文档内容
第十一章 简单机械和功
课时11.1 杠杆
1. 知道什么是杠杆及杠杆五要素,会画杠杆的力臂;
2. 理解杠杆的平衡条件及应用,会判断省力杠杆和费力杠杆;
题型汇总:杠杆及其五要素、杠杆的平衡条件、杠杆的分类、力臂的画法、杠杆的动态平衡分析、
杠杆中最小力的问题、杠杆的应用、探究杠杆的平衡条件实验。
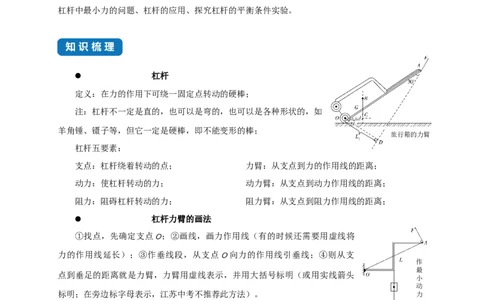
杠杆
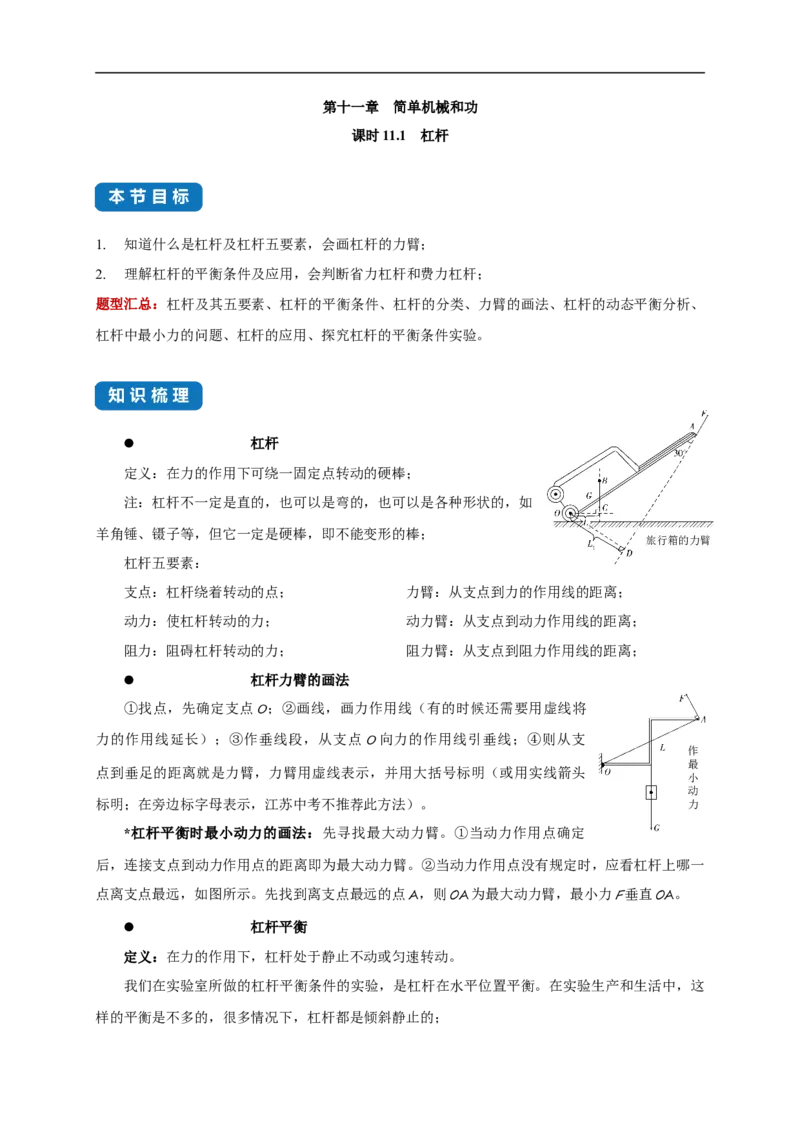
定义:在力的作用下可绕一固定点转动的硬棒;
注:杠杆不一定是直的,也可以是弯的,也可以是各种形状的,如
羊角锤、镊子等,但它一定是硬棒,即不能变形的棒;
旅行箱的力臂
杠杆五要素:
支点:杠杆绕着转动的点; 力臂:从支点到力的作用线的距离;
动力:使杠杆转动的力; 动力臂:从支点到动力作用线的距离;
阻力:阻碍杠杆转动的力; 阻力臂:从支点到阻力作用线的距离;
杠杆力臂的画法
①找点,先确定支点 ;②画线,画力作用线(有的时候还需要用虚线将
O
力的作用线延长);③作垂线段,从支点 向力的作用线引垂线;④则从支
O
作
最
点到垂足的距离就是力臂,力臂用虚线表示,并用大括号标明(或用实线箭头
小
动
标明;在旁边标字母表示,江苏中考不推荐此方法)。 力
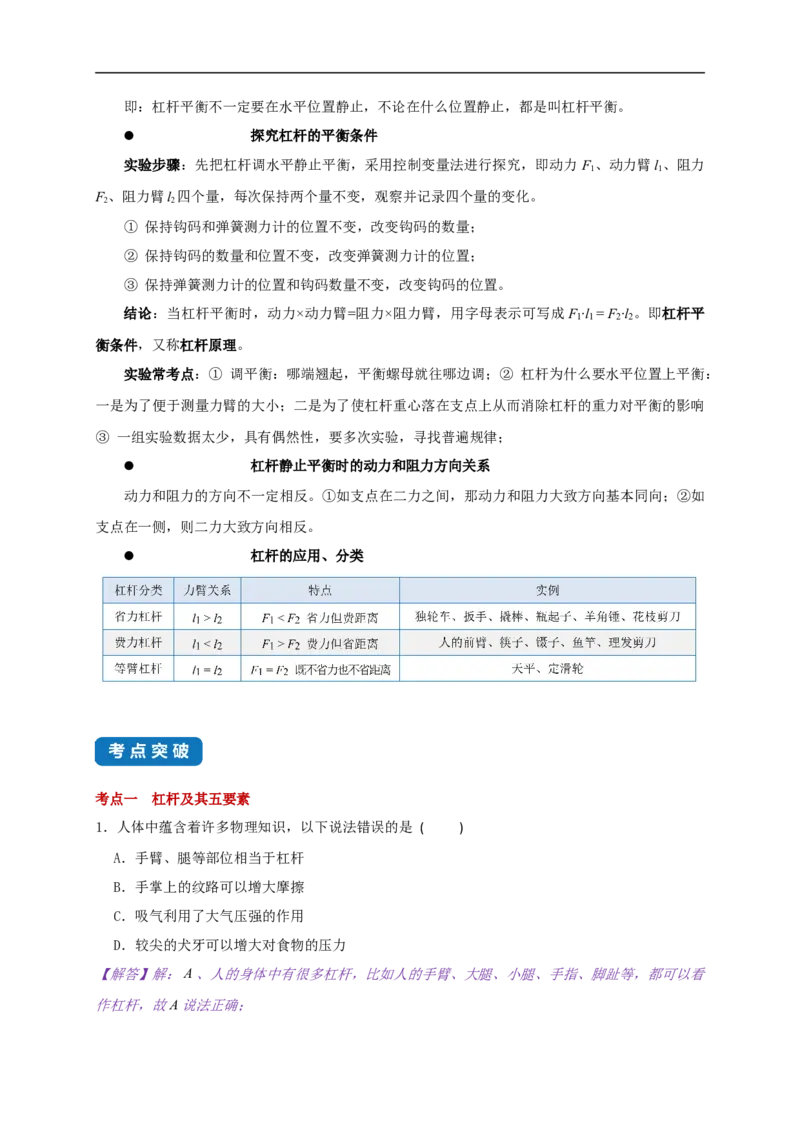
*杠杆平衡时最小动力的画法:先寻找最大动力臂。①当动力作用点确定
后,连接支点到动力作用点的距离即为最大动力臂。②当动力作用点没有规定时,应看杠杆上哪一
点离支点最远,如图所示。先找到离支点最远的点 ,则 为最大动力臂,最小力 垂直 。
A OA F OA
杠杆平衡
定义:在力的作用下,杠杆处于静止不动或匀速转动。
我们在实验室所做的杠杆平衡条件的实验,是杠杆在水平位置平衡。在实验生产和生活中,这
样的平衡是不多的,很多情况下,杠杆都是倾斜静止的;即:杠杆平衡不一定要在水平位置静止,不论在什么位置静止,都是叫杠杆平衡。
探究杠杆的平衡条件
实验步骤:先把杠杆调水平静止平衡,采用控制变量法进行探究,即动力 F 、动力臂l 、阻力
1 1
F、阻力臂l 四个量,每次保持两个量不变,观察并记录四个量的变化。
2 2
① 保持钩码和弹簧测力计的位置不变,改变钩码的数量;
② 保持钩码的数量和位置不变,改变弹簧测力计的位置;
③ 保持弹簧测力计的位置和钩码数量不变,改变钩码的位置。
结论:当杠杆平衡时,动力×动力臂=阻力×阻力臂,用字母表示可写成F ∙l = F ∙l 。即杠杆平
1 1 2 2
衡条件,又称杠杆原理。
实验常考点:① 调平衡:哪端翘起,平衡螺母就往哪边调;② 杠杆为什么要水平位置上平衡:
一是为了便于测量力臂的大小;二是为了使杠杆重心落在支点上从而消除杠杆的重力对平衡的影响
③ 一组实验数据太少,具有偶然性,要多次实验,寻找普遍规律;
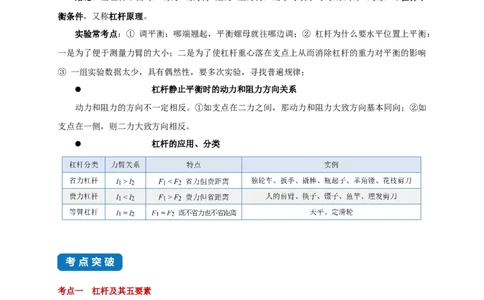
杠杆静止平衡时的动力和阻力方向关系
动力和阻力的方向不一定相反。①如支点在二力之间,那动力和阻力大致方向基本同向;②如
支点在一侧,则二力大致方向相反。
杠杆的应用、分类
考点一 杠杆及其五要素
1.人体中蕴含着许多物理知识,以下说法错误的是 ( )
A.手臂、腿等部位相当于杠杆
B.手掌上的纹路可以增大摩擦
C.吸气利用了大气压强的作用
D.较尖的犬牙可以增大对食物的压力
【解答】解:A、人的身体中有很多杠杆,比如人的手臂、大腿、小腿、手指、脚趾等,都可以看
作杠杆,故A说法正确;B、手掌的纹络,是增大了接触面的粗糙程度,从而增大了手与物体间的摩擦;故B说法正确;
C、人呼吸通过肺泡的扩张与收缩,利用了大气压强的作用;故C说法正确;
D、较尖的犬牙是通过减小受力面积来增大压强的,故D说法错误。
故选:D。
