
文档内容
模板 02 相互作用(两大题型)
本节导航:
题型01 平衡问题 题型02 平衡中的临界和极值问题
题型 01 平衡问题
1、平衡问题主要以与生活、生产、高科技密切联系进行命题,如以生活、劳动为情境,考查受力
分析和共点力平衡等,试题的呈现形式丰富,提问角度设置新颖。在解决此类问题时要将所学物理知识
与实际情境联系起来,抓住问题实质,将问题转化为熟知的物理模型和物理过程求解。
2、组合体的平衡问题也是高考的高频考点,一般为两个或两个以上的物体通过轻绳、轻杆或者轻
弹簧等连接在一起组成一个组合体。该题型的难度在于受力分析,往往容易多力、漏力和错力。
一、必备基础知识
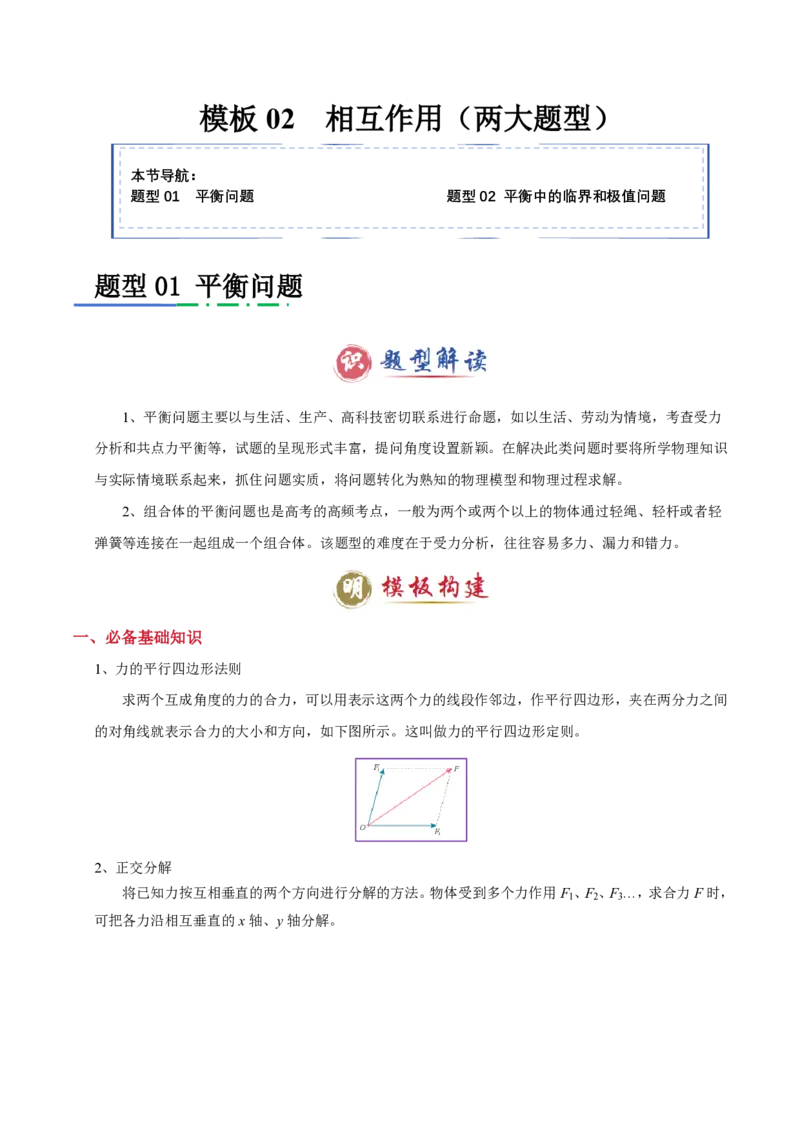
1、力的平行四边形法则
求两个互成角度的力的合力,可以用表示这两个力的线段作邻边,作平行四边形,夹在两分力之间
的对角线就表示合力的大小和方向,如下图所示。这叫做力的平行四边形定则。
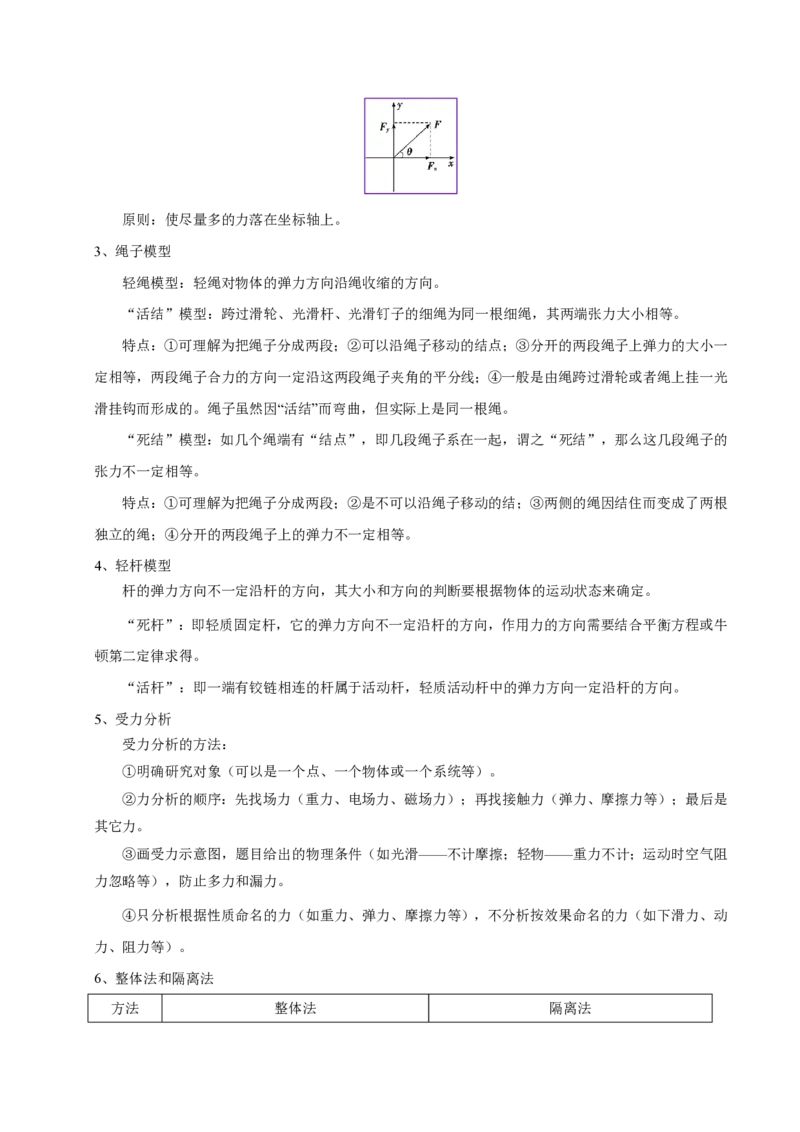
2、正交分解
将已知力按互相垂直的两个方向进行分解的方法。物体受到多个力作用F 、F 、F …,求合力F时,
1 2 3
可把各力沿相互垂直的x轴、y轴分解。原则:使尽量多的力落在坐标轴上。
3、绳子模型
轻绳模型:轻绳对物体的弹力方向沿绳收缩的方向。
“活结”模型:跨过滑轮、光滑杆、光滑钉子的细绳为同一根细绳,其两端张力大小相等。
特点:①可理解为把绳子分成两段;②可以沿绳子移动的结点;③分开的两段绳子上弹力的大小一
定相等,两段绳子合力的方向一定沿这两段绳子夹角的平分线;④一般是由绳跨过滑轮或者绳上挂一光
滑挂钩而形成的。绳子虽然因“活结”而弯曲,但实际上是同一根绳。
“死结”模型:如几个绳端有“结点”,即几段绳子系在一起,谓之“死结”,那么这几段绳子的
张力不一定相等。
特点:①可理解为把绳子分成两段;②是不可以沿绳子移动的结;③两侧的绳因结住而变成了两根
独立的绳;④分开的两段绳子上的弹力不一定相等。
4、轻杆模型
杆的弹力方向不一定沿杆的方向,其大小和方向的判断要根据物体的运动状态来确定。
“死杆”:即轻质固定杆,它的弹力方向不一定沿杆的方向,作用力的方向需要结合平衡方程或牛
顿第二定律求得。
“活杆”:即一端有铰链相连的杆属于活动杆,轻质活动杆中的弹力方向一定沿杆的方向。
5、受力分析
受力分析的方法:
①明确研究对象(可以是一个点、一个物体或一个系统等)。
②力分析的顺序:先找场力(重力、电场力、磁场力);再找接触力(弹力、摩擦力等);最后是
其它力。
③画受力示意图,题目给出的物理条件(如光滑——不计摩擦;轻物——重力不计;运动时空气阻
