文档内容
2023 重庆高考物理真题
一、单项选择题
1. 矫正牙齿时,可用牵引线对牙施加力的作用。若某颗牙齿受到牵引线的两个作用力大小均为F,夹角为α
(如图),则该牙所受两牵引力的合力大小为( )
a a
A. 2Fsin B. 2Fcos C. Fsina D. Fcosa
2 2
【答案】B
【解析】
a
【详解】根据平行四边形定则可知,该牙所受两牵引力的合力大小为F =2Fcos
合 2
故选B。
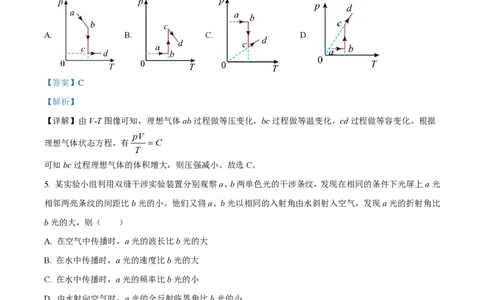
2. 某小组设计了一种呼吸监测方案:在人身上缠绕弹性金属线圈,观察人呼吸时处于匀强磁场中的线圈面
积变化产生的电压,了解人的呼吸状况。如图所示,线圈P的匝数为N,磁场的磁感应强度大小为B,方向
与线圈轴线的夹角为θ。若某次吸气时,在t时间内每匝线圈面积增加了S,则线圈P在该时间内的平均感
应电动势为( )
NBS cosq NBSsinq
A. B.
t t
BSsinq BScosq
C. D.
t t
【答案】A
【解析】
DF S NBScosq
【详解】根据法拉第电磁感应定律有E = N = NBcosq =
Dt t t
故选A。
3. 真空中固定有两个点电荷,负电荷Q 位于坐标原点处,正电荷Q 位于x轴上,Q 的电荷量大小为Q
1 2 2 1
的8倍。若这两点电荷在x轴正半轴的x=x 处产生的合电场强度为0,则Q 、Q 相距( )
0 1 2
A. 2x B. (2 2 -1)x C. 2 2x D. (2 2 +1)x
0 0 0 0
【答案】B
【解析】
【详解】依题意,两点电荷电性相反,且Q 的电荷量较大,所以合场强为0的位置应该在x轴的负半
2
kQ kQ
1 = 2
轴,设两点电荷相距L,根据点电荷场强公式可得
x2 x +L2
0 0
又Q =8Q
2 1
第1页 | 共13页
解得L= 2 2-1 x ,故选B。
0
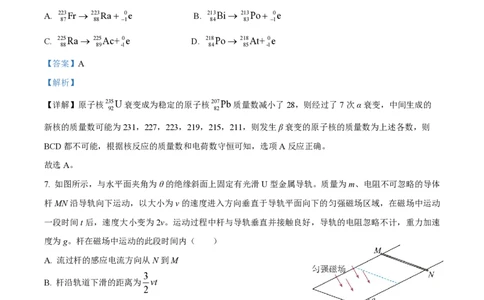
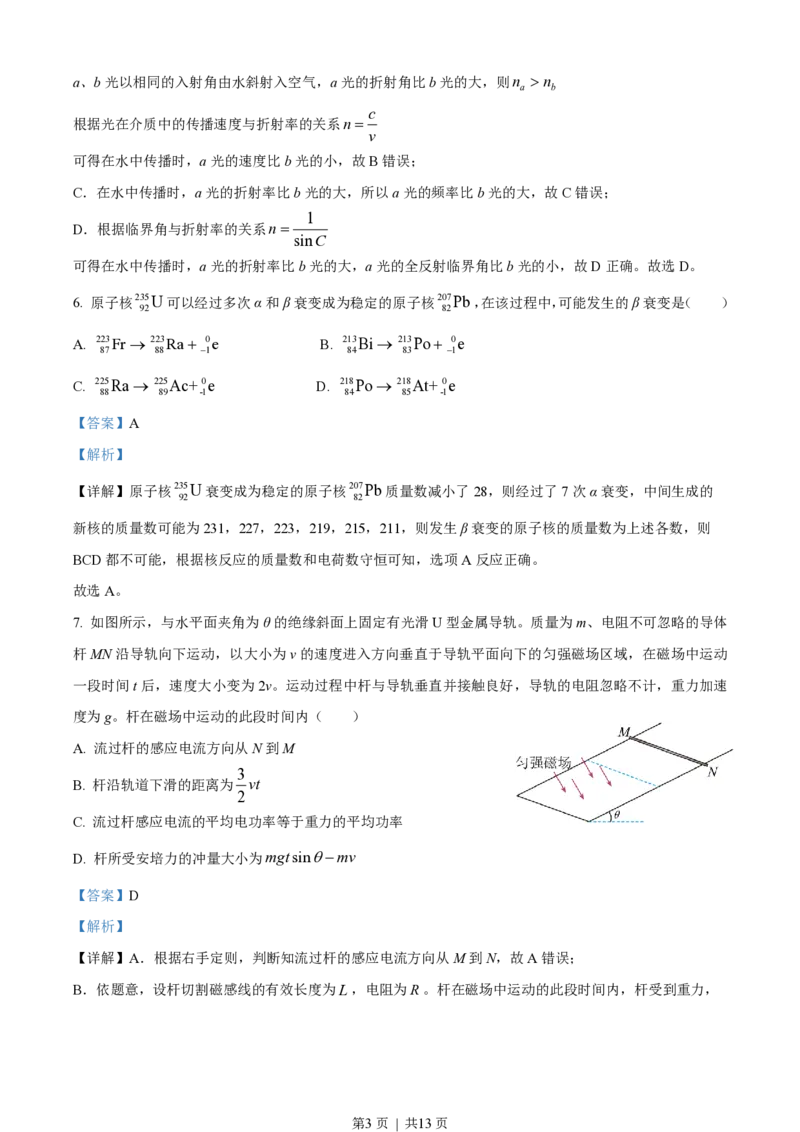
4. 密封于气缸中的理想气体,从状态a依次经过ab、bc和cd三个热力学过程达到状态d。若该气体的体积
V随热力学温度T变化的V-T图像如图所示,则对应的气体压强p随T变化的p-T图像正确的是( )
