
文档内容
第 31 讲 与摩擦力做功及摩擦热相关的 6 种题型
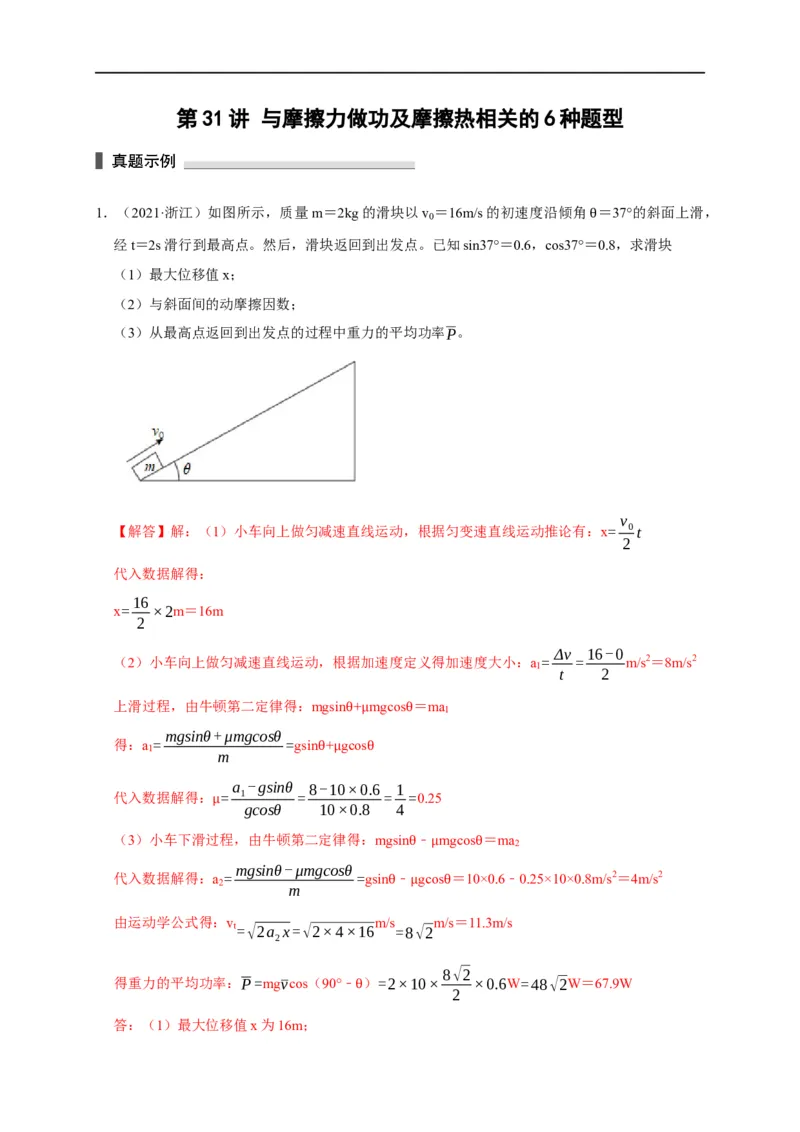
1.(2021·浙江)如图所示,质量m=2kg的滑块以v =16m/s的初速度沿倾角 =37°的斜面上滑,
0
经t=2s滑行到最高点。然后,滑块返回到出发点。已知sin37°=0.6,cos37°=θ0.8,求滑块
(1)最大位移值x;
(2)与斜面间的动摩擦因数;
(3)从最高点返回到出发点的过程中重力的平均功率P。
v
【解答】解:(1)小车向上做匀减速直线运动,根据匀变速直线运动推论有:x= 0t
2
代入数据解得:
16
x= ×2m=16m
2
Δv 16-0
(2)小车向上做匀减速直线运动,根据加速度定义得加速度大小:a = = m/s2=8m/s2
1
t 2
上滑过程,由牛顿第二定律得:mgsin + mgcos =ma
1
mgsinθ+μmgcosθ θ μ θ
得:a = =gsin + gcos
1
m
θ μ θ
a -gsinθ 8-10×0.6 1
代入数据解得: = 1 = = =0.25
gcosθ 10×0.8 4
μ
(3)小车下滑过程,由牛顿第二定律得:mgsin ﹣ mgcos =ma
2
mgsinθ-μmgcosθ θ μ θ
代入数据解得:a = =gsin ﹣ gcos =10×0.6﹣0.25×10×0.8m/s2=4m/s2
2
m
θ μ θ
由运动学公式得:v m/s m/s=11.3m/s
t=√2a x=√2×4×16 =8√2
2
8√2
得重力的平均功率:P=mgvcos(90°﹣ )=2×10× ×0.6W=48√2W=67.9W
2
θ
答:(1)最大位移值x为16m;(2)与斜面间的动摩擦因数为0.25;
(3)从最高点返回到出发点的过程中重力的平均功率P为67.9W。
一.知识回顾
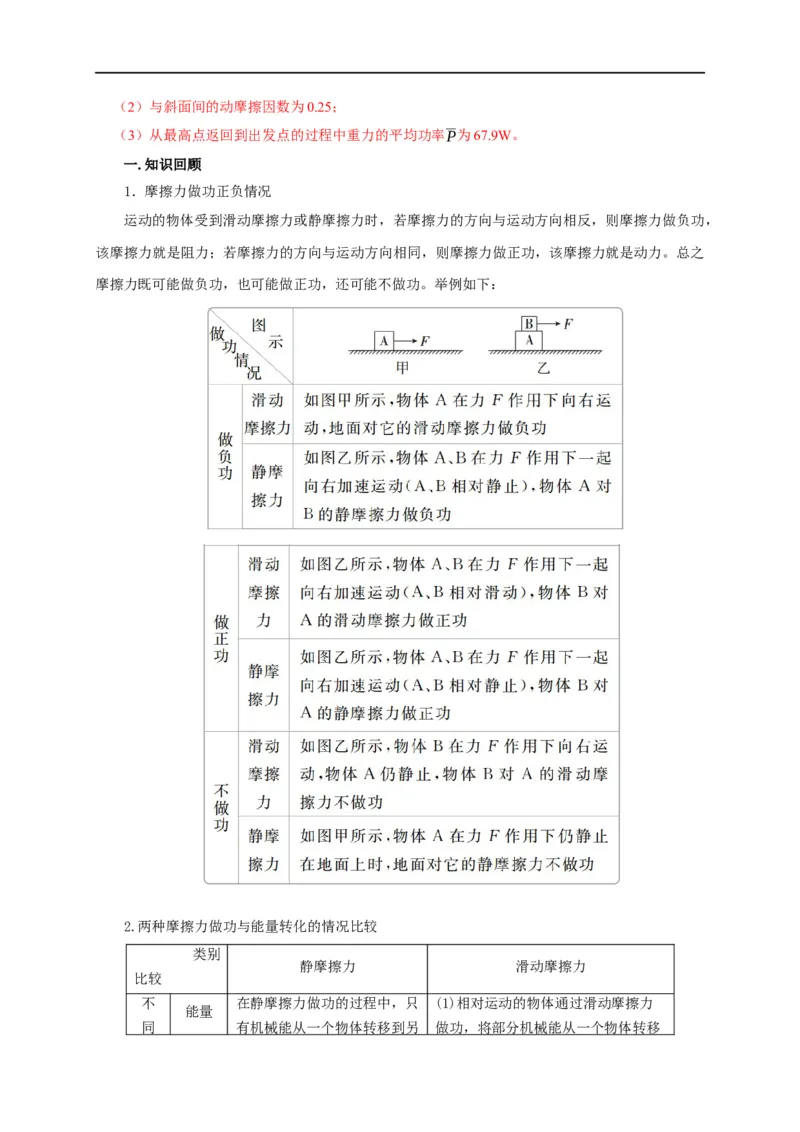
1.摩擦力做功正负情况
运动的物体受到滑动摩擦力或静摩擦力时,若摩擦力的方向与运动方向相反,则摩擦力做负功,
该摩擦力就是阻力;若摩擦力的方向与运动方向相同,则摩擦力做正功,该摩擦力就是动力。总之
摩擦力既可能做负功,也可能做正功,还可能不做功。举例如下:
2.两种摩擦力做功与能量转化的情况比较
类别
静摩擦力 滑动摩擦力
比较
不 在静摩擦力做功的过程中,只 (1)相对运动的物体通过滑动摩擦力
能量
同 有机械能从一个物体转移到另 做功,将部分机械能从一个物体转移的转 一个物体(静摩擦力起着传递 到另一个物体
化方 机械能的作用),而没有机械 (2)部分机械能转化为内能,此部分
面 能转化为其他形式的能量 能量就是系统机械能的损失量
一对 一对相互作用的滑动摩擦力对物体系
点