力忽略等),防止多力和漏力。
④只分析根据性质命名的力(如重力、弹力、摩擦力等),不分析按效果命名的力(如下滑力、动
力、阻力等)。
6、整体法和隔离法
方法 整体法 隔离法将相互关联的各个物体看成一个整体的 将某物体从周围物体中隔离出来,单独分析
定义
方法。 该物体的方法。
研究系统外的物体对系统整体的作用力
选用原则 研究系统内部各物体之间的相互作用力
或者系统整体的加速度
受力分析时不考虑系统内各物体之间的
注意 一般情况下先隔离受力较少的物体。
相互作用力。
说明:当分析相互作用的两个或两个以上物体整体的受力情况及分析外力对系统的作用时,宜用整
体法;而在分析系统内各物体(或一个物体各部分)间的相互作用时,宜用隔离法。
7、平衡的情形
静态平衡:作用于物体上的合力为零时,物体没有加速度,此时物体保持静止或匀速运动。
静止与速度v=0不是一回事。物体保持静止状态,说明v=0,a=0,两者同时成立。若仅是v=0,
a≠0,如自由下落开始时刻的物体,并非处于平衡状态。
两种类型如下表所示。
两种情形 受力情况 速度和加速度
静止状态 共点力作用 v=0,a=0
匀速直线运动 共点力作用 V=C,a=0
动态平衡:指通过控制某些物理量,使物体的状态发生缓慢的变化,而在这个过程中物体始终处于
一系列的平衡状态。
动态平衡的基本思路:化“动”为“静”,“静”中求“动”。物理学中的“缓慢移动”一般可理
解为动态平衡。
解决动态平衡问题的关键:抓住不变量,确定自变量,依据不变量与自变量的关系来确定其他量的
变化规律。
二、解题模板
1、解题思路
2、注意问题
整体法和隔离法并不是完全独立的,求解过程往往要多次选取研究对象,交替使用这两种方法。
当分析相互作用的两个或两个以上物体整体的受力情况及分析外力对系统的作用时,宜用整体法。
在分析系统内各物体(或一个物体各部分)间的相互作用时常用隔离法。
3、解题方法
静态平衡:①合成法:物体受三个共点力的作用而平衡,则任意两个力的合力一定与第三个力大小相等,方向
相反。
②分解法:物体受三个共点力的作用而平衡,将某一个力按力的效果分解,则其分力和其他两个力
满足平衡条件。
③正交分解法:物体受到三个或三个以上力的作用而平衡,将物体所受的力分解为相互垂直的两组,
每组力都满足平衡条件。
④力的三角形法:对受三个力作用而平衡的物体,将力的矢量图平移使三个力组成一个首尾依次相
接的矢量三角形,根据正弦定理、余弦定理或相似三角形等数学知识求解未知力。
动态平衡:
①解析法:如果物体受到多个力的作用,可进行正交分解,利用解析法,建立平衡方程,因变量与