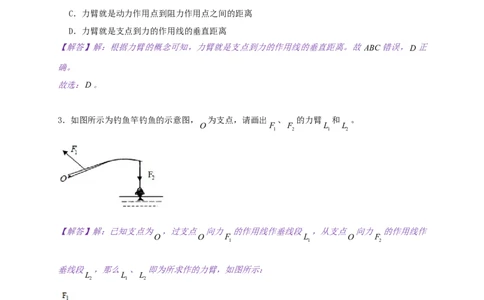
2.下列有关力臂说法正确的是 ( )
A.力臂就是力的作用点到支点的距离
B.力臂不可能等于零
C.力臂就是动力作用点到阻力作用点之间的距离
D.力臂就是支点到力的作用线的垂直距离
【解答】解:根据力臂的概念可知,力臂就是支点到力的作用线的垂直距离。故ABC错误,D正
确。
故选:D。
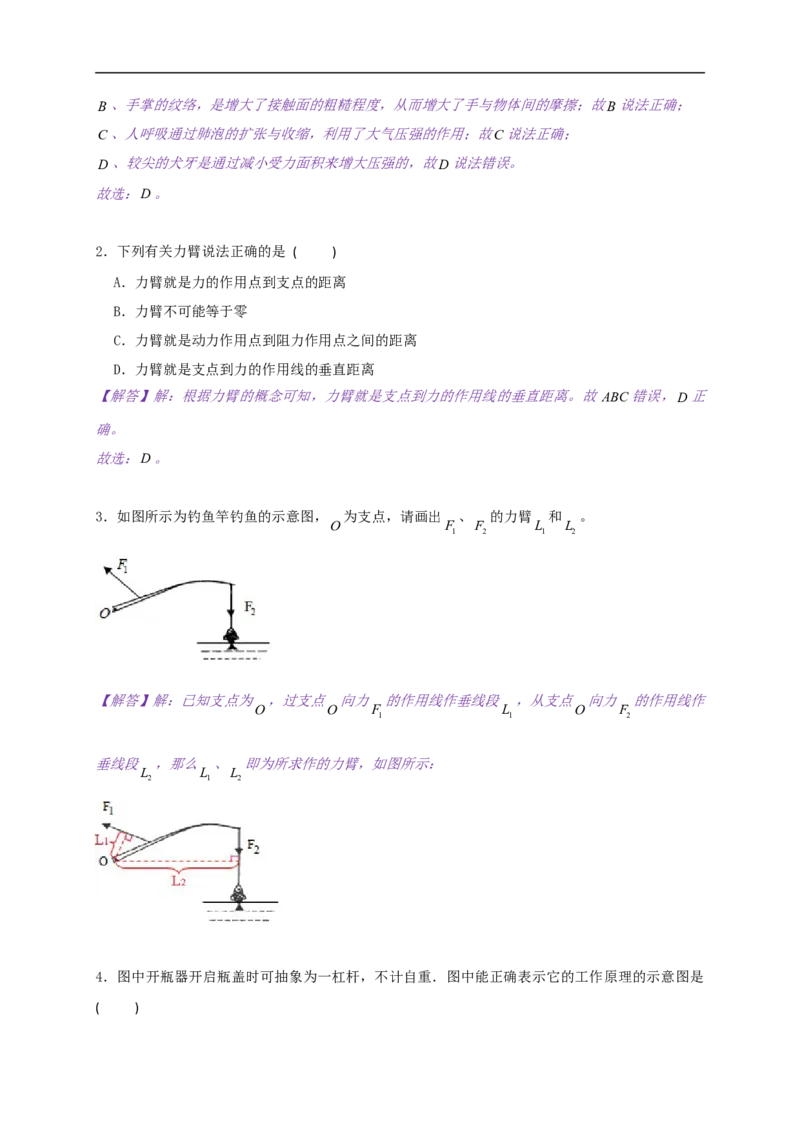
3.如图所示为钓鱼竿钓鱼的示意图, 为支点,请画出 、 的力臂 和 。
O F F L L
1 2 1 2
【解答】解:已知支点为 ,过支点 向力 的作用线作垂线段 ,从支点 向力 的作用线作
O O F L O F
1 1 2
垂线段 ,那么 、 即为所求作的力臂,如图所示:
L L L
2 1 2
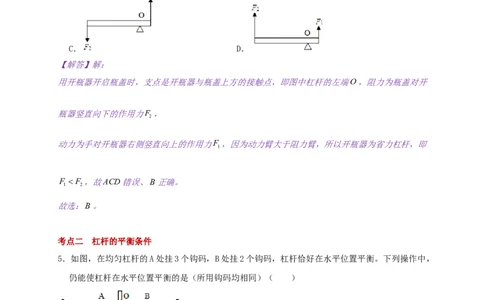
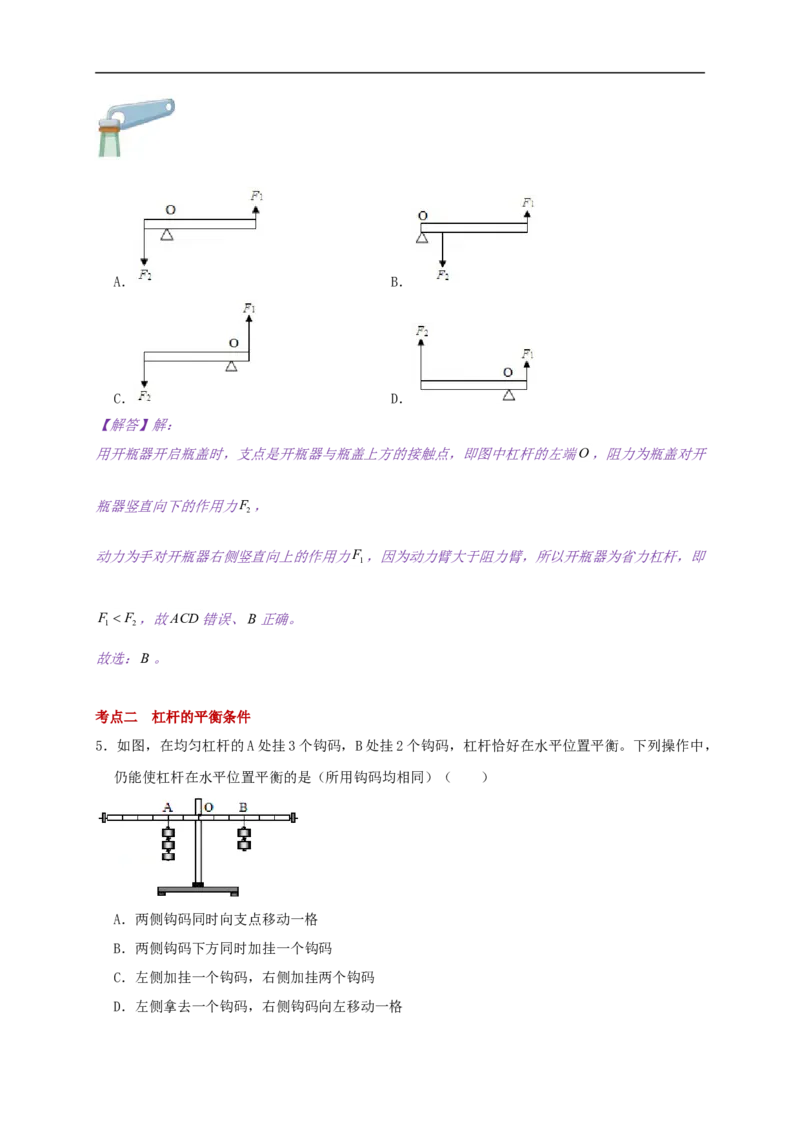
4.图中开瓶器开启瓶盖时可抽象为一杠杆,不计自重.图中能正确表示它的工作原理的示意图是
( )A. B.
C. D.
【解答】解:
用开瓶器开启瓶盖时,支点是开瓶器与瓶盖上方的接触点,即图中杠杆的左端O,阻力为瓶盖对开
瓶器竖直向下的作用力F ,
2
动力为手对开瓶器右侧竖直向上的作用力F ,因为动力臂大于阻力臂,所以开瓶器为省力杠杆,即
1
F F ,故ACD错误、B正确。
1 2
故选:B。
考点二 杠杆的平衡条件
5.如图,在均匀杠杆的A处挂3个钩码,B处挂2个钩码,杠杆恰好在水平位置平衡。下列操作中,
仍能使杠杆在水平位置平衡的是(所用钩码均相同)( )
A.两侧钩码同时向支点移动一格
B.两侧钩码下方同时加挂一个钩码
C.左侧加挂一个钩码,右侧加挂两个钩码
D.左侧拿去一个钩码,右侧钩码向左移动一格【解答】解:设每个钩码重力为G,每个小格长度为L;
A、两侧钩码同时向支点移动一格,左边:3G×L=3GL,右边:2G×2L=4GL,右边大于左边,杠杆
右边下倾,故A错误;
B、两侧钩码下方同时加挂一个钩码,左边:4G×2L=8GL,右边:3G×3L=9GL,右边大于左边,
杠杆右边下倾,故B错误;
C、左侧加挂一个钩码,右侧加挂两个钩码,左边:4G×2L=8GL,右边:4G×3L=12GL,右边大于
左边,杠杆右边下倾,故C错误;
D、左侧拿去一个钩码,右侧钩码向左移动一格,左边:2G×2L=4GL,右边:2G×2L=4GL,右边
等于左边,杠杆平衡,故D正确。
故选:D。
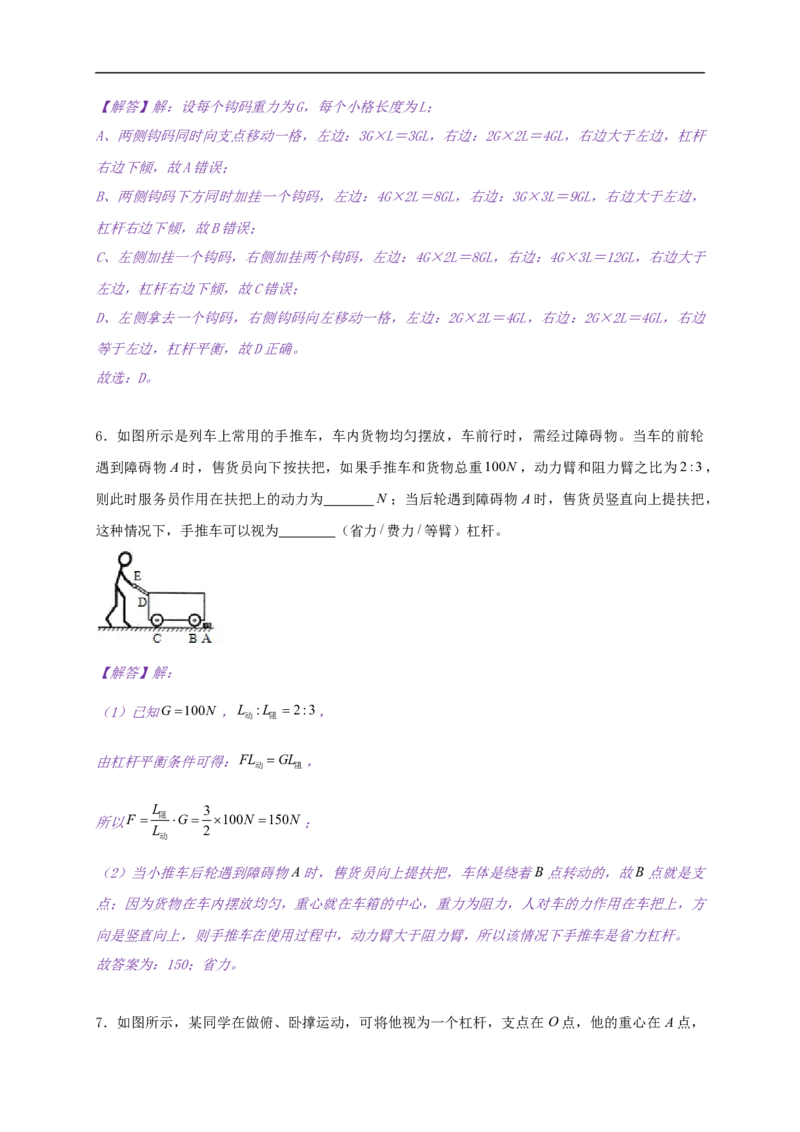
6.如图所示是列车上常用的手推车,车内货物均匀摆放,车前行时,需经过障碍物。当车的前轮
遇到障碍物A时,售货员向下按扶把,如果手推车和货物总重100N ,动力臂和阻力臂之比为2:3,
则此时服务员作用在扶把上的动力为 N;当后轮遇到障碍物A时,售货员竖直向上提扶把,
这种情况下,手推车可以视为 (省力/费力/等臂)杠杆。
【解答】解:
(1)已知G100N ,L :L 2:3,
动 阻
由杠杆平衡条件可得:FL GL ,
动 阻
L 3
所以F 阻 G 100N 150N ;
L 2
动
(2)当小推车后轮遇到障碍物A时,售货员向上提扶把,车体是绕着B点转动的,故B点就是支
点;因为货物在车内摆放均匀,重心就在车箱的中心,重力为阻力,人对车的力作用在车把上,方
向是竖直向上,则手推车在使用过程中,动力臂大于阻力臂,所以该情况下手推车是省力杠杆。
故答案为:150;省力。
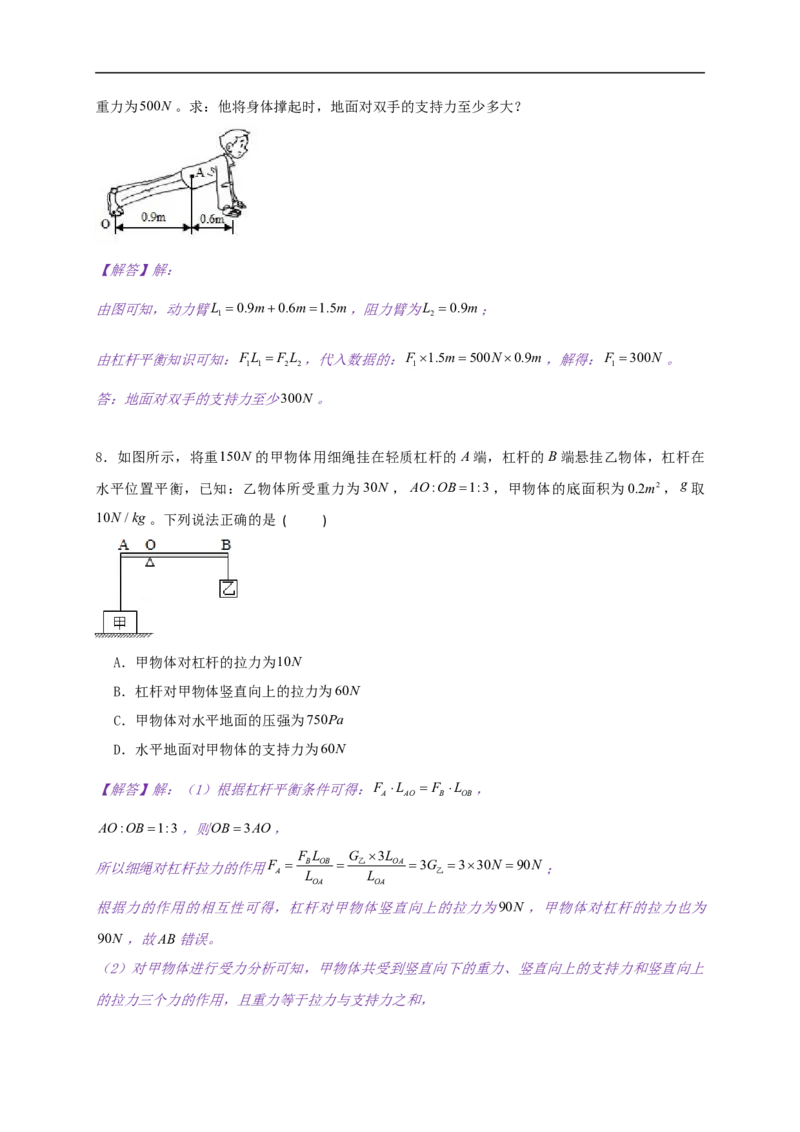
7.如图所示,某同学在做俯、卧撑运动,可将他视为一个杠杆,支点在 O点,他的重心在 A点,重力为500N 。求:他将身体撑起时,地面对双手的支持力至少多大?
