
文档内容
第 11 讲 用图像处理实验数据和误差分析之牛顿第二定律相关实
验
1.(2022·山东)在天宫课堂中,我国航天员演示了利用牛顿第二定律测量物体质量的实验,受此
启发,某同学利用气垫导轨、力传感器、无线加速度传感器、轻弹簧和待测物体等器材设计了
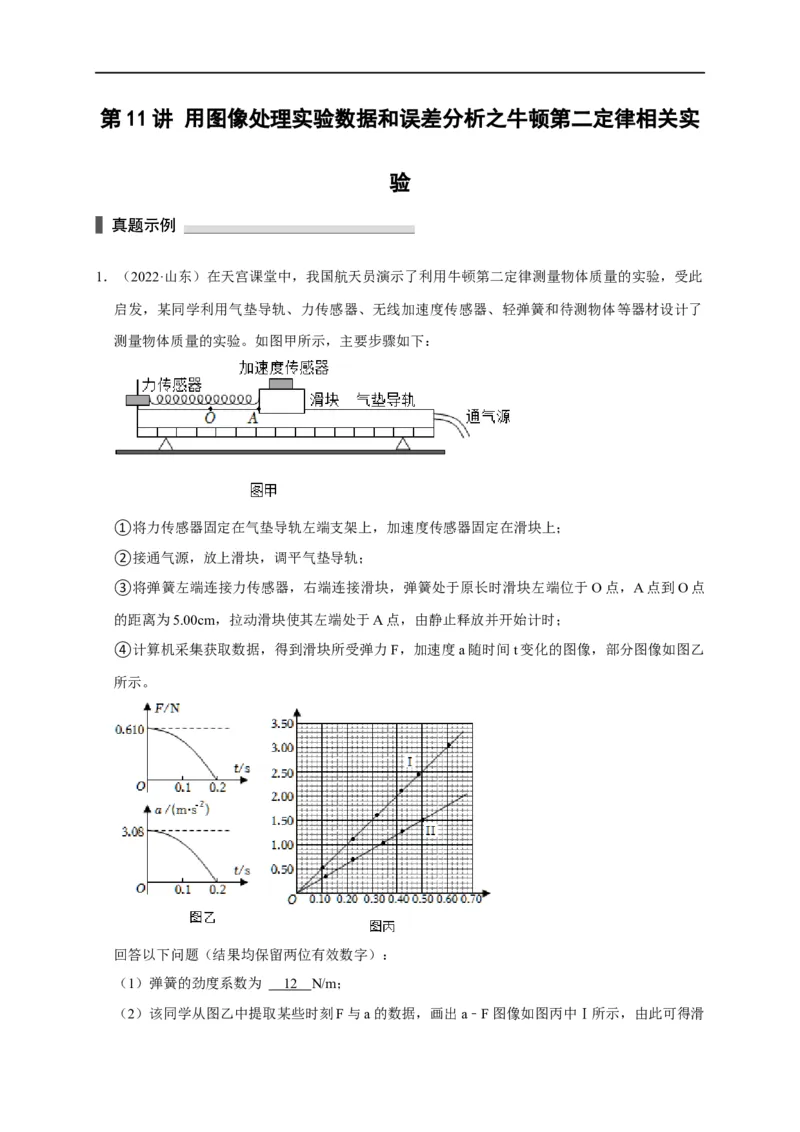
测量物体质量的实验。如图甲所示,主要步骤如下:
①将力传感器固定在气垫导轨左端支架上,加速度传感器固定在滑块上;
②接通气源,放上滑块,调平气垫导轨;
③将弹簧左端连接力传感器,右端连接滑块,弹簧处于原长时滑块左端位于O点,A点到O点
的距离为5.00cm,拉动滑块使其左端处于A点,由静止释放并开始计时;
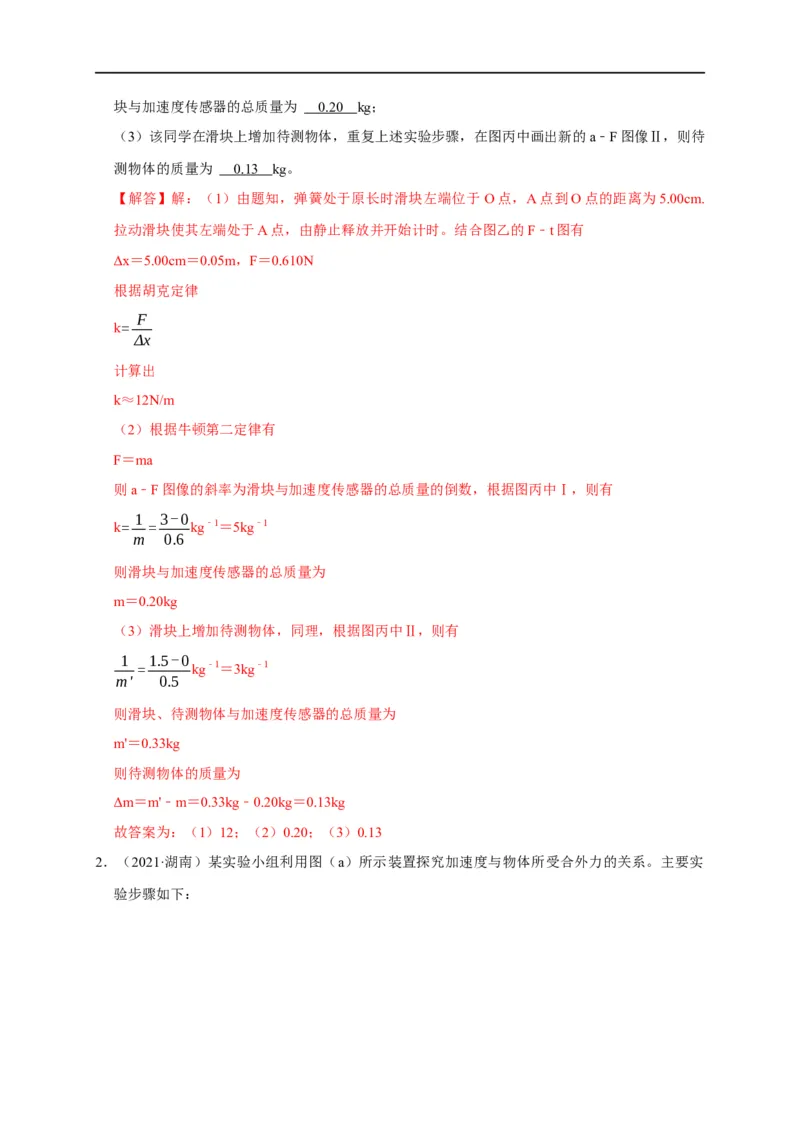
④计算机采集获取数据,得到滑块所受弹力F,加速度a随时间t变化的图像,部分图像如图乙
所示。
回答以下问题(结果均保留两位有效数字):
(1)弹簧的劲度系数为 1 2 N/m;
(2)该同学从图乙中提取某些时刻F与a的数据,画出a﹣F图像如图丙中Ⅰ所示,由此可得滑块与加速度传感器的总质量为 0.2 0 kg;
(3)该同学在滑块上增加待测物体,重复上述实验步骤,在图丙中画出新的a﹣F图像Ⅱ,则待
测物体的质量为 0.1 3 kg。
【解答】解:(1)由题知,弹簧处于原长时滑块左端位于O点,A点到O点的距离为5.00cm.