自变量的一般函数表达式,根据自变量的变化确定因变量的变化。还可由数学知识求极值或者根据物理
临界条件求极值。
分析的关键:抓住不变量,确定自变量,依据不变量与自变量的关系(通常为三角函数关系)来确
定其他量的变化规律。
解题步骤:明确研究对象,确定研究状态,对物体进行受力分析;将物体受的力按实际效果分解或
正交分解;列平衡方程求出未知量与已知量的关系表达式;根据已知量的变化情况来确定未知量的变化
情况。
②图解法:此法常用于求解三力平衡且有一个力是恒力、另有一个力方向不变的问题。
分析的关键:
受力分析 画不同状态下的 确定力的变化
平衡图
•化“动” 为 •“静中求“动”
“静”
对研究对象在动态变化过程中的若干状态进行受力分析,在同一图中做出物体在若干状态下所受的
力的平行四边形,由各边的长度变化及角度变化来确定力的大小及方向的变化。
解题步骤:明确研究对象,确定研究状态,对物体进行受力分析;根据平衡条件画出平行四边形;
根据已知量的变化情况,画出平行四边形的边角变化;确定未知量大小、方向的变化。
在处理动态平衡问题时,注意图解法和解析法的适用特征。图解法适用于“两个不变”类问题,且
仅限于定性分析,此法直观、简单。解析法多用于定量计算或用图解法不易解决的问题。此法对数学能
力要求较高,且繁琐。但分析问题严谨。需特别提醒的是图解法作图一定要规范,且不可随意乱画。
③相似三角形:一个力恒定、另外两个力的方向同时变化,当所作“力的矢量三角形”与空间的某个
“几何三角形”总相似时用此法。
解题步骤:物体受三个力平衡时,将物体受的这三个力通过平移可以组成封闭的三角形,这个三角形是矢量三角形,如果通过画辅助线可以得到一个几何三角形,并且这两个三角形相似,则可以用相似
三角形法解答这类平衡问题。
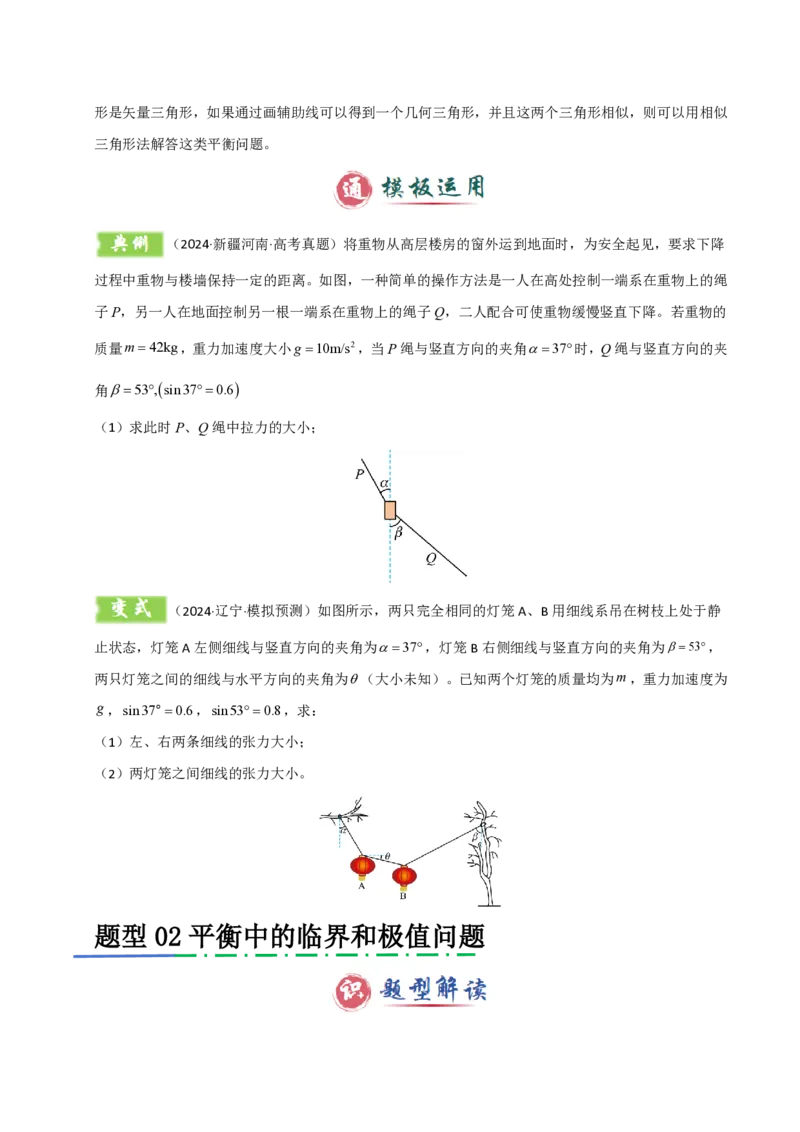
(2024·新疆河南·高考真题)将重物从高层楼房的窗外运到地面时,为安全起见,要求下降
过程中重物与楼墙保持一定的距离。如图,一种简单的操作方法是一人在高处控制一端系在重物上的绳
子P,另一人在地面控制另一根一端系在重物上的绳子Q,二人配合可使重物缓慢竖直下降。若重物的
质量m42kg,重力加速度大小g 10m/s2,当P绳与竖直方向的夹角37时,Q绳与竖直方向的夹
角53,sin370.6
(1)求此时P、Q绳中拉力的大小;
(2024·辽宁·模拟预测)如图所示,两只完全相同的灯笼A、B用细线系吊在树枝上处于静
止状态,灯笼A左侧细线与竖直方向的夹角为37,灯笼B右侧细线与竖直方向的夹角为53,
两只灯笼之间的细线与水平方向的夹角为(大小未知)。已知两个灯笼的质量均为m,重力加速度为