【解答】解:
由图可知,动力臂L 0.9m0.6m1.5m,阻力臂为L 0.9m;
1 2
由杠杆平衡知识可知:FL F L ,代入数据的:F 1.5m500N0.9m,解得:F 300N 。
1 1 2 2 1 1
答:地面对双手的支持力至少300N。
8.如图所示,将重150N 的甲物体用细绳挂在轻质杠杆的 A端,杠杆的B端悬挂乙物体,杠杆在
水平位置平衡,已知:乙物体所受重力为30N , AO:OB1:3,甲物体的底面积为0.2m2,g取
10N /kg。下列说法正确的是 ( )
A.甲物体对杠杆的拉力为10N
B.杠杆对甲物体竖直向上的拉力为60N
C.甲物体对水平地面的压强为750Pa
D.水平地面对甲物体的支持力为60N
【解答】解:(1)根据杠杆平衡条件可得:F L F L ,
A AO B OB
AO:OB1:3,则OB3AO,
F L G 3L
所以细绳对杠杆拉力的作用F B OB 乙 OA 3G 330N 90N ;
A L L 乙
OA OA
根据力的作用的相互性可得,杠杆对甲物体竖直向上的拉力为90N ,甲物体对杠杆的拉力也为
90N ,故AB错误。
(2)对甲物体进行受力分析可知,甲物体共受到竖直向下的重力、竖直向上的支持力和竖直向上
的拉力三个力的作用,且重力等于拉力与支持力之和,则甲物体对地面的压力:F F G F 150N 90N 60N ,
甲 支 甲 A
F 60N
甲物体对地面的压强:p 甲 300Pa.故C错误,D正确。
S 0.2m2
故选:D。
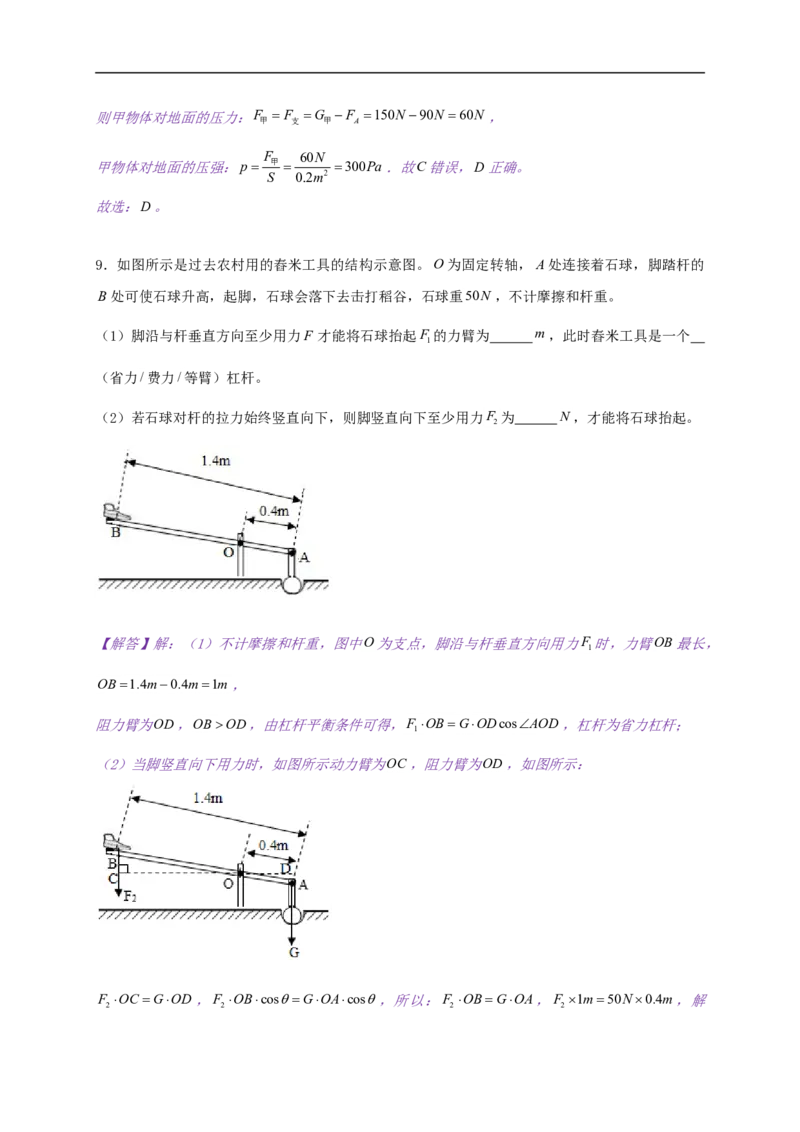
9.如图所示是过去农村用的舂米工具的结构示意图。O为固定转轴,A处连接着石球,脚踏杆的
B处可使石球升高,起脚,石球会落下去击打稻谷,石球重50N ,不计摩擦和杆重。
(1)脚沿与杆垂直方向至少用力F 才能将石球抬起F 的力臂为 m,此时舂米工具是一个
1
(省力/费力/等臂)杠杆。
(2)若石球对杆的拉力始终竖直向下,则脚竖直向下至少用力F 为 N,才能将石球抬起。
2
【解答】解:(1)不计摩擦和杆重,图中O为支点,脚沿与杆垂直方向用力F 时,力臂OB最长,
1
OB1.4m0.4m1m,
阻力臂为OD,OBOD,由杠杆平衡条件可得,F OBGODcosAOD,杠杆为省力杠杆;
1
(2)当脚竖直向下用力时,如图所示动力臂为OC,阻力臂为OD,如图所示:
F OC GOD,F OBcosGOAcos,所以:F OBGOA,F 1m50N0.4m,解
2 2 2 2得F 20N,故脚竖直向下用力F 为至少为20N。
2 2
故答案为:(1)1;省力;(2)20。
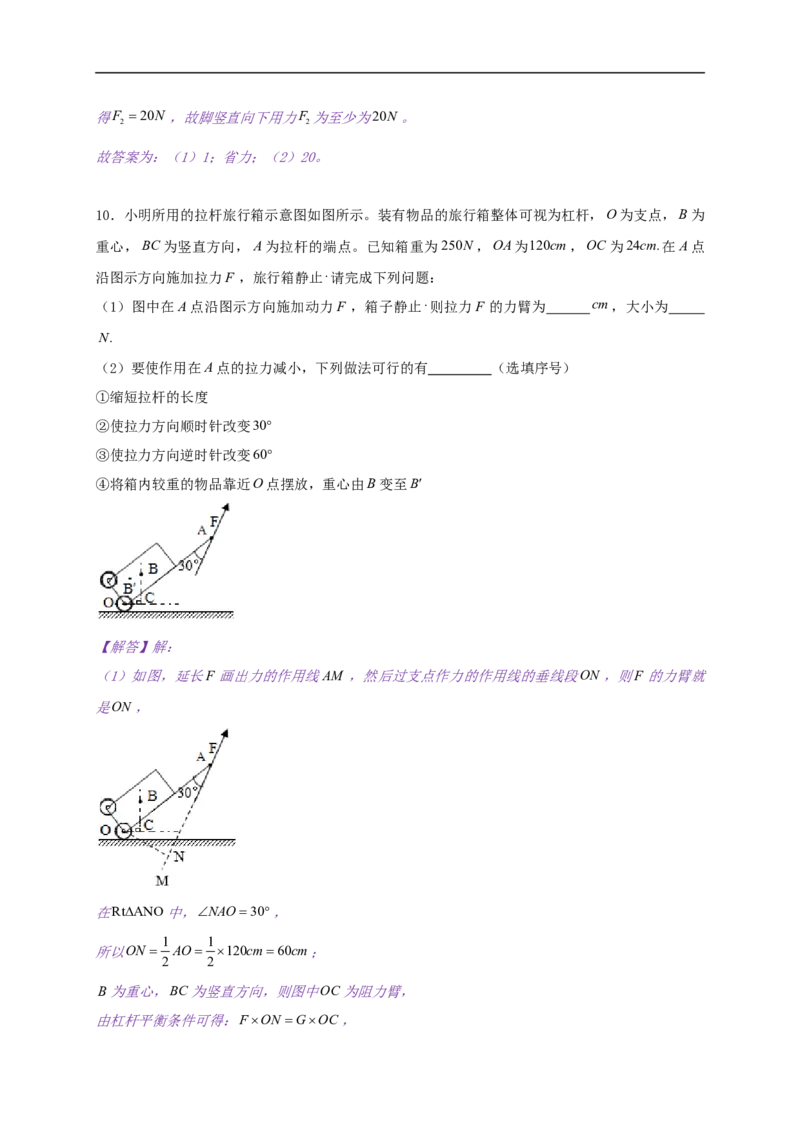
10.小明所用的拉杆旅行箱示意图如图所示。装有物品的旅行箱整体可视为杠杆,O为支点,B为
重心,BC为竖直方向, A为拉杆的端点。已知箱重为250N,OA为120cm,OC 为24cm.在A点
.
沿图示方向施加拉力F ,旅行箱静止 请完成下列问题:
(1)图中在A点沿图示方向施加动力F ,箱子静止 . 则拉力F 的力臂为 cm,大小为
N.
