
文档内容
第37卷第03期 煤 炭 技 术 Vol.37No.03
2018年 03月 Coal Technology Mar.2018
doi:10.13301/j.cnki.ct.2018.03.080
谐波减速器的柔轮应力及疲劳强度分析 *
张功学, 马 车
(陕西科技大学 机电工程学院, 西安 710021)
摘 要: 从理论的角度对谐波齿轮减速器的柔轮进行应力分析, 依据光滑圆柱壳体模型得出
沿母线方向的正应力、周向正应力、剪应力以及疲劳强度。 在实验分析中,先通过ADAMS软件建立
刚-柔混合模型,进行刚-柔耦合仿真验证了模型的正确性之后,通过 ANSYS Workbench 软件对柔
轮进行动力学分析, 得出了柔轮最易发生疲劳的位置及其疲劳安全系数。 采用协同仿真分析法表
明,计算机分析数值与理论计算数值非常接近,从而验证了理论分析的正确性。
关键词: 谐波减速器; 柔轮; 应力; 疲劳强度; 协同仿真分析法
中图分类号: TH132.43 文献标志码: A 文章编号: 1008-8725(2018)03-0209-04
Analysis of Flexible Gear Stress and Fatigue Strength of Harmonic
Reducer
ZHANGGong-xue,MAChe
(CollegeofMechanicalandElectricalEngineering,ShaanxiUniversityofScienceandTechnology,Xi′an710021,China)
Abstract: The stress analysis of flexible gear of harmonic gear reducer was analyzed from the theoretical
perspective. According to the model of smooth cylindrical shell,the normal stress along the direction of
the bus,circumferential normal stress,shear stress and fatigue strength were obtained. In the analysis of
