文档内容
第 07 讲 共点力的平衡
目录
01、考情透视,目标导
航
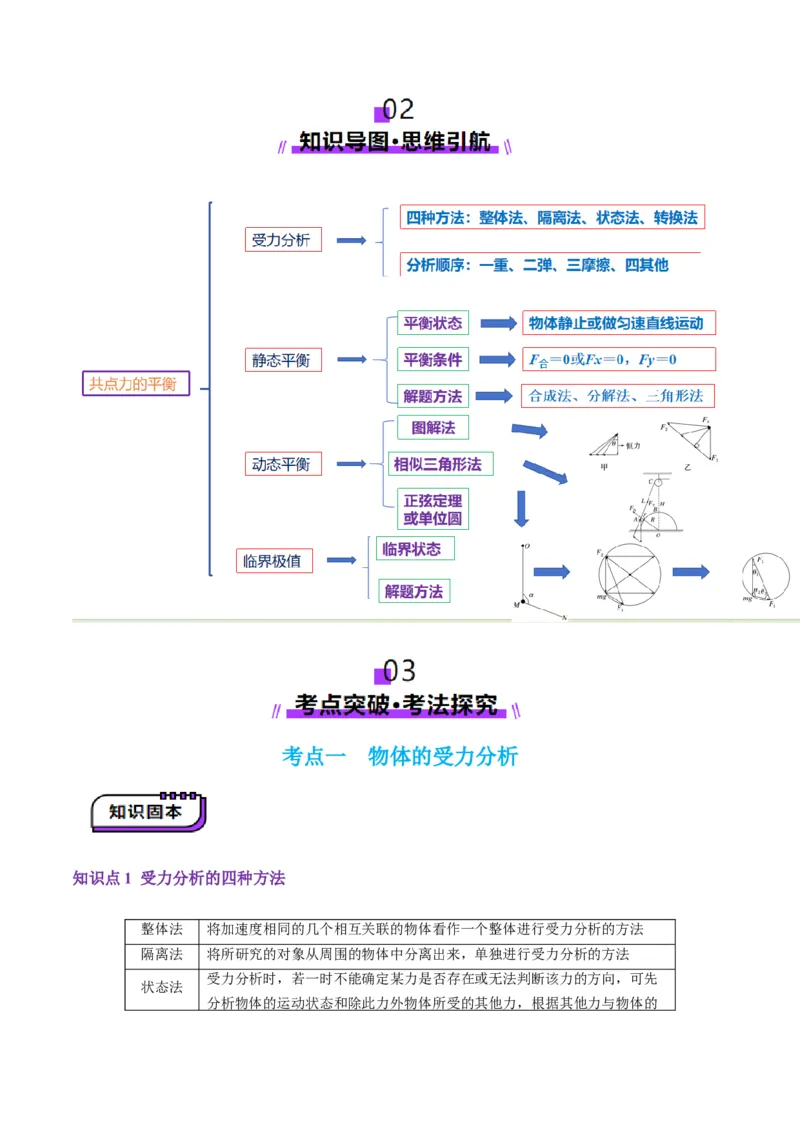
02、知识导图、思维引航.............................................................................................3
03、考点突破考法探究.................................................................................................3
考点一 物体的受力分析....................................................................................................................3
知识点1 受力分析的四种方法...........................................................................................................3
知识点2.受力分析的注意事项.........................................................................................................4
知识点3 受力分析的一般步骤...........................................................................................................4
考向1 应用整体法与隔离法处理受力分析问题...............................................................................4
考向2 应用状态法解决情境化问题中的受力分析问题...................................................................5
考向3 应用转化法解决叠加体中的受力分析问题...........................................................................5
考点二 共点力的静态平衡..................................................................................................................6
知识点1.共点力的平衡.....................................................................................................................6
知识点2.求解共点力平衡问题的常用方法.....................................................................................7
知识点3 多物体的静态平衡问题.......................................................................................................7
考向1 解答静态平衡问题的三种常用方法.......................................................................................7
考向2 应用整体法和隔离法解决多物体静态平衡问题.................................................................10
考向3 立体空间共点力的平衡问题.................................................................................................11
考点三动态平衡问题..........................................................................................................................12
知识点1 动态平衡问题的常见类型.................................................................................................12
知识点2 解决动态平衡常用方法.....................................................................................................13
考向1 应用解析法解决动态平衡问题.............................................................................................14
考向2 应用图解法解决动态平衡问题.............................................................................................15
考向3 应用相似三角形法解决动态平衡问题.................................................................................17
考向4 应用矢量圆法(正弦定理法)解决动态平衡问题...................................................................18
考点四 平衡中的临界与极值问题....................................................................................................20
知识点1.临界、极值问题特征..........................................................................................................20知识点2.解决极值和临界问题的三种方法......................................................................................20
考向1 应用物理分析法解决平衡中的临界极值问题...................................................................21
考向2 应用数学分析法解决平衡中的临界极值问题...................................................................22
考向3 应用极限分析法解决平衡中的临界极值问题...................................................................22
04、真题练习、命题洞见...........................................................................................23
2024·山东·高考物理试题
2024·全国·高考物理试题
考情 2024·湖北·高考物理试题
分析 2024·河北·高考物理试题
2024·浙江·高考物理试题
2023·河北·高考物理试题
生活中的重力、弹力、摩擦力的平衡,牵引物体、船只、机器
试题 生活实践类
人
情境
学习探究类 斜面以及各类接触面
复习
目标一:熟练掌握受力分析的步骤,会灵活应用整体法、隔离法并结合牛顿
目标 第三定律进行受力分析。
目标二:理解共点力平衡的条件,会解决共点力平衡问题。考点一 物体的受力分析
知识点1 受力分析的四种方法
整体法 将加速度相同的几个相互关联的物体看作一个整体进行受力分析的方法
隔离法 将所研究的对象从周围的物体中分离出来,单独进行受力分析的方法
受力分析时,若一时不能确定某力是否存在或无法判断该力的方向,可先
状态法
分析物体的运动状态和除此力外物体所受的其他力,根据其他力与物体的运动状态是否相符来判断
在受力分析时,若不能确定某力是否存在,则
(1)可以转换为分析该力的反作用力,根据其反作用力是否存在,判断该力
转换法 是否存在
(2)可以转换为分析与该力相关的其他研究对象,通过对其他研究对象进行
受力分析,判断该力是否存在
知识点2.受力分析的注意事项
(1)不要把研究对象所受的力与研究对象对其他物体的作用力混淆。养成按照一定顺序对研究对象进行
受力分析的习惯。
(2)涉及弹簧弹力时,要注意拉伸或压缩可能性分析。分析摩擦力时要特别注意摩擦力的方向。
(3)除了根据力的性质和特点进行判断,假设法是判断弹力、摩擦力有无及方向的常用方法。
(4)善于转换研究对象,尤其是弹力、摩擦力的方向不易判定的情形,可以分析与其接触物体的受力,
再应用牛顿第三定律判定。
知识点3 受力分析的一般步骤
考向1 应用整体法与隔离法处理受力分析问题
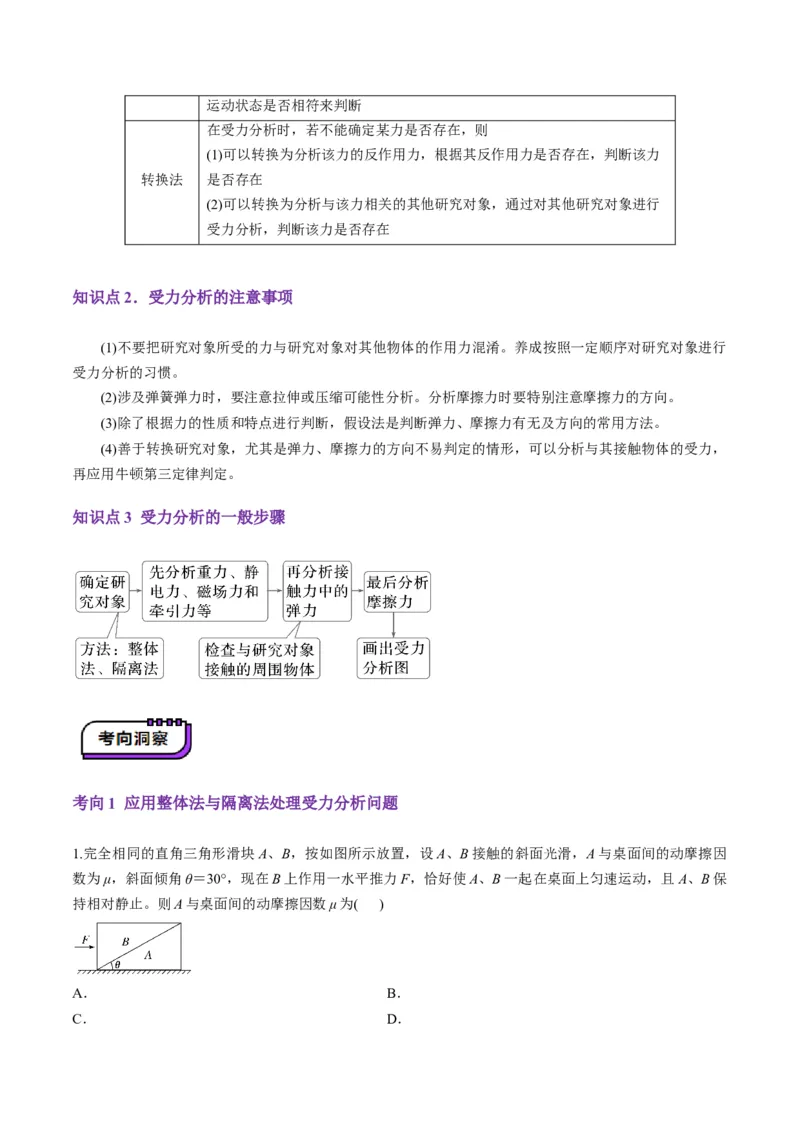
1.完全相同的直角三角形滑块A、B,按如图所示放置,设A、B接触的斜面光滑,A与桌面间的动摩擦因
数为μ,斜面倾角θ=30°,现在B上作用一水平推力F,恰好使A、B一起在桌面上匀速运动,且A、B保
持相对静止。则A与桌面间的动摩擦因数μ为( )
