

文档内容
第1讲 力与物体的平衡锁定主干知识
CONTENTS 01
探明高考考向
02
精研典型例题
03
拓展思维空间
04
提升关键能力
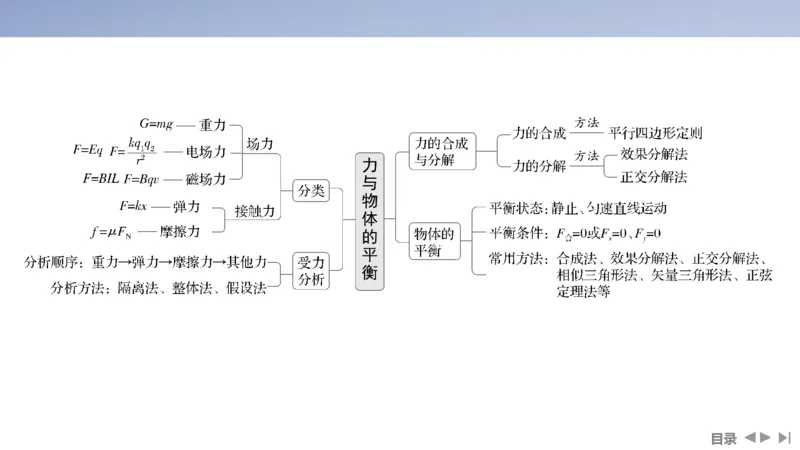
05锁定主干知识
目录目录探明高考考向
目录. ( 吉林高考 题)利用砚台将墨条研磨成墨汁时讲究“圆、缓、
1 2024· 3
匀”。如图,在研磨过程中,砚台始终静止在水平桌面上。当墨条的速
度方向水平向左时( )
. 砚台对墨条的摩擦力方向水平向左
A
. 桌面对砚台的摩擦力方向水平向左
B
√C . 桌面和墨条对砚台的摩擦力是一对平衡力
. 桌面对砚台的支持力与墨条对砚台的压力是一对平衡力
D
目录解析: 滑动摩擦力方向与物体间的相对运动方向相反,墨条相
对砚台水平向左运动,则砚台对墨条的摩擦力方向水平向右, 错
A
误;根据牛顿第三定律,砚台受到墨条水平向左的摩擦力,而砚台
处于静止状态,其水平方向上受力平衡,则桌面对砚台的摩擦力方
向水平向右,桌面和墨条对砚台的摩擦力是一对平衡力, 错误,
B C
正确;对砚台受力分析,竖直方向上,砚台受到自身重力、墨条的
压力和桌面的支持力,因此桌面对砚台的支持力与墨条对砚台的压
力不是一对平衡力, 错误。
D
目录. ( 山东高考 题)如图所示,国产人形机器人“天工”能平稳通过
2 2024· 2
斜坡。若它可以在倾角不大于 °的斜坡上稳定地站立和行走,且最大
30
静摩擦力等于滑动摩擦力,则它的脚和斜面间的动摩擦因数不能小于
( )
. √
A .
B
1
3
2
3
. .
C D
2 3
2 2
目录解析: 斜坡倾角越大,“天工”越容易下滑,只要保证“天工”在
°倾角的斜坡上不下滑,在小于 °倾角的斜坡上更不会下滑,对
30 30
°倾角的斜坡上的“天工”受力分析,有 °≥ °,
30 μmgcos 30 mgsin 30
解得 ≥ , 正确。
μ B
3
3
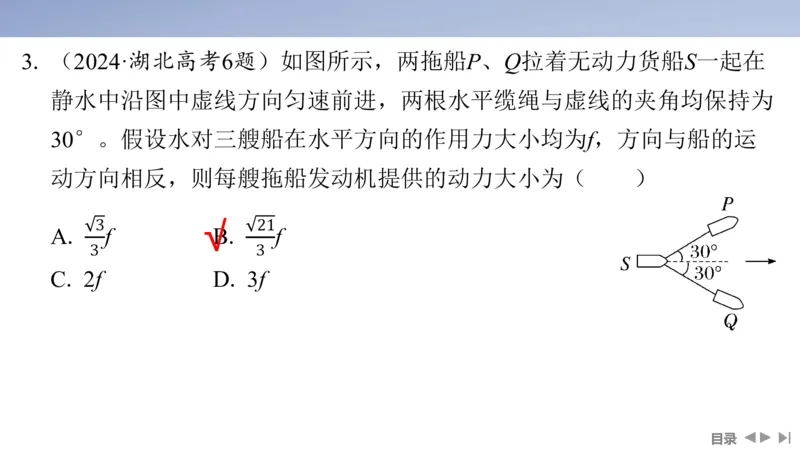
目录. ( 湖北高考 题)如图所示,两拖船 、 拉着无动力货船 一起在
3 2024· 6 P Q S
静水中沿图中虚线方向匀速前进,两根水平缆绳与虚线的夹角均保持为
°。假设水对三艘船在水平方向的作用力大小均为 ,方向与船的运
30 f
动方向相反,则每艘拖船发动机提供的动力大小为( )
√
. .
A f B f
3 21
. .
C 2f D 3f
3 3
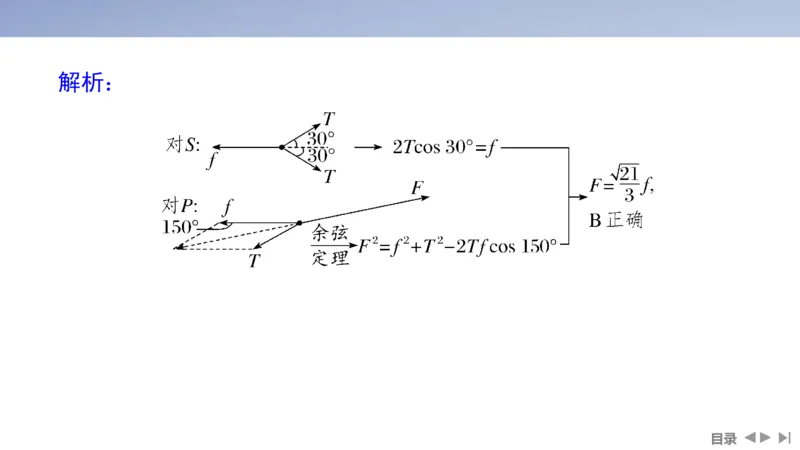
目录解析:
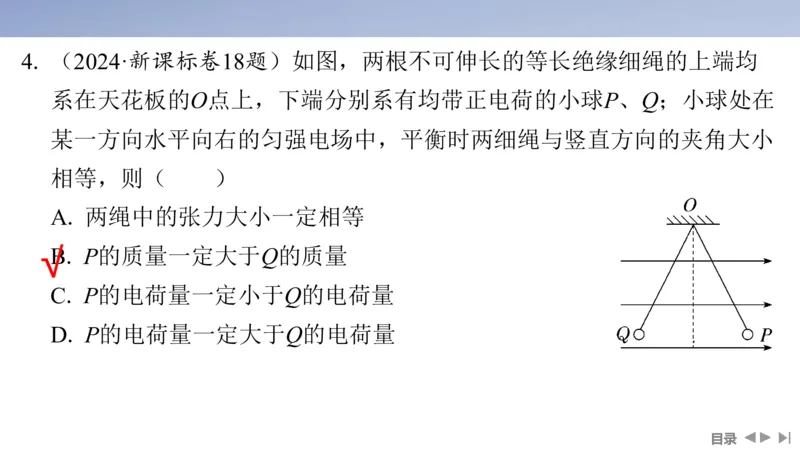
目录. ( 新课标卷 题)如图,两根不可伸长的等长绝缘细绳的上端均
4 2024· 18
系在天花板的 点上,下端分别系有均带正电荷的小球 、 ;小球处在
O P Q
某一方向水平向右的匀强电场中,平衡时两细绳与竖直方向的夹角大小
相等,则( )
. 两绳中的张力大小一定相等
A
. 的质量一定大于 的质量
√B P Q
. 的电荷量一定小于 的电荷量
C P Q
. 的电荷量一定大于 的电荷量
D P Q
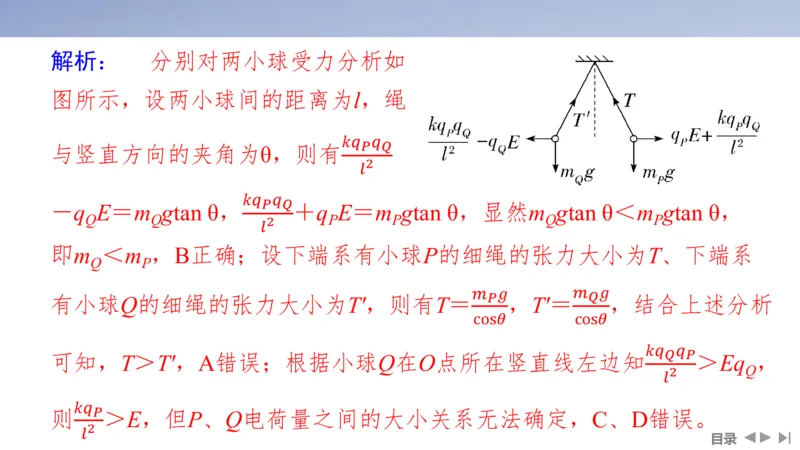
目录解析: 分别对两小球受力分析如
