
文档内容
专题 04 曲线运动
考点 五年考情(2021-2025) 命题趋势
在选择题和计算题中均有涉及。选择
考点1 平抛与
2021、2023、2024 题多考查基础概念,像平抛运动的特点、
斜抛
圆周运动的向心力分析等,难度适中。计
算题则常与其他知识综合,难度较大,例
如结合能量守恒、牛顿定律等,考查学生
对多过程复杂情境的分析能力,像带电粒
子在电磁场中的曲线运动这类问题。
平抛运动、圆周运动规律是高频考
点。平抛运动常考查运动的合成与分解方
法,通过生活实例如水平抛出物体来命
题;圆周运动侧重于向心力来源分析,如
考点2 圆周运 竖直平面内圆周运动的临界问题。同时,
2022、2021
动 近年还常将曲线运动与电场、磁场知识融
合,考查带电粒子在复合场中的曲线运动
轨迹及相关物理量计算。越来越多地融入
生活、科技等真实情境。如以体育项目中
的铅球运动考查平抛运动,以卫星绕地运
行考查圆周运动与万有引力定律结合。这
种情境化命题方式,要求学生从实际问题
中抽象出物理模型,提升运用知识解决实
际问题的能力 。
考点01 平抛与斜抛
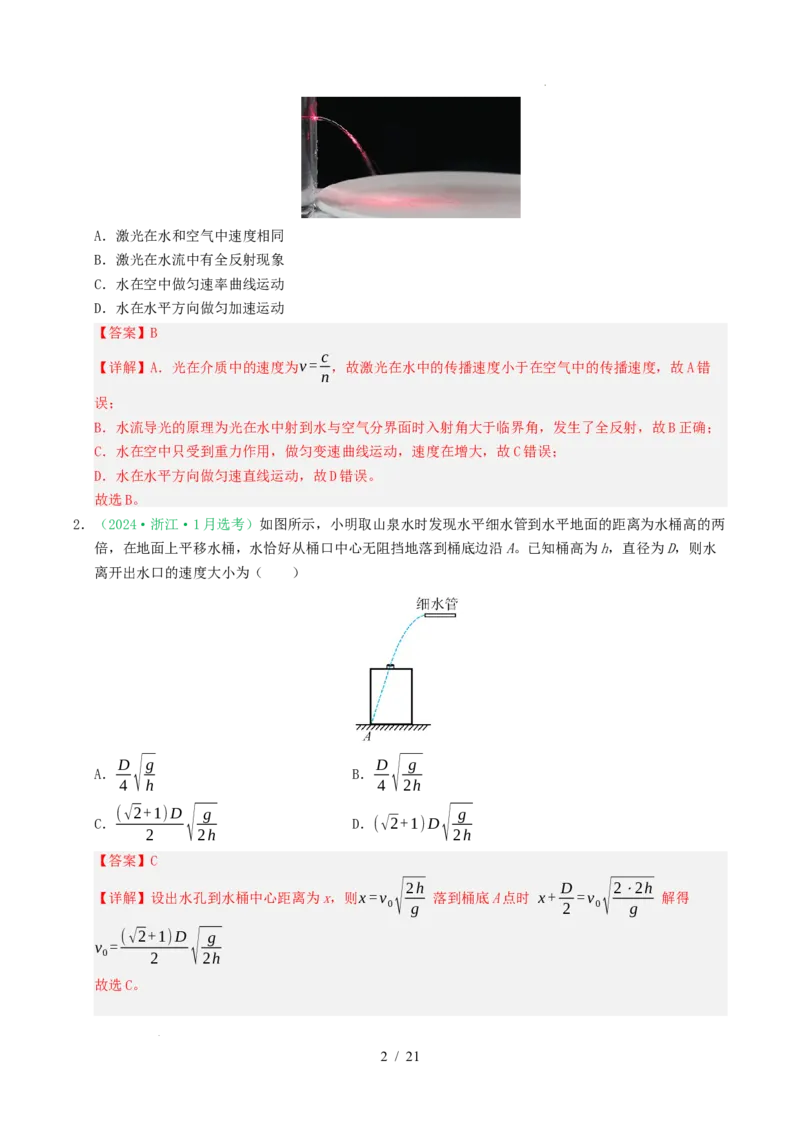
1.(2024·浙江·6月选考)如图为水流导光实验,出水口受激光照射,下面桶中的水被照亮,则
( )
1 / 21
学科网(北京)股份有限公司A.激光在水和空气中速度相同
B.激光在水流中有全反射现象
C.水在空中做匀速率曲线运动
D.水在水平方向做匀加速运动
【答案】B
c
【详解】A.光在介质中的速度为v= ,故激光在水中的传播速度小于在空气中的传播速度,故A错
n
误;
B.水流导光的原理为光在水中射到水与空气分界面时入射角大于临界角,发生了全反射,故B正确;
C.水在空中只受到重力作用,做匀变速曲线运动,速度在增大,故C错误;
D.水在水平方向做匀速直线运动,故D错误。
故选B。
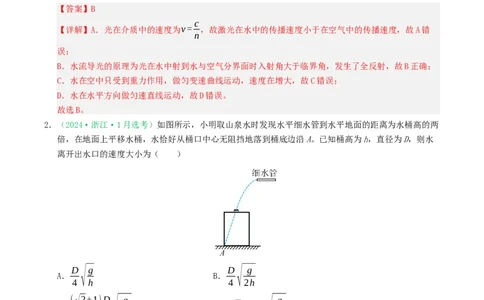
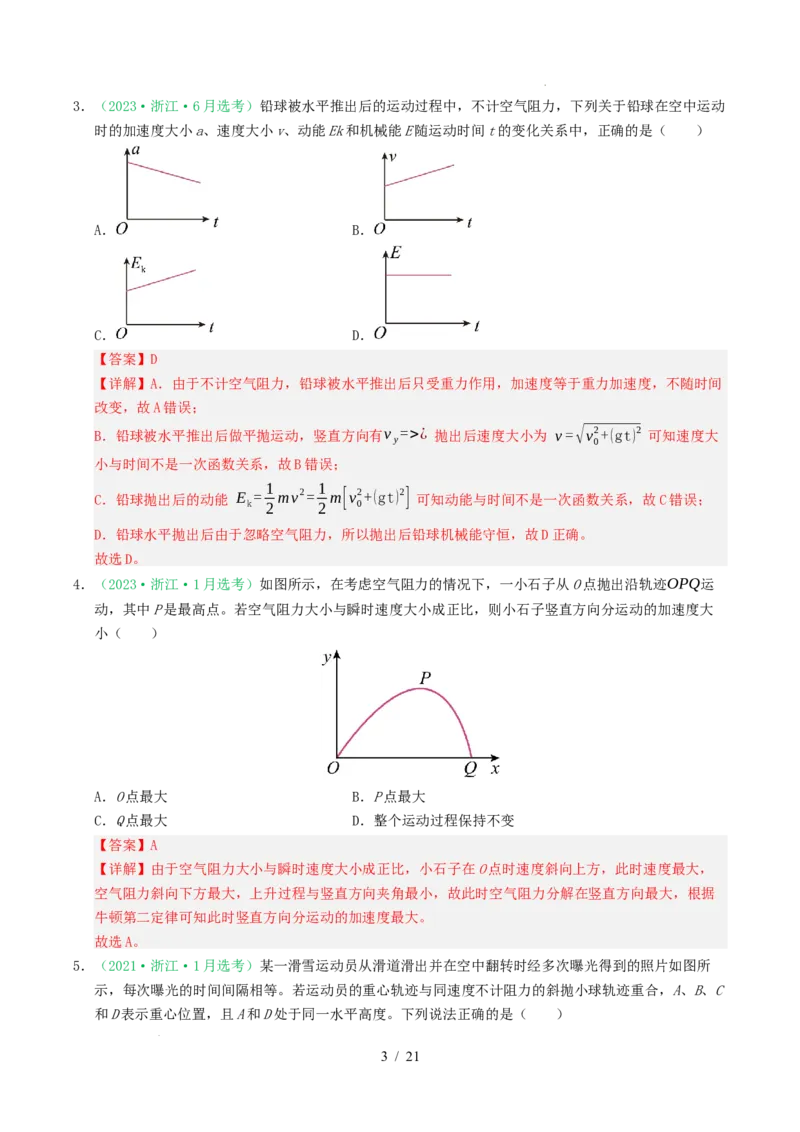
2.(2024·浙江·1月选考)如图所示,小明取山泉水时发现水平细水管到水平地面的距离为水桶高的两
倍,在地面上平移水桶,水恰好从桶口中心无阻挡地落到桶底边沿A。已知桶高为h,直径为D,则水
离开出水口的速度大小为( )
D √g D √ g
A. B.
4 h 4 2h
(√2+1)D √ g √ g
C. D.(√2+1)D
2 2h 2h
【答案】C
√2h D √2⋅2h
【详解】设出水孔到水桶中心距离为x,则x=v 落到桶底A点时 x+ =v 解得
0 g 2 0 g
(√2+1)D √ g
v =
0 2 2h
故选C。
2 / 21
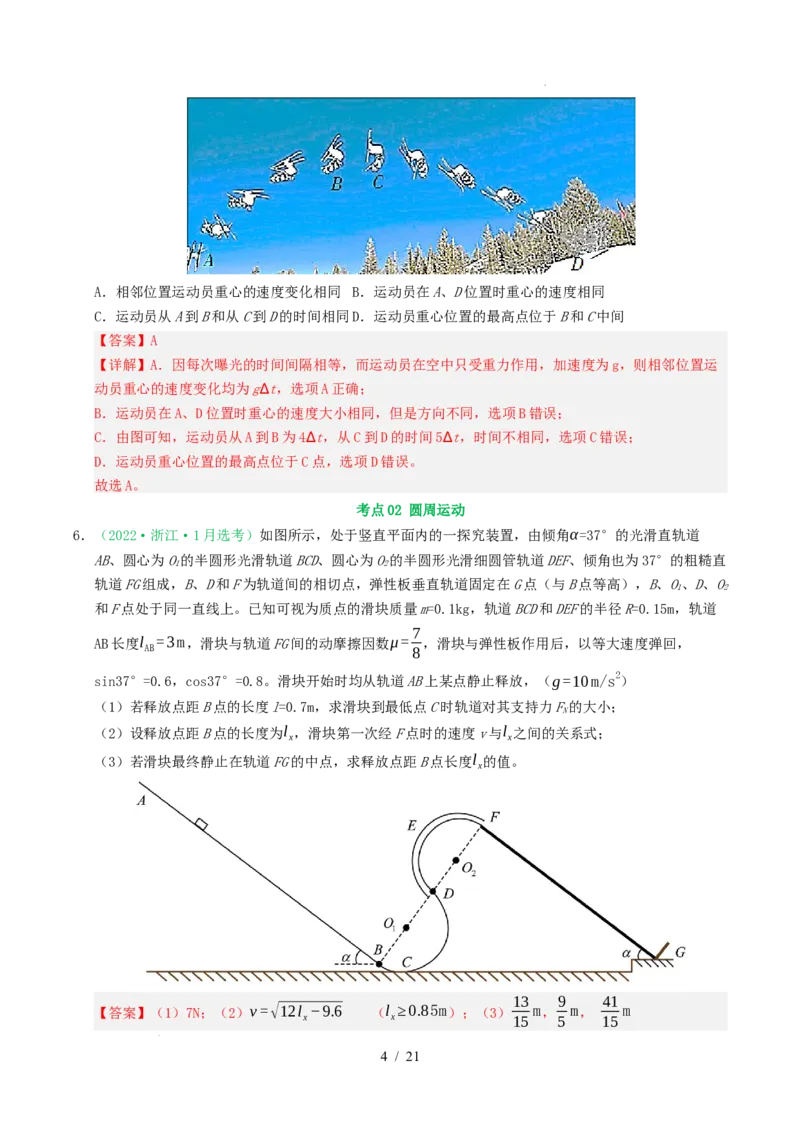
学科网(北京)股份有限公司3.(2023·浙江·6月选考)铅球被水平推出后的运动过程中,不计空气阻力,下列关于铅球在空中运动
时的加速度大小a、速度大小v、动能Ek和机械能E随运动时间t的变化关系中,正确的是( )