拉动滑块使其左端处于A点,由静止释放并开始计时。结合图乙的F﹣t图有
Δx=5.00cm=0.05m,F=0.610N
根据胡克定律
F
k=
Δx
计算出
k≈12N/m
(2)根据牛顿第二定律有
F=ma
则a﹣F图像的斜率为滑块与加速度传感器的总质量的倒数,根据图丙中Ⅰ,则有
1 3-0
k= = kg﹣1=5kg﹣1
m 0.6
则滑块与加速度传感器的总质量为
m=0.20kg
(3)滑块上增加待测物体,同理,根据图丙中Ⅱ,则有
1 1.5-0
= kg﹣1=3kg﹣1
m' 0.5
则滑块、待测物体与加速度传感器的总质量为
m'=0.33kg
则待测物体的质量为
Δm=m'﹣m=0.33kg﹣0.20kg=0.13kg
故答案为:(1)12;(2)0.20;(3)0.13
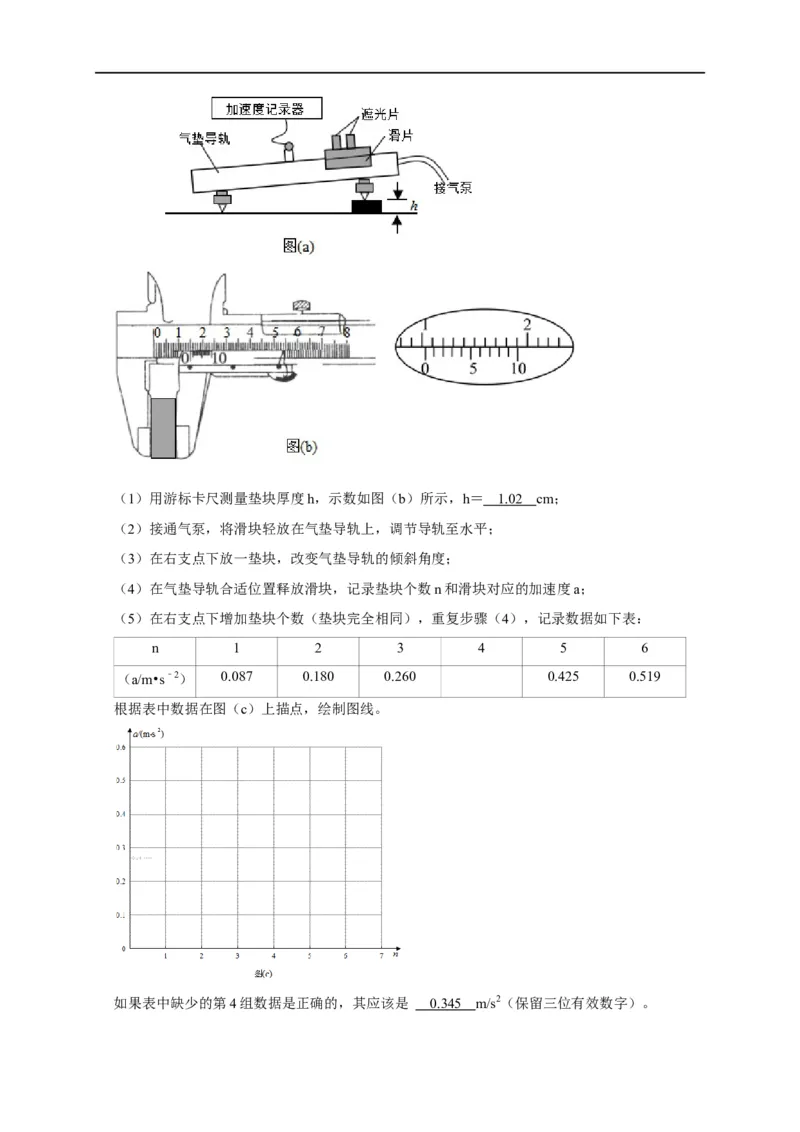
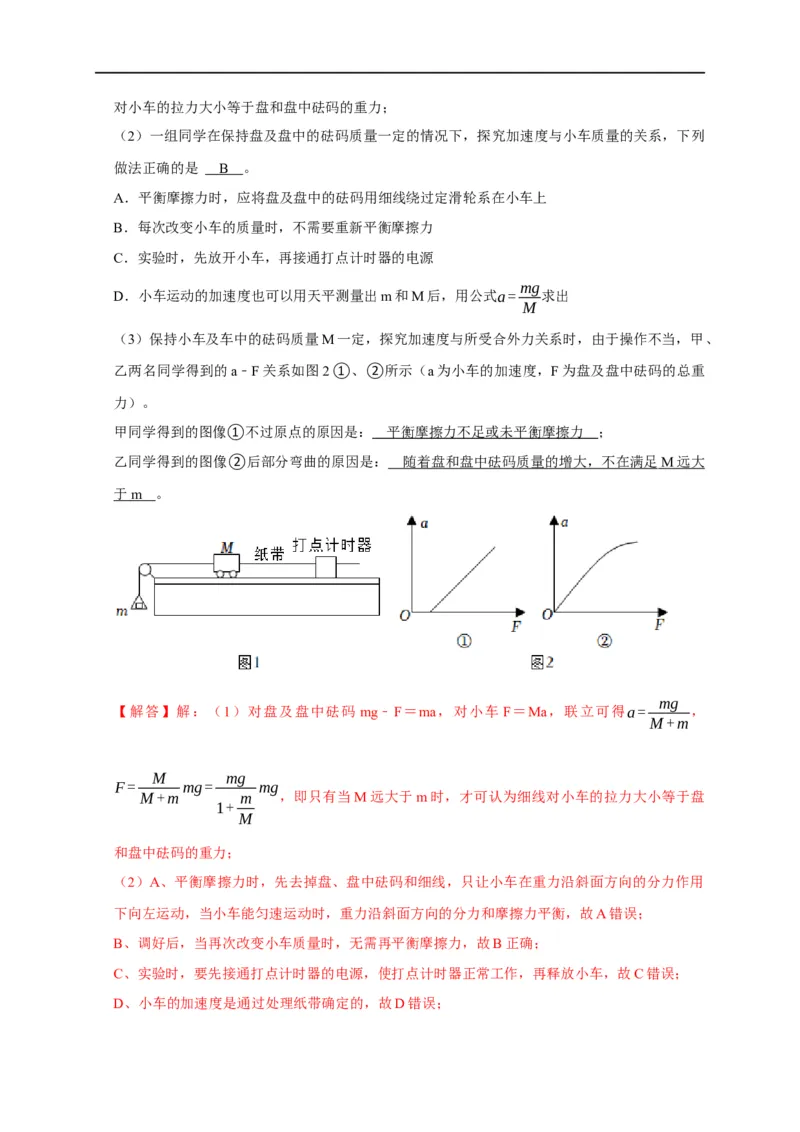
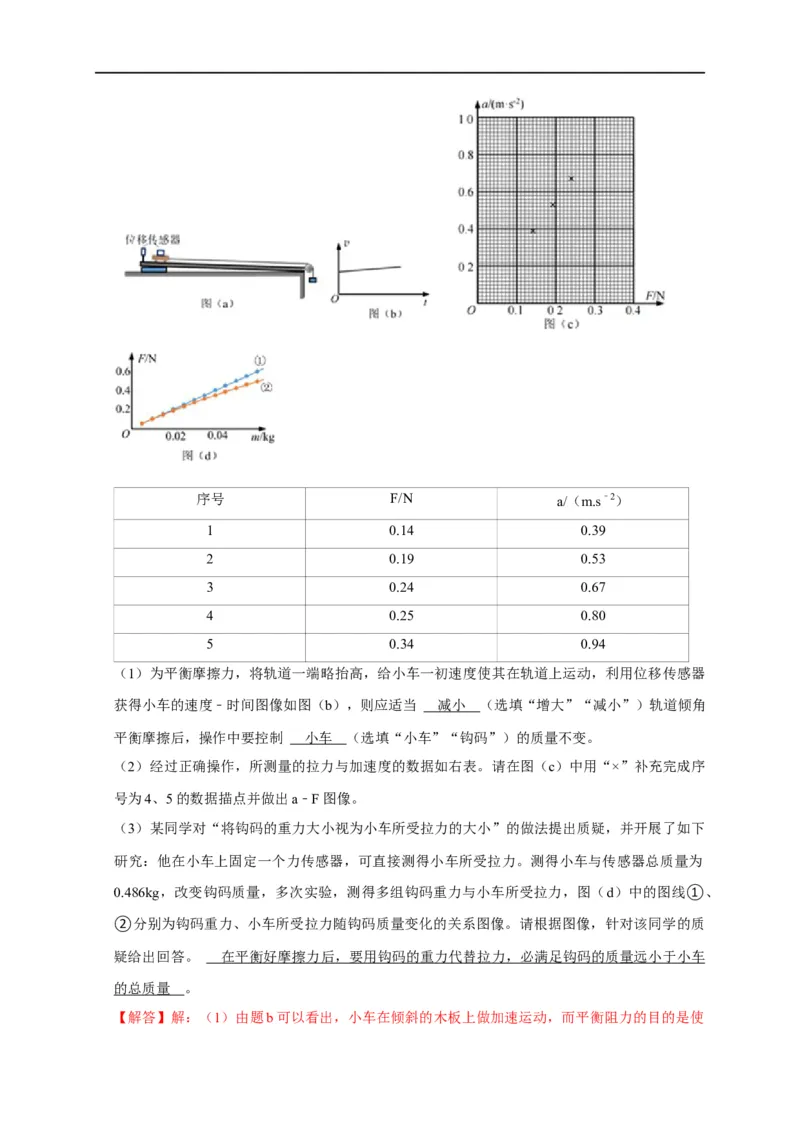
2.(2021·湖南)某实验小组利用图(a)所示装置探究加速度与物体所受合外力的关系。主要实
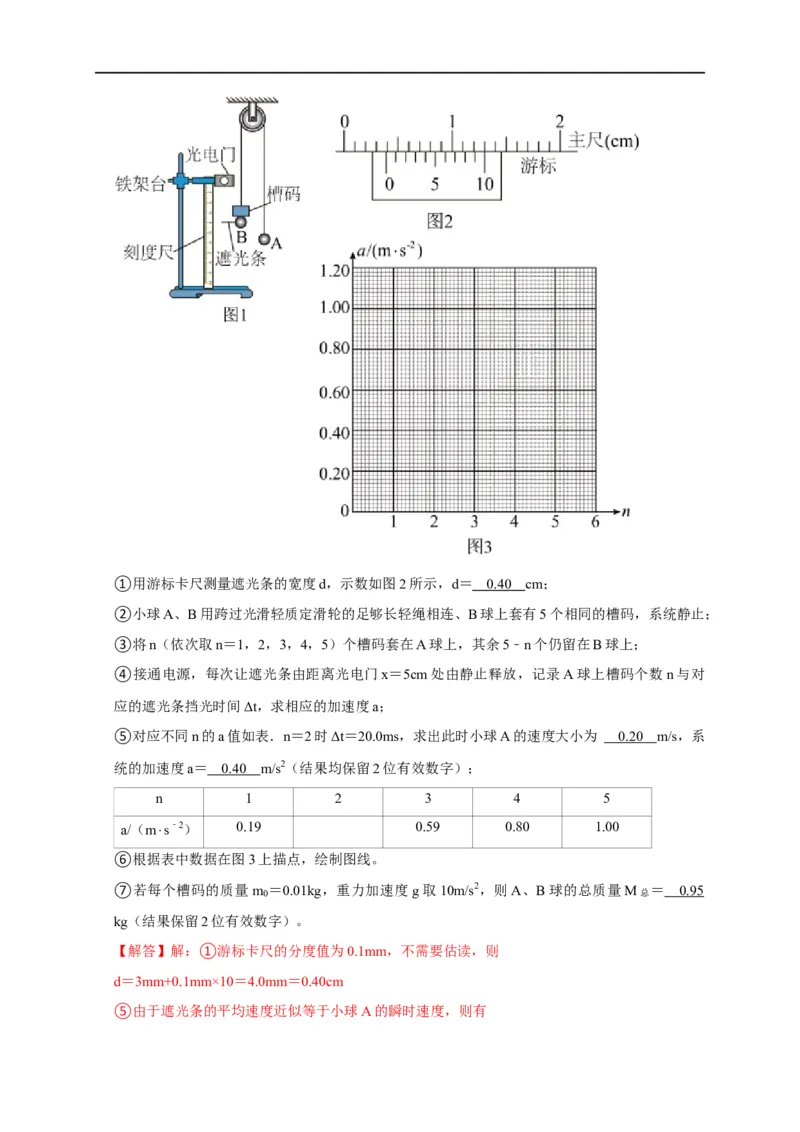
验步骤如下:(1)用游标卡尺测量垫块厚度h,示数如图(b)所示,h= 1.0 2 cm;
(2)接通气泵,将滑块轻放在气垫导轨上,调节导轨至水平;
(3)在右支点下放一垫块,改变气垫导轨的倾斜角度;
(4)在气垫导轨合适位置释放滑块,记录垫块个数n和滑块对应的加速度a;