摩擦 统所做的总功,等于摩擦力与两个物
一对静摩擦力所做功的代数和
力的 体相对路程的乘积且为负功,即W =
Ff
总等于零
总功 -F·x ,表示物体克服摩擦力做
f 相对
方面 功,系统损失的机械能转变成内能Q
正功、
相
负功、
同 两种摩擦力对物体都可以做正功、负功,还可以不做功
不做功
点
方面
5.摩擦力做功计算要注意过程中位移的方向是否改变。
(1)物体在粗糙水平面上做单方向的直线运动时,路程与位移大小相等,此时摩擦力做功W=-
Fl(l指位移,F指摩擦力)。
(2)物体在粗糙水平面上做往复运动或曲线运动时,路程与位移大小不同,此时摩擦力做功W=
-Fs(s指路程,F指摩擦力)。
6.易错点:
(1)计算摩擦力做功时,物体的位移是指对地的位移。而计算摩擦热时,是该摩擦力的施
力物体与受力物体之间相对运动运动的路程。
2一对静摩擦力的总功为零是因为物体间的静摩擦力总是大小相等、方向相反,而它们运
动时相对地面的位移是相同的,所以物体之间的静摩擦力若做功,则必定对一个物体做正功,对另
一个物体做等量负功。但是滑动摩擦存在相对运动,对地面的位移不同,其正负功不相等。
3摩擦力做功问题,常涉及两个物体的相对运动,要注意两物体的位移关系。
二.摩擦力做功与摩擦热公式推导
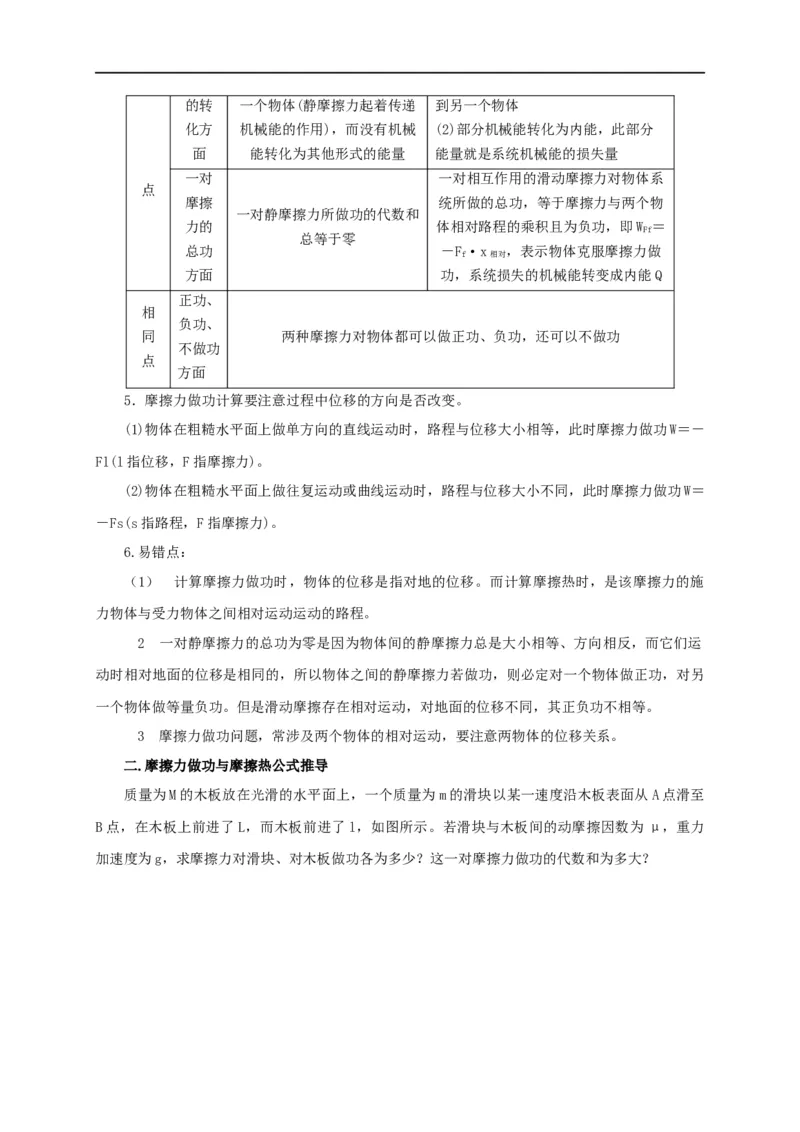
质量为M的木板放在光滑的水平面上,一个质量为m的滑块以某一速度沿木板表面从A点滑至
B点,在木板上前进了L,而木板前进了l,如图所示。若滑块与木板间的动摩擦因数为 μ,重力
加速度为g,求摩擦力对滑块、对木板做功各为多少?这一对摩擦力做功的代数和为多大?[答案] -μmg(l+L) μmgl -μmgL
思维引导:
(1)滑块的位移多大?所受摩擦力的方向是什么?
提示:滑块的位移是木板前进的距离l再加上它相对木板前进的距离L,表达式为(l+L)。滑
块受到的摩擦力与运动方向相反。
(2)木板所受摩擦力的方向是什么?
提示:木板是被滑块带着向前的,其摩擦力与运动方向相同。
[解析] 滑块所受摩擦力F =μmg,位移为(l+L),且摩擦力与位移方向相反,故摩擦力对滑
f
块做的功为:W=-μmg(l+L)
1
木板所受的摩擦力F′=μmg,方向与其位移l方向相同,故摩擦力对木板做的功W=μmgl
f 2
这一对摩擦力做功的代数和W=W+W=-μmgL
1 2
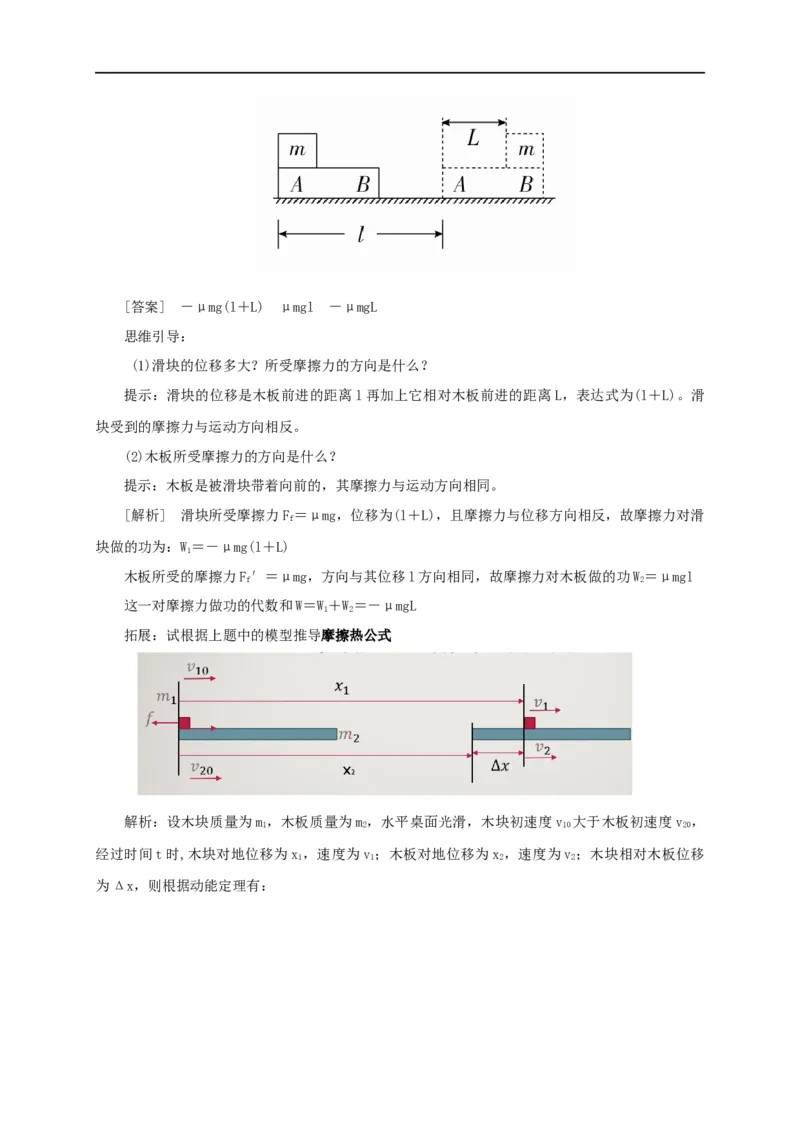
拓展:试根据上题中的模型推导摩擦热公式
解析:设木块质量为m ,木板质量为m ,水平桌面光滑,木块初速度v 大于木板初速度v ,
1 2 10 20
经过时间t时,木块对地位移为x ,速度为v ;木板对地位移为x ,速度为v ;木块相对木板位移
1 1 2 2
为Δx,则根据动能定理有:二.例题精析