A. B. C. D.
【答案】C
【解析】
【详解】由V-T图像可知,理想气体ab过程做等压变化,bc过程做等温变化,cd过程做等容变化。根据
pV
理想气体状态方程,有 =C
T
可知bc过程理想气体的体积增大,则压强减小。故选C。
5. 某实验小组利用双缝干涉实验装置分别观察a、b两单色光的干涉条纹,发现在相同的条件下光屏上a光
相邻两亮条纹的间距比b光的小。他们又将a、b光以相同的入射角由水斜射入空气,发现a光的折射角比
b光的大,则( )
A. 在空气中传播时,a光的波长比b光的大
B. 在水中传播时,a光的速度比b光的大
C. 在水中传播时,a光的频率比b光的小
D. 由水射向空气时,a光的全反射临界角比b光的小
【答案】D
【解析】
L
【详解】A.根据相邻两条亮条纹的间距计算公式Dx= l
d
由此可知l n
a b
c
根据光在介质中的传播速度与折射率的关系n=
v
可得在水中传播时,a光的速度比b光的小,故B错误;
C.在水中传播时,a光的折射率比b光的大,所以a光的频率比b光的大,故C错误;
1
D.根据临界角与折射率的关系n=
sinC
可得在水中传播时,a光的折射率比b光的大,a光的全反射临界角比b光的小,故D正确。故选D。
6. 原子核235U可以经过多次α和β衰变成为稳定的原子核207Pb,在该过程中,可能发生的β衰变是( )
92 82
A. 223Fr® 223Ra+ 0e B. 213Bi® 213Po+ 0e
87 88 -1 84 83 -1
C. 225Ra ® 225Ac+ 0e D. 218Po® 218At+ 0e
88 89 -1 84 85 -1
【答案】A
【解析】
【详解】原子核235U衰变成为稳定的原子核207Pb质量数减小了28,则经过了7次α衰变,中间生成的
92 82
新核的质量数可能为231,227,223,219,215,211,则发生β衰变的原子核的质量数为上述各数,则
BCD都不可能,根据核反应的质量数和电荷数守恒可知,选项A反应正确。
故选A。
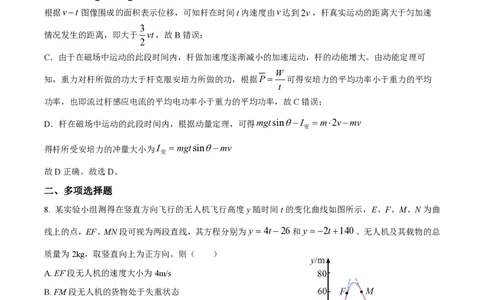
7. 如图所示,与水平面夹角为θ的绝缘斜面上固定有光滑U型金属导轨。质量为m、电阻不可忽略的导体
杆MN沿导轨向下运动,以大小为v的速度进入方向垂直于导轨平面向下的匀强磁场区域,在磁场中运动
一段时间t后,速度大小变为2v。运动过程中杆与导轨垂直并接触良好,导轨的电阻忽略不计,重力加速
度为g。杆在磁场中运动的此段时间内( )
A. 流过杆的感应电流方向从N到M
3
B. 杆沿轨道下滑的距离为 vt
2
C. 流过杆感应电流的平均电功率等于重力的平均功率
D. 杆所受安培力的冲量大小为mgtsinq-mv
【答案】D
【解析】
【详解】A.根据右手定则,判断知流过杆的感应电流方向从M到N,故A错误;