g,sin37°0.6,sin530.8,求:
(1)左、右两条细线的张力大小;
(2)两灯笼之间细线的张力大小。
题型 02 平衡中的临界和极值问题1、平衡问题中的难度题型往往就是临界问题和极值问题,题意会出现“恰好出现”或“恰好不出
现”的条件,或者求某个力的最大值、最小值或者取值范围。
2、这类题型对学生的受力分析能力和过程分析能力以及数学能力要求较高,找准条件是解题的关
键。
一、必备基础知识
1、临界问题
由某种物理现象变化为另一种物理现象或由某种物理状态变化为另一种物理状态时,发生转折的状
态叫临界状态,临界状态可以理解为“恰好出现”或“恰好不出现”某种现象的状态。在问题的描述中
常用“刚好”、“刚能”、“恰好”等语言叙述。解题的关键是确定“恰好出现”或“恰好不出现”的
条件。
2、极值问题
平衡物体的极值,一般指在力的变化过程中的最大值和最小值问题。极值是指研究平衡问题中某物
理量变化情况时出遭到的最大值或最小值。可分为简单极值问题和条件极值问题。
二、解题模板
1、解题思路
2、注意问题
首先要正确地进行受力分析和变化过程分析,找出平衡的临界点和极值点;临界条件必须在变化中
去寻找,不能停留在一个状态来研究临界问题,而要把某个物理量推向极端,即极大和极小。
常见的临界状态:①两接触物体脱离与不脱离的临界条件是相互作用力为0(主要体现为两物体间
的弹力为0);②绳子断与不断的临界条件为绳中的张力达到最大值;绳子绷紧与松弛的临界条件为绳
中的张力为0;③存在摩擦力作用的两物体间发生相对滑动或相对静止的临界条件为静摩擦力达到最大
值。
求解平衡中的临界问题和极值问题时,首先要正确地进行受力分析和变化过程分析,找出平衡中的
临界点和极值点。
临界条件必须在变化中寻找,不能停留在一个状态来研究临界问题,而是要把某个物理量推向极端,即极大或极小,并依此得出科学的推理分析,从而给出判断或结论。
3、解题方法
①极限分析法:一种处理临界问题的有效方法,它是指通过恰当选取某个变化的物理量将问题推向
极端(“极大”、“极小”、“极右”、“极左”等),从而把比较隐蔽的临界现象暴露出来,使问题
明朗化,便于分析求解。临界条件必须在变化中去寻找,不能停留在一个状态来研究临界问题,而要把
某个物理量推向极端,即极大和极小,并依次做出科学的推理分析,从而给出判断或导出一般结论。
②假设分析法:临界问题存在多种可能,特别是非此即彼两种可能时,或变化过程中可能出现临界
条件,也可能不出现临界条件时,往往用假设法解决问题。
③物理分析方法:根据物体的平衡条件,做出力的矢量图,通过对物理过程的分析,利用平行四边
形定则进行动态分析,确定最大值与最小值。