图所示,设两小球间的距离为 ,绳
l
与竖直方向的夹角为 ,则有
θ
2
- = , + = ,显然 < ,
q E m gtan θ q E m gtan θ m gtan θ m gtan θ
Q Q P P Q P
即
m
<
m
,
B
正确;设2 下端系有小球
P
的细绳的张力大小为
T
、下端系
Q P
有小球 的细绳的张力大小为 ,则有 = , = ,结合上述分析
Q T' T T'
可知, > , 错误;根据小球 在 点所co在s 竖直线c左os 边知 > ,
T T' A Q O Eq
Q
2
则 > ,但 、 电荷量之间的大小关系无法确定, 、 错 误。
E P Q C D
目录
2
精研典型例题
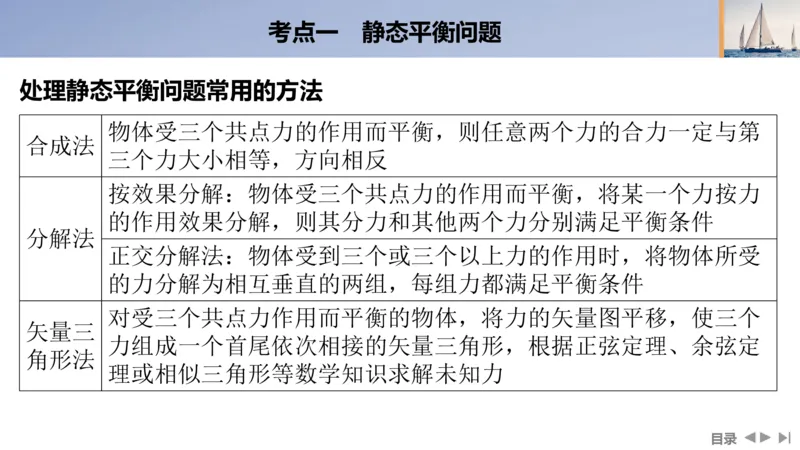
目录考点一 静态平衡问题
处理静态平衡问题常用的方法
物体受三个共点力的作用而平衡,则任意两个力的合力一定与第
合成法
三个力大小相等,方向相反
按效果分解:物体受三个共点力的作用而平衡,将某一个力按力
的作用效果分解,则其分力和其他两个力分别满足平衡条件
分解法
正交分解法:物体受到三个或三个以上力的作用时,将物体所受
的力分解为相互垂直的两组,每组力都满足平衡条件
对受三个共点力作用而平衡的物体,将力的矢量图平移,使三个
矢量三
力组成一个首尾依次相接的矢量三角形,根据正弦定理、余弦定
角形法
理或相似三角形等数学知识求解未知力
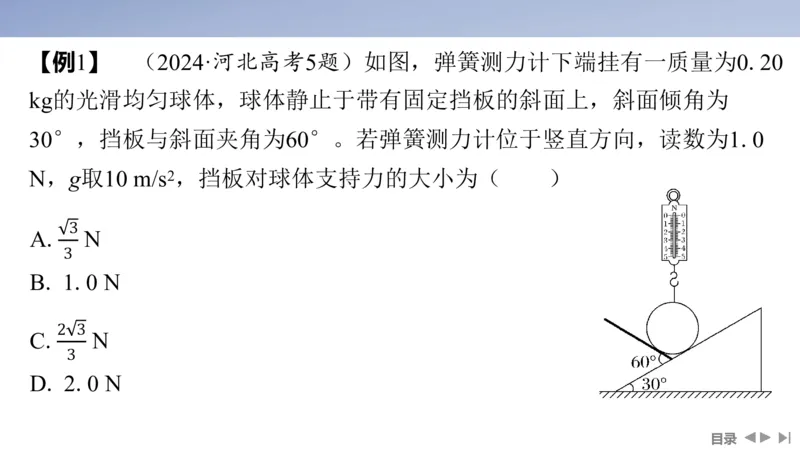
目录【例1】 ( 2024· 河北高考 5 题)如图,弹簧测力计下端挂有一质量为 0 . 20
的光滑均匀球体,球体静止于带有固定挡板的斜面上,斜面倾角为
kg
°,挡板与斜面夹角为 °。若弹簧测力计位于竖直方向,读数为 .
30 60 1 0
, 取 ,挡板对球体支持力的大小为( )
N g 10 m/s2
.
A N
3
. .
B 1 0 N
3
.
C N
2 3
. .
D 2 0 N
3
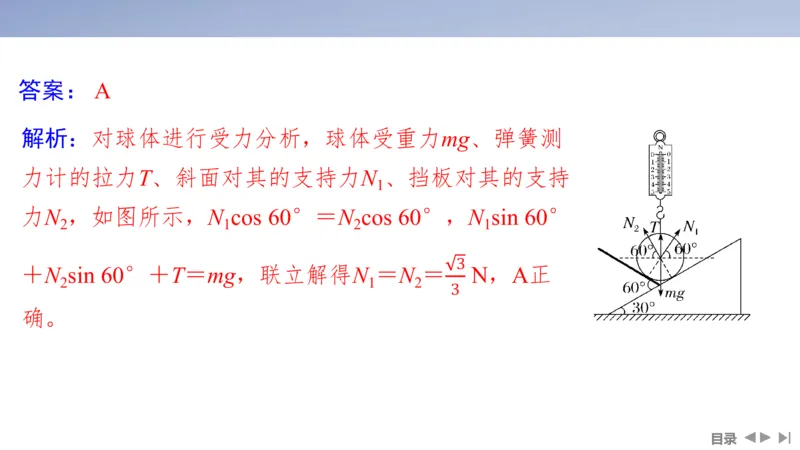
目录答案:
A
解析:对球体进行受力分析,球体受重力 、弹簧测
mg
力计的拉力 、斜面对其的支持力 、挡板对其的支持
T N
1
力 ,如图所示, °= °, °
N N cos 60 N cos 60 N sin 60
2 1 2 1
+ °+ = ,联立解得 = = , 正
N sin 60 T mg N N N A
2 1 2
3
确。
3
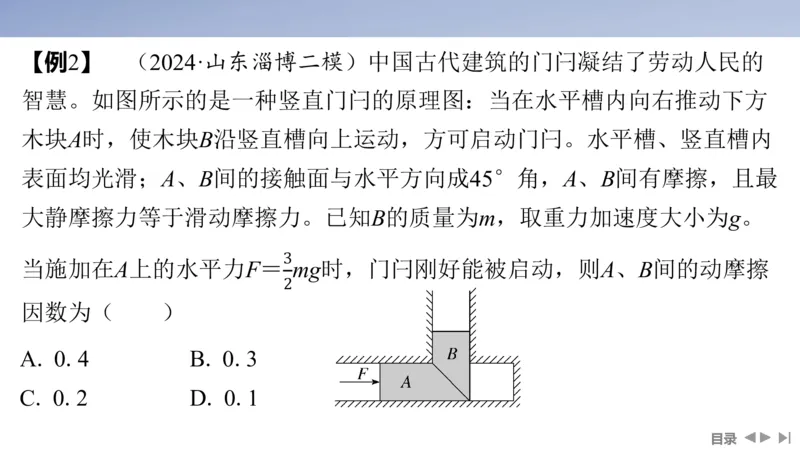
目录【例2】
(
2024·
山东淄博二模)中国古代建筑的门闩凝结了劳动人民的
智慧。如图所示的是一种竖直门闩的原理图:当在水平槽内向右推动下方
木块 时,使木块 沿竖直槽向上运动,方可启动门闩。水平槽、竖直槽内
A B
表面均光滑; 、 间的接触面与水平方向成 °角, 、 间有摩擦,且最
A B 45 A B
大静摩擦力等于滑动摩擦力。已知 的质量为 ,取重力加速度大小为 。
B m g
当施加在 上的水平力 = 时,门闩刚好能被启动,则 、 间的动摩擦
A F mg A B
3
因数为( )
2
. . . .
A 0 4 B 0 3
. . . .