B.依题意,设杆切割磁感线的有效长度为L,电阻为R。杆在磁场中运动的此段时间内,杆受到重力,
第3页 | 共13页轨道支持力及沿轨道向上的安培力作用,根据牛顿第二定律可得mgsinq-F =ma
安
F = BIL
安
BLv
I =
R
B2L2v
联立可得杆的加速度a= gsinq-
R
可知,杆在磁场中运动的此段时间内做加速度逐渐减小的加速运动;若杆做匀加速直线运动,则杆运动的
v+2v 3
距离为s = ×t = vt
2 2
根据v-t 图像围成的面积表示位移,可知杆在时间t内速度由v达到2v,杆真实运动的距离大于匀加速
3
情况发生的距离,即大于 vt,故B错误;
2
C.由于在磁场中运动的此段时间内,杆做加速度逐渐减小的加速运动,杆的动能增大。由动能定理可
W
知,重力对杆所做的功大于杆克服安培力所做的功,根据P= 可得安培力的平均功率小于重力的平均
t
功率,也即流过杆感应电流的平均电功率小于重力的平均功率,故C错误;
D.杆在磁场中运动的此段时间内,根据动量定理,可得mgtsinq-I =m×2v-mv
安
得杆所受安培力的冲量大小为I =mgtsinq-mv
安
故D正确。故选D。
二、多项选择题
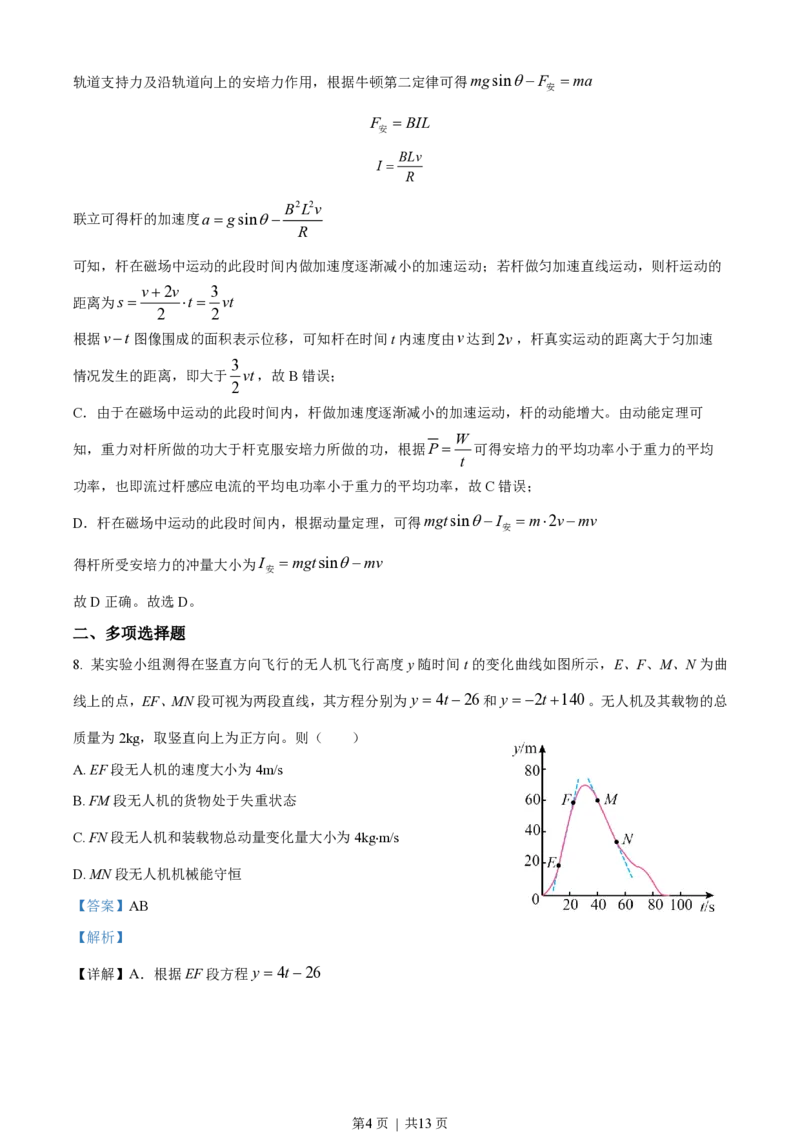
8. 某实验小组测得在竖直方向飞行的无人机飞行高度y随时间t的变化曲线如图所示,E、F、M、N为曲
线上的点,EF、MN段可视为两段直线,其方程分别为 y =4t-26和 y =-2t+140。无人机及其载物的总
质量为2kg,取竖直向上为正方向。则( )
A. EF段无人机的速度大小为4m/s
B. FM段无人机的货物处于失重状态
C. FN段无人机和装载物总动量变化量大小为4kg∙m/s
D. MN段无人机机械能守恒
【答案】AB
【解析】
【详解】A.根据EF段方程 y =4t-26
第4页 | 共13页Dy
可知EF段无人机的速度大小为v= =4m/s,故A正确;
Dt
B.根据y-t图像的切线斜率表示无人机的速度,可知FM段无人机先向上做减速运动,后向下做加速运
动,加速度方向一直向下,则无人机的货物处于失重状态,故B正确;
C.根据MN段方程 y =-2t+140
Dy¢
可知MN段无人机的速度为v¢= =-2m/s
Dt¢
则有Dp=mv¢-mv=2´(-2)kg×m/s-2´4kg×m/s=-12kg×m/s
可知FN段无人机和装载物总动量变化量大小为12kg∙m/s,故C错误;
D.MN段无人机向下做匀速直线运动,动能不变,重力势能减少,无人机的机械能不守恒,故D错误。
故选AB。
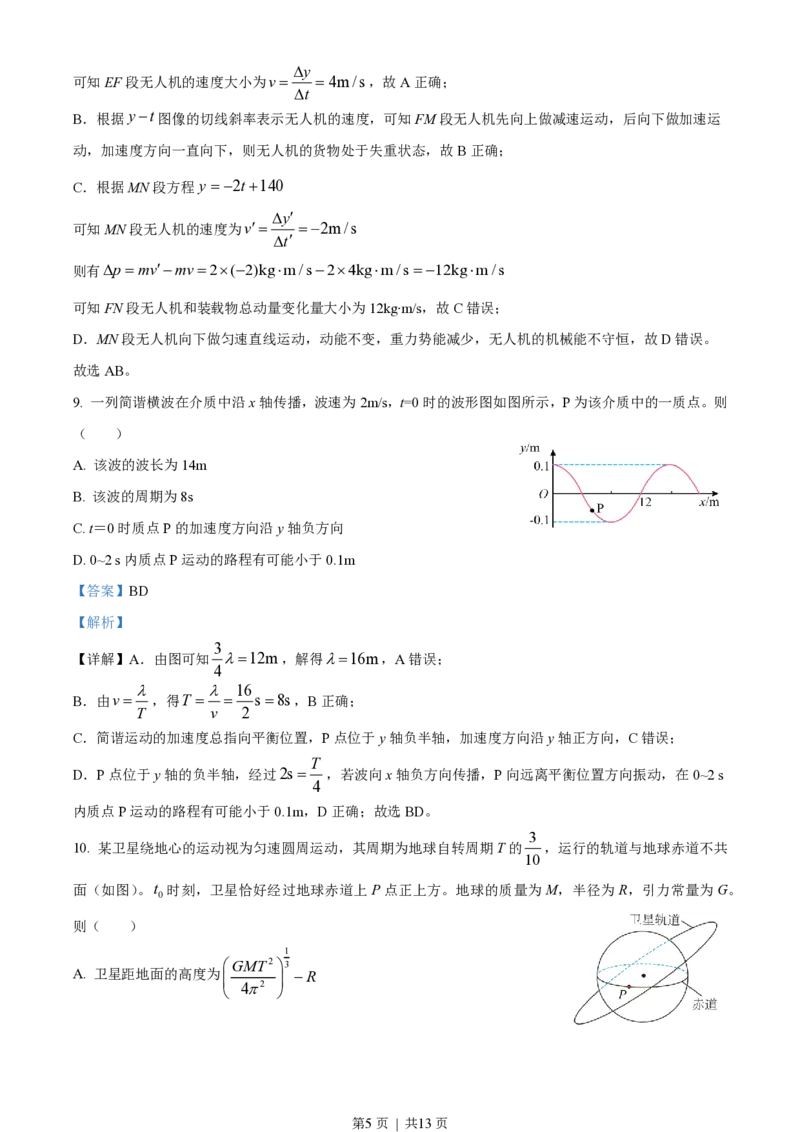
9. 一列简谐横波在介质中沿x轴传播,波速为2m/s,t=0时的波形图如图所示,P为该介质中的一质点。则
( )
A. 该波的波长为14m