题型一:板块模型中的摩擦热
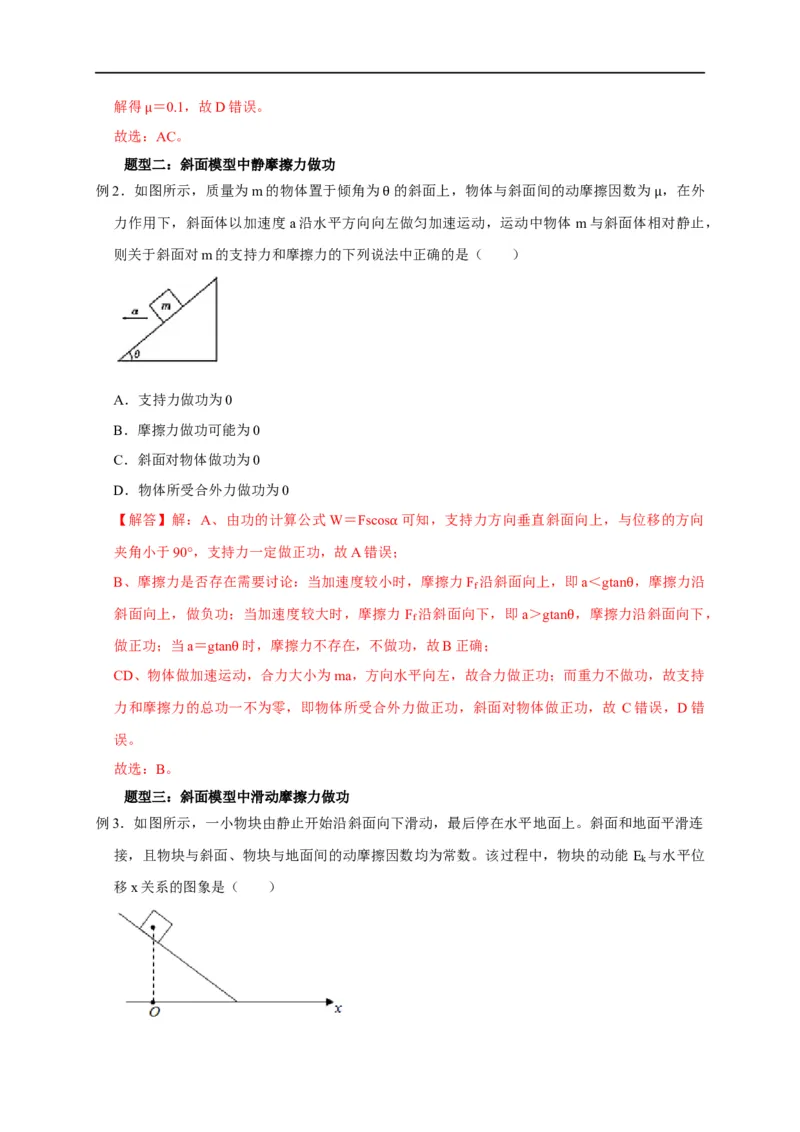
(多选)例1.如图甲,长木板A放在光滑的水平面上,质量为m=3kg的另一木块B可看作质点,
以水平速度v =2m/s滑上原来静止的长木板A的表面。由于A、B间存在摩擦,之后A、B速度
0
随时间变化情况如图乙所示,则下列说法正确的是(g取10m/s2)( )
A.木板的质量为M=3kg
B.木块减小的动能为1.5J
C.系统损失的机械能为3J
D.A、B间的动摩擦因数为0.2
【解答】解:A、根据v﹣t图象可知,0﹣1s内A和B的加速度大小相等,而A、B受到的合力
大小都等于A、B之间的滑动摩擦力,根据牛顿第二定律可知,A、B的质量相等,则A的质量
为M=3kg,故A正确;
1 1 1 1
B、木块减小的动能为△E =E ﹣E = mv2- mv2= ×3×22J- ×3×12J=4.5J,故B
k1 k0 k1 2 0 2 1 2 2
错误;
1 1 1
C、系统损失的机械能△E= mv2- mv2- Mv2=3J,故C正确;
2 0 2 1 2 1
D、对木板A分析,根据牛顿第二定律有 mg=Ma,
根据v﹣t图象知a= △v =1m/s2, μ
△t解得 =0.1,故D错误。
故选:μAC。
题型二:斜面模型中静摩擦力做功
例2.如图所示,质量为m的物体置于倾角为 的斜面上,物体与斜面间的动摩擦因数为 ,在外
力作用下,斜面体以加速度a沿水平方向向θ左做匀加速运动,运动中物体m与斜面体相μ对静止,
则关于斜面对m的支持力和摩擦力的下列说法中正确的是( )
A.支持力做功为0
B.摩擦力做功可能为0
C.斜面对物体做功为0
D.物体所受合外力做功为0
【解答】解:A、由功的计算公式W=Fscos 可知,支持力方向垂直斜面向上,与位移的方向
夹角小于90°,支持力一定做正功,故A错误α;
B、摩擦力是否存在需要讨论:当加速度较小时,摩擦力F 沿斜面向上,即a<gtan ,摩擦力沿
f
斜面向上,做负功;当加速度较大时,摩擦力 F 沿斜面向下,即a>gtan ,摩擦力θ沿斜面向下,
f
做正功;当a=gtan 时,摩擦力不存在,不做功,故B正确; θ
CD、物体做加速运θ动,合力大小为ma,方向水平向左,故合力做正功;而重力不做功,故支持
力和摩擦力的总功一不为零,即物体所受合外力做正功,斜面对物体做正功,故 C错误,D错
误。
故选:B。
题型三:斜面模型中滑动摩擦力做功
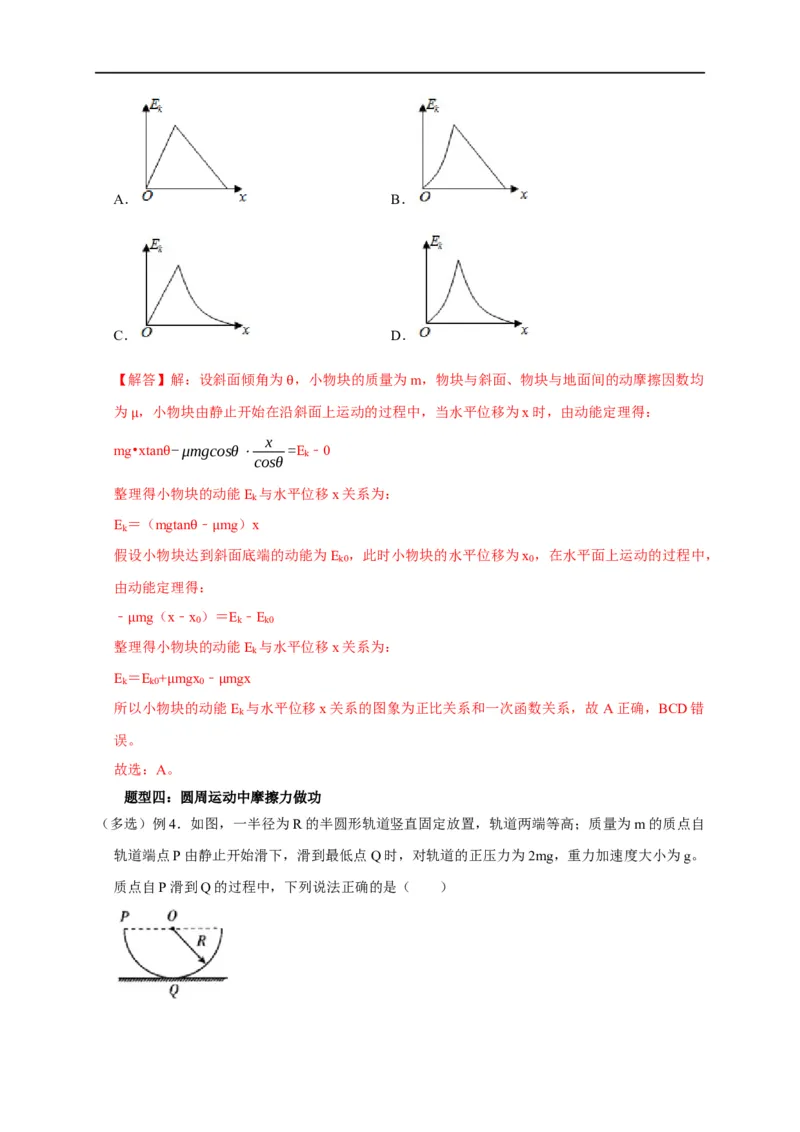
例3.如图所示,一小物块由静止开始沿斜面向下滑动,最后停在水平地面上。斜面和地面平滑连
接,且物块与斜面、物块与地面间的动摩擦因数均为常数。该过程中,物块的动能 E 与水平位
k
移x关系的图象是( )A. B.
