文档内容
押广东卷计算题 2
力学
力学计算题是高考的必考内容,高考对于这部分知识点的命题形式是以生活中的情景为背景,强调情
景与对应的力学知识的有机融合,突出了应用性,巩固了基础性。考查学生的推理能力、综合分析能力和
应用数学知识解决物理问题的能力。
命题的思路:以一定的情景为基础,该情景包含多个物理过程,每一个过程可对应不同的物理模型,
不同物理过程通过一个衔接点联系起来(找准衔接点往往是解题的突破口)。
力学计算题涉及的知识点主要有:
常考考点 真题举例
α衰变的特点及其方程的写法 三种射线的性质 2023·广东·高考真题
基态、激发态、跃迁和电离 2022·广东·高考真题
半衰期的相关计算 2021·广东·高考真题考点 1:运动学
1、直线运动
匀 基本公式法 v=v +at,x=vt+ 三个公式中的物理量x、a、v 、v均为矢量(三个公式称
0 0 0
变 at2,v2-v=2ax。 为矢量式)。在应用时,一般以初速度方向为正方向,凡
速 是与v 方向相同的x、a、v均为正值,反之为负值。
0
直
线
比例法 只适用于初速度为零 1T末、2T末、3T末……瞬时速度的比为:v
1
∶v
2
∶v
3
∶…∶v
n
=
运 的匀变速直线运动。 1∶2∶3∶…∶n;1T 内、2T 内、3T 内……位移的比为:
动 x∶x∶x∶…∶x=12∶22∶32∶…∶n2;第一个T内、第二个T内、第
1 2 3
三个T内……位移的比为:x ∶x ∶x ∶…∶x =1∶3∶5∶…∶(2n-
Ⅰ Ⅱ Ⅲ n
1);从静止开始通过连续相等的位移所用时间的比为:
t∶t∶t∶…∶t=1∶(-1)∶(-)∶…∶(-)。
1 2 3 n
图像法 x−t图像,v−t图像,a x−t图像纵轴表示位移; v−t图像纵轴表示速度。x−t图像
-t图像,a-x图像, 上斜率表示速度; v−t图像上斜率表示加速度。v−t图像
-t图像,v2-x图像 上图线和时间轴围成的“面积”表示位移。a-t图像所围
面积表示速度变化量Δv。a-x图像所围面积表示。-t图
像的斜率为a。v2-x图像斜率为2a。
推论法 v = 物体在一段时间内的平均速度等于这段时间中间时刻的瞬
t
时速度,还等于初、末时刻速度矢量和的一半;任意两个
= 2 =,Δx=x -
2 连续相等的时间间隔T内的位移之差为一恒量。
x =x -x =…=x -x
1 3 2 n n
=aT2。
-1
逆向思维法 匀减速到速度为零的 刹车类问题和双向可逆类问题。
直线运动一般看成逆
向的初速度为零的匀
加速直线运动。
平均速度法 v 任一时间t中间时刻的瞬时速度等于这段时间t内的平均
t
速度。
= 2
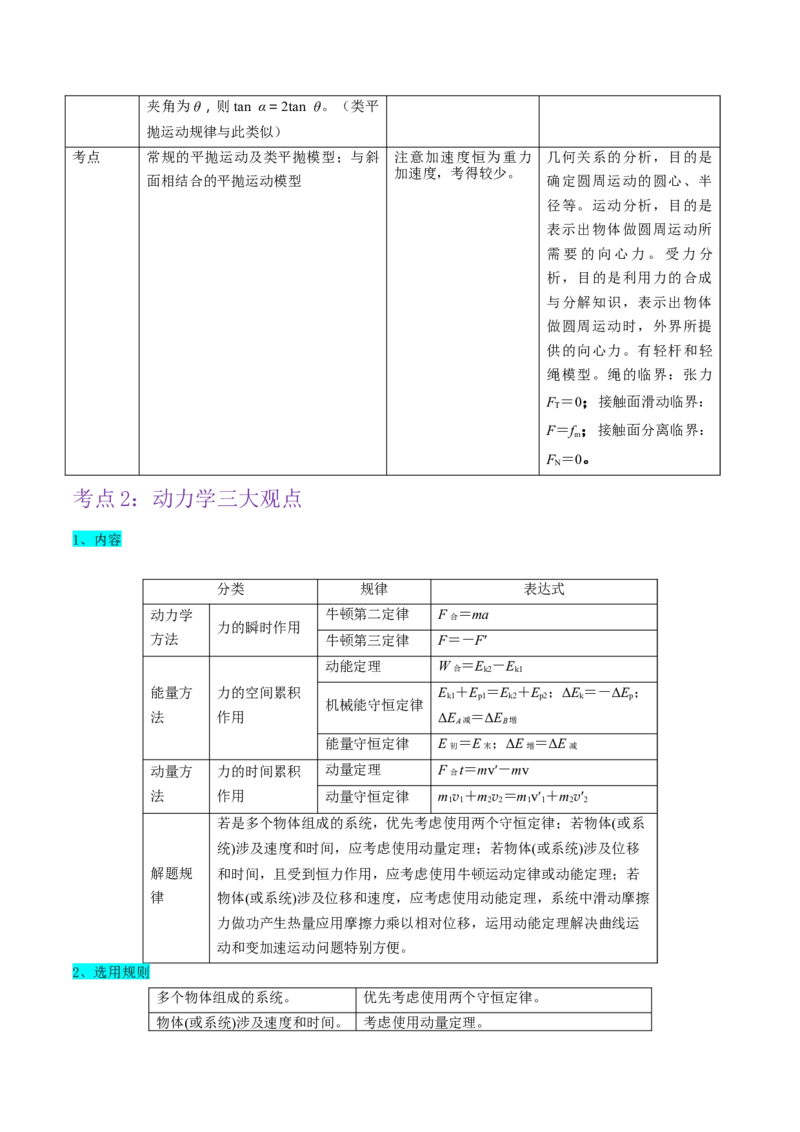
2、曲线运动
类型 平抛运动(类平抛运动) 斜抛运动 圆周运动
图例
运动规律 水平方向:做匀速直线运动,速度: 速度公式:v =v = 有F=m=mω2r=m=mωv
x 0x
v x =v 0 ,位移:x=v 0 t;竖直方向:做 v 0 cos θ;v y =v 0y -gt= =4π2mf2r
自由落体运动,速度:v y =gt,位 v 0 sin θ-gt。位移公 当 F=mrω2时,物体做匀
速圆周运动;当 F<mrω2
移:y=gt2;合速度:v==,方向与 式:x=vcos θ·t 时,物体逐渐远离圆心,F
0
为实际提供的向心力;当
水平方向夹角为θ,则tan θ==。做 y=v
0
sin θ·t-gt2。当
F>mrω2时,物体逐渐向圆
平抛(或类平抛)运动的物体任一时刻 心靠近,做向心运动。
v =0 时,v=v =
y 0x
的瞬时速度的反向延长线一定通过此
vcos θ,物体到达最
0
时水平位移的中点。速度方向与水平
高点h ==。
max
方向的夹角为α,位移与水平方向的夹角为θ,则tan α=2tan θ。(类平
抛运动规律与此类似)
考点 常规的平抛运动及类平抛模型;与斜 注意加速度恒为重力 几何关系的分析,目的是
加速度,考得较少。
面相结合的平抛运动模型 确定圆周运动的圆心、半
径等。运动分析,目的是
表示出物体做圆周运动所
需要的向心力。受力分
析,目的是利用力的合成
与分解知识,表示出物体
做圆周运动时,外界所提
供的向心力。有轻杆和轻
绳模型。绳的临界:张力
F =0;接触面滑动临界:
T
F=f ;接触面分离临界:
m
F =0。
N
考点 2:动力学三大观点
1、内容
分类 规律 表达式
动力学 牛顿第二定律 F =ma
合
力的瞬时作用
方法 牛顿第三定律 F=-F′
动能定理 W =E -E
合 k2 k1
能量方 力的空间累积 E +E =E +E ;ΔE=-ΔE;
k1 p1 k2 p2 k p
机械能守恒定律
法 作用 ΔE =ΔE
A减 B增
能量守恒定律 E =E ;ΔE =ΔE
初 末 增 减
动量方 力的时间累积 动量定理 F 合 t=mv′-mv
法 作用 动量守恒定律 mv+mv=mv′+mv′
1 1 2 2 1 1 2 2
若是多个物体组成的系统,优先考虑使用两个守恒定律;若物体(或系
统)涉及速度和时间,应考虑使用动量定理;若物体(或系统)涉及位移
解题规 和时间,且受到恒力作用,应考虑使用牛顿运动定律或动能定理;若
律 物体(或系统)涉及位移和速度,应考虑使用动能定理,系统中滑动摩擦
力做功产生热量应用摩擦力乘以相对位移,运用动能定理解决曲线运
动和变加速运动问题特别方便。
2、选用规则
多个物体组成的系统。 优先考虑使用两个守恒定律。
物体(或系统)涉及速度和时间。 考虑使用动量定理。物体(或系统)涉及位移和时间, 考虑使用牛顿运动定律或动能定理。
且受到恒力作用。
