

文档内容
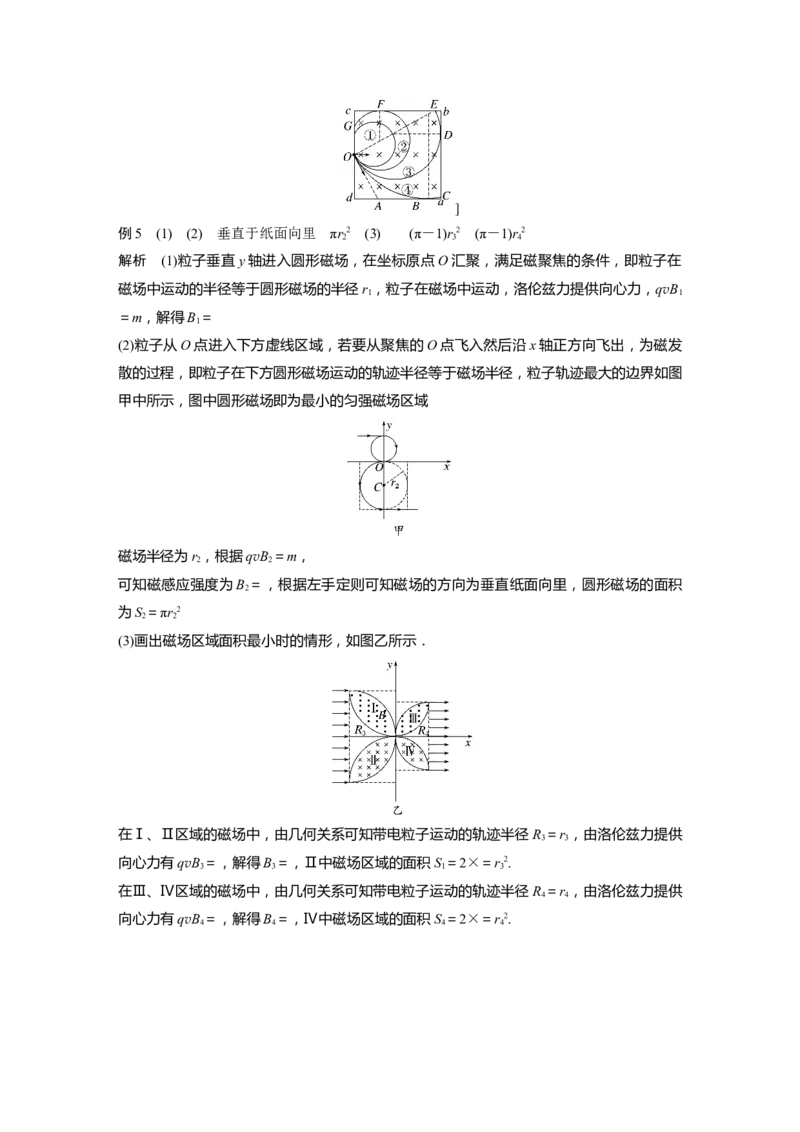
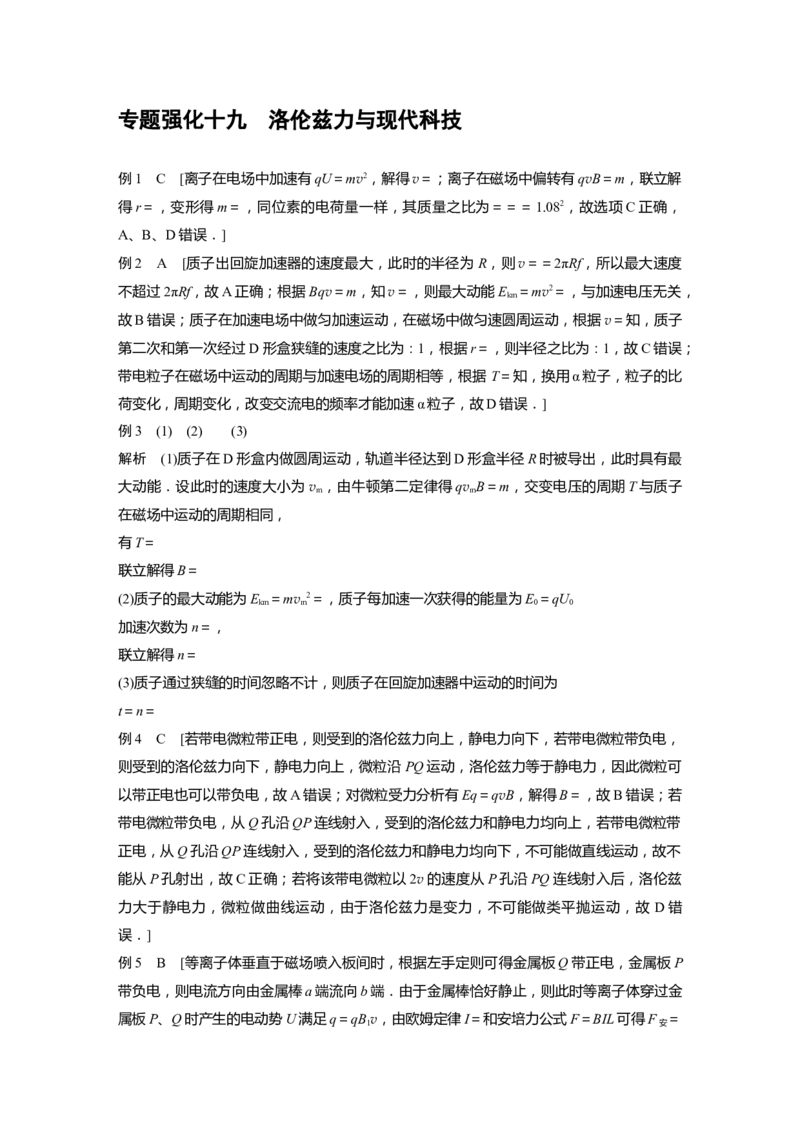
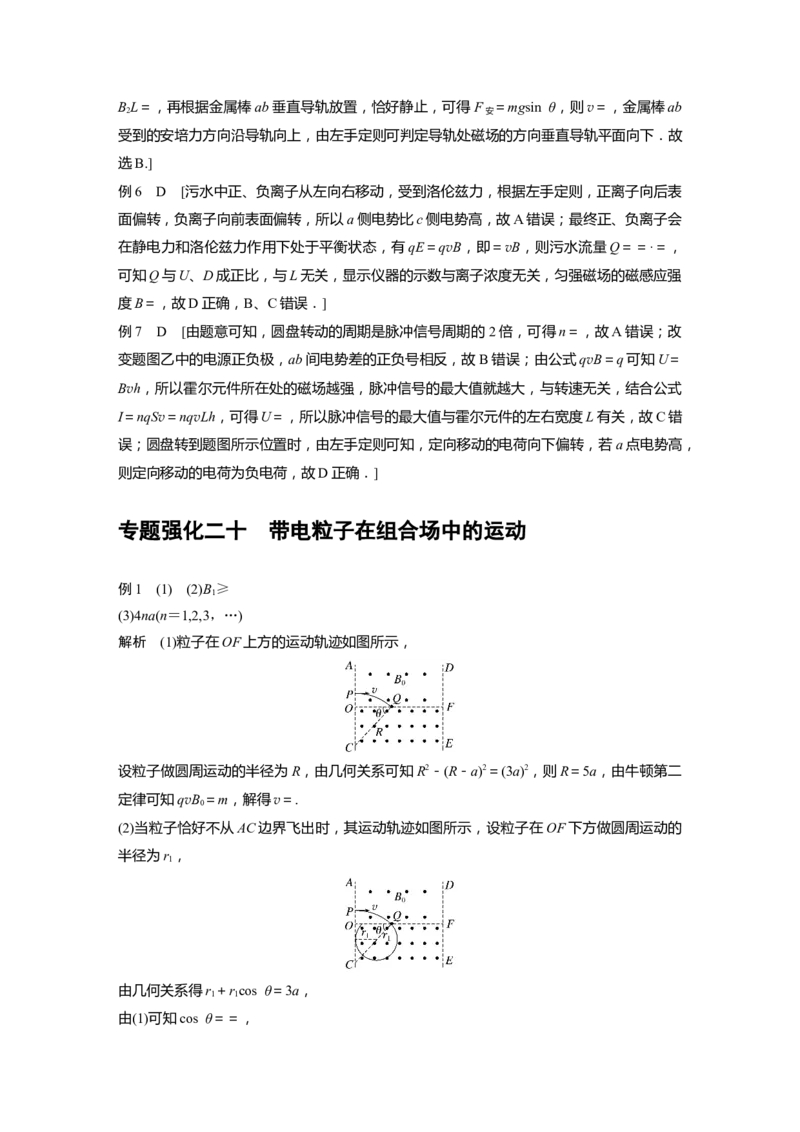
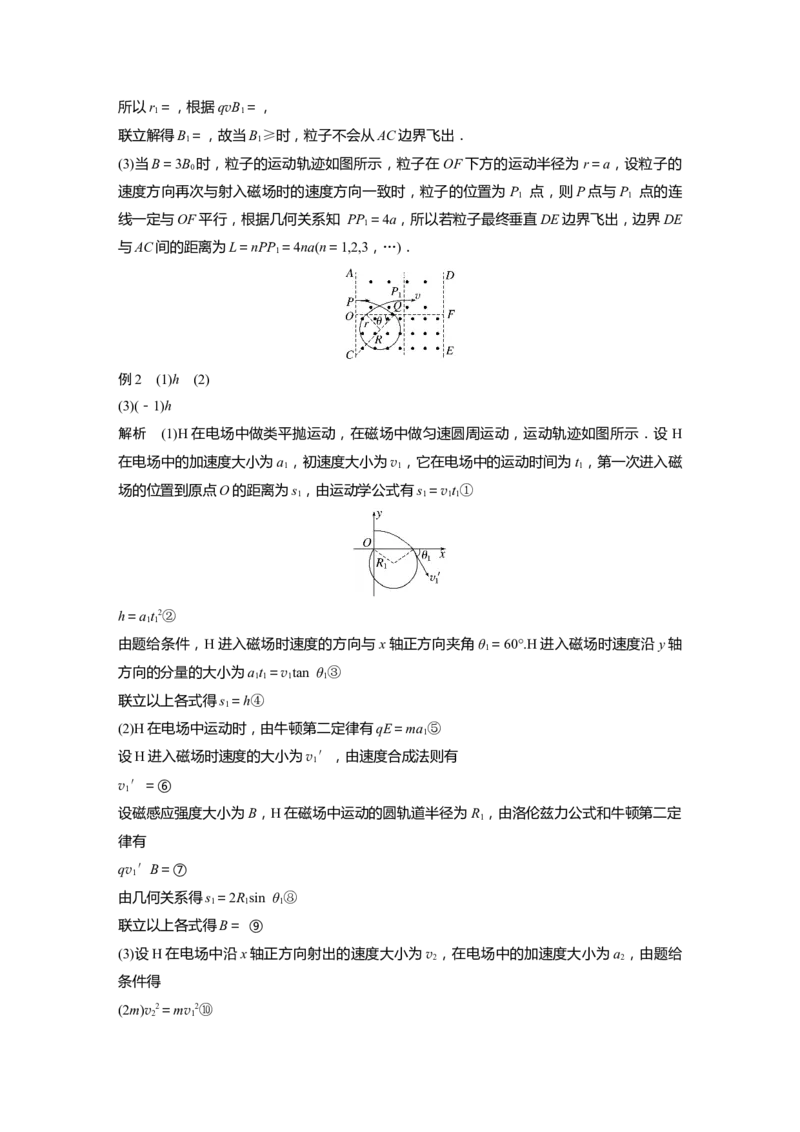
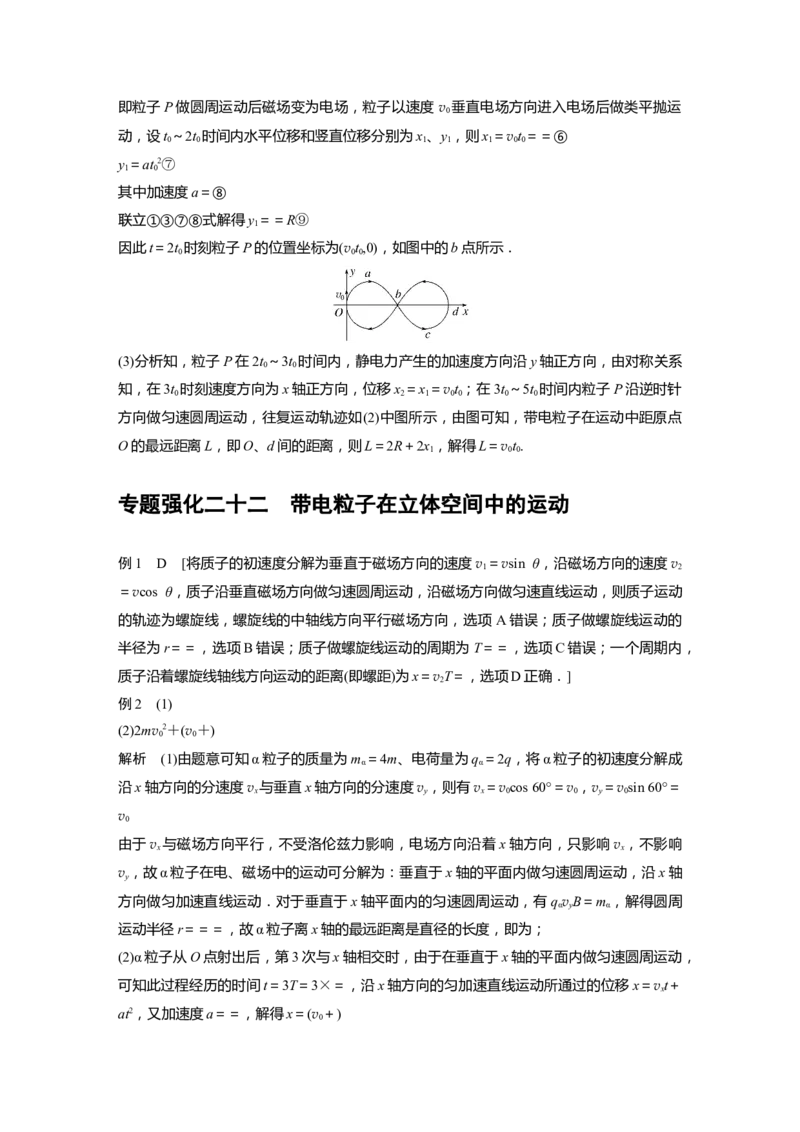
复习讲义答案精析
第一章 运动的描述
匀变速直线运动的研究
第 1 讲 运动的描述
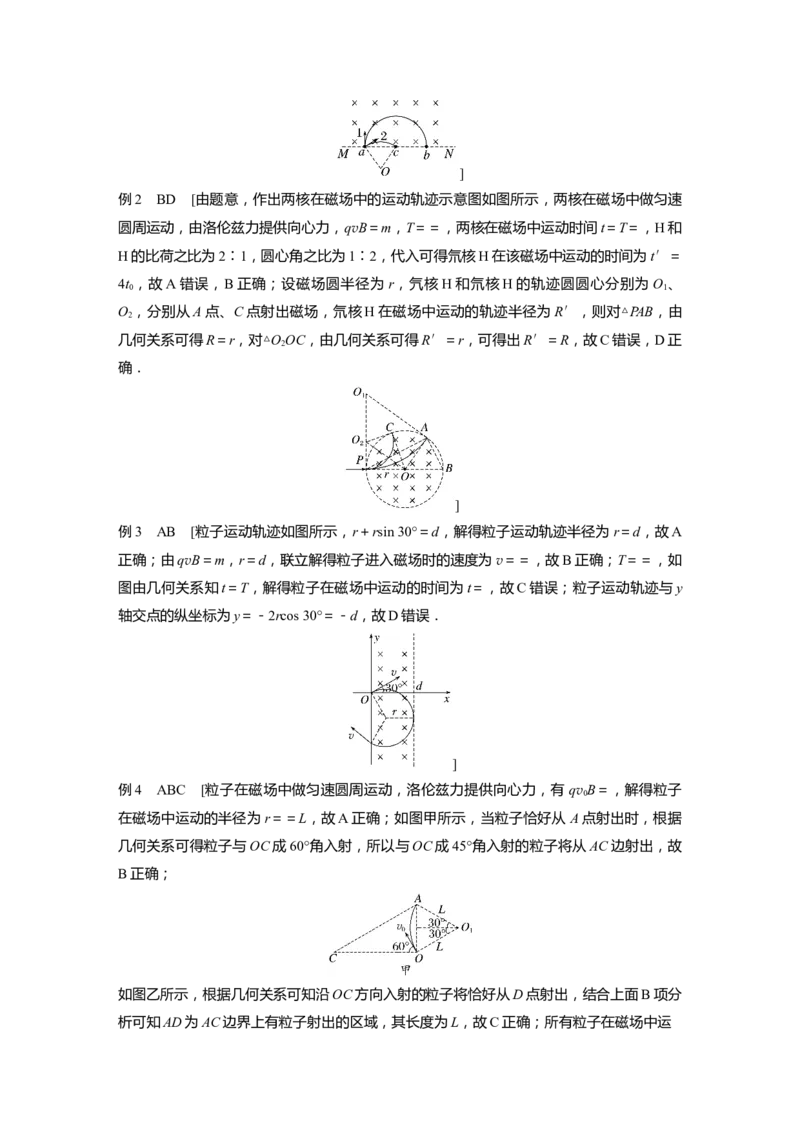