A. B.
C. D.
【答案】D
【详解】A.由于不计空气阻力,铅球被水平推出后只受重力作用,加速度等于重力加速度,不随时间
改变,故A错误;
B.铅球被水平推出后做平抛运动,竖直方向有v =>¿ 抛出后速度大小为 v=√v2+(gt) 2 可知速度大
y 0
小与时间不是一次函数关系,故B错误;
1 1
C.铅球抛出后的动能 E = mv2= m[v2+(gt) 2] 可知动能与时间不是一次函数关系,故C错误;
k 2 2 0
D.铅球水平抛出后由于忽略空气阻力,所以抛出后铅球机械能守恒,故D正确。
故选D。
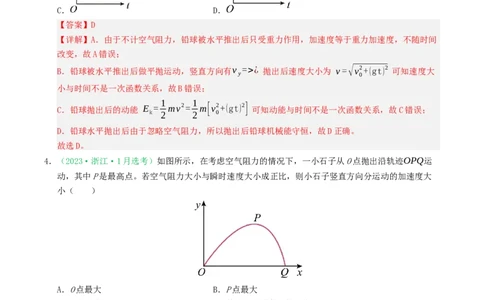
4.(2023·浙江·1月选考)如图所示,在考虑空气阻力的情况下,一小石子从O点抛出沿轨迹OPQ运
动,其中P是最高点。若空气阻力大小与瞬时速度大小成正比,则小石子竖直方向分运动的加速度大
小( )
A.O点最大 B.P点最大
C.Q点最大 D.整个运动过程保持不变
【答案】A
【详解】由于空气阻力大小与瞬时速度大小成正比,小石子在O点时速度斜向上方,此时速度最大,
空气阻力斜向下方最大,上升过程与竖直方向夹角最小,故此时空气阻力分解在竖直方向最大,根据
牛顿第二定律可知此时竖直方向分运动的加速度最大。
故选A。
5.(2021·浙江·1月选考)某一滑雪运动员从滑道滑出并在空中翻转时经多次曝光得到的照片如图所
示,每次曝光的时间间隔相等。若运动员的重心轨迹与同速度不计阻力的斜抛小球轨迹重合,A、B、C
和D表示重心位置,且A和D处于同一水平高度。下列说法正确的是( )
3 / 21
学科网(北京)股份有限公司A.相邻位置运动员重心的速度变化相同 B.运动员在A、D位置时重心的速度相同
C.运动员从A到B和从C到D的时间相同D.运动员重心位置的最高点位于B和C中间
【答案】A
【详解】A.因每次曝光的时间间隔相等,而运动员在空中只受重力作用,加速度为g,则相邻位置运
动员重心的速度变化均为g∆t,选项A正确;
B.运动员在A、D位置时重心的速度大小相同,但是方向不同,选项B错误;
C.由图可知,运动员从A到B为4∆t,从C到D的时间5∆t,时间不相同,选项C错误;
D.运动员重心位置的最高点位于C点,选项D错误。
故选A。
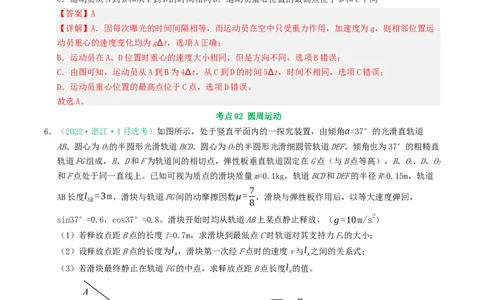
考点02 圆周运动
6.(2022·浙江·1月选考)如图所示,处于竖直平面内的一探究装置,由倾角α=37°的光滑直轨道
AB、圆心为O的半圆形光滑轨道BCD、圆心为O的半圆形光滑细圆管轨道DEF、倾角也为37°的粗糙直
1 2
轨道FG组成,B、D和F为轨道间的相切点,弹性板垂直轨道固定在G点(与B点等高),B、O、D、O
1 2
和F点处于同一直线上。已知可视为质点的滑块质量m=0.1kg,轨道BCD和DEF的半径R=0.15m,轨道
7
AB长度l =3m,滑块与轨道FG间的动摩擦因数μ= ,滑块与弹性板作用后,以等大速度弹回,
AB 8
sin37°=0.6,cos37°=0.8。滑块开始时均从轨道AB上某点静止释放,(g=10m/s2)
(1)若释放点距B点的长度l=0.7m,求滑块到最低点C时轨道对其支持力F的大小;
N
(2)设释放点距B点的长度为l ,滑块第一次经F点时的速度v与l 之间的关系式;
x x
(3)若滑块最终静止在轨道FG的中点,求释放点距B点长度l 的值。
x
13 9 41
【答案】(1)7N;(2)v=√12l −9.6 (l ≥0.85m);(3) m, m, m
x x 15 5 15
4 / 21
学科网(北京)股份有限公司1
【详解】(1)滑块释放运动到C点过程,由动能定理
mglsin37∘+mgR(1−cos37∘)= mv2
经过C
2 C
v2
点时 F −mg=m C 解得 F =7N
N R N
1
(2)能过最高点时,则能到F点,则恰到最高点时 mgl sin37∘−mg×4Rcos37∘= mv2 解得
x 2
v=√12l −9.6而要保证滑块能到达F点,必须要保证它能到达DEF最高点,当小球恰好到达DEF最高
x
点时,由动能定理 mgl sin37∘−mg(3Rcos37∘+R)=0 可解得 l =0.85m 则要保证小球能到F
x x
点,l ≥0.85m,带入v=√12l −9.6可得 v≥√0.6m/s
x x
(3)设全过程摩擦力对滑块做功为第一次到达中点时做功的n倍,则n=1,3,5,……
l l 7n+6
mgl sin37∘−mg FGsin37∘−nμmg FGcos37∘=0 解得 l = m n=1,3,5, …… 又因
x 2 2 x 15
13 9 41
为 l ≥l ≥0.85m,l =3m 当n=1时,l = m,当n=3时,l = m,当n=5时,l = m,满
AB x AB x1 15 x2 5 x3 15
13 9 41
足要求。 即若滑块最终静止在轨道FG的中点,释放点距B点长度l 的值可能为 m, m, m。
x 15 5 15
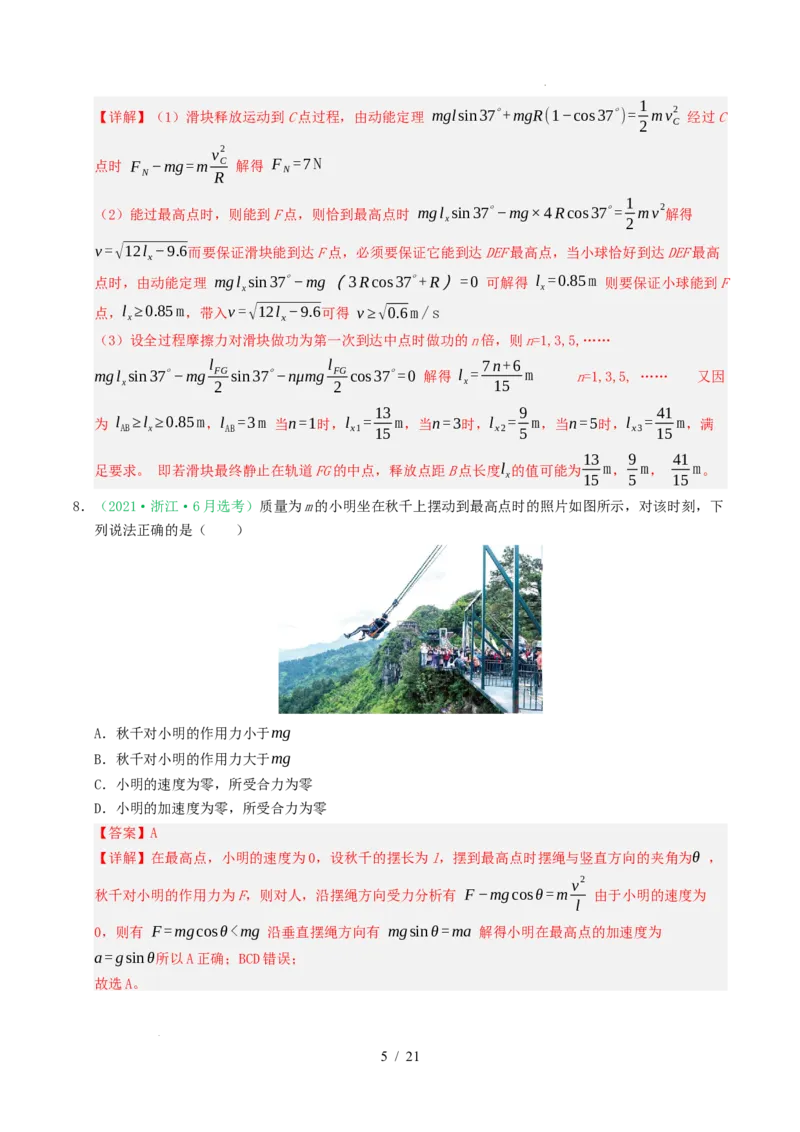
8.(2021·浙江·6月选考)质量为m的小明坐在秋千上摆动到最高点时的照片如图所示,对该时刻,下
列说法正确的是( )
A.秋千对小明的作用力小于mg
B.秋千对小明的作用力大于mg
C.小明的速度为零,所受合力为零
D.小明的加速度为零,所受合力为零
【答案】A
【详解】在最高点,小明的速度为0,设秋千的摆长为l,摆到最高点时摆绳与竖直方向的夹角为θ ,
v2
秋千对小明的作用力为F,则对人,沿摆绳方向受力分析有 F−mgcosθ=m 由于小明的速度为