B. 该波的周期为8s
C. t=0时质点P的加速度方向沿y轴负方向
D. 0~2 s内质点P运动的路程有可能小于0.1m
【答案】BD
【解析】
3
【详解】A.由图可知 l=12m,解得l=16m,A错误;
4
l l 16
B.由v= ,得T = = s=8s,B正确;
T v 2
C.简谐运动的加速度总指向平衡位置,P点位于y轴负半轴,加速度方向沿y轴正方向,C错误;
T
D.P点位于y轴的负半轴,经过2s= ,若波向x轴负方向传播,P向远离平衡位置方向振动,在0~2 s
4
内质点P运动的路程有可能小于0.1m,D正确;故选BD。
3
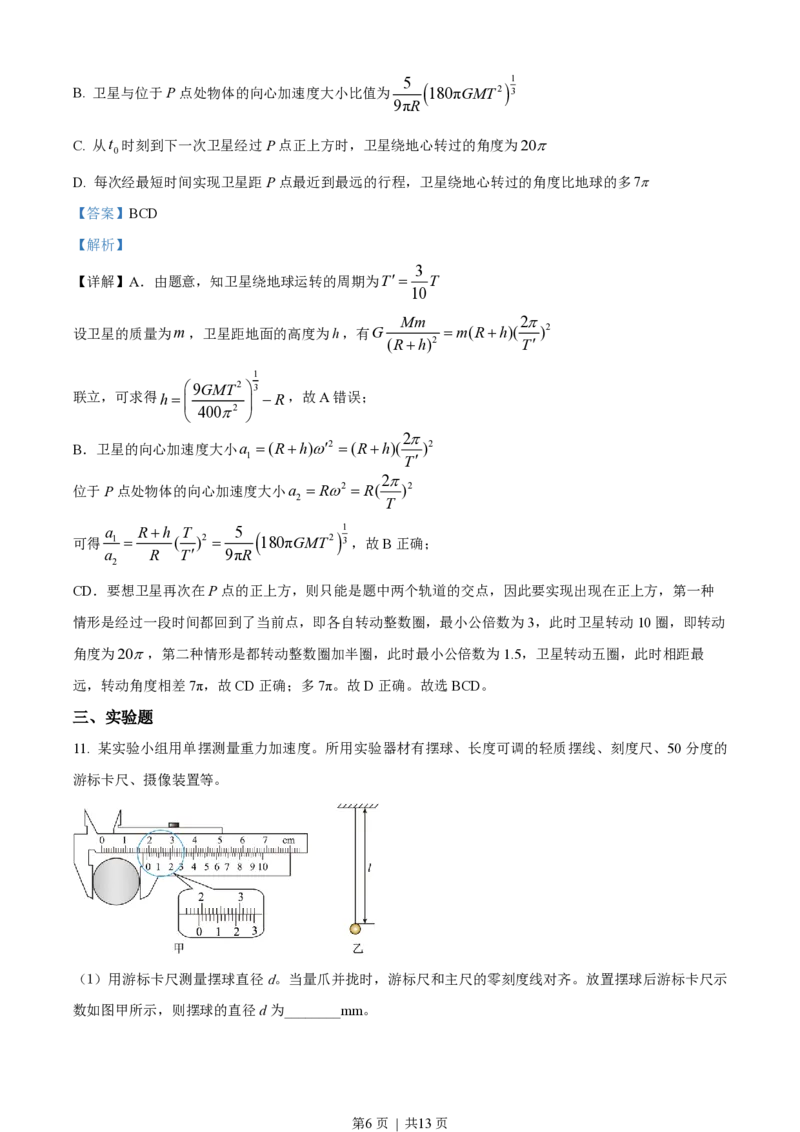
10. 某卫星绕地心的运动视为匀速圆周运动,其周期为地球自转周期T的 ,运行的轨道与地球赤道不共
10
面(如图)。t 时刻,卫星恰好经过地球赤道上P点正上方。地球的质量为M,半径为R,引力常量为G。
0
则( )
1
æGMT2 ö3
A. 卫星距地面的高度为 -R
ç ÷
è
4p2
ø
第5页 | 共13页5 1
B. 卫星与位于P点处物体的向心加速度大小比值为
180πGMT2
3
9πR
C. 从t 时刻到下一次卫星经过P点正上方时,卫星绕地心转过的角度为20p
0
D. 每次经最短时间实现卫星距P点最近到最远的行程,卫星绕地心转过的角度比地球的多7p
【答案】BCD
【解析】
3
【详解】A.由题意,知卫星绕地球运转的周期为T¢= T
10
Mm 2p
设卫星的质量为m,卫星距地面的高度为h,有G =m(R+h)( )2
(R+h)2 T¢
1
æ9GMT2 ö3
联立,可求得h=ç
÷
-R,故A错误;
è
400p2
ø
2p
B.卫星的向心加速度大小a =(R+h)w¢2 =(R+h)( )2
1 T¢
2p
位于P点处物体的向心加速度大小a = Rw2 = R( )2
2 T
a R+h T 5 1
可得 1 = ( )2 = 180πGMT2 3,故B正确;
a R T¢ 9πR
2
CD.要想卫星再次在P点的正上方,则只能是题中两个轨道的交点,因此要实现出现在正上方,第一种
情形是经过一段时间都回到了当前点,即各自转动整数圈,最小公倍数为3,此时卫星转动10圈,即转动
角度为20p,第二种情形是都转动整数圈加半圈,此时最小公倍数为1.5,卫星转动五圈,此时相距最
远,转动角度相差7π,故CD正确;多7π。故D正确。故选BCD。
三、实验题
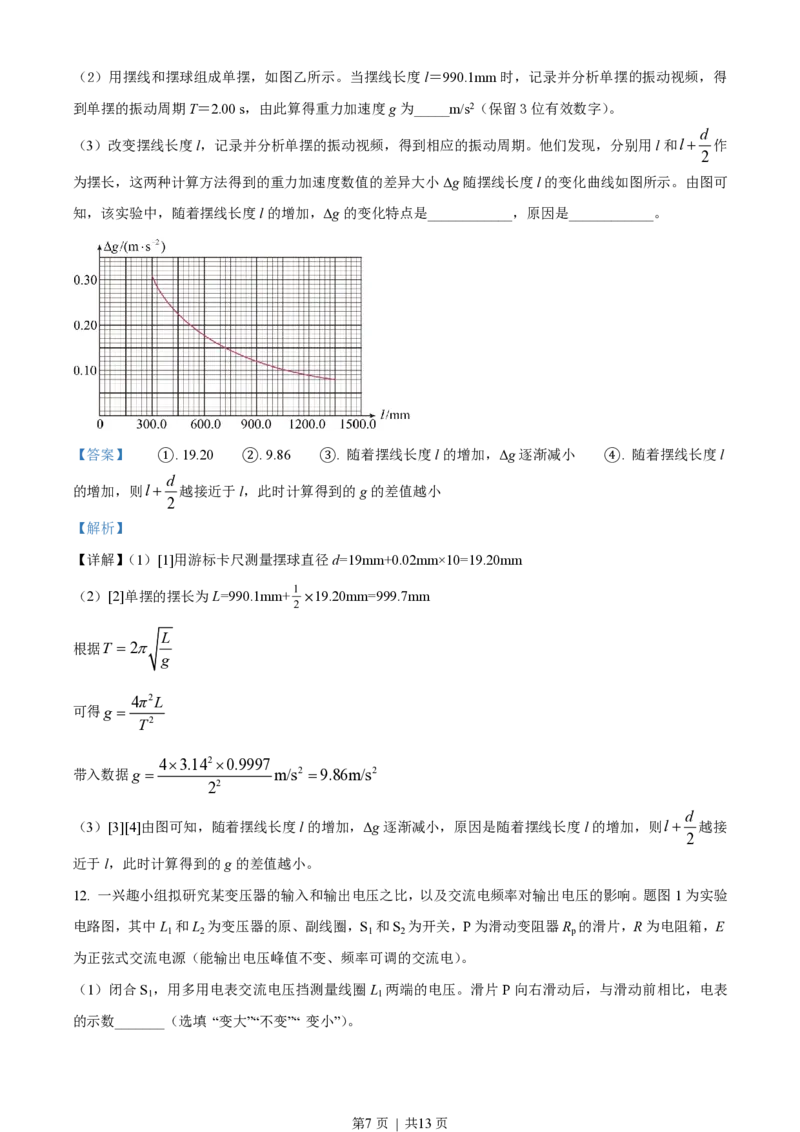
11. 某实验小组用单摆测量重力加速度。所用实验器材有摆球、长度可调的轻质摆线、刻度尺、50分度的
游标卡尺、摄像装置等。
(1)用游标卡尺测量摆球直径d。当量爪并拢时,游标尺和主尺的零刻度线对齐。放置摆球后游标卡尺示
