
文档内容
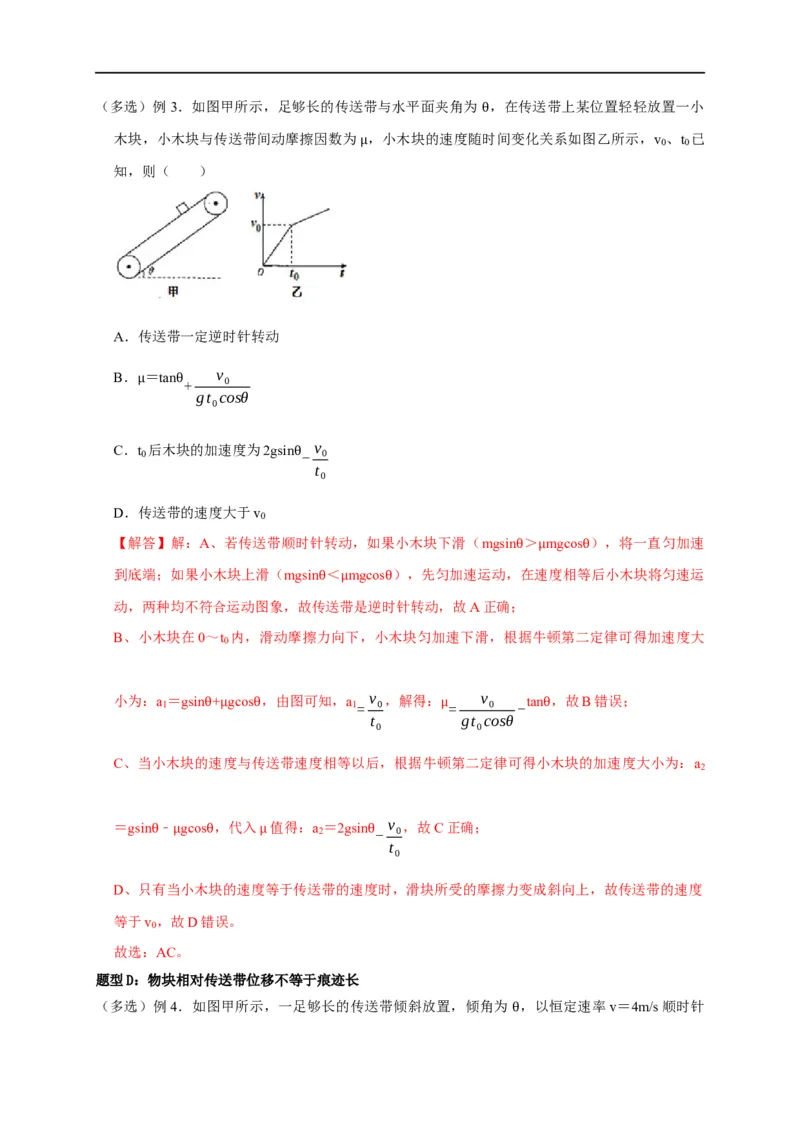
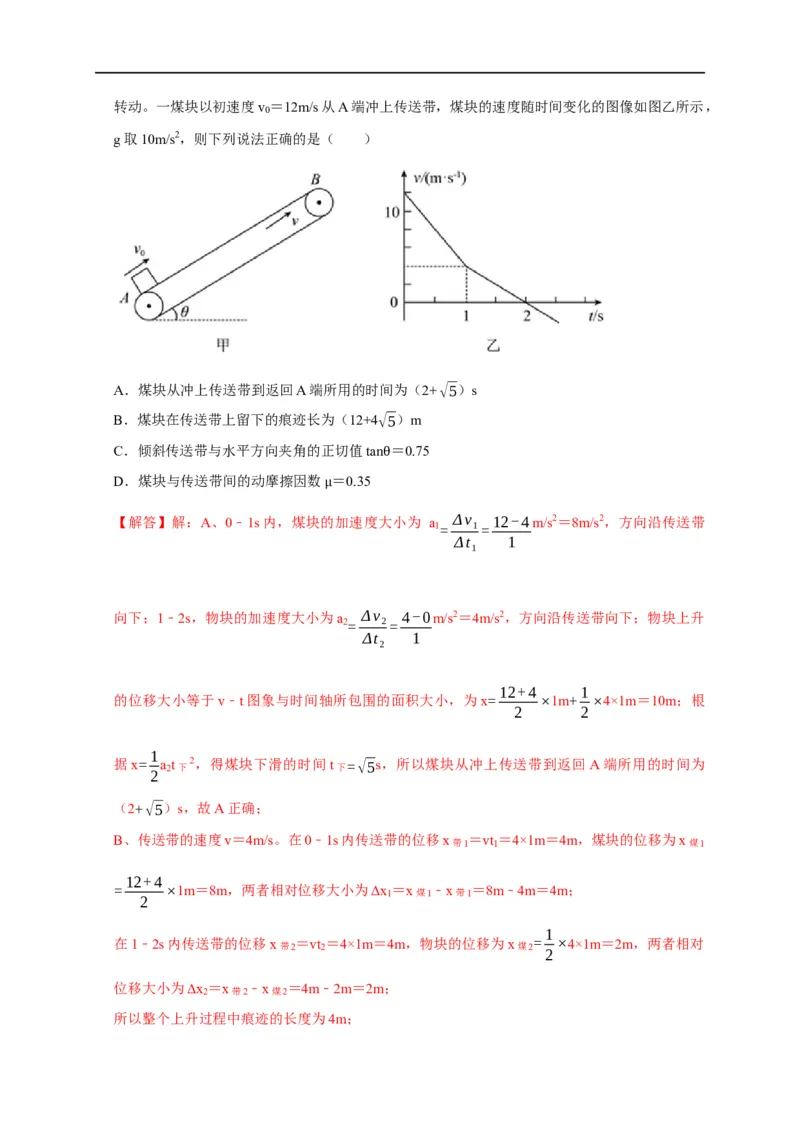
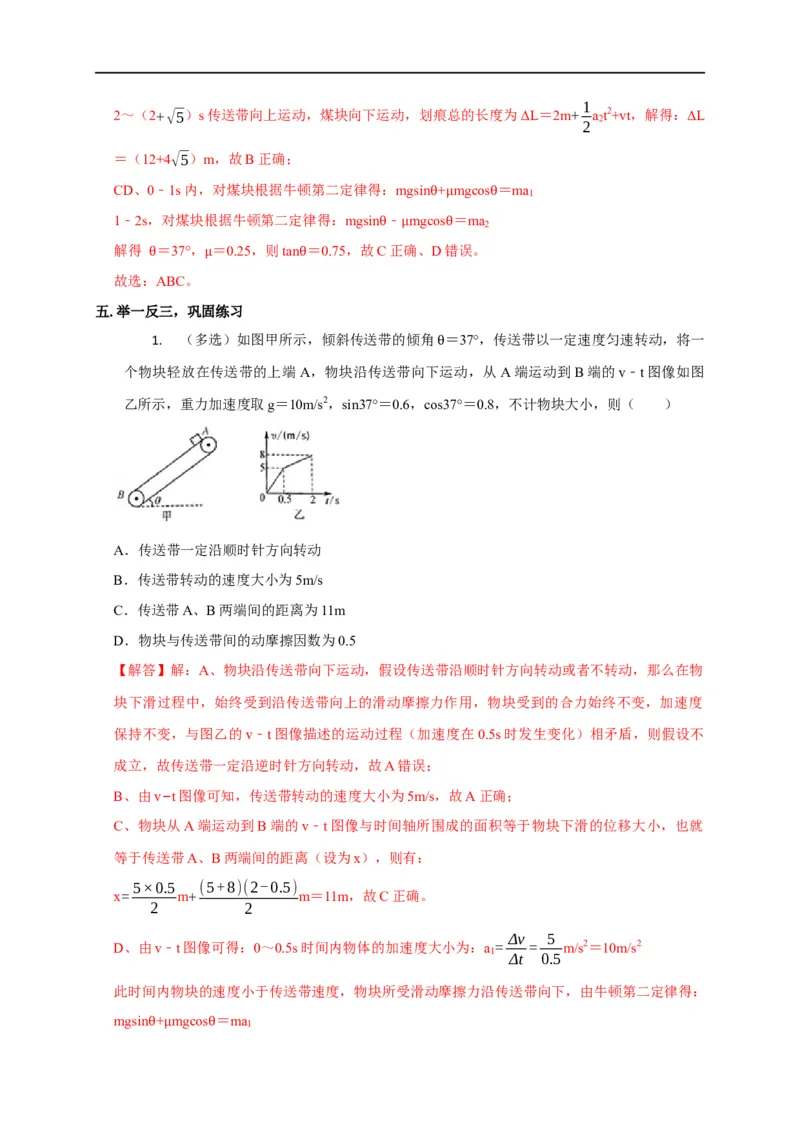
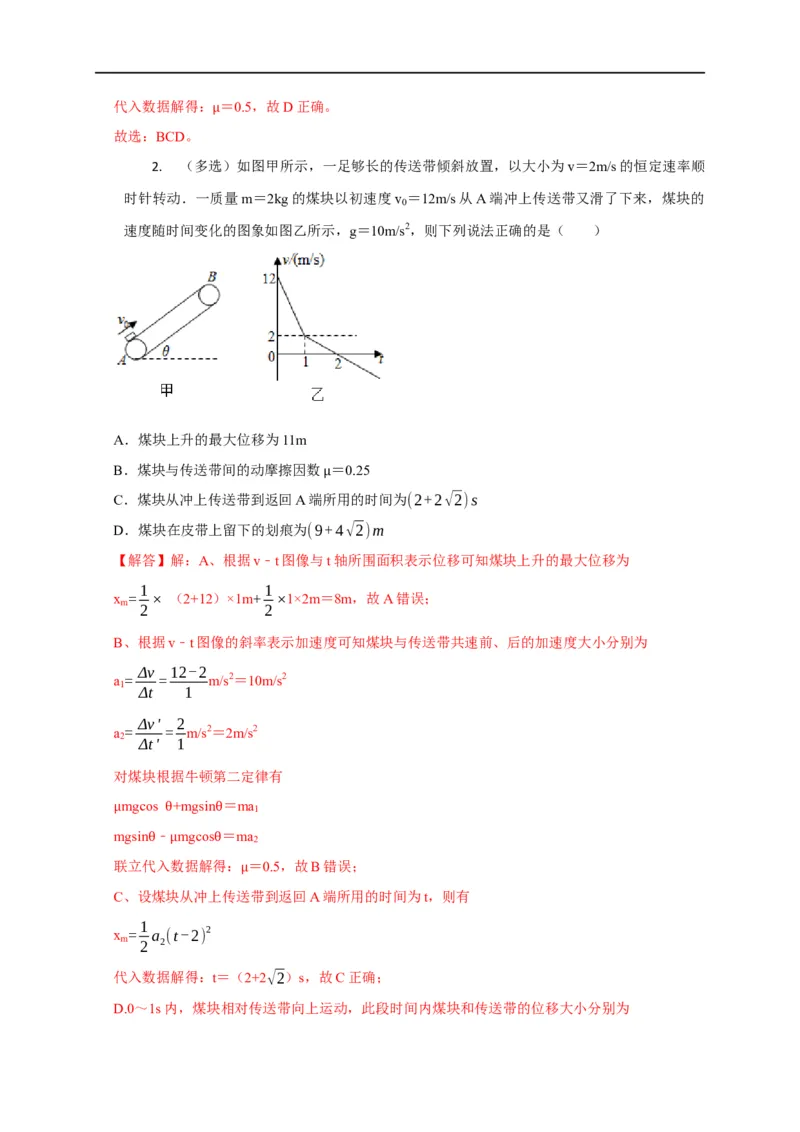
第 10 讲 传送带模型