C 0 2 D 0 1
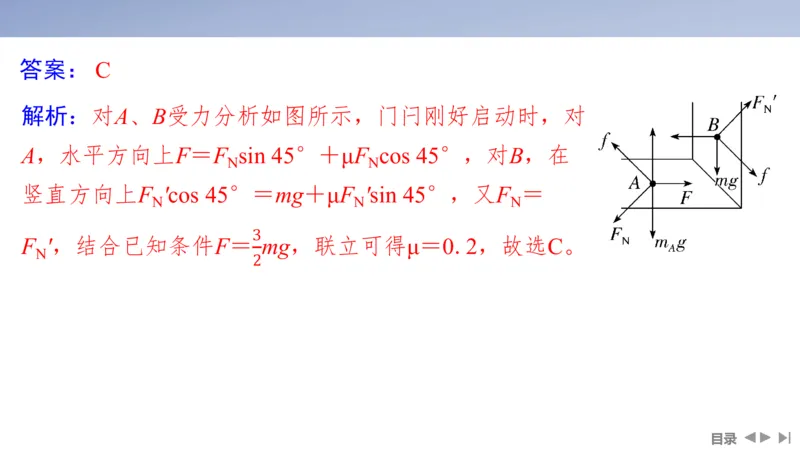
目录答案:
C
解析:对 、 受力分析如图所示,门闩刚好启动时,对
A B
,水平方向上 = °+ °,对 ,在
A F F sin 45 μF cos 45 B
N N
竖直方向上 °= + °,又 =
F 'cos 45 mg μF 'sin 45 F
N N N
,结合已知条件 = ,联立可得 = . ,故选 。
F ' F mg μ 0 2 C
N
3
2
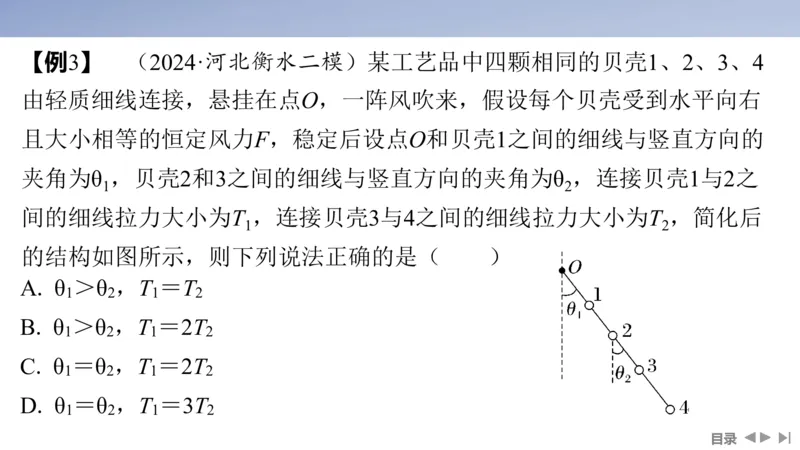
目录【例3】
(
2024·
河北衡水二模)某工艺品中四颗相同的贝壳
1
、
2
、
3
、
4
由轻质细线连接,悬挂在点 ,一阵风吹来,假设每个贝壳受到水平向右
O
且大小相等的恒定风力 ,稳定后设点 和贝壳 之间的细线与竖直方向的
F O 1
夹角为 ,贝壳 和 之间的细线与竖直方向的夹角为 ,连接贝壳 与 之
θ 2 3 θ 1 2
1 2
间的细线拉力大小为 ,连接贝壳 与 之间的细线拉力大小为 ,简化后
T 3 4 T
1 2
的结构如图所示,则下列说法正确的是( )
. > , =
A θ θ T T
1 2 1 2
. > , =
B θ θ T 2T
1 2 1 2
. = , =
C θ θ T 2T
1 2 1 2
. = , =
D θ θ T 3T
1 2 1 2
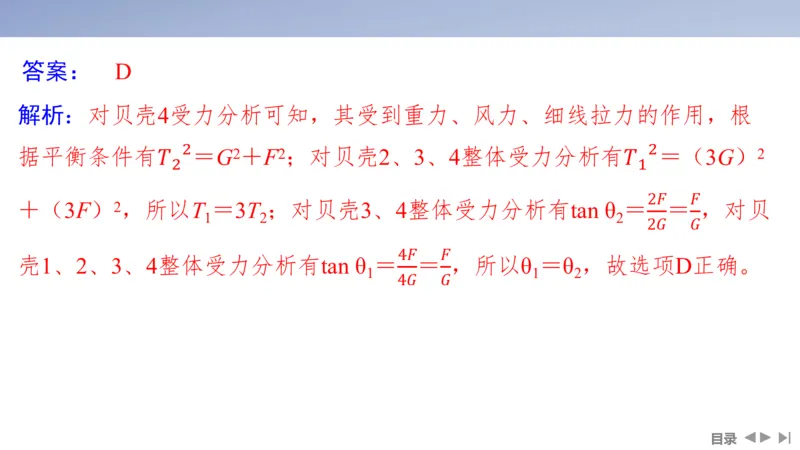
目录答案:
D
解析:对贝壳 受力分析可知,其受到重力、风力、细线拉力的作用,根
4
据平衡条件有 = + ;对贝壳 、 、 整体受力分析有 =( )
G2 F2 2 3 4 3G 2
2 2
2 1
+( ) ,所 以 = ;对贝壳 、 整体受力分析有 = = ,对贝
3F 2 T 3T 3 4 tan θ
1 2 2
2
壳 、 、 、 整体受力分析有 = = ,所以 = ,故选2项 正确。
1 2 3 4 tan θ θ θ D
1 1 2
4
4
目录整体法、隔离法的运用
在处理共点力平衡的问题时,若出现了两个或多个物体,一般会使用
整体法或隔离法,也可以使用“整体法+隔离法”或“隔离法+隔离
法”,可根据具体题目灵活应用。
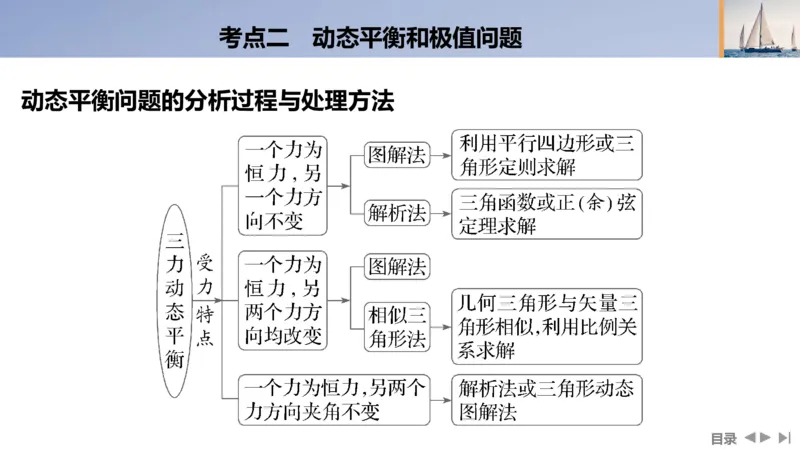
目录考点二 动态平衡和极值问题
动态平衡问题的分析过程与处理方法
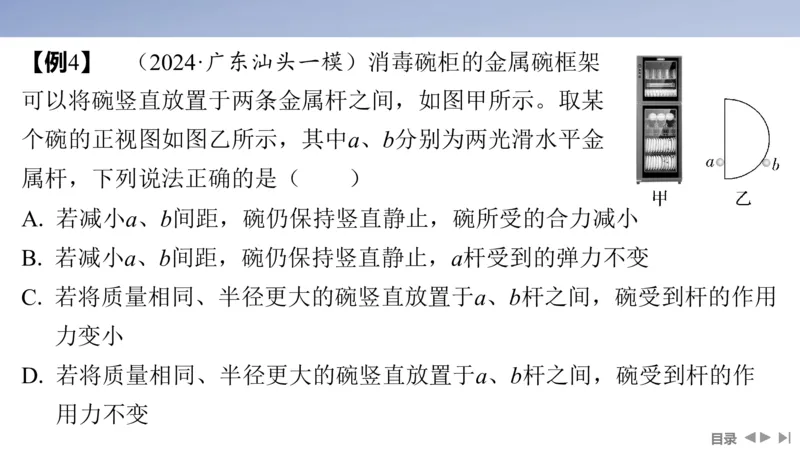
目录【例4】
(
2024·
广东汕头一模)消毒碗柜的金属碗框架
可以将碗竖直放置于两条金属杆之间,如图甲所示。取某
个碗的正视图如图乙所示,其中 、 分别为两光滑水平金
a b
属杆,下列说法正确的是( )
. 若减小 、 间距,碗仍保持竖直静止,碗所受的合力减小
A a b
. 若减小 、 间距,碗仍保持竖直静止, 杆受到的弹力不变
B a b a
. 若将质量相同、半径更大的碗竖直放置于 、 杆之间,碗受到杆的作用
C a b
力变小
. 若将质量相同、半径更大的碗竖直放置于 、 杆之间,碗受到杆的作
D a b
用力不变
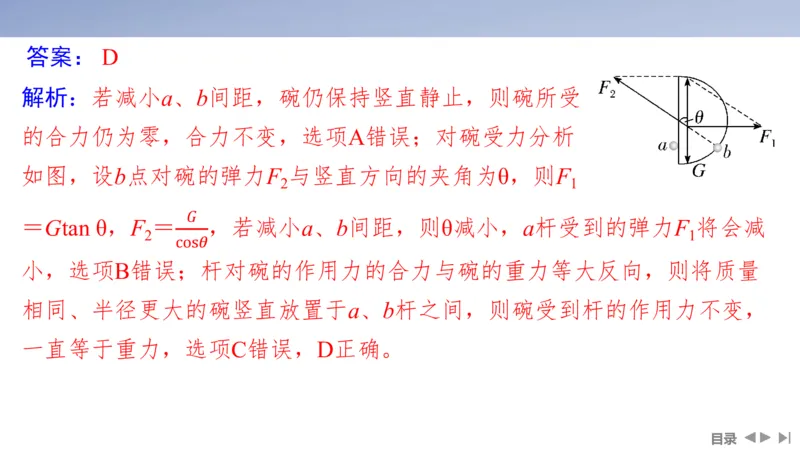
目录答案:
D
解析:若减小 、 间距,碗仍保持竖直静止,则碗所受
a b
的合力仍为零,合力不变,选项 错误;对碗受力分析
A
如图,设 点对碗的弹力 与竖直方向的夹角为 ,则
b F θ F
2 1
= , = ,若减小 、 间距,则 减小, 杆受到的弹力 将会减
Gtan θ F a b θ a F
2 1
小,选项 错误;杆对碗的作用力的合力与碗的重力等大反向,则将质量
B
cos
相同、半径更大的碗竖直放置于 、 杆之间,则碗受到杆的作用力不变,
a b
一直等于重力,选项 错误, 正确。
C D
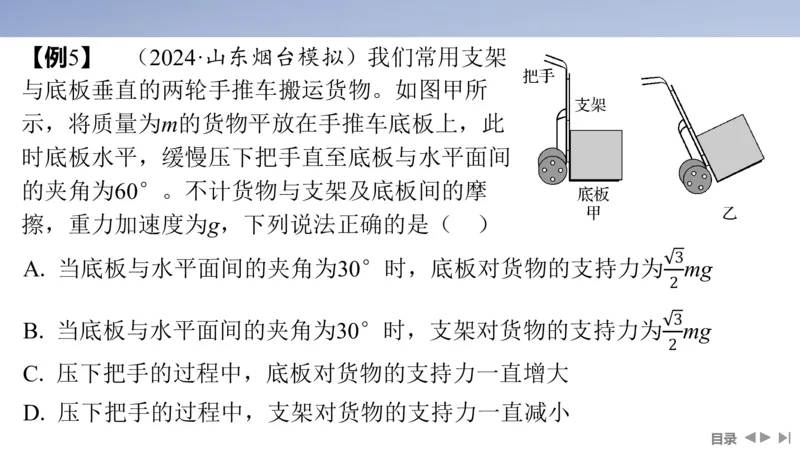
目录【例5】
(
2024·
山东烟台模拟)我们常用支架
与底板垂直的两轮手推车搬运货物。如图甲所
示,将质量为 的货物平放在手推车底板上,此
m
时底板水平,缓慢压下把手直至底板与水平面间
的夹角为 °。不计货物与支架及底板间的摩
60
擦,重力加速度为 ,下列说法正确的是( )
g
. 当底板与水平面间的夹角为 °时,底板对货物的支持力为