A. B.
C. D.【答案】A
【解析】: 对整体受力分析,在水平方向上受推力和滑动摩擦力,有 F=2μmg;对B受力分析,B受到
重力、推力F和支持力,根据共点力平衡有tan θ=,联立解得μ==,故B、C、D错误,A正确。
考向2 应用状态法解决情境化问题中的受力分析问题
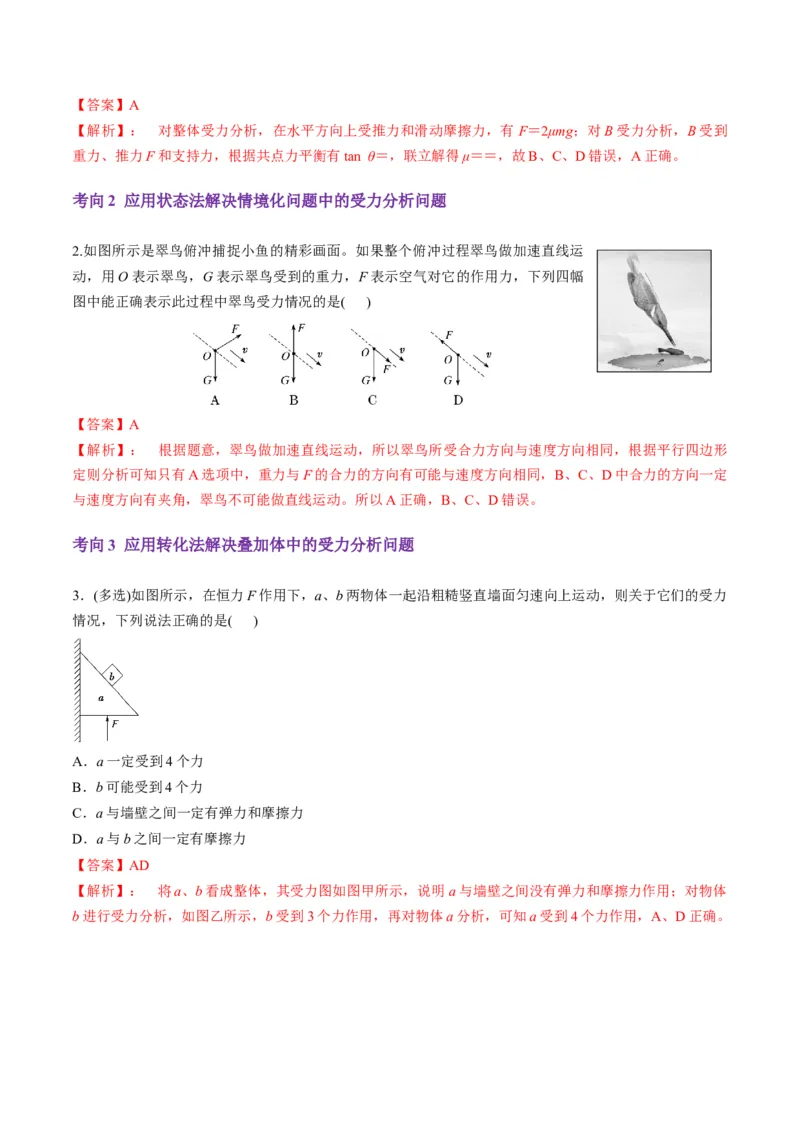
2.如图所示是翠鸟俯冲捕捉小鱼的精彩画面。如果整个俯冲过程翠鸟做加速直线运
动,用O表示翠鸟,G表示翠鸟受到的重力,F表示空气对它的作用力,下列四幅
图中能正确表示此过程中翠鸟受力情况的是( )
【答案】A
【解析】: 根据题意,翠鸟做加速直线运动,所以翠鸟所受合力方向与速度方向相同,根据平行四边形
定则分析可知只有A选项中,重力与F的合力的方向有可能与速度方向相同,B、C、D中合力的方向一定
与速度方向有夹角,翠鸟不可能做直线运动。所以A正确,B、C、D错误。
考向3 应用转化法解决叠加体中的受力分析问题
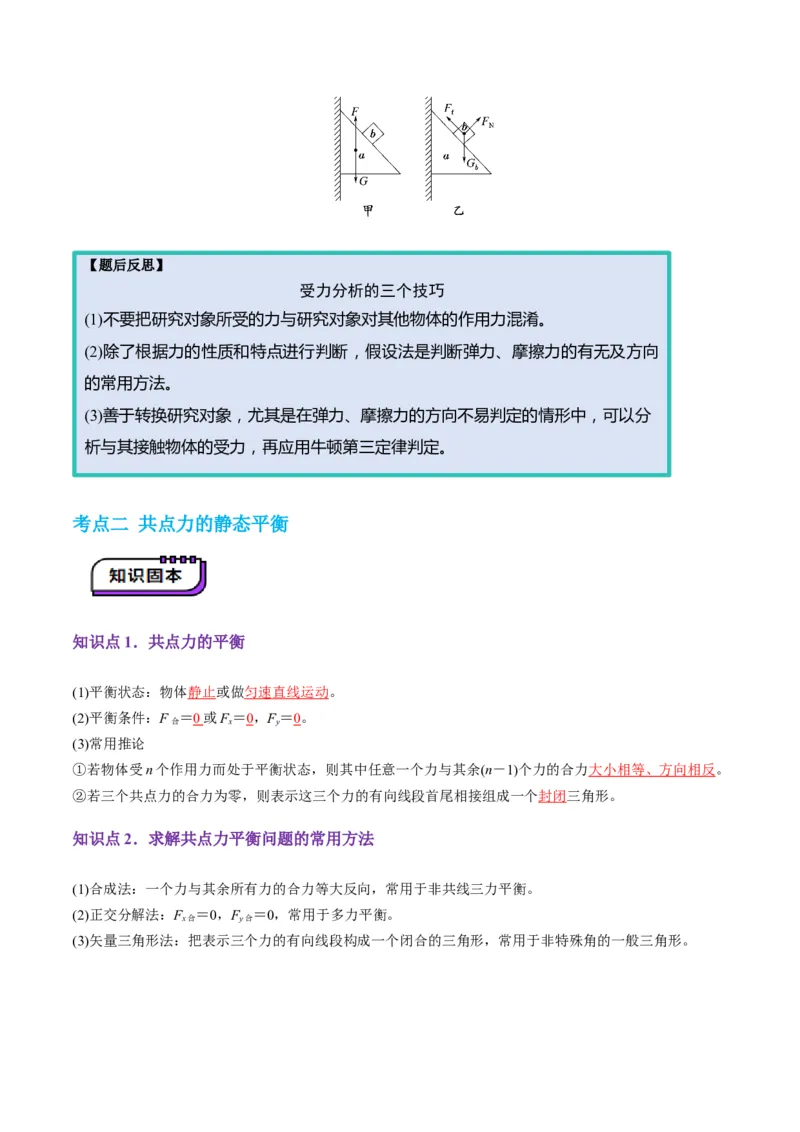
3.(多选)如图所示,在恒力F作用下,a、b两物体一起沿粗糙竖直墙面匀速向上运动,则关于它们的受力
情况,下列说法正确的是( )
A.a一定受到4个力
B.b可能受到4个力
C.a与墙壁之间一定有弹力和摩擦力
D.a与b之间一定有摩擦力
【答案】AD
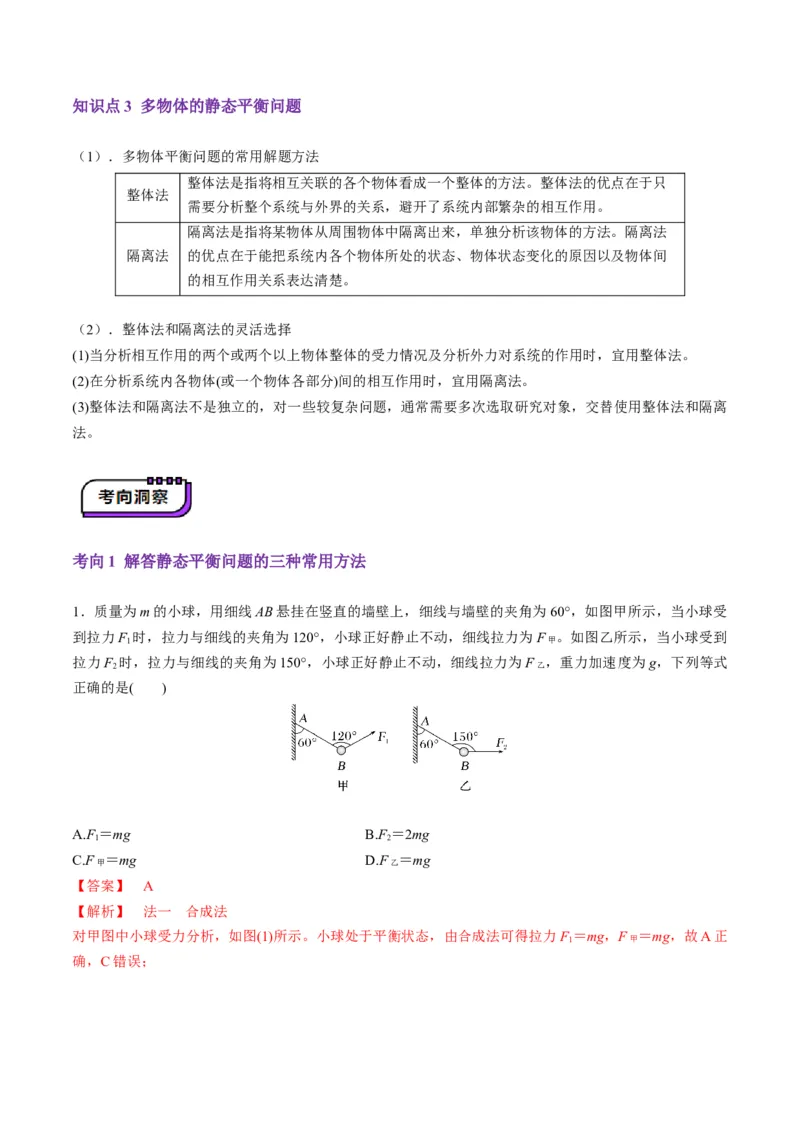
【解析】: 将a、b看成整体,其受力图如图甲所示,说明a与墙壁之间没有弹力和摩擦力作用;对物体
b进行受力分析,如图乙所示,b受到3个力作用,再对物体a分析,可知a受到4个力作用,A、D正确。【题后反思】
受力分析的三个技巧
(1)不要把研究对象所受的力与研究对象对其他物体的作用力混淆。
(2)除了根据力的性质和特点进行判断,假设法是判断弹力、摩擦力的有无及方向
的常用方法。
(3)善于转换研究对象,尤其是在弹力、摩擦力的方向不易判定的情形中,可以分
析与其接触物体的受力,再应用牛顿第三定律判定。
考点二 共点力的静态平衡
知识点1.共点力的平衡
(1)平衡状态:物体静止或做匀速直线运动。
(2)平衡条件:F =0 或F=0,F=0。
合 x y
(3)常用推论
①若物体受n个作用力而处于平衡状态,则其中任意一个力与其余(n-1)个力的合力大小相等、方向相反。
②若三个共点力的合力为零,则表示这三个力的有向线段首尾相接组成一个封闭三角形。
知识点2.求解共点力平衡问题的常用方法
(1)合成法:一个力与其余所有力的合力等大反向,常用于非共线三力平衡。
(2)正交分解法:F =0,F =0,常用于多力平衡。
x合 y合
(3)矢量三角形法:把表示三个力的有向线段构成一个闭合的三角形,常用于非特殊角的一般三角形。知识点3 多物体的静态平衡问题
(1).多物体平衡问题的常用解题方法
整体法是指将相互关联的各个物体看成一个整体的方法。整体法的优点在于只
整体法
需要分析整个系统与外界的关系,避开了系统内部繁杂的相互作用。
隔离法是指将某物体从周围物体中隔离出来,单独分析该物体的方法。隔离法
隔离法 的优点在于能把系统内各个物体所处的状态、物体状态变化的原因以及物体间
的相互作用关系表达清楚。
(2).整体法和隔离法的灵活选择
(1)当分析相互作用的两个或两个以上物体整体的受力情况及分析外力对系统的作用时,宜用整体法。
(2)在分析系统内各物体(或一个物体各部分)间的相互作用时,宜用隔离法。
(3)整体法和隔离法不是独立的,对一些较复杂问题,通常需要多次选取研究对象,交替使用整体法和隔离
法。
考向1 解答静态平衡问题的三种常用方法
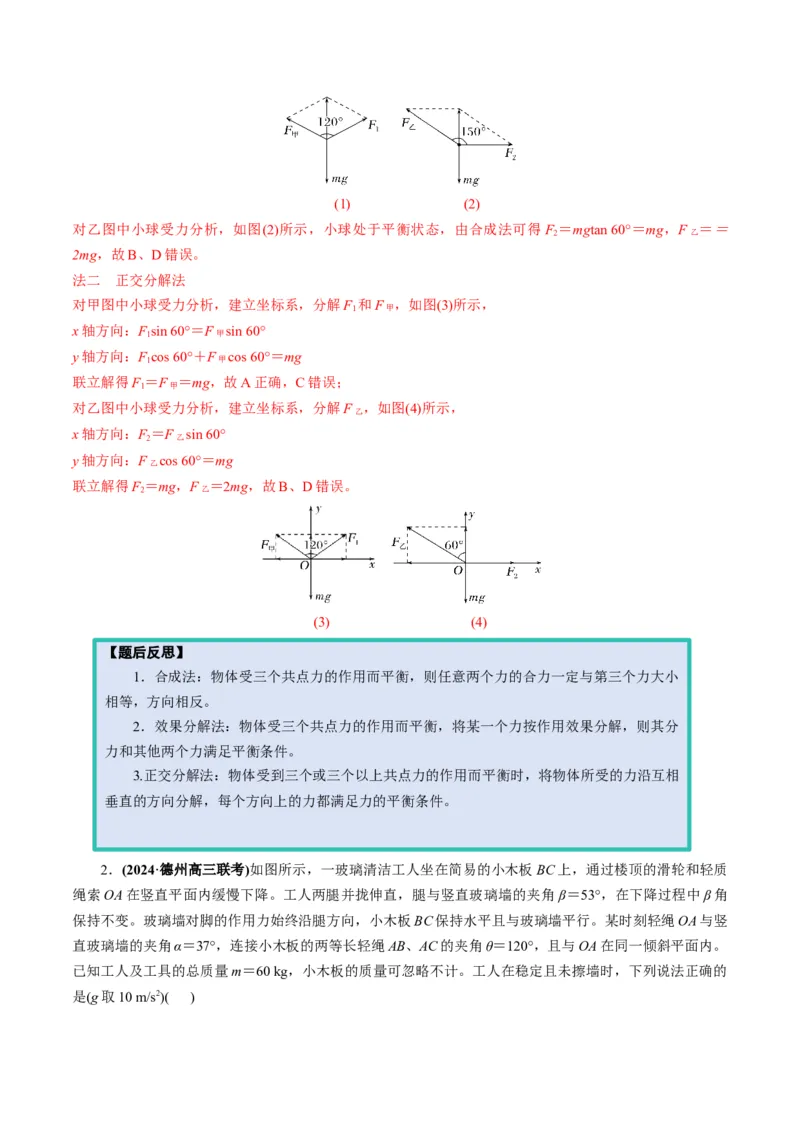
1.质量为m的小球,用细线AB悬挂在竖直的墙壁上,细线与墙壁的夹角为 60°,如图甲所示,当小球受
到拉力F 时,拉力与细线的夹角为120°,小球正好静止不动,细线拉力为F 。如图乙所示,当小球受到
1 甲
拉力F 时,拉力与细线的夹角为150°,小球正好静止不动,细线拉力为F ,重力加速度为g,下列等式
2 乙
正确的是( )
A.F=mg B.F=2mg
1 2
C.F =mg D.F =mg
甲 乙
【答案】 A
【解析】 法一 合成法
对甲图中小球受力分析,如图(1)所示。小球处于平衡状态,由合成法可得拉力F =mg,F =mg,故A正
1 甲
确,C错误;(1) (2)
对乙图中小球受力分析,如图(2)所示,小球处于平衡状态,由合成法可得F =mgtan 60°=mg,F ==
2 乙
2mg,故B、D错误。
法二 正交分解法
对甲图中小球受力分析,建立坐标系,分解F 和F ,如图(3)所示,
1 甲
x轴方向:Fsin 60°=F sin 60°
1 甲
y轴方向:Fcos 60°+F cos 60°=mg
1 甲
联立解得F=F =mg,故A正确,C错误;