(5)在右支点下增加垫块个数(垫块完全相同),重复步骤(4),记录数据如下表:
n 1 2 3 4 5 6
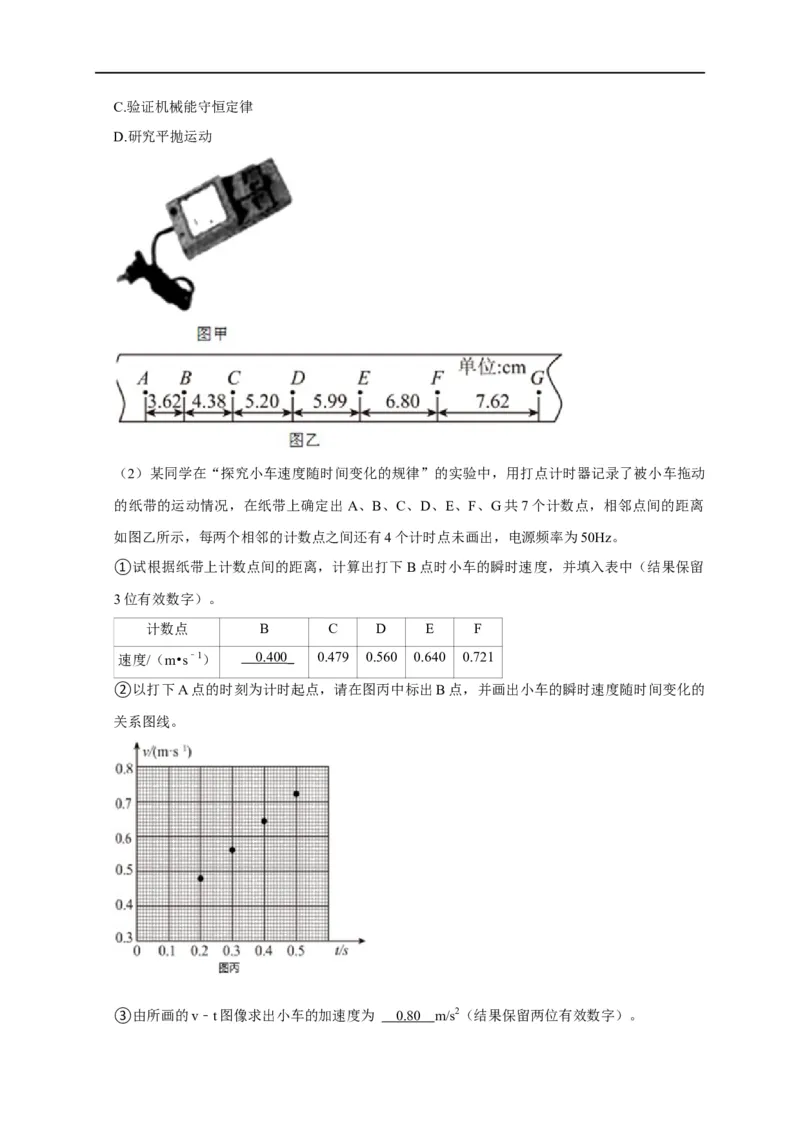
(a/m•s﹣2) 0.087 0.180 0.260 0.425 0.519
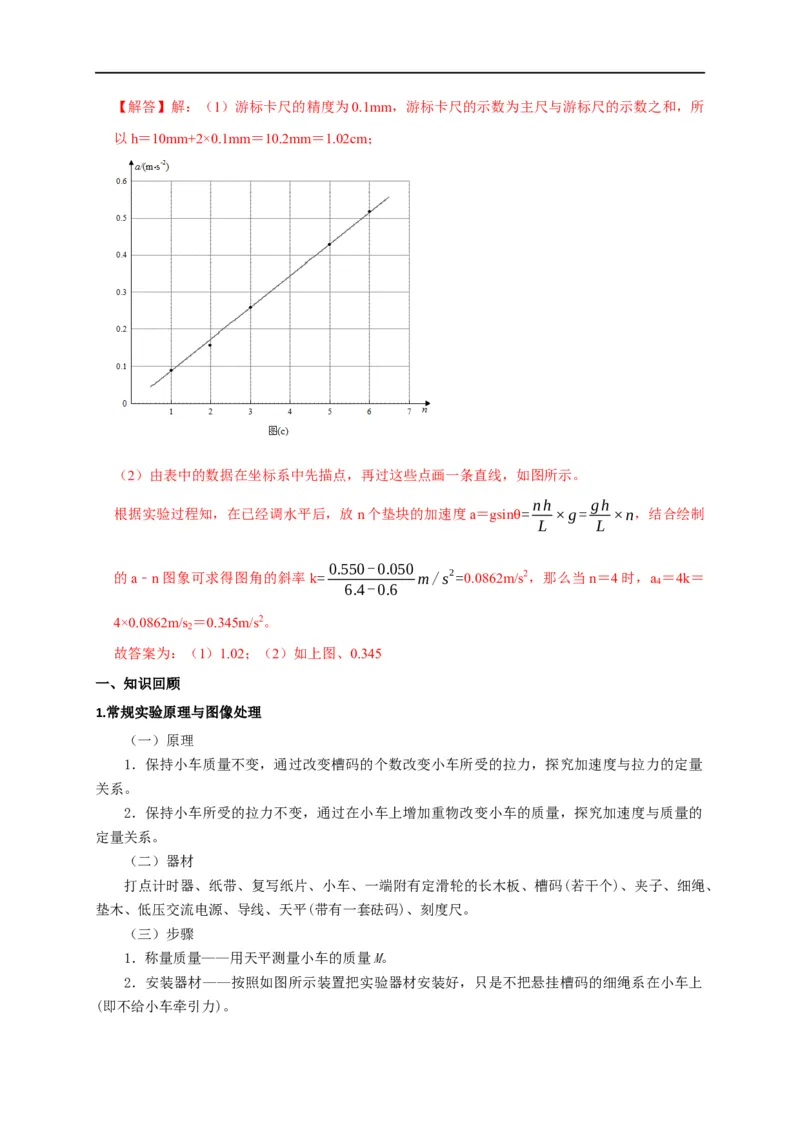
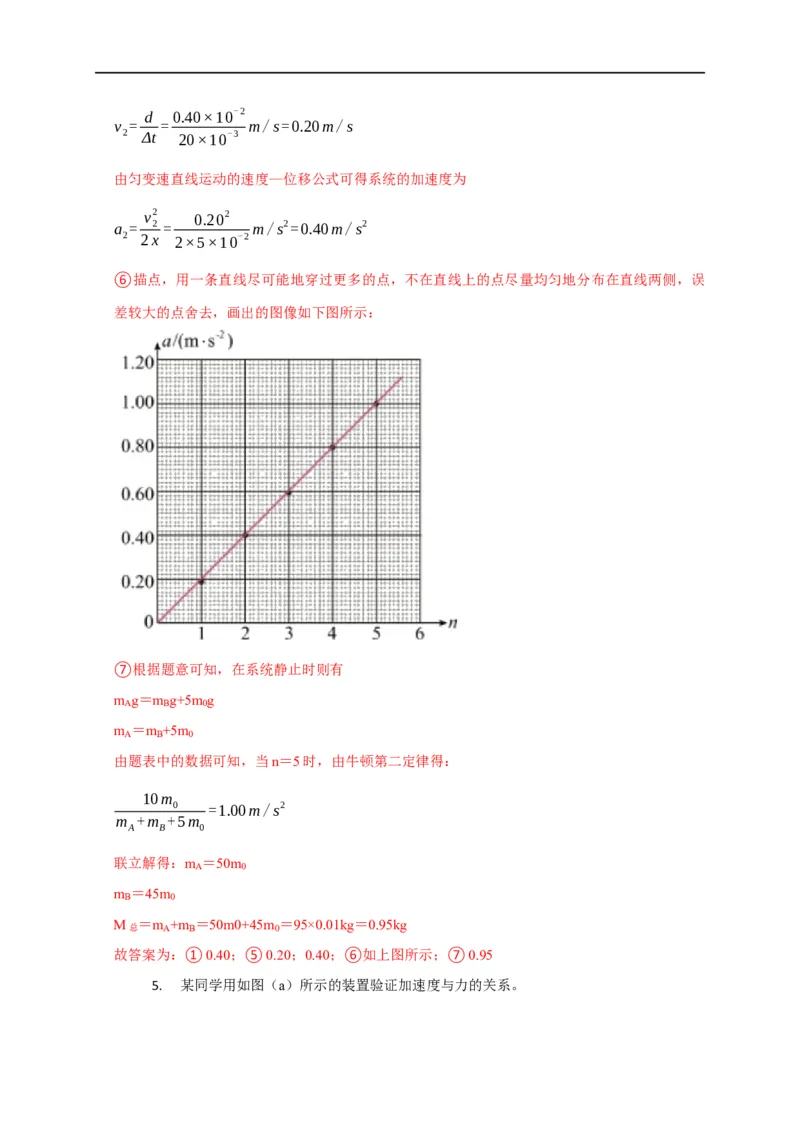
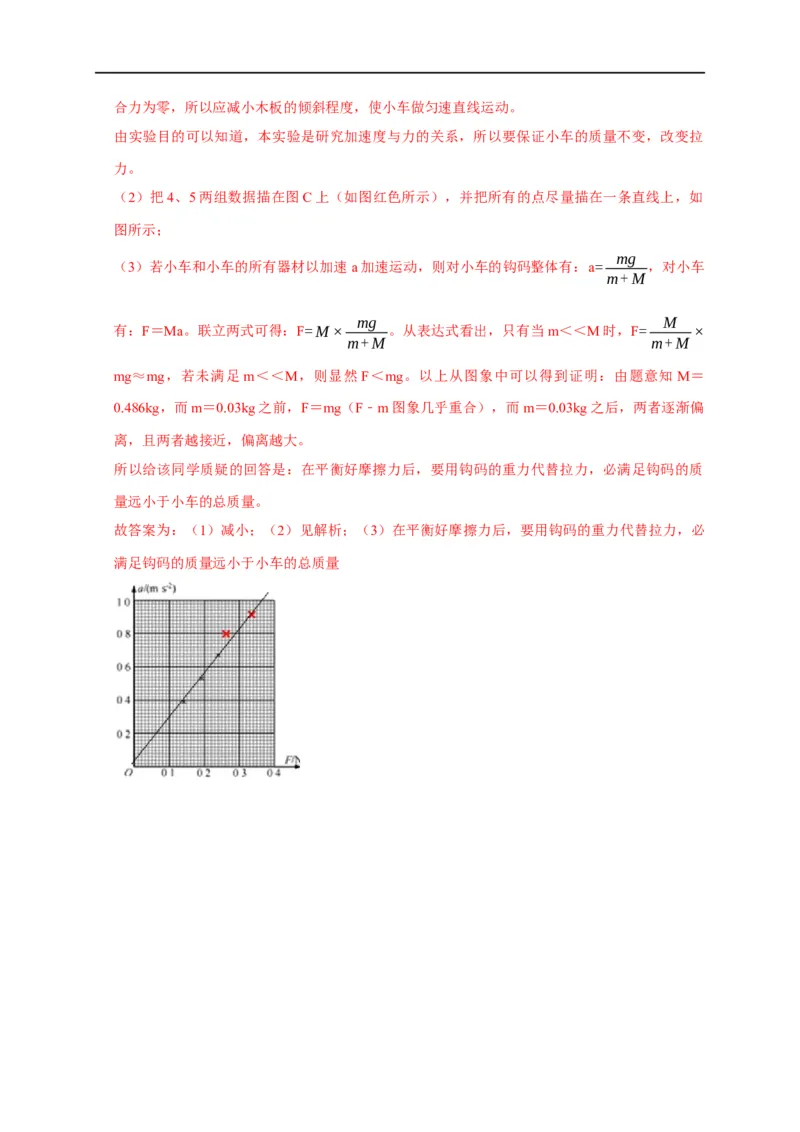
根据表中数据在图(c)上描点,绘制图线。
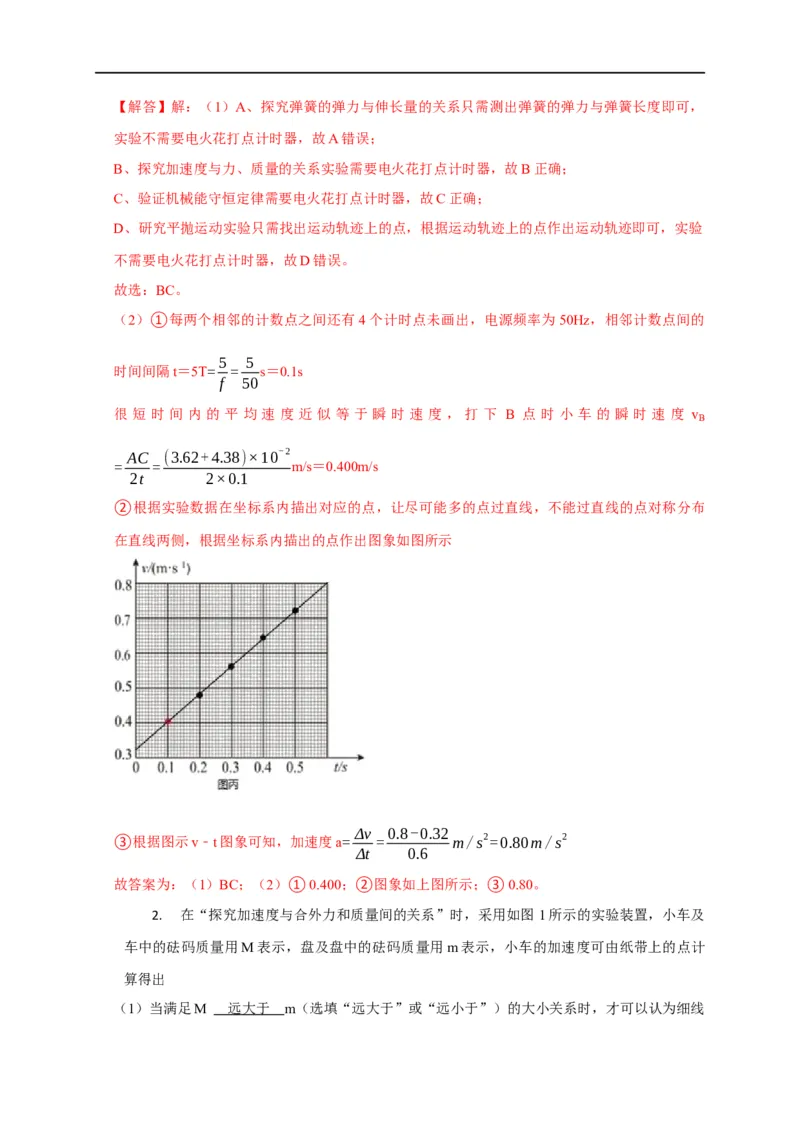