the experiment,first established a rigid-flex hybrid model through ADAMS software,after rigid-flex
coupling simulation validated the model,through the ANSYS Workbench software,the dynamic analysis
of the flexible gear was carried out,and the fatigue safety factor and the position which was the most
susceptible to fatigue of the flexible gear was obtained. The results based on collaborative simulation
showed that the numerical value of computer analysis was very close to the theoretical value,which
verified the correctness of theoretical analysis.
Key words: harmonic reducer; flexible gear; stress; fatigue strength; collaborative simulation
0 引言 式中 u———轴向位移;
谐波减速器中的柔轮是一薄壁壳体,受力复杂, v———切向位移。
是最易发生疲劳破坏的部件,有关柔轮的应力破坏 柔轮应力
分析文献鲜见。 有学者建立柔轮接触仿真模型,分 ν1 ν 0 ν
ν ν
ν ν
析了装配变形和结构参数对谐波传动柔轮应力的影 Ee ν νν 1 0 ν ν
σ=De= ν ν (2)
响。 另有学者对比不同润滑方式的研究成果,提出 1-ν2 ν ν ν ν0 0 1 (1-ν) ν ν ν ν
谐波减速器柔轮磨损失效机理研究方面存在的问 νν 2 νν
ν ν
题。本文对柔轮的应力及强度进行理论分析,采用协 式中 E———材料的杨氏模量;
同仿真分析法验证推导的正确性。 D———刚度;
1 柔轮的应力分析 ν———材料的泊松比。
因柔轮对刚轮的挤压受迫式啮合的影响不易估 z
计,参与内啮合的齿数与齿轮的摩擦及载荷应力复
杂。 在此将问题简化,使用光滑圆柱壳体模型进行
应力分析。 现假设:①刚轮与波发生器作为刚性体;