(2)要使作用在A点的拉力减小,下列做法可行的有 (选填序号)
①缩短拉杆的长度
②使拉力方向顺时针改变30
③使拉力方向逆时针改变60
④将箱内较重的物品靠近O点摆放,重心由B变至B
【解答】解:
(1)如图,延长F 画出力的作用线AM ,然后过支点作力的作用线的垂线段ON,则F 的力臂就
是ON,
在RtANO中,NAO30,
1 1
所以ON AO 120cm60cm;
2 2
B为重心,BC为竖直方向,则图中OC为阻力臂,
由杠杆平衡条件可得:FON GOC,即F60cm250N24cm,
解得F 100N ;
(2)①拉杆箱的重力、重力的力臂不变,缩短拉杆的长度,则拉力的力臂变短,根据杠杆的平衡
条件可知,拉力变大,故此方法不可行;
②拉杆箱的重力、重力的力臂不变,使拉力方向顺时针改变30,此时拉力的力臂为0,不省力,
不能使作用在A点的拉力减小,故此方法不可行;
③拉杆箱的重力、重力的力臂不变,使拉力方向逆时针改变60,此时拉力的力臂变大,根据杠杆
的平衡条件可知拉力变小,故此方法可行;
④拉杆箱的重力不变,将箱内较重的物品靠近O点摆放,重心由B变至B,重力的力臂变短,拉
力方向不变,拉力的力臂不变,根据杠杆的平衡条件可知,拉力变小,故此方法可行。
故选:③④。
故答案为:(1)60;100;(2)③④。
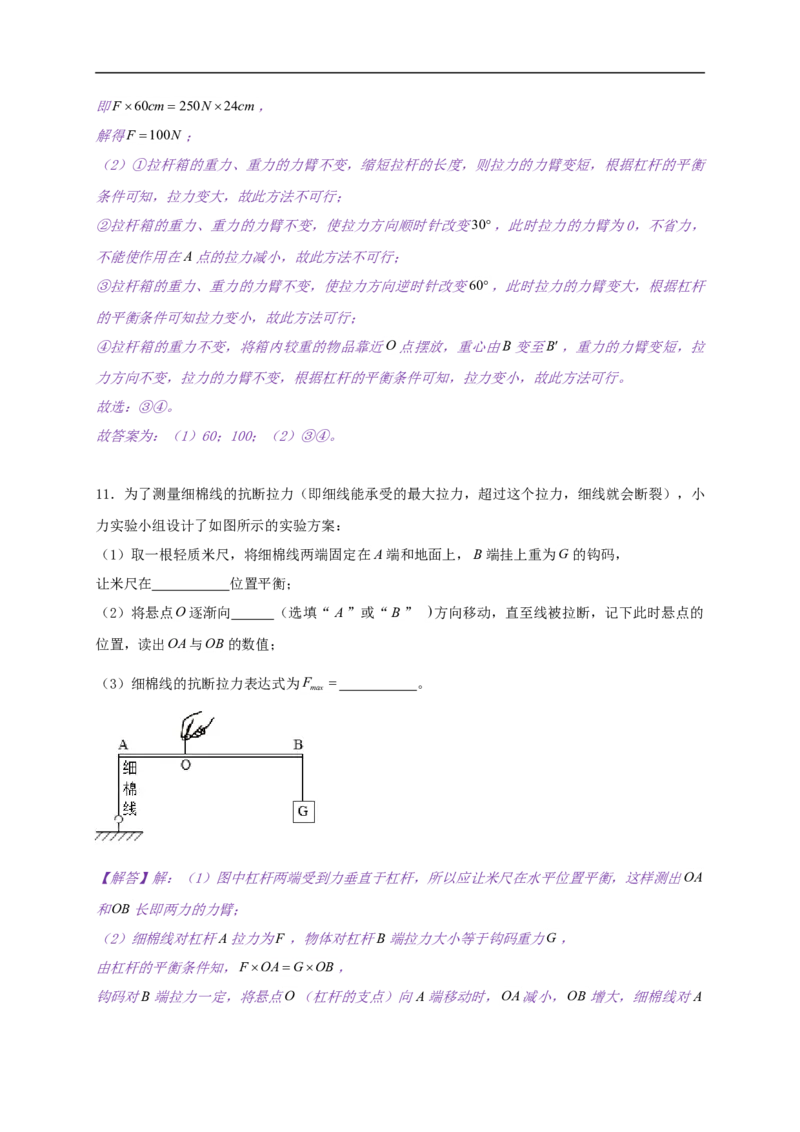
11.为了测量细棉线的抗断拉力(即细线能承受的最大拉力,超过这个拉力,细线就会断裂),小
力实验小组设计了如图所示的实验方案:
(1)取一根轻质米尺,将细棉线两端固定在A端和地面上,B端挂上重为G 的钩码,
让米尺在 位置平衡;
(2)将悬点O逐渐向 (选填“A”或“B” )方向移动,直至线被拉断,记下此时悬点的
位置,读出OA与OB的数值;
(3)细棉线的抗断拉力表达式为F 。
max
【解答】解:(1)图中杠杆两端受到力垂直于杠杆,所以应让米尺在水平位置平衡,这样测出OA
和OB长即两力的力臂;
(2)细棉线对杠杆A拉力为F ,物体对杠杆B端拉力大小等于钩码重力G,
由杠杆的平衡条件知,FOAGOB,
钩码对B端拉力一定,将悬点O(杠杆的支点)向A端移动时,OA减小,OB增大,细棉线对A端拉力增大;
(3)线被拉断时,F OAGOB,
max
OB
所以F G。
max OA
OB
故答案为:(1)水平;(2)A;(3) G。
OA
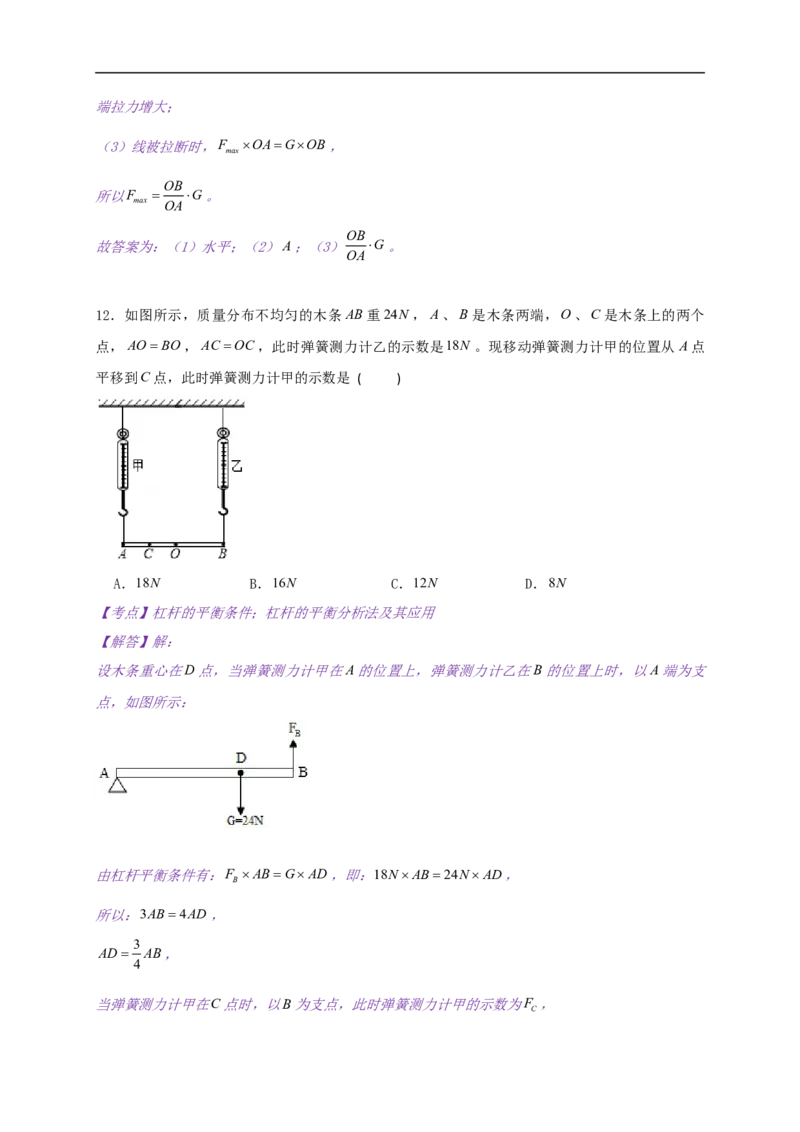
12.如图所示,质量分布不均匀的木条 AB重24N ,A、B是木条两端,O、C是木条上的两个
点,AOBO,AC OC,此时弹簧测力计乙的示数是18N 。现移动弹簧测力计甲的位置从 A点
平移到C点,此时弹簧测力计甲的示数是 ( )
A.18N B.16N C.12N D.8N
【考点】杠杆的平衡条件;杠杆的平衡分析法及其应用
【解答】解:
设木条重心在D点,当弹簧测力计甲在A的位置上,弹簧测力计乙在B的位置上时,以A端为支
点,如图所示:
由杠杆平衡条件有:F ABGAD,即:18NAB24NAD,
B
所以:3AB4AD,
3
AD AB,
4
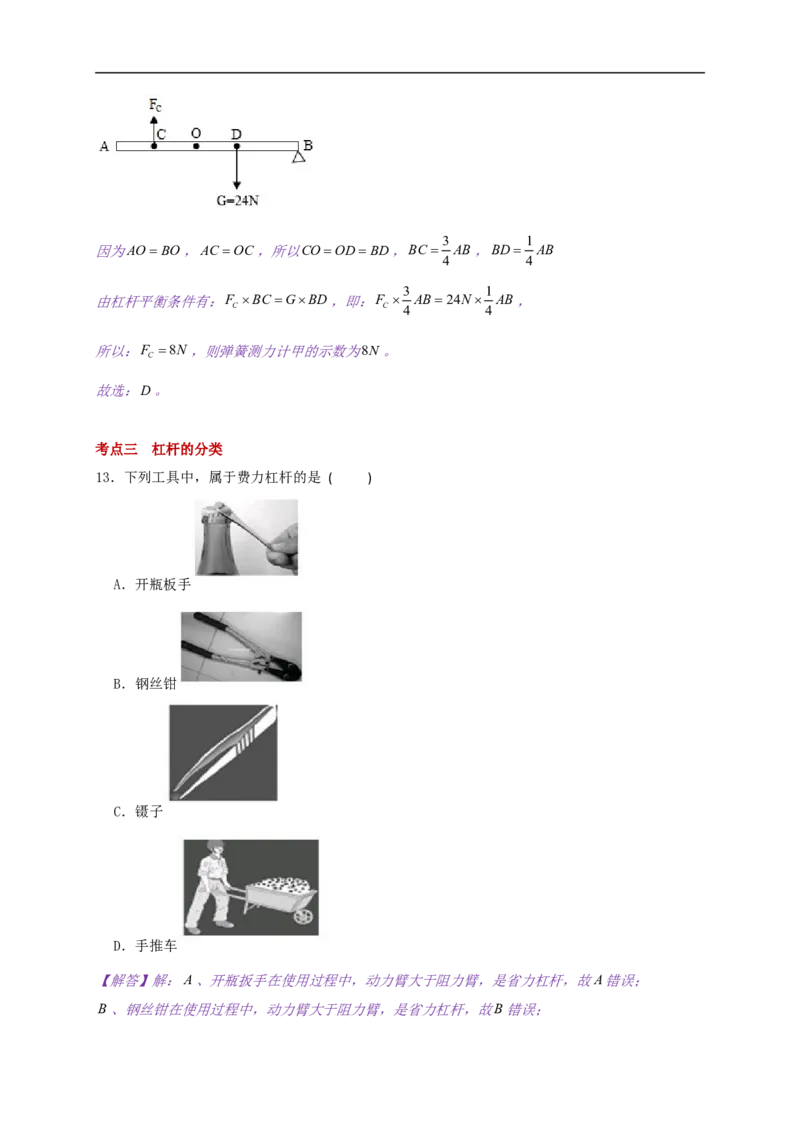
当弹簧测力计甲在C点时,以B为支点,此时弹簧测力计甲的示数为F ,
C3 1
因为AOBO,AC OC,所以COODBD,BC AB,BD AB
4 4
3 1
由杠杆平衡条件有:F BC GBD,即:F AB24N AB,
C C 4 4
所以:F 8N,则弹簧测力计甲的示数为8N。
C
故选:D。
考点三 杠杆的分类
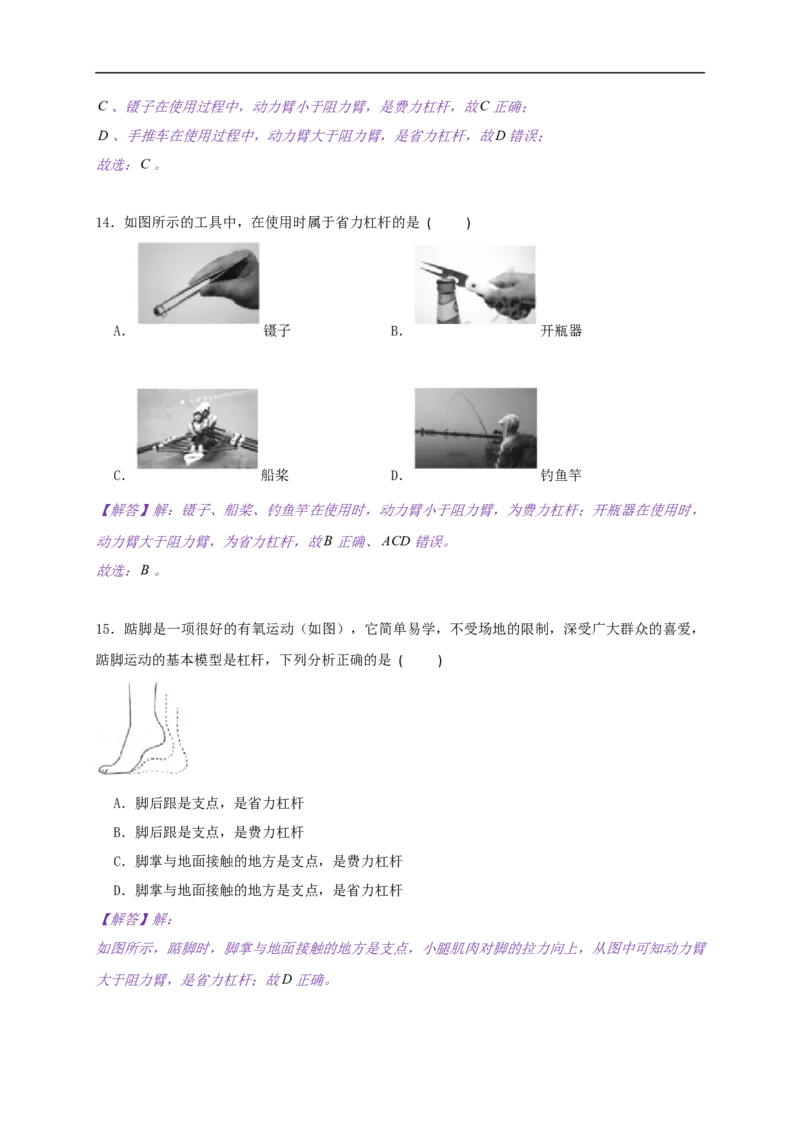
13.下列工具中,属于费力杠杆的是 ( )
A.开瓶板手
B.钢丝钳
C.镊子
D.手推车
【解答】解:A、开瓶扳手在使用过程中,动力臂大于阻力臂,是省力杠杆,故A错误;
