 夜雨聆风
夜雨聆风





图灵系统备份说明
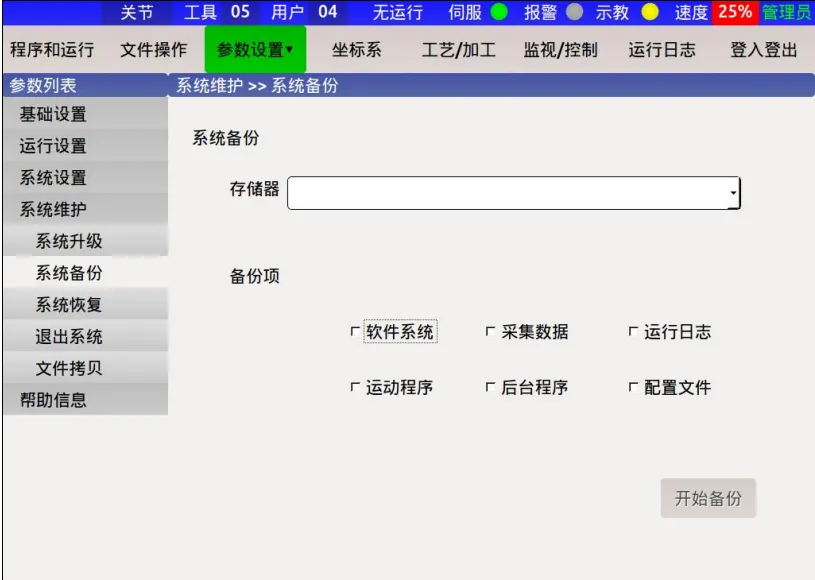
系统备份
若需要备份软件系统,或者有运行上的问题需要厂家协调解决时,一般需要客户提供一些
运行相关的参数,下面就是常用的一些参数备份。
软件系统:机器人正在使用的软件系统。
采集数据:机器人使用过程产生的一些数据,不常用。
运行日志:机器人在运行过程中产生的一些 log,比如机器人的状态信息。
报警信息:调试信息,点位信息,网络通信信息等等。
运动程序:保存的是机器人的前台运行程序。
后台程序:保存的是机器人的后台运行程序。
配置文件:保存的是机器人的配置文件,比如机器人的零点,dh,激活码,视觉跟踪参
数,焊接参数,工具参数,用户参数等等。
选中 U 盘并单击需要备份内容,然后开始备份。备份只会打包文件,不会删除系统原有
文件。
文件拷贝
使用者在正常使用机器人的过程中,可能需要从机器人拷贝文件,或者拷贝文件到机器
人。
如何从机器人拷贝文件到 U 盘
首先将 U 盘插入机器人工控板的 USB 插口,然后选择【参数设置】->【系统维护】->【文
件拷贝】。如下图所示。

左边是机器人的文件夹,每个文件夹对应不同的文件。
backprogram:这个文件夹保存的是后台文件。
collection:这里保存的是收集数据的文件。
configs:这里保存的是机器人的配置文件,其中子文件夹enthercat_x86 是机器人实际运行的配置文件保存的文件夹,子文件夹simulation 是模拟运行机器人时保存的配置文件的文件夹(客户没有版本运行,都是实际运行,配置文件都是保存在 enthercat_x86 下面)。
log:这个文件夹下面保存的是机器人运行日志文件。
motion:这个文件夹下面保存的是机器人的前台文件。
将机器人文件拷贝到U盘。左边的框选择需要拷贝的机器人文件,右边选择需要拷贝到U盘的目录,然后单击箭头,即可将文件拷贝到U盘中。
如何将 U 盘文件拷贝到机器人系统中
左边选择需要拷贝到的目标目录,右边选择需要拷贝的文件,单击箭头,即可将 U 盘文
件拷贝到机器人控制系统中。