文档内容
第 16 讲 力学实验
目标要求 1.会使用刻度尺、秒表、打点计时器、游标卡尺、螺旋测微器测量有关数据。2.熟悉教材中的
力学实验原理、实验过程,会操作有关实验,进行数据处理、误差分析,并会借助基本实验分析创新实验。
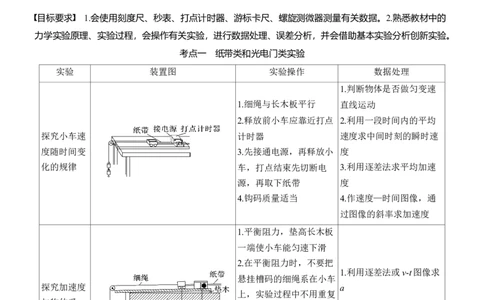
考点一 纸带类和光电门类实验
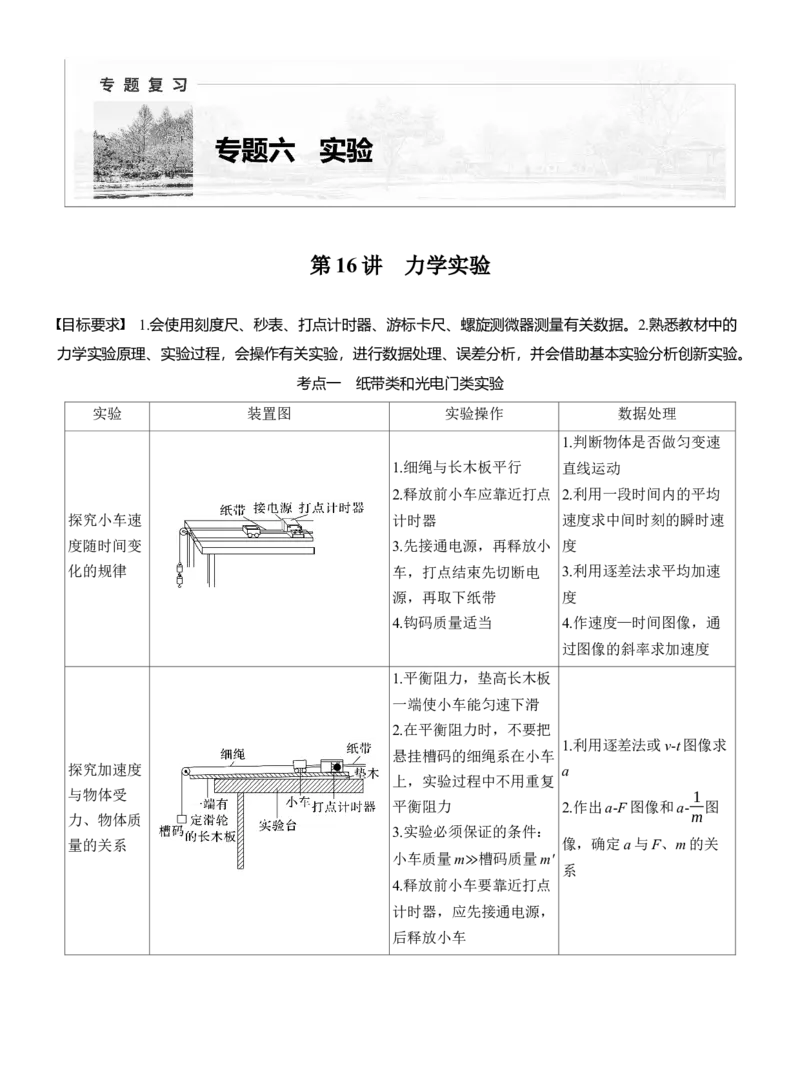
实验 装置图 实验操作 数据处理
1.判断物体是否做匀变速
1.细绳与长木板平行 直线运动
2.释放前小车应靠近打点 2.利用一段时间内的平均
探究小车速 计时器 速度求中间时刻的瞬时速
度随时间变 3.先接通电源,再释放小 度
化的规律 车,打点结束先切断电 3.利用逐差法求平均加速
源,再取下纸带 度
4.钩码质量适当 4.作速度—时间图像,通
过图像的斜率求加速度
1.平衡阻力,垫高长木板
一端使小车能匀速下滑
2.在平衡阻力时,不要把
1.利用逐差法或v-t图像求
悬挂槽码的细绳系在小车
探究加速度 a
上,实验过程中不用重复
与物体受 1
平衡阻力 2.作出a-F图像和a- 图
力、物体质 m
3.实验必须保证的条件:
量的关系 像,确定a与F、m的关
小车质量m 槽码质量m'
系
4.释放前小车要靠近打点
≫
计时器,应先接通电源,
后释放小车h -h
1.应用v = n+1 n-1计算某
1.竖直安装打点计时器,以 n 2T
减小摩擦阻力 时刻的瞬时速度
2.选用质量大、体积小、密 1 1
2.判断mgh 与 mv 2 - m
AB 2 B 2
验证机械能守 度大的材料
恒定律 3.选取第1、2两点间距离 v 2是否在误差允许的范围内
A
接近2 mm的纸带,用 相等
1 1
mgh= mv2进行验证 3.作出 v2-h图像,求g的大
