过计算和试验确定激光器的功率,体现了系统分析的科学性原则
D. 设计时在保证除草效果的前提下,还考虑了提高速度、降低成本等目标,体现了系统分析的综合
性原则
9. 关于激光除草系统,下列从控制系统角度进行的分析中恰当的是( )
A. 杂草为被控对象
B. 计算机的输出信号是控制量
C. 控制方式属于开环控制
D. 计算机辨识不出的杂草属于干扰因素
【答案】8. A 9. C
【解析】
【8题详解】
A选项部分影响整体,属于整体性。
【9题详解】
被控对象是激光器,A错误:控制量是执行器的输出信号,而计算机是该控制系统的控制器,B错误;
该控制系统的控制信号是单向传递的,其控制过程不存在反馈,它的控制方式属于开环控制,C正确;计
算机辨识不出的杂草影响的是系统的输入量,它不是干扰因素,D错误,本题选择C。
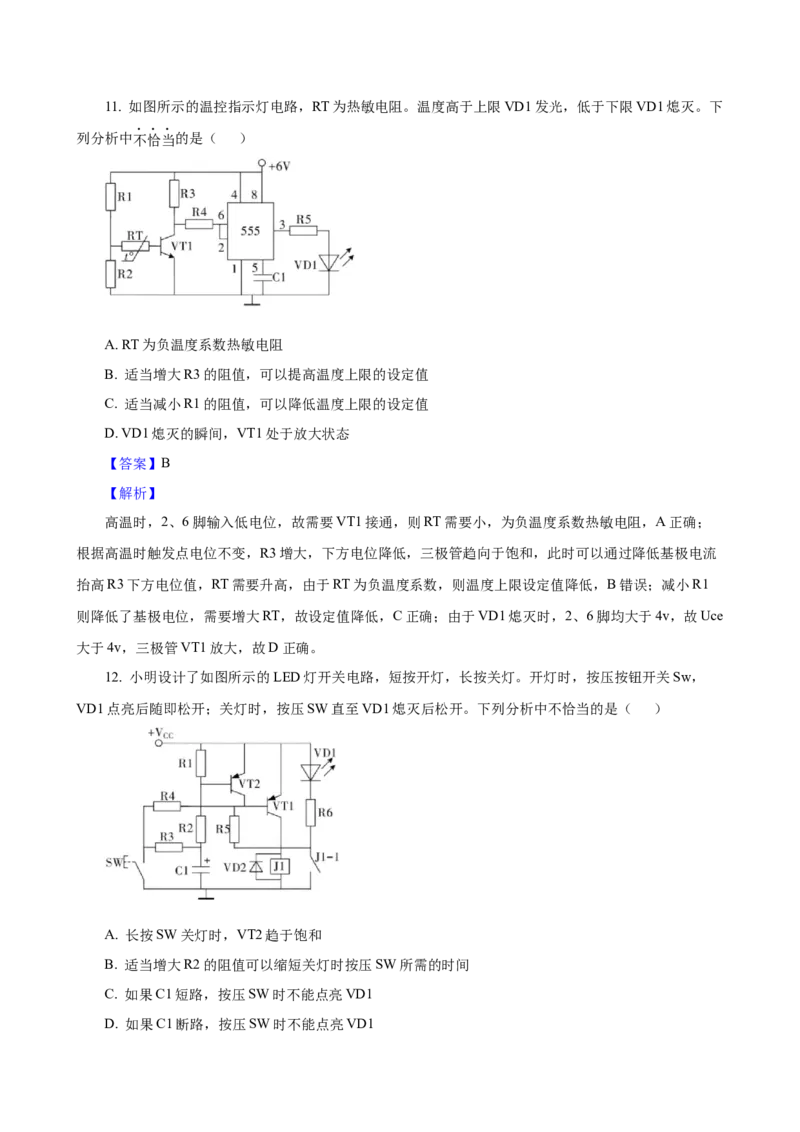
10. 在通用技术实践课中,小明在面包板上插装了如图所示的电位器、三极管、非门集成电路、电容。
其中插装不正确的是( )
A. 电容 B. 电位器 C. 三极管 D. 非门集成电路
【答案】D
【解析】
面包板中间部分一个半区内纵向的5个插孔互相连通,横向的插孔都不连通。集成电路上排和下排
的引脚应该横跨上下两半区,互不连通,图示中集成电路上下引脚处于连通区域,会导致引脚短路。故