②柔轮的变形量看作小变形;③作用于柔轮外齿的
径向载荷和波发生器的径向力相等,且柔轮切向载
φ z0
y
荷相同。 柔轮的应力分析模型如图1所示。
柔轮应变
T x
x0
y0
�坠u 坠v 坠u 坠u �
e= , , + (1)
坠x 坠y 坠y 坠x 图1 柔轮应力分析模型
由参考文献[4],壳体中性层到原点上的沿 z 轴
*国家科技重大专项项目(2009ZX04001-014);陕西省科技厅自然
科学基础研究计划项目(2014JM7264) 径向位移量
209第37卷第03期 谐波减速器的柔轮应力及疲劳强度分析———张功学,等 Vol.37No.03
将式(8)~式(10)整理可得
z ωz Σcosnβcosnφ
ω=ω = 0 × (3)
z L (n2-1)2
L Σ cosnβ n=2,4,6… M= νω 0 Dz Σ cosnβcosnφ (16)
(n2-1)2 z n2-1
n=2,4,6… r 2L Σ cosnβ n=2,4,6…
式中 ω———径向位移量; m (n2-1)2
n=2,4,6…
L———柔轮壳体长度;
ωDz Σ cosnβcosnφ
M = 0 (17)
ω z 0 —— —— — — 柔 柔 轮 轮 轴 的 向 最 位 大 移 径 ; 向变形量; φ r m 2L Σ ( c n o 2 s - n 1 β )2 n=2,4,6… n2-1
n=2,4,6…
n———自然数;
β———两触头相对于变形长轴的夹角; M = ω 0 D(1-ν) Σ (2n2-1)cosnβsinnφ (18)
zφ 2n(n2-1)2
φ———作用点与y轴的夹角。
r L
Σ cosnβ n=2,4,6…
m (n2-1)2
中性层到原点切向位移量 n=2,4,6…
至此,就可以求出沿母线方向的正应力
ωz Σcosnβcosnφ
v=- 0 × (4)
z n(n2-1)2 6M 6νωDz Σ cosnβcosnφ
L Σ cosnβ n=2,4,6… σ z = δ2 z = 0 n2-1 (19)
n=2,4,6… (n2-1)2 δ2r 2L Σ cosnβ n=2,4,6…
m (n2-1)2
根据参考文献[5],由圆柱壳体的物理方程可知 n=2,4,6…
轴向法向力 周向正应力
N= Eδ Σ坠u +ν Σ1 坠v + ω ΣΣ (5) σ = 6M φ = 6ω 0 Dz Σ cosnβcosnφ (20)