2 2
小
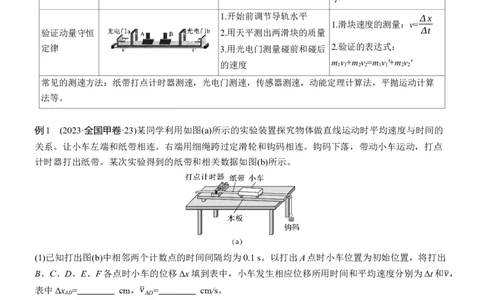
1.开始前调节导轨水平 Δx
1.滑块速度的测量:v=
验证动量守恒 2.用天平测出两滑块的质量 Δt
定律 3.用光电门测量碰前和碰后 2.验证的表达式:
的速度 m 1 v 1 +m 2 v 2 =m 1 v 1 '+m 2 v 2 '
常见的测速方法:纸带打点计时器测速,光电门测速,传感器测速,动能定理计算法,平抛运动计算
法等。
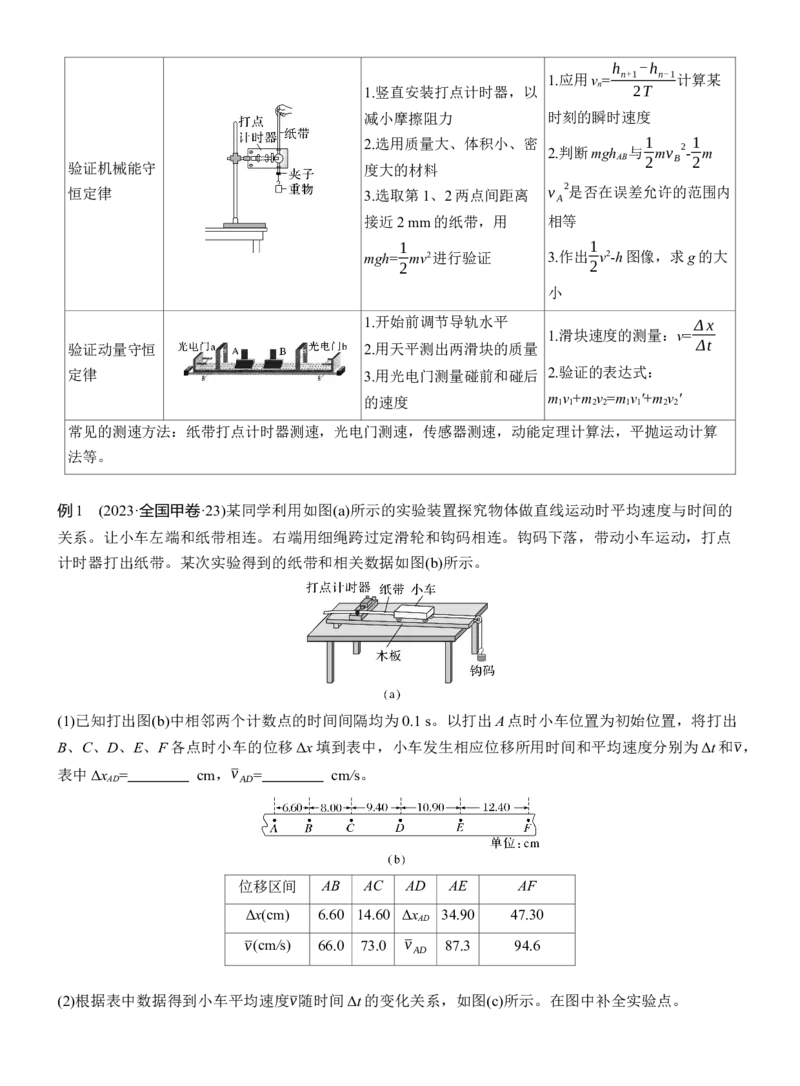
例1 (2023·全国甲卷·23)某同学利用如图(a)所示的实验装置探究物体做直线运动时平均速度与时间的
关系。让小车左端和纸带相连。右端用细绳跨过定滑轮和钩码相连。钩码下落,带动小车运动,打点
计时器打出纸带。某次实验得到的纸带和相关数据如图(b)所示。
(1)已知打出图(b)中相邻两个计数点的时间间隔均为0.1 s。以打出A点时小车位置为初始位置,将打出
B、C、D、E、F各点时小车的位移Δx填到表中,小车发生相应位移所用时间和平均速度分别为Δt和v,
表中Δx = cm,v = cm/s。
AD AD
位移区间 AB AC AD AE AF
Δx(cm) 6.60 14.60 Δx 34.90 47.30
AD
v(cm/s) 66.0 73.0 v 87.3 94.6
AD
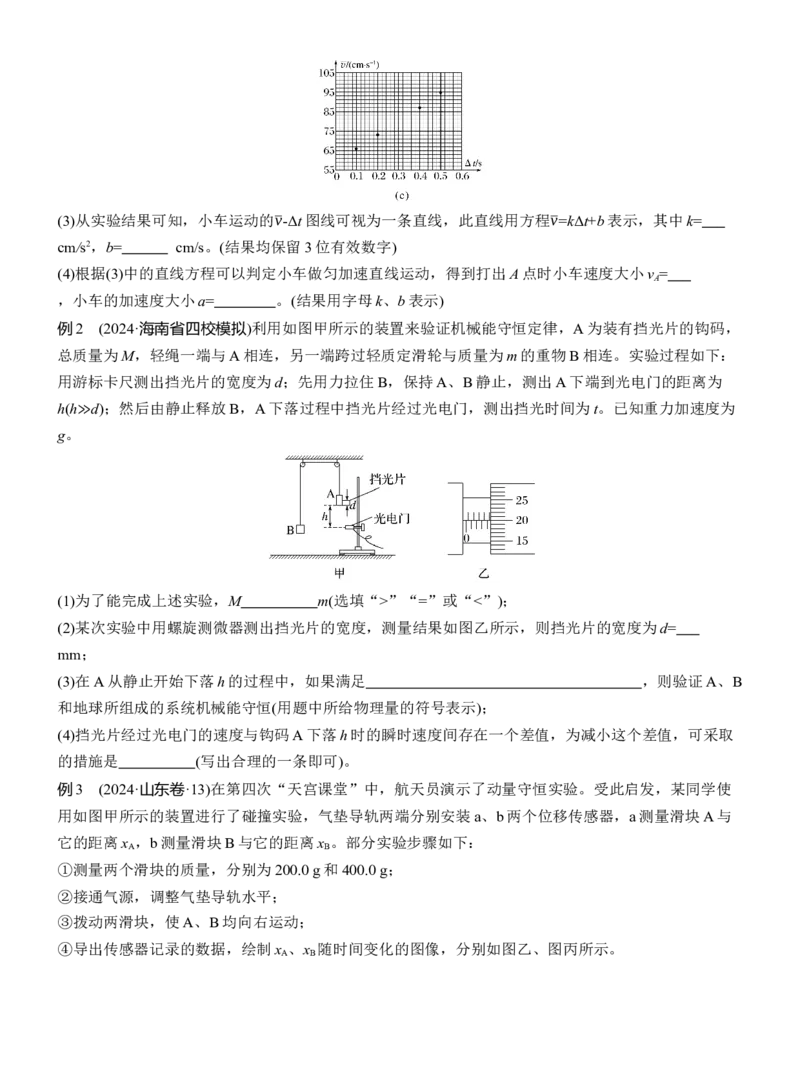
(2)根据表中数据得到小车平均速度v随时间Δt的变化关系,如图(c)所示。在图中补全实验点。(3)从实验结果可知,小车运动的v-Δt图线可视为一条直线,此直线用方程v=kΔt+b表示,其中k=
cm/s2,b= cm/s。(结果均保留3位有效数字)