如果表中缺少的第4组数据是正确的,其应该是 0.34 5 m/s2(保留三位有效数字)。【解答】解:(1)游标卡尺的精度为0.1mm,游标卡尺的示数为主尺与游标尺的示数之和,所
以h=10mm+2×0.1mm=10.2mm=1.02cm;
(2)由表中的数据在坐标系中先描点,再过这些点画一条直线,如图所示。
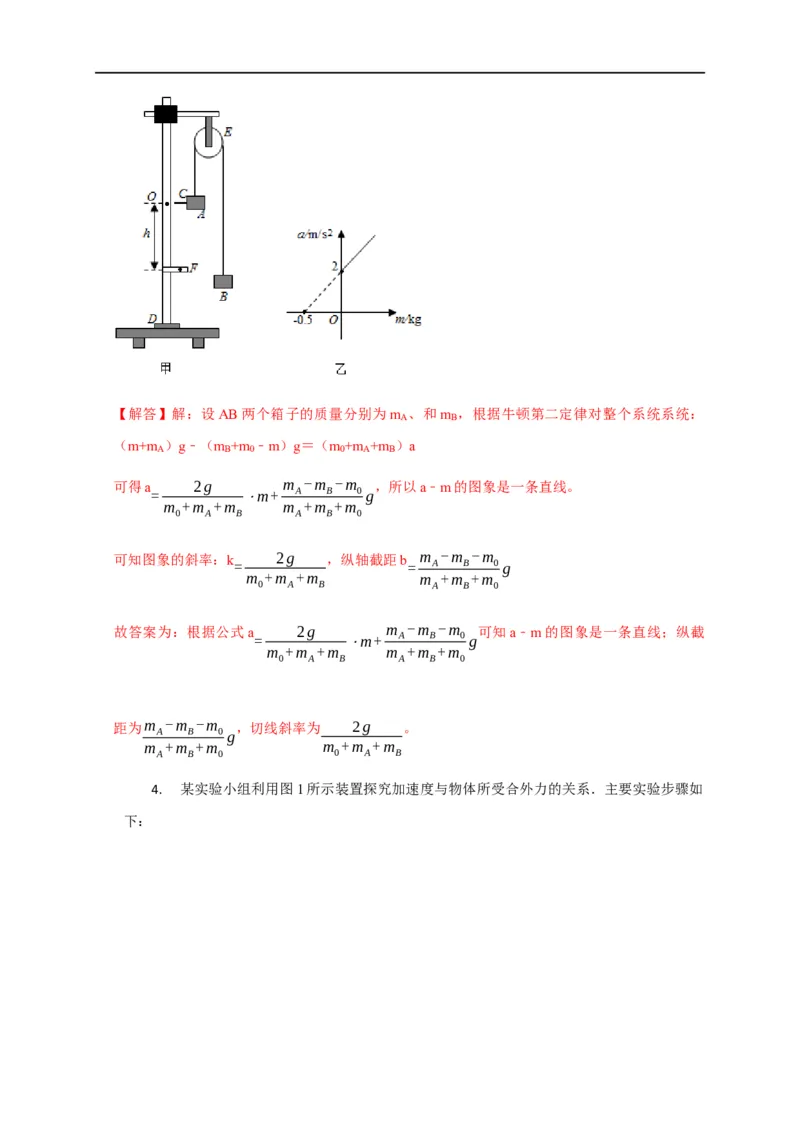
nh gh
根据实验过程知,在已经调水平后,放n个垫块的加速度a=gsin = ×g= ×n,结合绘制
L L
θ
0.550-0.050
的a﹣n图象可求得图角的斜率k= m/s2=0.0862m/s2,那么当n=4时,a =4k=
4
6.4-0.6
4×0.0862m/s =0.345m/s2。
2
故答案为:(1)1.02;(2)如上图、0.345