B、钢丝钳在使用过程中,动力臂大于阻力臂,是省力杠杆,故B错误;C、镊子在使用过程中,动力臂小于阻力臂,是费力杠杆,故C正确;
D、手推车在使用过程中,动力臂大于阻力臂,是省力杠杆,故D错误;
故选:C。
14.如图所示的工具中,在使用时属于省力杠杆的是 ( )
A. 镊子 B. 开瓶器
C. 船桨 D. 钓鱼竿
【解答】解:镊子、船桨、钓鱼竿在使用时,动力臂小于阻力臂,为费力杠杆;开瓶器在使用时,
动力臂大于阻力臂,为省力杠杆,故B正确、ACD错误。
故选:B。
15.踮脚是一项很好的有氧运动(如图),它简单易学,不受场地的限制,深受广大群众的喜爱,
踮脚运动的基本模型是杠杆,下列分析正确的是 ( )
A.脚后跟是支点,是省力杠杆
B.脚后跟是支点,是费力杠杆
C.脚掌与地面接触的地方是支点,是费力杠杆
D.脚掌与地面接触的地方是支点,是省力杠杆
【解答】解:
如图所示,踮脚时,脚掌与地面接触的地方是支点,小腿肌肉对脚的拉力向上,从图中可知动力臂
大于阻力臂,是省力杠杆;故D正确。故选:D。
考点四 力臂的画法
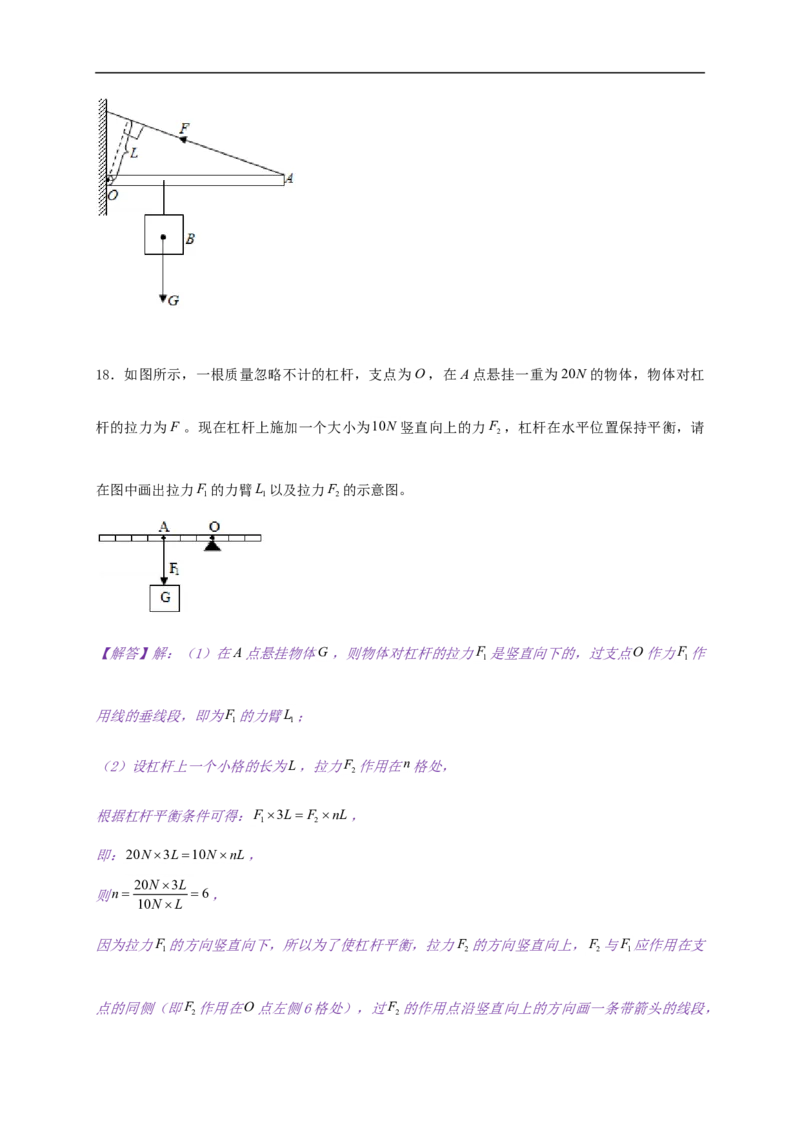
16.如图所示是用木棒撬石块的示意图,请在图中用小黑点标出支点,用符号O表示,并画出动力
F 的力臂l。
【解答】解:由图示可知,杠杆支点在小石头和撬棒的接触点上,过支点向动力作用线做垂线段,
即为其力臂L,如图所示:
17.如图所示,画出拉力F 的力臂l和物体B所受重力G 的示意图。 (根据要求完成下列作图)。
【解答】解:
(1)从支点O向力F 的作用线作垂线,支点到垂足的距离就是拉力F 的力臂L。
(2)重物的重心在物体的几何重心,重力的方向是竖直向下的,从重心起沿竖直向下的方向,画
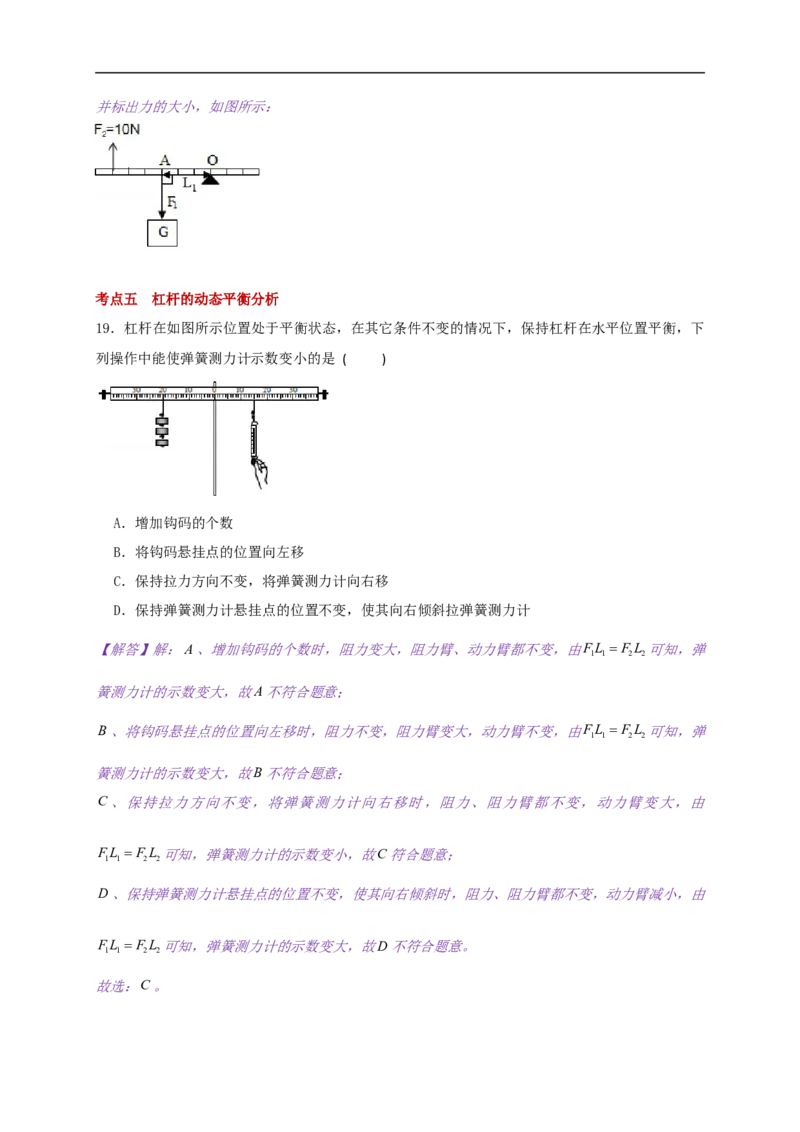
一条带箭头的线段;如图所示:18.如图所示,一根质量忽略不计的杠杆,支点为O,在A点悬挂一重为20N 的物体,物体对杠
杆的拉力为F 。现在杠杆上施加一个大小为10N 竖直向上的力F ,杠杆在水平位置保持平衡,请
2
在图中画出拉力F 的力臂L 以及拉力F 的示意图。
1 1 2
【解答】解:(1)在A点悬挂物体G,则物体对杠杆的拉力F 是竖直向下的,过支点O作力F 作
1 1
用线的垂线段,即为F 的力臂L ;
1 1
(2)设杠杆上一个小格的长为L,拉力F 作用在n格处,
2
根据杠杆平衡条件可得:F 3LF nL,
1 2
即:20N3L10NnL,
20N3L
则n 6,
10NL
因为拉力F 的方向竖直向下,所以为了使杠杆平衡,拉力F 的方向竖直向上,F 与F 应作用在支
1 2 2 1
点的同侧(即F 作用在O点左侧6格处),过F 的作用点沿竖直向上的方向画一条带箭头的线段,
2 2并标出力的大小,如图所示:
考点五 杠杆的动态平衡分析
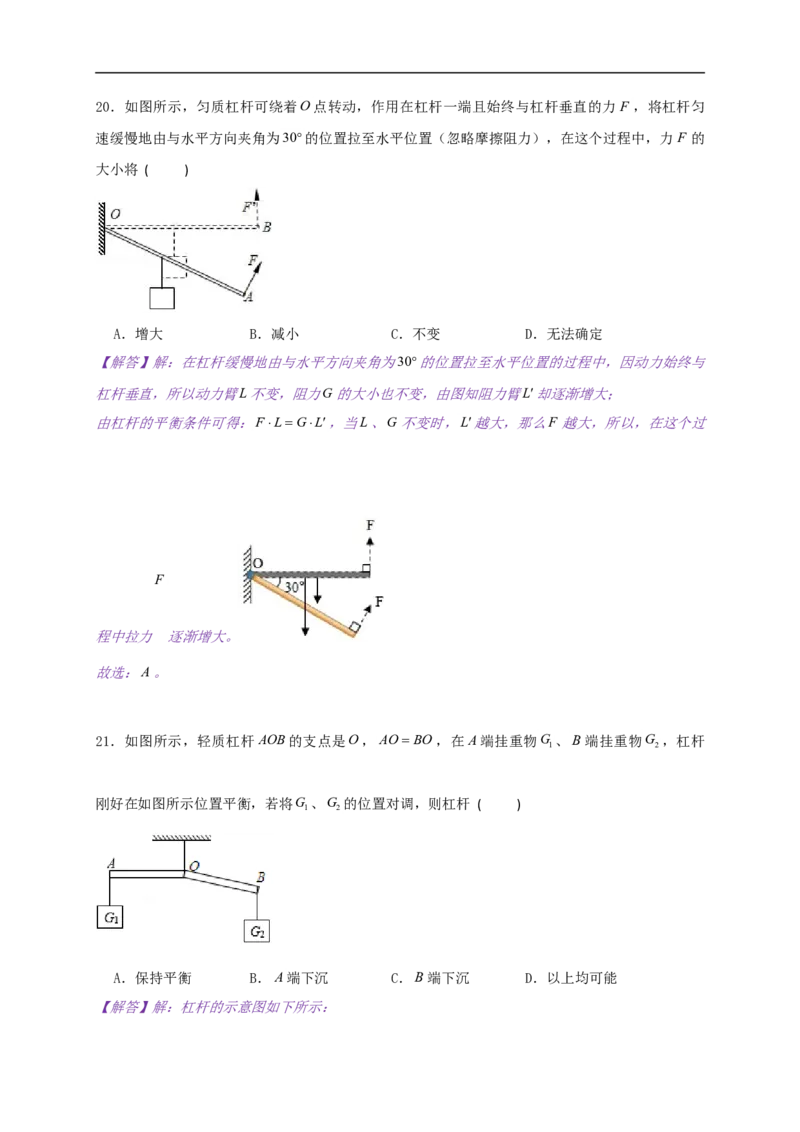
19.杠杆在如图所示位置处于平衡状态,在其它条件不变的情况下,保持杠杆在水平位置平衡,下
列操作中能使弹簧测力计示数变小的是 ( )
A.增加钩码的个数
B.将钩码悬挂点的位置向左移
C.保持拉力方向不变,将弹簧测力计向右移
D.保持弹簧测力计悬挂点的位置不变,使其向右倾斜拉弹簧测力计
【解答】解:A、增加钩码的个数时,阻力变大,阻力臂、动力臂都不变,由FL F L 可知,弹
1 1 2 2
簧测力计的示数变大,故A不符合题意;
B、将钩码悬挂点的位置向左移时,阻力不变,阻力臂变大,动力臂不变,由FL F L 可知,弹
1 1 2 2
簧测力计的示数变大,故B不符合题意;
C、保持拉力方向不变,将弹簧测力计向右移时,阻力、阻力臂都不变,动力臂变大,由
FL F L 可知,弹簧测力计的示数变小,故C符合题意;
1 1 2 2
D、保持弹簧测力计悬挂点的位置不变,使其向右倾斜时,阻力、阻力臂都不变,动力臂减小,由