(4)根据(3)中的直线方程可以判定小车做匀加速直线运动,得到打出A点时小车速度大小v =
A
,小车的加速度大小a= 。(结果用字母k、b表示)
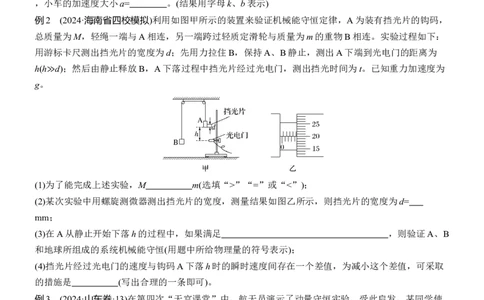
例2 (2024·海南省四校模拟)利用如图甲所示的装置来验证机械能守恒定律,A为装有挡光片的钩码,
总质量为M,轻绳一端与A相连,另一端跨过轻质定滑轮与质量为m的重物B相连。实验过程如下:
用游标卡尺测出挡光片的宽度为d;先用力拉住B,保持A、B静止,测出A下端到光电门的距离为
h(h d);然后由静止释放B,A下落过程中挡光片经过光电门,测出挡光时间为t。已知重力加速度为
g。
≫
(1)为了能完成上述实验,M m(选填“>”“=”或“<”);
(2)某次实验中用螺旋测微器测出挡光片的宽度,测量结果如图乙所示,则挡光片的宽度为d=
mm;
(3)在A从静止开始下落h的过程中,如果满足 ,则验证A、B
和地球所组成的系统机械能守恒(用题中所给物理量的符号表示);
(4)挡光片经过光电门的速度与钩码A下落h时的瞬时速度间存在一个差值,为减小这个差值,可采取
的措施是 (写出合理的一条即可)。
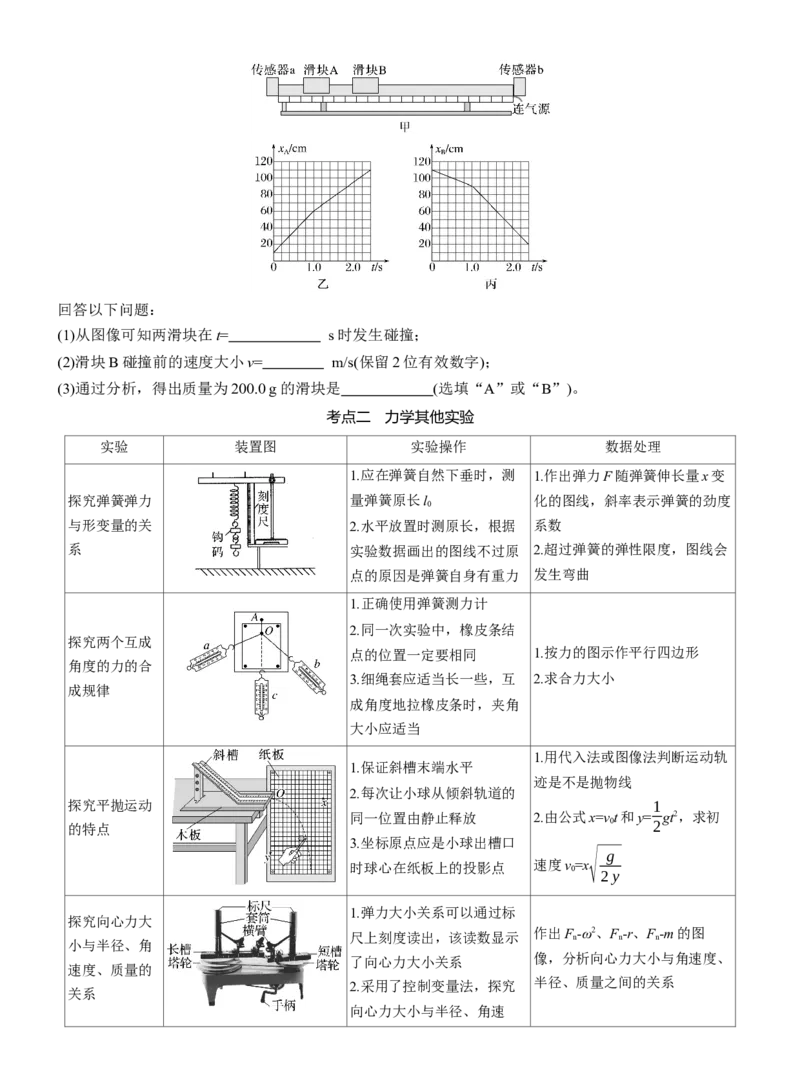
例3 (2024·山东卷·13)在第四次“天宫课堂”中,航天员演示了动量守恒实验。受此启发,某同学使
用如图甲所示的装置进行了碰撞实验,气垫导轨两端分别安装a、b两个位移传感器,a测量滑块A与
它的距离x ,b测量滑块B与它的距离x 。部分实验步骤如下:
A B
①测量两个滑块的质量,分别为200.0 g和400.0 g;
②接通气源,调整气垫导轨水平;
③拨动两滑块,使A、B均向右运动;
④导出传感器记录的数据,绘制x 、x 随时间变化的图像,分别如图乙、图丙所示。