1 甲
对乙图中小球受力分析,建立坐标系,分解F ,如图(4)所示,
乙
x轴方向:F=F sin 60°
2 乙
y轴方向:F cos 60°=mg
乙
联立解得F=mg,F =2mg,故B、D错误。
2 乙
(3) (4)
【题后反思】
1.合成法:物体受三个共点力的作用而平衡,则任意两个力的合力一定与第三个力大小
相等,方向相反。
2.效果分解法:物体受三个共点力的作用而平衡,将某一个力按作用效果分解,则其分
力和其他两个力满足平衡条件。
3.正交分解法:物体受到三个或三个以上共点力的作用而平衡时,将物体所受的力沿互相
垂直的方向分解,每个方向上的力都满足力的平衡条件。
2.(2024·德州高三联考)如图所示,一玻璃清洁工人坐在简易的小木板BC上,通过楼顶的滑轮和轻质
绳索OA在竖直平面内缓慢下降。工人两腿并拢伸直,腿与竖直玻璃墙的夹角β=53°,在下降过程中β角
保持不变。玻璃墙对脚的作用力始终沿腿方向,小木板BC保持水平且与玻璃墙平行。某时刻轻绳OA与竖
直玻璃墙的夹角α=37°,连接小木板的两等长轻绳AB、AC的夹角θ=120°,且与OA在同一倾斜平面内。
已知工人及工具的总质量m=60 kg,小木板的质量可忽略不计。工人在稳定且未擦墙时,下列说法正确的
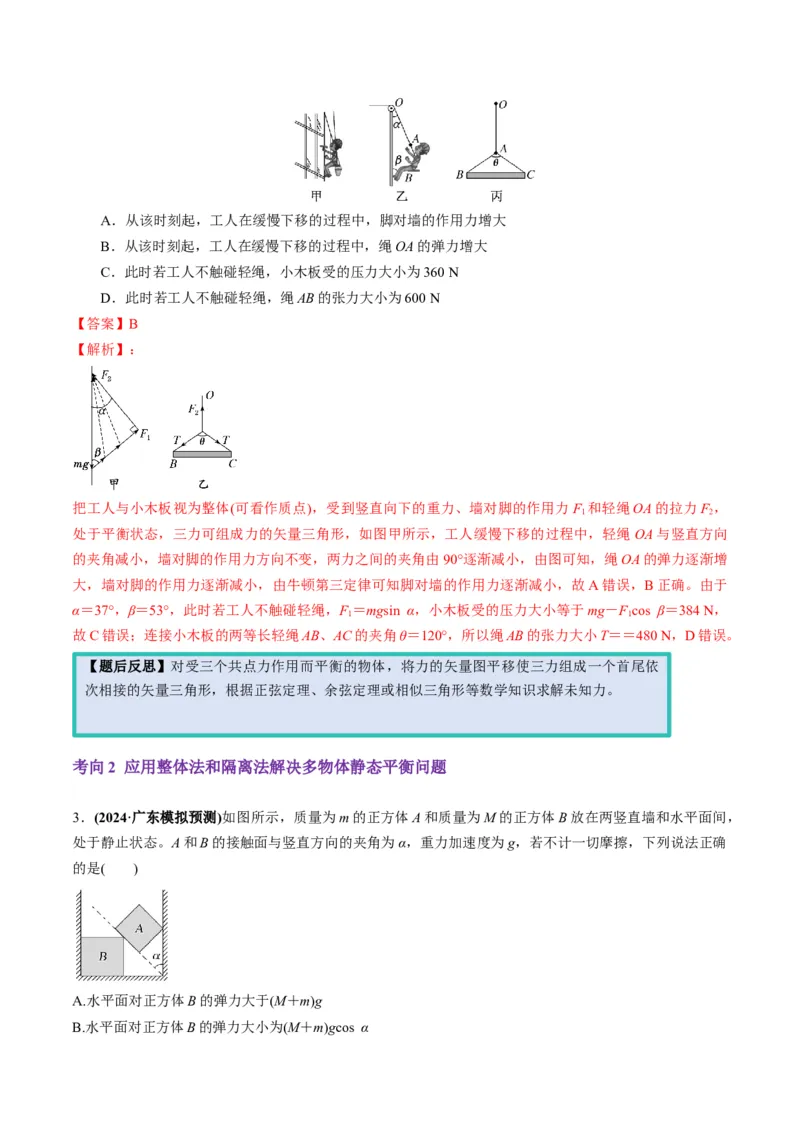
是(g取10 m/s2)( )A.从该时刻起,工人在缓慢下移的过程中,脚对墙的作用力增大
B.从该时刻起,工人在缓慢下移的过程中,绳OA的弹力增大
C.此时若工人不触碰轻绳,小木板受的压力大小为360 N
D.此时若工人不触碰轻绳,绳AB的张力大小为600 N
【答案】B
【解析】:
把工人与小木板视为整体(可看作质点),受到竖直向下的重力、墙对脚的作用力F 和轻绳OA的拉力F ,
1 2
处于平衡状态,三力可组成力的矢量三角形,如图甲所示,工人缓慢下移的过程中,轻绳 OA与竖直方向
的夹角减小,墙对脚的作用力方向不变,两力之间的夹角由90°逐渐减小,由图可知,绳OA的弹力逐渐增
大,墙对脚的作用力逐渐减小,由牛顿第三定律可知脚对墙的作用力逐渐减小,故A错误,B正确。由于
α=37°,β=53°,此时若工人不触碰轻绳,F =mgsin α,小木板受的压力大小等于mg-Fcos β=384 N,
1 1
故C错误;连接小木板的两等长轻绳AB、AC的夹角θ=120°,所以绳AB的张力大小T==480 N,D错误。
【题后反思】对受三个共点力作用而平衡的物体,将力的矢量图平移使三力组成一个首尾依
次相接的矢量三角形,根据正弦定理、余弦定理或相似三角形等数学知识求解未知力。
考向2 应用整体法和隔离法解决多物体静态平衡问题
3.(2024·广东模拟预测)如图所示,质量为m的正方体A和质量为M的正方体B放在两竖直墙和水平面间,
处于静止状态。A和B的接触面与竖直方向的夹角为α,重力加速度为g,若不计一切摩擦,下列说法正确
的是( )
A.水平面对正方体B的弹力大于(M+m)g
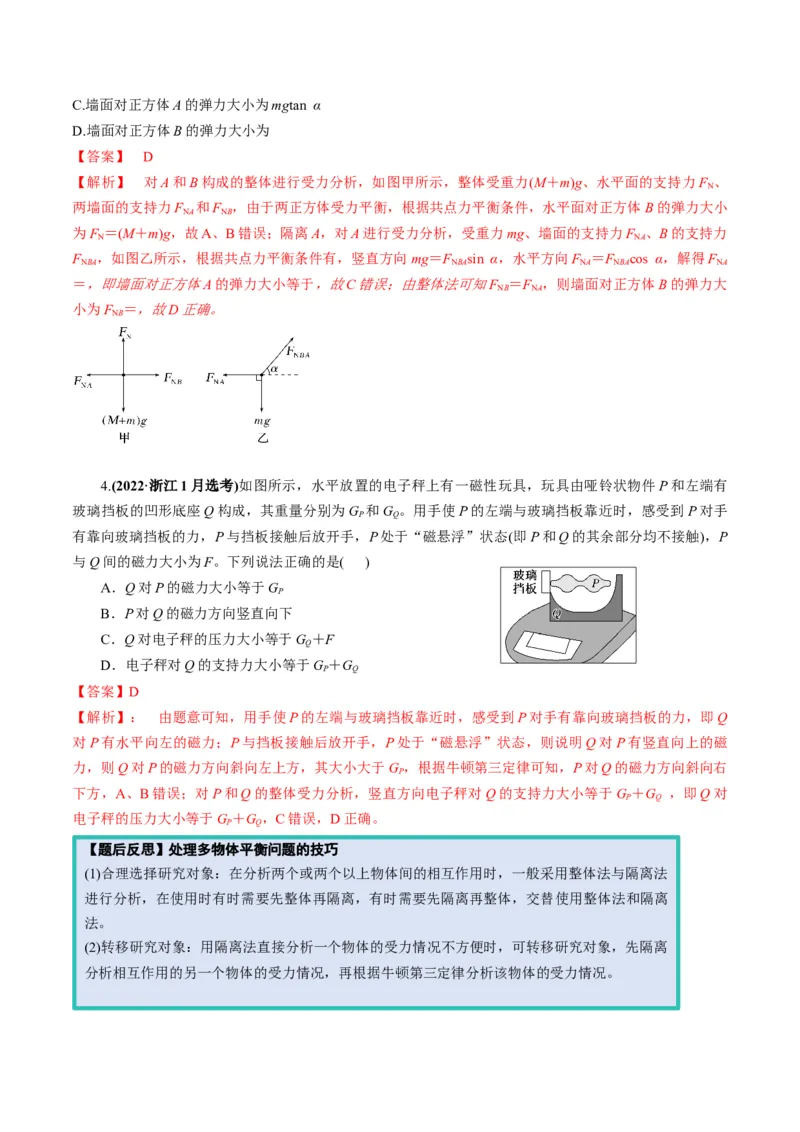
B.水平面对正方体B的弹力大小为(M+m)gcos αC.墙面对正方体A的弹力大小为mgtan α
D.墙面对正方体B的弹力大小为
【答案】 D
【解析】 对A和B构成的整体进行受力分析,如图甲所示,整体受重力(M+m)g、水平面的支持力F 、
N
两墙面的支持力F 和F ,由于两正方体受力平衡,根据共点力平衡条件,水平面对正方体 B的弹力大小
NA NB
为F =(M+m)g,故A、B错误;隔离A,对A进行受力分析,受重力mg、墙面的支持力F 、B的支持力
N NA
F ,如图乙所示,根据共点力平衡条件有,竖直方向 mg=F sin α,水平方向F =F cos α,解得F
NBA NBA NA NBA NA
=,即墙面对正方体A的弹力大小等于,故C错误;由整体法可知F =F ,则墙面对正方体B的弹力大
NB NA
小为F =,故D正确。
NB
4.(2022·浙江1月选考)如图所示,水平放置的电子秤上有一磁性玩具,玩具由哑铃状物件P和左端有
玻璃挡板的凹形底座Q构成,其重量分别为G 和G 。用手使P的左端与玻璃挡板靠近时,感受到P对手
P Q
有靠向玻璃挡板的力,P与挡板接触后放开手,P处于“磁悬浮”状态(即P和Q的其余部分均不接触),P
与Q间的磁力大小为F。下列说法正确的是( )
A.Q对P的磁力大小等于G
P
B.P对Q的磁力方向竖直向下
C.Q对电子秤的压力大小等于G +F
Q
D.电子秤对Q的支持力大小等于G +G
P Q
【答案】D
【解析】: 由题意可知,用手使P的左端与玻璃挡板靠近时,感受到P对手有靠向玻璃挡板的力,即Q
对P有水平向左的磁力;P与挡板接触后放开手,P处于“磁悬浮”状态,则说明Q对P有竖直向上的磁
力,则Q对P的磁力方向斜向左上方,其大小大于G ,根据牛顿第三定律可知,P对Q的磁力方向斜向右
P