数如图甲所示,则摆球的直径d为________mm。
第6页 | 共13页(2)用摆线和摆球组成单摆,如图乙所示。当摆线长度l=990.1mm时,记录并分析单摆的振动视频,得
到单摆的振动周期T=2.00 s,由此算得重力加速度g为_____m/s2(保留3位有效数字)。
d
(3)改变摆线长度l,记录并分析单摆的振动视频,得到相应的振动周期。他们发现,分别用l和l+ 作
2
为摆长,这两种计算方法得到的重力加速度数值的差异大小Δg随摆线长度l的变化曲线如图所示。由图可
知,该实验中,随着摆线长度l的增加,Δg的变化特点是____________,原因是____________。
【答案】 ①. 19.20 ②. 9.86 ③. 随着摆线长度l的增加,Δg逐渐减小 ④. 随着摆线长度l
d
的增加,则l+ 越接近于l,此时计算得到的g的差值越小
2
【解析】
【详解】(1)[1]用游标卡尺测量摆球直径d=19mm+0.02mm×10=19.20mm
1
(2)[2]单摆的摆长为L=990.1mm+ ×19.20mm=999.7mm
2
L
根据T =2p
g
4π2L
可得g =
T2
4´3.142´0.9997
带入数据g = m/s2 =9.86m/s2
22
d
(3)[3][4]由图可知,随着摆线长度l的增加,Δg逐渐减小,原因是随着摆线长度l的增加,则l+ 越接
2
近于l,此时计算得到的g的差值越小。
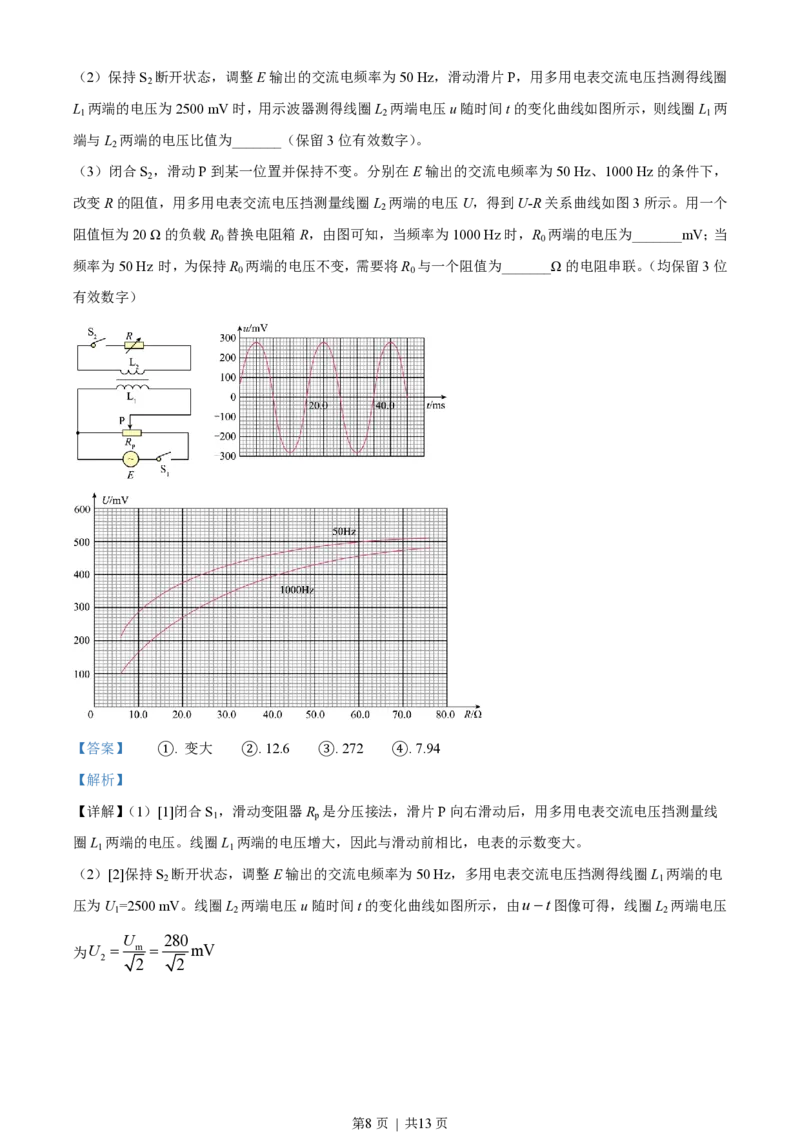
12. 一兴趣小组拟研究某变压器的输入和输出电压之比,以及交流电频率对输出电压的影响。题图1为实验
电路图,其中L 和L 为变压器的原、副线圈,S 和S 为开关,P为滑动变阻器R 的滑片,R为电阻箱,E
1 2 1 2 p
为正弦式交流电源(能输出电压峰值不变、频率可调的交流电)。
(1)闭合S ,用多用电表交流电压挡测量线圈L 两端的电压。滑片P向右滑动后,与滑动前相比,电表
1 1
的示数_______(选填 “变大”“不变”“ 变小”)。
第7页 | 共13页(2)保持S 断开状态,调整E输出的交流电频率为50 Hz,滑动滑片P,用多用电表交流电压挡测得线圈
2
L 两端的电压为2500 mV时,用示波器测得线圈L 两端电压u随时间t的变化曲线如图所示,则线圈L 两
1 2 1
端与L 两端的电压比值为_______(保留3位有效数字)。
2
(3)闭合S ,滑动P到某一位置并保持不变。分别在E输出的交流电频率为50 Hz、1000 Hz的条件下,
2
改变R的阻值,用多用电表交流电压挡测量线圈L 两端的电压U,得到U-R关系曲线如图3所示。用一个
2
阻值恒为20 Ω的负载R 替换电阻箱R,由图可知,当频率为1000 Hz时,R 两端的电压为_______mV;当
0 0
频率为50 Hz 时,为保持R 两端的电压不变,需要将R 与一个阻值为_______Ω的电阻串联。(均保留3位