A B回答以下问题:
(1)从图像可知两滑块在t= s时发生碰撞;
(2)滑块B碰撞前的速度大小v= m/s(保留2位有效数字);
(3)通过分析,得出质量为200.0 g的滑块是 (选填“A”或“B”)。
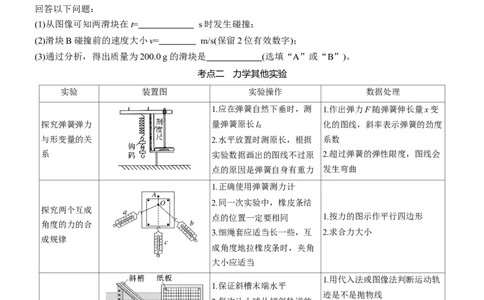
考点二 力学其他实验
实验 装置图 实验操作 数据处理
1.应在弹簧自然下垂时,测 1.作出弹力F随弹簧伸长量x变
探究弹簧弹力 量弹簧原长l 化的图线,斜率表示弹簧的劲度
0
与形变量的关 2.水平放置时测原长,根据 系数
系 实验数据画出的图线不过原 2.超过弹簧的弹性限度,图线会
点的原因是弹簧自身有重力 发生弯曲
1.正确使用弹簧测力计
2.同一次实验中,橡皮条结
探究两个互成
点的位置一定要相同 1.按力的图示作平行四边形
角度的力的合
3.细绳套应适当长一些,互 2.求合力大小
成规律
成角度地拉橡皮条时,夹角
大小应适当
1.用代入法或图像法判断运动轨
1.保证斜槽末端水平
迹是不是抛物线
2.每次让小球从倾斜轨道的
探究平抛运动 1
同一位置由静止释放 2.由公式x=vt和y= gt2,求初
的特点 0 2
3.坐标原点应是小球出槽口
√ g
时球心在纸板上的投影点 速度v 0 =x
2y
1.弹力大小关系可以通过标
探究向心力大
尺上刻度读出,该读数显示
作出F
n
-ω2、F
n
-r、F
n
-m的图
小与半径、角
了向心力大小关系 像,分析向心力大小与角速度、
速度、质量的
2.采用了控制变量法,探究 半径、质量之间的关系
关系
向心力大小与半径、角速度、质量的关系
1.保证悬点固定
2.单摆必须在同一平面内振 4π2l
1.利用公式g= 求重力加速
用单摆测量重 动,且摆角小于5°
T2
力加速度的大 3.摆长l=悬线长l'+小球的半 度