一、知识回顾
1.常规实验原理与图像处理
(一)原理
1.保持小车质量不变,通过改变槽码的个数改变小车所受的拉力,探究加速度与拉力的定量
关系。
2.保持小车所受的拉力不变,通过在小车上增加重物改变小车的质量,探究加速度与质量的
定量关系。
(二)器材
打点计时器、纸带、复写纸片、小车、一端附有定滑轮的长木板、槽码(若干个)、夹子、细绳、
垫木、低压交流电源、导线、天平(带有一套砝码)、刻度尺。
(三)步骤
1.称量质量——用天平测量小车的质量M。
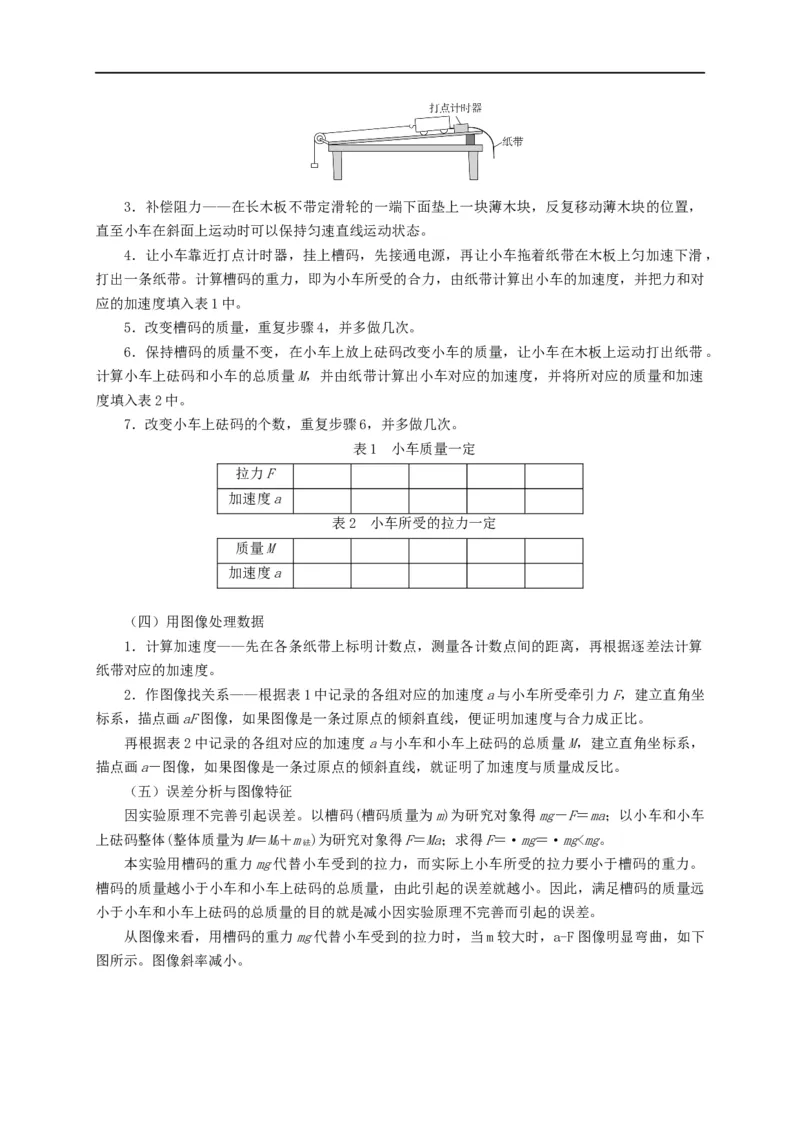
2.安装器材——按照如图所示装置把实验器材安装好,只是不把悬挂槽码的细绳系在小车上
(即不给小车牵引力)。3.补偿阻力——在长木板不带定滑轮的一端下面垫上一块薄木块,反复移动薄木块的位置,