下方,A、B错误;对P和Q的整体受力分析,竖直方向电子秤对Q的支持力大小等于G +G ,即Q对
P Q
电子秤的压力大小等于G +G ,C错误,D正确。
P Q
【题后反思】处理多物体平衡问题的技巧
(1)合理选择研究对象:在分析两个或两个以上物体间的相互作用时,一般采用整体法与隔离法
进行分析,在使用时有时需要先整体再隔离,有时需要先隔离再整体,交替使用整体法和隔离
法。
(2)转移研究对象:用隔离法直接分析一个物体的受力情况不方便时,可转移研究对象,先隔离
分析相互作用的另一个物体的受力情况,再根据牛顿第三定律分析该物体的受力情况。考向3 立体空间共点力的平衡问题
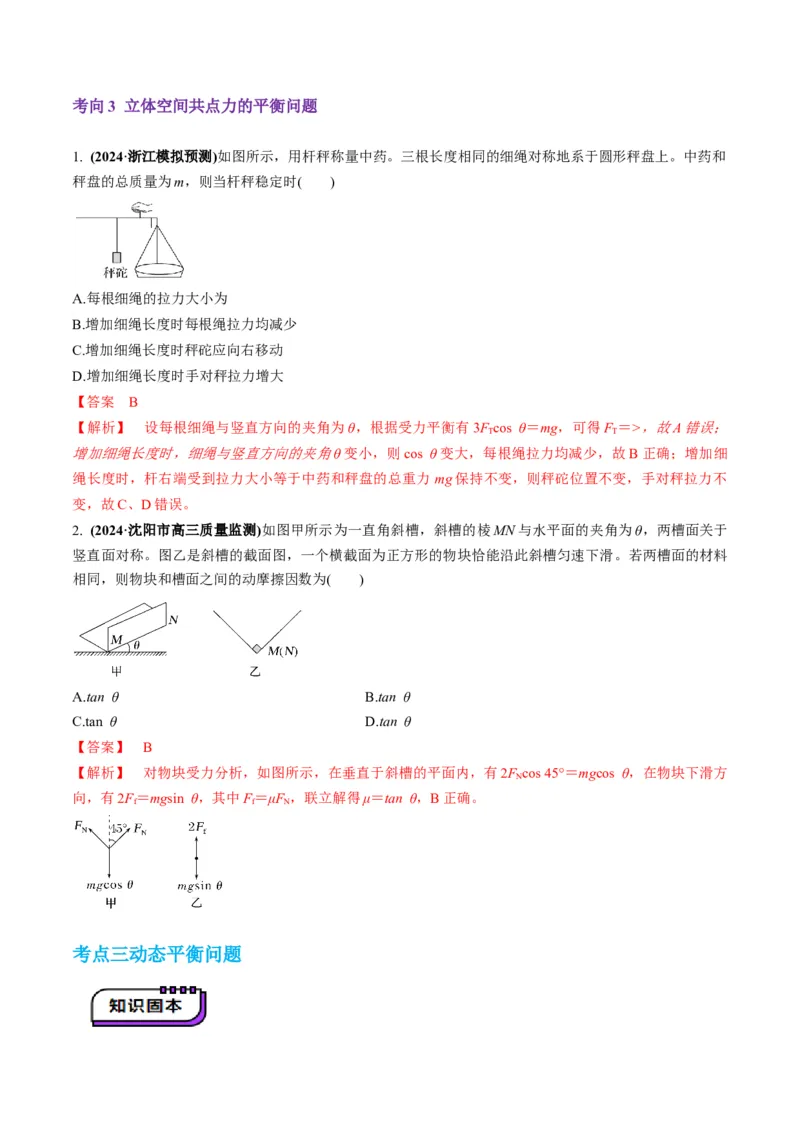
1. (2024·浙江模拟预测)如图所示,用杆秤称量中药。三根长度相同的细绳对称地系于圆形秤盘上。中药和
秤盘的总质量为m,则当杆秤稳定时( )
A.每根细绳的拉力大小为
B.增加细绳长度时每根绳拉力均减少
C.增加细绳长度时秤砣应向右移动
D.增加细绳长度时手对秤拉力增大
【答案 B
【解析】 设每根细绳与竖直方向的夹角为θ,根据受力平衡有3F cos θ=mg,可得F =>,故A错误;
T T
增加细绳长度时,细绳与竖直方向的夹角θ变小,则cos θ变大,每根绳拉力均减少,故B正确;增加细
绳长度时,杆右端受到拉力大小等于中药和秤盘的总重力 mg保持不变,则秤砣位置不变,手对秤拉力不
变,故C、D错误。
2. (2024·沈阳市高三质量监测)如图甲所示为一直角斜槽,斜槽的棱MN与水平面的夹角为θ,两槽面关于
竖直面对称。图乙是斜槽的截面图,一个横截面为正方形的物块恰能沿此斜槽匀速下滑。若两槽面的材料
相同,则物块和槽面之间的动摩擦因数为( )
A.tan θ B.tan θ
C.tan θ D.tan θ
【答案】 B
【解析】 对物块受力分析,如图所示,在垂直于斜槽的平面内,有2F cos 45°=mgcos θ,在物块下滑方
N
向,有2F=mgsin θ,其中F=μF ,联立解得μ=tan θ,B正确。
f f N
考点三动态平衡问题知识点1 动态平衡问题的常见类型
动态平衡是指物体的受力状态缓慢发生变化,但在变化过程中,每一个状态均可视为平衡状态。常用方法:
图解法、解析法、相似三角形法、辅助圆法、正弦定理法。
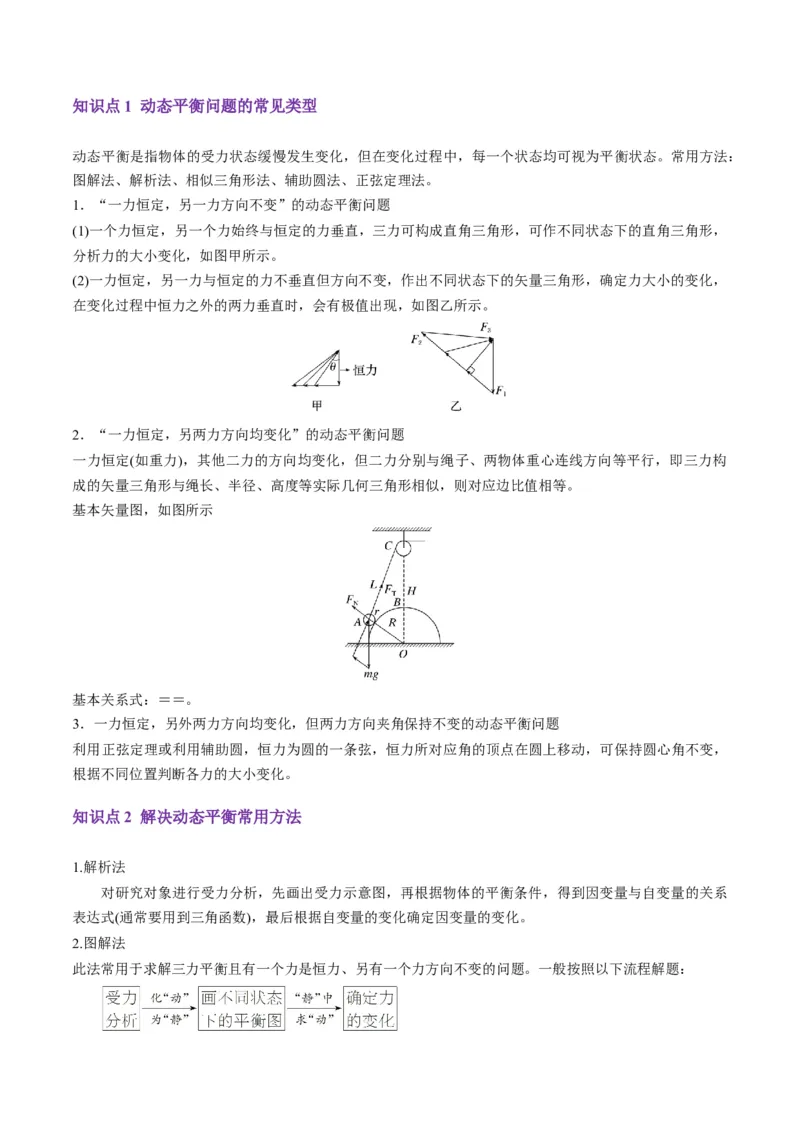
1.“一力恒定,另一力方向不变”的动态平衡问题
(1)一个力恒定,另一个力始终与恒定的力垂直,三力可构成直角三角形,可作不同状态下的直角三角形,
分析力的大小变化,如图甲所示。
(2)一力恒定,另一力与恒定的力不垂直但方向不变,作出不同状态下的矢量三角形,确定力大小的变化,
在变化过程中恒力之外的两力垂直时,会有极值出现,如图乙所示。
2.“一力恒定,另两力方向均变化”的动态平衡问题
一力恒定(如重力),其他二力的方向均变化,但二力分别与绳子、两物体重心连线方向等平行,即三力构
成的矢量三角形与绳长、半径、高度等实际几何三角形相似,则对应边比值相等。
基本矢量图,如图所示
基本关系式:==。
3.一力恒定,另外两力方向均变化,但两力方向夹角保持不变的动态平衡问题
利用正弦定理或利用辅助圆,恒力为圆的一条弦,恒力所对应角的顶点在圆上移动,可保持圆心角不变,
根据不同位置判断各力的大小变化。
知识点2 解决动态平衡常用方法
1.解析法
对研究对象进行受力分析,先画出受力示意图,再根据物体的平衡条件,得到因变量与自变量的关系
表达式(通常要用到三角函数),最后根据自变量的变化确定因变量的变化。
2.图解法
此法常用于求解三力平衡且有一个力是恒力、另有一个力方向不变的问题。一般按照以下流程解题:3.相似三角形法
在三力平衡问题中,如果有一个力是恒力,另外两个力方向都变化,且题目给出了空间几何关系,多
数情况下力的矢量三角形与空间几何三角形相似,可利用相似三角形对应边成比例进行计算。
4.做题流程
考向1 应用解析法解决动态平衡问题
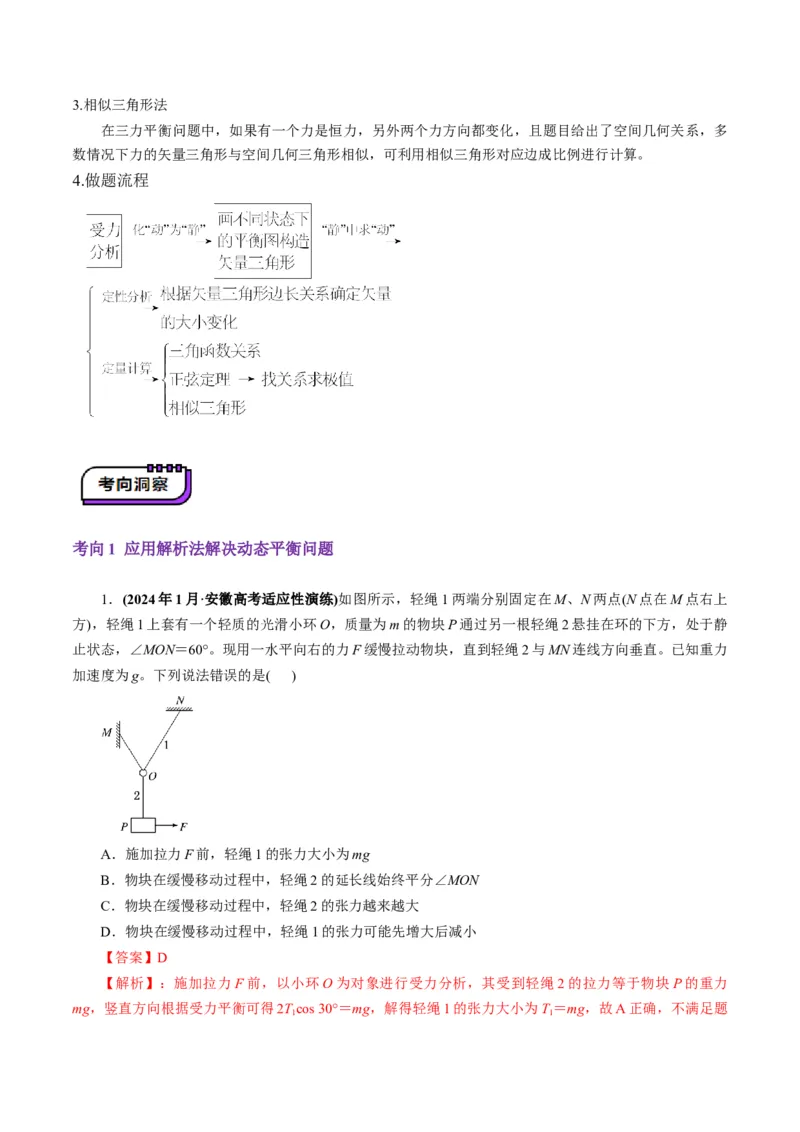
1.(2024年1月·安徽高考适应性演练)如图所示,轻绳1两端分别固定在M、N两点(N点在M点右上
方),轻绳1上套有一个轻质的光滑小环O,质量为m的物块P通过另一根轻绳2悬挂在环的下方,处于静
止状态,∠MON=60°。现用一水平向右的力F缓慢拉动物块,直到轻绳2与MN连线方向垂直。已知重力
加速度为g。下列说法错误的是( )
A.施加拉力F前,轻绳1的张力大小为mg
B.物块在缓慢移动过程中,轻绳2的延长线始终平分∠MON
C.物块在缓慢移动过程中,轻绳2的张力越来越大
D.物块在缓慢移动过程中,轻绳1的张力可能先增大后减小
【答案】D
【解析】:施加拉力F前,以小环O为对象进行受力分析,其受到轻绳2的拉力等于物块P的重力
mg,竖直方向根据受力平衡可得2Tcos 30°=mg,解得轻绳1的张力大小为T =mg,故A正确,不满足题