小 径r 2.可作出l-T2的图像,利用斜率
t 求重力加速度
4.用T= 计算单摆的周期
n
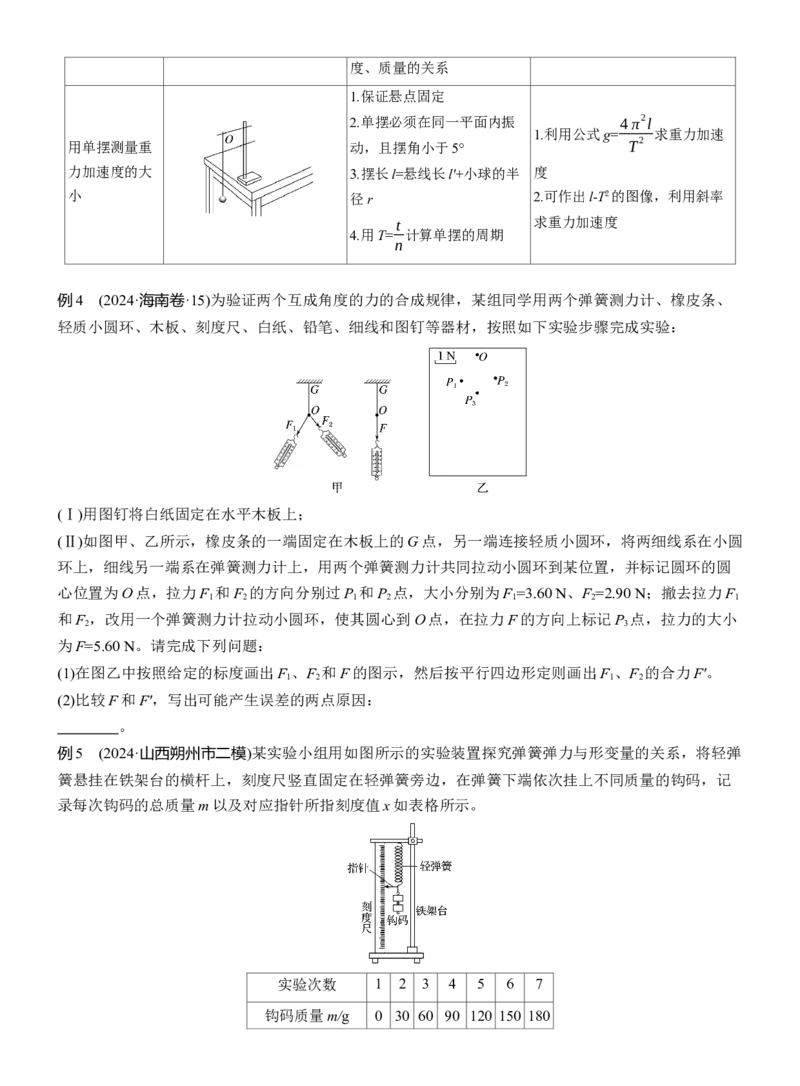
例4 (2024·海南卷·15)为验证两个互成角度的力的合成规律,某组同学用两个弹簧测力计、橡皮条、
轻质小圆环、木板、刻度尺、白纸、铅笔、细线和图钉等器材,按照如下实验步骤完成实验:
(Ⅰ)用图钉将白纸固定在水平木板上;
(Ⅱ)如图甲、乙所示,橡皮条的一端固定在木板上的G点,另一端连接轻质小圆环,将两细线系在小圆
环上,细线另一端系在弹簧测力计上,用两个弹簧测力计共同拉动小圆环到某位置,并标记圆环的圆
心位置为O点,拉力F 和F 的方向分别过P 和P 点,大小分别为F =3.60 N、F =2.90 N;撤去拉力F
1 2 1 2 1 2 1
和F ,改用一个弹簧测力计拉动小圆环,使其圆心到O点,在拉力F的方向上标记P 点,拉力的大小
2 3
为F=5.60 N。请完成下列问题:
(1)在图乙中按照给定的标度画出F 、F 和F的图示,然后按平行四边形定则画出F 、F 的合力F'。
1 2 1 2
(2)比较F和F',写出可能产生误差的两点原因:
。
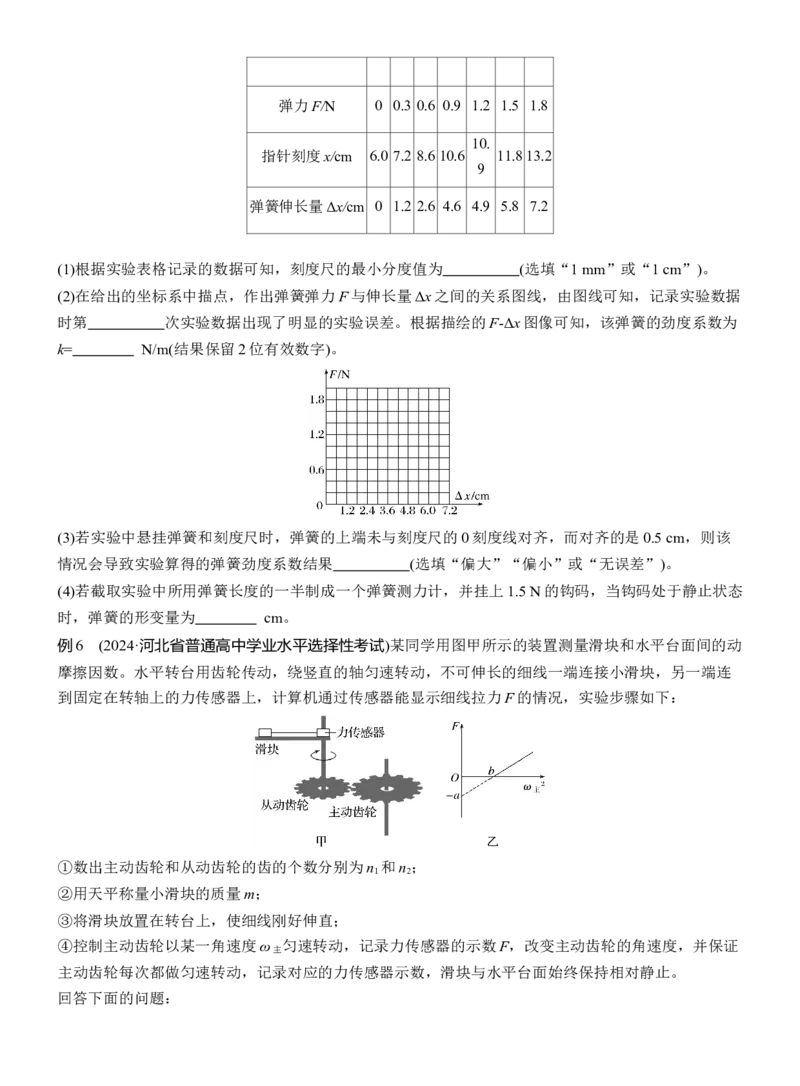
例5 (2024·山西朔州市二模)某实验小组用如图所示的实验装置探究弹簧弹力与形变量的关系,将轻弹
簧悬挂在铁架台的横杆上,刻度尺竖直固定在轻弹簧旁边,在弹簧下端依次挂上不同质量的钩码,记
录每次钩码的总质量m以及对应指针所指刻度值x如表格所示。
实验次数 1 2 3 4 5 6 7
钩码质量m/g 0 30 60 90 120 150 180弹力F/N 0 0.3 0.6 0.9 1.2 1.5 1.8
10.