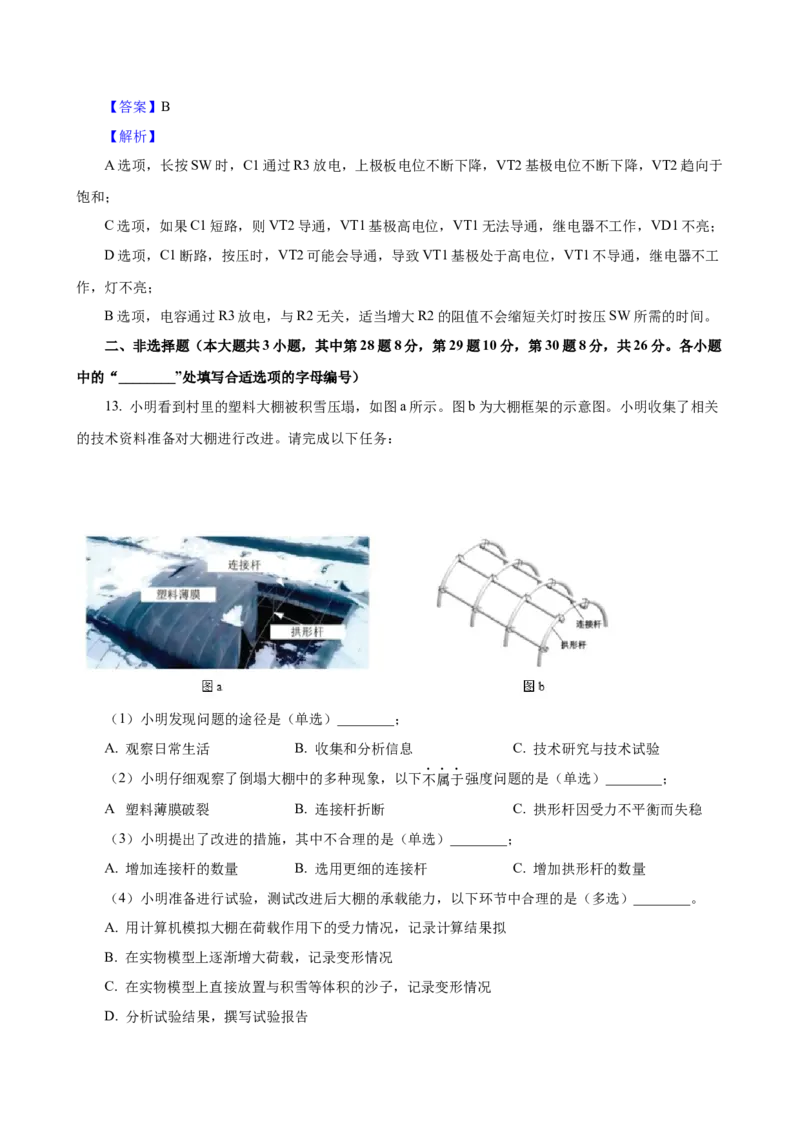
选D选项。11. 如图所示的温控指示灯电路,RT为热敏电阻。温度高于上限VD1发光,低于下限VD1熄灭。下
列分析中不恰当的是( )
A. RT为负温度系数热敏电阻
B. 适当增大R3的阻值,可以提高温度上限的设定值
C. 适当减小R1的阻值,可以降低温度上限的设定值
D. VD1熄灭的瞬间,VT1处于放大状态
【答案】B
【解析】
高温时,2、6脚输入低电位,故需要VT1接通,则RT需要小,为负温度系数热敏电阻,A正确;
根据高温时触发点电位不变,R3增大,下方电位降低,三极管趋向于饱和,此时可以通过降低基极电流
抬高R3下方电位值,RT需要升高,由于RT为负温度系数,则温度上限设定值降低,B错误;减小R1
则降低了基极电位,需要增大RT,故设定值降低,C正确;由于VD1熄灭时,2、6脚均大于4v,故Uce
大于4v,三极管VT1放大,故D正确。
12. 小明设计了如图所示的LED灯开关电路,短按开灯,长按关灯。开灯时,按压按钮开关Sw,
VD1点亮后随即松开;关灯时,按压SW直至VD1熄灭后松开。下列分析中不恰当的是( )
A. 长按SW关灯时,VT2趋于饱和
B. 适当增大R2的阻值可以缩短关灯时按压SW所需的时间
C. 如果C1短路,按压SW时不能点亮VD1