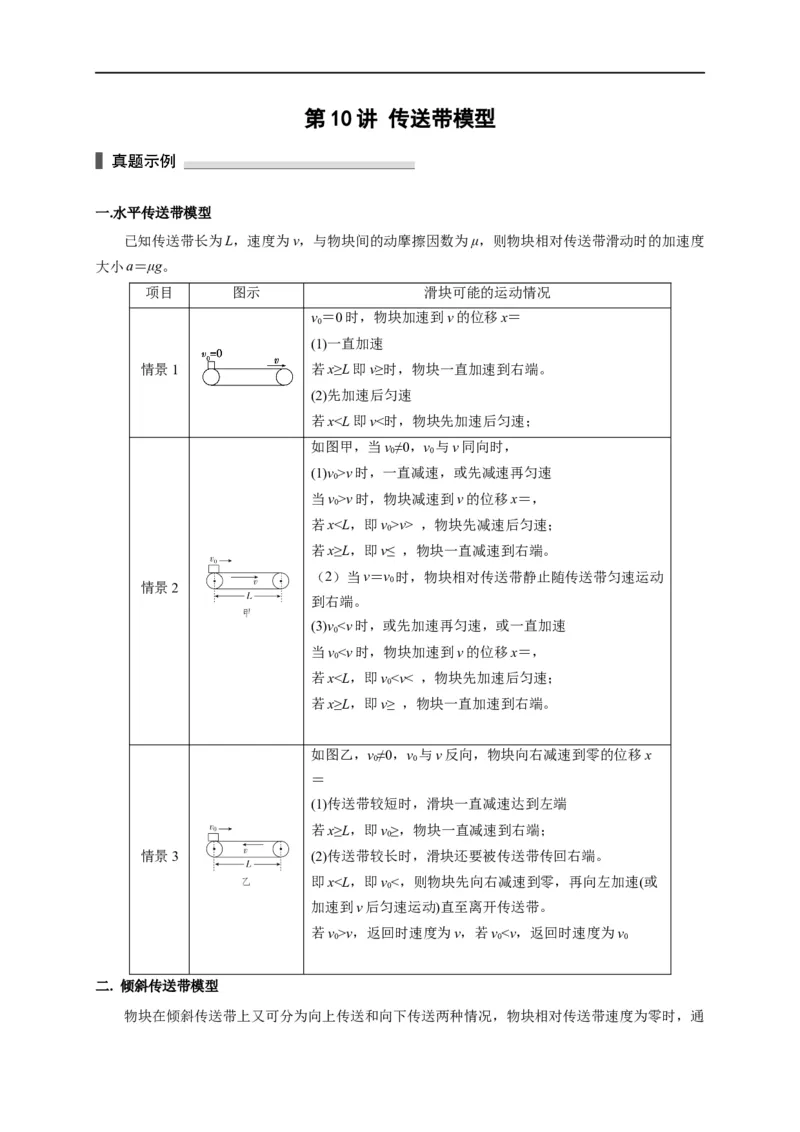
一.水平传送带模型
已知传送带长为L,速度为v,与物块间的动摩擦因数为μ,则物块相对传送带滑动时的加速度
大小a=μg。
项目 图示 滑块可能的运动情况
v=0时,物块加速到v的位移x=
0
(1)一直加速
情景1 若x≥L即v≥时,物块一直加速到右端。
(2)先加速后匀速
若xv时,一直减速,或先减速再匀速
0
当v>v时,物块减速到v的位移x=,