FL F L 可知,弹簧测力计的示数变大,故D不符合题意。
1 1 2 2
故选:C。20.如图所示,匀质杠杆可绕着O点转动,作用在杠杆一端且始终与杠杆垂直的力F ,将杠杆匀
速缓慢地由与水平方向夹角为30的位置拉至水平位置(忽略摩擦阻力),在这个过程中,力 F 的
大小将 ( )
A.增大 B.减小 C.不变 D.无法确定
【解答】解:在杠杆缓慢地由与水平方向夹角为30的位置拉至水平位置的过程中,因动力始终与
杠杆垂直,所以动力臂L不变,阻力G的大小也不变,由图知阻力臂L却逐渐增大;
由杠杆的平衡条件可得:FLGL,当L、G不变时,L越大,那么F 越大,所以,在这个过
F
程中拉力 逐渐增大。
故选:A。
21.如图所示,轻质杠杆AOB的支点是O,AOBO,在A端挂重物G 、B端挂重物G ,杠杆
1 2
刚好在如图所示位置平衡,若将G 、G 的位置对调,则杠杆 ( )
1 2
A.保持平衡 B.A端下沉 C.B端下沉 D.以上均可能
【解答】解:杠杆的示意图如下所示:重物对B端施加的力大小等于G ,力臂为OC;
2
重物对A端施加的力大小等于G ,力臂为OA,
1
因OCOBOA,
根据杠杆的平衡条件:FL F L 可知,G G ;
1 1 2 2 1 2
若将G 、G 的位置对调,G G ;OCOA,则GOCG OA,故杠杆的A端下沉。
1 2 1 2 1 2
故选:B。
考点六 杠杆中最小力的问题
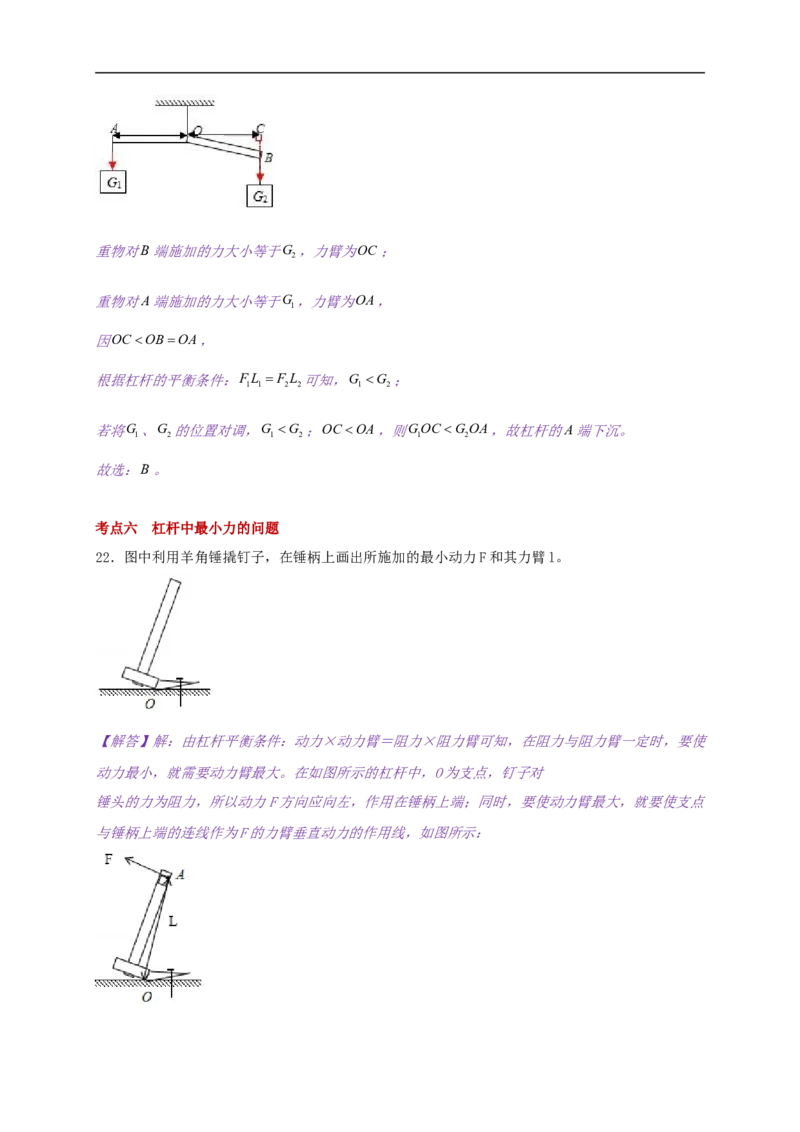
22.图中利用羊角锤撬钉子,在锤柄上画出所施加的最小动力F和其力臂l。
【解答】解:由杠杆平衡条件:动力×动力臂=阻力×阻力臂可知,在阻力与阻力臂一定时,要使
动力最小,就需要动力臂最大。在如图所示的杠杆中,O为支点,钉子对
锤头的力为阻力,所以动力F方向应向左,作用在锤柄上端;同时,要使动力臂最大,就要使支点
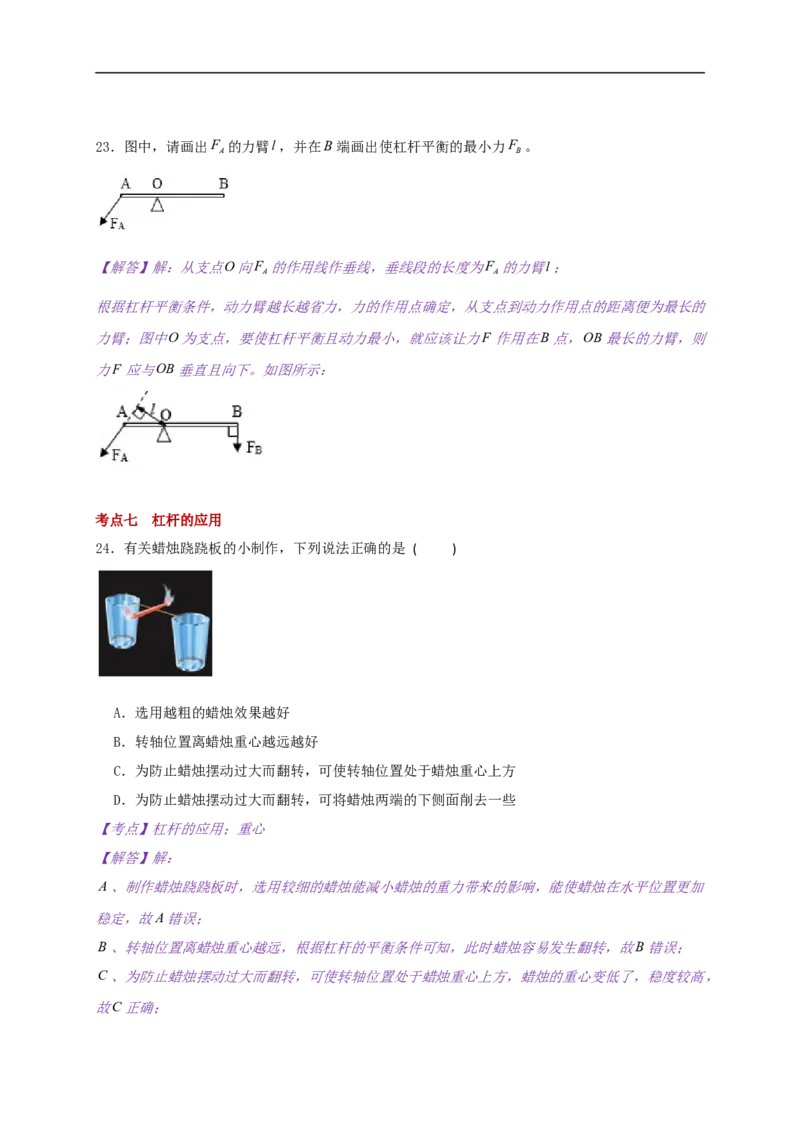
与锤柄上端的连线作为F的力臂垂直动力的作用线,如图所示:23.图中,请画出F 的力臂l,并在B端画出使杠杆平衡的最小力F 。
A B
【解答】解:从支点O向F 的作用线作垂线,垂线段的长度为F 的力臂l;
A A
根据杠杆平衡条件,动力臂越长越省力,力的作用点确定,从支点到动力作用点的距离便为最长的
力臂;图中O为支点,要使杠杆平衡且动力最小,就应该让力F 作用在B点,OB最长的力臂,则
力F 应与OB垂直且向下。如图所示:
考点七 杠杆的应用
24.有关蜡烛跷跷板的小制作,下列说法正确的是 ( )
A.选用越粗的蜡烛效果越好
B.转轴位置离蜡烛重心越远越好
C.为防止蜡烛摆动过大而翻转,可使转轴位置处于蜡烛重心上方
D.为防止蜡烛摆动过大而翻转,可将蜡烛两端的下侧面削去一些
【考点】杠杆的应用;重心
【解答】解:
A、制作蜡烛跷跷板时,选用较细的蜡烛能减小蜡烛的重力带来的影响,能使蜡烛在水平位置更加
稳定,故A错误;
B、转轴位置离蜡烛重心越远,根据杠杆的平衡条件可知,此时蜡烛容易发生翻转,故B错误;
C、为防止蜡烛摆动过大而翻转,可使转轴位置处于蜡烛重心上方,蜡烛的重心变低了,稳度较高,
故C正确;D、为防止蜡烛摆动过大而翻转,可将蜡烛两端的上侧面削去一些,这样能降低蜡烛的重心,增大
稳度,故D错误。
故选:C。
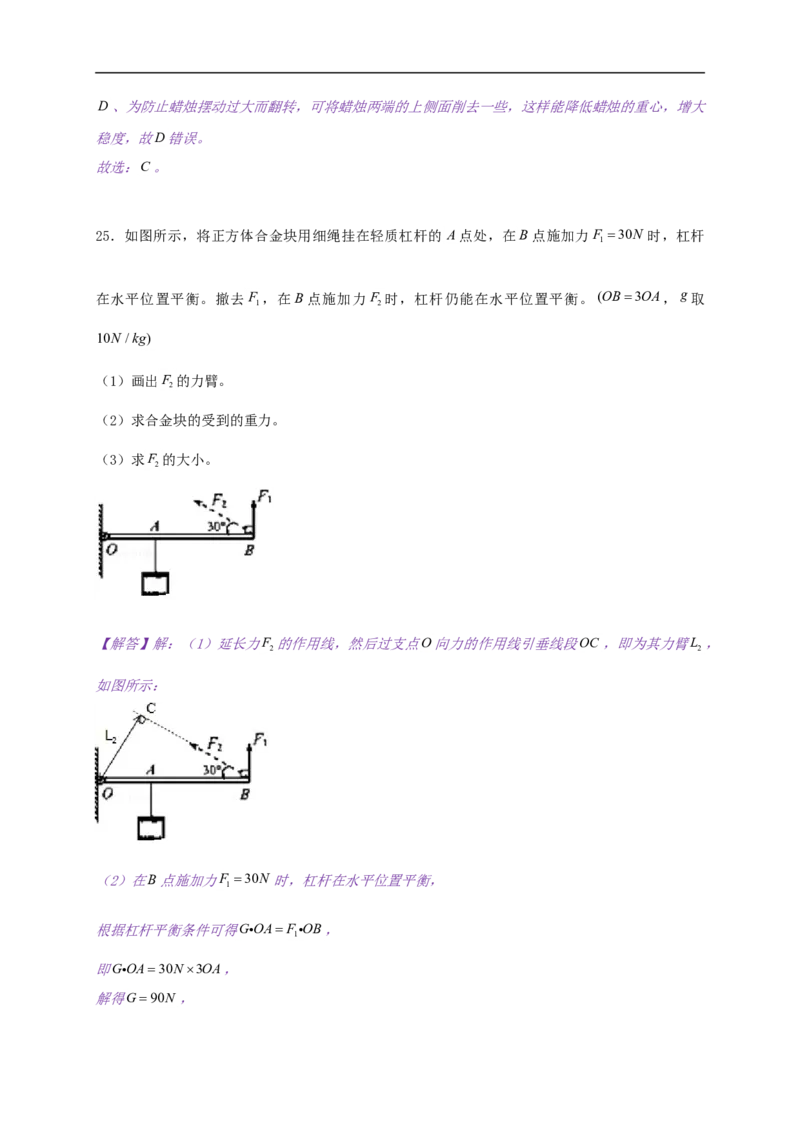
25.如图所示,将正方体合金块用细绳挂在轻质杠杆的 A点处,在B点施加力F 30N 时,杠杆
1
在水平位置平衡。撤去 F ,在B点施加力F 时,杠杆仍能在水平位置平衡。 (OB3OA, g 取
1 2
10N /kg)
(1)画出F 的力臂。
2
(2)求合金块的受到的重力。
(3)求F 的大小。
2
【解答】解:(1)延长力F 的作用线,然后过支点O向力的作用线引垂线段OC,即为其力臂L ,