D. 如果C1断路,按压SW时不能点亮VD1【答案】B
【解析】
A选项,长按SW时,C1通过R3放电,上极板电位不断下降,VT2基极电位不断下降,VT2趋向于
饱和;
C选项,如果C1短路,则VT2导通,VT1基极高电位,VT1无法导通,继电器不工作,VD1不亮;
D选项,C1断路,按压时,VT2可能会导通,导致VT1基极处于高电位,VT1不导通,继电器不工
作,灯不亮;
B选项,电容通过R3放电,与R2无关,适当增大R2的阻值不会缩短关灯时按压SW所需的时间。
二、非选择题(本大题共3小题,其中第28题8分,第29题10分,第30题8分,共26分。各小题
中的“________”处填写合适选项的字母编号)
13. 小明看到村里的塑料大棚被积雪压塌,如图a所示。图b为大棚框架的示意图。小明收集了相关
的技术资料准备对大棚进行改进。请完成以下任务:
(1)小明发现问题的途径是(单选)________;
A. 观察日常生活 B. 收集和分析信息 C. 技术研究与技术试验
(2)小明仔细观察了倒塌大棚中的多种现象,以下不属于强度问题的是(单选)________;
.
A 塑料薄膜破裂 B. 连接杆折断 C. 拱形杆因受力不平衡而失稳
(3)小明提出了改进的措施,其中不合理的是(单选)________;
A. 增加连接杆的数量 B. 选用更细的连接杆 C. 增加拱形杆的数量