C. D.
【解答】解:设斜面倾角为 ,小物块的质量为m,物块与斜面、物块与地面间的动摩擦因数均
为 ,小物块由静止开始在沿θ斜面上运动的过程中,当水平位移为x时,由动能定理得:
μ x
mg•xtan -μmgcosθ⋅ =E
k
﹣0
cosθ
θ
整理得小物块的动能E 与水平位移x关系为:
k
E =(mgtan ﹣ mg)x
k
假设小物块达θ到μ斜面底端的动能为E ,此时小物块的水平位移为x ,在水平面上运动的过程中,
k0 0
由动能定理得:
﹣ mg(x﹣x )=E ﹣E
0 k k0
整μ理得小物块的动能E 与水平位移x关系为:
k
E =E + mgx ﹣ mgx
k k0 0
所以小物μ块的动能μ E 与水平位移x关系的图象为正比关系和一次函数关系,故 A正确,BCD错
k
误。
故选:A。
题型四:圆周运动中摩擦力做功
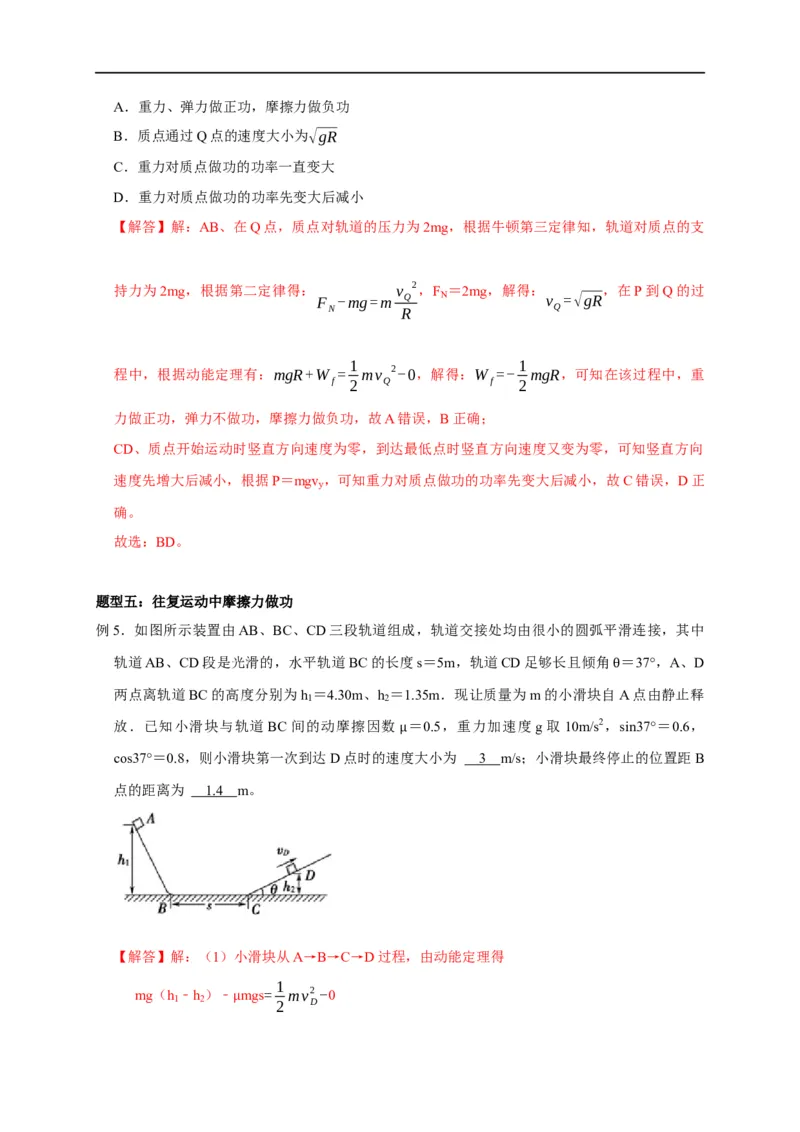
(多选)例4.如图,一半径为R的半圆形轨道竖直固定放置,轨道两端等高;质量为m的质点自
轨道端点P由静止开始滑下,滑到最低点Q时,对轨道的正压力为2mg,重力加速度大小为g。
质点自P滑到Q的过程中,下列说法正确的是( )A.重力、弹力做正功,摩擦力做负功
B.质点通过Q点的速度大小为√gR
C.重力对质点做功的功率一直变大
D.重力对质点做功的功率先变大后减小
【解答】解:AB、在Q点,质点对轨道的压力为2mg,根据牛顿第三定律知,轨道对质点的支
持力为2mg,根据第二定律得: v 2,F =2mg,解得: ,在P到Q的过
F -mg=m Q N v =√gR
N R Q
1 1
程中,根据动能定理有:mgR+W = mv 2-0,解得:W =- mgR,可知在该过程中,重
f 2 Q f 2
力做正功,弹力不做功,摩擦力做负功,故A错误,B正确;
CD、质点开始运动时竖直方向速度为零,到达最低点时竖直方向速度又变为零,可知竖直方向
速度先增大后减小,根据P=mgv ,可知重力对质点做功的功率先变大后减小,故C错误,D正
y
确。
故选:BD。
题型五:往复运动中摩擦力做功
例5.如图所示装置由AB、BC、CD三段轨道组成,轨道交接处均由很小的圆弧平滑连接,其中
轨道AB、CD段是光滑的,水平轨道BC的长度s=5m,轨道CD足够长且倾角 =37°,A、D
两点离轨道BC的高度分别为h =4.30m、h =1.35m.现让质量为m的小滑块自θA点由静止释
1 2
放.已知小滑块与轨道 BC间的动摩擦因数 =0.5,重力加速度 g取10m/s2,sin37°=0.6,
cos37°=0.8,则小滑块第一次到达D点时的速μ度大小为 3 m/s;小滑块最终停止的位置距B
点的距离为 1. 4 m。
【解答】解:(1)小滑块从A→B→C→D过程,由动能定理得
1
mg(h ﹣h )﹣ mgs= mv2 -0
1 2 2 D
μ解得:v m/s=3m/s
D=√2g(h -h )-2μgs=√2×10×(4.30-1.35)-2×0.5×10×5
1 2
即小滑块第一次到达D点时的速度大小v 为3m/s。
D
(2)设小滑块在水平轨道上运动的总路程为S总 。
对小滑块运动全过程,利用动能定理,
有:mgh
1
﹣ mgs总 =0
hμ 4.3
解得s总 = 1= m=8.6m
μ 0.5
故小滑块最终停止的位置距B点的距离为 2s﹣s总 =2×5m﹣8.6m=1.4m
即小滑块最终停止的位置距B点的距离为1.4m。
故答案为:(1)3(2)1.4
题型六:传送带中摩擦力做功与摩擦热
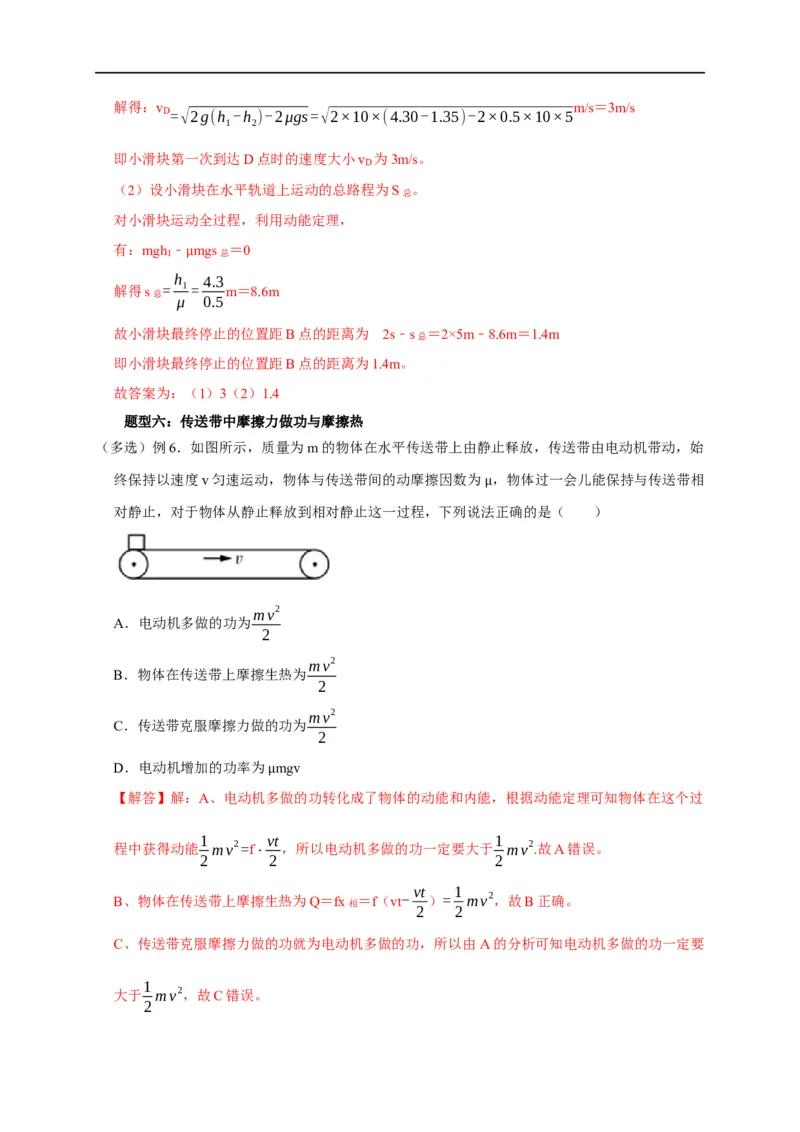
(多选)例6.如图所示,质量为m的物体在水平传送带上由静止释放,传送带由电动机带动,始
终保持以速度v匀速运动,物体与传送带间的动摩擦因数为 ,物体过一会儿能保持与传送带相
对静止,对于物体从静止释放到相对静止这一过程,下列说法μ正确的是( )
mv2
A.电动机多做的功为
2
mv2
B.物体在传送带上摩擦生热为
2
mv2
C.传送带克服摩擦力做的功为
2
D.电动机增加的功率为 mgv
【解答】解:A、电动机多μ做的功转化成了物体的动能和内能,根据动能定理可知物体在这个过
1 vt 1
程中获得动能 mv2=f⋅ ,所以电动机多做的功一定要大于 mv2.故A错误。
2 2 2
vt 1
B、物体在传送带上摩擦生热为Q=fx相 =f(vt- )= mv2,故B正确。
2 2
C、传送带克服摩擦力做的功就为电动机多做的功,所以由A的分析可知电动机多做的功一定要
1
大于 mv2,故C错误。
2D、电动机增加的功率即为克服摩擦力做功的功率,大小为fv= mgv,故D正确。
故选:BD。 μ
三.举一反三,巩固练习
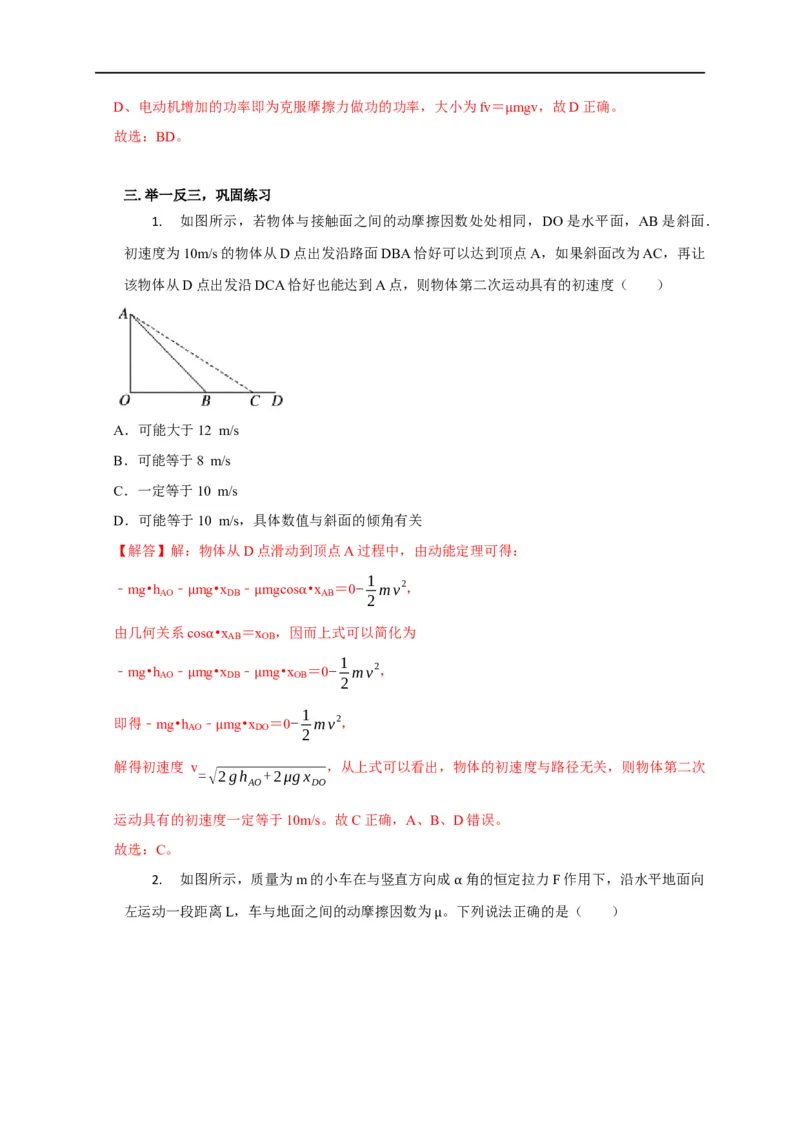
1. 如图所示,若物体与接触面之间的动摩擦因数处处相同,DO是水平面,AB是斜面.