例1 B [研究排球运动员扣球动作、乒乓球运动员的发球技术、羽毛球运动员回击羽毛球
动作时,排球、乒乓球、羽毛球的形状和大小不能忽略,故不可以看成质点,故A、C错误,
B正确;研究体操运动员的平衡木动作时,运动员身体各部分有转动和平动,各部分的速度
不可以视为相同,故D错误.]
例2 D [40 km自行车的运动轨迹不是直线,40 km是指路程,故A错误;8:00整对应
某一瞬间,即为时刻,故B错误;01:52:24对应一段时间,即为时间间隔,故C错误;
研究该选手10 km跑步的时间时,由于该选手的大小和形状可以忽略,所以可以将其看成质
点,故D正确.]
例3 C [根据位移概念可知,该次作业中小车相对地面的位移大小为 x== m=10 m,故
选C.]
例4 B [全长66 km表示路程,故A错误;通过起点和终点的速度均是瞬时速度,故B正
确;因位移未知,故不能求解平均速度,故 C错误;由v=可知,平均速率为 v==132
km/h,大于全程限速100 km/h,该汽车超速,故D错误.]
例5 C [手机计步器记录的行程为该同学在这段时间内行走的路程,即题图中的 6.65公里
指的是路程,故A错误;题图中的速度5.0千米/小时为对应路程与时间之比,即为平均速
率,故C正确,B、D错误.]
例6 C [滑块通过A点时的速度大小为v == cm/s=100 cm/s,故A错误;滑块通过B点