物体(或系统)涉及位移和速度。 考虑使用动能定理,系统中滑动摩擦力做功
产生热量应用摩擦力乘以相对位移,运用动
能定理解决曲线运动和变加速运动问题特别
方便。
3、根据物理量进行选取的思路
涉及加速度的问题 一般要用牛顿运动定律。
涉及运动时间或作 一般优先考虑用功能关系,其次再考虑用牛顿运动定律。
用时间的问题
涉及初、末速度问 一般优先考虑用功能关系,其次考虑用动量观点,最后再
题 考虑用牛顿运动定律。
涉及运动的位移或 一般优先考虑用功能关系,其次再考虑用牛顿运动定律。
路程的问题
4、根据研究过程进行选取的思路
涉及瞬间状态的分析和运动性质的分析 必须要用动力学观点
涉及复杂的直线或曲线运动问题 要用能量观点或动量观点
涉及短暂的相互作用问题 优先考虑用动量定理
涉及碰撞、爆炸、反冲等问题 用动量守恒定律
5、动能定理中总功的求法
总功的求法:①先由力的合成与分解法或根据牛顿第二定律求出合力 F ,然后由W=F lcosα计算;
合 合
②计算各个力对物体做的功W、W、…、W,然后将各个外力所做的功相加即为总功。
1 2 n
合外力做的功中的位移和速度必须是相对于同一个参考系的,一般以地面(相对地面静止的物体)为
参考系。列动能定理方程时,必须明确各力做功的正、负,确实难以判断的先假定为正功,最后根据结果
加以确定。
6、机械能守恒判断方法
利用定义进行判断 分析动能和势能的和是否发生变化。
利用做功进行判断 系统内只有重力和弹簧弹力做功,其他力均不做功,或有其他力做
功,但其他力做功的代数和为零,则机械能守恒。
利用能量转化进行判断 若系统内物体间只有动能和重力势能及弹性势能的相互转化,没有
其他形式的能(如没有内能增加)的转化,则系统的机械能守恒。
7、机械能守恒定律解题方法
①明确研究对象;②分析研究对象的受力情况和运动情况,分析清楚各力做功的情况;③选取适当的
势能平面,明确研究对象的初末状态的机械能;④选取合适的机械能守恒定律的观点列表达式;⑤对结果
进行讨论和说明。
机械能守恒定律是一种“能——能转化”关系,应用时首先要判断所研究的物理情景中机械能是否守
恒。如果系统(除地球外)只有一个物体,用守恒的观点求解比较方便;对于由两个或两个以上物体组成的系统,用转化或转移的观点求解比较方便。
8、机械能守恒定律的应用
应用类型 分析方法
单个物体的机械能守恒问题 明确研究对象;分析研究对象的受力情况和运动情
况,分析清楚各力做功的情况;选取合适的机械能
守恒定律的观点列表达式;对结果进行讨论和说
明。
多个物体的机械能守恒问题 分析多个物体组成的系统所受的外力是否只有重力
或弹力做功,内力是否造成了机械能与其他形式能
的转化,从而判断系统机械能是否守恒。对多个物
体组成的系统,一般用“转化法”和“转移法”来
判断其机械能是否守恒。注意寻找用绳或杆相连接
的物体间的速度关系和位移关系。
含弹簧的机械能守恒问题 弹簧的形变会具有弹性势能,系统的总动能将发生
变化,若系统所受的外力和除弹簧弹力以外的内力
不做功,系统机械能守恒。弹簧两端物体把弹簧拉
伸至最长(或压缩至最短)时,两端的物体具有相
同的速度,弹性势能最大。
非质点的机械能守恒问题 像“链条”“液柱”类的物体,其在运动过程中将
发生形变,其重心位置相对物体也发生变化,因此
这类物体不能再看成质点来处理,虽然不能看成质
点来处理,但因只有重力做功,物体整体机械能守
恒。一般情况下,可将物体分段处理,确定质量分
布均匀的规则并确定物体各部分的重心位置,然后
根据初末状态物体重力势能的变化列式进行求解。
9、动量定理的应用
解释现象 物体的动量变化一定,当力的作用时间越短时,力就越大;当
力的作用时间越长时,力就越小;
作用力一定,力的作用时间越长,动量变化量越大;力的作用
时间越短,动量量变化越小。
求变力的冲量 用I=Δp求变力的冲量。
求动量的变化量 用Δp=F·Δt求恒力作用下的曲线运动中物体动量的变化量。
10、动量守恒定律
mv+mv=mv′+mv′ 选定正方向,将式中各矢量转化为代数量,用正、负符号表示各
1 1 2 2 1 1 2 2
自的方向,式中的速度均为瞬时速度,均以地球为参考系。
p=p′ 系统相互作用前的总动量p和相互作用后的总动量p′大小相等、
方向相同。系统总动量的求法遵循平行四边形法则。
Δp=p′-p=0 系统总动量的增量为零。
Δp=-Δp 相互作用的系统内中的一部分动量的增加量等于另一部分动量的
1 2
减少量。
守恒的条件如下:
理想条件 系统不受外力作用时,系统动量守恒。系统不受外力的
条件可放宽至系统所受外力之和为零。
近似条件 系统所受合外力不为零时,但系统的内力远大于外力,系统的动量可看成近似守恒。比如碰撞、爆炸等现象。
单方向的动量守 系统在某一方向上符合以上两条中的某一条,则系统在
恒条件 该方向上动量守恒。
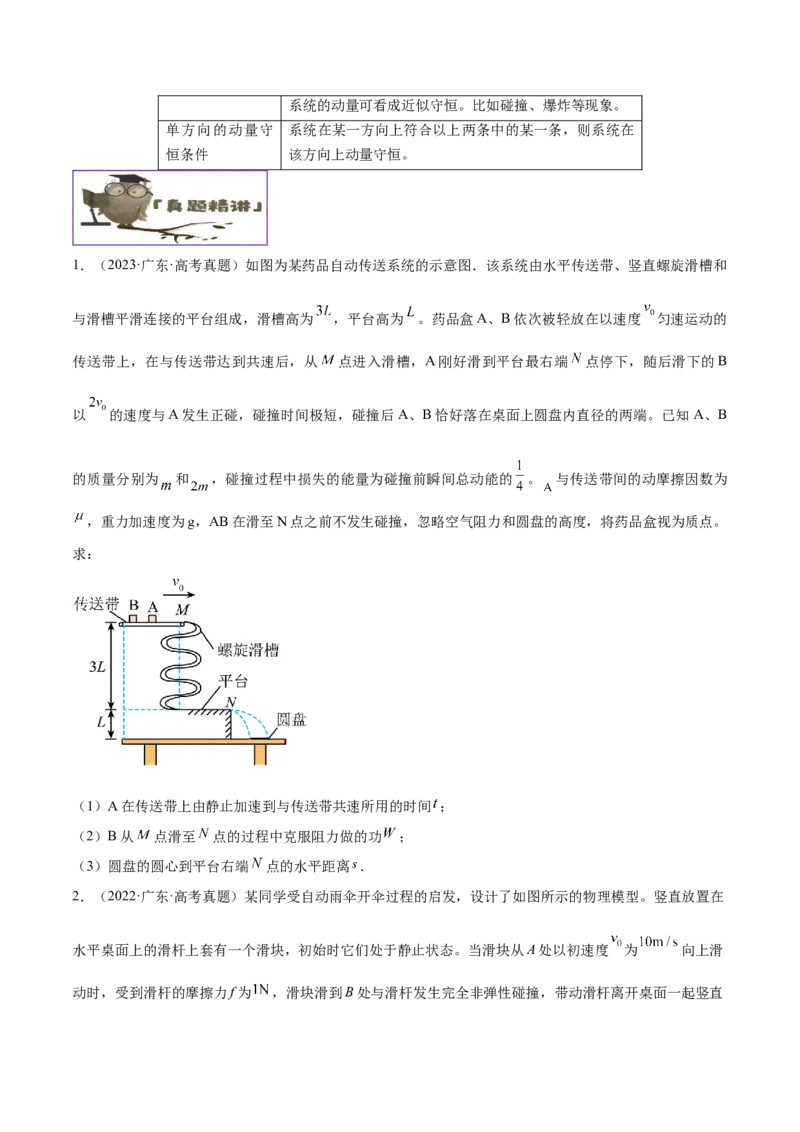
1.(2023·广东·高考真题)如图为某药品自动传送系统的示意图.该系统由水平传送带、竖直螺旋滑槽和
与滑槽平滑连接的平台组成,滑槽高为 ,平台高为 。药品盒A、B依次被轻放在以速度 匀速运动的
传送带上,在与传送带达到共速后,从 点进入滑槽,A刚好滑到平台最右端 点停下,随后滑下的B
以 的速度与A发生正碰,碰撞时间极短,碰撞后A、B恰好落在桌面上圆盘内直径的两端。已知A、B
的质量分别为 和 ,碰撞过程中损失的能量为碰撞前瞬间总动能的 。 与传送带间的动摩擦因数为
,重力加速度为g,AB在滑至N点之前不发生碰撞,忽略空气阻力和圆盘的高度,将药品盒视为质点。
求:
(1)A在传送带上由静止加速到与传送带共速所用的时间 ;
(2)B从 点滑至 点的过程中克服阻力做的功 ;
(3)圆盘的圆心到平台右端 点的水平距离 .