0 0
有效数字)
【答案】 ①. 变大 ②. 12.6 ③. 272 ④. 7.94
【解析】
【详解】(1)[1]闭合S ,滑动变阻器R 是分压接法,滑片P向右滑动后,用多用电表交流电压挡测量线
1 p
圈L 两端的电压。线圈L 两端的电压增大,因此与滑动前相比,电表的示数变大。
1 1
(2)[2]保持S 断开状态,调整E输出的交流电频率为50 Hz,多用电表交流电压挡测得线圈L 两端的电
2 1
压为U =2500 mV。线圈L 两端电压u随时间t的变化曲线如图所示,由u-t图像可得,线圈L 两端电压
1 2 2
U 280
为U = m = mV
2
2 2
第8页 | 共13页U 2500
1 = =12.6
则线圈L 两端与L 两端的电压比值为U 280
1 2 2
2
(3)[3]闭合S ,滑动P到某一位置并保持不变。由U−R关系曲线可得,当频率为1000 Hz时,当负载电
2
阻R =20 Ω时,R 两端的电压为U =272mV。
0 0 R0
[4]当频率为50 Hz 时,由U−R关系曲线可得线圈L 两端的电压为U'=380mV。要保持R 两端的电压不
2 0
U¢-U 380-272
R = R0 = W=7.94W
变,需给R 串联一电阻,此串联电阻值为 串 U 272
0 R0
R 20
0
四、计算题
13. 机械臂广泛应用于机械装配。若某质量为m的工件(视为质点)被机械臂抓取后,在竖直平面内由静
止开始斜向上做加速度大小为a的匀加速直线运动,运动方向与竖直方向夹角为θ,提升高度为h,如图所
示。求:
(1)提升高度为h时,工件的速度大小;
(2)在此过程中,工件运动的时间及合力对工件做的功。
2ah 2h mah
【答案】(1) ;(2) ,
cosq acosq cosq
【解析】
h 2ah
【详解】(1)根据匀变速直线运动位移与速度关系有v2 =2a ,解得v =
0 cosq 0 cosq
2h
(2)根据速度公式有v =at ,解得t =
0
acosq
1 mah
根据动能定理有W = mv2,解得W =
合 2 0 合 cosq
14. 如图所示,桌面上固定有一半径为R的水平光滑圆轨道,M、N为轨道上的两点,且位于同一直径上,
P为MN段的中点。在P点处有一加速器(大小可忽略),小球每次经过P点后,其速度大小都增加v 。质
0
量为m的小球1从N处以初速度v 沿轨道逆时针运动,与静止在M处的小球2发生第一次弹性碰撞,碰
0
后瞬间两球速度大小相等。忽略每次碰撞时间。求:
(1)球1第一次经过P点后瞬间向心力的大小;
第9页 | 共13页(2)球2的质量;
(3)两球从第一次碰撞到第二次碰撞所用时间。
v2 5pR
【答案】(1)4m 0 ;(2)3m;(3)
R 6v
0
【解析】
(2v )2 v2