指针刻度x/cm 6.0 7.2 8.6 10.6 11.813.2
9
弹簧伸长量Δx/cm 0 1.2 2.6 4.6 4.9 5.8 7.2
(1)根据实验表格记录的数据可知,刻度尺的最小分度值为 (选填“1 mm”或“1 cm”)。
(2)在给出的坐标系中描点,作出弹簧弹力F与伸长量Δx之间的关系图线,由图线可知,记录实验数据
时第 次实验数据出现了明显的实验误差。根据描绘的F-Δx图像可知,该弹簧的劲度系数为
k= N/m(结果保留2位有效数字)。
(3)若实验中悬挂弹簧和刻度尺时,弹簧的上端未与刻度尺的0刻度线对齐,而对齐的是0.5 cm,则该
情况会导致实验算得的弹簧劲度系数结果 (选填“偏大”“偏小”或“无误差”)。
(4)若截取实验中所用弹簧长度的一半制成一个弹簧测力计,并挂上1.5 N的钩码,当钩码处于静止状态
时,弹簧的形变量为 cm。
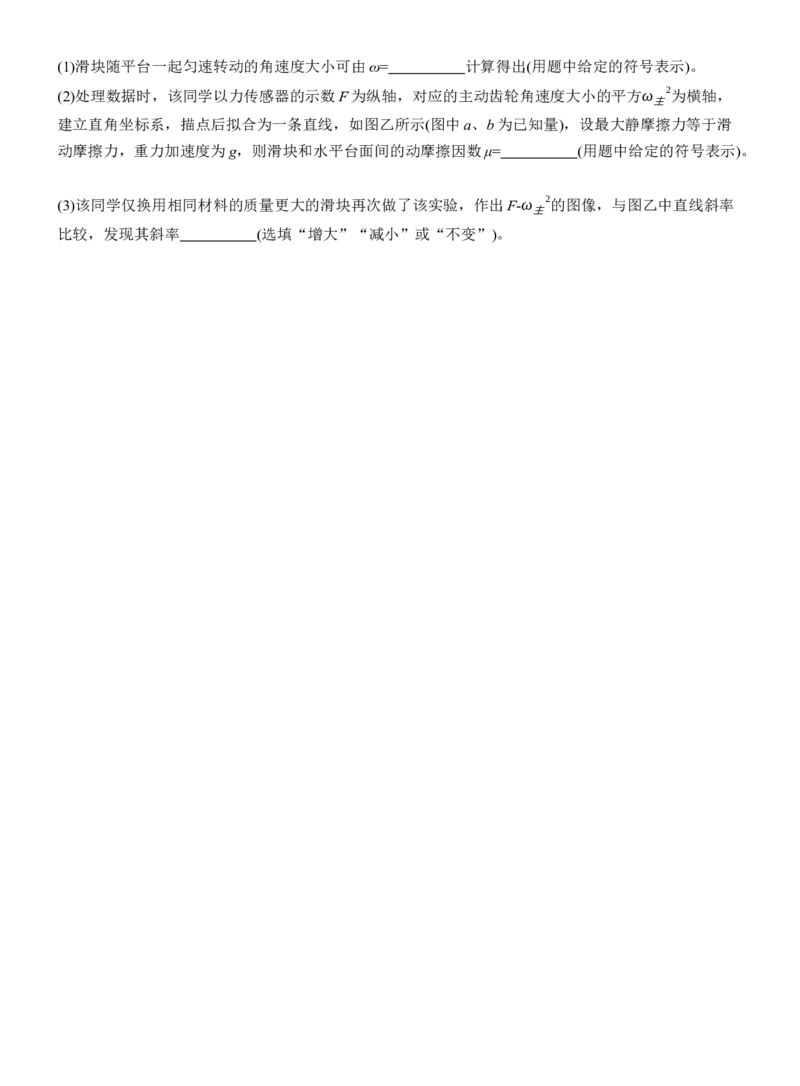
例6 (2024·河北省普通高中学业水平选择性考试)某同学用图甲所示的装置测量滑块和水平台面间的动
摩擦因数。水平转台用齿轮传动,绕竖直的轴匀速转动,不可伸长的细线一端连接小滑块,另一端连
到固定在转轴上的力传感器上,计算机通过传感器能显示细线拉力F的情况,实验步骤如下:
①数出主动齿轮和从动齿轮的齿的个数分别为n 和n ;
1 2
②用天平称量小滑块的质量m;
③将滑块放置在转台上,使细线刚好伸直;
④控制主动齿轮以某一角速度ω 匀速转动,记录力传感器的示数F,改变主动齿轮的角速度,并保证
主
主动齿轮每次都做匀速转动,记录对应的力传感器示数,滑块与水平台面始终保持相对静止。
回答下面的问题:(1)滑块随平台一起匀速转动的角速度大小可由ω= 计算得出(用题中给定的符号表示)。
(2)处理数据时,该同学以力传感器的示数F为纵轴,对应的主动齿轮角速度大小的平方ω 2为横轴,
主
建立直角坐标系,描点后拟合为一条直线,如图乙所示(图中a、b为已知量),设最大静摩擦力等于滑
动摩擦力,重力加速度为g,则滑块和水平台面间的动摩擦因数μ= (用题中给定的符号表示)。
(3)该同学仅换用相同材料的质量更大的滑块再次做了该实验,作出F-ω 2的图像,与图乙中直线斜率
主
比较,发现其斜率 (选填“增大”“减小”或“不变”)。答案精析
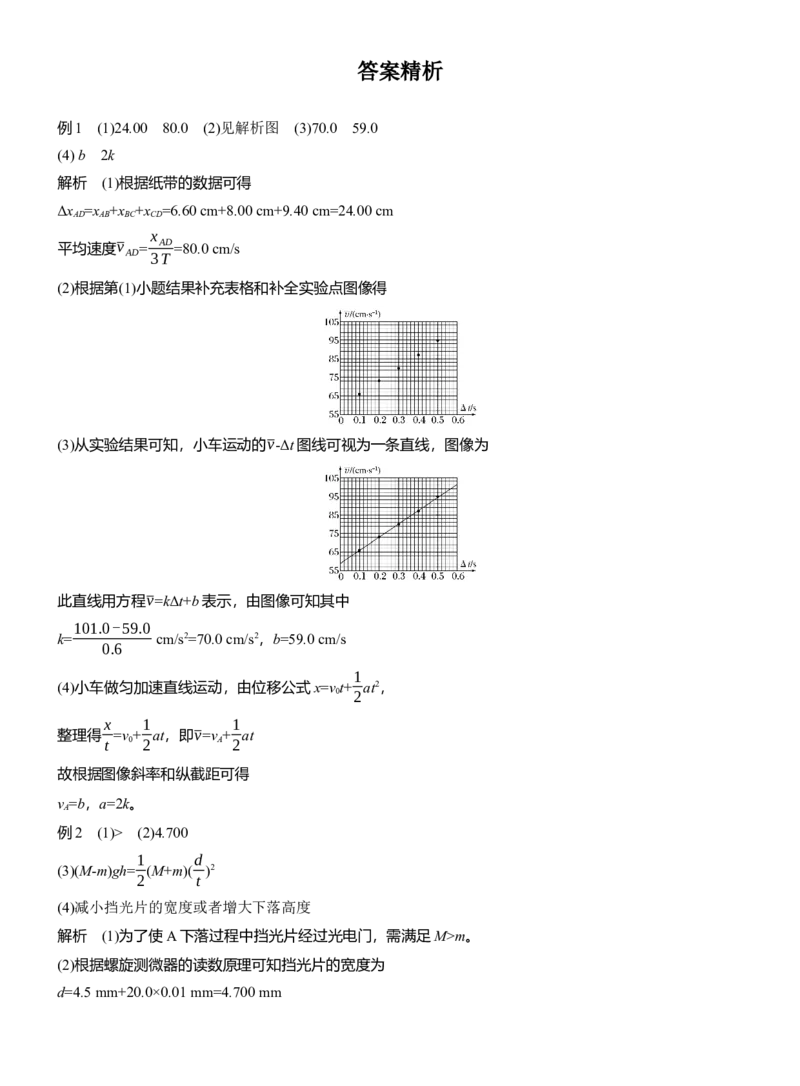
例1 (1)24.00 80.0 (2)见解析图 (3)70.0 59.0