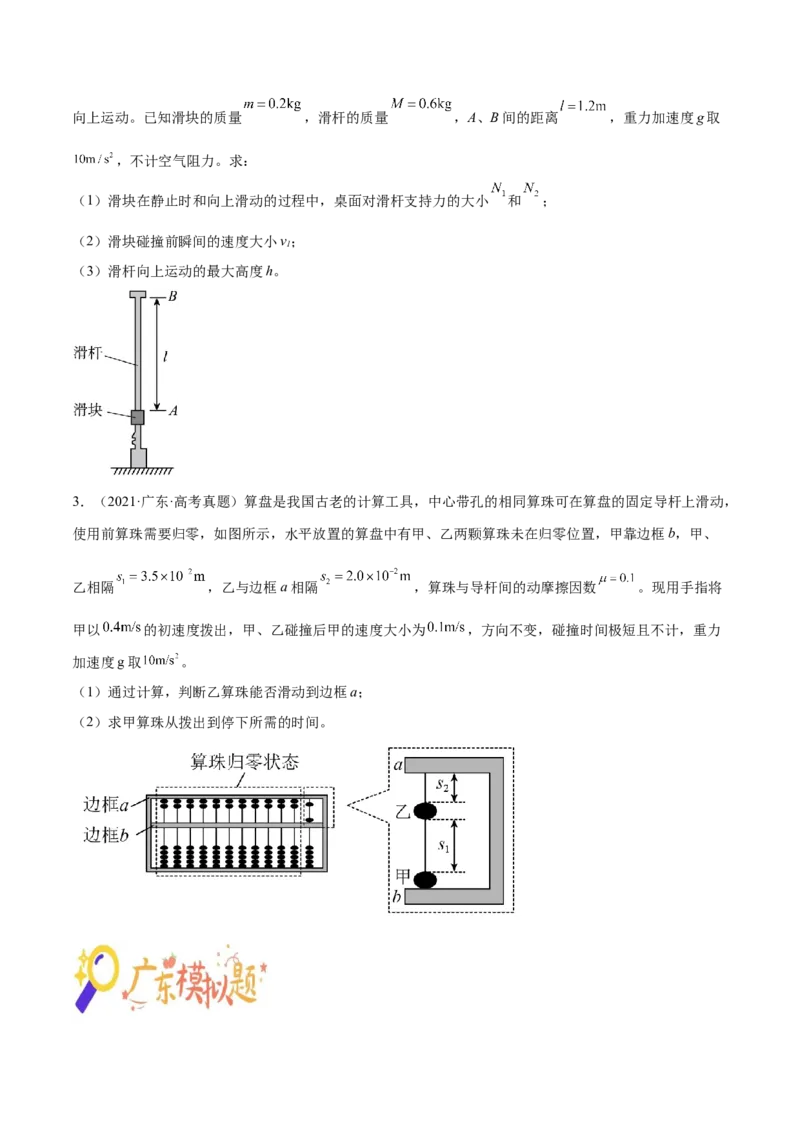
2.(2022·广东·高考真题)某同学受自动雨伞开伞过程的启发,设计了如图所示的物理模型。竖直放置在
水平桌面上的滑杆上套有一个滑块,初始时它们处于静止状态。当滑块从A处以初速度 为 向上滑
动时,受到滑杆的摩擦力f为 ,滑块滑到B处与滑杆发生完全非弹性碰撞,带动滑杆离开桌面一起竖直向上运动。已知滑块的质量 ,滑杆的质量 ,A、B间的距离 ,重力加速度g取
,不计空气阻力。求:
(1)滑块在静止时和向上滑动的过程中,桌面对滑杆支持力的大小 和 ;
(2)滑块碰撞前瞬间的速度大小v;
1
(3)滑杆向上运动的最大高度h。
3.(2021·广东·高考真题)算盘是我国古老的计算工具,中心带孔的相同算珠可在算盘的固定导杆上滑动,
使用前算珠需要归零,如图所示,水平放置的算盘中有甲、乙两颗算珠未在归零位置,甲靠边框b,甲、
乙相隔 ,乙与边框a相隔 ,算珠与导杆间的动摩擦因数 。现用手指将
甲以 的初速度拨出,甲、乙碰撞后甲的速度大小为 ,方向不变,碰撞时间极短且不计,重力
加速度g取 。
(1)通过计算,判断乙算珠能否滑动到边框a;
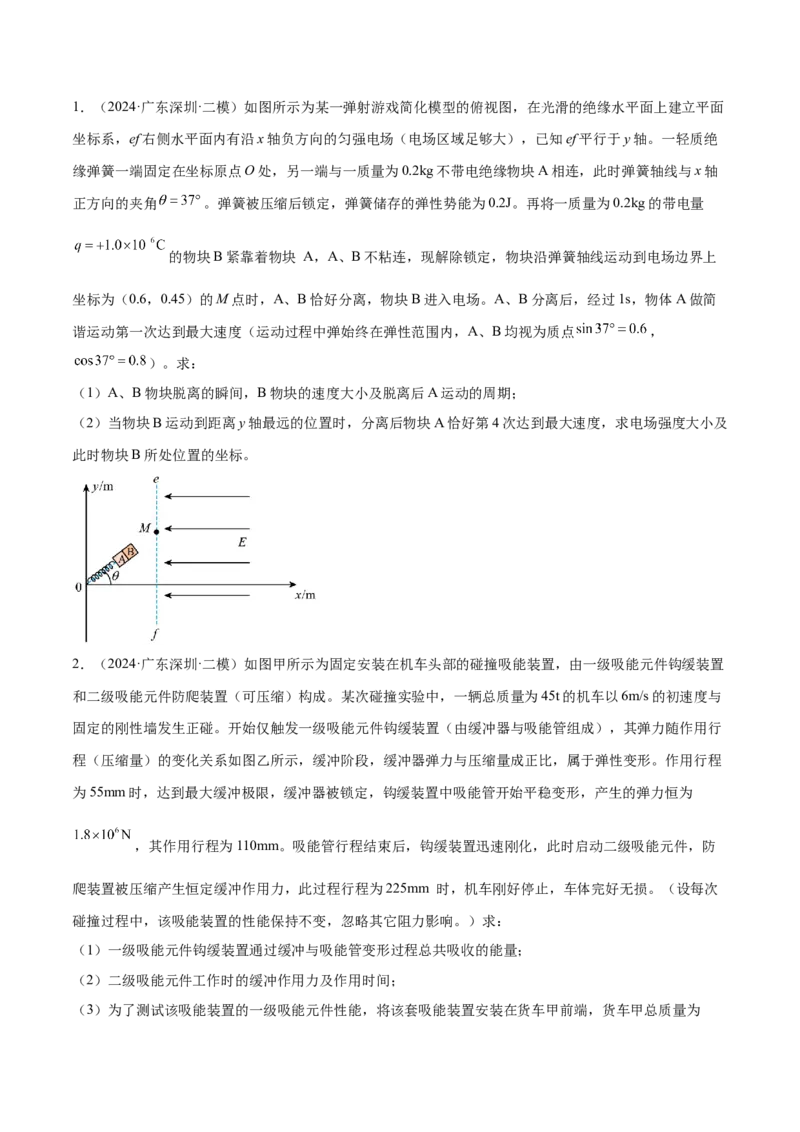
(2)求甲算珠从拨出到停下所需的时间。1.(2024·广东深圳·二模)如图所示为某一弹射游戏简化模型的俯视图,在光滑的绝缘水平面上建立平面
坐标系,ef右侧水平面内有沿x轴负方向的匀强电场(电场区域足够大),已知ef平行于y轴。一轻质绝
缘弹簧一端固定在坐标原点O处,另一端与一质量为0.2kg不带电绝缘物块A相连,此时弹簧轴线与x轴
正方向的夹角 。弹簧被压缩后锁定,弹簧储存的弹性势能为0.2J。再将一质量为0.2kg的带电量
的物块B紧靠着物块 A,A、B不粘连,现解除锁定,物块沿弹簧轴线运动到电场边界上
坐标为(0.6,0.45)的M点时,A、B恰好分离,物块B进入电场。A、B分离后,经过1s,物体A做简
谐运动第一次达到最大速度(运动过程中弹始终在弹性范围内,A、B均视为质点 ,
)。求:
(1)A、B物块脱离的瞬间,B物块的速度大小及脱离后A运动的周期;
(2)当物块B运动到距离y轴最远的位置时,分离后物块A恰好第4次达到最大速度,求电场强度大小及
此时物块B所处位置的坐标。
2.(2024·广东深圳·二模)如图甲所示为固定安装在机车头部的碰撞吸能装置,由一级吸能元件钩缓装置
和二级吸能元件防爬装置(可压缩)构成。某次碰撞实验中,一辆总质量为45t的机车以6m/s的初速度与
固定的刚性墙发生正碰。开始仅触发一级吸能元件钩缓装置(由缓冲器与吸能管组成),其弹力随作用行
程(压缩量)的变化关系如图乙所示,缓冲阶段,缓冲器弹力与压缩量成正比,属于弹性变形。作用行程
为55mm时,达到最大缓冲极限,缓冲器被锁定,钩缓装置中吸能管开始平稳变形,产生的弹力恒为