A 30 mg
3
2
. 当底板与水平面间的夹角为 °时,支架对货物的支持力为
B 30 mg
3
. 压下把手的过程中,底板对货物的支持力一直增大
C
2
. 压下把手的过程中,支架对货物的支持力一直减小
D
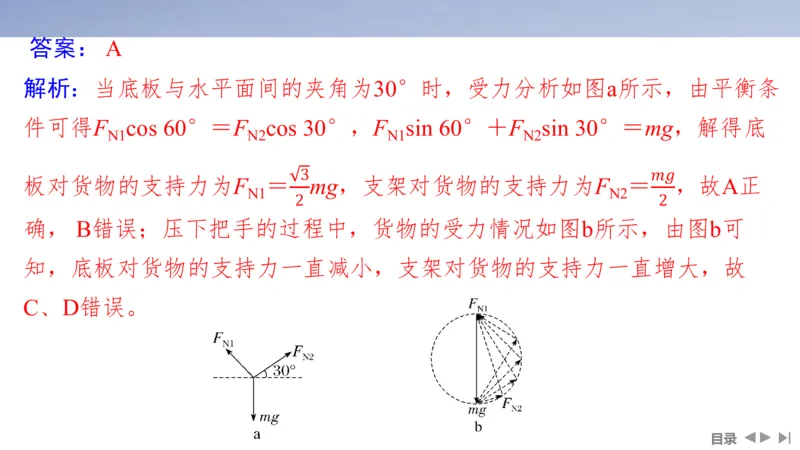
目录答案:
A
解析:当底板与水平面间的夹角为 °时,受力分析如图 所示,由平衡条
30 a
件可得 °= °, °+ °= ,解得底
F cos 60 F cos 30 F sin 60 F sin 30 mg
N1 N2 N1 N2
板对货物的支持力为 = ,支架对货物的支持力为 = ,故 正
F mg F A
N1 N2
3
确, 错误;压下把手的过程中,货物的受力情况如图 所示,由图 可
B b b
2 2
知,底板对货物的支持力一直减小,支架对货物的支持力一直增大,故
、 错误。
C D
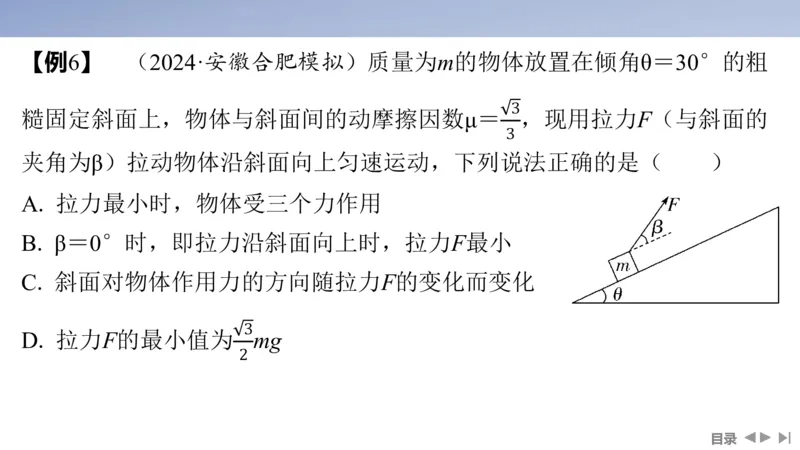
目录【例6】
(
2024·
安徽合肥模拟)质量为
m
的物体放置在倾角
θ
=
30
°的粗
糙固定斜面上,物体与斜面间的动摩擦因数 = ,现用拉力 (与斜面的
μ F
3
夹角为 )拉动物体沿斜面向上匀速运动,下列说法正确的是( )
β
3
. 拉力最小时,物体受三个力作用
A
. = °时,即拉力沿斜面向上时,拉力 最小
B β 0 F
. 斜面对物体作用力的方向随拉力 的变化而变化
C F
. 拉力 的最小值为
D F mg
3
2
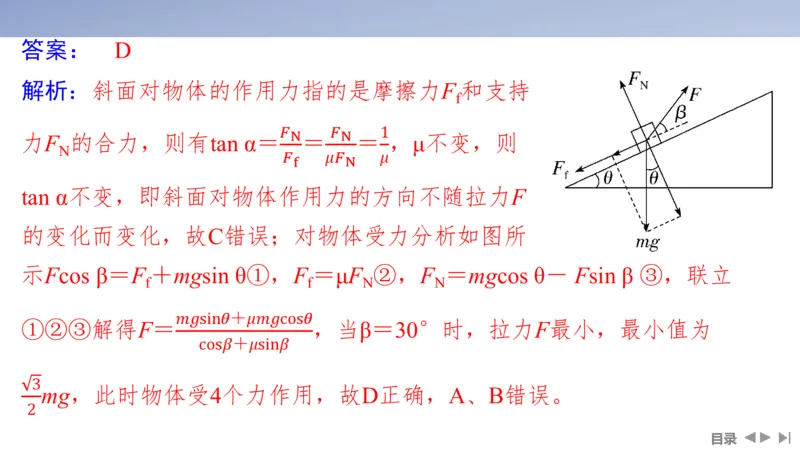
目录答案:
D
解析:斜面对物体的作用力指的是摩擦力 和支持
F
f
力 的合力,则有 = = = , 不变,则
F tan α μ
N
N N 1
tan α 不变,即斜面对物体作 f 用力 N的方 向不随拉力 F
的变化而变化,故 错误;对物体受力分析如图所
C
示 = + ①, = ②, = - ③,联立
Fcos β F mgsin θ F μF F mgcos θ Fsin β
f f N N
+
①②③解得 = ,当 = °时,拉力 最小,最小值为
F β 30 F
+
sin cos
cos sin
,此时物体受 个力作用,故 正确, 、 错误。
mg 4 D A B
3
目录
2考点三 电磁场中的平衡问题
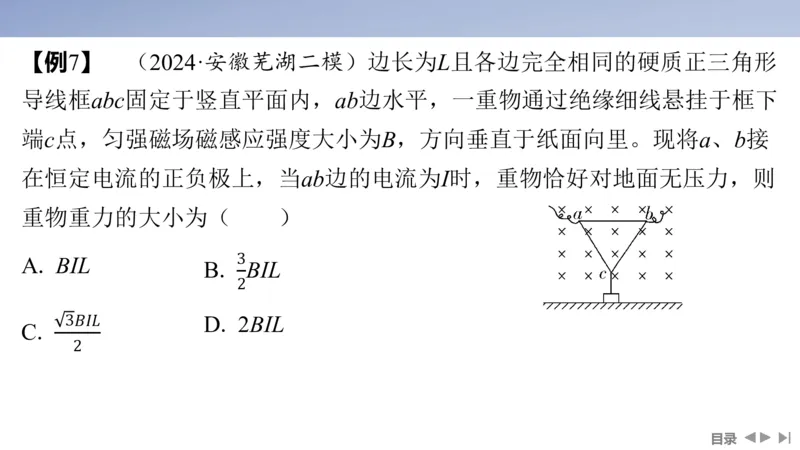
目录【例7】
(
2024·
安徽芜湖二模)边长为
L
且各边完全相同的硬质正三角形
导线框 固定于竖直平面内, 边水平,一重物通过绝缘细线悬挂于框下
abc ab
端 点,匀强磁场磁感应强度大小为 ,方向垂直于纸面向里。现将 、 接
c B a b
在恒定电流的正负极上,当 边的电流为 时,重物恰好对地面无压力,则
ab I
重物重力的大小为( )
.
A BIL .
B BIL
3
D . 22BIL
.
C
3
2
目录答案:
B
解析:以重物为研究对象,根据平衡条件有 = + ,解得 =
mg BIL BIL mg
1
,故选 。 2
BIL B
3
2
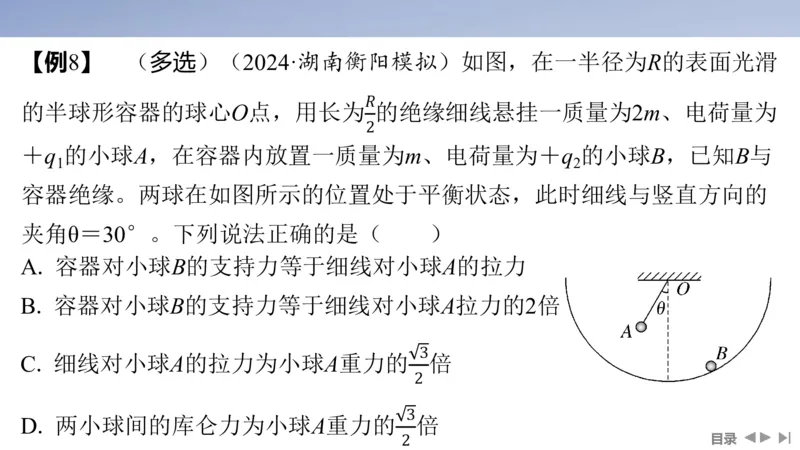
目录【例8】
(
多选
)(
2024·
湖南衡阳模拟)如图,在一半径为
R
的表面光滑
的半球形容器的球心 点,用长为 的绝缘细线悬挂一质量为 、电荷量为
O 2m
+ 的小球 ,在容器内放置一质量为 、电荷量为+ 的小球 ,已知 与
q A m q B B
1 2 2
容器绝缘。两球在如图所示的位置处于平衡状态,此时细线与竖直方向的
夹角 = °。下列说法正确的是( )
θ 30
. 容器对小球 的支持力等于细线对小球 的拉力
A B A
. 容器对小球 的支持力等于细线对小球 拉力的 倍
B B A 2
. 细线对小球 的拉力为小球 重力的 倍
C A A
3
2
. 两小球间的库仑力为小球 重力的 倍
D A
目录
3
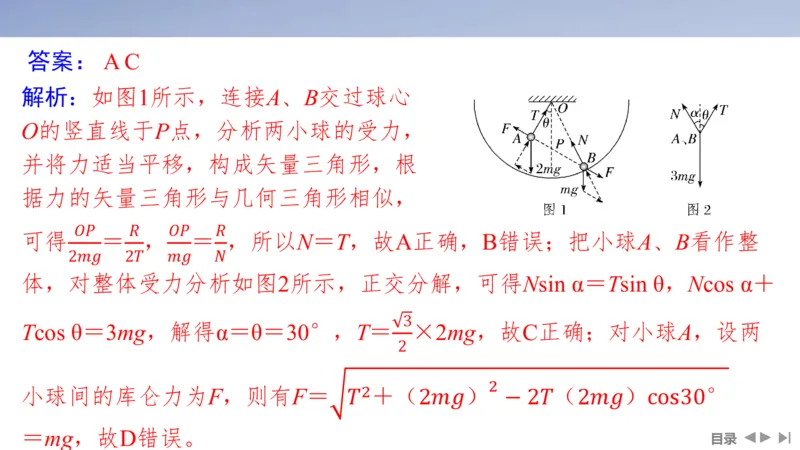
2答案:
A C
解析:如图 所示,连接 、 交过球心
1 A B
的竖直线于 点,分析两小球的受力,
O P
并将力适当平移,构成矢量三角形,根
据力的矢量三角形与几何三角形相似,
可得 = , = ,所以 = ,故 正确, 错误;把小球 、 看作整