l
0,则有 F=mgcosθ tan2θ
R
g+ω2Rtanθ
D.摩托车做圆周运动时车胎橡胶与圆锥内表面间的动摩擦因数μ≥
ω2R−gtanθ
【答案】D
【详解】ABD.摩托车在竖直面内的受力分析,如图所示
摩托车在竖直面内平衡,由平衡条件得Mg+F sinθ=f cosθ摩托车在水平面内做圆周运动,根据牛
N
顿第二定律,有F cosθ+f sinθ=mω2R 联立可得f =m(g+ω2Rtanθ)cosθ,
N
F =m(ω2R−gtanθ)cosθ
N
g+ω2Rtanθ
其中f ≤μF 所以可得μ≥ 可见摩托车的重量与实现圆锥面的内壁做圆周运动的难易程度
N ω2R−gtanθ
无关,摩托车无法实现圆锥面的内壁做圆周运动,故AB错误,D正确;
√ g
C.在临界条件下,轨道对摩托车的弹力恰好为0,则有F =0=mω2R−mgtanθ解得ω= tanθ
N R
√ g
要使摩托车做圆周运动,则角速度需要满足ω> tanθ 故C错误。
R
故选D。
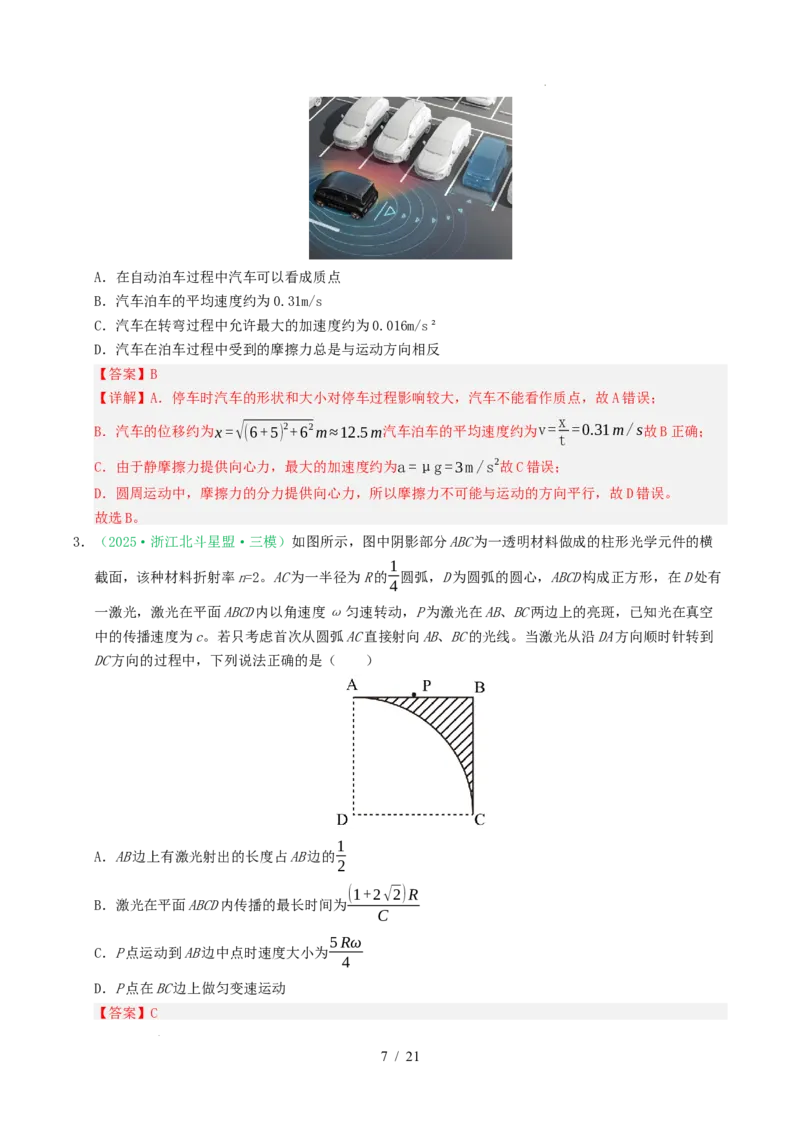
2.(2025·浙江精诚联盟·二模)电动汽车自动泊车如图所示,汽车按图示路线(半径为6m的1/4圆弧
与长为5m的直线构成)顺利停车成功,用时40s。汽车与地面间的动摩擦因数为0.3(最大静摩擦力等
于滑动摩擦力),下列说法正确的是( )
6 / 21
学科网(北京)股份有限公司A.在自动泊车过程中汽车可以看成质点
B.汽车泊车的平均速度约为0.31m/s
C.汽车在转弯过程中允许最大的加速度约为0.016m/s²
D.汽车在泊车过程中受到的摩擦力总是与运动方向相反
【答案】B
【详解】A.停车时汽车的形状和大小对停车过程影响较大,汽车不能看作质点,故A错误;
x
B.汽车的位移约为x=√(6+5) 2+62m≈12.5m汽车泊车的平均速度约为v= =0.31m/s故B正确;
t
C.由于静摩擦力提供向心力,最大的加速度约为a=μg=3m/s2故C错误;
D.圆周运动中,摩擦力的分力提供向心力,所以摩擦力不可能与运动的方向平行,故D错误。
故选B。
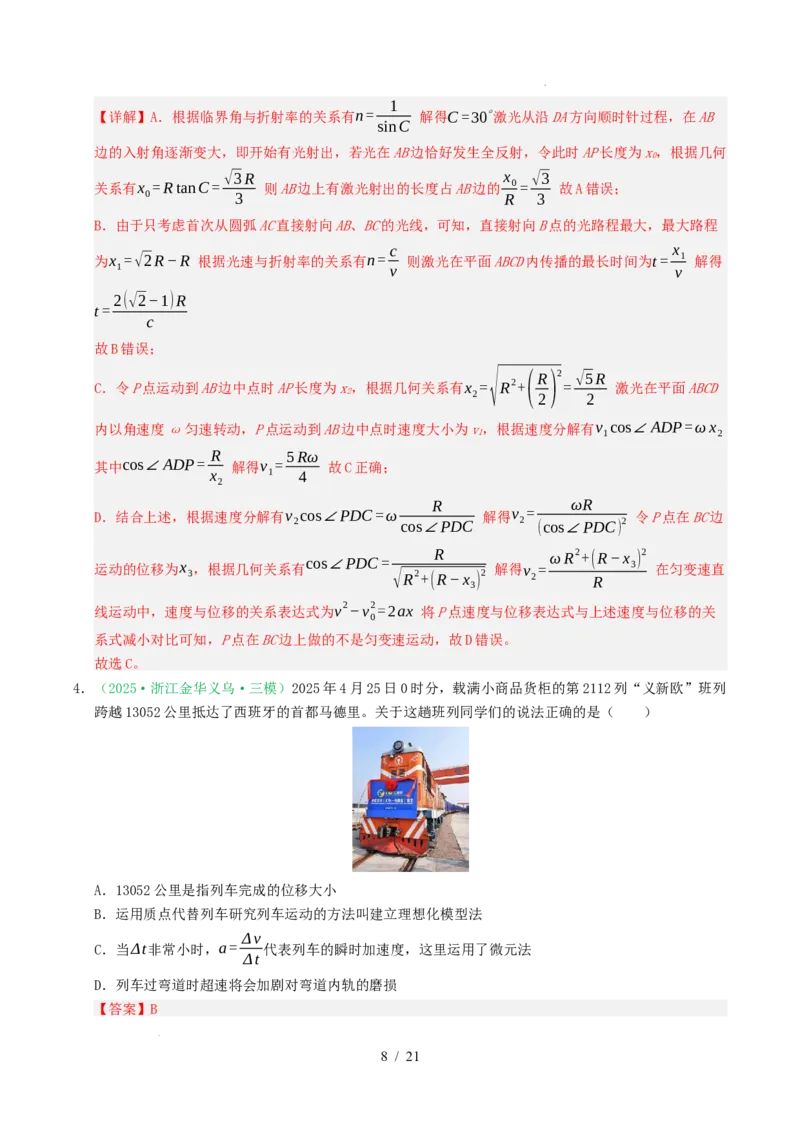
3.(2025·浙江北斗星盟·三模)如图所示,图中阴影部分ABC为一透明材料做成的柱形光学元件的横
1
截面,该种材料折射率n=2。AC为一半径为R的 圆弧,D为圆弧的圆心,ABCD构成正方形,在D处有
4
一激光,激光在平面ABCD内以角速度ω匀速转动,P为激光在AB、BC两边上的亮斑,已知光在真空
中的传播速度为c。若只考虑首次从圆弧AC直接射向AB、BC的光线。当激光从沿DA方向顺时针转到
DC方向的过程中,下列说法正确的是( )
1
A.AB边上有激光射出的长度占AB边的
2
(1+2√2)R
B.激光在平面ABCD内传播的最长时间为
C
5Rω
C.P点运动到AB边中点时速度大小为
4
D.P点在BC边上做匀变速运动
【答案】C
7 / 21
学科网(北京)股份有限公司1
【详解】A.根据临界角与折射率的关系有n= 解得C=30∘激光从沿DA方向顺时针过程,在AB
sinC
边的入射角逐渐变大,即开始有光射出,若光在AB边恰好发生全反射,令此时AP长度为x,根据几何
0
√3R x √3
关系有x =RtanC= 则AB边上有激光射出的长度占AB边的 0= 故A错误;
0 3 R 3
B.由于只考虑首次从圆弧AC直接射向AB、BC的光线,可知,直接射向B点的光路程最大,最大路程
c x
为x =√2R−R 根据光速与折射率的关系有n= 则激光在平面ABCD内传播的最长时间为t= 1 解得
1 v v
2(√2−1)R
t=
c
故B错误;
C.令P点运动到AB边中点时AP长度为x,根据几何关系有x =
√
R2+
(R) 2
=
√5R
激光在平面ABCD
2 2 2 2
内以角速度ω匀速转动,P点运动到AB边中点时速度大小为v,根据速度分解有v cos∠ADP=ωx
1 1 2
R 5Rω
其中cos∠ADP= 解得v = 故C正确;
x 1 4
2
R ωR
D.结合上述,根据速度分解有v cos∠PDC=ω 解得v = 令P点在BC边
2 cos∠PDC 2 (cos∠PDC) 2
运动的位移为x ,根据几何关系有
cos∠PDC=
R
解得v =
ωR2+(R−x
3
)
2
在匀变速直
3 √R2+(R−x ) 2 2 R
3
线运动中,速度与位移的关系表达式为v2−v2=2ax
将P点速度与位移表达式与上述速度与位移的关
0
系式减小对比可知,P点在BC边上做的不是匀变速运动,故D错误。
故选C。
4.(2025·浙江金华义乌·三模)2025年4月25日0时分,载满小商品货柜的第2112列“义新欧”班列
跨越13052公里抵达了西班牙的首都马德里。关于这趟班列同学们的说法正确的是( )
A.13052公里是指列车完成的位移大小
B.运用质点代替列车研究列车运动的方法叫建立理想化模型法
Δv
C.当Δt非常小时,a= 代表列车的瞬时加速度,这里运用了微元法
Δt
D.列车过弯道时超速将会加剧对弯道内轨的磨损
【答案】B
8 / 21
学科网(北京)股份有限公司【详解】A.3052公里是指列车完成的路程,故A错误;
B.运用质点代替列车研究列车运动的方法叫建立理想化模型法,故B正确;
Δv
C.当Δt非常小时,a= 代表列车的瞬时加速度,这里运用了极限法,故C错误;
Δt
D.列车过弯道时超速,列车有离心运动趋势,将会加剧对弯道外轨的磨损,故D错误。
故选B。