初速度为10m/s的物体从D点出发沿路面DBA恰好可以达到顶点A,如果斜面改为AC,再让
该物体从D点出发沿DCA恰好也能达到A点,则物体第二次运动具有的初速度( )
A.可能大于12 m/s
B.可能等于8 m/s
C.一定等于10 m/s
D.可能等于10 m/s,具体数值与斜面的倾角有关
【解答】解:物体从D点滑动到顶点A过程中,由动能定理可得:
1
﹣mg•h ﹣ mg•x ﹣ mgcos •x =0- mv2,
AO DB AB
2
μ μ α
由几何关系cos •x =x ,因而上式可以简化为
AB OB
﹣mg•h ﹣ m α g•x ﹣ mg•x =0- 1 mv2,
AO DB OB
2
μ μ
1
即得﹣mg•h ﹣ mg•x =0- mv2,
AO DO
2
μ
解得初速度 v ,从上式可以看出,物体的初速度与路径无关,则物体第二次
=√2gh +2μgx
AO DO
运动具有的初速度一定等于10m/s。故C正确,A、B、D错误。
故选:C。
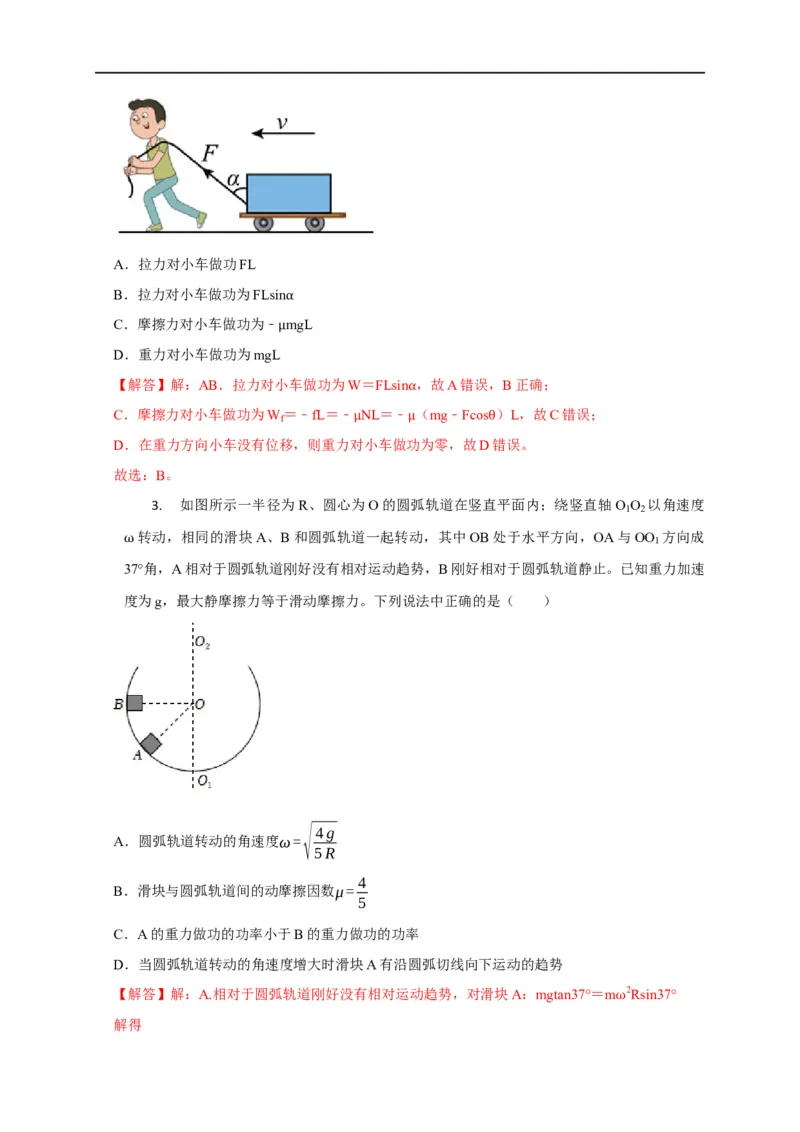
2. 如图所示,质量为m的小车在与竖直方向成 角的恒定拉力F作用下,沿水平地面向
左运动一段距离L,车与地面之间的动摩擦因数为 。α下列说法正确的是( )
μA.拉力对小车做功FL
B.拉力对小车做功为FLsin
C.摩擦力对小车做功为﹣ αmgL
D.重力对小车做功为mgLμ
【解答】解:AB.拉力对小车做功为W=FLsin ,故A错误,B正确;
C.摩擦力对小车做功为W
f
=﹣fL=﹣ NL=﹣α(mg﹣Fcos )L,故C错误;
D.在重力方向小车没有位移,则重力对μ小车做功μ 为零,故Dθ错误。
故选:B。
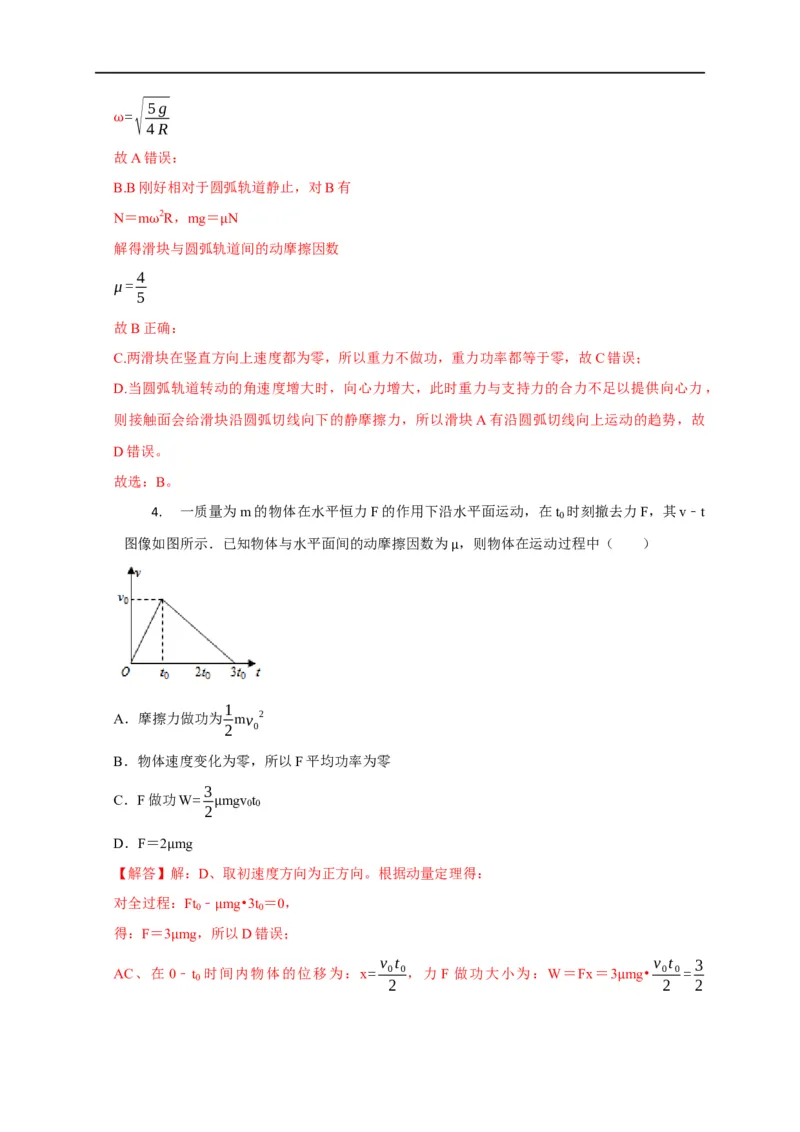
3. 如图所示一半径为R、圆心为O的圆弧轨道在竖直平面内;绕竖直轴O O 以角速度
1 2
转动,相同的滑块A、B和圆弧轨道一起转动,其中OB处于水平方向,OA与OO 方向成
1
ω37°角,A相对于圆弧轨道刚好没有相对运动趋势,B刚好相对于圆弧轨道静止。已知重力加速
度为g,最大静摩擦力等于滑动摩擦力。下列说法中正确的是( )
√4g
A.圆弧轨道转动的角速度ω=
5R
4
B.滑块与圆弧轨道间的动摩擦因数μ=
5
C.A的重力做功的功率小于B的重力做功的功率
D.当圆弧轨道转动的角速度增大时滑块A有沿圆弧切线向下运动的趋势
【解答】解:A.相对于圆弧轨道刚好没有相对运动趋势,对滑块A:mgtan37°=m 2Rsin37°
解得 ω√ 5g
=
4R
ω
故A错误:
B.B刚好相对于圆弧轨道静止,对B有
N=m 2R,mg= N
解得滑ω块与圆弧轨μ道间的动摩擦因数
4
μ=
5
故B正确:
C.两滑块在竖直方向上速度都为零,所以重力不做功,重力功率都等于零,故C错误;
D.当圆弧轨道转动的角速度增大时,向心力增大,此时重力与支持力的合力不足以提供向心力,
则接触面会给滑块沿圆弧切线向下的静摩擦力,所以滑块A有沿圆弧切线向上运动的趋势,故
D错误。
故选:B。
4. 一质量为m的物体在水平恒力F的作用下沿水平面运动,在t 时刻撤去力F,其v﹣t
0
图像如图所示.已知物体与水平面间的动摩擦因数为 ,则物体在运动过程中( )
μ
1
A.摩擦力做功为 mv 2
2 0
B.物体速度变化为零,所以F平均功率为零
3
C.F做功W= mgv t
00
2
μ
D.F=2 mg