④数学极值法:通过对问题的分析,依据物体的平衡条件写出物理量之间的函数关系或画出函数图
像,用数学方法求极值如求二次函数极值、公式极值、三角函数极值,但利用数学方法求出极值后,
一定要依据物理原理对该值的合理性及物理意义进行讨论和说明。
⑤图解法:根据平衡条件做出力的矢量图,如只受三个力,则这三个力将构成封闭矢量三角形,然后根
据矢量图进行动态分析,确定最大值和最小值。
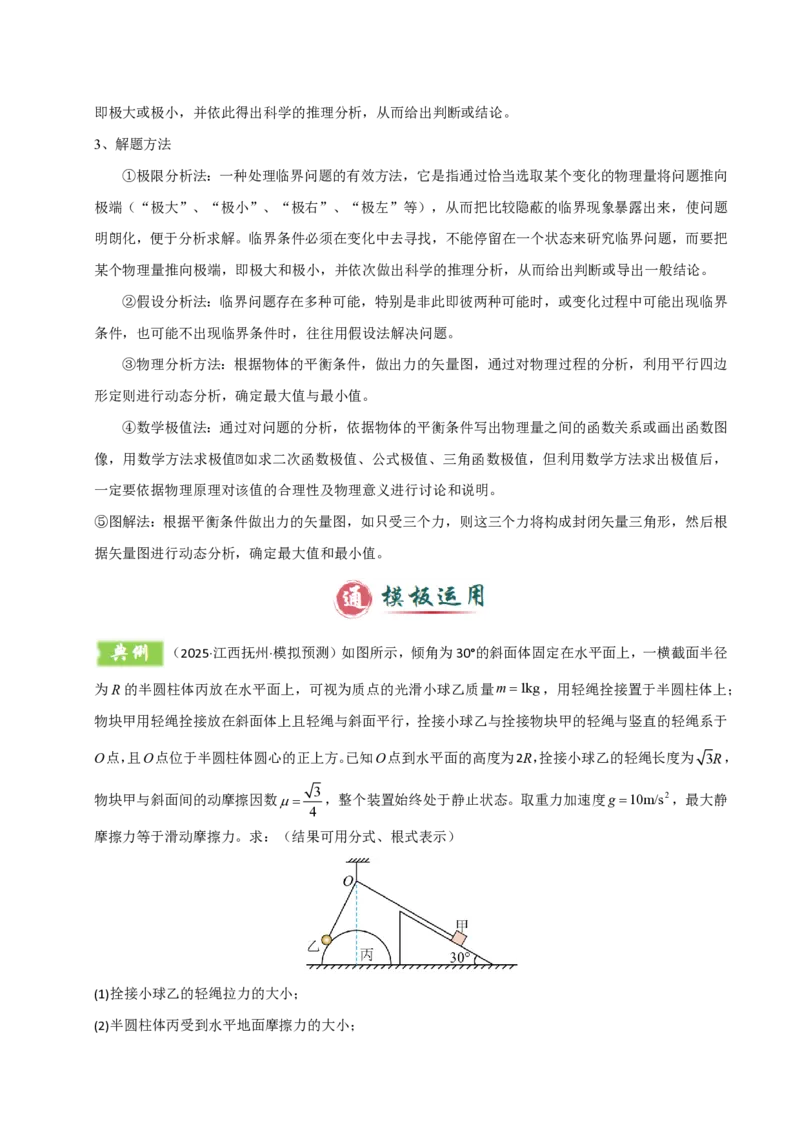
(2025·江西抚州·模拟预测)如图所示,倾角为30°的斜面体固定在水平面上,一横截面半径
为R的半圆柱体丙放在水平面上,可视为质点的光滑小球乙质量m1kg,用轻绳拴接置于半圆柱体上;
物块甲用轻绳拴接放在斜面体上且轻绳与斜面平行,拴接小球乙与拴接物块甲的轻绳与竖直的轻绳系于
O点,且O点位于半圆柱体圆心的正上方。已知O点到水平面的高度为2R,拴接小球乙的轻绳长度为 3R,
3
物块甲与斜面间的动摩擦因数 ,整个装置始终处于静止状态。取重力加速度g 10m/s2,最大静
4
摩擦力等于滑动摩擦力。求:(结果可用分式、根式表示)
(1)拴接小球乙的轻绳拉力的大小;
(2)半圆柱体丙受到水平地面摩擦力的大小;(3)物块甲质量的取值范围。
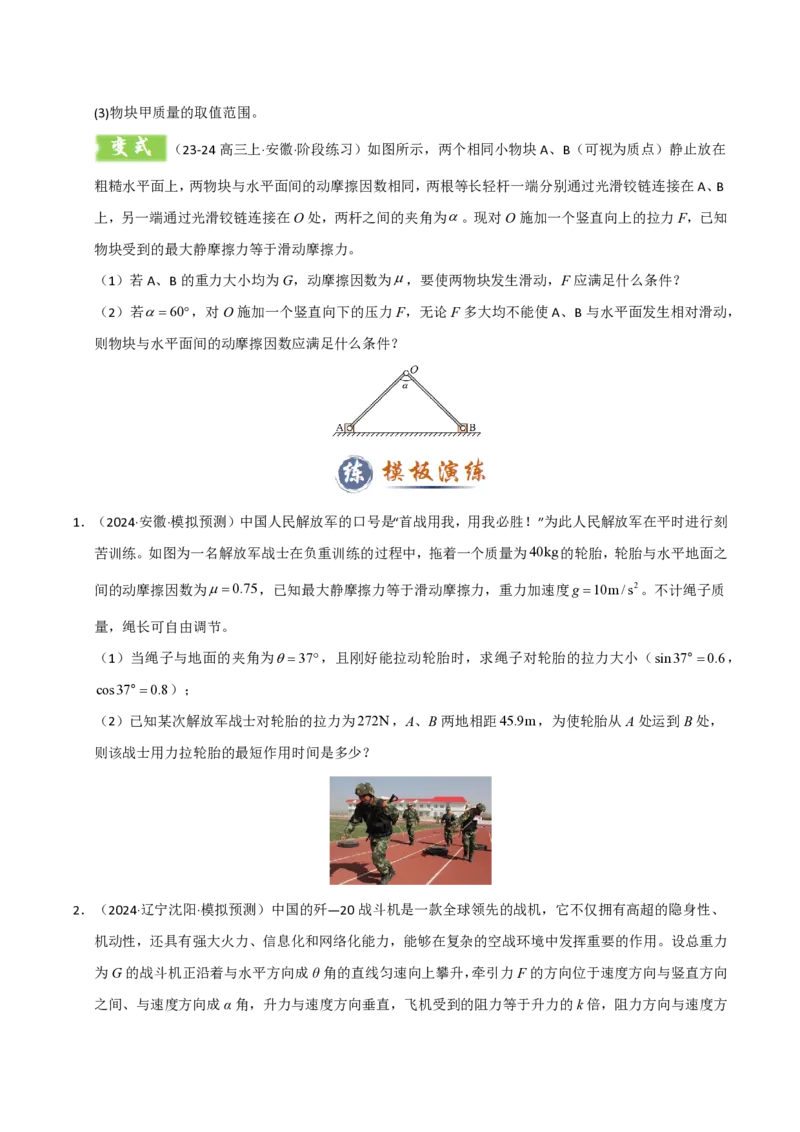
(23-24高三上·安徽·阶段练习)如图所示,两个相同小物块A、B(可视为质点)静止放在
粗糙水平面上,两物块与水平面间的动摩擦因数相同,两根等长轻杆一端分别通过光滑铰链连接在A、B
上,另一端通过光滑铰链连接在O处,两杆之间的夹角为。现对O施加一个竖直向上的拉力F,已知
物块受到的最大静摩擦力等于滑动摩擦力。
(1)若A、B的重力大小均为G,动摩擦因数为,要使两物块发生滑动,F应满足什么条件?
(2)若60,对O施加一个竖直向下的压力F,无论F多大均不能使A、B与水平面发生相对滑动,
则物块与水平面间的动摩擦因数应满足什么条件?
1.(2024·安徽·模拟预测)中国人民解放军的口号是“首战用我,用我必胜!”为此人民解放军在平时进行刻
苦训练。如图为一名解放军战士在负重训练的过程中,拖着一个质量为40kg的轮胎,轮胎与水平地面之
间的动摩擦因数为0.75,已知最大静摩擦力等于滑动摩擦力,重力加速度g 10m/s2。不计绳子质
量,绳长可自由调节。
(1)当绳子与地面的夹角为37,且刚好能拉动轮胎时,求绳子对轮胎的拉力大小(sin37°0.6,
cos37°0.8);
(2)已知某次解放军战士对轮胎的拉力为272N,A、B两地相距45.9m,为使轮胎从A处运到B处,
则该战士用力拉轮胎的最短作用时间是多少?