2 2
如图所示:
(2)在B点施加力F 30N 时,杠杆在水平位置平衡,
1
根据杠杆平衡条件可得G
OAF
1
OB,
即G OA30N3OA,
解得G90N,(3)从图中可以看出,OCB为直角三角形,而直角三角形中30角所对的直角边等于斜边的一半,
1
故拉力F 的力臂为L OB,
2 2 2
撤去F ,在B点施加F 时,杠杆仍能在水平位置平衡,
1 2
根据杠杆平衡条件可得G OAF L ,
2 2
1
90N OB
则F G OA 3 60N。
2 L 1
2 OB
2
答:(1)见解答图。
(2)合金块的受到的重力为90N 。
(3)F 的大小为60N。
2
考点八 探究杠杆的平衡条件实验
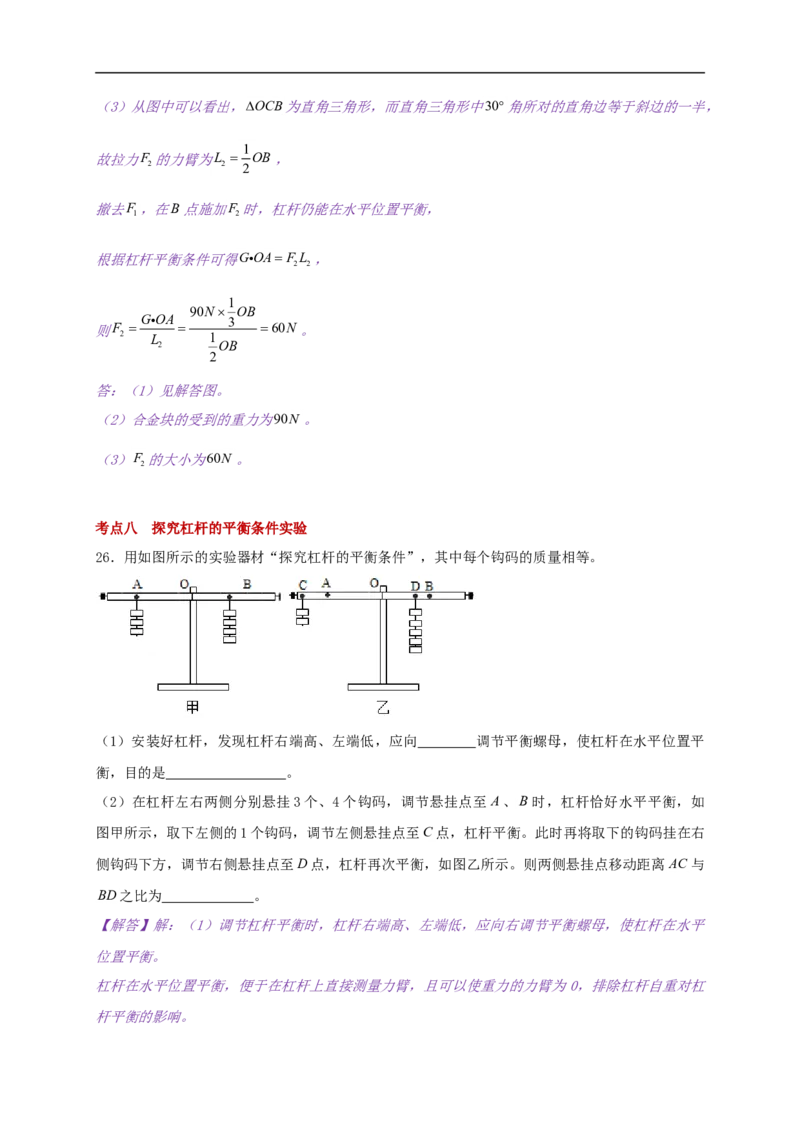
26.用如图所示的实验器材“探究杠杆的平衡条件”,其中每个钩码的质量相等。
(1)安装好杠杆,发现杠杆右端高、左端低,应向 调节平衡螺母,使杠杆在水平位置平
衡,目的是 。
(2)在杠杆左右两侧分别悬挂3个、4个钩码,调节悬挂点至A、B时,杠杆恰好水平平衡,如
图甲所示,取下左侧的1个钩码,调节左侧悬挂点至C点,杠杆平衡。此时再将取下的钩码挂在右
侧钩码下方,调节右侧悬挂点至D点,杠杆再次平衡,如图乙所示。则两侧悬挂点移动距离 AC 与
BD之比为 。
【解答】解:(1)调节杠杆平衡时,杠杆右端高、左端低,应向右调节平衡螺母,使杠杆在水平
位置平衡。
杠杆在水平位置平衡,便于在杠杆上直接测量力臂,且可以使重力的力臂为0,排除杠杆自重对杠
杆平衡的影响。(2)设每个钩码的重力为G,
由图甲和杠杆平衡条件可得:3GOA4GOB①
取下左侧的1个钩码,调节左侧悬挂点至C点,杠杆平衡,则2G(OA AC)4GOB②
由图乙和杠杆平衡条件可得:G(OA AC)5G(OBBD)③
联立①②③可得:AC:BD10:9。
故答案为:(1)右;便于测量力臂;(2)10:9。
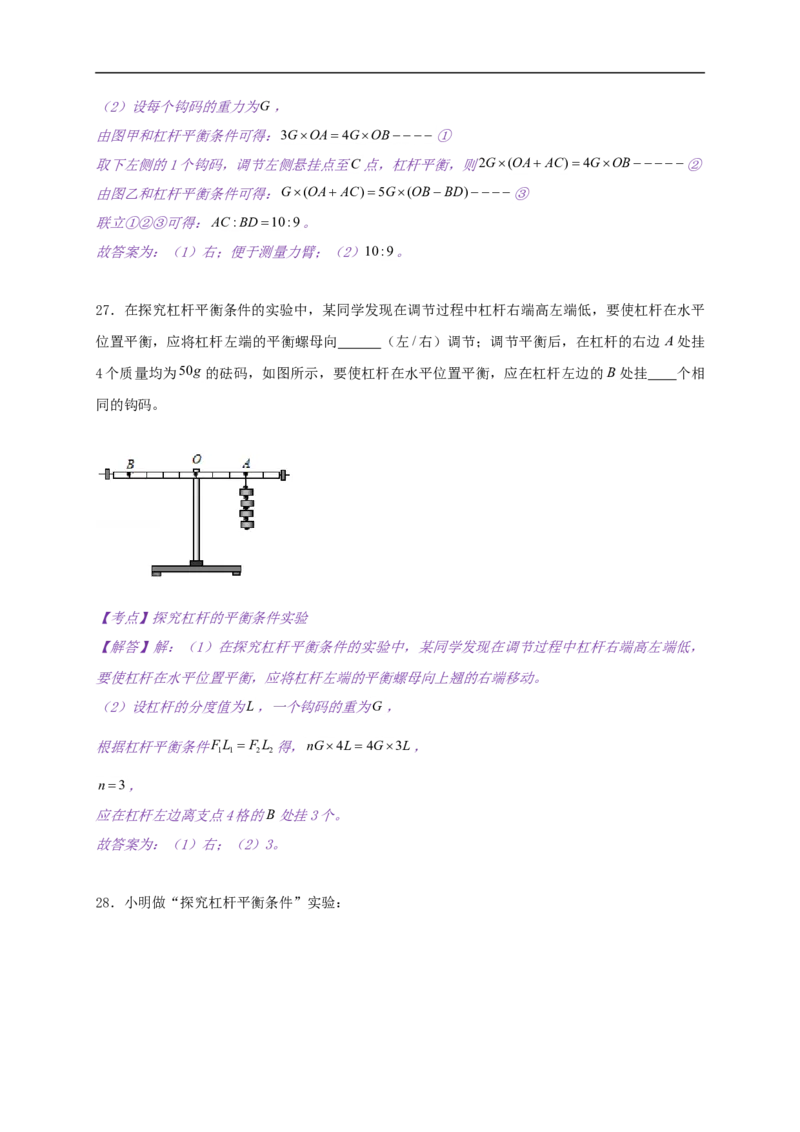
27.在探究杠杆平衡条件的实验中,某同学发现在调节过程中杠杆右端高左端低,要使杠杆在水平
位置平衡,应将杠杆左端的平衡螺母向 (左/右)调节;调节平衡后,在杠杆的右边 A处挂
4个质量均为50g 的砝码,如图所示,要使杠杆在水平位置平衡,应在杠杆左边的B处挂 个相
同的钩码。
【考点】探究杠杆的平衡条件实验
【解答】解:(1)在探究杠杆平衡条件的实验中,某同学发现在调节过程中杠杆右端高左端低,
要使杠杆在水平位置平衡,应将杠杆左端的平衡螺母向上翘的右端移动。
(2)设杠杆的分度值为L,一个钩码的重为G,
根据杠杆平衡条件FL F L 得,nG4L4G3L,
1 1 2 2
n3,
应在杠杆左边离支点4格的B处挂3个。
故答案为:(1)右;(2)3。
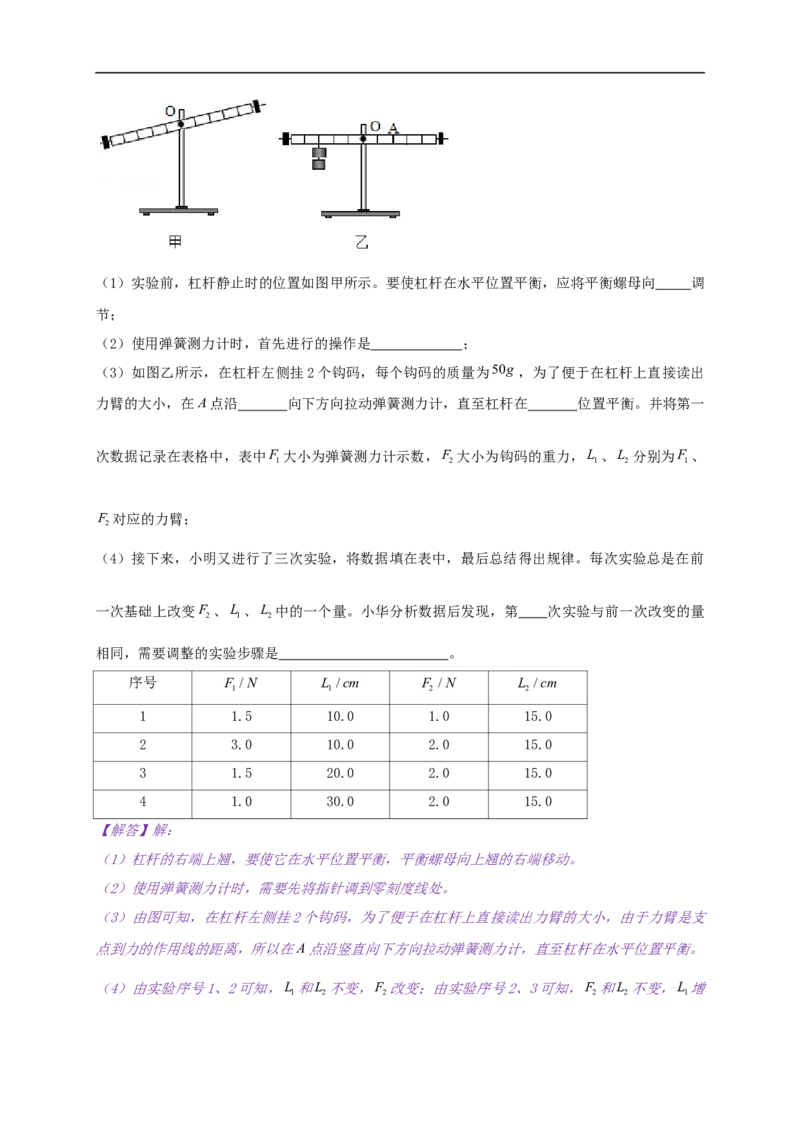
28.小明做“探究杠杆平衡条件”实验:(1)实验前,杠杆静止时的位置如图甲所示。要使杠杆在水平位置平衡,应将平衡螺母向 调
节;
(2)使用弹簧测力计时,首先进行的操作是 ;
(3)如图乙所示,在杠杆左侧挂2个钩码,每个钩码的质量为50g ,为了便于在杠杆上直接读出
力臂的大小,在A点沿 向下方向拉动弹簧测力计,直至杠杆在 位置平衡。并将第一
次数据记录在表格中,表中F 大小为弹簧测力计示数,F 大小为钩码的重力,L 、L 分别为F 、
1 2 1 2 1
F 对应的力臂;
2
(4)接下来,小明又进行了三次实验,将数据填在表中,最后总结得出规律。每次实验总是在前
一次基础上改变F 、L 、L 中的一个量。小华分析数据后发现,第 次实验与前一次改变的量
2 1 2
相同,需要调整的实验步骤是 。
序号 F /N L /cm F /N L /cm
1 1 2 2
1 1.5 10.0 1.0 15.0
2 3.0 10.0 2.0 15.0