,其作用行程为110mm。吸能管行程结束后,钩缓装置迅速刚化,此时启动二级吸能元件,防
爬装置被压缩产生恒定缓冲作用力,此过程行程为225mm 时,机车刚好停止,车体完好无损。(设每次
碰撞过程中,该吸能装置的性能保持不变,忽略其它阻力影响。)求:
(1)一级吸能元件钩缓装置通过缓冲与吸能管变形过程总共吸收的能量;
(2)二级吸能元件工作时的缓冲作用力及作用时间;
(3)为了测试该吸能装置的一级吸能元件性能,将该套吸能装置安装在货车甲前端,货车甲总质量为66t,与静止在水平面上无制动的质量为13.2t的货车乙发生正碰(不考虑货车的形变),在一级吸能元件
最大吸能总量的60%以内进行碰撞测试(碰撞时若钩缓装置的吸能管未启动时,缓冲器能像弹簧一样工
作)。 求货车乙被碰后的速率范围。
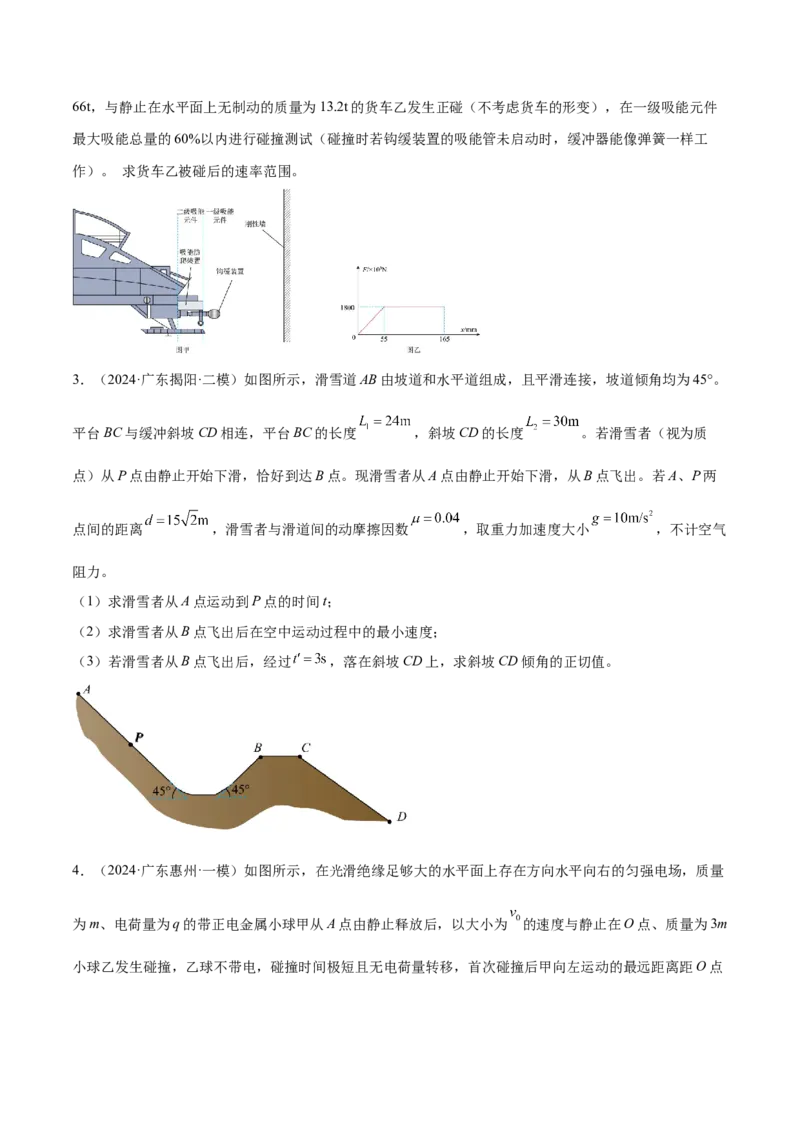
3.(2024·广东揭阳·二模)如图所示,滑雪道AB由坡道和水平道组成,且平滑连接,坡道倾角均为45°。
平台BC与缓冲斜坡CD相连,平台BC的长度 ,斜坡CD的长度 。若滑雪者(视为质
点)从P点由静止开始下滑,恰好到达B点。现滑雪者从A点由静止开始下滑,从B点飞出。若A、P两
点间的距离 ,滑雪者与滑道间的动摩擦因数 ,取重力加速度大小 ,不计空气
阻力。
(1)求滑雪者从A点运动到P点的时间t;
(2)求滑雪者从B点飞出后在空中运动过程中的最小速度;
(3)若滑雪者从B点飞出后,经过 ,落在斜坡CD上,求斜坡CD倾角的正切值。
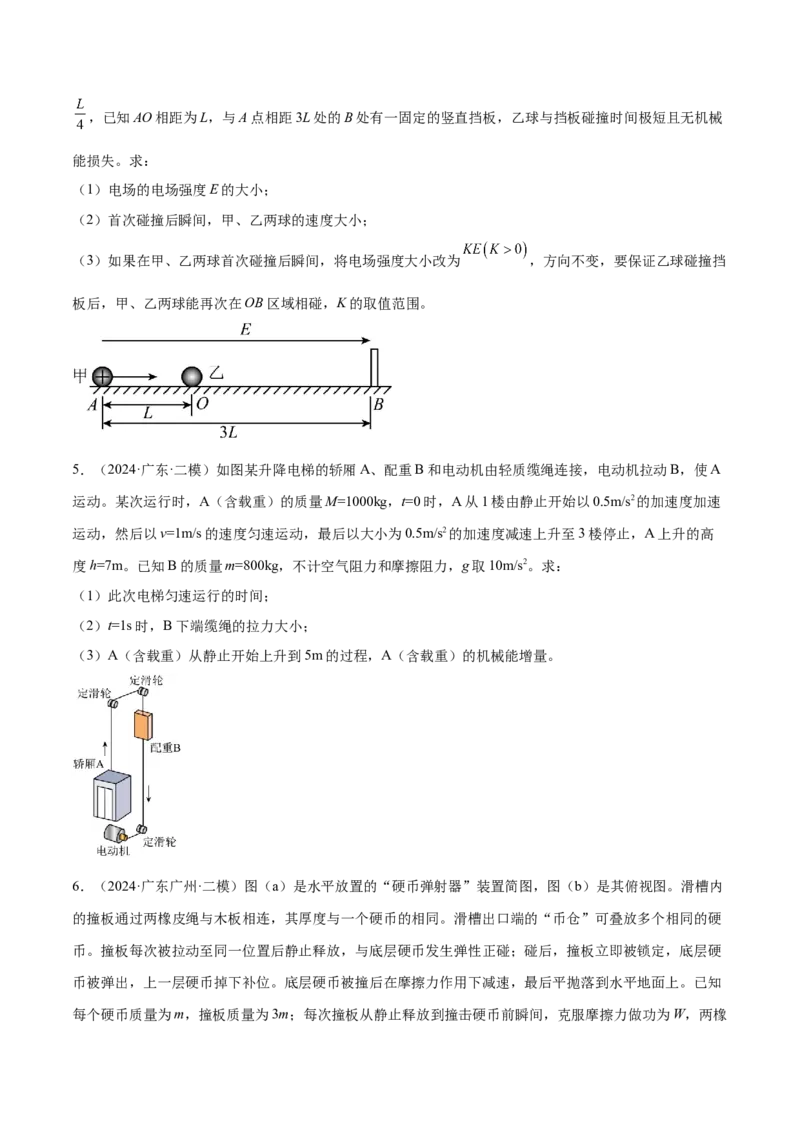
4.(2024·广东惠州·一模)如图所示,在光滑绝缘足够大的水平面上存在方向水平向右的匀强电场,质量
为m、电荷量为q的带正电金属小球甲从A点由静止释放后,以大小为 的速度与静止在O点、质量为3m
小球乙发生碰撞,乙球不带电,碰撞时间极短且无电荷量转移,首次碰撞后甲向左运动的最远距离距O点,已知AO相距为L,与A点相距3L处的B处有一固定的竖直挡板,乙球与挡板碰撞时间极短且无机械
能损失。求:
(1)电场的电场强度E的大小;
(2)首次碰撞后瞬间,甲、乙两球的速度大小;
(3)如果在甲、乙两球首次碰撞后瞬间,将电场强度大小改为 ,方向不变,要保证乙球碰撞挡
板后,甲、乙两球能再次在OB区域相碰,K的取值范围。
5.(2024·广东·二模)如图某升降电梯的轿厢A、配重B和电动机由轻质缆绳连接,电动机拉动B,使A
运动。某次运行时,A(含载重)的质量M=1000kg,t=0时,A从1楼由静止开始以0.5m/s2的加速度加速
运动,然后以v=1m/s的速度匀速运动,最后以大小为0.5m/s2的加速度减速上升至3楼停止,A上升的高
度h=7m。已知B的质量m=800kg,不计空气阻力和摩擦阻力,g取10m/s2。求:
(1)此次电梯匀速运行的时间;
(2)t=1s时,B下端缆绳的拉力大小;
(3)A(含载重)从静止开始上升到5m的过程,A(含载重)的机械能增量。
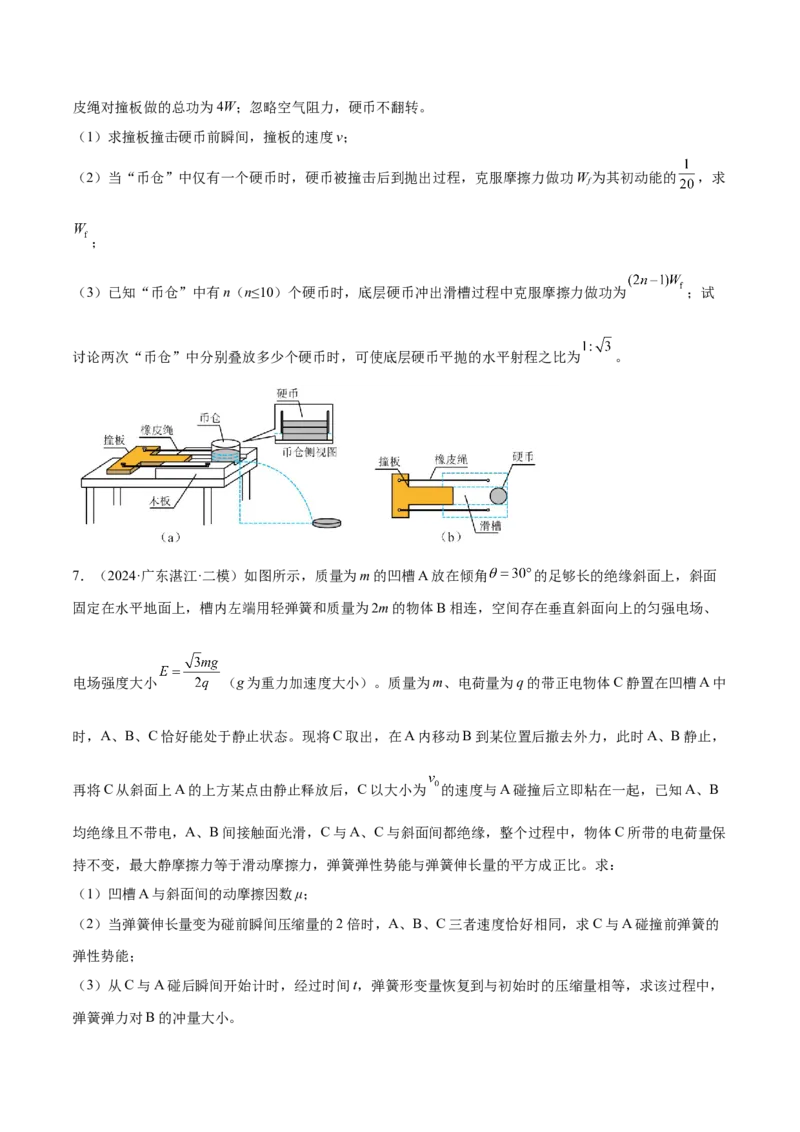
6.(2024·广东广州·二模)图(a)是水平放置的“硬币弹射器”装置简图,图(b)是其俯视图。滑槽内
的撞板通过两橡皮绳与木板相连,其厚度与一个硬币的相同。滑槽出口端的“币仓”可叠放多个相同的硬
币。撞板每次被拉动至同一位置后静止释放,与底层硬币发生弹性正碰;碰后,撞板立即被锁定,底层硬
币被弹出,上一层硬币掉下补位。底层硬币被撞后在摩擦力作用下减速,最后平抛落到水平地面上。已知
每个硬币质量为m,撞板质量为3m;每次撞板从静止释放到撞击硬币前瞬间,克服摩擦力做功为W,两橡皮绳对撞板做的总功为4W;忽略空气阻力,硬币不翻转。
(1)求撞板撞击硬币前瞬间,撞板的速度v;
(2)当“币仓”中仅有一个硬币时,硬币被撞击后到抛出过程,克服摩擦力做功W为其初动能的 ,求
f
;
(3)已知“币仓”中有n(n≤10)个硬币时,底层硬币冲出滑槽过程中克服摩擦力做功为 ;试
讨论两次“币仓”中分别叠放多少个硬币时,可使底层硬币平抛的水平射程之比为 。
7.(2024·广东湛江·二模)如图所示,质量为m的凹槽A放在倾角 的足够长的绝缘斜面上,斜面
固定在水平地面上,槽内左端用轻弹簧和质量为2m的物体B相连,空间存在垂直斜面向上的匀强电场、
电场强度大小 (g为重力加速度大小)。质量为m、电荷量为q的带正电物体C静置在凹槽A中
时,A、B、C恰好能处于静止状态。现将C取出,在A内移动B到某位置后撤去外力,此时A、B静止,
再将C从斜面上A的上方某点由静止释放后,C以大小为 的速度与A碰撞后立即粘在一起,已知A、B
均绝缘且不带电,A、B间接触面光滑,C与A、C与斜面间都绝缘,整个过程中,物体C所带的电荷量保
持不变,最大静摩擦力等于滑动摩擦力,弹簧弹性势能与弹簧伸长量的平方成正比。求:
(1)凹槽A与斜面间的动摩擦因数μ;
(2)当弹簧伸长量变为碰前瞬间压缩量的2倍时,A、B、C三者速度恰好相同,求C与A碰撞前弹簧的
弹性势能;
(3)从C与A碰后瞬间开始计时,经过时间t,弹簧形变量恢复到与初始时的压缩量相等,求该过程中,
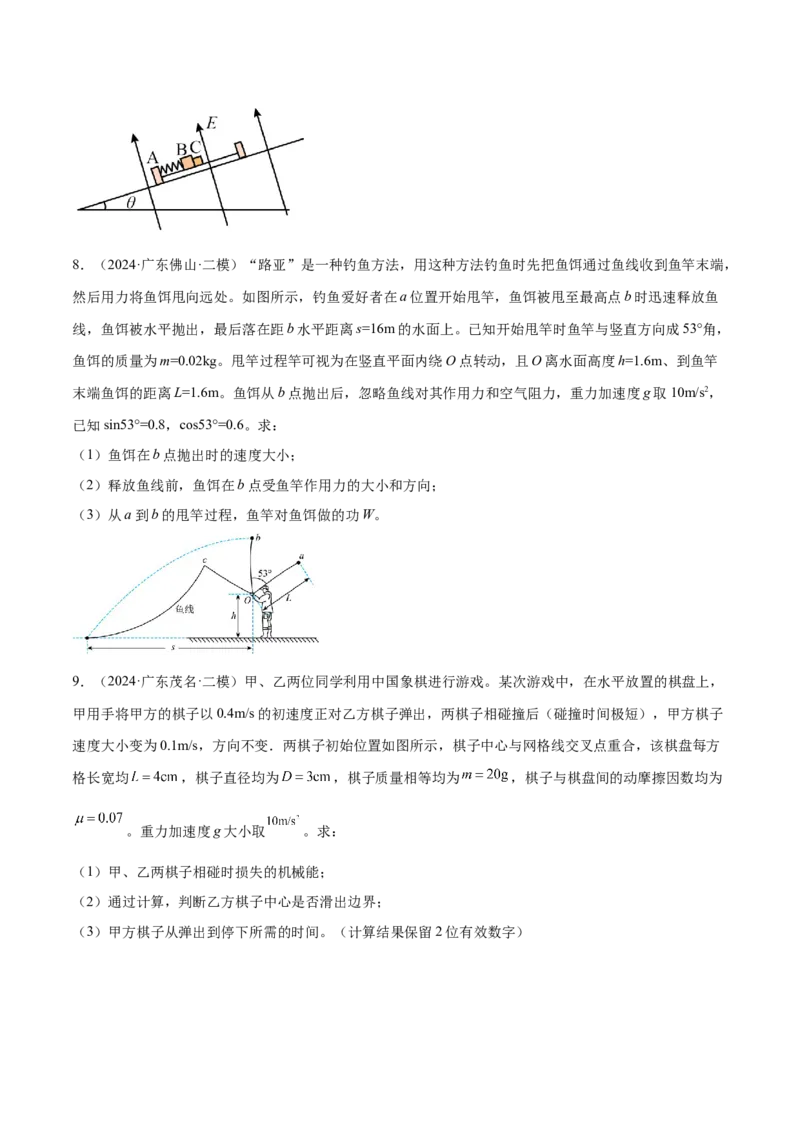
弹簧弹力对B的冲量大小。8.(2024·广东佛山·二模)“路亚”是一种钓鱼方法,用这种方法钓鱼时先把鱼饵通过鱼线收到鱼竿末端,
然后用力将鱼饵甩向远处。如图所示,钓鱼爱好者在a位置开始甩竿,鱼饵被甩至最高点b时迅速释放鱼
线,鱼饵被水平抛出,最后落在距b水平距离s=16m的水面上。已知开始甩竿时鱼竿与竖直方向成53°角,
鱼饵的质量为m=0.02kg。甩竿过程竿可视为在竖直平面内绕O点转动,且O离水面高度h=1.6m、到鱼竿