(4) b 2k
解析 (1)根据纸带的数据可得
Δx =x +x +x =6.60 cm+8.00 cm+9.40 cm=24.00 cm
AD AB BC CD
x
平均速度v = AD=80.0 cm/s
AD 3T
(2)根据第(1)小题结果补充表格和补全实验点图像得
(3)从实验结果可知,小车运动的v-Δt图线可视为一条直线,图像为
此直线用方程v=kΔt+b表示,由图像可知其中
101.0-59.0
k= cm/s2=70.0 cm/s2,b=59.0 cm/s
0.6
1
(4)小车做匀加速直线运动,由位移公式x=v t+ at2,
0 2
x 1 1
整理得 =v + at,即v=v + at
t 0 2 A 2
故根据图像斜率和纵截距可得
v =b,a=2k。
A
例2 (1)> (2)4.700
1 d
(3)(M-m)gh= (M+m)( )2
2 t
(4)减小挡光片的宽度或者增大下落高度
解析 (1)为了使A下落过程中挡光片经过光电门,需满足M>m。
(2)根据螺旋测微器的读数原理可知挡光片的宽度为
d=4.5 mm+20.0×0.01 mm=4.700 mmd
(3)A经过光电门时的瞬时速度为v=
t
系统重力势能的减少量为ΔE =(M-m)gh
p
1 d
系统动能的增加量为ΔE = (M+m)( )2
k 2 t
则系统机械能守恒的表达式为
1 d
(M-m)gh= (M+m)( )2
2 t
(4)某段时间内的平均速度等于中间时刻的瞬时速度,可采取减小挡光片的宽度或者增大下落高度。
例3 (1)1.0 (2)0.20 (3)B
解析 (1)由x-t图像的斜率表示速度可知两滑块的速度都在t=1.0 s时发生突变,即这个时刻发生了碰撞;
|90-110|
(2)根据x-t图像斜率的绝对值表示速度大小可知滑块B碰撞前的速度大小为v= cm/s=0.20 m/s
1.0
(3)由题图乙知,碰撞前A的速度大小v =0.50 m/s,碰撞后A的速度大小为v '≈0.36 m/s,
A A
由题图丙可知,碰撞后B的速度大小为v '=0.50 m/s,A和B碰撞过程动量守恒,Δp =-Δp
B A B
即m (v '-v )=m (v-v ')
A A A B B
m
代入数据解得
A≈2
m
B
所以质量为200.0 g的滑块是B。
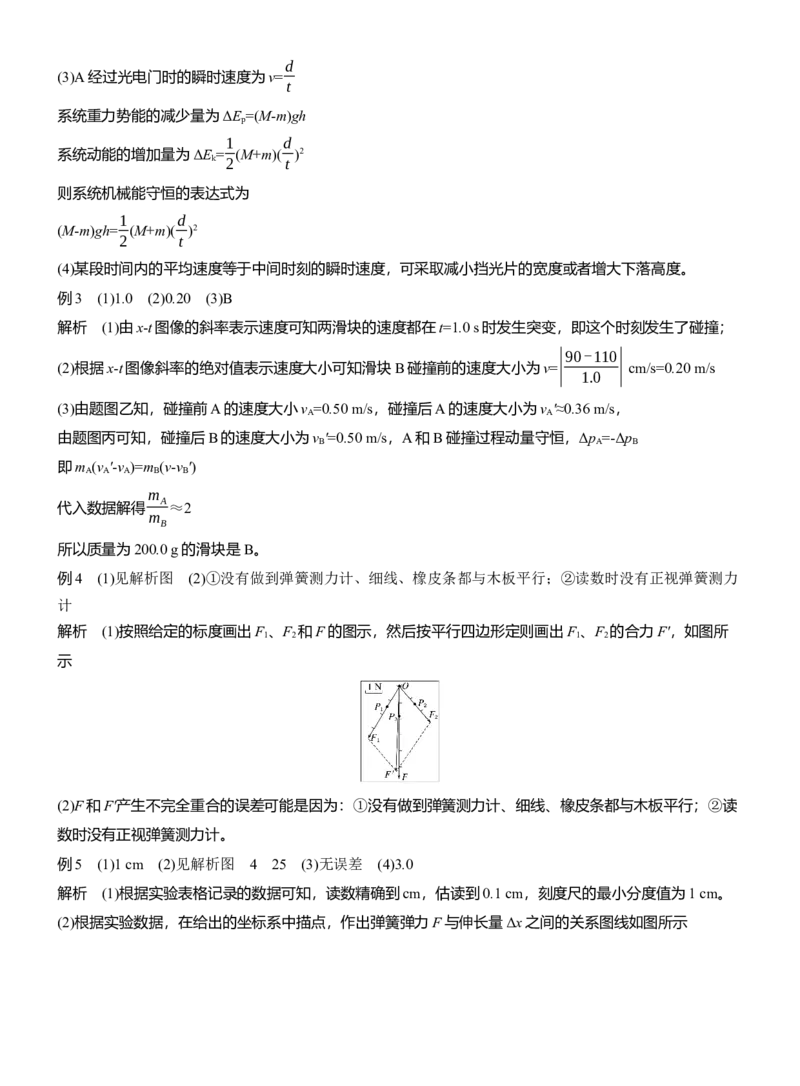
例4 (1)见解析图 (2)①没有做到弹簧测力计、细线、橡皮条都与木板平行;②读数时没有正视弹簧测力