(4)小明准备进行试验,测试改进后大棚的承载能力,以下环节中合理的是(多选)________。
A. 用计算机模拟大棚在荷载作用下的受力情况,记录计算结果拟
B. 在实物模型上逐渐增大荷载,记录变形情况
C. 在实物模型上直接放置与积雪等体积的沙子,记录变形情况
D. 分析试验结果,撰写试验报告【答案】(1)A (2)C (3)B (4)ABD
【解析】
【小问1详解】
小明平时看到塑料大棚被积雪压塌发现问题的,所以途径是观察日常生活
【小问2详解】
结构的强度是指结构具有的抵抗被外力破坏的能力。A、B两个选项中,塑料薄膜破裂、连接杆折断
都是结构体被外力破坏,属于强度问题,C选项中的受力不平衡而失稳是结构稳定性的问题。
【小问3详解】
题中的改进是对结构体的强度进行增强,很明显,更细的连接杆是不合理的,故选择B
【小问4详解】
本小题考查技术试验的环节,A和D选项是合理的,比较容易判断。B和C选项是试验模型的最大
荷载能力。合理的方式应该是逐渐增大荷载,而不是一次直接放置与积雪等体积的沙子(等体积的沙子比
积雪重)可能会无法测试实物模型的荷载,所以选项C不合理
14. 为了保护塑料大棚的安全,小明想设计一个电动除雪装置。如图所示,在大棚两端的外侧增设整
体外形为圆弧形的导轨,除雪部件能沿着大棚上方来回移动,清除大棚表面的积雪。请你帮助小明设计
该装置的机械部分,设计要求如下:
(a)装置能驱动除雪部件可靠地在导轨上来回移动;
(b)除雪部件不能相对于导轨发生转动;
(c)导轨表面形状、截面形状不限,如表面带齿或带槽、截面方形或圆形等均可;
(d)采用电机驱动,通过电机的正反转或往复运动机构实现除雪部件的来回移动。
请完成以下任务:
(1)设计该装置时,不需考虑的是(单选)________;
A. 导轨的尺寸 B. 导轨的强度 C. 塑料薄膜的厚度 D. 装置质量的大小
(2)请在头脑中构思符合设计要求的多个方案,并画出其中最优方案的设计草图(导轨和除雪部件
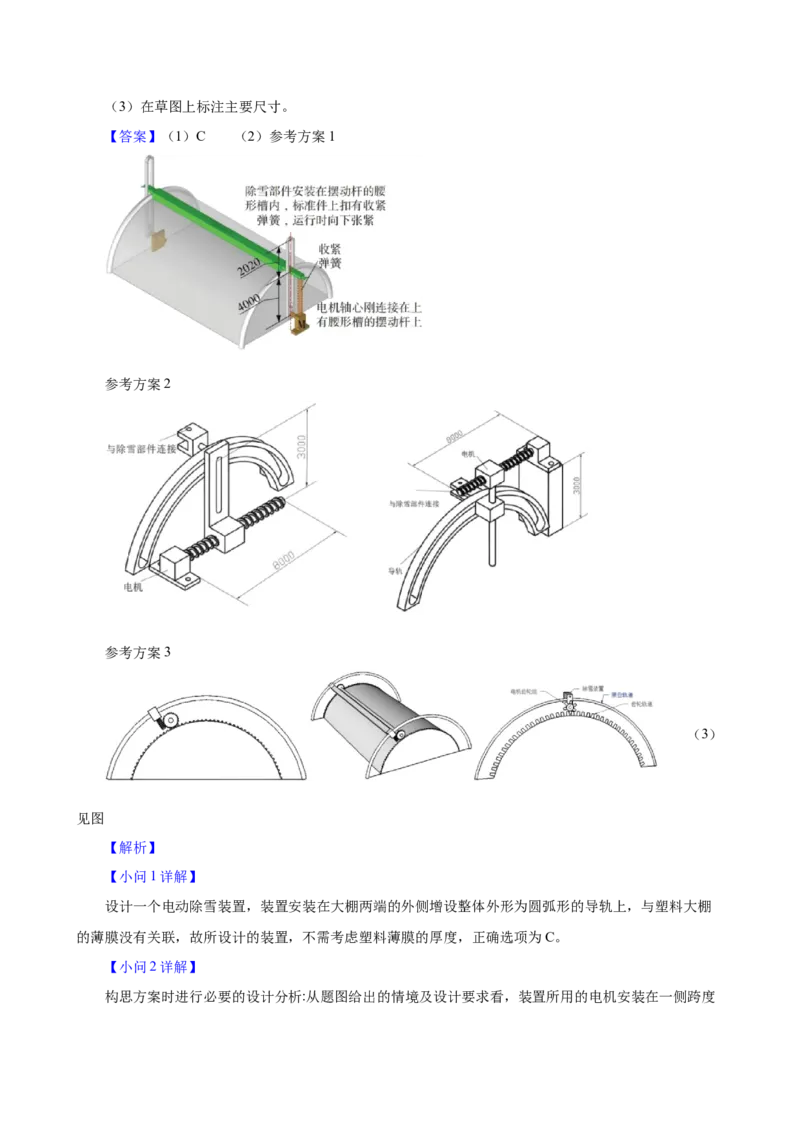
可用线条表达,电机可用方框表示,对称装置只需绘制一侧),简要说明方案的工作过程;(3)在草图上标注主要尺寸。
【答案】(1)C (2)参考方案1
参考方案2
参考方案3
(3)
见图
【解析】
【小问1详解】
设计一个电动除雪装置,装置安装在大棚两端的外侧增设整体外形为圆弧形的导轨上,与塑料大棚
的薄膜没有关联,故所设计的装置,不需考虑塑料薄膜的厚度,正确选项为C。
【小问2详解】
构思方案时进行必要的设计分析:从题图给出的情境及设计要求看,装置所用的电机安装在一侧跨度为8M的居中位置,利用电机的正反转通过所设计的传动机械带动除雪装置在导轨上来回运行,电机输出