N T A B A B
体,对整体受力分析如图 所示,正交分解,可得 = , +
2 Nsin α Tsin θ Ncos α
2 2
= ,解得 = = °, = × ,故 正确;对小球 ,设两
Tcos θ 3mg α θ 30 T 2mg C A
3
2
小球间的库仑力为 ,则有 = +( ) ( ) °
F F
2
2
= ,故 错误。
mg D
目录
2 − 2 2 cos30拓展思维空间
目录三维空间中的平衡问题
质点受到分散于三维空间的作用力而平衡,就是三维共点力平
衡。解决这类问题的一般方法是将三维空间问题转化为直线和平面问
题:选取合适的直线和平面,然后将不在直线和平面上的力分解到选
定的直线和平面上,物体在三维共点力作用下平衡,则在选定的直线
上和平面上合力为零。
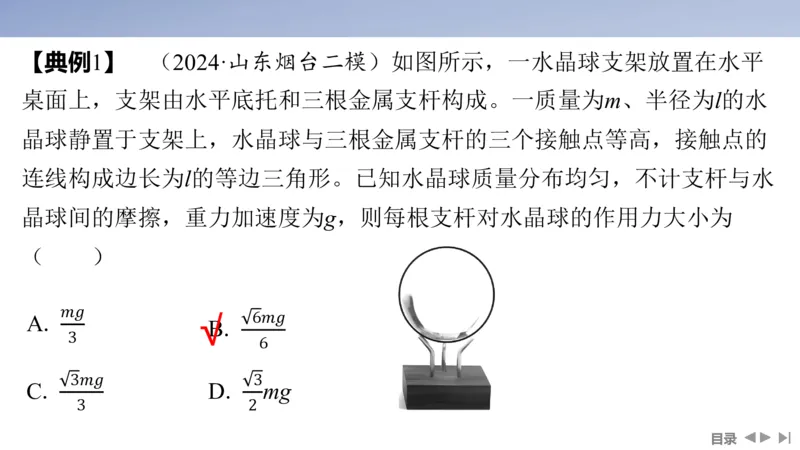
目录【典例1】
(
2024·
山东烟台二模)如图所示,一水晶球支架放置在水平
桌面上,支架由水平底托和三根金属支杆构成。一质量为 、半径为 的水
m l
晶球静置于支架上,水晶球与三根金属支杆的三个接触点等高,接触点的
连线构成边长为 的等边三角形。已知水晶球质量分布均匀,不计支杆与水
l
晶球间的摩擦,重力加速度为 ,则每根支杆对水晶球的作用力大小为
g
( )
.
A √.
B
6
3
6
. .
C D mg
3 3
3 2 目录解析:设支杆对水晶球的作用力与竖直方向的夹角为 ,根据几何关系有
θ
= = ,水晶球静止,根据平衡条件可得 = ,解得每根支
sin θ 3Fcos θ mg
3
3 3
3
杆对水晶球的作用力大小为 = ,故选 。
F B
6
6
目录【典例2】
(
2024·
四川雅安三模)小明运动后用网兜将篮球挂在相互垂
直的墙角。简化图如图所示,设篮球质量为 、半径为 ,悬挂点为互相垂
M R
直的两竖直墙壁交线处的 点, 到球心的距离为 ,一切摩擦不计,则篮
P P 2R
球对任一墙壁的压力大小为( )
A . Mg √B . Mg
2 2
4 2
. .
C Mg D Mg
3 6
3 6
目录解析:对球进行受力分析,球受重力 、绳子的拉力 及两个墙壁对它的
Mg T
支持力,两个支持力大小相等,夹角为 °,设支持力的大小为 、绳子
90 N
与竖直墙壁交线的夹角 ,根据几何知识可知球心到竖直墙壁交线的垂直
θ
距离为 = ,故 = = ,解得 = °,在竖直方向上根据受力
d R sin θ θ 45
2
平衡可得 = ,解得 = ,在水平方向上根据受力平衡可知两
Tcos θ Mg T Mg
2 2 2
个墙壁对球的支持力的合力大小等于绳子拉力 的水平分力的大小,即
T
2
+ = ,解得 = ,根据牛顿第三定律可得篮球对任一墙
Tsin θ N Mg
2
2 2
2
壁的压力大小为 , 正确。
Mg B
2
目录
2提升关键能力
目录1 2 3 4 5 6 7 8 9 10 11 12
. ( 浙江绍兴二模)如图所示,拖车的缆绳将违章车与拖车拴在一
1 2024·
起,使违章车停在倾斜坡道上保持静止状态,缆绳与倾斜坡道平行。下
列说法正确的是( )
√A . 缆绳对违章车的拉力等于违章车对缆绳的拉力
. 违章车对坡道的作用力的方向一定与坡道垂直
B
. 坡道与水平面的夹角越小,坡道受到的压力也越小
C
. 违章车只受到重力、支持力、拉力三个力的作用
D
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 根据牛顿第三定律可知,缆绳对违章车的拉力等于违章车对
缆绳的拉力, 正确;违章车对坡道的作用力可能是摩擦力和压力的合
A
力,这个合力与坡道不垂直;若违章车只受坡道的支持力,即违章车对
坡道只有压力,没有摩擦力,违章车对坡道的作用力的方向与坡道垂
直, 错误;设坡道与水平面的夹角为 ,则 = ,坡道与水平
B θ F mgcos θ
N
面的夹角越小,坡道受到的压力就会越大, 错误;违章车除了受到重
C
力、支持力、拉力作用之外还有可能受到坡道对它的摩擦力, 错误。
D
目录1 2 3 4 5 6 7 8 9 10 11 12
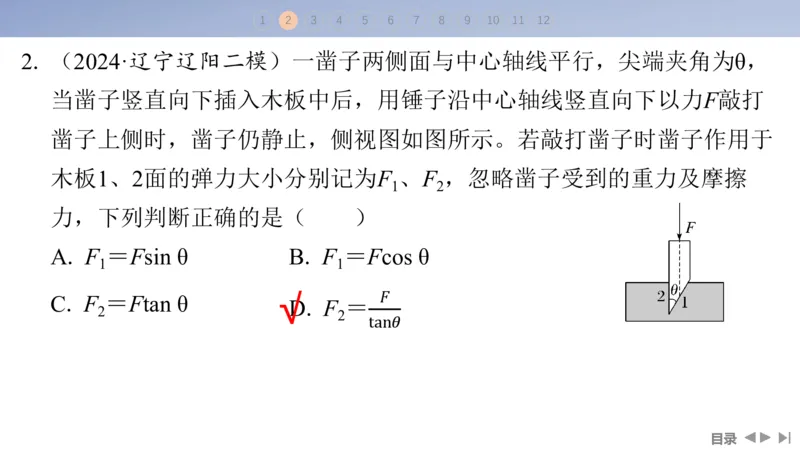
. ( 辽宁辽阳二模)一凿子两侧面与中心轴线平行,尖端夹角为 ,
2 2024· θ