末端鱼饵的距离L=1.6m。鱼饵从b点抛出后,忽略鱼线对其作用力和空气阻力,重力加速度g取10m/s2,
已知sin53°=0.8,cos53°=0.6。求:
(1)鱼饵在b点抛出时的速度大小;
(2)释放鱼线前,鱼饵在b点受鱼竿作用力的大小和方向;
(3)从a到b的甩竿过程,鱼竿对鱼饵做的功W。
9.(2024·广东茂名·二模)甲、乙两位同学利用中国象棋进行游戏。某次游戏中,在水平放置的棋盘上,
甲用手将甲方的棋子以0.4m/s的初速度正对乙方棋子弹出,两棋子相碰撞后(碰撞时间极短),甲方棋子
速度大小变为0.1m/s,方向不变.两棋子初始位置如图所示,棋子中心与网格线交叉点重合,该棋盘每方
格长宽均 ,棋子直径均为 ,棋子质量相等均为 ,棋子与棋盘间的动摩擦因数均为
。重力加速度g大小取 。求:
(1)甲、乙两棋子相碰时损失的机械能;
(2)通过计算,判断乙方棋子中心是否滑出边界;
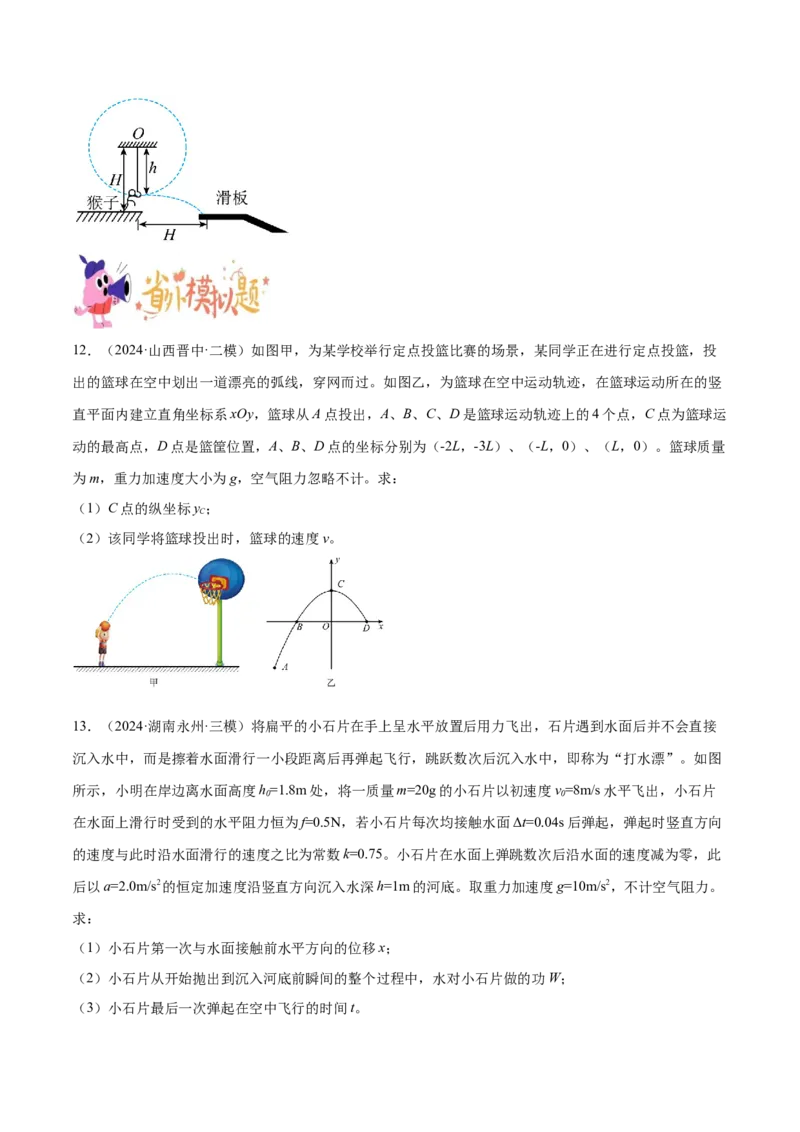
(3)甲方棋子从弹出到停下所需的时间。(计算结果保留2位有效数字)10.(2024·广东佛山·二模)如图,两工人在安装一园林石牌时,通过绳子对石牌同时施加大小相等、方
向与竖直方向成 的力T,使石牌恰好离开水平地面并保持静止,然后突然一起发力把石牌拉起准备安
装到预设位置,当石牌运动到离地面 处时,两条绳子同时断裂,石牌继续上升 后自由
下落,已知石牌质量 ,取重力加速度 , , 。忽略空气阻力,
求:
(1)T的大小;
(2)从绳断裂到石牌恰好接触地面的时间。
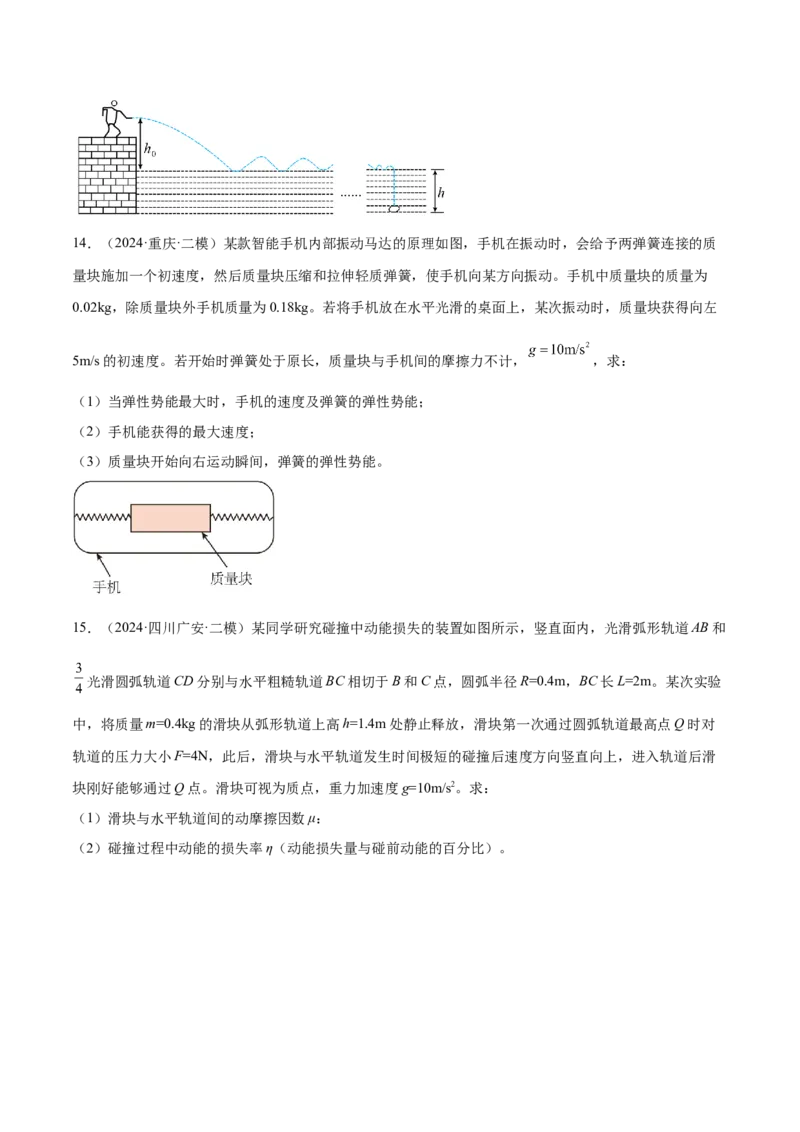
11.(2024·广东·模拟预测)游客在动物园里常看到猴子在荡秋千和滑滑板,其运动可以简化为如图所示
的模型,猴子需要借助悬挂在高处的秋千绳飞跃到对面的滑板上,质量为 的猴子在竖直平面内绕
圆心 做圆周运动。若猴子某次运动到 点的正下方时松手,猴子飞行水平距离 后跃到对面的滑
板上, 点离平台高度也为 ,猴子与 点之间的绳长 ,重力加速度大小 ,不考虑空气
阻力,秋千绳视为轻绳,猴子可视为质点,求:
(1)猴子落到滑板时的速度大小;
(2)猴子运动到 点的正下方时绳对猴子拉力的大小。12.(2024·山西晋中·二模)如图甲,为某学校举行定点投篮比赛的场景,某同学正在进行定点投篮,投
出的篮球在空中划出一道漂亮的弧线,穿网而过。如图乙,为篮球在空中运动轨迹,在篮球运动所在的竖
直平面内建立直角坐标系xOy,篮球从A点投出,A、B、C、D是篮球运动轨迹上的4个点,C点为篮球运
动的最高点,D点是篮筐位置,A、B、D点的坐标分别为(-2L,-3L)、(-L,0)、(L,0)。篮球质量
为m,重力加速度大小为g,空气阻力忽略不计。求:
(1)C点的纵坐标y ;