5.(24-25高三下·浙江诸暨·二模)如图所示,两根长均为L的轻绳a和b固定在质量为m的小球上,
轻绳a的另一端固定在天花板上的A点,AB为竖直线,轻绳b的另一端系有轻质小环c,小环c套在竖
直光滑杆CD上。情境一:竖直杆CD缓慢右移,使轻绳a与竖直方向夹角为37°;情境二:竖直杆CD
绕竖直线AB做匀速圆周运动,使轻绳a与竖直方向夹角为37°。已知小球可看作质点,
sin37°=0.6。下列说法正确的是( )
A.在情境一中,轻绳a对小球的拉力大小为mg
4
B.在情境一中,轻绳b对小球的拉力大小为 mg
3
C.在情境二中,转动转速越大,轻绳a对小球的拉力越大
1√5g
D.在情境二中,转动角速度为 ,轻绳b对小球的拉力为0
2 L
【答案】D
【详解】AB.对小球受力分析,根据平衡条件可得F cos37°=mg,F =F sin37°解得
a b a
mg 5 3
F = = mg,F = mgAB错误;
a cos37° 4 b 4
CD.在情境二中,当绳b中无拉力,小球受到绳a的拉力及小球的重力,二者的合力为其圆周运动提供
mg 5
向心力,竖直方向上受力平衡,结合上述分析可知F = = mg,F sin37°=mω2Lsin37°
a cos37° 4 a
1√5g 1√5g 1√5g
解得ω= 即当角速度ω≤ 时,绳子a的拉力不变;当ω> 绳子b 有拉力时,根据
2 L 2 L 2 L
牛顿第二定律则有F sin37°−F =mω2Lsin37° 随着转动的角速度增大,绳子a的拉力随之增大,
a b
1√5g 1√5g
综上所述,当ω≤ 时,绳a的拉力随角速度的增大而保持不变,当ω> 时,绳a的拉力随
2 L 2 L
角速度的增大而增大,C错误,D正确。
9 / 21
学科网(北京)股份有限公司故选D。
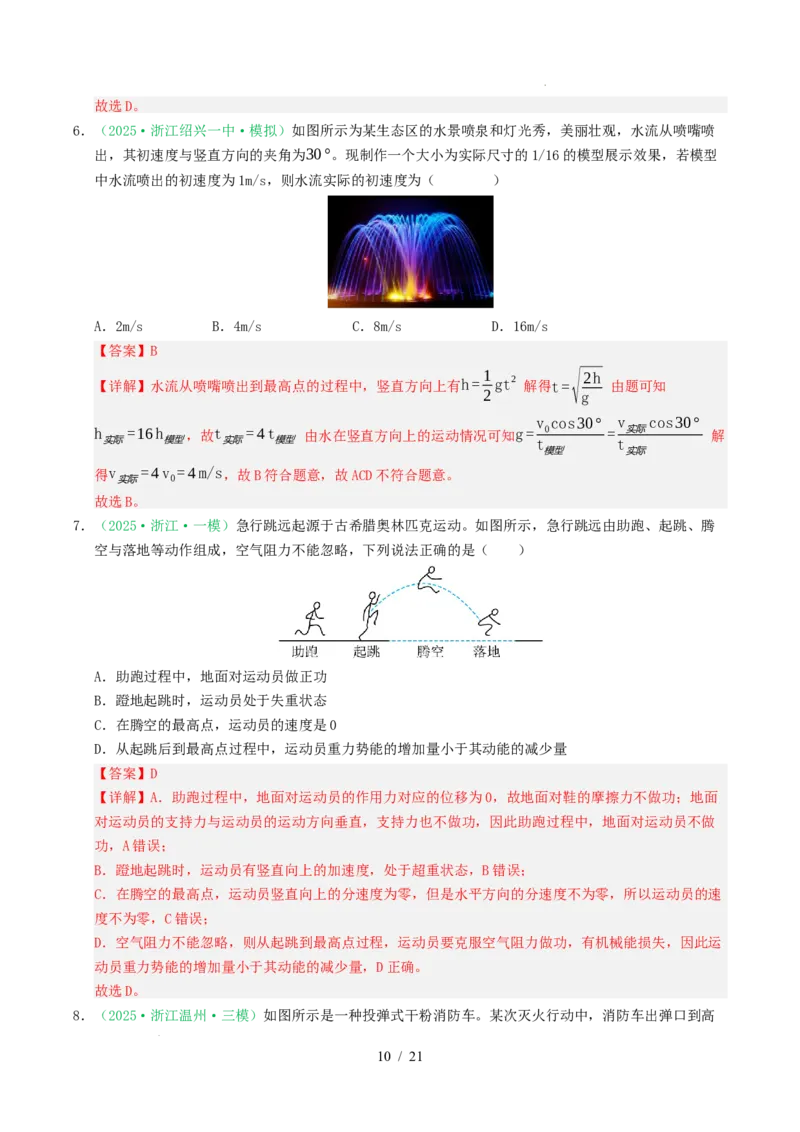
6.(2025·浙江绍兴一中·模拟)如图所示为某生态区的水景喷泉和灯光秀,美丽壮观,水流从喷嘴喷
出,其初速度与竖直方向的夹角为30°。现制作一个大小为实际尺寸的1/16的模型展示效果,若模型
中水流喷出的初速度为1m/s,则水流实际的初速度为( )
A.2m/s B.4m/s C.8m/s D.16m/s
【答案】B
【详解】水流从喷嘴喷出到最高点的过程中,竖直方向上有h=
1
gt2 解得t=
√2h
由题可知
2 g
v cos30° v cos30°
h =16h ,故t =4t 由水在竖直方向上的运动情况可知g= 0 = 实际 解
实际 模型 实际 模型 t t
模型 实际
得v =4v =4m/s,故B符合题意,故ACD不符合题意。
实际 0
故选B。
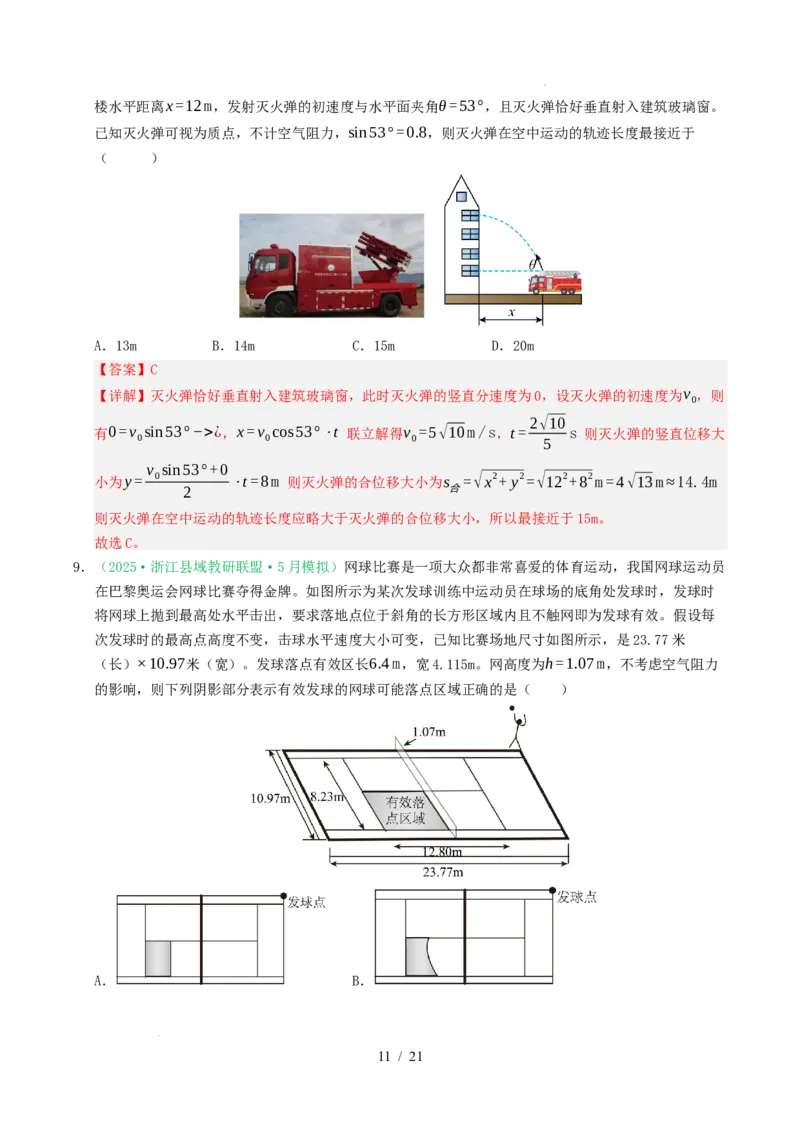
7.(2025·浙江·一模)急行跳远起源于古希腊奥林匹克运动。如图所示,急行跳远由助跑、起跳、腾
空与落地等动作组成,空气阻力不能忽略,下列说法正确的是( )
A.助跑过程中,地面对运动员做正功
B.蹬地起跳时,运动员处于失重状态
C.在腾空的最高点,运动员的速度是0
D.从起跳后到最高点过程中,运动员重力势能的增加量小于其动能的减少量
【答案】D
【详解】A.助跑过程中,地面对运动员的作用力对应的位移为0,故地面对鞋的摩擦力不做功;地面
对运动员的支持力与运动员的运动方向垂直,支持力也不做功,因此助跑过程中,地面对运动员不做
功,A错误;
B.蹬地起跳时,运动员有竖直向上的加速度,处于超重状态,B错误;
C.在腾空的最高点,运动员竖直向上的分速度为零,但是水平方向的分速度不为零,所以运动员的速
度不为零,C错误;
D.空气阻力不能忽略,则从起跳到最高点过程,运动员要克服空气阻力做功,有机械能损失,因此运
动员重力势能的增加量小于其动能的减少量,D正确。
故选D。
8.(2025·浙江温州·三模)如图所示是一种投弹式干粉消防车。某次灭火行动中,消防车出弹口到高
10 / 21
学科网(北京)股份有限公司楼水平距离x=12m,发射灭火弹的初速度与水平面夹角θ=53°,且灭火弹恰好垂直射入建筑玻璃窗。
已知灭火弹可视为质点,不计空气阻力,sin53°=0.8,则灭火弹在空中运动的轨迹长度最接近于
( )
A.13m B.14m C.15m D.20m
【答案】C
【详解】灭火弹恰好垂直射入建筑玻璃窗,此时灭火弹的竖直分速度为0,设灭火弹的初速度为v ,则
0
2√10
有0=v sin53°−>¿,x=v cos53°⋅t 联立解得v =5√10m/s,t= s 则灭火弹的竖直位移大
0 0 0 5
v sin53°+0
小为y= 0 ⋅t=8m 则灭火弹的合位移大小为s =√x2+ y2=√122+82m=4√13m≈14.4m
2 合
则灭火弹在空中运动的轨迹长度应略大于灭火弹的合位移大小,所以最接近于15m。
故选C。
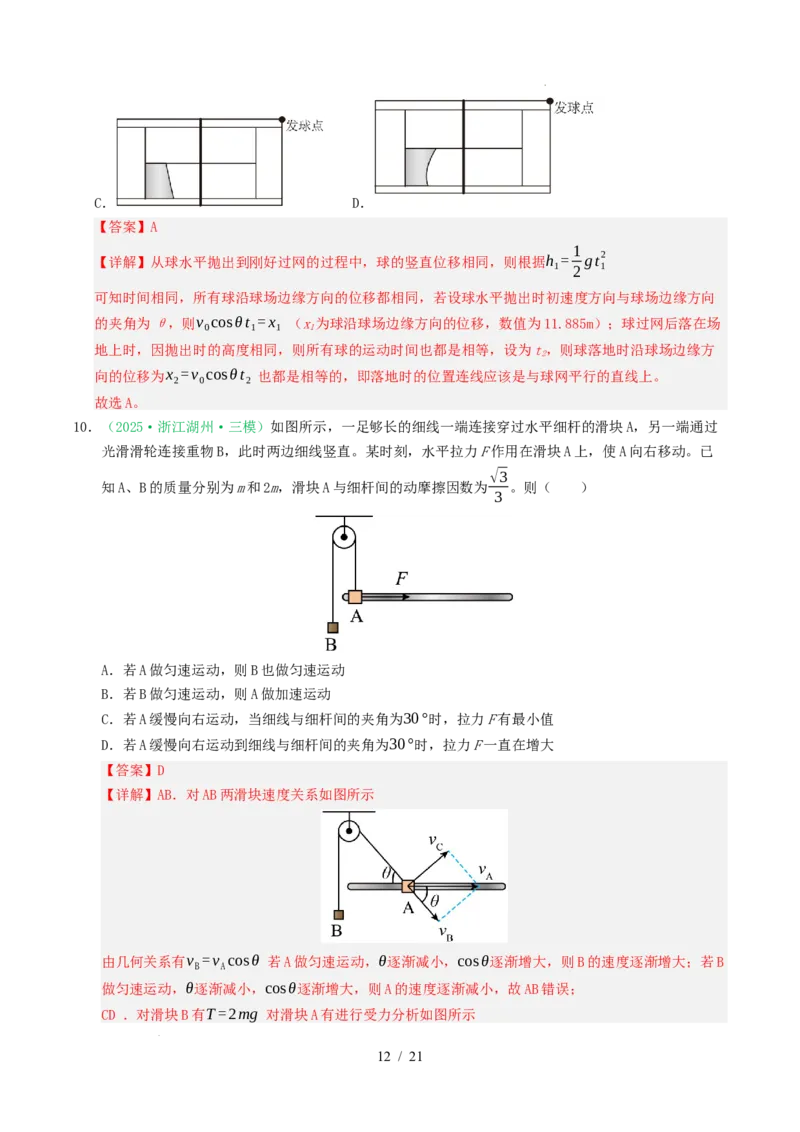
9.(2025·浙江县域教研联盟·5月模拟)网球比赛是一项大众都非常喜爱的体育运动,我国网球运动员
在巴黎奥运会网球比赛夺得金牌。如图所示为某次发球训练中运动员在球场的底角处发球时,发球时
将网球上抛到最高处水平击出,要求落地点位于斜角的长方形区域内且不触网即为发球有效。假设每
次发球时的最高点高度不变,击球水平速度大小可变,已知比赛场地尺寸如图所示,是23.77米
(长)×10.97米(宽)。发球落点有效区长6.4m,宽4.115m。网高度为h=1.07m,不考虑空气阻力
的影响,则下列阴影部分表示有效发球的网球可能落点区域正确的是( )
A. B.
11 / 21
学科网(北京)股份有限公司C. D.