3 1.5 20.0 2.0 15.0
4 1.0 30.0 2.0 15.0
【解答】解:
(1)杠杆的右端上翘,要使它在水平位置平衡,平衡螺母向上翘的右端移动。
(2)使用弹簧测力计时,需要先将指针调到零刻度线处。
(3)由图可知,在杠杆左侧挂2个钩码,为了便于在杠杆上直接读出力臂的大小,由于力臂是支
点到力的作用线的距离,所以在A点沿竖直向下方向拉动弹簧测力计,直至杠杆在水平位置平衡。
(4)由实验序号1、2可知,L 和L 不变,F 改变;由实验序号2、3可知,F 和L 不变,L 增
1 2 2 2 2 1大10cm;由序号4、3可知,F 和L 不变,L 增大10cm,所以第4次实验与前一次改变的量相同。
2 2 1
由于要分别改变F 、L 、L 中的一个量,所以还需要改变L ,具体步骤为:保持F 和L 不变,改
2 1 2 2 2 1
变L 的大小。
2
故答案为:(1)右;(2)将指针调到零刻度线处;(3)竖直;水平;(4)4;保持F 和L 不变,
2 1
改变L 的大小。
2
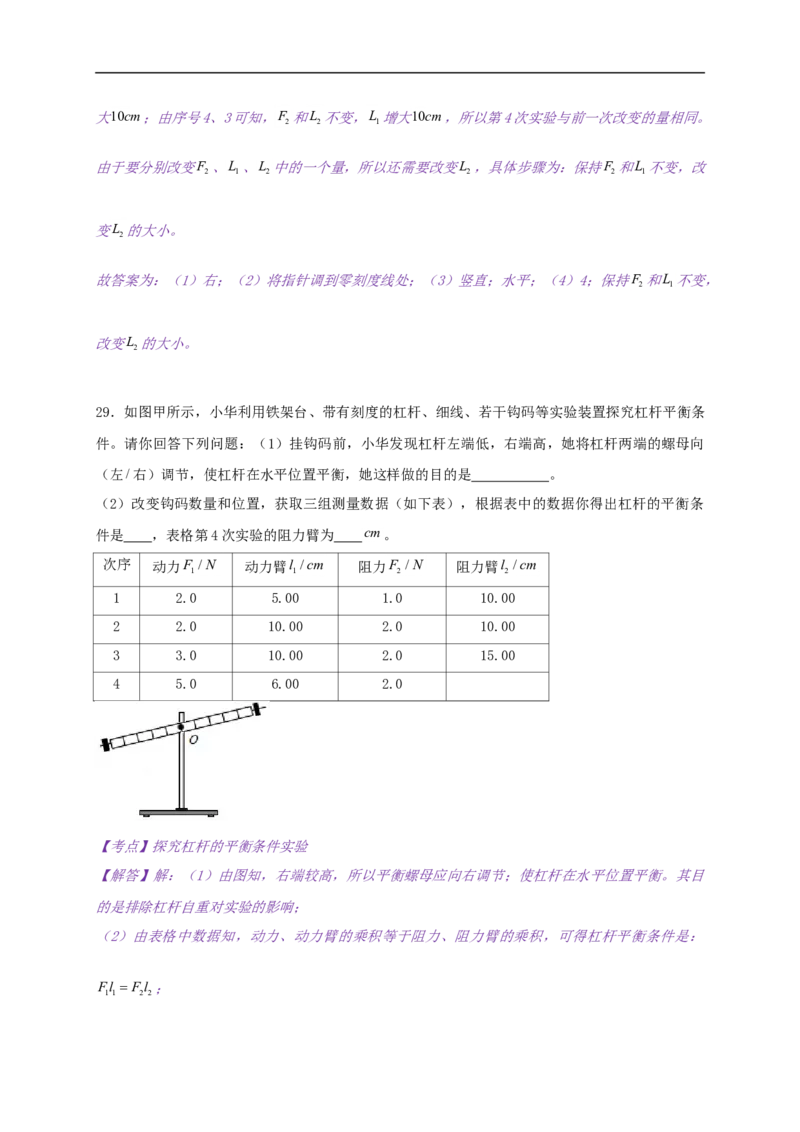
29.如图甲所示,小华利用铁架台、带有刻度的杠杆、细线、若干钩码等实验装置探究杠杆平衡条
件。请你回答下列问题:(1)挂钩码前,小华发现杠杆左端低,右端高,她将杠杆两端的螺母向
(左/右)调节,使杠杆在水平位置平衡,她这样做的目的是 。
(2)改变钩码数量和位置,获取三组测量数据(如下表),根据表中的数据你得出杠杆的平衡条
件是 ,表格第4次实验的阻力臂为 cm。
次序 动力F /N 动力臂l /cm 阻力F /N 阻力臂l /cm
1 1 2 2
1 2.0 5.00 1.0 10.00
2 2.0 10.00 2.0 10.00
3 3.0 10.00 2.0 15.00
4 5.0 6.00 2.0
【考点】探究杠杆的平衡条件实验
【解答】解:(1)由图知,右端较高,所以平衡螺母应向右调节;使杠杆在水平位置平衡。其目
的是排除杠杆自重对实验的影响;
(2)由表格中数据知,动力、动力臂的乘积等于阻力、阻力臂的乘积,可得杠杆平衡条件是:
Fl Fl ;
11 2 2根据杠杆平衡条件:Fl Fl
11 2 2
代入数据:5.0N6.00cm2.0Nl
2
解得:l 15.00cm,
2
表格第4次实验的阻力臂为15.00cm。
故答案为:(1)右;排除杠杆自重对实验的影响;(2)F l F l ;15.00。
1 1 2 2
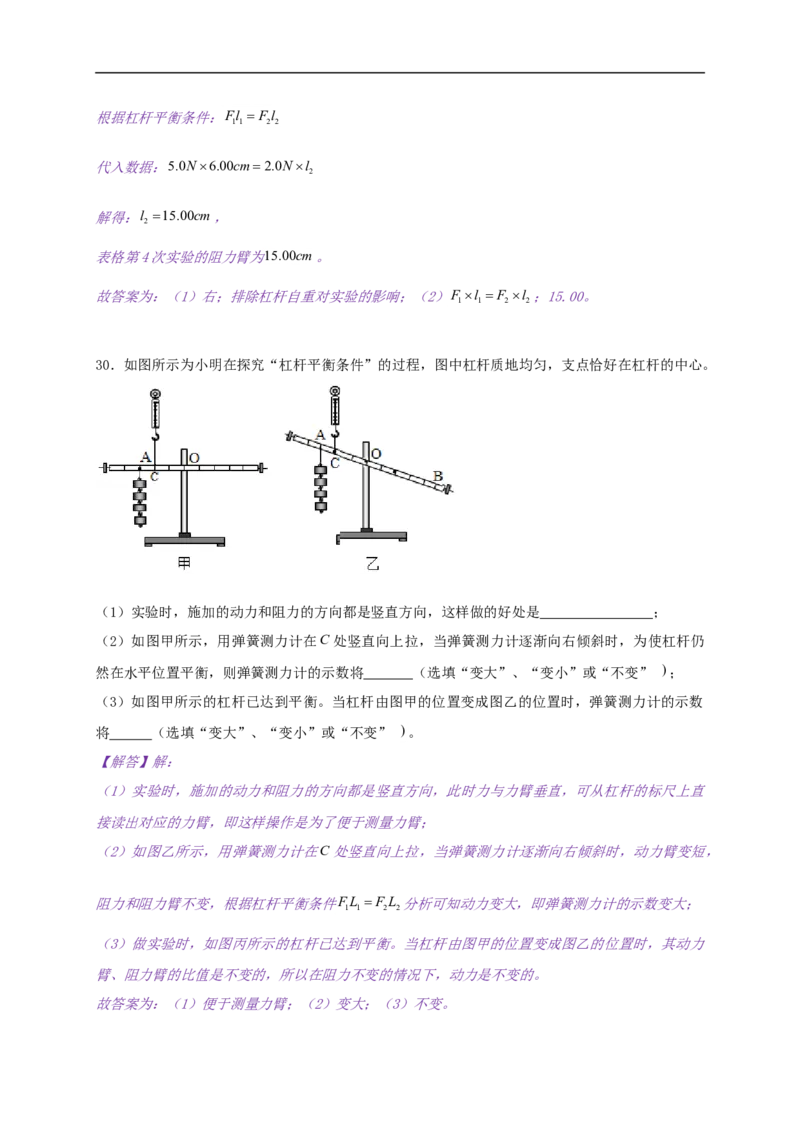
30.如图所示为小明在探究“杠杆平衡条件”的过程,图中杠杆质地均匀,支点恰好在杠杆的中心。
(1)实验时,施加的动力和阻力的方向都是竖直方向,这样做的好处是 ;
(2)如图甲所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,为使杠杆仍
然在水平位置平衡,则弹簧测力计的示数将 (选填“变大”、“变小”或“不变” );
(3)如图甲所示的杠杆已达到平衡。当杠杆由图甲的位置变成图乙的位置时,弹簧测力计的示数
将 (选填“变大”、“变小”或“不变” )。
【解答】解:
(1)实验时,施加的动力和阻力的方向都是竖直方向,此时力与力臂垂直,可从杠杆的标尺上直
接读出对应的力臂,即这样操作是为了便于测量力臂;
(2)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力计逐渐向右倾斜时,动力臂变短,
阻力和阻力臂不变,根据杠杆平衡条件FL F L 分析可知动力变大,即弹簧测力计的示数变大;
1 1 2 2
(3)做实验时,如图丙所示的杠杆已达到平衡。当杠杆由图甲的位置变成图乙的位置时,其动力
臂、阻力臂的比值是不变的,所以在阻力不变的情况下,动力是不变的。
故答案为:(1)便于测量力臂;(2)变大;(3)不变。