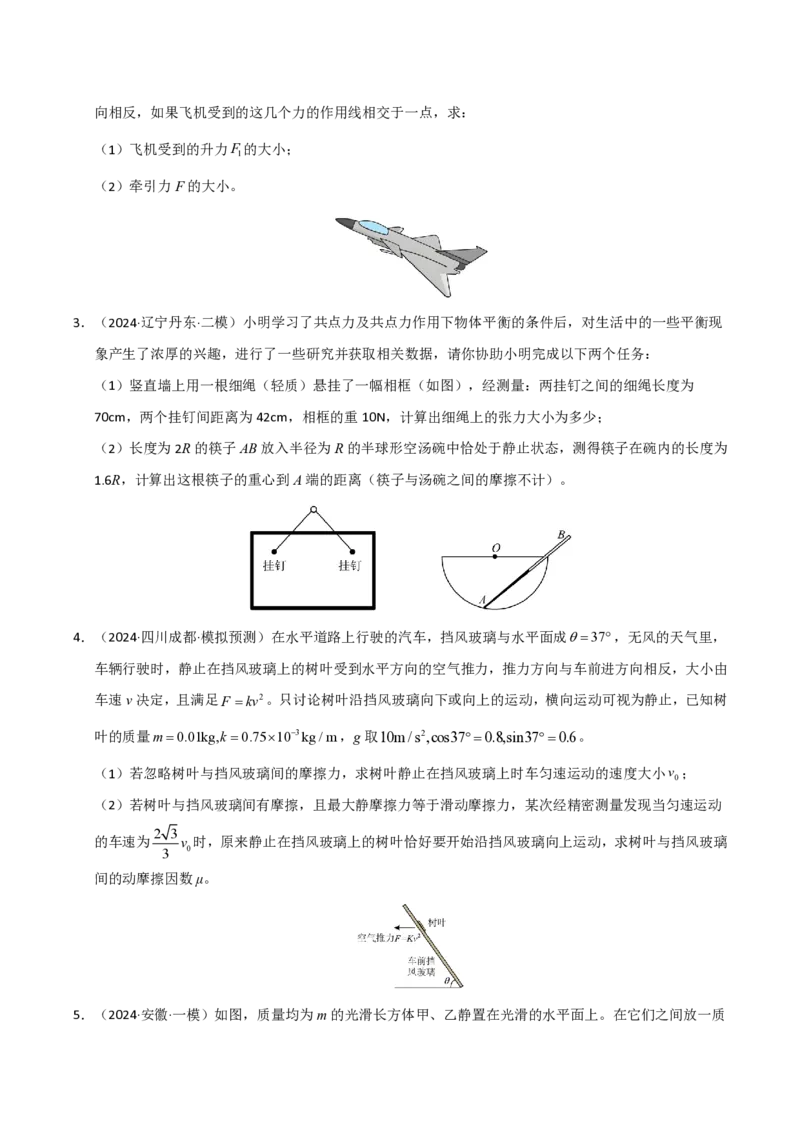
2.(2024·辽宁沈阳·模拟预测)中国的歼—20战斗机是一款全球领先的战机,它不仅拥有高超的隐身性、
机动性,还具有强大火力、信息化和网络化能力,能够在复杂的空战环境中发挥重要的作用。设总重力
为G的战斗机正沿着与水平方向成θ角的直线匀速向上攀升,牵引力F的方向位于速度方向与竖直方向
之间、与速度方向成α角,升力与速度方向垂直,飞机受到的阻力等于升力的k倍,阻力方向与速度方向相反,如果飞机受到的这几个力的作用线相交于一点,求:
(1)飞机受到的升力F 的大小;
1
(2)牵引力F的大小。
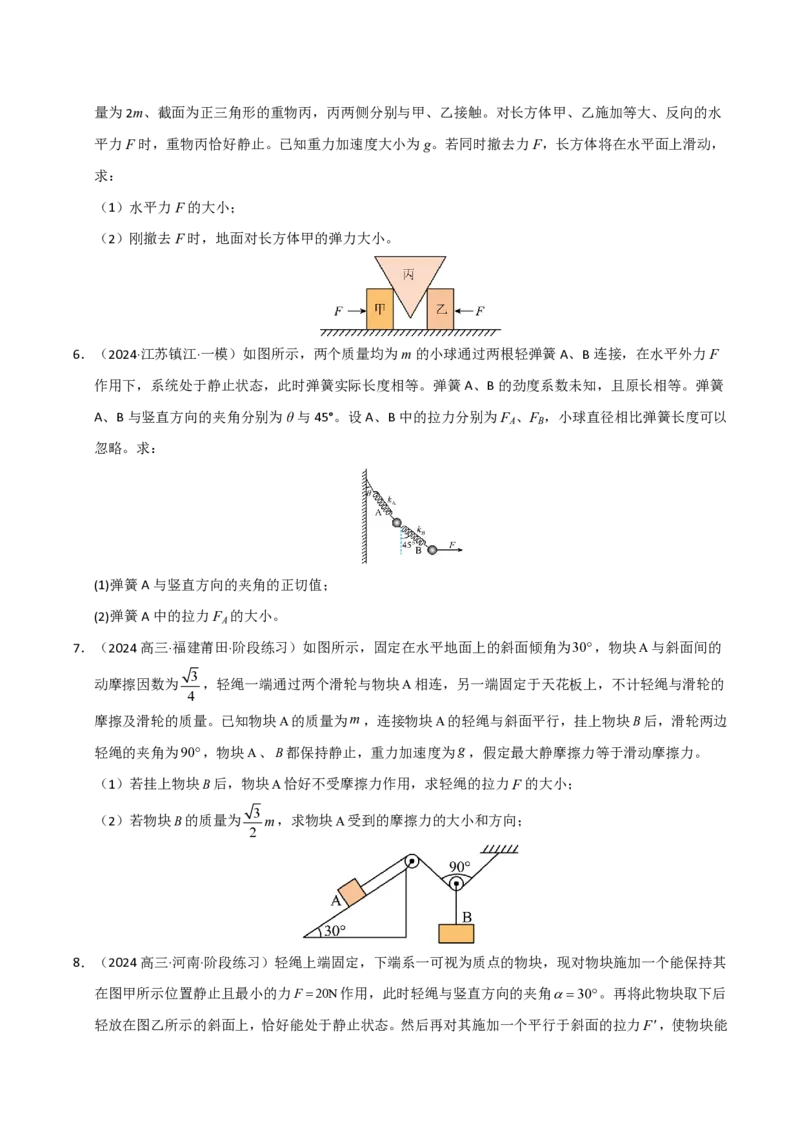
3.(2024·辽宁丹东·二模)小明学习了共点力及共点力作用下物体平衡的条件后,对生活中的一些平衡现
象产生了浓厚的兴趣,进行了一些研究并获取相关数据,请你协助小明完成以下两个任务:
(1)竖直墙上用一根细绳(轻质)悬挂了一幅相框(如图),经测量:两挂钉之间的细绳长度为
70cm,两个挂钉间距离为42cm,相框的重10N,计算出细绳上的张力大小为多少;
(2)长度为2R的筷子AB放入半径为R的半球形空汤碗中恰处于静止状态,测得筷子在碗内的长度为
1.6R,计算出这根筷子的重心到A端的距离(筷子与汤碗之间的摩擦不计)。
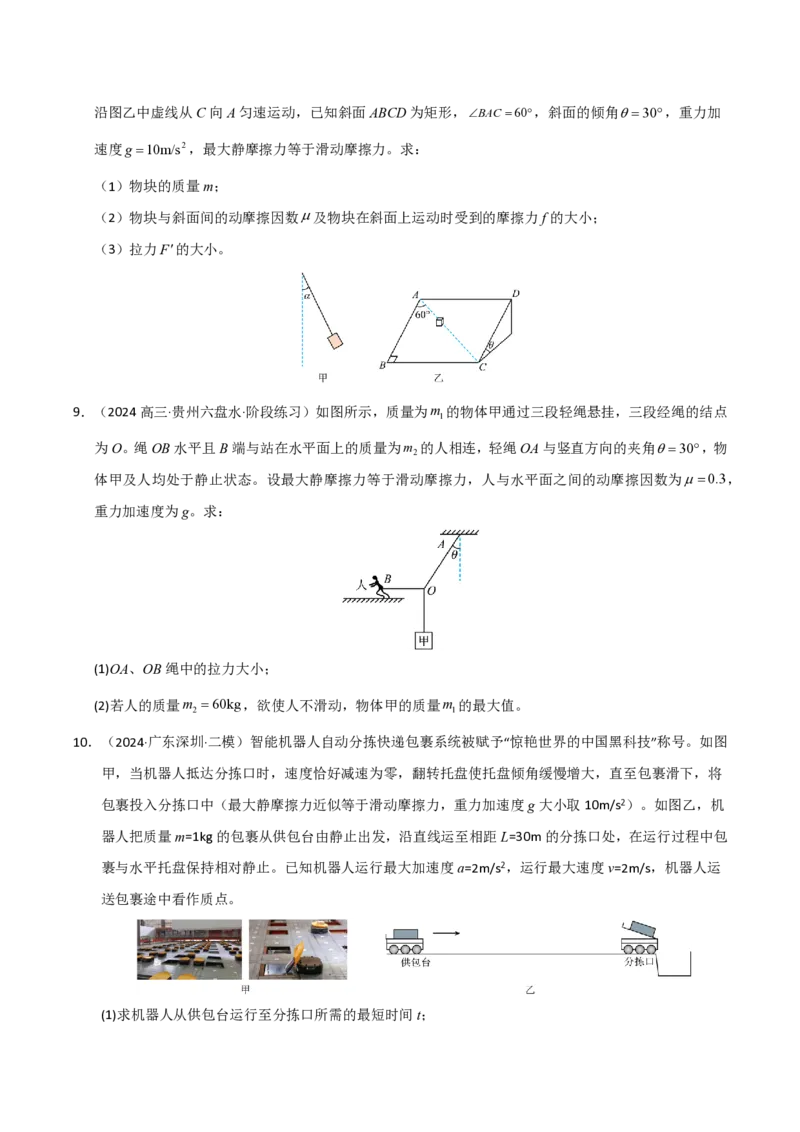
4.(2024·四川成都·模拟预测)在水平道路上行驶的汽车,挡风玻璃与水平面成37,无风的天气里,
车辆行驶时,静止在挡风玻璃上的树叶受到水平方向的空气推力,推力方向与车前进方向相反,大小由
车速v决定,且满足F kv2。只讨论树叶沿挡风玻璃向下或向上的运动,横向运动可视为静止,已知树
叶的质量m0.01kg,k 0.75103kg/m,g取10m/s2,cos370.8,sin370.6。
(1)若忽略树叶与挡风玻璃间的摩擦力,求树叶静止在挡风玻璃上时车匀速运动的速度大小v ;
0
(2)若树叶与挡风玻璃间有摩擦,且最大静摩擦力等于滑动摩擦力,某次经精密测量发现当匀速运动
2 3