【答案】A
1
【详解】从球水平抛出到刚好过网的过程中,球的竖直位移相同,则根据h = gt2
1 2 1
可知时间相同,所有球沿球场边缘方向的位移都相同,若设球水平抛出时初速度方向与球场边缘方向
的夹角为θ,则v cosθt =x (x为球沿球场边缘方向的位移,数值为11.885m);球过网后落在场
0 1 1 1
地上时,因抛出时的高度相同,则所有球的运动时间也都是相等,设为t,则球落地时沿球场边缘方
2
向的位移为x =v cosθt 也都是相等的,即落地时的位置连线应该是与球网平行的直线上。
2 0 2
故选A。
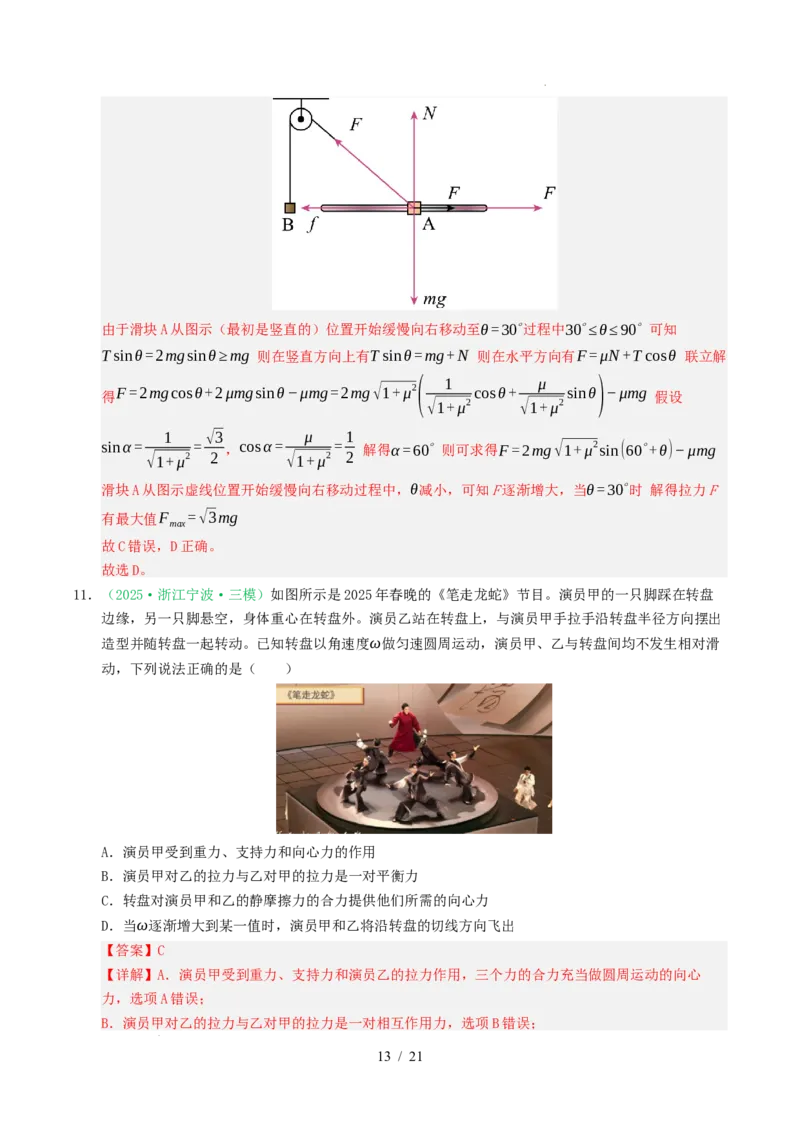
10.(2025·浙江湖州·三模)如图所示,一足够长的细线一端连接穿过水平细杆的滑块A,另一端通过
光滑滑轮连接重物B,此时两边细线竖直。某时刻,水平拉力F作用在滑块A上,使A向右移动。已
√3
知A、B的质量分别为m和2m,滑块A与细杆间的动摩擦因数为 。则( )
3
A.若A做匀速运动,则B也做匀速运动
B.若B做匀速运动,则A做加速运动
C.若A缓慢向右运动,当细线与细杆间的夹角为30°时,拉力F有最小值
D.若A缓慢向右运动到细线与细杆间的夹角为30°时,拉力F一直在增大
【答案】D
【详解】AB.对AB两滑块速度关系如图所示
由几何关系有v =v cosθ 若A做匀速运动,θ逐渐减小,cosθ逐渐增大,则B的速度逐渐增大;若B
B A
做匀速运动,θ逐渐减小,cosθ逐渐增大,则A的速度逐渐减小,故AB错误;
CD .对滑块B有T=2mg 对滑块A有进行受力分析如图所示
12 / 21
学科网(北京)股份有限公司由于滑块A从图示(最初是竖直的)位置开始缓慢向右移动至θ=30∘过程中30∘≤θ≤90∘ 可知
Tsinθ=2mgsinθ≥mg 则在竖直方向上有Tsinθ=mg+N 则在水平方向有F=μN+Tcosθ 联立解
1 μ
得F=2mgcosθ+2μmgsinθ−μmg=2mg√1+μ2( cosθ+ sinθ ) −μmg 假设
√1+μ2 √1+μ2
1 √3 μ 1
sinα= = ,cosα= = 解得α=60∘ 则可求得F=2mg√1+μ2sin(60∘+θ)−μmg
√1+μ2 2 √1+μ2 2
滑块A从图示虚线位置开始缓慢向右移动过程中,θ减小,可知F逐渐增大,当θ=30∘时 解得拉力F
有最大值F =√3mg
max
故C错误,D正确。
故选D。
11.(2025·浙江宁波·三模)如图所示是2025年春晚的《笔走龙蛇》节目。演员甲的一只脚踩在转盘
边缘,另一只脚悬空,身体重心在转盘外。演员乙站在转盘上,与演员甲手拉手沿转盘半径方向摆出
造型并随转盘一起转动。已知转盘以角速度ω做匀速圆周运动,演员甲、乙与转盘间均不发生相对滑
动,下列说法正确的是( )
A.演员甲受到重力、支持力和向心力的作用
B.演员甲对乙的拉力与乙对甲的拉力是一对平衡力
C.转盘对演员甲和乙的静摩擦力的合力提供他们所需的向心力
D.当ω逐渐增大到某一值时,演员甲和乙将沿转盘的切线方向飞出
【答案】C
【详解】A.演员甲受到重力、支持力和演员乙的拉力作用,三个力的合力充当做圆周运动的向心
力,选项A错误;
B.演员甲对乙的拉力与乙对甲的拉力是一对相互作用力,选项B错误;
13 / 21
学科网(北京)股份有限公司C.演员甲和乙在轮盘提供的静摩擦力作用下做匀速圆周运动,静摩擦力的合力提供他们做匀速圆周
运动所需的向心力,故C正确;
D.ω增大时,演员甲和乙所需的向心力增大,转盘对演员甲和乙的静摩擦力增大,静摩擦力达到最
大时,ω达到最大值。ω继续增大,演员甲和乙将沿转盘的半径方向发生侧滑,故D错误。
故选C。
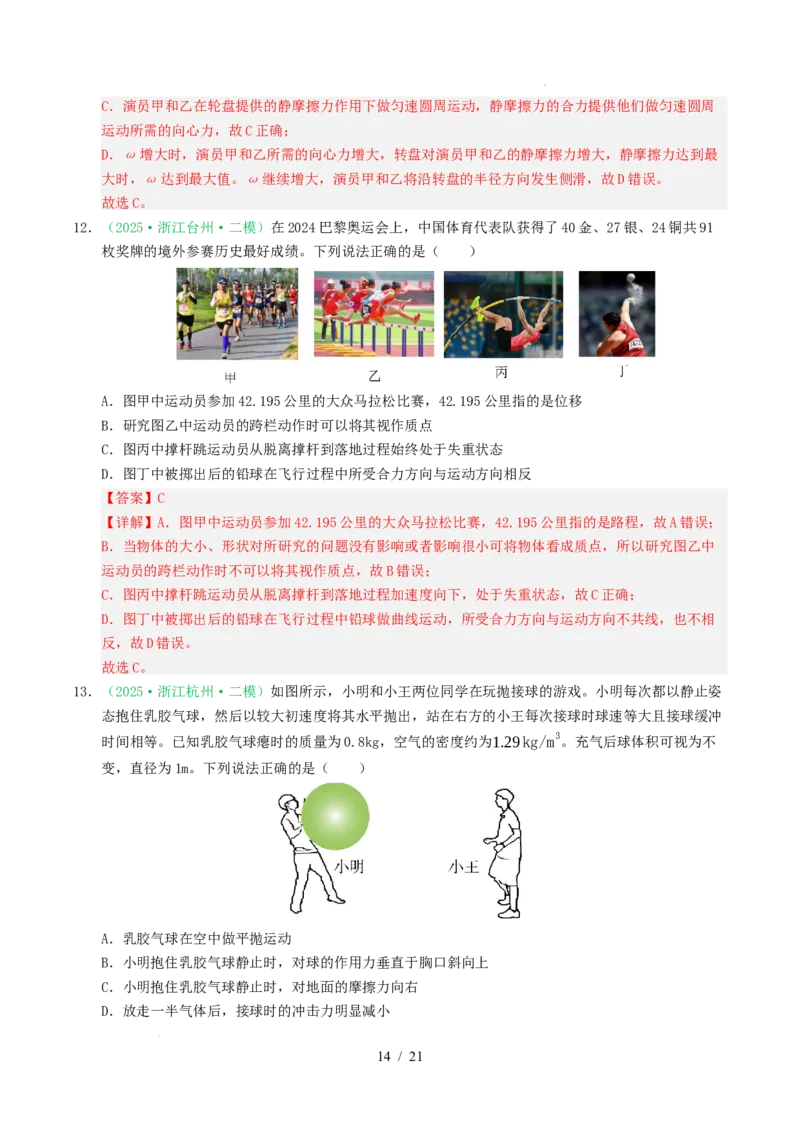
12.(2025·浙江台州·二模)在2024巴黎奥运会上,中国体育代表队获得了40金、27银、24铜共91
枚奖牌的境外参赛历史最好成绩。下列说法正确的是( )
A.图甲中运动员参加42.195公里的大众马拉松比赛,42.195公里指的是位移
B.研究图乙中运动员的跨栏动作时可以将其视作质点
C.图丙中撑杆跳运动员从脱离撑杆到落地过程始终处于失重状态
D.图丁中被掷出后的铅球在飞行过程中所受合力方向与运动方向相反
【答案】C
【详解】A.图甲中运动员参加42.195公里的大众马拉松比赛,42.195公里指的是路程,故A错误;
B.当物体的大小、形状对所研究的问题没有影响或者影响很小可将物体看成质点,所以研究图乙中
运动员的跨栏动作时不可以将其视作质点,故B错误;
C.图丙中撑杆跳运动员从脱离撑杆到落地过程加速度向下,处于失重状态,故C正确;
D.图丁中被掷出后的铅球在飞行过程中铅球做曲线运动,所受合力方向与运动方向不共线,也不相
反,故D错误。
故选C。
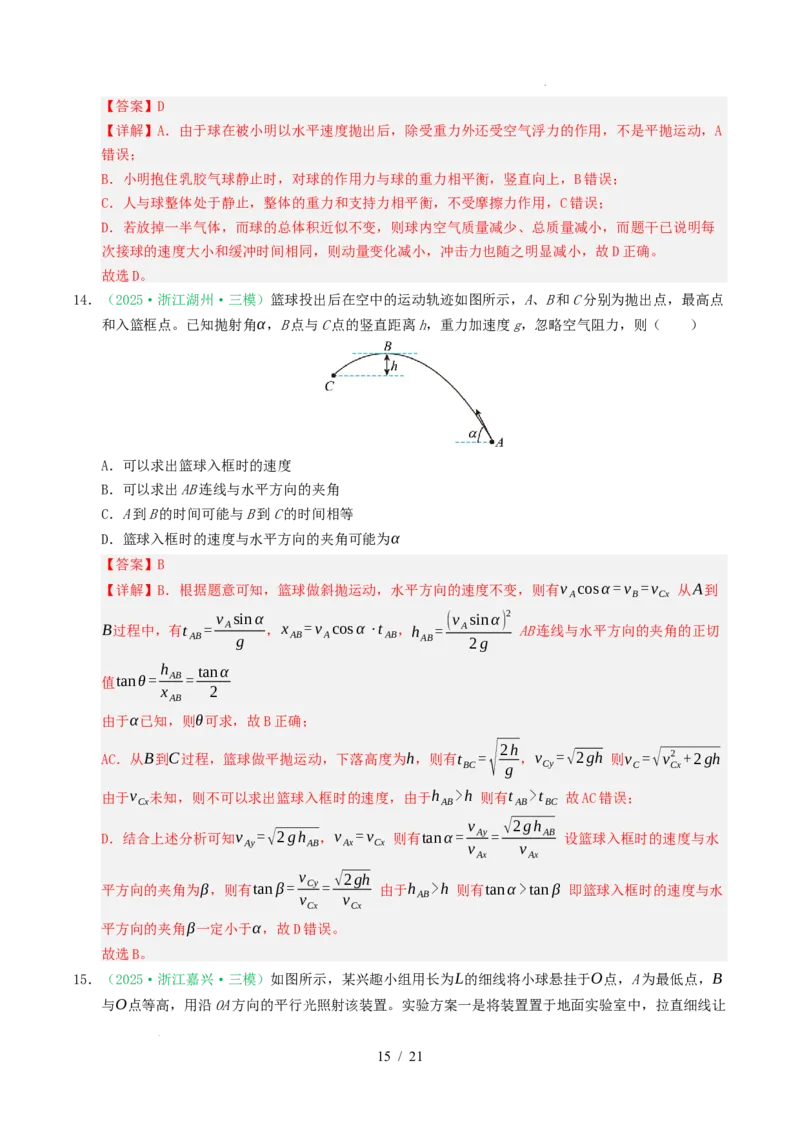
13.(2025·浙江杭州·二模)如图所示,小明和小王两位同学在玩抛接球的游戏。小明每次都以静止姿
态抱住乳胶气球,然后以较大初速度将其水平抛出,站在右方的小王每次接球时球速等大且接球缓冲
时间相等。已知乳胶气球瘪时的质量为0.8kg,空气的密度约为1.29kg/m3。充气后球体积可视为不
变,直径为1m。下列说法正确的是( )
A.乳胶气球在空中做平抛运动
B.小明抱住乳胶气球静止时,对球的作用力垂直于胸口斜向上
C.小明抱住乳胶气球静止时,对地面的摩擦力向右