为转矩,通过刚连接驱动除雪部件沿导轨运行,因为导轨轨迹不是正圆,驱动杆内应有空间,故驱动杆
上半段留有腰形槽,再辅以一定的向内支撑力即可满足设计要求。
【小问3详解】
同上。
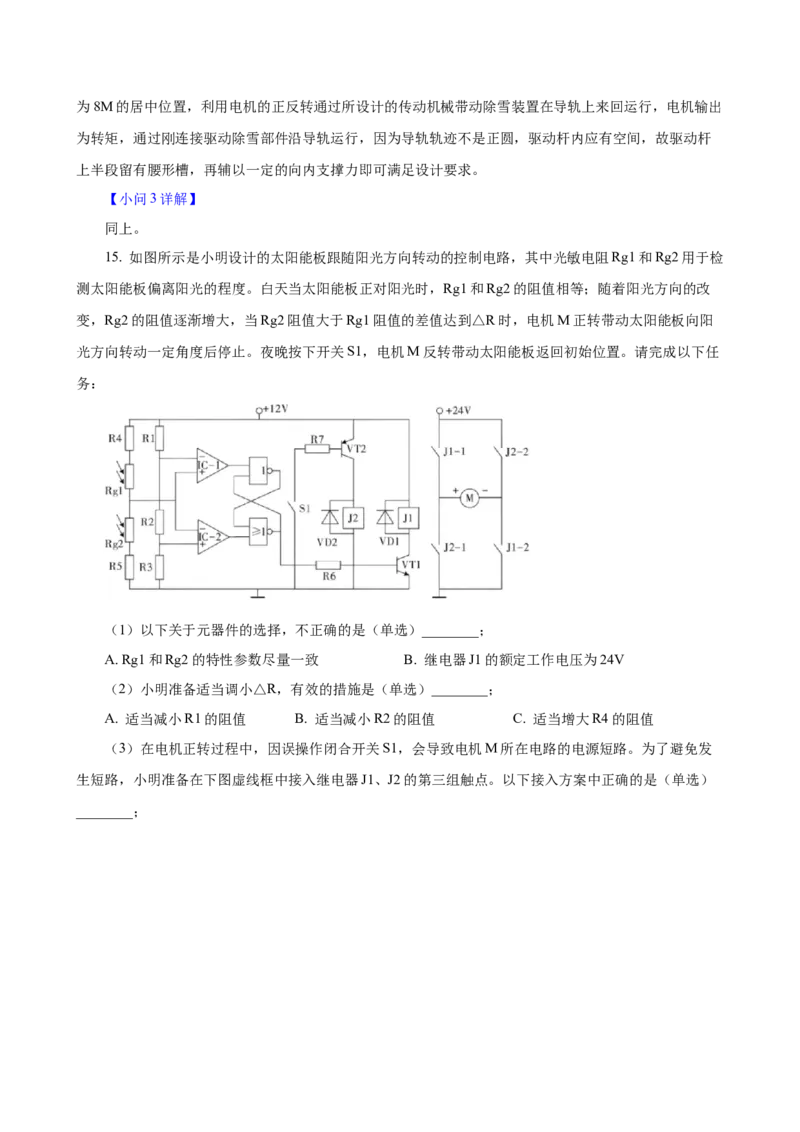
15. 如图所示是小明设计的太阳能板跟随阳光方向转动的控制电路,其中光敏电阻Rg1和Rg2用于检
测太阳能板偏离阳光的程度。白天当太阳能板正对阳光时,Rg1和Rg2的阻值相等;随着阳光方向的改
变,Rg2的阻值逐渐增大,当Rg2阻值大于Rg1阻值的差值达到△R时,电机M正转带动太阳能板向阳
光方向转动一定角度后停止。夜晚按下开关S1,电机M反转带动太阳能板返回初始位置。请完成以下任
务:
(1)以下关于元器件的选择,不正确的是(单选)________;
A. Rg1和Rg2的特性参数尽量一致 B. 继电器J1的额定工作电压为24V
(2)小明准备适当调小△R,有效的措施是(单选)________;
A. 适当减小R1的阻值 B. 适当减小R2的阻值 C. 适当增大R4的阻值
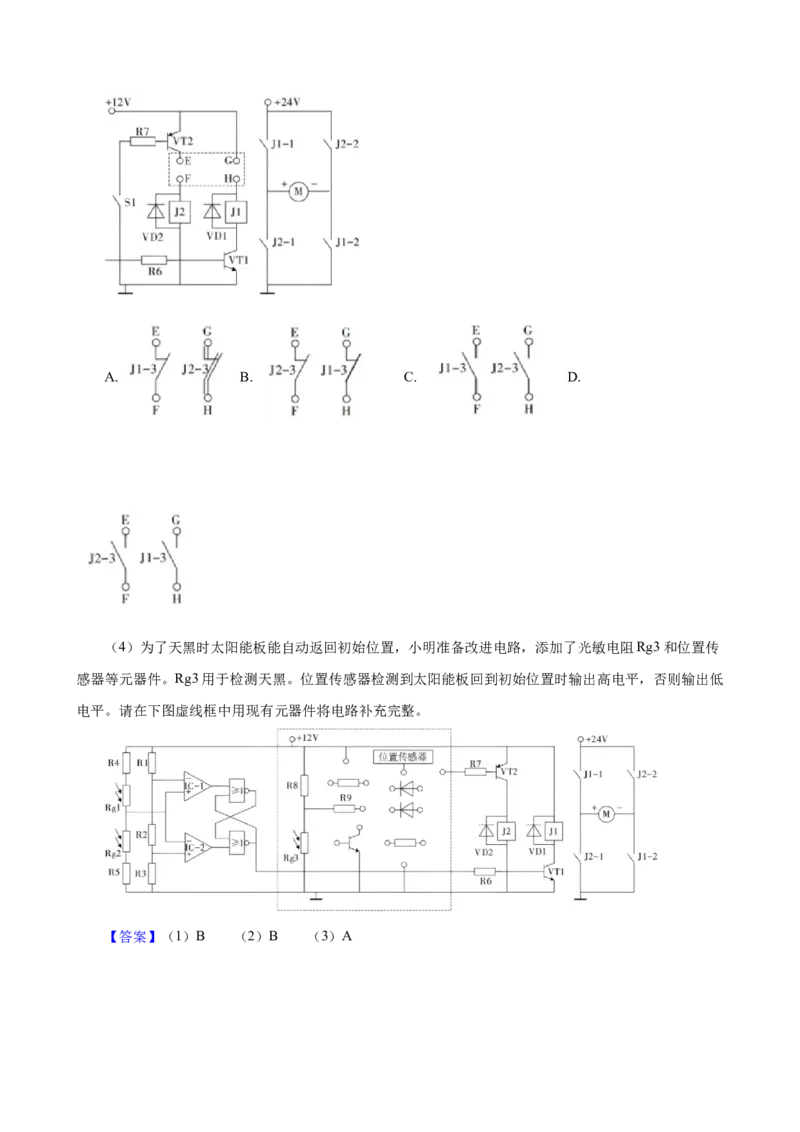
(3)在电机正转过程中,因误操作闭合开关S1,会导致电机M所在电路的电源短路。为了避免发
生短路,小明准备在下图虚线框中接入继电器J1、J2的第三组触点。以下接入方案中正确的是(单选)