当凿子竖直向下插入木板中后,用锤子沿中心轴线竖直向下以力 敲打
F
凿子上侧时,凿子仍静止,侧视图如图所示。若敲打凿子时凿子作用于
木板 、 面的弹力大小分别记为 、 ,忽略凿子受到的重力及摩擦
1 2 F F
1 2
力,下列判断正确的是( )
. = . =
A F Fsin θ B F Fcos θ
1 1
C . F = Ftan θ √ . =
D F
2
2
tan
目录1 2 3 4 5 6 7 8 9 10 11 12
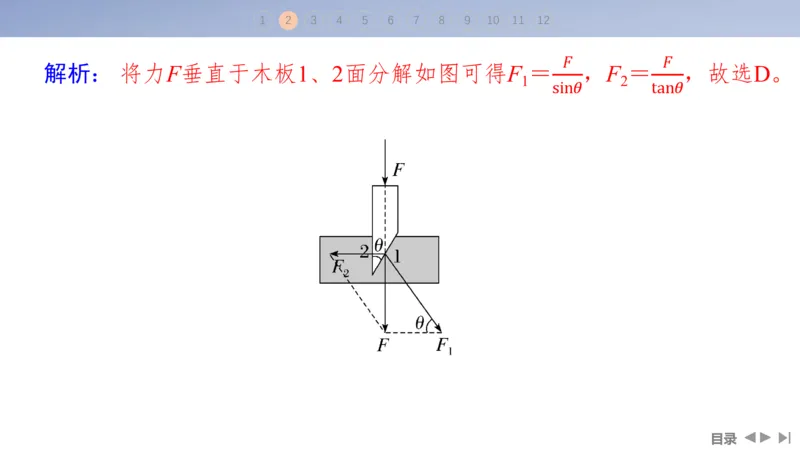
解析: 将力 垂直于木板 、 面分解如图可得 = , = ,故选 。
F 1 2 F F D
1 2
sin tan
目录1 2 3 4 5 6 7 8 9 10 11 12
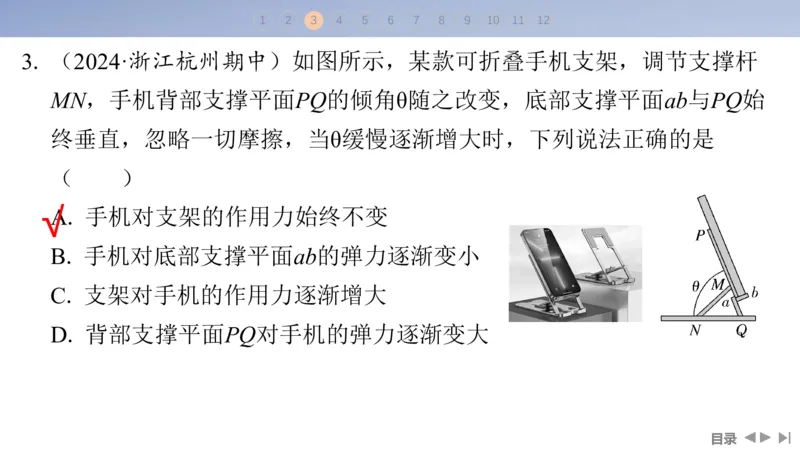
. ( 浙江杭州期中)如图所示,某款可折叠手机支架,调节支撑杆
3 2024·
,手机背部支撑平面 的倾角 随之改变,底部支撑平面 与 始
MN PQ θ ab PQ
终垂直,忽略一切摩擦,当 缓慢逐渐增大时,下列说法正确的是
θ
( )
√. 手机对支架的作用力始终不变
A
. 手机对底部支撑平面 的弹力逐渐变小
B ab
. 支架对手机的作用力逐渐增大
C
. 背部支撑平面 对手机的弹力逐渐变大
D PQ
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 由题意可知,支架对手机的作用力大小始终等于手机自身的
重力,根据牛顿第三定律可知,手机对支架的作用力等于支架对手机的
作用力,则手机对支架的作用力始终不变, 正确, 错误;根据手机
A C
的受力情况可知,手机的重力大小等于底部支撑平面 对手机的弹力与
ab
背部支撑平面 对手机的弹力的合力,当 角逐渐增大时,底部支撑平
PQ θ
面 对手机的弹力逐渐增大,背部支撑平面 对手机的弹力逐渐减
ab PQ
小,根据牛顿第三定律可知,手机对底部支撑平面 的弹力逐渐变大,
ab
、 错误。
B D
目录1 2 3 4 5 6 7 8 9 10 11 12
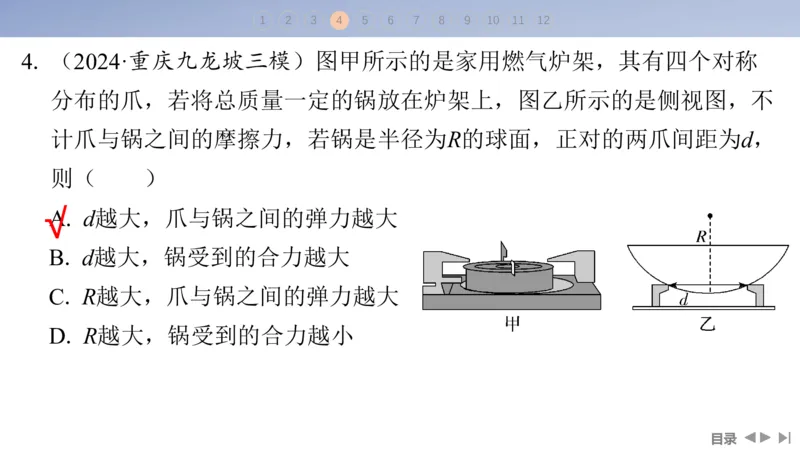
. ( 重庆九龙坡三模)图甲所示的是家用燃气炉架,其有四个对称
4 2024·
分布的爪,若将总质量一定的锅放在炉架上,图乙所示的是侧视图,不
计爪与锅之间的摩擦力,若锅是半径为 的球面,正对的两爪间距为 ,
R d
则( )
√. 越大,爪与锅之间的弹力越大
A d
. 越大,锅受到的合力越大
B d
. 越大,爪与锅之间的弹力越大
C R
. 越大,锅受到的合力越小
D R
目录1 2 3 4 5 6 7 8 9 10 11 12
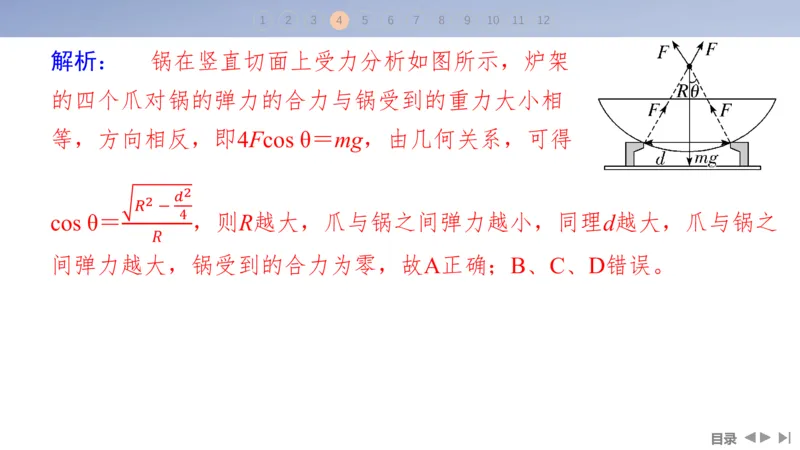
解析: 锅在竖直切面上受力分析如图所示,炉架
的四个爪对锅的弹力的合力与锅受到的重力大小相
等,方向相反,即 = ,由几何关系,可得
4Fcos θ mg
= ,则 越大,爪与锅之间弹力越小,同理 越大,爪与锅之
cos θ R d
2
2
−
4
间弹力越大,锅受到的合力为零,故 正确; 、 、 错误。
A B C D
目录1 2 3 4 5 6 7 8 9 10 11 12
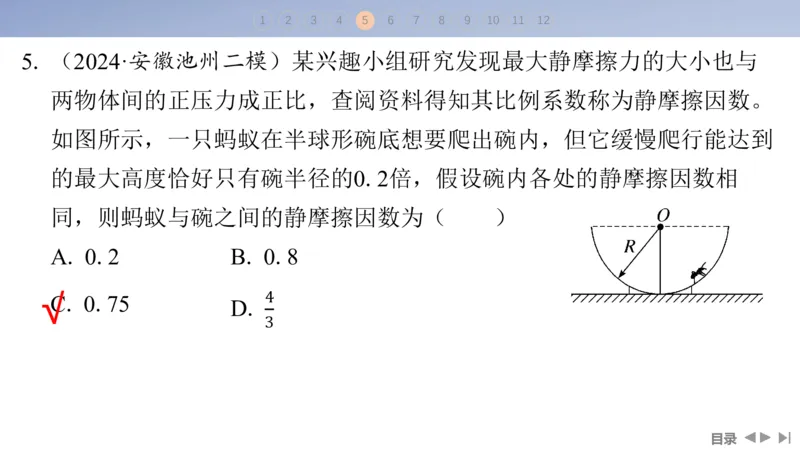
. ( 安徽池州二模)某兴趣小组研究发现最大静摩擦力的大小也与
5 2024·
两物体间的正压力成正比,查阅资料得知其比例系数称为静摩擦因数。
如图所示,一只蚂蚁在半球形碗底想要爬出碗内,但它缓慢爬行能达到
的最大高度恰好只有碗半径的 . 倍,假设碗内各处的静摩擦因数相
0 2
同,则蚂蚁与碗之间的静摩擦因数为( )
. . . .
A 0 2 B 0 8
√. .
C 0 75 .
D
4
3
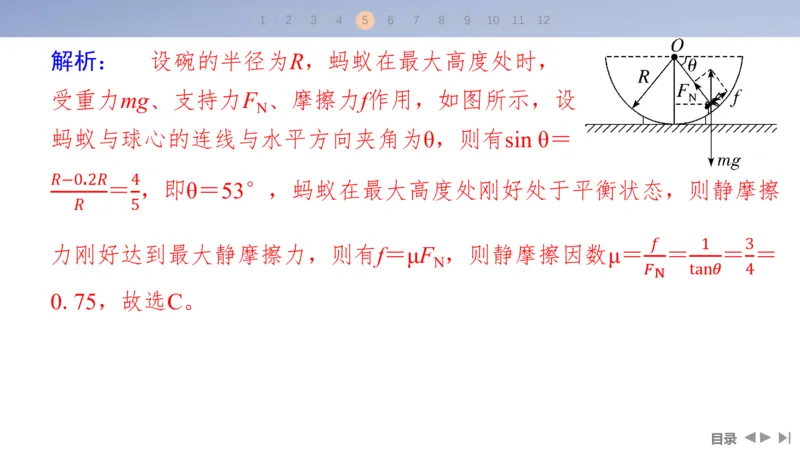
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 设碗的半径为 ,蚂蚁在最大高度处时,
R
受重力 、支持力 、摩擦力 作用,如图所示,设
mg F f
N
蚂蚁与球心的连线与水平方向夹角为 ,则有 =
θ sin θ
= ,即 = °,蚂蚁在最大高度处刚好处于平衡状态,则静摩擦
θ 53
−0 2 4
.