1 1意要求;物块在缓慢移动过程中,以小环O为对象,由于小环O两侧轻绳1的张力大小总是相等,则小环
O两侧轻绳1的张力合力沿∠MON平分线,根据受力平衡可知,轻绳2的延长线始终平分∠MON,故B正
确,不满足题意要求;物块在缓慢移动过程中,轻绳2与竖直方向的夹角θ逐渐增大,以物块为对象,根
据受力平衡可得Tcos θ=mg,可知T =,可知轻绳2的张力越来越大,故C正确,不满足题意要求;物
2 2
块在缓慢移动过程中,由于M、N之间的轻绳1长度不变,根据数学知识可知,小环O的运动轨迹为椭圆,
M、N为椭圆的两个焦点,当轻绳2与MN连线方向垂直时,小环O刚好位于椭圆的短轴顶点上,根据椭
圆知识可知此时∠MON最大,则此过程∠MON=α逐渐增大,以小环 O为对象,根据受力平衡可得
2T′cos =T,可得T′=,可知此过程轻绳1的张力一直增大,故D错误,满足题意要求。故选D。
1 2 1
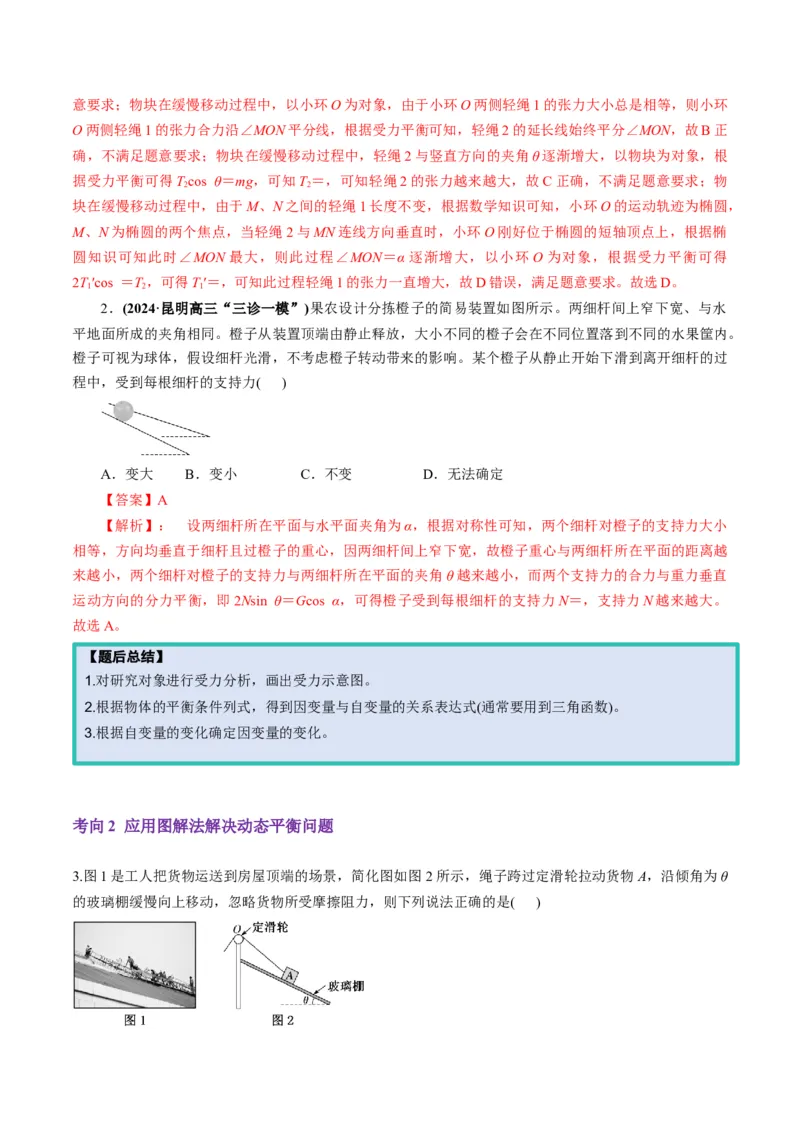
2.(2024·昆明高三“三诊一模”)果农设计分拣橙子的简易装置如图所示。两细杆间上窄下宽、与水
平地面所成的夹角相同。橙子从装置顶端由静止释放,大小不同的橙子会在不同位置落到不同的水果筐内。
橙子可视为球体,假设细杆光滑,不考虑橙子转动带来的影响。某个橙子从静止开始下滑到离开细杆的过
程中,受到每根细杆的支持力( )
A.变大 B.变小 C.不变 D.无法确定
【答案】A
【解析】: 设两细杆所在平面与水平面夹角为α,根据对称性可知,两个细杆对橙子的支持力大小
相等,方向均垂直于细杆且过橙子的重心,因两细杆间上窄下宽,故橙子重心与两细杆所在平面的距离越
来越小,两个细杆对橙子的支持力与两细杆所在平面的夹角θ越来越小,而两个支持力的合力与重力垂直
运动方向的分力平衡,即2Nsin θ=Gcos α,可得橙子受到每根细杆的支持力N=,支持力N越来越大。
故选A。
【题后总结】
1.对研究对象进行受力分析,画出受力示意图。
2.根据物体的平衡条件列式,得到因变量与自变量的关系表达式(通常要用到三角函数)。
3.根据自变量的变化确定因变量的变化。
考向2 应用图解法解决动态平衡问题
3.图1是工人把货物运送到房屋顶端的场景,简化图如图 2所示,绳子跨过定滑轮拉动货物A,沿倾角为θ
的玻璃棚缓慢向上移动,忽略货物所受摩擦阻力,则下列说法正确的是( )A.货物A对玻璃棚的压力不变
B.货物A对玻璃棚的压力越来越大
C.绳子的拉力越来越大
D.绳子的拉力越来越小
【答案】C
【解析】 对货物A受力分析,其动态图如图所示。
货物缓慢向上移动,则拉力方向与竖直方向的夹角减小,由图可知,绳子的拉力越来越大。同时,玻璃棚
对货物的支持力变小,由牛顿第三定律知,货物A对玻璃棚的压力越来越小。故C项正确。
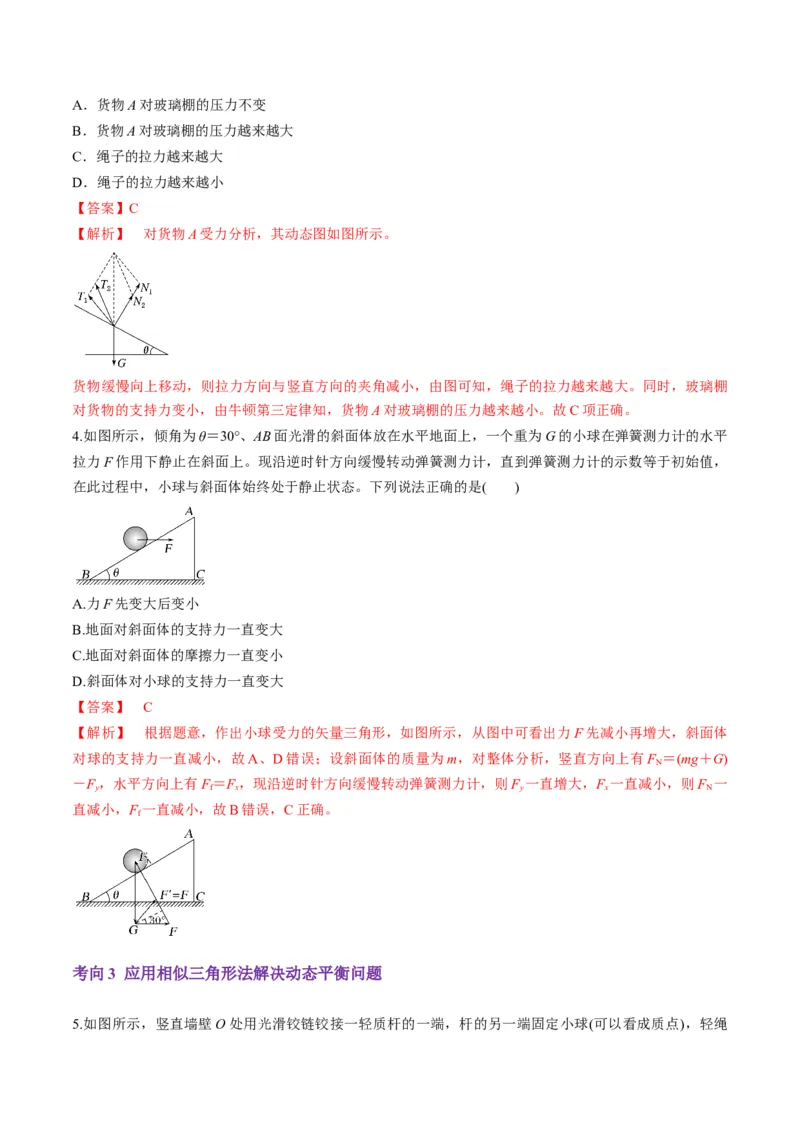
4.如图所示,倾角为θ=30°、AB面光滑的斜面体放在水平地面上,一个重为G的小球在弹簧测力计的水平
拉力F作用下静止在斜面上。现沿逆时针方向缓慢转动弹簧测力计,直到弹簧测力计的示数等于初始值,
在此过程中,小球与斜面体始终处于静止状态。下列说法正确的是( )
A.力F先变大后变小
B.地面对斜面体的支持力一直变大
C.地面对斜面体的摩擦力一直变小
D.斜面体对小球的支持力一直变大
【答案】 C
【解析】 根据题意,作出小球受力的矢量三角形,如图所示,从图中可看出力F先减小再增大,斜面体
对球的支持力一直减小,故A、D错误;设斜面体的质量为m,对整体分析,竖直方向上有F =(mg+G)
N
-F,水平方向上有F=F,现沿逆时针方向缓慢转动弹簧测力计,则F 一直增大,F 一直减小,则F 一
y f x y x N
直减小,F 一直减小,故B错误,C正确。
f
考向3 应用相似三角形法解决动态平衡问题
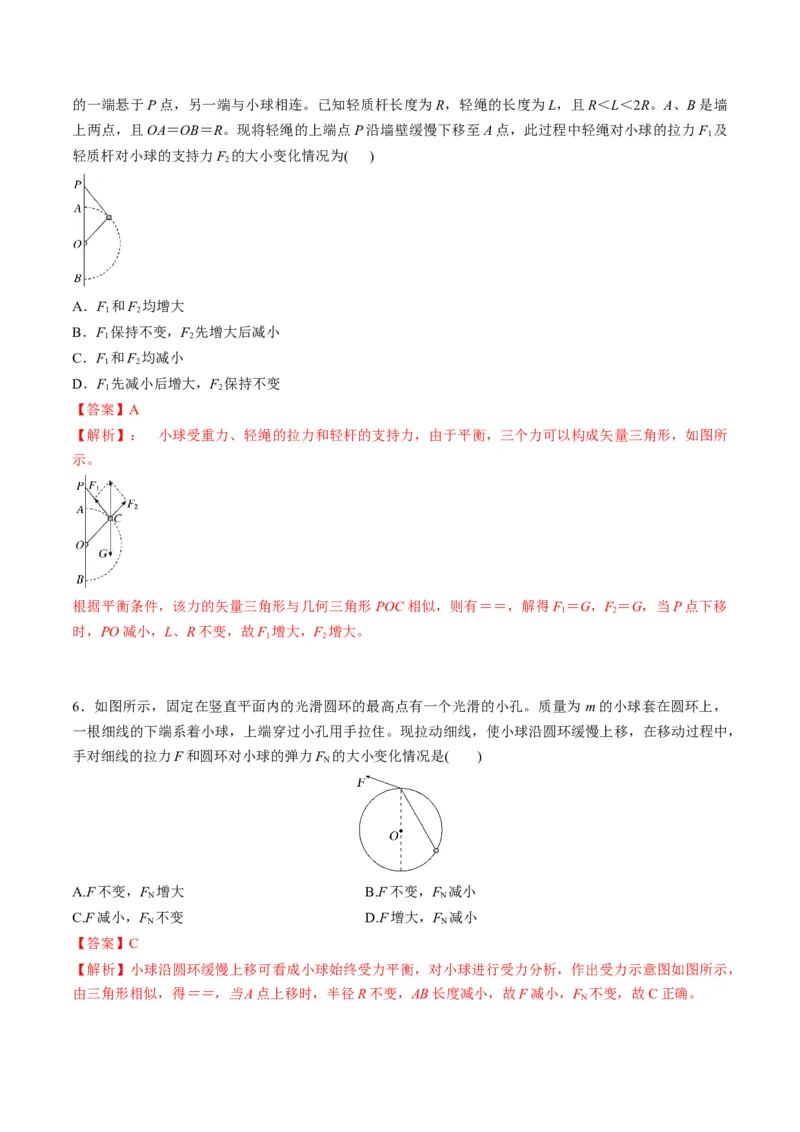
5.如图所示,竖直墙壁O处用光滑铰链铰接一轻质杆的一端,杆的另一端固定小球(可以看成质点),轻绳的一端悬于P点,另一端与小球相连。已知轻质杆长度为R,轻绳的长度为L,且R<L<2R。A、B是墙
上两点,且OA=OB=R。现将轻绳的上端点P沿墙壁缓慢下移至A点,此过程中轻绳对小球的拉力F 及
1
轻质杆对小球的支持力F 的大小变化情况为( )
2
A.F 和F 均增大
1 2
B.F 保持不变,F 先增大后减小
1 2
C.F 和F 均减小
1 2
D.F 先减小后增大,F 保持不变
1 2
【答案】A
【解析】: 小球受重力、轻绳的拉力和轻杆的支持力,由于平衡,三个力可以构成矢量三角形,如图所
示。
根据平衡条件,该力的矢量三角形与几何三角形 POC相似,则有==,解得F =G,F =G,当P点下移
1 2
时,PO减小,L、R不变,故F 增大,F 增大。
1 2
6.如图所示,固定在竖直平面内的光滑圆环的最高点有一个光滑的小孔。质量为 m的小球套在圆环上,