A
时的速度大小为v == cm/s=200 cm/s,故B错误;滑块的加速度大小为a== m/s2=5
B
m/s2,故C正确;滑块在A、B间的平均速度大小为== m/s=1.5 m/s,故D错误.]
例7 B [物体的速度大小不变,加速度也可能不为零,速度的方向可能发生变化,故A错
误;加速度是描述物体速度变化快慢的物理量,只要物体的速度变化快,加速度就大,故 B
正确;物体的速度变化量大,加速度不一定大,还和这一变化所用时间有关,故C错误;当物体速度和加速度反向时,速度减小,加速度也可能增大,故D错误.]
例8 D [规定竖直向下为正方向,v 方向与正方向相同,v 方向与正方向相反,根据加速
1 2
度定义式得a= m/s2=-18.0 m/s2,负号表示与正方向相反,即加速度方向竖直向上,故选
D.]
例9 ABC [物体做变速直线运动,速度方向可能与加速度方向相同,加速度逐渐减小,
速度不断增大,当加速度减小到零时,速度达到最大,而后做匀速直线运动,A正确,D错
误;物体做变速直线运动,速度方向可能与加速度方向相反,加速度逐渐减小,速度不断减
小,当加速度减小到零时,物体速度可能恰好为零,B正确;物体的加速度方向与初速度方
向可能相反,加速度减小,速度减小,当速度减为零,加速度不为零时,物体反向做加速直
线运动,加速度等于零后,物体再做匀速运动,C正确.]
