 夜雨聆风
夜雨聆风





SINA_POS功能说明(软件限位、硬件限位、回零、相对定位、绝对定位、程序块、点动)

放
假
通
知

一
二
三
四
五
六
日
27
十一
28
十二
29
十三
30
十四
休
1
劳动节
休
2
十六
休
3
十七
休
4
青年节
休
5
立夏
6
二十
7
廿一
8
廿二
9
廿三
10
母亲节
国际劳动节又称“五一国际劳动节”“国际示威游行日”,是世界上80多个国家的全国性节日。定在每年的五月一日。它是全世界劳动人民共同拥有的节日。

前言
SINA_POS功能块是EPOS控制的核心,SINA_POS 这个功能块各种运行模式具体怎么用,回零怎么做,限位怎么设。今天这篇就把 SINA_POS 的常用功能拆开揉碎了讲一遍,大家可以直接当操作手册来查。
01
SINA_POS 的运行条件
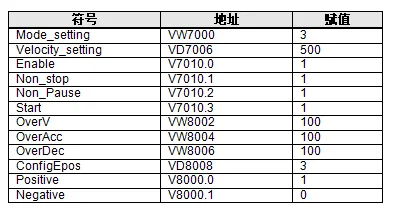
不管用哪种模式,有几个前提条件是通用的,先设对了再往下走:
-
ModePos 不能为 0。模式之间可以在运行中切换,比如从连续运行(ModePos=3)直接切到绝对定位(ModePos=2)。
-
EnableAxis = 1 给上升沿并保持,驱动器正常使能后,Status_table 里的 Axisenabled 位会变成 1,说明轴已经准备好了。
-
CancelTraversing = 1,IntermediateStop = 1。这两个信号除了点动模式之外,所有模式都需要保持为 1。一个负责取消任务,一个负责暂停任务。
CancelTraversing=0 时,轴按最大减速度 p2573 急停,当前任务数据丢弃,停稳后可以切换模式。
IntermediateStop=0 时,轴用当前设定减速度斜坡停车,任务保留着,再给回 1 它继续跑,相当于一个暂停键。
-
Control_table 里的 ConfigEpos 必须设为 3。也就是说第 0 位和第 1 位都要是 1。
这些条件配好,后面的工作就是选模式和填参数了。
02
相对定位(ModePos=1)
相对定位是最常用的模式之一,以当前位置为基准移动一段距离。
要求:
-
Jog1 和 Jog2 必须为 0
-
轴可以不回零,也不需要对绝对值编码器做校准
-
CancelTraversing=1,IntermediateStop=1
-
ConfigEpos 设为 3
怎么做:
填入目标位置 Position(单位 LU),速度 Velocity(单位 1000LU/min),运动方向由 Position 的正负号自动决定。OverV、OverAcc、OverDec 这几个速度、加减速倍率一般用默认值就行,除非有特殊需求。
EnableAxis 保持为 1,给 Execute 一个上升沿,定位就触发了。到了目标位置后,Done 信号会置 1。

03
绝对定位(ModePos=2)
跟相对定位的区别在于,目标位置是相对于零点坐标系的。
前提:轴必须已经回过零,或者绝对值编码器已经校准过。 不然驱动器不知道“绝对位置”的参考基准在哪里。
要求:
-
Jog1、Jog2 设为 0
-
Positive 和 Negative 必须为 0,运动方向由目标位置自动决定
-
CancelTraversing=1,IntermediateStop=1
-
ConfigEpos 设为 3
填入目标位置 Position 和速度 Velocity,EnableAxis 保持,给 Execute 上升沿触发。

04
连续运行模式(ModePos=3)
这个模式让轴以一个恒定速度一直转,适合输送带、搅拌这类不需要目标位置的场景。
要求:
-
Jog1、Jog2 为 0
-
轴可以不用回零
-
CancelTraversing=1,IntermediateStop=1
-
ConfigEpos 设为 3
填入速度 Velocity,运转方向由 Positive 和 Negative 决定,两个信号互斥,不能同时为 1。Execute 上升沿启动。
05
主动回零(ModePos=4)
位置控制绕不开回零。这里讲最常见的增量编码器 V90 配参考挡块加编码器零脉冲的方式。
回零开关接到 PLC 的一个数字量输入点,在程序里把这个 DI 点的状态关联到 SINA_POS 功能块的 ConfigEpos 的 bit6。
V90 参数: p29240 设为 1,选择参考挡块加零脉冲回零方式。
PLC 侧:
-
ModePos = 4
-
CancelTraversing=1,IntermediateStop=1
-
Jog1、Jog2 设为 0
-
ConfigEpos 的 bit0 和 bit1 必须为 1
-
Positive 和 Negative 决定回零方向
-
EnableAxis=1,给 Execute 上升沿触发,而且回零过程中 Execute 要保持高电平
回零完成后,Status_table 里的 AxisRef 会置 1,表示轴已回零。