D.放走一半气体后,接球时的冲击力明显减小
14 / 21
学科网(北京)股份有限公司【答案】D
【详解】A.由于球在被小明以水平速度抛出后,除受重力外还受空气浮力的作用,不是平抛运动,A
错误;
B.小明抱住乳胶气球静止时,对球的作用力与球的重力相平衡,竖直向上,B错误;
C.人与球整体处于静止,整体的重力和支持力相平衡,不受摩擦力作用,C错误;
D.若放掉一半气体,而球的总体积近似不变,则球内空气质量减少、总质量减小,而题干已说明每
次接球的速度大小和缓冲时间相同,则动量变化减小,冲击力也随之明显减小,故D正确。
故选D。
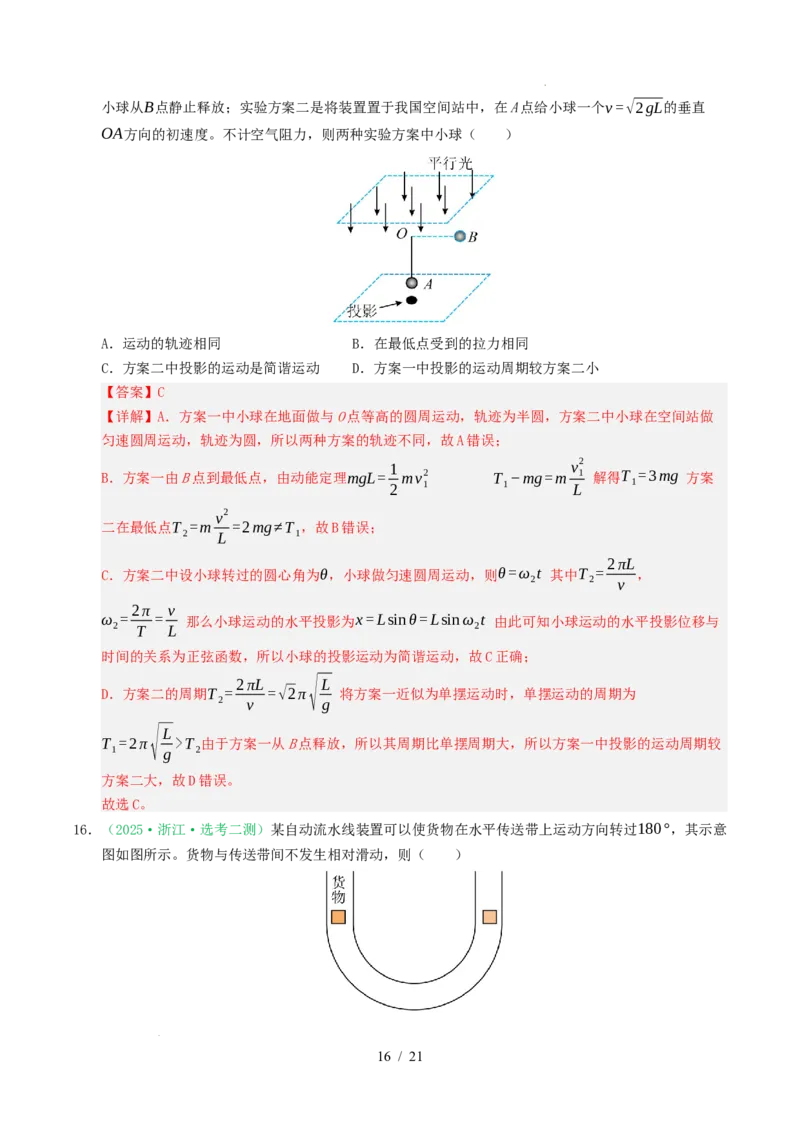
14.(2025·浙江湖州·三模)篮球投出后在空中的运动轨迹如图所示,A、B和C分别为抛出点,最高点
和入篮框点。已知抛射角α,B点与C点的竖直距离h,重力加速度g,忽略空气阻力,则( )
A.可以求出篮球入框时的速度
B.可以求出AB连线与水平方向的夹角
C.A到B的时间可能与B到C的时间相等
D.篮球入框时的速度与水平方向的夹角可能为α
【答案】B
【详解】B.根据题意可知,篮球做斜抛运动,水平方向的速度不变,则有v cosα=v =v 从A到
A B Cx
v sinα (v sinα) 2
B过程中,有t = A ,x =v cosα⋅t ,h = A AB连线与水平方向的夹角的正切
AB g AB A AB AB 2g
h tanα
值tanθ= AB =
x 2
AB
由于α已知,则θ可求,故B正确;
√2h
AC.从B到C过程,篮球做平抛运动,下落高度为h,则有t = ,v =√2gh 则v =√v2 +2gh
BC g Cy C Cx
由于v 未知,则不可以求出篮球入框时的速度,由于h >h 则有t >t 故AC错误;
Cx AB AB BC
v √2gh
D.结合上述分析可知v =√2gh ,v =v 则有tanα= Ay = AB 设篮球入框时的速度与水
Ay AB Ax Cx v v
Ax Ax
v √2gh
平方向的夹角为β,则有tanβ= Cy = 由于h >h 则有tanα>tanβ 即篮球入框时的速度与水
v v AB
Cx Cx
平方向的夹角β一定小于α,故D错误。
故选B。
15.(2025·浙江嘉兴·三模)如图所示,某兴趣小组用长为L的细线将小球悬挂于O点,A为最低点,B
与O点等高,用沿OA方向的平行光照射该装置。实验方案一是将装置置于地面实验室中,拉直细线让
15 / 21
学科网(北京)股份有限公司小球从B点静止释放;实验方案二是将装置置于我国空间站中,在A点给小球一个v=√2gL的垂直
OA方向的初速度。不计空气阻力,则两种实验方案中小球( )
A.运动的轨迹相同 B.在最低点受到的拉力相同
C.方案二中投影的运动是简谐运动 D.方案一中投影的运动周期较方案二小
【答案】C
【详解】A.方案一中小球在地面做与O点等高的圆周运动,轨迹为半圆,方案二中小球在空间站做
匀速圆周运动,轨迹为圆,所以两种方案的轨迹不同,故A错误;
1
v2
B.方案一由B点到最低点,由动能定理mgL= mv2 T −mg=m 1 解得T =3mg 方案
2 1 1 L 1
v2
二在最低点T =m =2mg≠T ,故B错误;
2 L 1
2πL
C.方案二中设小球转过的圆心角为θ,小球做匀速圆周运动,则θ=ω t 其中T = ,
2 2 v
2π v
ω = = 那么小球运动的水平投影为x=Lsinθ=Lsinω t 由此可知小球运动的水平投影位移与
2 T L 2
时间的关系为正弦函数,所以小球的投影运动为简谐运动,故C正确;
2πL √L
D.方案二的周期T = =√2π 将方案一近似为单摆运动时,单摆运动的周期为
2 v g
√L
T =2π >T 由于方案一从B点释放,所以其周期比单摆周期大,所以方案一中投影的运动周期较
1 g 2
方案二大,故D错误。
故选C。
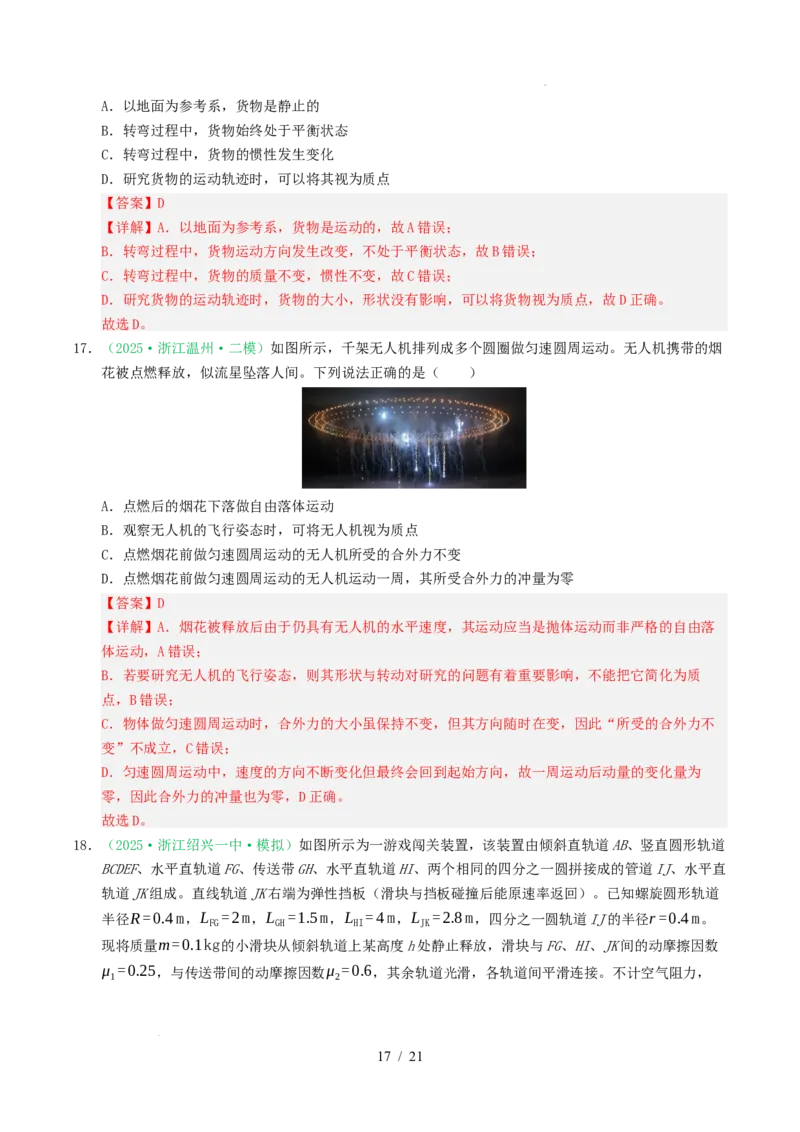
16.(2025·浙江·选考二测)某自动流水线装置可以使货物在水平传送带上运动方向转过180°,其示意
图如图所示。货物与传送带间不发生相对滑动,则( )
16 / 21
学科网(北京)股份有限公司A.以地面为参考系,货物是静止的
B.转弯过程中,货物始终处于平衡状态
C.转弯过程中,货物的惯性发生变化
D.研究货物的运动轨迹时,可以将其视为质点
【答案】D
【详解】A.以地面为参考系,货物是运动的,故A错误;
B.转弯过程中,货物运动方向发生改变,不处于平衡状态,故B错误;
C.转弯过程中,货物的质量不变,惯性不变,故C错误;
D.研究货物的运动轨迹时,货物的大小,形状没有影响,可以将货物视为质点,故D正确。
故选D。
17.(2025·浙江温州·二模)如图所示,千架无人机排列成多个圆圈做匀速圆周运动。无人机携带的烟
花被点燃释放,似流星坠落人间。下列说法正确的是( )
A.点燃后的烟花下落做自由落体运动
B.观察无人机的飞行姿态时,可将无人机视为质点
C.点燃烟花前做匀速圆周运动的无人机所受的合外力不变
D.点燃烟花前做匀速圆周运动的无人机运动一周,其所受合外力的冲量为零
【答案】D
【详解】A.烟花被释放后由于仍具有无人机的水平速度,其运动应当是抛体运动而非严格的自由落
体运动,A错误;
B.若要研究无人机的飞行姿态,则其形状与转动对研究的问题有着重要影响,不能把它简化为质
点,B错误;