C
(2)该同学将篮球投出时,篮球的速度v。
13.(2024·湖南永州·三模)将扁平的小石片在手上呈水平放置后用力飞出,石片遇到水面后并不会直接
沉入水中,而是擦着水面滑行一小段距离后再弹起飞行,跳跃数次后沉入水中,即称为“打水漂”。如图
所示,小明在岸边离水面高度h=1.8m处,将一质量m=20g的小石片以初速度v=8m/s水平飞出,小石片
0 0
在水面上滑行时受到的水平阻力恒为f=0.5N,若小石片每次均接触水面Δt=0.04s后弹起,弹起时竖直方向
的速度与此时沿水面滑行的速度之比为常数k=0.75。小石片在水面上弹跳数次后沿水面的速度减为零,此
后以a=2.0m/s2的恒定加速度沿竖直方向沉入水深h=1m的河底。取重力加速度g=10m/s2,不计空气阻力。
求:
(1)小石片第一次与水面接触前水平方向的位移x;
(2)小石片从开始抛出到沉入河底前瞬间的整个过程中,水对小石片做的功W;
(3)小石片最后一次弹起在空中飞行的时间t。14.(2024·重庆·二模)某款智能手机内部振动马达的原理如图,手机在振动时,会给予两弹簧连接的质
量块施加一个初速度,然后质量块压缩和拉伸轻质弹簧,使手机向某方向振动。手机中质量块的质量为
0.02kg,除质量块外手机质量为0.18kg。若将手机放在水平光滑的桌面上,某次振动时,质量块获得向左
5m/s的初速度。若开始时弹簧处于原长,质量块与手机间的摩擦力不计, ,求:
(1)当弹性势能最大时,手机的速度及弹簧的弹性势能;
(2)手机能获得的最大速度;
(3)质量块开始向右运动瞬间,弹簧的弹性势能。
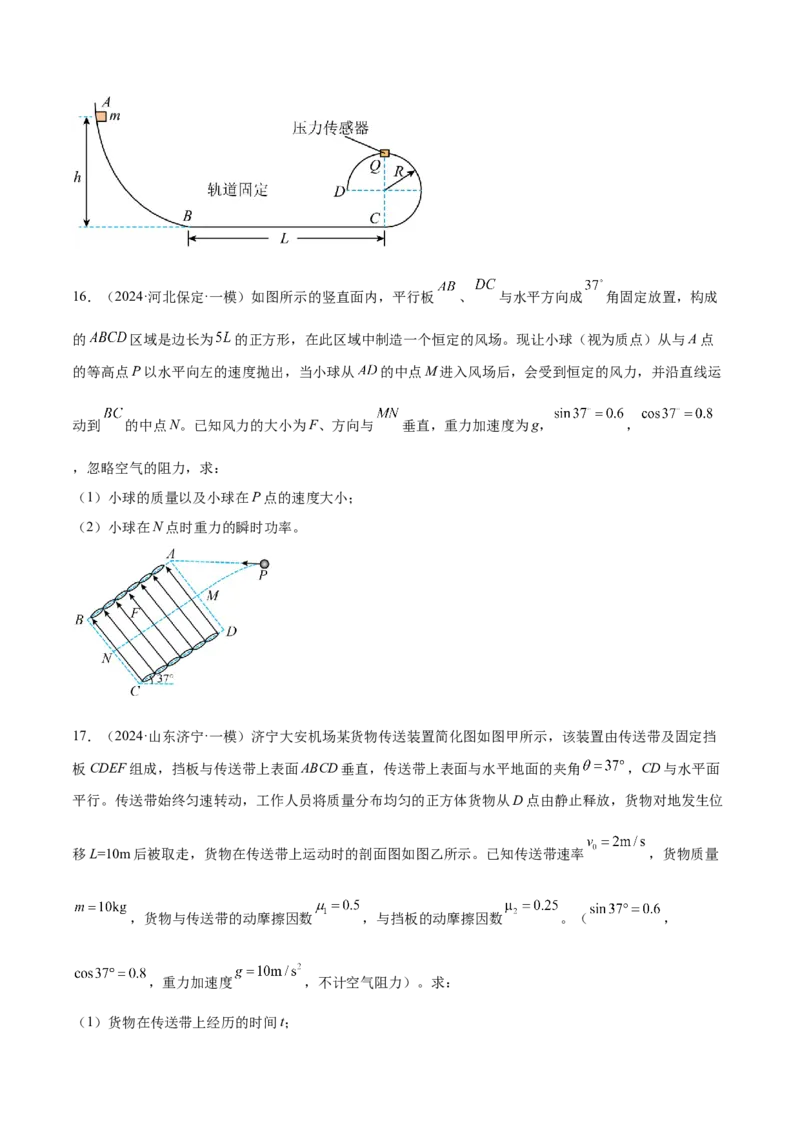
15.(2024·四川广安·二模)某同学研究碰撞中动能损失的装置如图所示,竖直面内,光滑弧形轨道AB和
光滑圆弧轨道CD分别与水平粗糙轨道BC相切于B和C点,圆弧半径R=0.4m,BC长L=2m。某次实验
中,将质量m=0.4kg的滑块从弧形轨道上高h=1.4m处静止释放,滑块第一次通过圆弧轨道最高点Q时对
轨道的压力大小F=4N,此后,滑块与水平轨道发生时间极短的碰撞后速度方向竖直向上,进入轨道后滑
块刚好能够通过Q点。滑块可视为质点,重力加速度g=10m/s2。求:
(1)滑块与水平轨道间的动摩擦因数μ:
(2)碰撞过程中动能的损失率η(动能损失量与碰前动能的百分比)。16.(2024·河北保定·一模)如图所示的竖直面内,平行板 、 与水平方向成 角固定放置,构成
的 区域是边长为 的正方形,在此区域中制造一个恒定的风场。现让小球(视为质点)从与A点
的等高点P以水平向左的速度抛出,当小球从 的中点M进入风场后,会受到恒定的风力,并沿直线运
动到 的中点N。已知风力的大小为F、方向与 垂直,重力加速度为g, ,
,忽略空气的阻力,求:
(1)小球的质量以及小球在P点的速度大小;