【详解】(1)球1第一次经过P点后瞬间速度变为2v ,所以F =m 0 =4m 0
0 n R R
(2)球1与球2发生弹性碰撞,且碰后速度大小相等,说明球1碰后反弹,则m×2v =-mv+m¢v
0
1 1 1
m(2v )2 = mv2 + m¢v2
2 0 2 2
联立解得v=v ,m¢=3m
0
pR
(3)设两球从第一次碰撞到第二次碰撞所用时间为Δt,则t =
1 2v
0
v t +2v t =pR
0 2 0 2
5pR
所以Dt =t +t =
1 2 6v
0
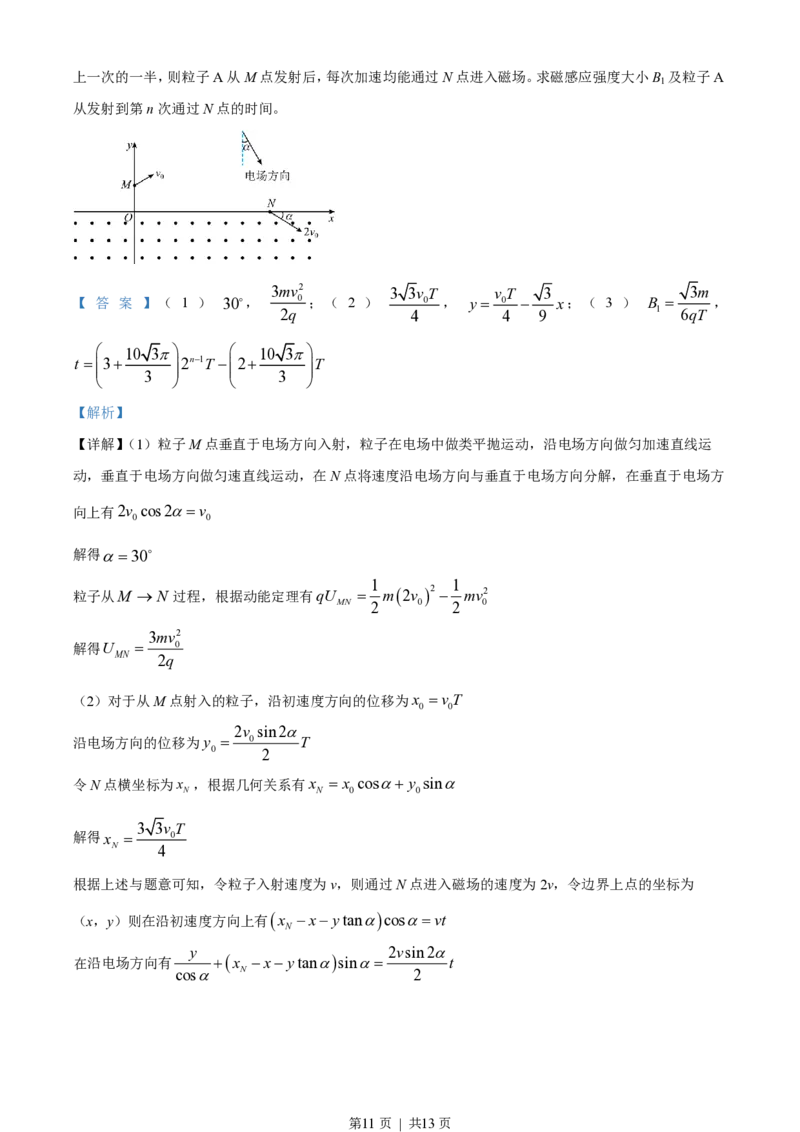
15. 某同学设计了一种粒子加速器的理想模型。如图所示,xOy平面内,x轴下方充满垂直于纸面向外的匀
强磁场,x轴上方被某边界分割成两部分,一部分充满匀强电场(电场强度与y轴负方向成α角),另一部
分无电场,该边界与y轴交于M点,与x轴交于N点。只有经电场到达N点、与x轴正方向成α角斜向下
q
运动的带电粒子才能进入磁场。从M点向电场内发射一个比荷为 的带电粒子A,其速度大小为v 、方向
0
m
与电场方向垂直,仅在电场中运动时间T后进入磁场,且通过N点的速度大小为2v 。忽略边界效应,不计
0
粒子重力。
(1)求角度α及M、N两点的电势差。
q
(2)在该边界上任意位置沿与电场垂直方向直接射入电场内的、比荷为 的带电粒子,只要速度大小适当,
m
就能通过N点进入磁场,求N点横坐标及此边界方程。
(3)若粒子A第一次在磁场中运动时磁感应强度大小为B ,以后每次在磁场中运动时磁感应强度大小为
1
第10页 | 共13页上一次的一半,则粒子A从M点发射后,每次加速均能通过N点进入磁场。求磁感应强度大小B 及粒子A
1
从发射到第n次通过N点的时间。
3mv2 3 3v T v T 3 3m
【 答 案 】( 1 ) 30o, 0 ;( 2 ) 0 , y = 0 - x;( 3 ) B = ,
2q 4 4 9 1 6qT
æ 10 3pö æ 10 3pö
t =ç3+ ÷2n-1T -ç2+ ÷T
ç ÷ ç ÷
3 3
è ø è ø
【解析】
【详解】(1)粒子M点垂直于电场方向入射,粒子在电场中做类平抛运动,沿电场方向做匀加速直线运
动,垂直于电场方向做匀速直线运动,在N点将速度沿电场方向与垂直于电场方向分解,在垂直于电场方
向上有2v cos2a=v
0 0
解得a=30o
1 1
粒子从M ® N 过程,根据动能定理有qU = m2v 2 - mv2
MN 2 0 2 0
3mv2
解得U = 0
MN 2q
(2)对于从M点射入的粒子,沿初速度方向的位移为x =v T
0 0
2v sin2a
沿电场方向的位移为y = 0 T
0 2
令N点横坐标为x ,根据几何关系有x = x cosa+ y sina
N N 0 0
3 3v T