5
力刚好达到最大静摩擦力,则有 = ,则静摩擦因数 = = = =
f μF μ
N
1 3
. ,故选 。
0 75 C
N tan 4
目录1 2 3 4 5 6 7 8 9 10 11 12
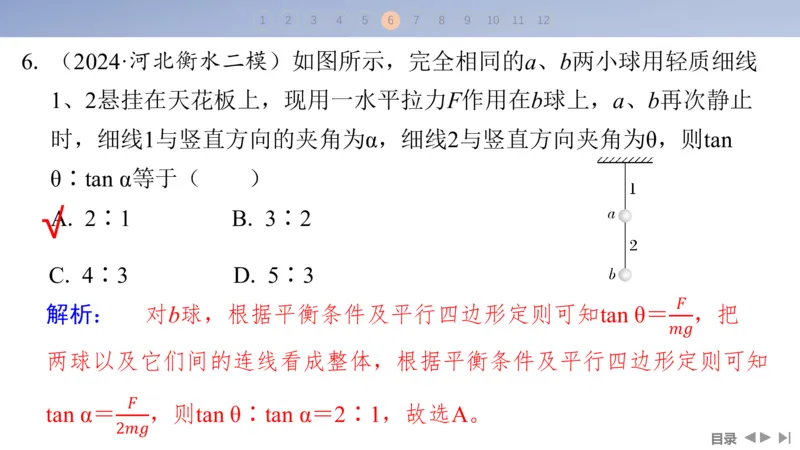
. ( 河北衡水二模)如图所示,完全相同的 、 两小球用轻质细线
6 2024· a b
、 悬挂在天花板上,现用一水平拉力 作用在 球上, 、 再次静止
1 2 F b a b
时,细线 与竖直方向的夹角为 ,细线 与竖直方向夹角为 ,则
1 α 2 θ tan
∶ 等于( )
θ tan α
√. ∶ . ∶
A 2 1 B 3 2
. ∶ . ∶
C 4 3 D 5 3
解析: 对 球,根据平衡条件及平行四边形定则可知 = ,把
b tan θ
两球以及它们间的连线看成整体,根据平衡条件及平行四边形定则可知
= ,则 ∶ = ∶ ,故选 。
tan α tan θ tan α 2 1 A
目录
2 1 2 3 4 5 6 7 8 9 10 11 12
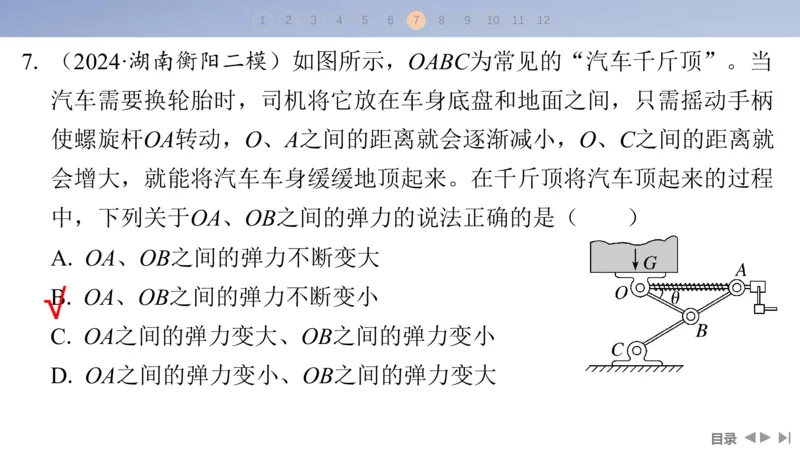
. ( 湖南衡阳二模)如图所示, 为常见的“汽车千斤顶”。当
7 2024· OABC
汽车需要换轮胎时,司机将它放在车身底盘和地面之间,只需摇动手柄
使螺旋杆 转动, 、 之间的距离就会逐渐减小, 、 之间的距离就
OA O A O C
会增大,就能将汽车车身缓缓地顶起来。在千斤顶将汽车顶起来的过程
中,下列关于 、 之间的弹力的说法正确的是( )
OA OB
. 、 之间的弹力不断变大
A OA OB
. 、 之间的弹力不断变小
√B OA OB
. 之间的弹力变大、 之间的弹力变小
C OA OB
. 之间的弹力变小、 之间的弹力变大
D OA OB
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 对 点进行受力分析,它受到竖直方向的汽车对它的压力,
O
大小等于汽车的重力 ; 方向杆的拉力 , 方向的弹力 ,
G OA F BO F OB
OA BO
与水平方向夹角为 ,可知 = , = ,当 变大时, 和
θ G F sin θ F θ F
BO OA BO
均变小。故选 。
F B
OA tan
目录1 2 3 4 5 6 7 8 9 10 11 12
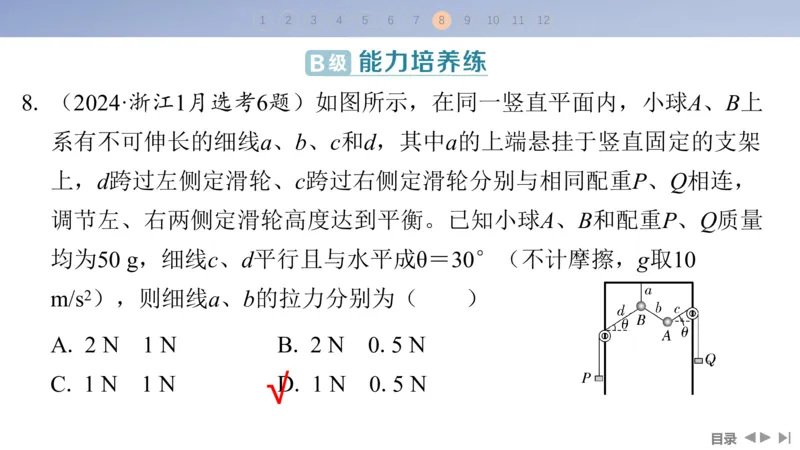
. ( 浙江 月选考 题)如图所示,在同一竖直平面内,小球 、 上
8 2024· 1 6 A B
系有不可伸长的细线 、 、 和 ,其中 的上端悬挂于竖直固定的支架
a b c d a
上, 跨过左侧定滑轮、 跨过右侧定滑轮分别与相同配重 、 相连,
d c P Q
调节左、右两侧定滑轮高度达到平衡。已知小球 、 和配重 、 质量
A B P Q
均为 ,细线 、 平行且与水平成 = °(不计摩擦, 取
50 g c d θ 30 g 10
),则细线 、 的拉力分别为( )
m/s2 a b
. . .
A 2 N 1 N B 2 N 0 5 N
C . 1 N 1 N √D . 1 N 0 . 5 N
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 由题意可知细线 对 的拉力和细线 对 的拉力大小相等、方
c A d B
向相反,对 、 整体分析可知细线 的拉力大小为 =( + ) =
A B a T m m g 1
a A B
,设细线 与水平方向夹角为 ,对 、 分析分别有 + =
N b α A B T sin α T sin θ
b c
, = ,解得 = . ,故选 。
m g T cos α T cos θ T 0 5 N D
A b d b
目录1 2 3 4 5 6 7 8 9 10 11 12
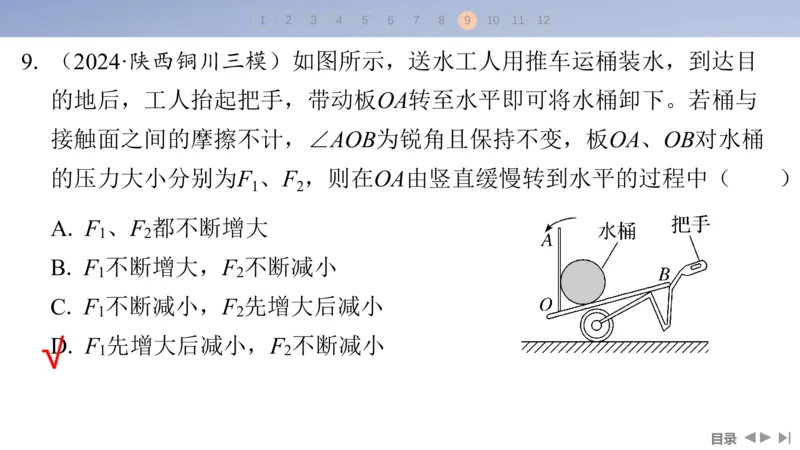
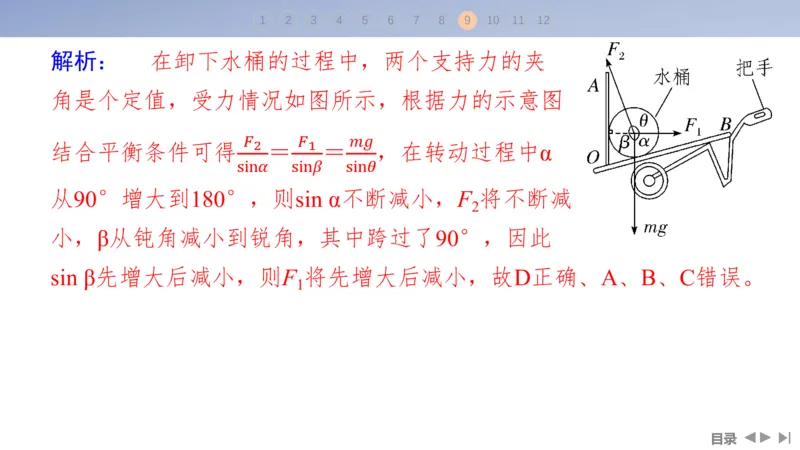
. ( 陕西铜川三模)如图所示,送水工人用推车运桶装水,到达目
9 2024·
的地后,工人抬起把手,带动板 转至水平即可将水桶卸下。若桶与
OA
接触面之间的摩擦不计,∠ 为锐角且保持不变,板 、 对水桶
AOB OA OB
的压力大小分别为 、 ,则在 由竖直缓慢转到水平的过程中( )
F F OA
1 2
. 、 都不断增大
A F F
1 2
. 不断增大, 不断减小
B F F
1 2
. 不断减小, 先增大后减小
C F F
1 2
. 先增大后减小, 不断减小
√D F F
1 2
目录1 2 3 4 5 6 7 8 9 10 11 12
解析: 在卸下水桶的过程中,两个支持力的夹
角是个定值,受力情况如图所示,根据力的示意图
结合平衡条件可得 = = ,在转动过程中
α
2 1
从 °增大到 °,则 不断减小, 将不断减
90 180 sin α F
sin sin sin