的车速为 v 时,原来静止在挡风玻璃上的树叶恰好要开始沿挡风玻璃向上运动,求树叶与挡风玻璃
3 0
间的动摩擦因数μ。
5.(2024·安徽·一模)如图,质量均为m的光滑长方体甲、乙静置在光滑的水平面上。在它们之间放一质量为2m、截面为正三角形的重物丙,丙两侧分别与甲、乙接触。对长方体甲、乙施加等大、反向的水
平力F时,重物丙恰好静止。已知重力加速度大小为g。若同时撤去力F,长方体将在水平面上滑动,
求:
(1)水平力F的大小;
(2)刚撤去F时,地面对长方体甲的弹力大小。
6.(2024·江苏镇江·一模)如图所示,两个质量均为m的小球通过两根轻弹簧A、B连接,在水平外力F
作用下,系统处于静止状态,此时弹簧实际长度相等。弹簧A、B的劲度系数未知,且原长相等。弹簧
A、B与竖直方向的夹角分别为θ与45°。设A、B中的拉力分别为F 、F ,小球直径相比弹簧长度可以
A B
忽略。求:
(1)弹簧A与竖直方向的夹角的正切值;
(2)弹簧A中的拉力F 的大小。
A
7.(2024高三·福建莆田·阶段练习)如图所示,固定在水平地面上的斜面倾角为30,物块A与斜面间的
3
动摩擦因数为 ,轻绳一端通过两个滑轮与物块A相连,另一端固定于天花板上,不计轻绳与滑轮的
4
摩擦及滑轮的质量。已知物块A的质量为m,连接物块A的轻绳与斜面平行,挂上物块B后,滑轮两边
轻绳的夹角为90,物块A、B都保持静止,重力加速度为g,假定最大静摩擦力等于滑动摩擦力。
(1)若挂上物块B后,物块A恰好不受摩擦力作用,求轻绳的拉力F 的大小;
3
(2)若物块B的质量为 m,求物块A受到的摩擦力的大小和方向;
2
8.(2024高三·河南·阶段练习)轻绳上端固定,下端系一可视为质点的物块,现对物块施加一个能保持其
在图甲所示位置静止且最小的力F20N作用,此时轻绳与竖直方向的夹角30。再将此物块取下后
轻放在图乙所示的斜面上,恰好能处于静止状态。然后再对其施加一个平行于斜面的拉力F,使物块能沿图乙中虚线从C向A匀速运动,已知斜面ABCD为矩形,BAC60,斜面的倾角30,重力加
速度g 10m/s2,最大静摩擦力等于滑动摩擦力。求:
(1)物块的质量m;
(2)物块与斜面间的动摩擦因数及物块在斜面上运动时受到的摩擦力f的大小;
(3)拉力F的大小。