【解答】μ解:D、取初速度方向为正方向。根据动量定理得:
对全过程:Ft ﹣ mg•3t =0,
0 0
得:F=3 mg,所μ以D错误;
μ v t v t 3
AC、在 0﹣t 时间内物体的位移为:x= 0 0,力 F 做功大小为:W=Fx=3 mg• 0 0=
0
2 2 2
μ3
mgv t ,所以摩擦力做功为- mgv t ,又摩擦力做负功,故A错误,C正确;
00 00
2
μ μ
B、F作用时间在0﹣t 段,在此时间内物体的速度变化不为零,所以F的平均功率不为零,故B
0
错误。
故选:C。
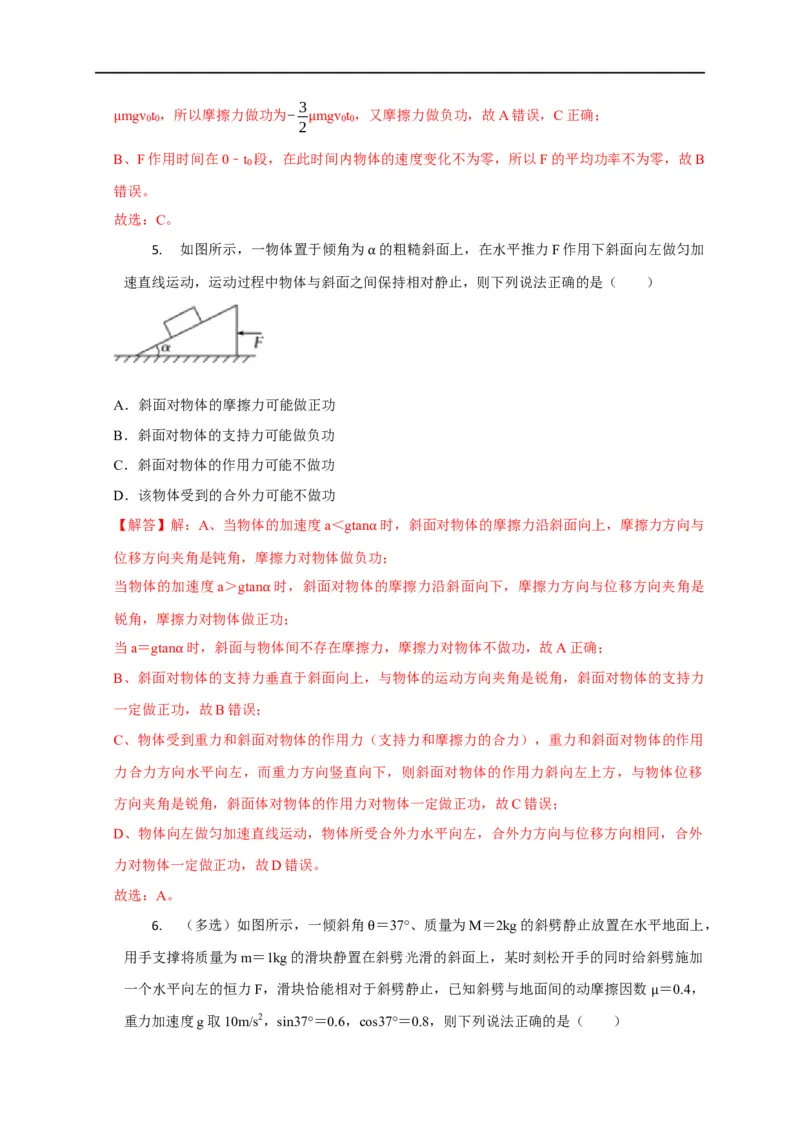
5. 如图所示,一物体置于倾角为 的粗糙斜面上,在水平推力F作用下斜面向左做匀加
速直线运动,运动过程中物体与斜面之间α保持相对静止,则下列说法正确的是( )
A.斜面对物体的摩擦力可能做正功
B.斜面对物体的支持力可能做负功
C.斜面对物体的作用力可能不做功
D.该物体受到的合外力可能不做功
【解答】解:A、当物体的加速度a<gtan 时,斜面对物体的摩擦力沿斜面向上,摩擦力方向与
位移方向夹角是钝角,摩擦力对物体做负功α ;
当物体的加速度a>gtan 时,斜面对物体的摩擦力沿斜面向下,摩擦力方向与位移方向夹角是
锐角,摩擦力对物体做正α功;
当a=gtan 时,斜面与物体间不存在摩擦力,摩擦力对物体不做功,故A正确;
B、斜面对α物体的支持力垂直于斜面向上,与物体的运动方向夹角是锐角,斜面对物体的支持力
一定做正功,故B错误;
C、物体受到重力和斜面对物体的作用力(支持力和摩擦力的合力),重力和斜面对物体的作用
力合力方向水平向左,而重力方向竖直向下,则斜面对物体的作用力斜向左上方,与物体位移
方向夹角是锐角,斜面体对物体的作用力对物体一定做正功,故C错误;
D、物体向左做匀加速直线运动,物体所受合外力水平向左,合外力方向与位移方向相同,合外
力对物体一定做正功,故D错误。
故选:A。
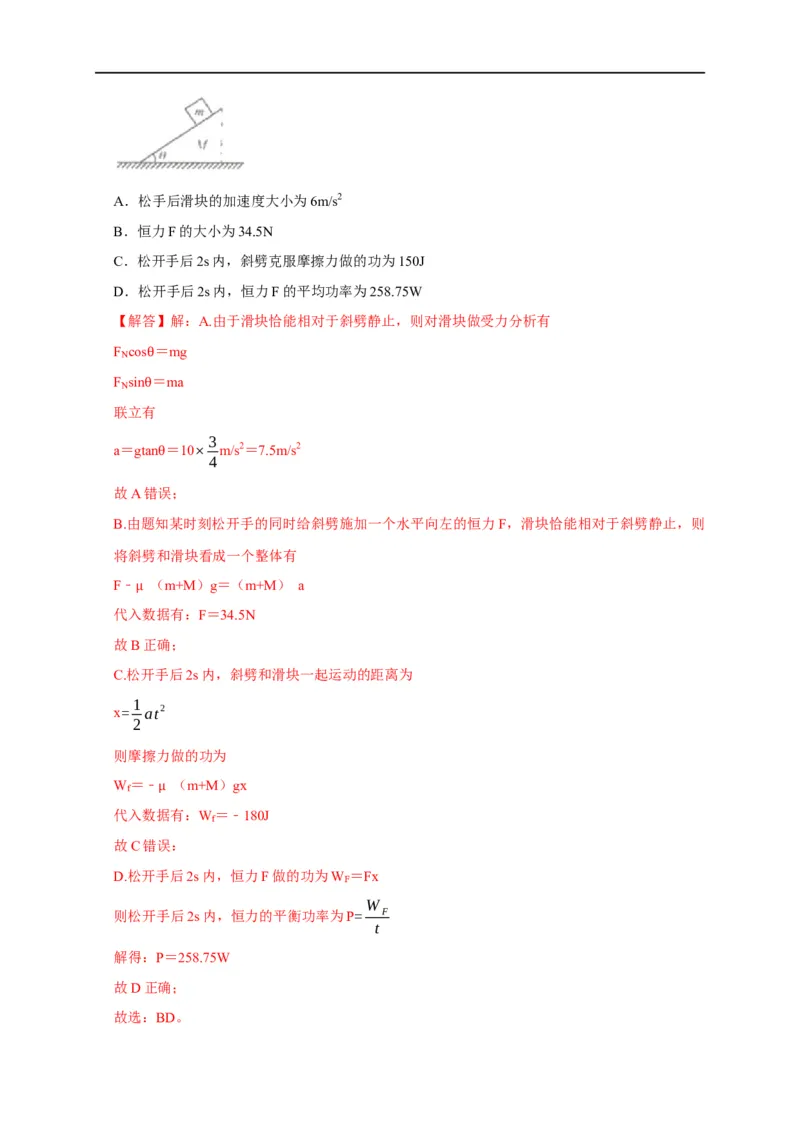
6. (多选)如图所示,一倾斜角 =37°、质量为M=2kg的斜劈静止放置在水平地面上,
用手支撑将质量为m=1kg的滑块静置在θ斜劈光滑的斜面上,某时刻松开手的同时给斜劈施加
一个水平向左的恒力F,滑块恰能相对于斜劈静止,已知斜劈与地面间的动摩擦因数 =0.4,
重力加速度g取10m/s2,sin37°=0.6,cos37°=0.8,则下列说法正确的是( ) μA.松手后滑块的加速度大小为6m/s2
B.恒力F的大小为34.5N
C.松开手后2s内,斜劈克服摩擦力做的功为150J
D.松开手后2s内,恒力F的平均功率为258.75W
【解答】解:A.由于滑块恰能相对于斜劈静止,则对滑块做受力分析有
F cos =mg
N
F sinθ=ma
N
联立有θ
3
a=gtan =10× m/s2=7.5m/s2
4
θ
故A错误;
B.由题知某时刻松开手的同时给斜劈施加一个水平向左的恒力F,滑块恰能相对于斜劈静止,则
将斜劈和滑块看成一个整体有
F﹣ (m+M)g=(m+M) a
代入μ数据有:F=34.5N
故B正确;
C.松开手后2s内,斜劈和滑块一起运动的距离为
1
x= at2
2
则摩擦力做的功为
W=﹣ (m+M)gx
f
代入数据μ 有:W=﹣180J
f
故C错误:
D.松开手后2s内,恒力F做的功为W =Fx
F
W
则松开手后2s内,恒力的平衡功率为P= F