第 2 讲 匀变速直线运动的规律
例1 C [由题知当列车的任一部分处于隧道内时,列车速率都不允许超过v(vs=16 m,说明在离并道对接口16 m的距离上以3 m/s2的加速度加速不
A1
能实现安全超车.
例4 D [若是x-t图像,当甲、乙两车的速度相同时,相对速度为零,距离最远,故A、
B错误;若是v-t图像,因为图像与横轴所围图形面积表示位移,则在 t ~t 时间内,两车
1 2
间的距离不断增大,故C错误,D正确.]
例5 BD [根据v-t图像知,甲、乙两车都沿正方向运动.t=3 s时,甲、乙两车并排行
驶,此时v =30 m/s,v =25 m/s,由v-t图线与时间轴所围“面积”表示位移知,0~3 s
甲 乙
内甲车位移x =×3×30 m=45 m,乙车位移x =×3×(10+25) m=52.5 m,故t=0时,
甲 乙
甲、乙两车相距Δx=x -x =7.5 m,即甲车在乙车前方7.5 m处,选项B正确;0~1 s内,
1 乙 甲
x ′=×1×10 m=5 m,x ′=×1×(10+15) m=12.5 m,Δx=x ′-x ′=7.5 m=Δx,说明
甲 乙 2 乙 甲 1
在t=1 s时甲、乙两车第一次并排行驶,选项A、C错误;甲、乙两车两次并排行驶的位置
之间的距离为x=x -x ′=45 m-5 m=40 m,选项D正确.]
甲 甲
例6 C [由题给图像画出两车的v-t图像如图所示,由图像可知,t=6 s时两车等速,此
时距离最近,图中阴影部分面积表示0~6 s内两车位移之差,即Δx=[×30×3+×30×(6-
3)] m=90 mmg,选项A、B、C错误;由几何关
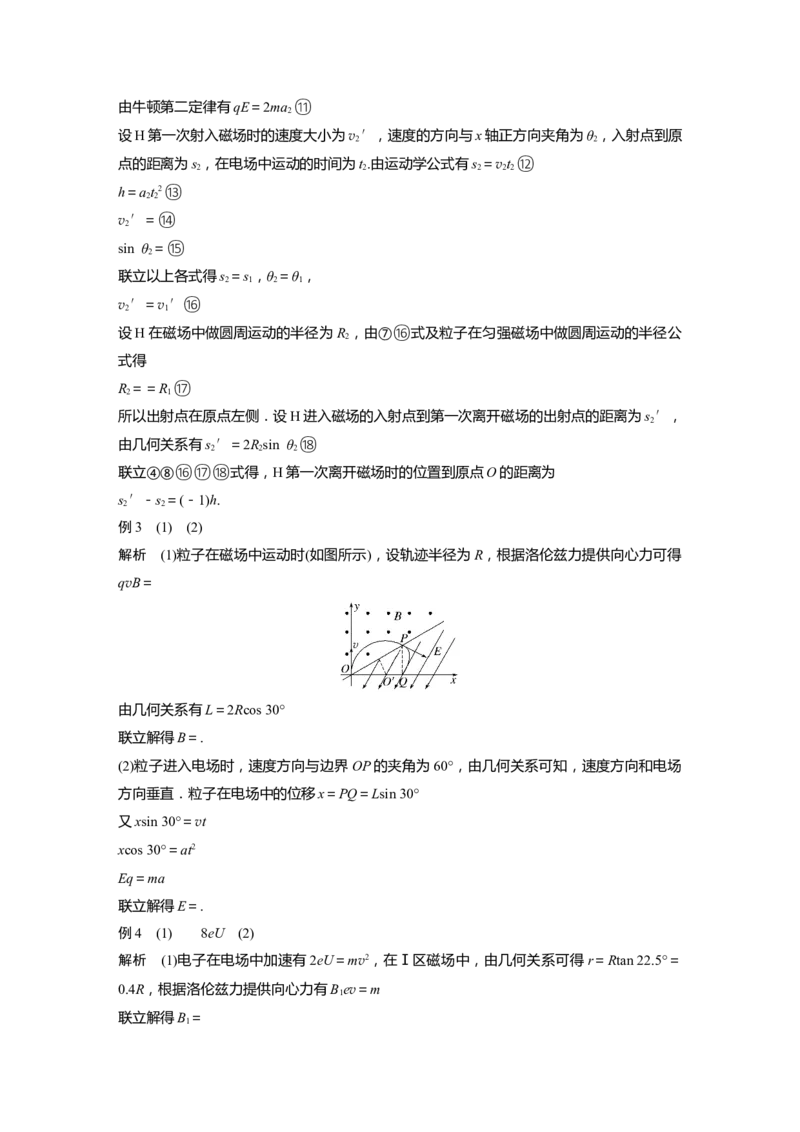
系可知,F=,选项D正确.