0
若xv> ,物块先减速后匀速;
0
若x≥L,即v≤ ,物块一直减速到右端。
(2)当v=v 时,物块相对传送带静止随传送带匀速运动
0
情景2
到右端。
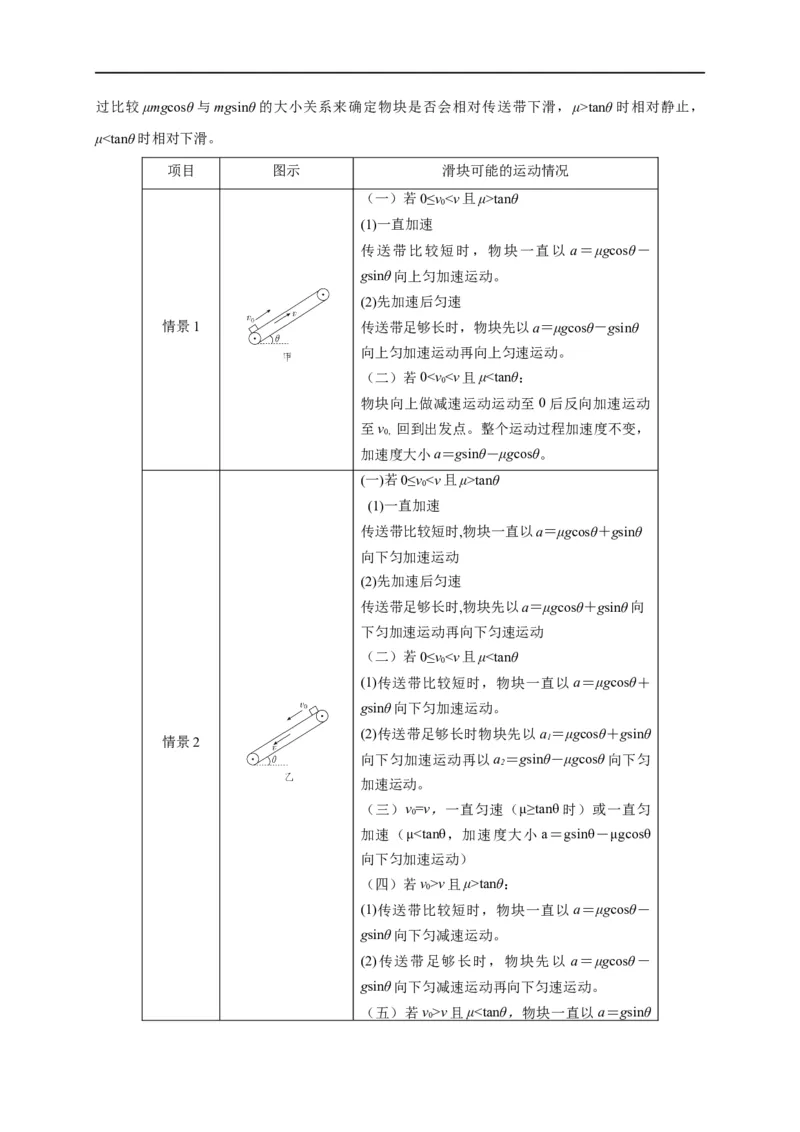
(3)vv,返回时速度为v,若vtanθ时相对静止,
μtanθ
0
(1)一直加速
传送带比较短时,物块一直以 a=μgcosθ-