z 1-ν2 坠z r m 坠φ r m φ δ2 δ2r 2L Σ cosnβ n=2,4,6… n2-1
式中 r m ———柔轮中性层半径; m n=2,4,6… (n2-1)2
δ———柔轮齿圈处的壁厚。
剪应力
切向的法向力
6M
τ = zφ =
Eδ φ1 坠v ω 坠u Σ zφ δ2
N = + +ν (6)
φ 1-ν2 r 坠φ r 坠z
m m
6ωD(1-ν) Σ (2n2-1)cosnβsinnφ
剪力 0 (21)
2n(n2-1)2
Eδ φ1 坠u 坠v Σ δ2r L Σcos nβ n=2,4,6…
S
zφ
=
2(1+ν) r 坠φ
+
坠z
(7) m
n=2,4,6…
(n2-1)2
m
而作用于柔轮的剪应力
z方向上的弯矩
坠2ω 1 φ坠2ω 坠v Σ τ= T (22)
M z =-D[ 坠z2 +ν r 2 坠φ2 - 坠φ ] (8) T 2πr m 2δ
m
式中 T———转矩。
φ方向上的弯矩
1 φ坠2ω 坠v Σ 坠2ω 同时,柔轮壁厚δ=1 mm,z=L,令
M =-D[ - +ν ] (9)
φ r 2 坠φ2 坠φ 坠z2
m Σcosnβsinnφ
z、φ方向上的扭矩 n2-1
n=2,4,6… =σ′ (23)
M =-D(1-ν) 1 φ坠2ω - 1 坠v Σ (10) Σcos nβ φ
zφ r 坠z坠φ 2 坠z (n2-1)2
m n=2,4,6…
进一步可以求出
Σ(2n2-1)cosnβsinnφ
坠2ω
z -
坠v
z =-
ω
0
z Σcosnβcosnφ
(11) n=2,4,6…
2n(n2-1)2
=τ ′ (24)
坠φ2 坠φ n2-1 zφ
Σ cosnβ n=2,4,6… Σcos nβ
L
(n2-1)2 (n2-1)2
n=2,4,6… n=2,4,6…
坠2ω 可得出
z =0 (12)
坠z2
6νωD 6ωD 6(1-ν)ωD
σ= 0 σ′,σ= 0 σ′,τ = 0 τ ′ (25)
z δ2r 2 φ φ δ2r 2 φ zφ δ2r L zφ
坠2ω ω Σncosnβsinnφ m m m
z =- 0 (13)
坠z坠φ (n2-1)2 Eδ3
Σ cosnβ n=2,4,6… 将D= 代入式(25),取正应力系数
L 2(1-ν2)
(n2-1)2
n=2,4,6…