06
直接设置回零位置(ModePos=5)
这个模式允许轴在任意位置直接设定当前点为原点,不用实际走回零动作。
要求: 轴必须静止,可以处于使能状态。ModePos=5,Execute 给上升沿,轴的零点就被设成了驱动参数 p2599 里预设的值。

07
程序块运行(ModePos=6)
V90 内部可以存多个运行程序段,每个程序段预设好目标位置、速度、加减速。PLC 这边只需要发一个程序段号,驱动自己按预设参数跑。
前提: 轴必须已回零或绝对值编码器已校准,且轴处于静止状态。
做法:
-
ModePos=6
-
CancelTraversing=1,IntermediateStop=1,Jog1、Jog2 设为 0
-
ConfigEpos 设为 3
-
Position 里填程序段号,取值 0~16
-
Positive 和 Negative 必须为 0,方向跟着程序段里预设的走
-
EnableAxis=1,Execute 上升沿触发
OverV、OverAcc、OverDec 可以在 PLC 侧对预设值做倍率缩放,一般保持默认 100%。

08
速度点动(ModePos=7)
调试时手动跑一下轴,用点动最方便。
要求: 轴静止,不用回零。ConfigEpos=3,CancelTraversing 和 IntermediateStop 与点动无关,默认给 1 就行。
操作:
点动速度在 V90 参数里设好(P2585 负向、P2586 正向),默认 Jog1 是负向、Jog2 是正向。PLC 侧直接给 Jog1 或 Jog2 信号,轴就跑起来了,松开就停。

09
距离点动(ModePos=8)
跟速度点动类似,但它是每次触发走一个固定距离。
要求同上。 点动距离在 V90 参数里设(P2587、P2588),默认一次 1000LU。Jog1 一个上升沿走一段负向距离,Jog2 走一段正向距离。

10
硬件限位怎么接?
硬件限位开关接到 V90 驱动器定义好的 DI 点上(DI1~DI4 里选两个分配给 CWL 和 CCWL)。然后在 Control_table 里把 ConfigEpos 的第 3 位(POS_STW2.15)置 1,激活硬件限位功能。
激活之后,只有当限位开关信号为高电平时轴才能运转,碰到限位就自动停了。

11
软件限位怎么激活?
在 Control_table 里把 ConfigEpos 的第 2 位(POS_STW2.14)置 1,然后在 V90 参数里设 p2580(负向软限位)和 p2581(正向软限位)。轴运行到软件限定位置会自动停下来。
12
绝对值编码器怎么校准回零?
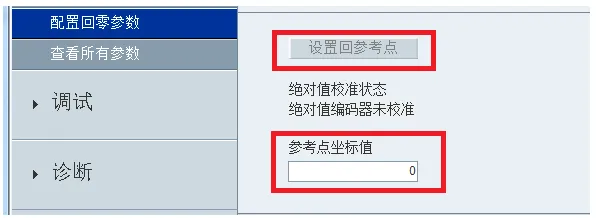
绝对值编码器不用每次上电都跑回零,但初次安装或更换设备后需要校准一次零点。有三种方式:
1、V-ASSISTANT 软件:把机械移到零点位置,点击“设置回参考点”,当前坐标就被写入 p2599,再保存到 ROM 即可。
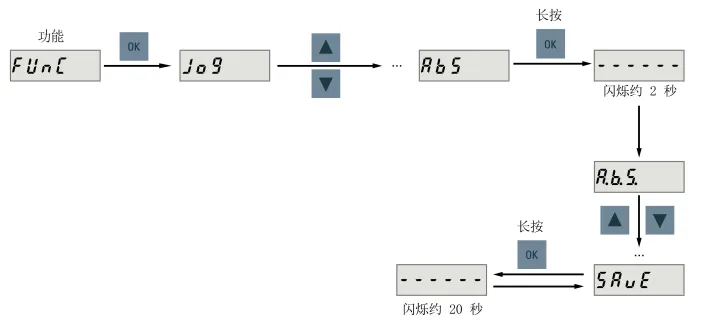
2、BOP 面板操作:通过面板菜单进入 ABS 功能,设置当前位置为零位,校准值同样保存在 p2599,设完记得保存参数。
3、也可以在 PLC 侧通过 ModePos=5 的方式直接设置零点位置。


往期内容