解得x = 0
N 4
根据上述与题意可知,令粒子入射速度为v,则通过N点进入磁场的速度为2v,令边界上点的坐标为
(x,y)则在沿初速度方向上有 x -x- ytanacosa=vt
N
y 2vsin2a
在沿电场方向有 +x -x- ytanasina= t
cosa N 2
第11页 | 共13页v T 3
解得y = 0 - x
4 9
U
(3)由上述结果可知电场强度E = MN
y
0
3mv
解得E = 0
qT
设粒子A第n次在磁场中做圆周运动的线速度为v ,可得第n+1次在N点进入磁场的速度为
n
v
v = n =2v
n+1 cos2a n
第一次在N点进入磁场的速度大小为2v
0
,可得v
n
=2nv
0
,(n=1,2,3
L
)
B
设粒子A第n次在磁场中运动时的磁感应强度为B
n
,由题意可得B
n
=
2n
1
-1
,(n=1,2,3
L
)
v2
由洛伦兹力提供向心力得qv B =m n
n n r
n
4nmv
联立解得r = 0
n 2qB
1
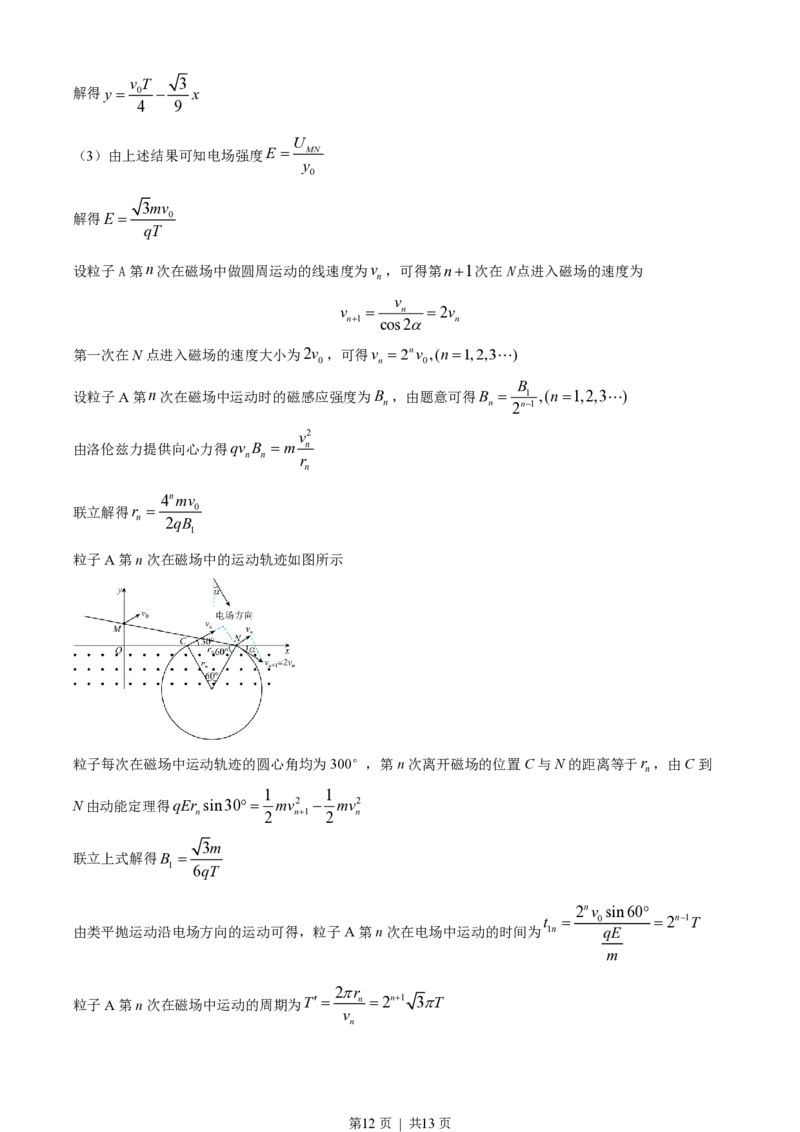
粒子A第n次在磁场中的运动轨迹如图所示
粒子每次在磁场中运动轨迹的圆心角均为300°,第n次离开磁场的位置C与N的距离等于r ,由C到
n
1 1
N由动能定理得qEr sin30°= mv2 - mv2
n 2 n+1 2 n
3m
联立上式解得B =
1 6qT
2nv sin60°
t = 0 =2n-1T
由类平抛运动沿电场方向的运动可得,粒子A第n次在电场中运动的时间为 1n qE
m
2pr
粒子A第n次在磁场中运动的周期为T¢= n =2n+1 3pT
v
n
第12页 | 共13页300° 5
粒子A第n次在磁场中运动的时间为t = T¢= ×2n+1 3pT
2n 360° 6
设粒子A第n次在电场边界MN与x轴之间的无场区域的位移为x ,边界与x轴负方向的夹角为b,则
n
3 1
根据边界方程可得tanb= ,sinb=
9 2 7
x r
由正弦定理可得 n = n
sinb sin180°-30°-b
4nv T
解得x = 0
n 2
x
粒子A第n次在电场边界MN与x轴之间运动的时间为t = n =2n-1T
3n v
n
粒子A从发射到第n次通过N点的过程,在电场中运动n次,在磁场和无场区域中均运动n-1次,则所求
5
时间t = 20 +21+ +2n-1 T + × 3pT 22 +23 + +2n + 20 +21+ +2n-2 T
L L L
6
5
由等比数列求和得t = 2n -1 T + × 3pT é4 2n-1-1 ù+ 2n-1-1 T
ë û
6
æ 10 3pö æ 10 3pö
解得t =ç3+ ÷2n-1T -ç2+ ÷T
ç ÷ ç ÷
3 3
è ø è ø
第13页 | 共13页