σ′
C = φ (26)
坠v ω Σ cosnβsinnφ σ 2(1-ν2)
z =- 0 (14)
坠z n(n2-1)2
Σ cosnβ n=2,4,6… 剪应力系数
L
n=2,4,6…
(n2-1)2
C= τ zφ ′ (27)
又因已假设薄壳中性层0 应变,则 τ 2(1+ν)
N=0,N =0,S =0 (15) 为计算方便,取L=1,因此
z φ zφ
210Vol.37No.03 谐波减速器的柔轮应力及疲劳强度分析———张功学,等 第37卷第03期
νωEδ ωEδ ωEδ σ=C 0 ,σ=C 0 ,τ =C 0 (28)
z σ r 2 φ σ r 2 zφ τ r L
m m m
柔轮受到沿其母线方向和周向的正应力,通过
变形和扭转产生切应力,考虑到 z 向应力较小,用受
σ 影响的系数K 来计算其影响。柔轮的疲劳强度采
z z
用校验双向稳定变应力状态下的安全系数。 则
σ=σ,σ =0,τ=τ =0.5(τ +τ ) (29)
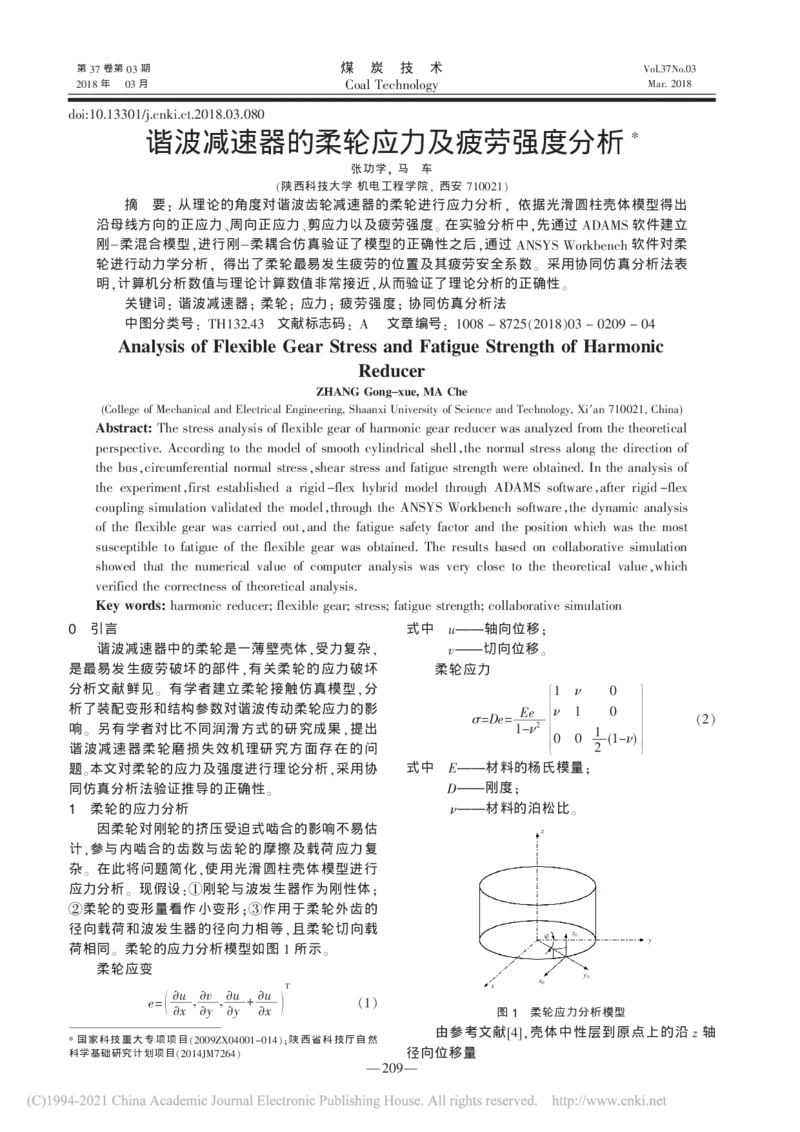
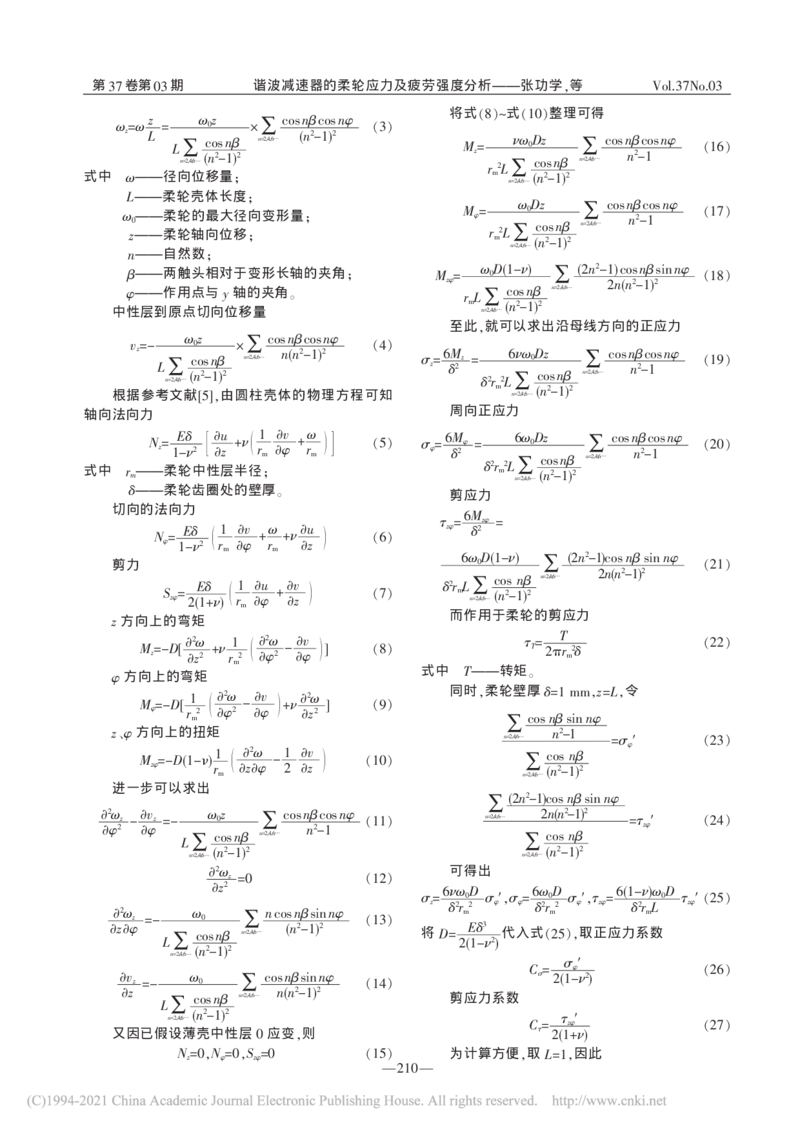
a φ m a m M zφ 时间/s
式中 σ a 、σ m ———正应力和切应力的应力幅; 图3 柔轮沿x、y向的位移-时间曲线
τ a 、τ m ———正应力和切应力的平均应力; 柔轮工作时,按照ω=ω 0 cos(2φ)呈简谐变化,因
τ M ———柔轮受到转矩T后产生的切应力。 此,本文柔轮变形符合工作要求。
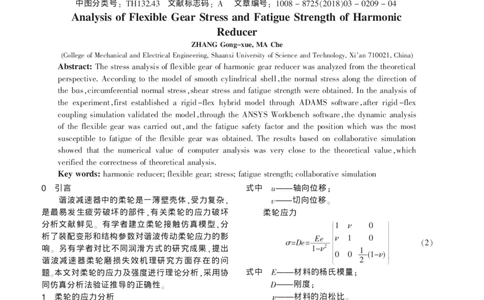
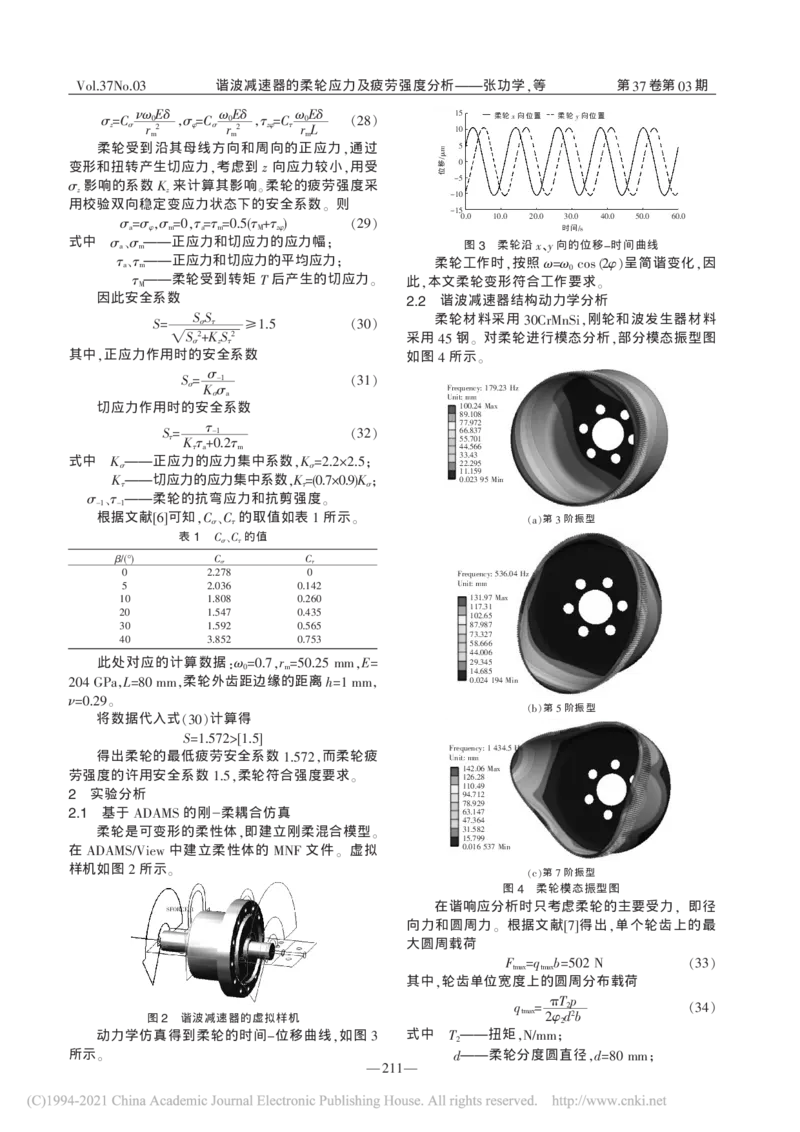
因此安全系数 2.2 谐波减速器结构动力学分析
S= S σ S τ ≥1.5 (30) 柔轮材料采用 30CrMnSi,刚轮和波发生器材料
姨S 2+KS2 采用45钢。 对柔轮进行模态分析,部分模态振型图
σ z τ
其中,正应力作用时的安全系数 如图4所示。
σ
S = -1 (31)
σ K σ
σ a
切应力作用时的安全系数
τ
S= -1 (32)
τ Kτ+0.2τ
τ a m
式中 K ———正应力的应力集中系数,K =2.2×2.5;
σ σ
K———切应力的应力集中系数,K=(0.7×0.9)K ;
τ τ σ