一根细线的下端系着小球,上端穿过小孔用手拉住。现拉动细线,使小球沿圆环缓慢上移,在移动过程中,
手对细线的拉力F和圆环对小球的弹力F 的大小变化情况是( )
N
A.F不变,F 增大 B.F不变,F 减小
N N
C.F减小,F 不变 D.F增大,F 减小
N N
【答案】C
【解析】小球沿圆环缓慢上移可看成小球始终受力平衡,对小球进行受力分析,作出受力示意图如图所示,
由三角形相似,得==,当A点上移时,半径R不变,AB长度减小,故F减小,F 不变,故C正确。
N考向4 应用矢量圆法(正弦定理法)解决动态平衡问题
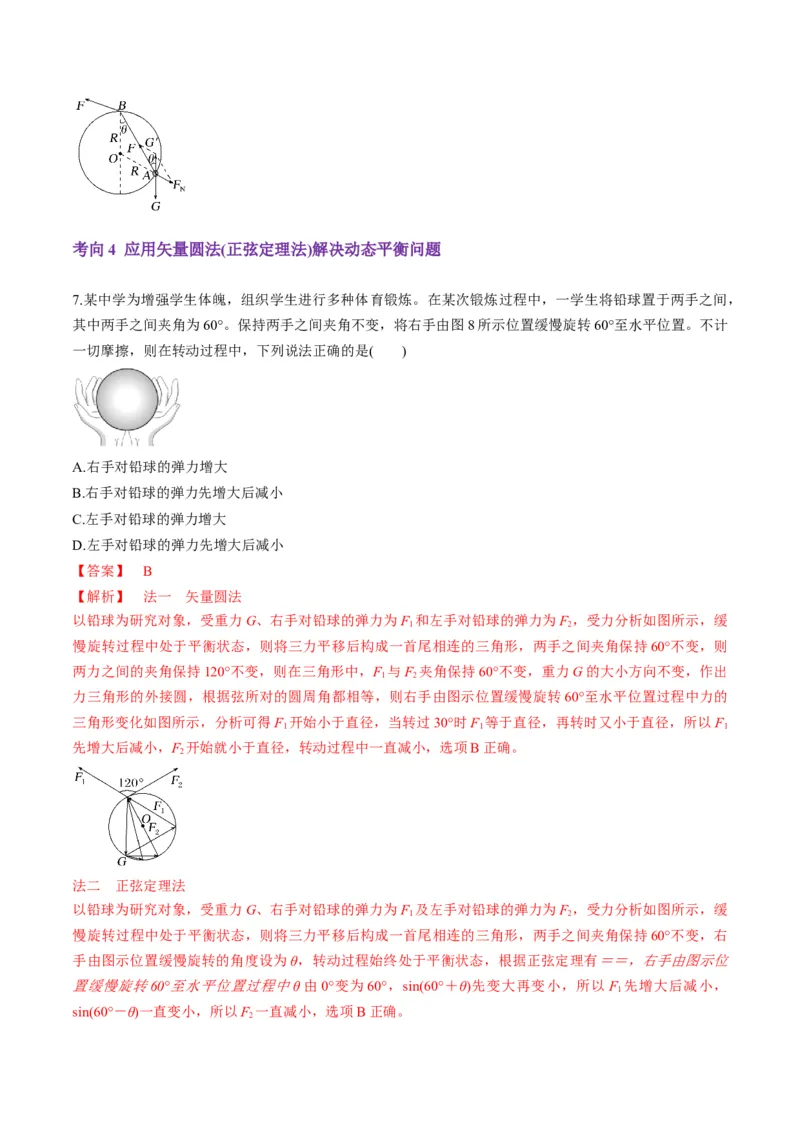
7.某中学为增强学生体魄,组织学生进行多种体育锻炼。在某次锻炼过程中,一学生将铅球置于两手之间,
其中两手之间夹角为60°。保持两手之间夹角不变,将右手由图8所示位置缓慢旋转60°至水平位置。不计
一切摩擦,则在转动过程中,下列说法正确的是( )
A.右手对铅球的弹力增大
B.右手对铅球的弹力先增大后减小
C.左手对铅球的弹力增大
D.左手对铅球的弹力先增大后减小
【答案】 B
【解析】 法一 矢量圆法
以铅球为研究对象,受重力G、右手对铅球的弹力为F 和左手对铅球的弹力为F ,受力分析如图所示,缓
1 2
慢旋转过程中处于平衡状态,则将三力平移后构成一首尾相连的三角形,两手之间夹角保持60°不变,则
两力之间的夹角保持120°不变,则在三角形中,F 与F 夹角保持60°不变,重力G的大小方向不变,作出
1 2
力三角形的外接圆,根据弦所对的圆周角都相等,则右手由图示位置缓慢旋转60°至水平位置过程中力的
三角形变化如图所示,分析可得F 开始小于直径,当转过30°时F 等于直径,再转时又小于直径,所以F
1 1 1
先增大后减小,F 开始就小于直径,转动过程中一直减小,选项B正确。
2
法二 正弦定理法
以铅球为研究对象,受重力G、右手对铅球的弹力为F 及左手对铅球的弹力为F ,受力分析如图所示,缓
1 2
慢旋转过程中处于平衡状态,则将三力平移后构成一首尾相连的三角形,两手之间夹角保持60°不变,右
手由图示位置缓慢旋转的角度设为θ,转动过程始终处于平衡状态,根据正弦定理有==,右手由图示位
置缓慢旋转60°至水平位置过程中θ由0°变为60°,sin(60°+θ)先变大再变小,所以F 先增大后减小,
1
sin(60°-θ)一直变小,所以F 一直减小,选项B正确。
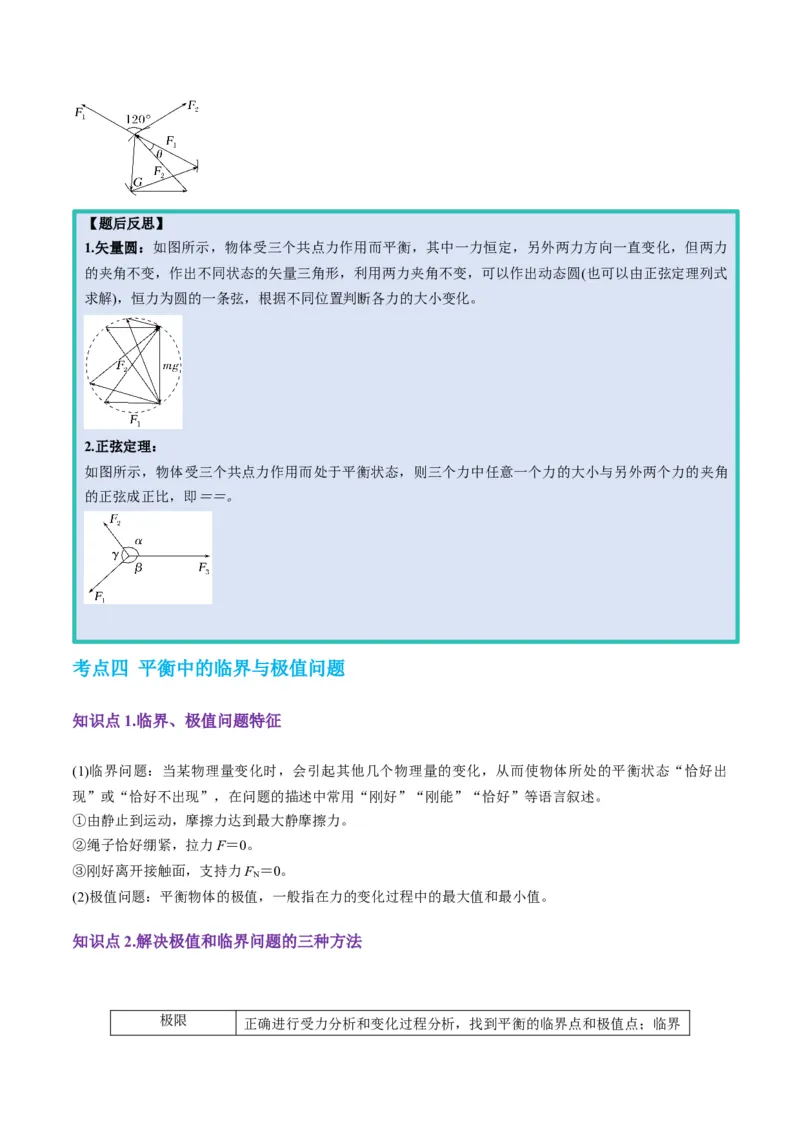
2【题后反思】
1.矢量圆:如图所示,物体受三个共点力作用而平衡,其中一力恒定,另外两力方向一直变化,但两力
的夹角不变,作出不同状态的矢量三角形,利用两力夹角不变,可以作出动态圆(也可以由正弦定理列式
求解),恒力为圆的一条弦,根据不同位置判断各力的大小变化。
2.正弦定理:
如图所示,物体受三个共点力作用而处于平衡状态,则三个力中任意一个力的大小与另外两个力的夹角
的正弦成正比,即==。
考点四 平衡中的临界与极值问题
知识点1.临界、极值问题特征
(1)临界问题:当某物理量变化时,会引起其他几个物理量的变化,从而使物体所处的平衡状态“恰好出
现”或“恰好不出现”,在问题的描述中常用“刚好”“刚能”“恰好”等语言叙述。
①由静止到运动,摩擦力达到最大静摩擦力。
②绳子恰好绷紧,拉力F=0。
③刚好离开接触面,支持力F =0。
N
(2)极值问题:平衡物体的极值,一般指在力的变化过程中的最大值和最小值。
知识点2.解决极值和临界问题的三种方法
极限 正确进行受力分析和变化过程分析,找到平衡的临界点和极值点;临界条件必须在变化中寻找,不能在一个状态上研究临界问题,要把某个物
法
理量推向极大或极小
数学 通过对问题的分析,根据平衡条件列出物理量之间的函数关系(画出函
分析 数图像),用数学方法求极值(如求二次函数极值、公式极值、三角函数
法 极值)
物理分析 根据平衡条件,作出力的矢量图,通过对物理过程的分析,利用平行四
法 边形定则进行动态分析,确定最大值和最小值
考向1 应用物理分析法解决平衡中的临界极值问题
根据平衡条件作出力的矢量图,若只受三个力,则这三个力能构成封闭矢量三角形,然后根据矢量图
进行动态分析,确定最大值和最小值。
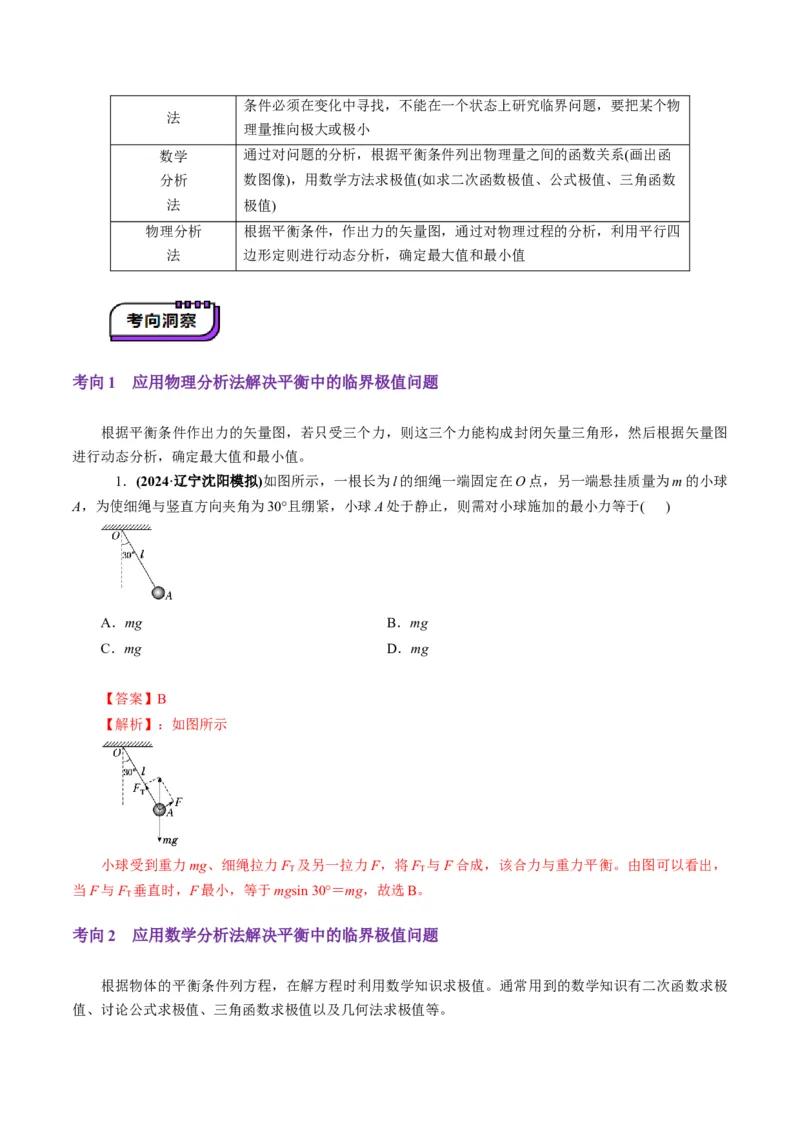
1.(2024·辽宁沈阳模拟)如图所示,一根长为l的细绳一端固定在O点,另一端悬挂质量为m的小球
A,为使细绳与竖直方向夹角为30°且绷紧,小球A处于静止,则需对小球施加的最小力等于( )
A.mg B.mg
C.mg D.mg
【答案】B
【解析】:如图所示
小球受到重力mg、细绳拉力F 及另一拉力F,将F 与F合成,该合力与重力平衡。由图可以看出,
T T
当F与F 垂直时,F最小,等于mgsin 30°=mg,故选B。
T
考向2 应用数学分析法解决平衡中的临界极值问题