________;A. B. C. D.
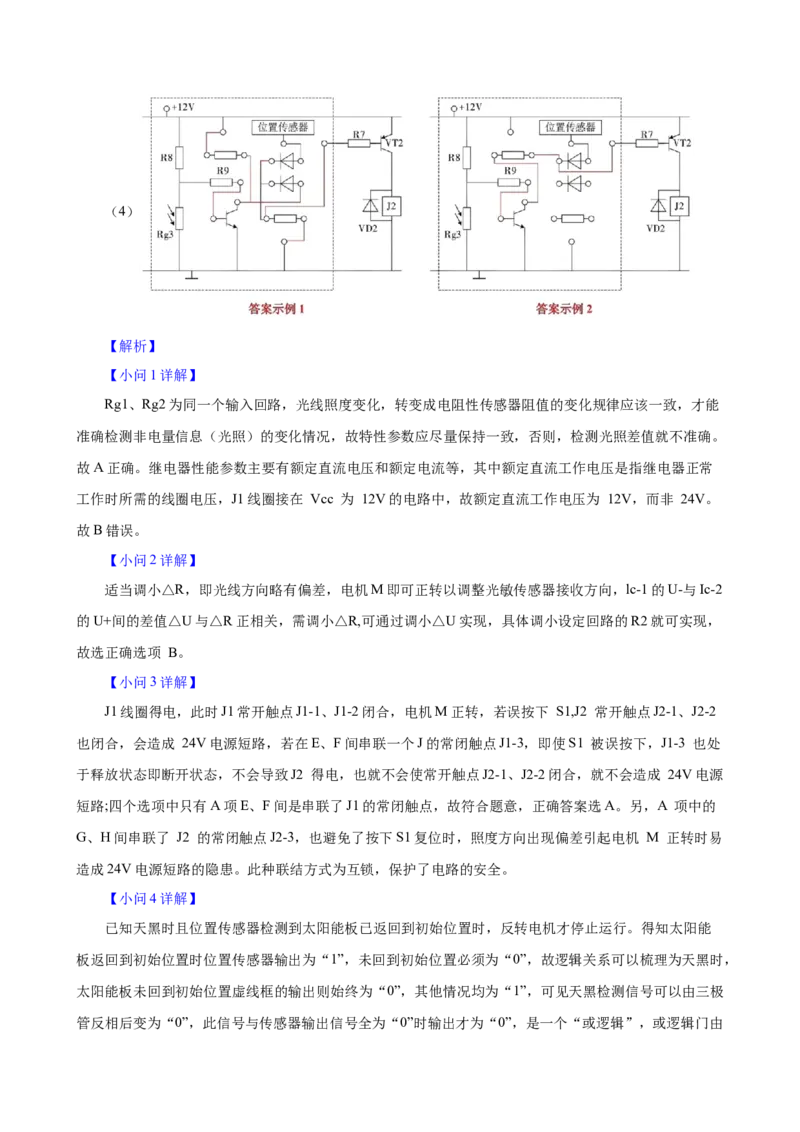
(4)为了天黑时太阳能板能自动返回初始位置,小明准备改进电路,添加了光敏电阻Rg3和位置传
感器等元器件。Rg3用于检测天黑。位置传感器检测到太阳能板回到初始位置时输出高电平,否则输出低
电平。请在下图虚线框中用现有元器件将电路补充完整。
【答案】(1)B (2)B (3)A(4)
【解析】
【小问1详解】
Rg1、Rg2为同一个输入回路,光线照度变化,转变成电阻性传感器阻值的变化规律应该一致,才能
准确检测非电量信息(光照)的变化情况,故特性参数应尽量保持一致,否则,检测光照差值就不准确。
故A正确。继电器性能参数主要有额定直流电压和额定电流等,其中额定直流工作电压是指继电器正常
工作时所需的线圈电压,J1线圈接在 Vcc 为 12V的电路中,故额定直流工作电压为 12V,而非 24V。
故B错误。
【小问2详解】
适当调小△R,即光线方向略有偏差,电机M即可正转以调整光敏传感器接收方向,lc-1的U-与Ic-2
的U+间的差值△U与△R正相关,需调小△R,可通过调小△U实现,具体调小设定回路的R2就可实现,
故选正确选项 B。
【小问3详解】
J1线圈得电,此时J1常开触点J1-1、J1-2闭合,电机M正转,若误按下 S1,J2 常开触点J2-1、J2-2