σ 、τ ———柔轮的抗弯应力和抗剪强度。
-1 -1
根据文献[6]可知,C σ 、C τ 的取值如表1所示。 (a)第3阶振型
表1 C 、C 的值
σ τ
β/(°) C C
σ τ
0 2.278 0
5 2.036 0.142
10 1.808 0.260
20 1.547 0.435
30 1.592 0.565
40 3.852 0.753
此处对应的计算数据:ω=0.7,r =50.25 mm,E=
0 m
204 GPa,L=80 mm,柔轮外齿距边缘的距离h=1 mm,
ν=0.29。
(b)第5阶振型
将数据代入式(30)计算得
S=1.572>[1.5]
得出柔轮的最低疲劳安全系数 1.572,而柔轮疲
劳强度的许用安全系数1.5,柔轮符合强度要求。
2 实验分析
2.1 基于ADAMS的刚-柔耦合仿真
柔轮是可变形的柔性体,即建立刚柔混合模型。
在 ADAMS/View 中建立柔性体的 MNF 文件。 虚拟
样机如图2 所示。
(c)第7阶振型
图4 柔轮模态振型图
在谐响应分析时只考虑柔轮的主要受力, 即径
向力和圆周力。 根据文献[7]得出,单个轮齿上的最
大圆周载荷
F =q b=502 N (33)
tmax tmax
其中,轮齿单位宽度上的圆周分布载荷
πTp
q = 2 (34)
图2 谐波减速器的虚拟样机 tmax 2φ 2 d2b
动力学仿真得到柔轮的时间-位移曲线,如图 3 式中 T———扭矩,N/mm;
2
所示。 d———柔轮分度圆直径,d=80 mm;
mμ/移位
15 柔轮x向位置 柔轮y向位置
10
5
0
-5
-10
-15
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Frequency:179.23Hz
Unit:mm
100.24Max
89.108
77.972
66.837
55.701
44.566
33.43
22.295
11.159
0.02395Min
Frequency:536.04Hz
Unit:mm
131.97Max
117.31
102.65
87.987
73.327
58.666
44.006
29.345
14.685
0.024194Min
Frequency:1434.5Hz
Unit:mm
142.06Max
126.28
110.49
94.712
78.929
63.147
47.364