根据物体的平衡条件列方程,在解方程时利用数学知识求极值。通常用到的数学知识有二次函数求极
值、讨论公式求极值、三角函数求极值以及几何法求极值等。2.(2022·浙江1月选考)如图所示,学校门口水平地面上有一质量为m的石墩,石墩与水平地面间的动摩
擦因数为μ,工作人员用轻绳按图示方式匀速移动石墩时,两平行轻绳与水平面间的夹角均为θ,则下列说
法正确的是( )
A.轻绳的合拉力大小为
B.轻绳的合拉力大小为
C.减小夹角θ,轻绳的合拉力一定减小
D.轻绳的合拉力最小时,地面对石墩的摩擦力也最小
【答案】B
【解析】:设轻绳的合拉力为T,地面对石墩的支持力为N,对石墩受力分析,由平衡条件可知 Tcos θ=
f,f=μN,Tsin θ+N=mg,联立解得T=,A错误,B正确;轻绳的合拉力大小为T==,可知当θ+φ=
90°时,轻绳的合拉力有最小值,即减小夹角θ,轻绳的合拉力不一定减小,C错误;摩擦力大小为f=Tcos
θ==,可知增大夹角θ,摩擦力一直减小,当θ趋近于90°时,摩擦力最小,故轻绳的合拉力最小时,地
面对石墩的摩擦力不是最小,D错误。
考向3 应用极限分析法解决平衡中的临界极值问题
首先要正确地进行受力分析和变化过程分析,找出平衡的临界点和极值点;临界条件必须在变化中去
寻找,不能停留在一个状态来研究临界问题,而要把某个物理量推向极端,即极大和极小。
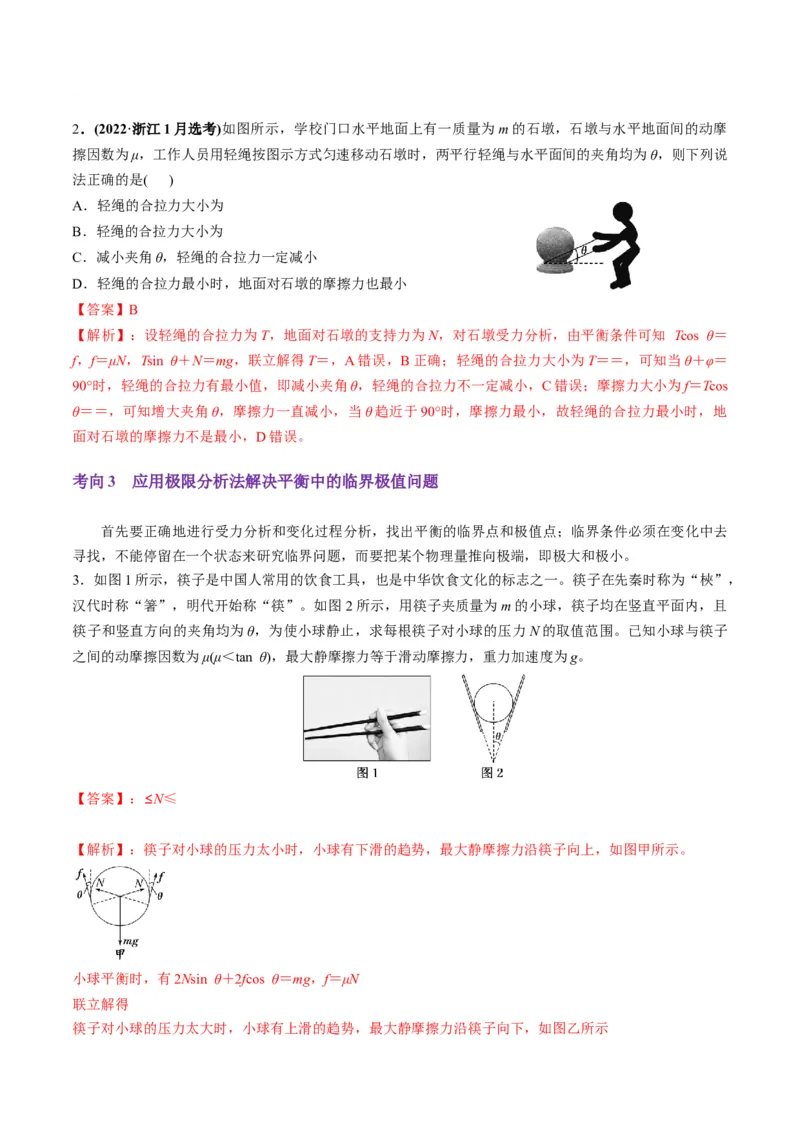
3.如图1所示,筷子是中国人常用的饮食工具,也是中华饮食文化的标志之一。筷子在先秦时称为“梜”,
汉代时称“箸”,明代开始称“筷”。如图 2所示,用筷子夹质量为m的小球,筷子均在竖直平面内,且
筷子和竖直方向的夹角均为θ,为使小球静止,求每根筷子对小球的压力N的取值范围。已知小球与筷子
之间的动摩擦因数为μ(μ<tan θ),最大静摩擦力等于滑动摩擦力,重力加速度为g。
【答案】:≤N≤
【解析】:筷子对小球的压力太小时,小球有下滑的趋势,最大静摩擦力沿筷子向上,如图甲所示。
小球平衡时,有2Nsin θ+2fcos θ=mg,f=μN
联立解得
筷子对小球的压力太大时,小球有上滑的趋势,最大静摩擦力沿筷子向下,如图乙所示小球平衡时,有2N′sin θ=mg+2f′cos θ,f′=μN′
联立解得N′=
综上,筷子对小球的压力的取值范围为:
≤N≤。
1.(2024·山东·高考真题)如图所示,国产人形机器人“天工”能平稳通过斜坡。若它可以在倾角不大于
30°的斜坡上稳定地站立和行走,且最大静摩擦力等于滑动摩擦力,则它的脚和斜面间的动摩擦因数不能小
于( )
A. B. C. D.
【答案】B
【详解】根据题意可知机器人“天工”它可以在倾角不大于30°的斜坡上稳定地站立和行走,对“天工”
分析有
可得
故选B。
2.(2024·湖北·高考真题)如图所示,两拖船P、Q拉着无动力货船S一起在静水中沿图中虚线方向匀速
前进,两根水平缆绳与虚线的夹角均保持为30°。假设水对三艘船在水平方向的作用力大小均为f,方向与
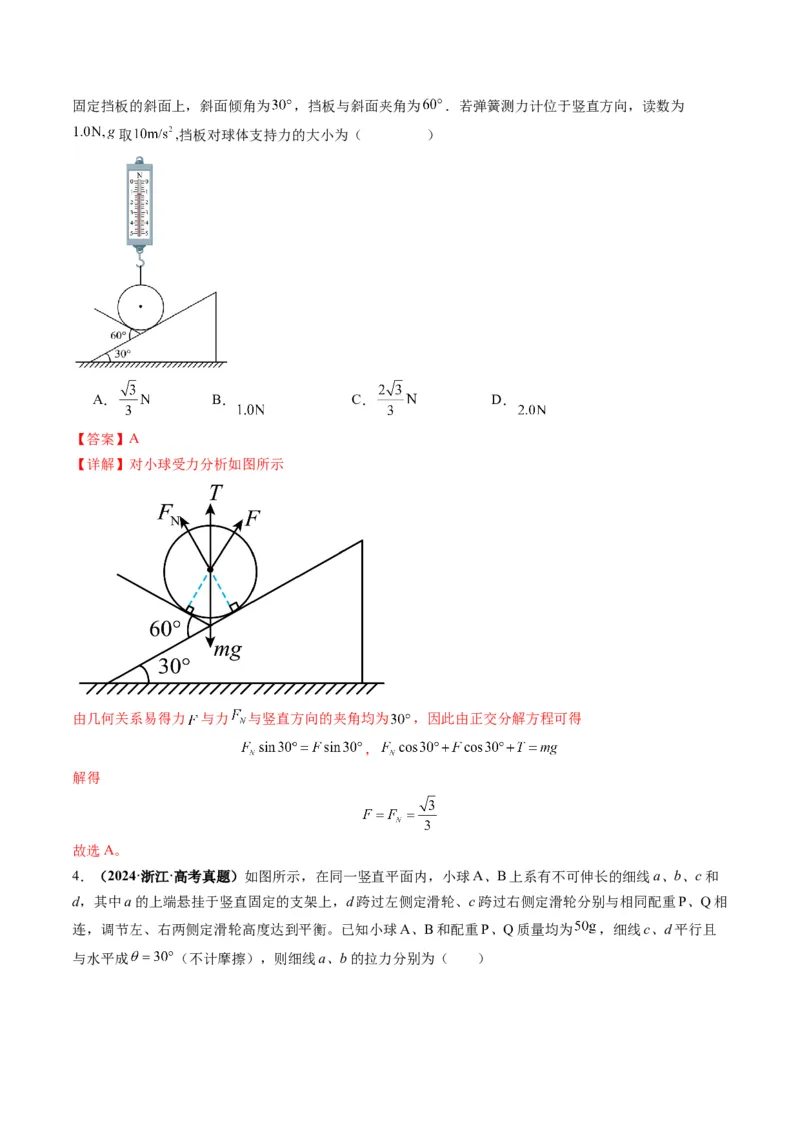
船的运动方向相反,则每艘拖船发动机提供的动力大小为( )A. B. C.2f D.3f
【答案】B
【详解】根据题意对S受力分析如图
正交分解可知
所以有
对P受力分析如图
则有
解得
故选B。
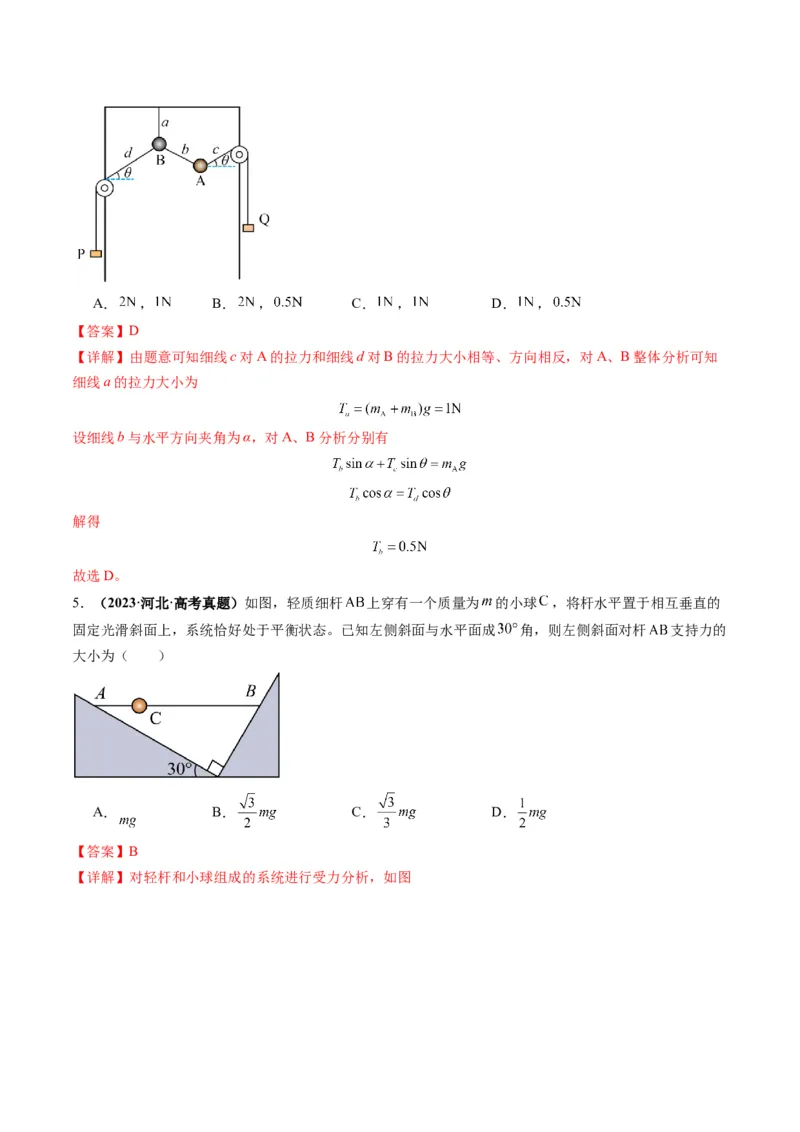
3.(2024·河北·高考真题)如图,弹簧测力计下端挂有一质量为 的光滑均匀球体,球体静止于带有固定挡板的斜面上,斜面倾角为 ,挡板与斜面夹角为 .若弹簧测力计位于竖直方向,读数为
取 ,挡板对球体支持力的大小为( )
A. B. C. D.
【答案】A
【详解】对小球受力分析如图所示
由几何关系易得力 与力 与竖直方向的夹角均为 ,因此由正交分解方程可得
,
解得
故选A。
4.(2024·浙江·高考真题)如图所示,在同一竖直平面内,小球A、B上系有不可伸长的细线a、b、c和
d,其中a的上端悬挂于竖直固定的支架上,d跨过左侧定滑轮、c跨过右侧定滑轮分别与相同配重P、Q相
连,调节左、右两侧定滑轮高度达到平衡。已知小球A、B和配重P、Q质量均为 ,细线c、d平行且
与水平成 (不计摩擦),则细线a、b的拉力分别为( )A. , B. , C. , D. ,
【答案】D
【详解】由题意可知细线c对A的拉力和细线d对B的拉力大小相等、方向相反,对A、B整体分析可知
细线a的拉力大小为
设细线b与水平方向夹角为α,对A、B分析分别有
解得
故选D。
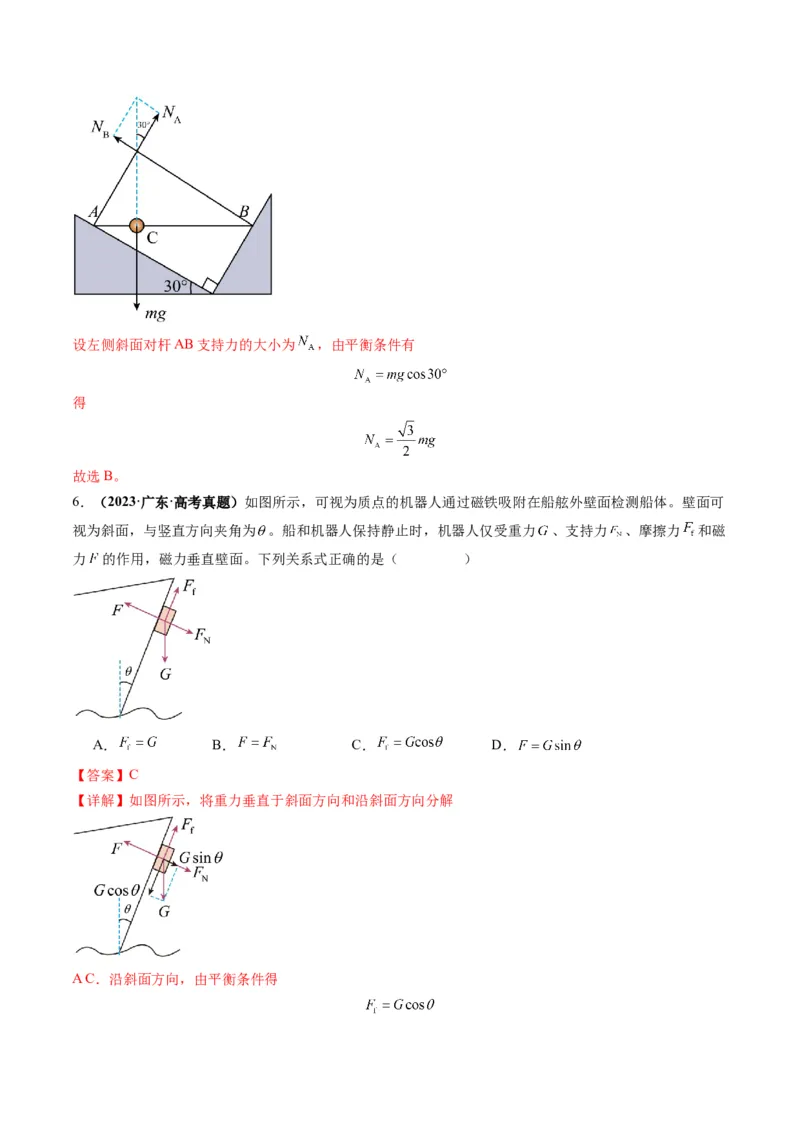
5.(2023·河北·高考真题)如图,轻质细杆 上穿有一个质量为 的小球 ,将杆水平置于相互垂直的
固定光滑斜面上,系统恰好处于平衡状态。已知左侧斜面与水平面成 角,则左侧斜面对杆 支持力的
大小为( )