计
解析 (1)按照给定的标度画出F 、F 和F的图示,然后按平行四边形定则画出F 、F 的合力F',如图所
1 2 1 2
示
(2)F和F'产生不完全重合的误差可能是因为:①没有做到弹簧测力计、细线、橡皮条都与木板平行;②读
数时没有正视弹簧测力计。
例5 (1)1 cm (2)见解析图 4 25 (3)无误差 (4)3.0
解析 (1)根据实验表格记录的数据可知,读数精确到cm,估读到0.1 cm,刻度尺的最小分度值为1 cm。
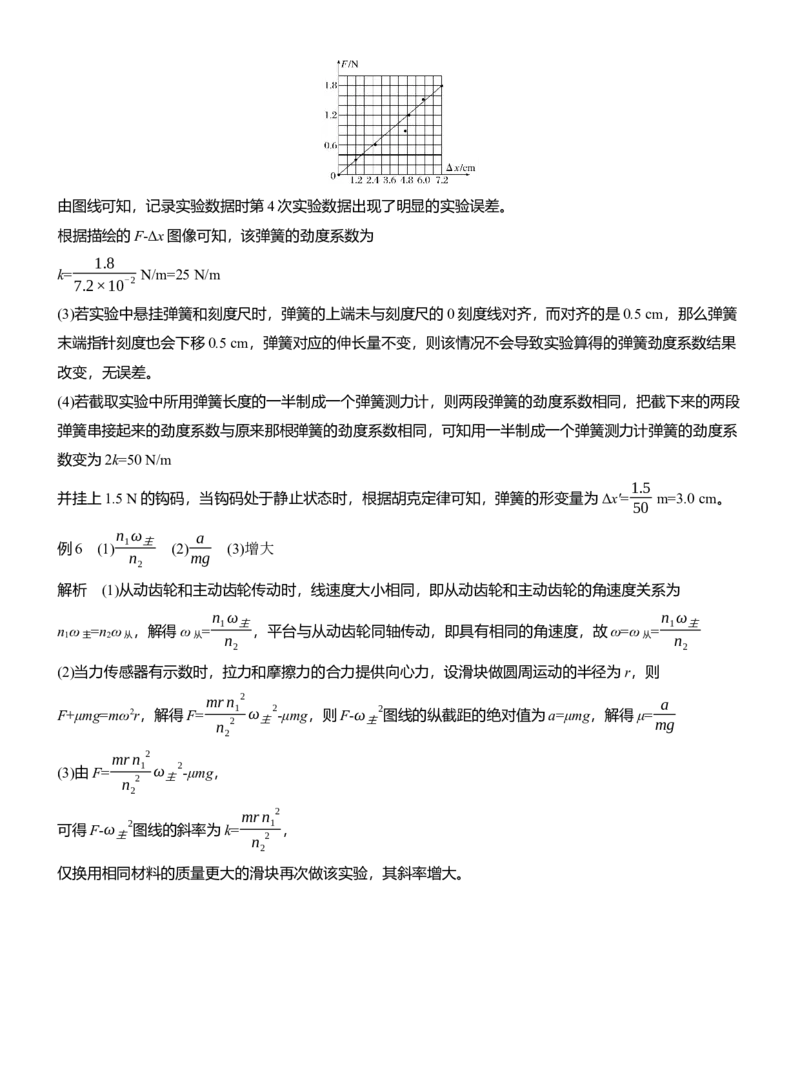
(2)根据实验数据,在给出的坐标系中描点,作出弹簧弹力F与伸长量Δx之间的关系图线如图所示由图线可知,记录实验数据时第4次实验数据出现了明显的实验误差。
根据描绘的F-Δx图像可知,该弹簧的劲度系数为
1.8
k= N/m=25 N/m
7.2×10-2
(3)若实验中悬挂弹簧和刻度尺时,弹簧的上端未与刻度尺的0刻度线对齐,而对齐的是0.5 cm,那么弹簧
末端指针刻度也会下移0.5 cm,弹簧对应的伸长量不变,则该情况不会导致实验算得的弹簧劲度系数结果
改变,无误差。
(4)若截取实验中所用弹簧长度的一半制成一个弹簧测力计,则两段弹簧的劲度系数相同,把截下来的两段
弹簧串接起来的劲度系数与原来那根弹簧的劲度系数相同,可知用一半制成一个弹簧测力计弹簧的劲度系
数变为2k=50 N/m
1.5
并挂上1.5 N的钩码,当钩码处于静止状态时,根据胡克定律可知,弹簧的形变量为Δx'= m=3.0 cm。
50
n ω a
例6 (1) 1 主 (2) (3)增大
n mg
2
解析 (1)从动齿轮和主动齿轮传动时,线速度大小相同,即从动齿轮和主动齿轮的角速度关系为
n ω n ω
1 主 1 主
n ω =n ω ,解得ω = ,平台与从动齿轮同轴传动,即具有相同的角速度,故ω=ω =
1 主 2 从 从 n 从 n
2 2
(2)当力传感器有示数时,拉力和摩擦力的合力提供向心力,设滑块做圆周运动的半径为r,则
mrn 2 a
F+μmg=mω2r,解得F= 1 ω 2 -μmg,则F-ω 2 图线的纵截距的绝对值为a=μmg,解得μ=
n 2 主 主 mg
2
mrn 2
(3)由F= 1 ω 2 -μmg,
n 2 主
2
mrn 2
可得F-ω 2 图线的斜率为k= 1 ,
主 n 2
2
仅换用相同材料的质量更大的滑块再次做该实验,其斜率增大。