31.582
15.799
0.016537Min
SFORCE_1
211第37卷第03期 谐波减速器的柔轮应力及疲劳强度分析———张功学,等 Vol.37No.03
b———齿圈的工作宽度,b=9 mm; 了理论分析的正确性。
φ———轮齿的偏斜角度,谐波齿轮传动φ=π/8。
2 2
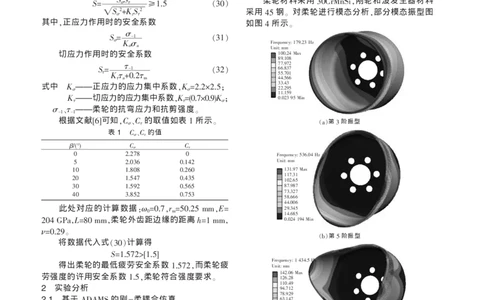
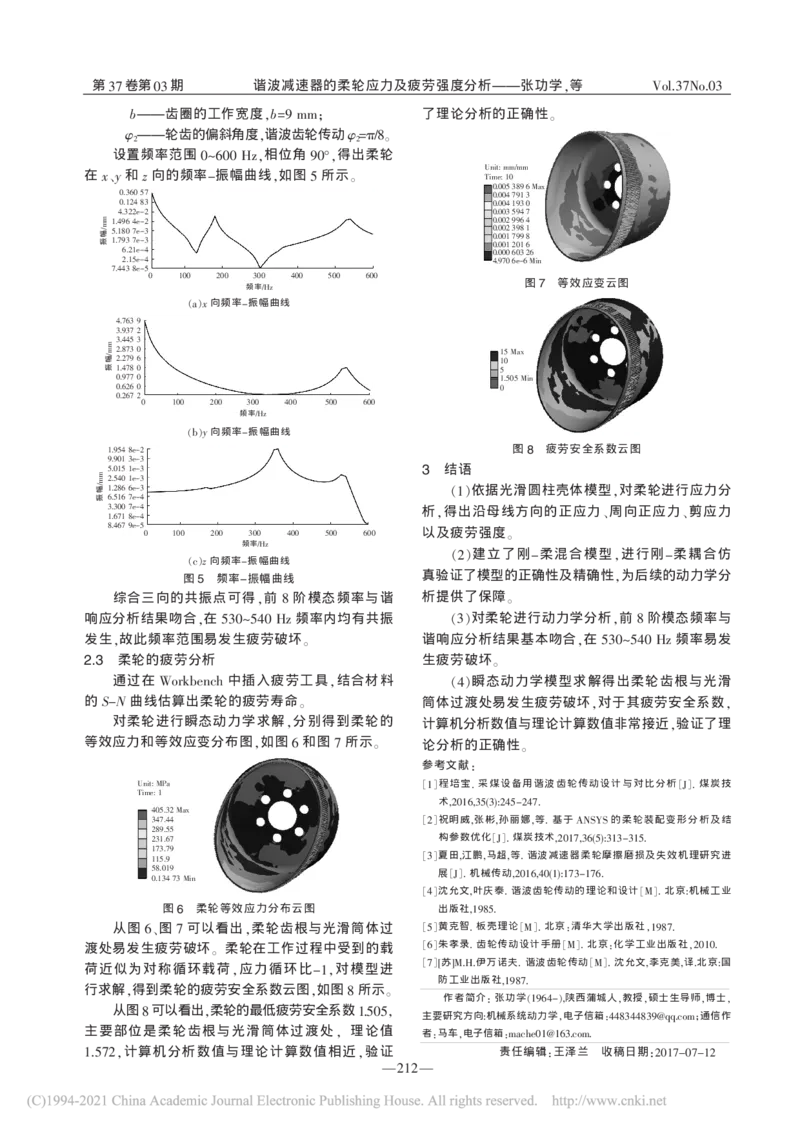
设置频率范围 0~600 Hz,相位角 90°,得出柔轮
在x、y和z向的频率-振幅曲线,如图5所示。
0.36057
0.12483
4.322e-2
1.4964e-2
5.1807e-3
1.7937e-3
6.21e-4
2.15e-4
7.4438e-5
0 100 200 300 400 500 600
图7 等效应变云图
频率/Hz
(a)x向频率-振幅曲线
(b)y向频率-振幅曲线
图8 疲劳安全系数云图
3 结语
(1)依据光滑圆柱壳体模型,对柔轮进行应力分
析,得出沿母线方向的正应力、周向正应力、剪应力
以及疲劳强度。
(2)建立了刚-柔混合模型,进行刚-柔耦合仿
(c)z向频率-振幅曲线
图5 频率-振幅曲线 真验证了模型的正确性及精确性,为后续的动力学分
综合三向的共振点可得,前 8 阶模态频率与谐 析提供了保障。
响应分析结果吻合,在530~540 Hz频率内均有共振 (3)对柔轮进行动力学分析,前8阶模态频率与
发生,故此频率范围易发生疲劳破坏。 谐响应分析结果基本吻合,在530~540 Hz频率易发
2.3 柔轮的疲劳分析 生疲劳破坏。
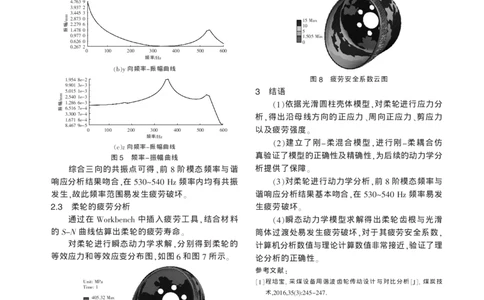
通过在 Workbench 中插入疲劳工具,结合材料 (4)瞬态动力学模型求解得出柔轮齿根与光滑
的S-N曲线估算出柔轮的疲劳寿命。 筒体过渡处易发生疲劳破坏,对于其疲劳安全系数,
对柔轮进行瞬态动力学求解,分别得到柔轮的 计算机分析数值与理论计算数值非常接近,验证了理
等效应力和等效应变分布图,如图6和图7所示。 论分析的正确性。
参考文献:
[1]程培宝. 采煤设备用谐波齿轮传动设计与对比分析[J]. 煤炭技
术,2016,35(3):245-247.
[2]祝明威,张彬,孙丽娜,等. 基于ANSYS的柔轮装配变形分析及结