C.物体做匀速圆周运动时,合外力的大小虽保持不变,但其方向随时在变,因此“所受的合外力不
变”不成立,C错误;
D.匀速圆周运动中,速度的方向不断变化但最终会回到起始方向,故一周运动后动量的变化量为
零,因此合外力的冲量也为零,D正确。
故选D。
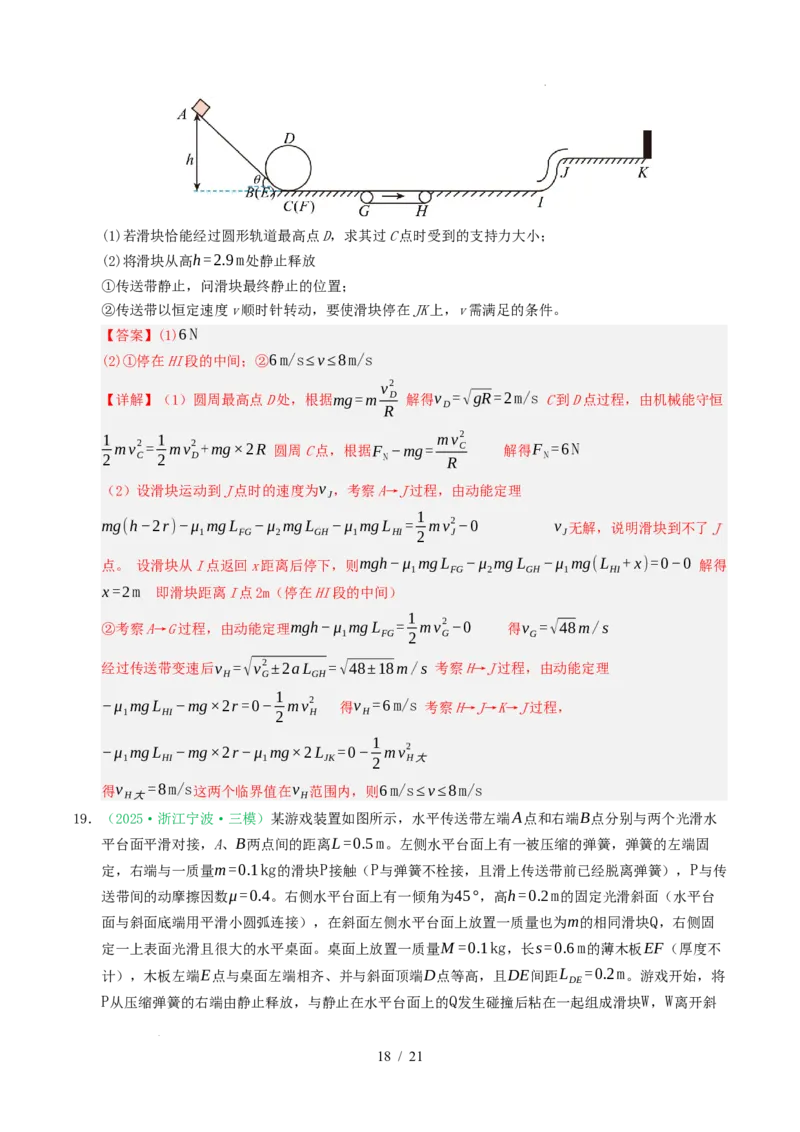
18.(2025·浙江绍兴一中·模拟)如图所示为一游戏闯关装置,该装置由倾斜直轨道AB、竖直圆形轨道
BCDEF、水平直轨道FG、传送带GH、水平直轨道HI、两个相同的四分之一圆拼接成的管道IJ、水平直
轨道JK组成。直线轨道JK右端为弹性挡板(滑块与挡板碰撞后能原速率返回)。已知螺旋圆形轨道
半径R=0.4m,L =2m,L =1.5m,L =4m,L =2.8m,四分之一圆轨道IJ的半径r=0.4m。
FG GH HI JK
现将质量m=0.1kg的小滑块从倾斜轨道上某高度h处静止释放,滑块与FG、HI、JK间的动摩擦因数
μ =0.25,与传送带间的动摩擦因数μ =0.6,其余轨道光滑,各轨道间平滑连接。不计空气阻力,
1 2
17 / 21
学科网(北京)股份有限公司(1)若滑块恰能经过圆形轨道最高点D,求其过C点时受到的支持力大小;
(2)将滑块从高h=2.9m处静止释放
①传送带静止,问滑块最终静止的位置;
②传送带以恒定速度v顺时针转动,要使滑块停在JK上,v需满足的条件。
【答案】(1)6N
(2)①停在HI段的中间;②6m/s≤v≤8m/s
v2
【详解】(1)圆周最高点D处,根据mg=m D 解得v =√gR=2m/s C到D点过程,由机械能守恒
D
R
1 1 mv2
mv2 = mv2 +mg×2R 圆周C点,根据F −mg= C 解得F =6N
2 C 2 D N R N
(2)设滑块运动到J点时的速度为v ,考察A→J过程,由动能定理
J
1
mg(h−2r)−μ mgL −μ mgL −μ mgL = mv2−0 v 无解,说明滑块到不了J
1 FG 2 GH 1 HI 2 J J
点。 设滑块从I点返回x距离后停下,则mgh−μ mgL −μ mgL −μ mg(L +x)=0−0 解得
1 FG 2 GH 1 HI
x=2m 即滑块距离I点2m(停在HI段的中间)
1
②考察A→G过程,由动能定理mgh−μ mgL = mv2−0 得v =√48m/s
1 FG 2 G G
经过传送带变速后v =√v2 ±2aL =√48±18m/s 考察H→J过程,由动能定理
H G GH
1
−μ mgL −mg×2r=0− mv2 得v =6m/s 考察H→J→K→J过程,
1 HI 2 H H
1
−μ mgL −mg×2r−μ mg×2L =0− mv2
1 HI 1 JK 2 H大
得v =8m/s这两个临界值在v 范围内,则6m/s≤v≤8m/s
H大 H
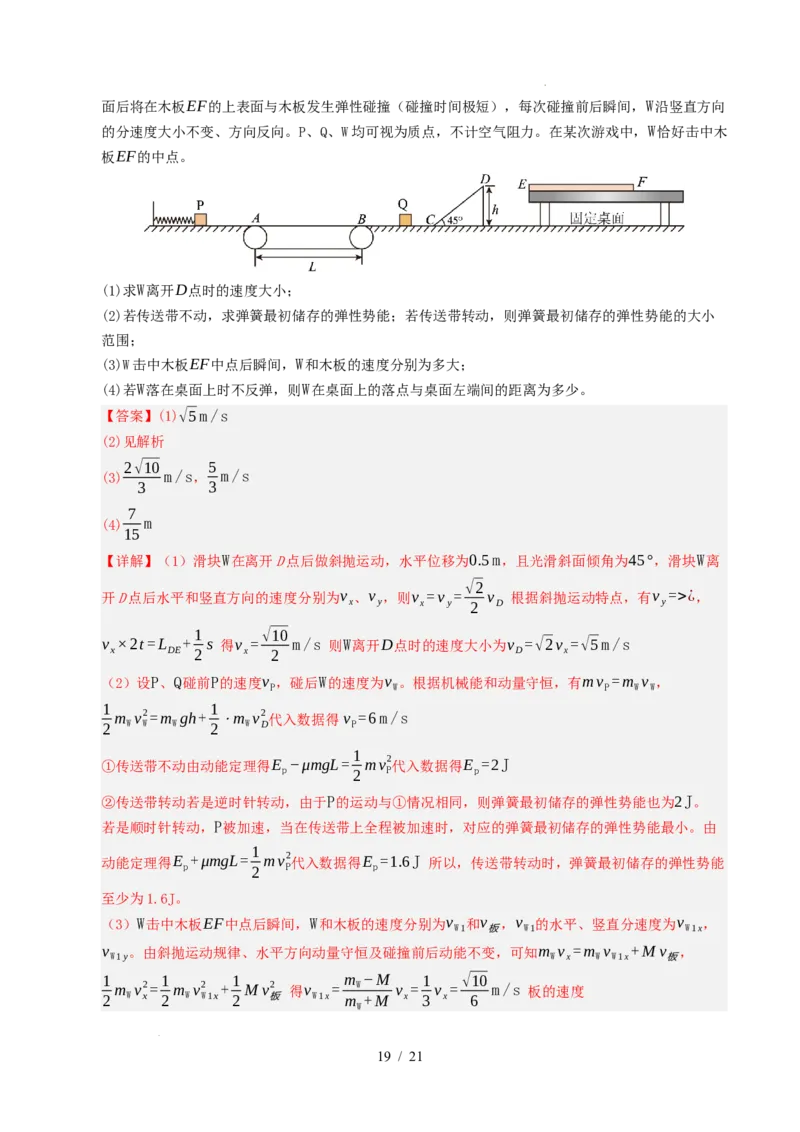
19.(2025·浙江宁波·三模)某游戏装置如图所示,水平传送带左端A点和右端B点分别与两个光滑水
平台面平滑对接,A、B两点间的距离L=0.5m。左侧水平台面上有一被压缩的弹簧,弹簧的左端固
定,右端与一质量m=0.1kg的滑块P接触(P与弹簧不栓接,且滑上传送带前已经脱离弹簧),P与传
送带间的动摩擦因数μ=0.4。右侧水平台面上有一倾角为45°,高h=0.2m的固定光滑斜面(水平台
面与斜面底端用平滑小圆弧连接),在斜面左侧水平台面上放置一质量也为m的相同滑块Q,右侧固
定一上表面光滑且很大的水平桌面。桌面上放置一质量M=0.1kg,长s=0.6m的薄木板EF(厚度不
计),木板左端E点与桌面左端相齐、并与斜面顶端D点等高,且DE间距L =0.2m。游戏开始,将
DE
P从压缩弹簧的右端由静止释放,与静止在水平台面上的Q发生碰撞后粘在一起组成滑块W,W离开斜
18 / 21
学科网(北京)股份有限公司面后将在木板EF的上表面与木板发生弹性碰撞(碰撞时间极短),每次碰撞前后瞬间,W沿竖直方向
的分速度大小不变、方向反向。P、Q、W均可视为质点,不计空气阻力。在某次游戏中,W恰好击中木
板EF的中点。
(1)求W离开D点时的速度大小;
(2)若传送带不动,求弹簧最初储存的弹性势能;若传送带转动,则弹簧最初储存的弹性势能的大小
范围;
(3)W击中木板EF中点后瞬间,W和木板的速度分别为多大;
(4)若W落在桌面上时不反弹,则W在桌面上的落点与桌面左端间的距离为多少。
【答案】(1)√5m/s
(2)见解析
2√10 5
(3) m/s, m/s
3 3
7
(4) m
15
【详解】(1)滑块W在离开D点后做斜抛运动,水平位移为0.5m,且光滑斜面倾角为45°,滑块W离
√2
开D点后水平和竖直方向的速度分别为v 、v ,则v =v = v 根据斜抛运动特点,有v =>¿,
x y x y 2 D y
1 √10
v ×2t=L + s 得v = m/s 则W离开D点时的速度大小为v =√2v =√5m/s
x DE 2 x 2 D x
(2)设P、Q碰前P的速度v ,碰后W的速度为v 。根据机械能和动量守恒,有mv =m v ,
P W P W W
1 1
m v2=m gh+ ⋅m v2 代入数据得v =6m/s
2 W W W 2 W D P
1
①传送带不动由动能定理得E −μmgL= mv2 代入数据得E =2J
p 2 P p
②传送带转动若是逆时针转动,由于P的运动与①情况相同,则弹簧最初储存的弹性势能也为2J。