2
小, 从钝角减小到锐角,其中跨过了 °,因此
β 90
先增大后减小,则 将先增大后减小,故 正确、 、 、 错误。
sin β F D A B C
1
目录1 2 3 4 5 6 7 8 9 10 11 12
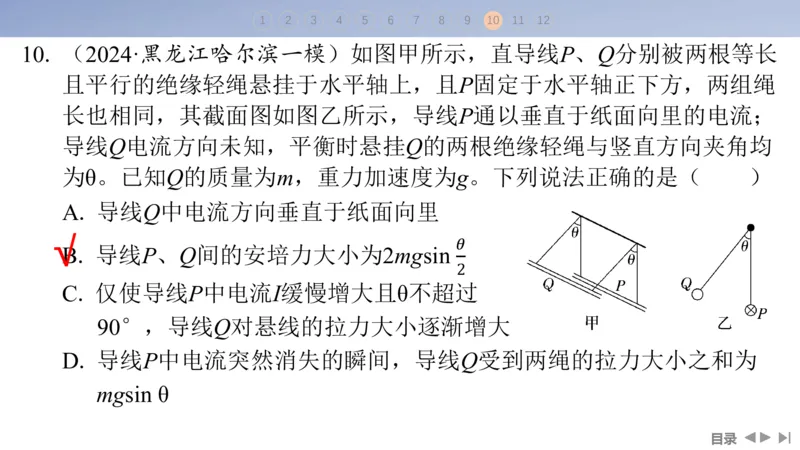
. ( 黑龙江哈尔滨一模)如图甲所示,直导线 、 分别被两根等长
10 2024· P Q
且平行的绝缘轻绳悬挂于水平轴上,且 固定于水平轴正下方,两组绳
P
长也相同,其截面图如图乙所示,导线 通以垂直于纸面向里的电流;
P
导线 电流方向未知,平衡时悬挂 的两根绝缘轻绳与竖直方向夹角均
Q Q
为 。已知 的质量为 ,重力加速度为 。下列说法正确的是( )
θ Q m g
. 导线 中电流方向垂直于纸面向里
A Q
√
. 导线 、 间的安培力大小为
B P Q 2mgsin
. 仅使导线 中电流 缓慢增大且 不超过
C P I θ
2
°,导线 对悬线的拉力大小逐渐增大
90 Q
. 导线 中电流突然消失的瞬间,导线 受到两绳的拉力大小之和为
D P Q
mgsin θ
目录1 2 3 4 5 6 7 8 9 10 11 12
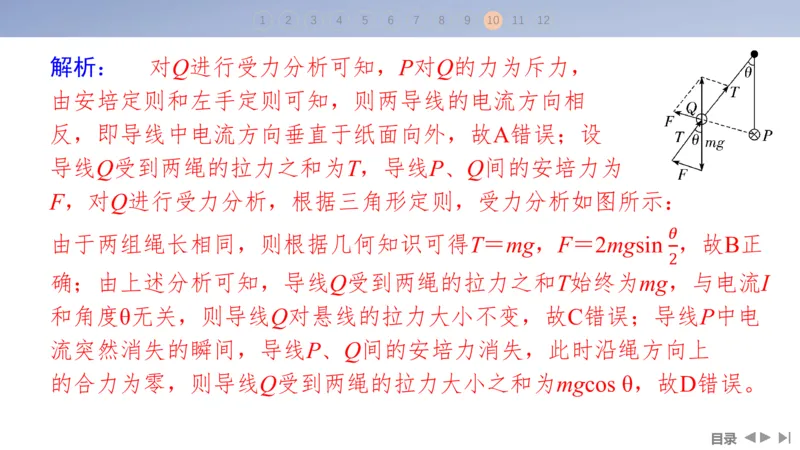
解析: 对 进行受力分析可知, 对 的力为斥力,
Q P Q
由安培定则和左手定则可知,则两导线的电流方向相
反,即导线中电流方向垂直于纸面向外,故 错误;设
A
导线 受到两绳的拉力之和为 ,导线 、 间的安培力为
Q T P Q
,对 进行受力分析,根据三角形定则,受力分析如图所示:
F Q
由于两组绳长相同,则根据几何知识可得 = , = ,故 正
T mg F 2mgsin B
确;由上述分析可知,导线 受到两绳的拉力之和 始终为 ,与电流
Q T mg I
2
和角度 无关,则导线 对悬线的拉力大小不变,故 错误;导线 中电
θ Q C P
流突然消失的瞬间,导线 、 间的安培力消失,此时沿绳方向上
P Q
的合力为零,则导线 受到两绳的拉力大小之和为 ,故 错误。
Q mgcos θ D
目录1 2 3 4 5 6 7 8 9 10 11 12
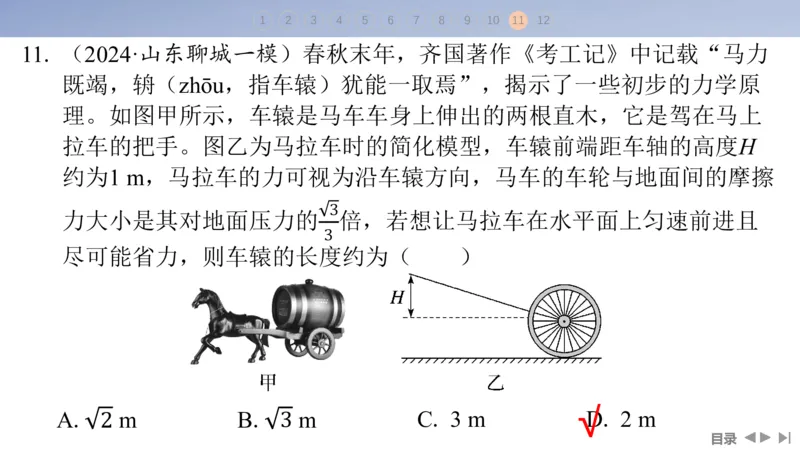
. ( 山东聊城一模)春秋末年,齐国著作《考工记》中记载“马力
11 2024·
既竭,辀( ,指车辕)犹能一取焉”,揭示了一些初步的力学原
zhōu
理。如图甲所示,车辕是马车车身上伸出的两根直木,它是驾在马上
拉车的把手。图乙为马拉车时的简化模型,车辕前端距车轴的高度
H
约为 ,马拉车的力可视为沿车辕方向,马车的车轮与地面间的摩擦
1 m
力大小是其对地面压力的 倍,若想让马拉车在水平面上匀速前进且
3
尽可能省力,则车辕的长度约为( )
3
. . . √.
A m B m C 3 m D 2 m
目录
2 31 2 3 4 5 6 7 8 9 10 11 12
解析: 设车辕与水平方向夹角为 ,则当车匀速前进时, =
θ Fcos θ k
( - ),解得 = ,而 + = ( °+
mg Fsin θ F cos θ ksin θ sin 60
+
2
cos sin 3
),则当 = °时 最小,即此时车辕的长度约为 = = ,
θ θ 30 F l 2H
°
故选 。
D
sin30
目录1 2 3 4 5 6 7 8 9 10 11 12
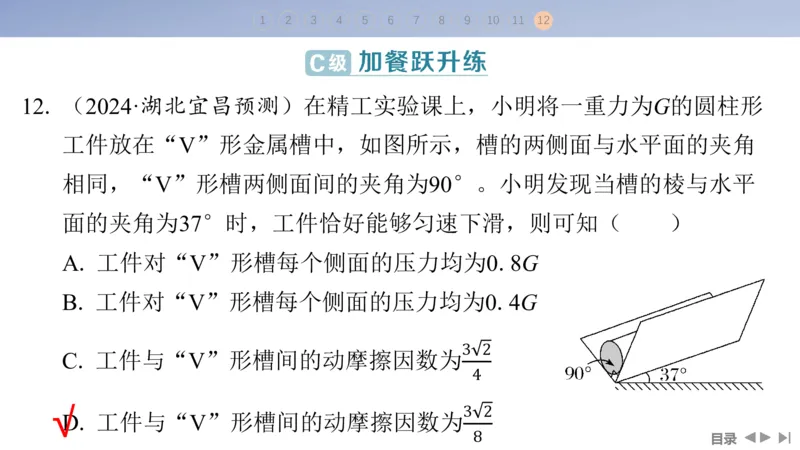
. ( 湖北宜昌预测)在精工实验课上,小明将一重力为 的圆柱形
12 2024· G
工件放在“ ”形金属槽中,如图所示,槽的两侧面与水平面的夹角
V
相同,“ ”形槽两侧面间的夹角为 °。小明发现当槽的棱与水平
V 90
面的夹角为 °时,工件恰好能够匀速下滑,则可知( )
37
. 工件对“ ”形槽每个侧面的压力均为 .
A V 0 8G
. 工件对“ ”形槽每个侧面的压力均为 .
B V 0 4G
. 工件与“ ”形槽间的动摩擦因数为
C V
3 2
√ 4
. 工件与“ ”形槽间的动摩擦因数为
D V
目录
3 2
81 2 3 4 5 6 7 8 9 10 11 12
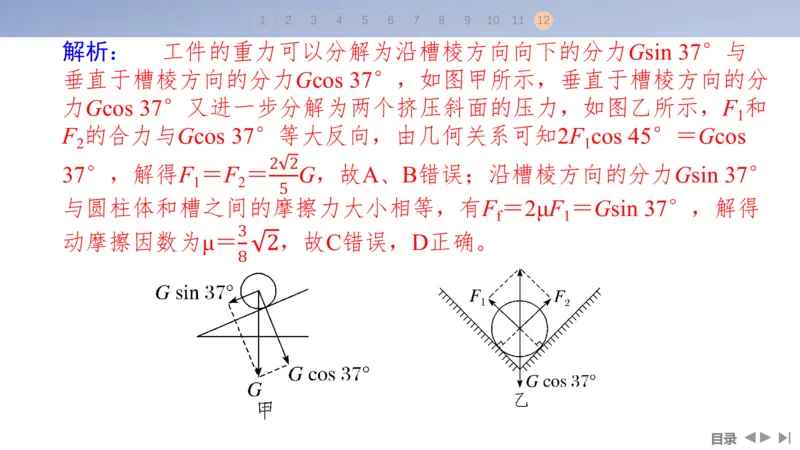
解析: 工件的重力可以分解为沿槽棱方向向下的分力 °与
Gsin 37
垂直于槽棱方向的分力 °,如图甲所示,垂直于槽棱方向的分
Gcos 37
力 °又进一步分解为两个挤压斜面的压力,如图乙所示, 和
Gcos 37 F
1
的合力与 °等大反向,由几何关系可知 °=
F Gcos 37 2F cos 45 Gcos
2 1
°,解得 = = ,故 、 错误;沿槽棱方向的分力 °
37 F F G A B Gsin 37
1 2
2 2
与圆柱体和槽之间的摩擦力大小相等,有 = = °,解得
F 2μF Gsin 37
f 1
5
动摩擦因数为 = ,故 错误, 正确。
μ C D
3
8 2
目录