构参数优化[J].煤炭技术,2017,36(5):313-315.
[3]夏田,江鹏,马超,等.谐波减速器柔轮摩擦磨损及失效机理研究进
展[J].机械传动,2016,40(1):173-176.
[4]沈允文,叶庆泰.谐波齿轮传动的理论和设计[M].北京:机械工业
图6 柔轮等效应力分布云图 出版社,1985.
从图 6、图 7 可以看出,柔轮齿根与光滑筒体过 [5]黄克智.板壳理论[M].北京:清华大学出版社,1987.
渡处易发生疲劳破坏。 柔轮在工作过程中受到的载 [6]朱孝录.齿轮传动设计手册[M].北京:化学工业出版社,2010.
[7][苏]M.H.伊万诺夫.谐波齿轮传动[M].沈允文,李克美,译.北京:国
荷近似为对称循环载荷,应力循环比-1,对模型进
防工业出版社,1987.
行求解,得到柔轮的疲劳安全系数云图,如图8所示。
作者简介:张功学(1964-),陕西蒲城人,教授,硕士生导师,博士,
从图8可以看出,柔轮的最低疲劳安全系数1.505,
主要研究方向:机械系统动力学,电子信箱:448344839@qq.com;通信作
主要部位是柔轮齿根与光滑筒体过渡处, 理论值 者:马车,电子信箱:mache01@163.com.
1.572,计算机分析数值与理论计算数值相近,验证 责任编辑:王泽兰 收稿日期:2017-07-12
mm/幅振
4.7639
3.9372
3.4453
2.8730
2.2796
1.4780
0.9770
0.6260
0.2672
频率/Hz
mm/幅振
频率/Hz
mm/幅振
Unit:mm/mm
Time:10
0.0053896Max
0.0047913
0.0041930
0.0035947
0.0029964
0.0023981
0.0017998
0.0012016
0.00060326
4.9706e-6Min
15Max
10
5
1.505Min
0
0 100 200 300 400 500 600
1.9548e-2
9.9013e-3
5.0151e-3
2.5401e-3
1.2866e-3
6.5167e-4
3.3007e-4
1.6718e-4
8.4679e-5
0 100 200 300 400 500 600
Unit:MPa
Time:1
405.32Max
347.44
289.55
231.67
173.79
115.9
58.019
0.13473Min
212