若是顺时针转动,P被加速,当在传送带上全程被加速时,对应的弹簧最初储存的弹性势能最小。由
1
动能定理得E +μmgL= mv2 代入数据得E =1.6J 所以,传送带转动时,弹簧最初储存的弹性势能
p 2 P p
至少为1.6J。
(3)W击中木板EF中点后瞬间,W和木板的速度分别为v 和v ,v 的水平、竖直分速度为v ,
W1 板 W1 W1x
v 。由斜抛运动规律、水平方向动量守恒及碰撞前后动能不变,可知m v =m v +Mv ,
W1y W x W W1x 板
1 1 1 m −M 1 √10
m v2= m v2 + Mv2 得v = W v = v = m/s 板的速度
2 W x 2 W W1x 2 板 W1x m +M x 3 x 6
W
19 / 21
学科网(北京)股份有限公司2m 4 2√10 5
v = W v = v = m/s W的速度为v =√v2+v2 = m/s
板 m +M x 3 x 3 W1 y W1x 3
W
v √10
(4)当滑块W落在木板中点碰后上升到最大高度的时间为t= y = s 则,滑块W与木板碰撞后反
g 20
4 1 1
弹再落到碰前高度时,与木板的水平位移差为 v ×2t− v ×2t=0.5m> s=0.3m落点距E点距
3 x 3 x 2
1 1 7
离为x= v ×2t+ s= m
3 x 2 15
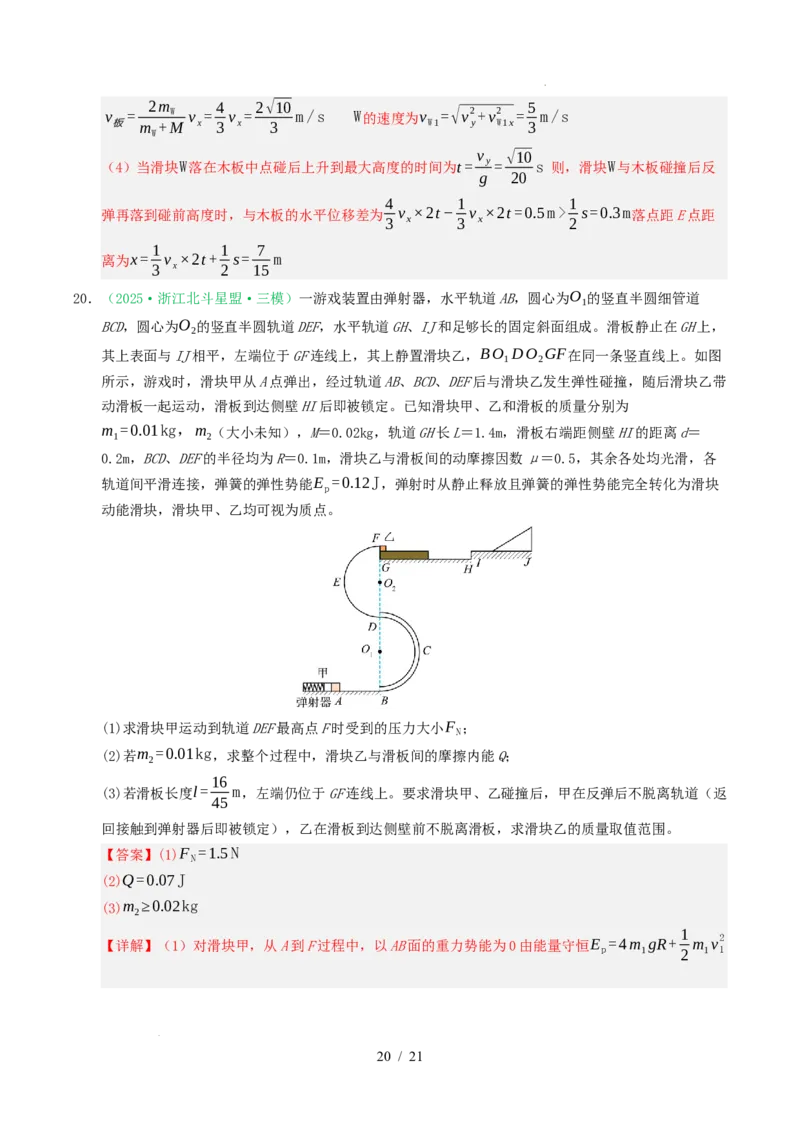
20.(2025·浙江北斗星盟·三模)一游戏装置由弹射器,水平轨道AB,圆心为O 的竖直半圆细管道
1
BCD,圆心为O 的竖直半圆轨道DEF,水平轨道GH、IJ和足够长的固定斜面组成。滑板静止在GH上,
2
其上表面与IJ相平,左端位于GF连线上,其上静置滑块乙,BO DO GF在同一条竖直线上。如图
1 2
所示,游戏时,滑块甲从A点弹出,经过轨道AB、BCD、DEF后与滑块乙发生弹性碰撞,随后滑块乙带
动滑板一起运动,滑板到达侧壁HI后即被锁定。已知滑块甲、乙和滑板的质量分别为
m =0.01kg,m (大小未知),M=0.02kg,轨道GH长L=1.4m,滑板右端距侧壁HI的距离d=
1 2
0.2m,BCD、DEF的半径均为R=0.1m,滑块乙与滑板间的动摩擦因数μ=0.5,其余各处均光滑,各
轨道间平滑连接,弹簧的弹性势能E =0.12J,弹射时从静止释放且弹簧的弹性势能完全转化为滑块
p
动能滑块,滑块甲、乙均可视为质点。
(1)求滑块甲运动到轨道DEF最高点F时受到的压力大小F ;
N
(2)若m =0.01kg,求整个过程中,滑块乙与滑板间的摩擦内能Q;
2
16
(3)若滑板长度l= m,左端仍位于GF连线上。要求滑块甲、乙碰撞后,甲在反弹后不脱离轨道(返
45
回接触到弹射器后即被锁定),乙在滑板到达侧壁前不脱离滑板,求滑块乙的质量取值范围。
【答案】(1)F =1.5N
N
(2)Q=0.07J
(3)m ≥0.02kg
2
1
【详解】(1)对滑块甲,从A到F过程中,以AB面的重力势能为0由能量守恒E =4m gR+ m v2
p 1 2 1 1
20 / 21
学科网(北京)股份有限公司v 2
得v=4m/s在F点,由F +m g=m 1 得F =1.5N
1 N 1 1 R N
(2)依题意经判断,滑块乙和滑板在达到共速前,滑板已到达侧壁并被锁定 对滑板,设滑板到达侧
1
壁HI时的速度为v由动能定理μm gd= Mv2−0 得v=1m/s 由于滑块甲、乙质量相等,故甲、
2 2 2 2 2
乙发生弹性碰撞时,交换速度,则碰后滑块乙的初速度为v=4m/s 对滑板和滑块乙,滑块乙到达侧
1
壁HI时的速度为v′ ,以水平向右为正 由动量守恒m v =m v′ +Mv 得v′ =2m/s 此过程,滑板
1 2 1 2 1 2 1
1 1 1
和滑块乙组成的系统摩擦内能为Q由能量守恒−Q = m v′ 2+ Mv2− m v2 得Q =0.05J 经分
1 1 2 2 1 2 2 2 2 1 1
析可知,此后滑块乙继续在滑板上滑动,经轨道IJ和斜面后,速度等大反向滑回滑板,最后停止在
1
滑板上,此过程中,滑板和滑块乙组成的系统摩擦内能为Q = m v′ 2=0.02J 整个过程中,
2 2 2 1
Q=Q +Q =0.07J
1 2
v2
(3)①若滑块甲、乙碰后,滑块甲返回时恰好不脱离轨道,在F点有m g=m 3 得v =1m/s,方
1 1 R 3
向水平向左 以水平向右为正,滑块甲、乙碰撞时 由动量守恒m v =−m v +m v 由能量守恒
1 1 1 3 2 4
1 1 1 1
m v2= m v2+ m v2 得m = kg,为滑块甲不脱离轨道时,滑块乙的最小质量。
2 1 1 2 1 3 2 2 4 2 60
1 1
②若碰后滑块乙恰好不脱离滑板,对滑块乙和滑板由能量守恒μm gl= m v2− (m +M)v2 由动
2 2 2 5 2 2 共
量守恒m v =(m +M)v 对滑块甲和滑块乙 由动量守恒m v =m v +m v 由能量守恒
2 5 2 共 1 1 1 6 2 5
1 1 1
m v2= m v2+ m v2 得m =0.02kg,此时滑板右端未到达侧壁,为滑块乙在滑板到达侧壁前不
2 1 1 2 1 6 2 2 5 2
脱离滑板的最小质量。比较①②后,知滑块乙的质量取值范围为m ≥0.02kg。
2
21 / 21
学科网(北京)股份有限公司