直至小车在斜面上运动时可以保持匀速直线运动状态。
4.让小车靠近打点计时器,挂上槽码,先接通电源,再让小车拖着纸带在木板上匀加速下滑,
打出一条纸带。计算槽码的重力,即为小车所受的合力,由纸带计算出小车的加速度,并把力和对
应的加速度填入表1中。
5.改变槽码的质量,重复步骤4,并多做几次。
6.保持槽码的质量不变,在小车上放上砝码改变小车的质量,让小车在木板上运动打出纸带。
计算小车上砝码和小车的总质量M,并由纸带计算出小车对应的加速度,并将所对应的质量和加速
度填入表2中。
7.改变小车上砝码的个数,重复步骤6,并多做几次。
表1 小车质量一定
拉力F
加速度a
表2 小车所受的拉力一定
质量M
加速度a
(四)用图像处理数据
1.计算加速度——先在各条纸带上标明计数点,测量各计数点间的距离,再根据逐差法计算
纸带对应的加速度。
2.作图像找关系——根据表1中记录的各组对应的加速度a与小车所受牵引力F,建立直角坐
标系,描点画aF图像,如果图像是一条过原点的倾斜直线,便证明加速度与合力成正比。
再根据表2中记录的各组对应的加速度a与小车和小车上砝码的总质量M,建立直角坐标系,
描点画a-图像,如果图像是一条过原点的倾斜直线,就证明了加速度与质量成反比。
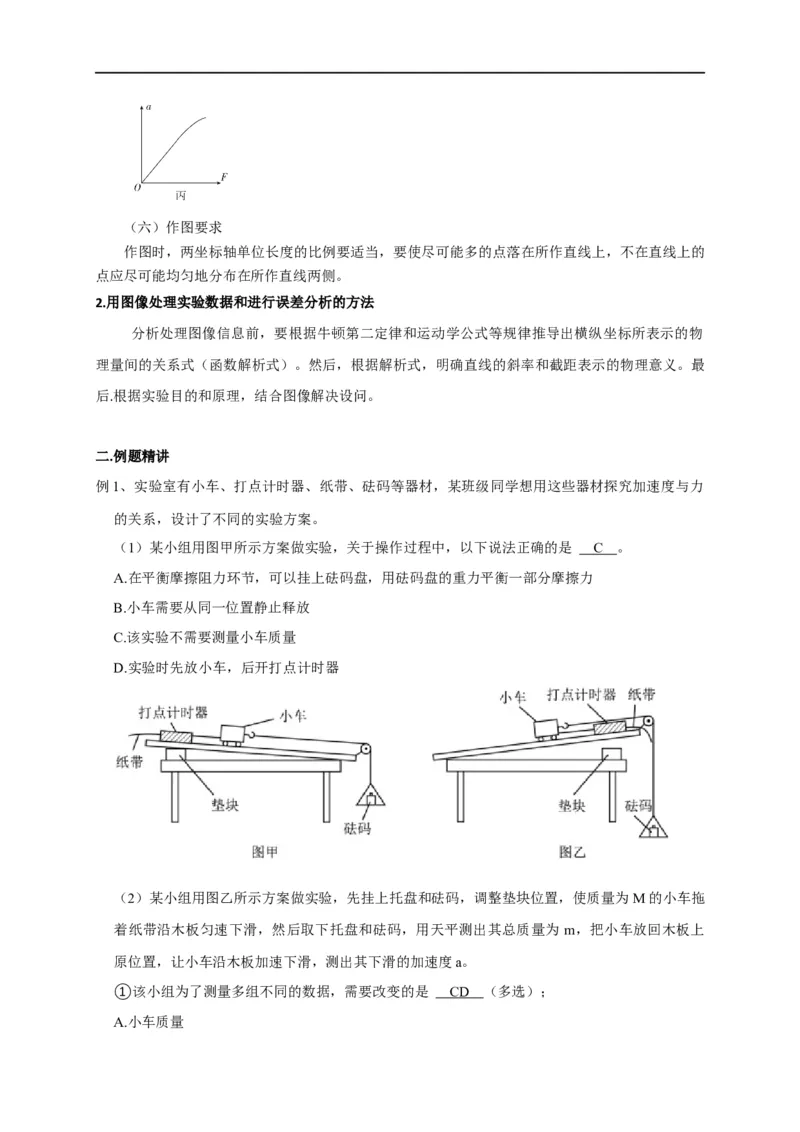
(五)误差分析与图像特征
因实验原理不完善引起误差。以槽码(槽码质量为m)为研究对象得mg-F=ma;以小车和小车
上砝码整体(整体质量为M=M+m )为研究对象得F=Ma;求得F=·mg=·mg