(2)小球在N点时重力的瞬时功率。
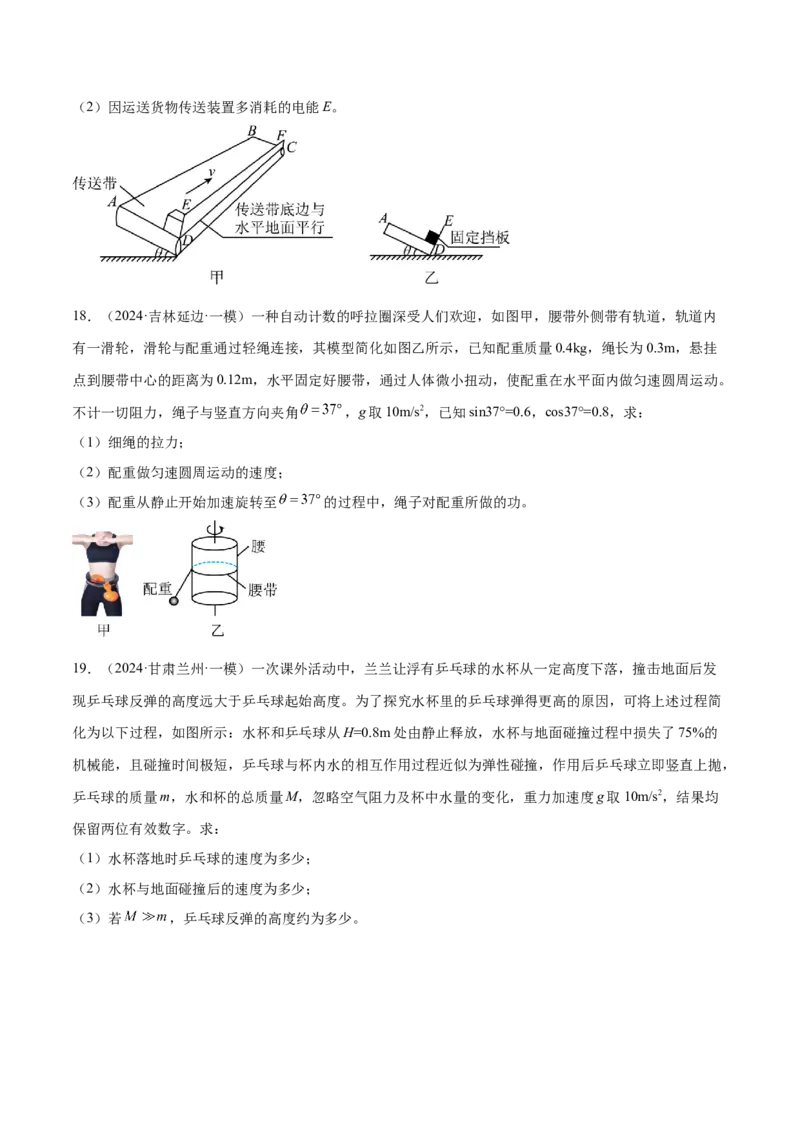
17.(2024·山东济宁·一模)济宁大安机场某货物传送装置简化图如图甲所示,该装置由传送带及固定挡
板CDEF组成,挡板与传送带上表面ABCD垂直,传送带上表面与水平地面的夹角 ,CD与水平面
平行。传送带始终匀速转动,工作人员将质量分布均匀的正方体货物从D点由静止释放,货物对地发生位
移L=10m后被取走,货物在传送带上运动时的剖面图如图乙所示。已知传送带速率 ,货物质量
,货物与传送带的动摩擦因数 ,与挡板的动摩擦因数 。( ,
,重力加速度 ,不计空气阻力)。求:
(1)货物在传送带上经历的时间t;(2)因运送货物传送装置多消耗的电能E。
18.(2024·吉林延边·一模)一种自动计数的呼拉圈深受人们欢迎,如图甲,腰带外侧带有轨道,轨道内
有一滑轮,滑轮与配重通过轻绳连接,其模型简化如图乙所示,已知配重质量0.4kg,绳长为0.3m,悬挂
点到腰带中心的距离为0.12m,水平固定好腰带,通过人体微小扭动,使配重在水平面内做匀速圆周运动。
不计一切阻力,绳子与竖直方向夹角 ,g取10m/s2,已知sin37°=0.6,cos37°=0.8,求:
(1)细绳的拉力;
(2)配重做匀速圆周运动的速度;
(3)配重从静止开始加速旋转至 的过程中,绳子对配重所做的功。
19.(2024·甘肃兰州·一模)一次课外活动中,兰兰让浮有乒乓球的水杯从一定高度下落,撞击地面后发
现乒乓球反弹的高度远大于乒乓球起始高度。为了探究水杯里的乒乓球弹得更高的原因,可将上述过程简
化为以下过程,如图所示:水杯和乒乓球从H=0.8m处由静止释放,水杯与地面碰撞过程中损失了75%的
机械能,且碰撞时间极短,乒乓球与杯内水的相互作用过程近似为弹性碰撞,作用后乒乓球立即竖直上抛,
乒乓球的质量m,水和杯的总质量M,忽略空气阻力及杯中水量的变化,重力加速度g取10m/s2,结果均
保留两位有效数字。求:
(1)水杯落地时乒乓球的速度为多少;
(2)水杯与地面碰撞后的速度为多少;
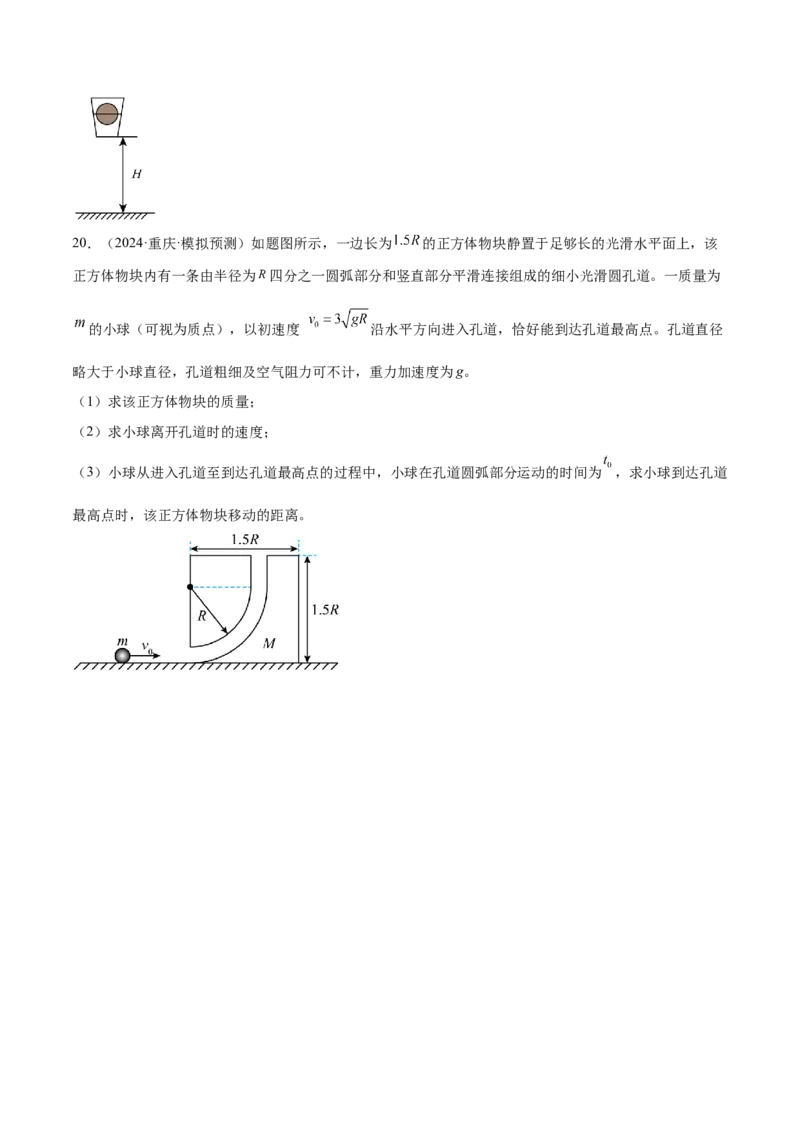
(3)若 ,乒乓球反弹的高度约为多少。20.(2024·重庆·模拟预测)如题图所示,一边长为 的正方体物块静置于足够长的光滑水平面上,该
正方体物块内有一条由半径为 四分之一圆弧部分和竖直部分平滑连接组成的细小光滑圆孔道。一质量为
的小球(可视为质点),以初速度 沿水平方向进入孔道,恰好能到达孔道最高点。孔道直径
略大于小球直径,孔道粗细及空气阻力可不计,重力加速度为g。
(1)求该正方体物块的质量;
(2)求小球离开孔道时的速度;
(3)小球从进入孔道至到达孔道最高点的过程中,小球在孔道圆弧部分运动的时间为 ,求小球到达孔道
最高点时,该正方体物块移动的距离。