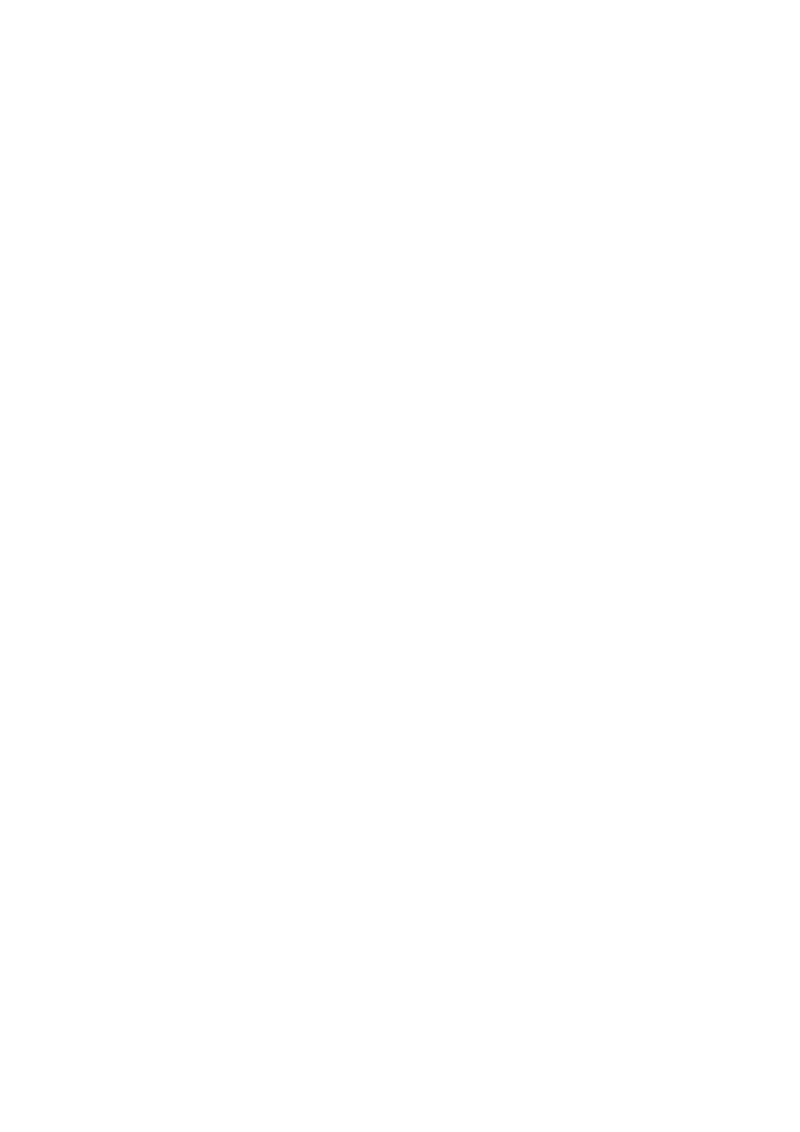
9.(2024高三·贵州六盘水·阶段练习)如图所示,质量为m 的物体甲通过三段轻绳悬挂,三段经绳的结点
1
为O。绳OB水平且B端与站在水平面上的质量为m 的人相连,轻绳OA与竖直方向的夹角30,物
2
体甲及人均处于静止状态。设最大静摩擦力等于滑动摩擦力,人与水平面之间的动摩擦因数为0.3,
重力加速度为g。求:
(1)OA、OB绳中的拉力大小;
(2)若人的质量m 60kg,欲使人不滑动,物体甲的质量m 的最大值。
2 1
10.(2024·广东深圳·二模)智能机器人自动分拣快递包裹系统被赋予“惊艳世界的中国黑科技”称号。如图
甲,当机器人抵达分拣口时,速度恰好减速为零,翻转托盘使托盘倾角缓慢增大,直至包裹滑下,将
包裹投入分拣口中(最大静摩擦力近似等于滑动摩擦力,重力加速度g大小取10m/s2)。如图乙,机
器人把质量m=1kg的包裹从供包台由静止出发,沿直线运至相距L=30m的分拣口处,在运行过程中包
裹与水平托盘保持相对静止。已知机器人运行最大加速度a=2m/s2,运行最大速度v=2m/s,机器人运
送包裹途中看作质点。
(1)求机器人从供包台运行至分拣口所需的最短时间t;3
(2)若包裹与水平托盘的动摩擦因数为 ,则在机器人A到达投递口处,要使得包裹能够下滑,托盘的
3
最小倾角θm应该是多少;
11.(2024高三·广东·阶段练习)如图所示,倾角α = 30°的足够长传送带上有一长L = 1.0m,质量M = 0.5kg
的薄木板,木板的最右端叠放质量为m = 0.3kg的小木块。对木板施加一沿传送带向上的恒力F,同时
3
让传送带逆时针转动,运行速度v = 1.0m/s。已知木板与物块间动摩擦因数 ,木板与传送带间
1 2
3
的动摩擦因数 ,取g = 10m/s2,最大静摩擦力等于滑动摩擦力。
2 4
(1)若在恒力F作用下,薄木板保持静止不动,通过计算判定小木块所处的状态;
(2)若小木块和薄木板相对静止,一起沿传送带向上滑动,求所施恒力的最大值F ;
m
(3)若F = 10N,木板与物块经过多长时间分离?分离前的这段时间内,木板相对传送带的位移是多
少。