也闭合,会造成 24V电源短路,若在E、F间串联一个J的常闭触点J1-3,即使S1 被误按下,J1-3 也处
于释放状态即断开状态,不会导致J2 得电,也就不会使常开触点J2-1、J2-2闭合,就不会造成 24V电源
短路;四个选项中只有A项E、F间是串联了J1的常闭触点,故符合题意,正确答案选A。另,A 项中的
G、H间串联了 J2 的常闭触点J2-3,也避免了按下S1复位时,照度方向出现偏差引起电机 M 正转时易
造成24V电源短路的隐患。此种联结方式为互锁,保护了电路的安全。
【小问4详解】
已知天黑时且位置传感器检测到太阳能板已返回到初始位置时,反转电机才停止运行。得知太阳能
板返回到初始位置时位置传感器输出为“1”,未回到初始位置必须为“0”,故逻辑关系可以梳理为天黑时,
太阳能板未回到初始位置虚线框的输出则始终为“0”,其他情况均为“1”,可见天黑检测信号可以由三极
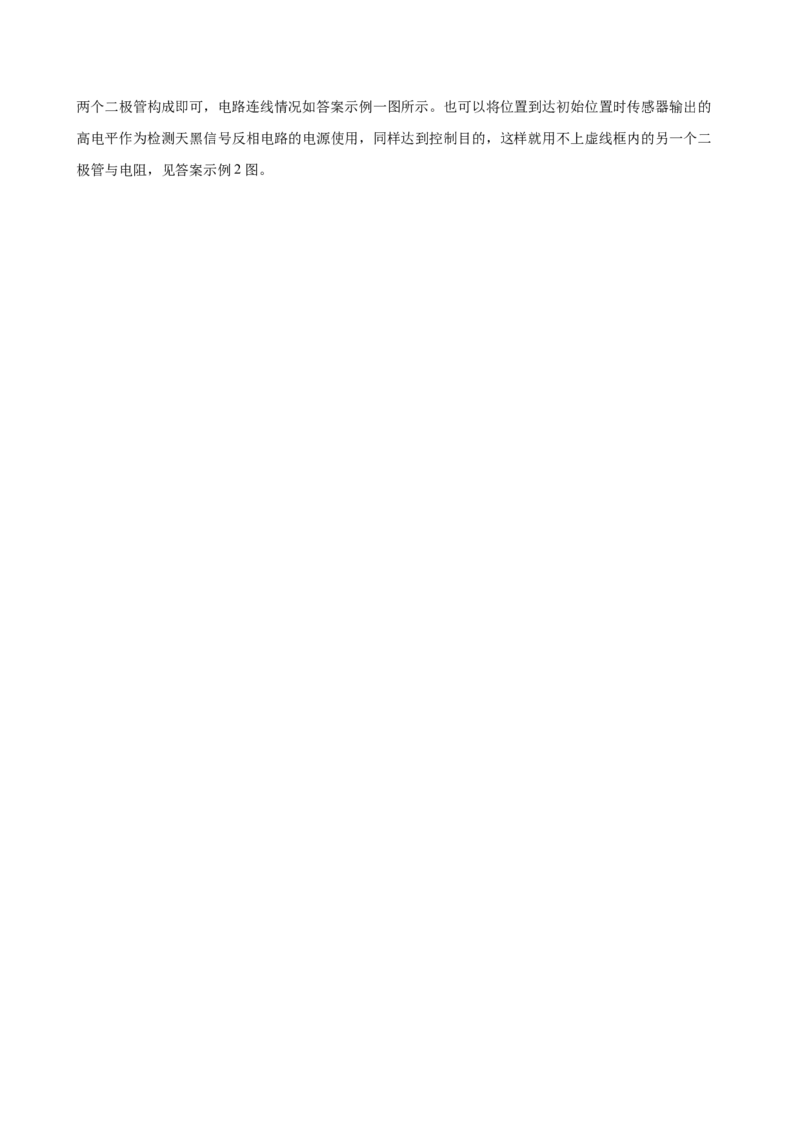
管反相后变为“0”,此信号与传感器输出信号全为“0”时输出才为“0”,是一个“或逻辑”,或逻辑门由两个二极管构成即可,电路连线情况如答案示例一图所示。也可以将位置到达初始位置时传感器输出的
高电平作为检测天黑信号反相电路的电源使用,同样达到控制目的,这样就用不上虚线框内的另一个二
极管与电阻,见答案示例2图。