gsinθ向上匀加速运动。
(2)先加速后匀速
情景1 传送带足够长时,物块先以a=μgcosθ-gsinθ
向上匀加速运动再向上匀速运动。
(二)若0tanθ
0
(1)一直加速
传送带比较短时,物块一直以a=μgcosθ+gsinθ
向下匀加速运动
(2)先加速后匀速
传送带足够长时,物块先以a=μgcosθ+gsinθ向
下匀加速运动再向下匀速运动
(二)若0≤vv且μ>tanθ:
0
(1)传送带比较短时,物块一直以a=μgcosθ-
gsinθ向下匀减速运动。
(2)传送带足够长时,物块先以 a=μgcosθ-
gsinθ向下匀减速运动再向下匀速运动。
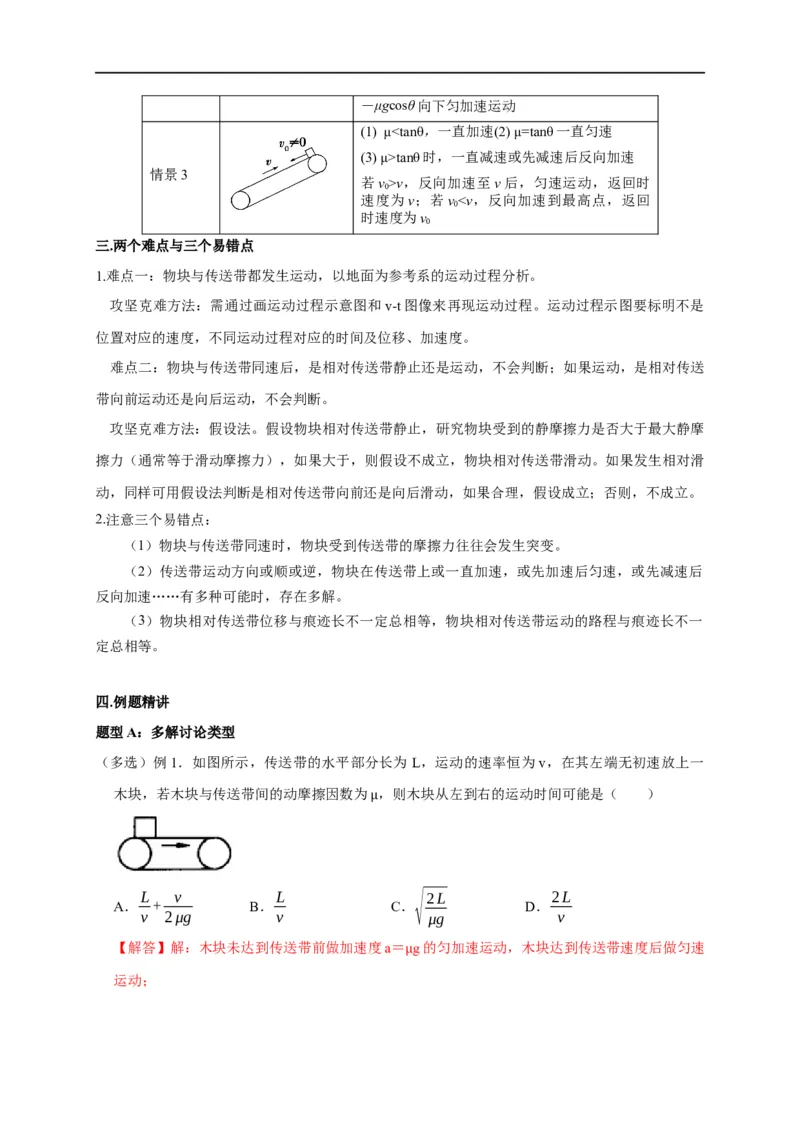
(五)若v>v且μtanθ时,一直减速或先减速后反向加速
情景3
若v>v,反向加速至v后,匀速运动,返回时
0
速度为v;若v