A. B. C. D.
【答案】B
【详解】对轻杆和小球组成的系统进行受力分析,如图设左侧斜面对杆AB支持力的大小为 ,由平衡条件有
得
故选B。
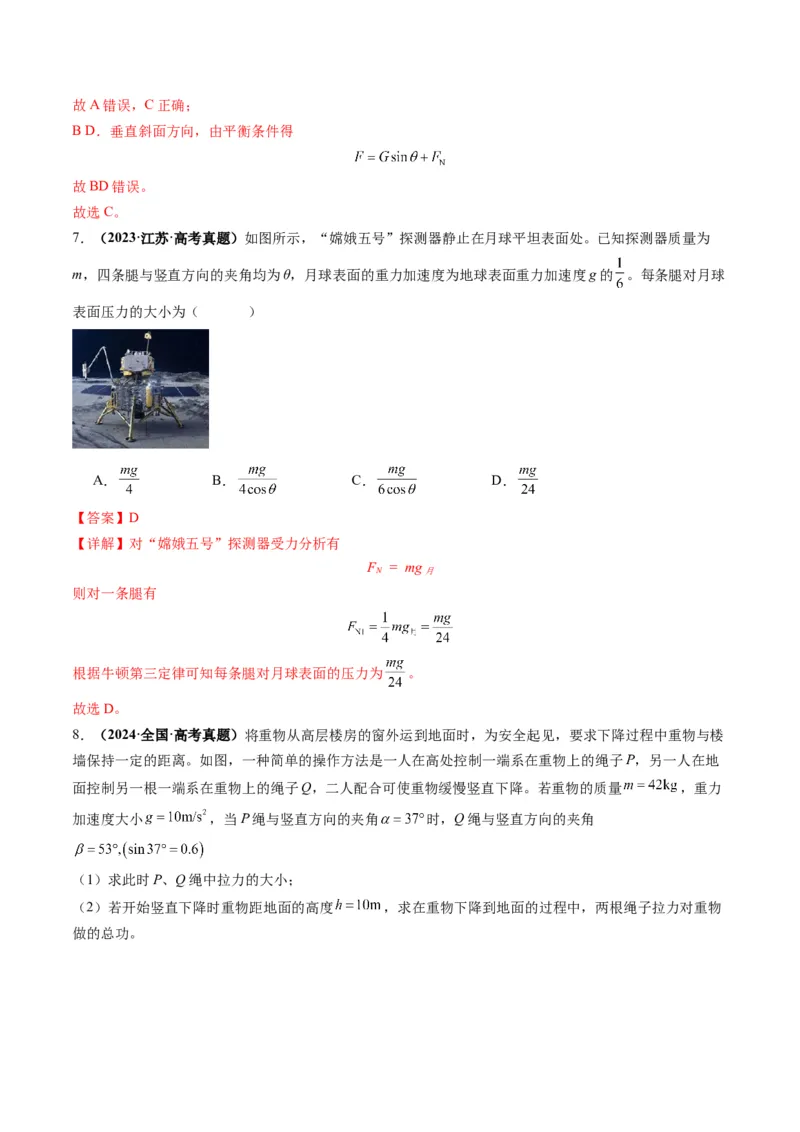
6.(2023·广东·高考真题)如图所示,可视为质点的机器人通过磁铁吸附在船舷外壁面检测船体。壁面可
视为斜面,与竖直方向夹角为 。船和机器人保持静止时,机器人仅受重力 、支持力 、摩擦力 和磁
力 的作用,磁力垂直壁面。下列关系式正确的是( )
A. B. C. D.
【答案】C
【详解】如图所示,将重力垂直于斜面方向和沿斜面方向分解
A C.沿斜面方向,由平衡条件得故A错误,C正确;
B D.垂直斜面方向,由平衡条件得
故BD错误。
故选C。
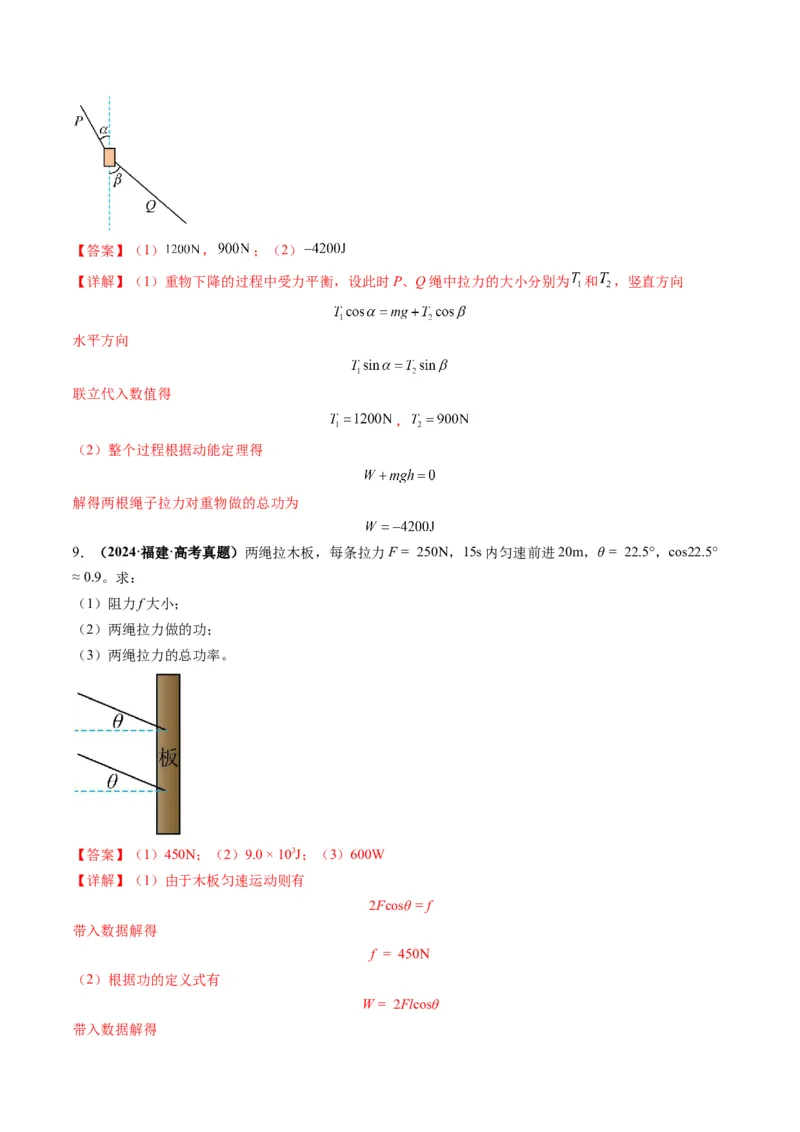
7.(2023·江苏·高考真题)如图所示,“嫦娥五号”探测器静止在月球平坦表面处。已知探测器质量为
m,四条腿与竖直方向的夹角均为θ,月球表面的重力加速度为地球表面重力加速度g的 。每条腿对月球
表面压力的大小为( )
A. B. C. D.
【答案】D
【详解】对“嫦娥五号”探测器受力分析有
F = mg
N 月
则对一条腿有
根据牛顿第三定律可知每条腿对月球表面的压力为 。
故选D。
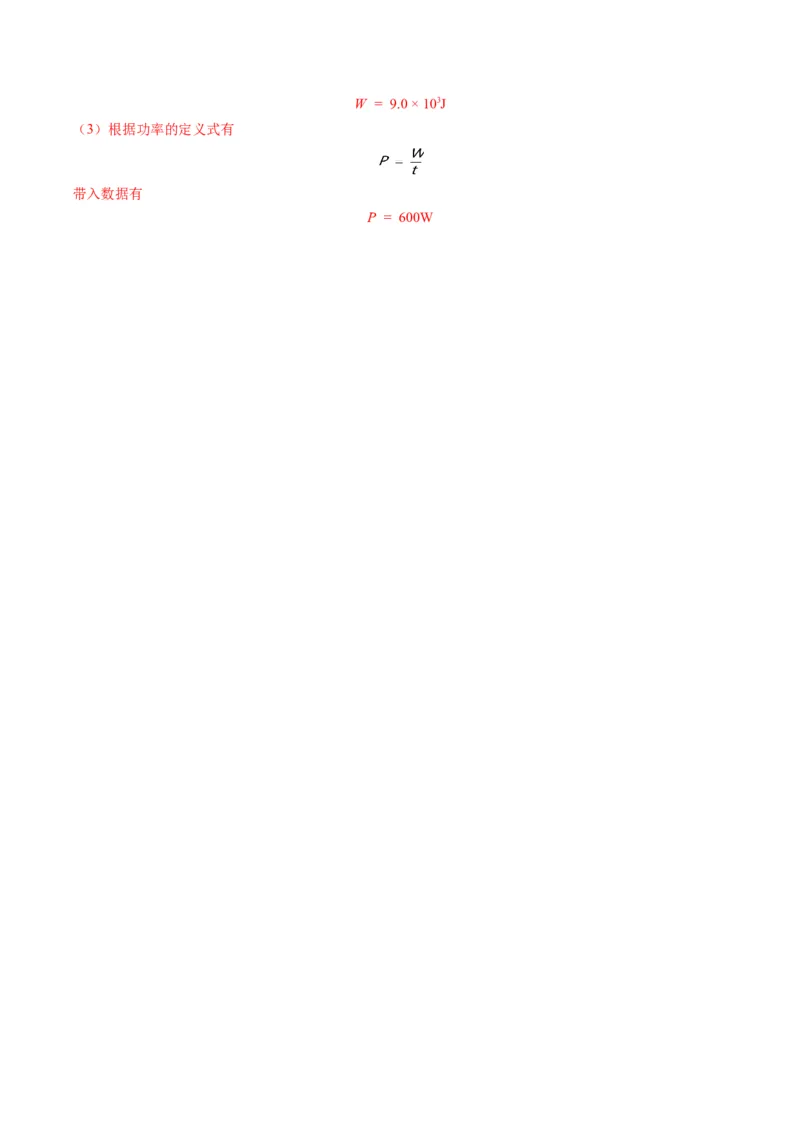
8.(2024·全国·高考真题)将重物从高层楼房的窗外运到地面时,为安全起见,要求下降过程中重物与楼
墙保持一定的距离。如图,一种简单的操作方法是一人在高处控制一端系在重物上的绳子P,另一人在地
面控制另一根一端系在重物上的绳子Q,二人配合可使重物缓慢竖直下降。若重物的质量 ,重力
加速度大小 ,当P绳与竖直方向的夹角 时,Q绳与竖直方向的夹角
(1)求此时P、Q绳中拉力的大小;
(2)若开始竖直下降时重物距地面的高度 ,求在重物下降到地面的过程中,两根绳子拉力对重物
做的总功。【答案】(1) , ;(2)
【详解】(1)重物下降的过程中受力平衡,设此时P、Q绳中拉力的大小分别为 和 ,竖直方向
水平方向
联立代入数值得
,
(2)整个过程根据动能定理得
解得两根绳子拉力对重物做的总功为
9.(2024·福建·高考真题)两绳拉木板,每条拉力F = 250N,15s内匀速前进20m,θ = 22.5°,cos22.5°
≈ 0.9。求:
(1)阻力f大小;
(2)两绳拉力做的功;
(3)两绳拉力的总功率。
【答案】(1)450N;(2)9.0 × 103J;(3)600W
【详解】(1)由于木板匀速运动则有
2Fcosθ = f
带入数据解得
f = 450N
(2)根据功的定义式有
W = 2Flcosθ
带入数据解得W = 9.0 × 103J
(3)根据功率的定义式有
带入数据有
P = 600W