t
解得:P=258.75W
故D正确;
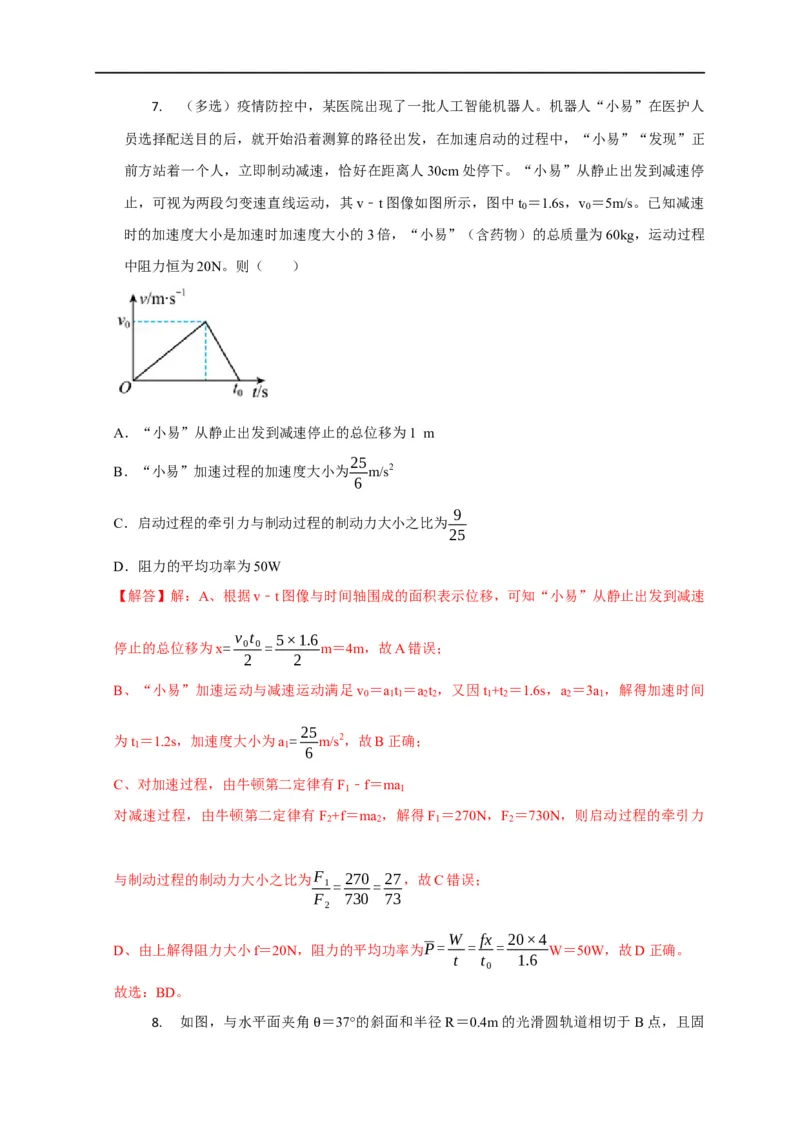
故选:BD。7. (多选)疫情防控中,某医院出现了一批人工智能机器人。机器人“小易”在医护人
员选择配送目的后,就开始沿着测算的路径出发,在加速启动的过程中,“小易”“发现”正
前方站着一个人,立即制动减速,恰好在距离人30cm处停下。“小易”从静止出发到减速停
止,可视为两段匀变速直线运动,其v﹣t图像如图所示,图中t =1.6s,v =5m/s。已知减速
0 0
时的加速度大小是加速时加速度大小的3倍,“小易”(含药物)的总质量为60kg,运动过程
中阻力恒为20N。则( )
A.“小易”从静止出发到减速停止的总位移为1 m
25
B.“小易”加速过程的加速度大小为 m/s2
6
9
C.启动过程的牵引力与制动过程的制动力大小之比为
25
D.阻力的平均功率为50W
【解答】解:A、根据v﹣t图像与时间轴围成的面积表示位移,可知“小易”从静止出发到减速
v t 5×1.6
停止的总位移为x= 0 0= m=4m,故A错误;
2 2
B、“小易”加速运动与减速运动满足v =a t =a t ,又因t +t =1.6s,a =3a ,解得加速时间
0 11 22 1 2 2 1
25
为t =1.2s,加速度大小为a = m/s2,故B正确;
1 1
6
C、对加速过程,由牛顿第二定律有F ﹣f=ma
1 1
对减速过程,由牛顿第二定律有F +f=ma ,解得F =270N,F =730N,则启动过程的牵引力
2 2 1 2
与制动过程的制动力大小之比为F 270 27,故C错误;
1= =
F 730 73
2
W fx 20×4
D、由上解得阻力大小f=20N,阻力的平均功率为P= = = W=50W,故D正确。
t t 1.6
0
故选:BD。
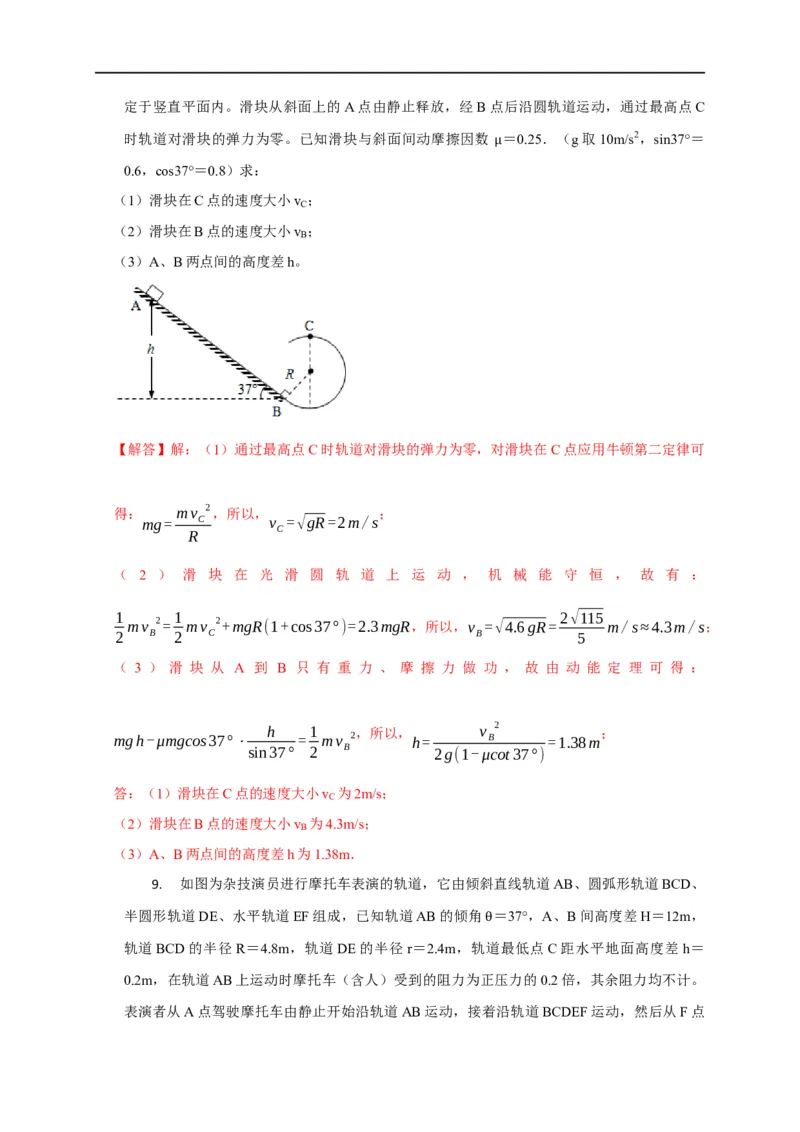
8. 如图,与水平面夹角 =37°的斜面和半径R=0.4m的光滑圆轨道相切于B点,且固
θ定于竖直平面内。滑块从斜面上的A点由静止释放,经B点后沿圆轨道运动,通过最高点C
时轨道对滑块的弹力为零。已知滑块与斜面间动摩擦因数 =0.25.(g取10m/s2,sin37°=
0.6,cos37°=0.8)求: μ
(1)滑块在C点的速度大小v ;
C
(2)滑块在B点的速度大小v ;
B
(3)A、B两点间的高度差h。
【解答】解:(1)通过最高点C时轨道对滑块的弹力为零,对滑块在C点应用牛顿第二定律可
得: mv 2,所以, ;
mg= C v =√gR=2m/s
C
R
( 2 ) 滑 块 在 光 滑 圆 轨 道 上 运 动 , 机 械 能 守 恒 , 故 有 :
1 1 2√115
mv 2= mv 2+mgR(1+cos37°)=2.3mgR,所以,v =√4.6gR= m/s≈4.3m/s;
2 B 2 C B 5
( 3 ) 滑 块 从 A 到 B 只 有 重 力 、 摩 擦 力 做 功 , 故 由 动 能 定 理 可 得 :
h 1 ,所以, v 2 ;
mgh-μmgcos37°⋅ = mv 2 h= B =1.38m
sin37° 2 B 2g(1-μcot37°)
答:(1)滑块在C点的速度大小v 为2m/s;
C
(2)滑块在B点的速度大小v 为4.3m/s;
B
(3)A、B两点间的高度差h为1.38m.
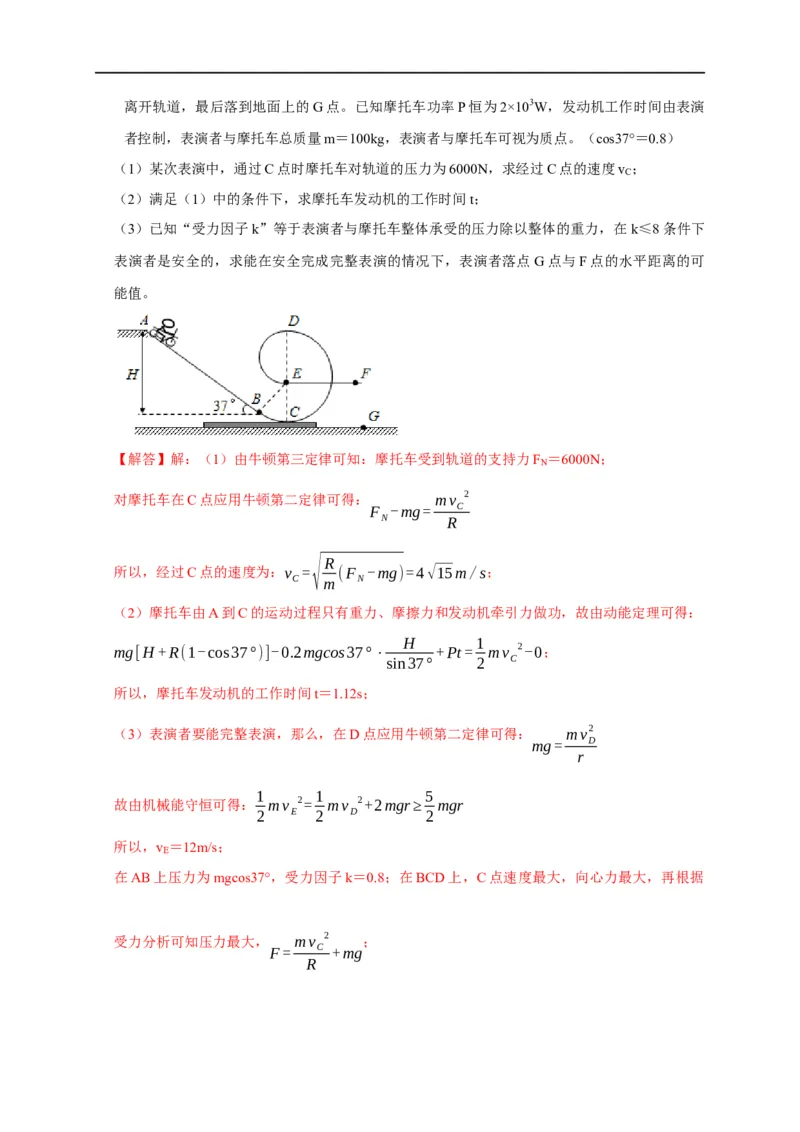
9. 如图为杂技演员进行摩托车表演的轨道,它由倾斜直线轨道AB、圆弧形轨道BCD、
半圆形轨道DE、水平轨道EF组成,已知轨道AB的倾角 =37°,A、B间高度差H=12m,
轨道BCD的半径R=4.8m,轨道DE的半径r=2.4m,轨θ道最低点C距水平地面高度差h=
0.2m,在轨道AB上运动时摩托车(含人)受到的阻力为正压力的0.2倍,其余阻力均不计。
表演者从A点驾驶摩托车由静止开始沿轨道AB运动,接着沿轨道BCDEF运动,然后从F点离开轨道,最后落到地面上的G点。已知摩托车功率P恒为2×103W,发动机工作时间由表演
者控制,表演者与摩托车总质量m=100kg,表演者与摩托车可视为质点。(cos37°=0.8)
(1)某次表演中,通过C点时摩托车对轨道的压力为6000N,求经过C点的速度v ;
C
(2)满足(1)中的条件下,求摩托车发动机的工作时间t;
(3)已知“受力因子k”等于表演者与摩托车整体承受的压力除以整体的重力,在k≤8条件下
表演者是安全的,求能在安全完成完整表演的情况下,表演者落点G点与F点的水平距离的可
能值。
【解答】解:(1)由牛顿第三定律可知:摩托车受到轨道的支持力F =6000N;
N
对摩托车在C点应用牛顿第二定律可得: mv 2
F -mg= C
N R
√R
所以,经过C点的速度为:v = (F -mg)=4√15m/s;
C m N
(2)摩托车由A到C的运动过程只有重力、摩擦力和发动机牵引力做功,故由动能定理可得:
H 1
mg[H+R(1-cos37°)]-0.2mgcos37°⋅ +Pt= mv 2-0;
sin37° 2 C
所以,摩托车发动机的工作时间t=1.12s;
(3)表演者要能完整表演,那么,在D点应用牛顿第二定律可得: mv2
mg= D
r
1 1 5
故由机械能守恒可得: mv 2= mv 2+2mgr≥ mgr
2 E 2 D 2
所以,v =12m/s;
E
在AB上压力为mgcos37°,受力因子k=0.8;在BCD上,C点速度最大,向心力最大,再根据
受力分析可知压力最大, mv 2 ;
F= C +mg
R在DE上类似,E点速度最大,向心力最大,再根据受力分析可知压力最大, mv 2
F'= E +mg
r
在EF上,压力为mg,故受力因子k=1;
1 1
由机械能守恒可得: mv 2=mgR+ mv 2
2 C 2 E
所以, mv 2+2mgR mv 2 ;
F= E +mg= E +3mg
R R
又有k≤8,所以,F≤8mg,故 ;F'≤8mg,故v m/s;
v ≤√5gR=√10gr E ≤√7gr=2√42
E
所以, ;
12m/s≤v ≤2√42m/s
E
那么,表演者从F做平抛运动的初速度v =v ;平抛运动的竖直位移y=R+h=5m;
F E
√2y
所以,运动时间t= =1s,那么,表演者落点G点与F点的水平距离x=v t
F
g
所以,12m≤x≤2√42m;
答:(1)某次表演中,通过C点时摩托车对轨道的压力为6000N,那么,经过C点的速度v 为
C
4√15m/s;
(2)满足(1)中的条件下,摩托车发动机的工作时间t为1.12s;
(3)已知“受力因子k”等于表演者与摩托车整体承受的压力除以整体的重力,在k≤8条件下
表演者是安全的;能在安全完成完整表演的情况下,表演者落点G点与F点的水平距离的取值
范围为12m≤x≤2√42m。