]
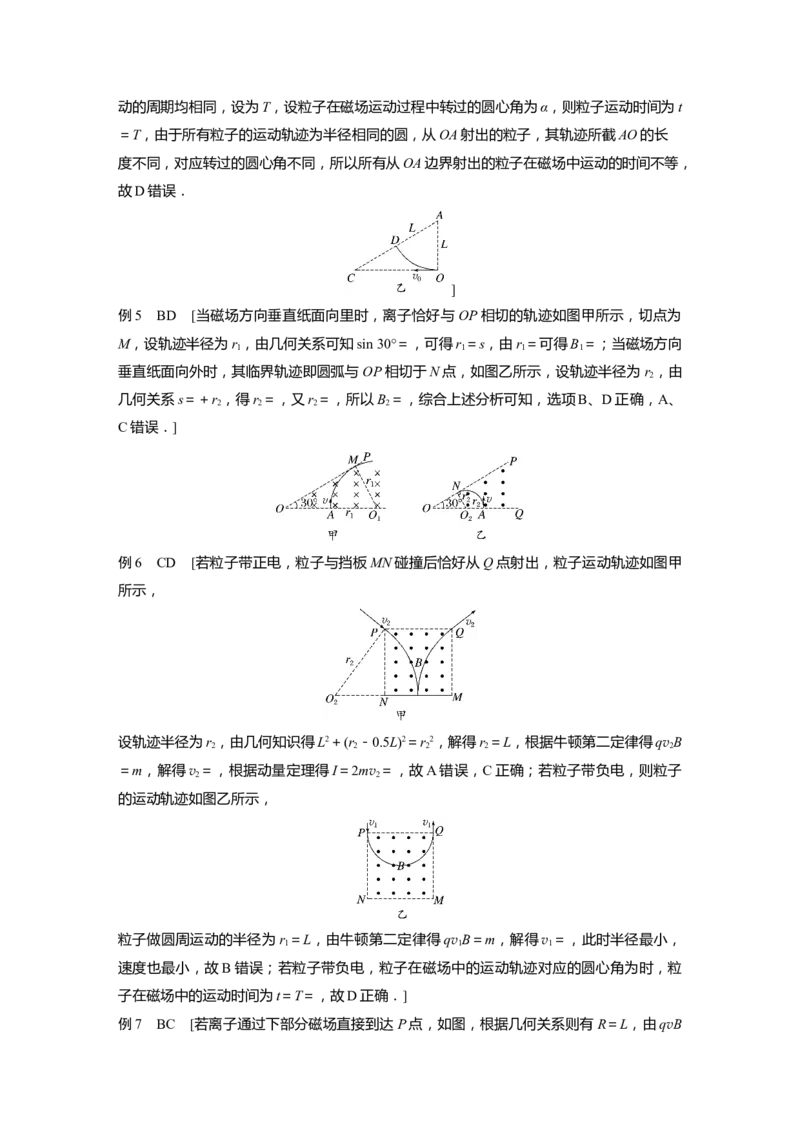
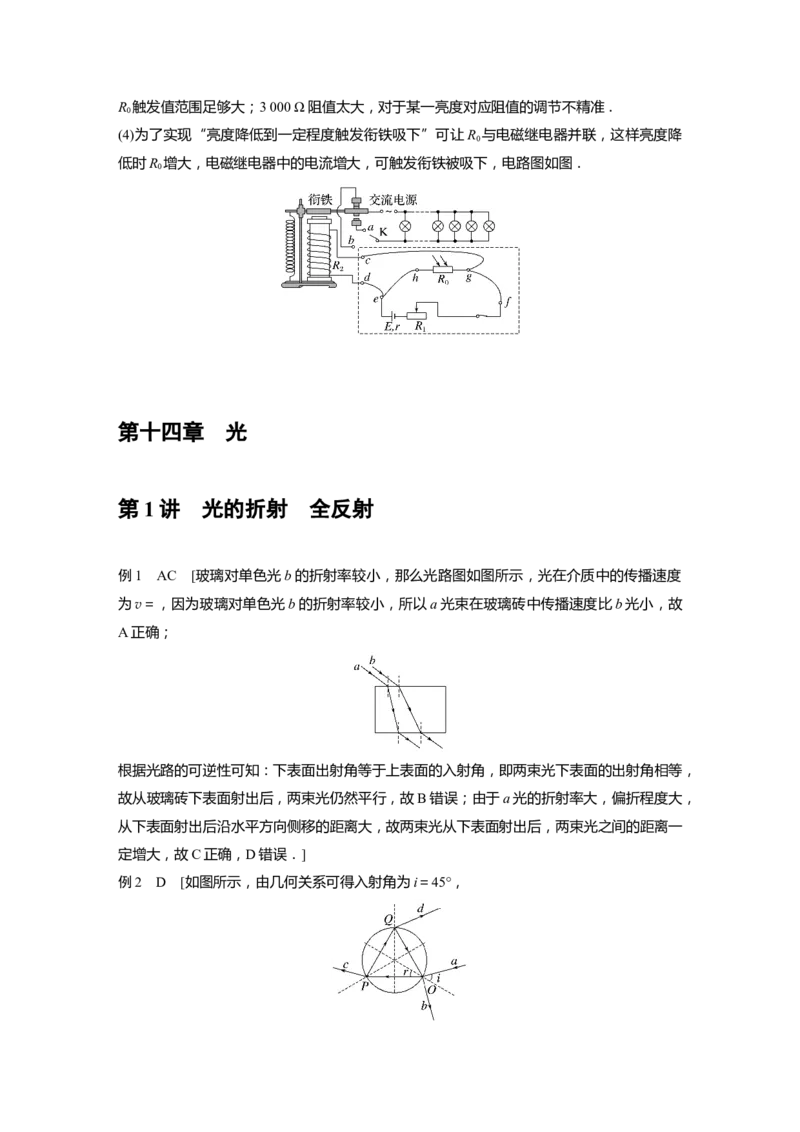
例6 D [由题意知,两根轻弹簧串接在一起,则两弹簧弹力大小相等,根据胡克定律F=kx得,x与k成反比,则得b弹簧的伸长量为,故A、B错误;P端向右移动的距离等于两
根弹簧伸长量之和,即为L+L=(1+)L,故C错误,D正确.]
例7 BD [白纸和镇纸始终处于静止状态,对镇纸受力分析知,镇纸不受摩擦力,否则水
平方向受力不平衡,镇纸的作用是增大白纸与桌面之间的最大静摩擦力,故 A错误;在书
写的过程中毛笔相对纸面向右运动,受到向左的摩擦力,故B正确;白纸与镇纸之间没有
摩擦力,白纸始终处于静止状态,则白纸在水平方向受到毛笔对白纸向右的摩擦力以及桌面
对白纸向左的摩擦力,故C错误;根据牛顿第三定律可知,白纸对桌面的摩擦力向右,故
桌面受到向右的摩擦力,故D正确.]
例8 CD [第1张白纸相对于滚轮的运动趋势与滚轮的运动方向相反,则受到滚轮的静摩
擦力方向与滚轮的运动方向相同,即受到滚轮的摩擦力向右,A错误;对除第1张白纸外的
所有白纸进行研究,处于静止状态,水平方向受到第1张白纸的滑动摩擦力,方向与滚轮的
运动方向相同,则根据平衡条件知,最后1张白纸受到纸槽底座的摩擦力方向与滚轮的运动
方向相反,即水平向左,B错误;根据题意,因上一张白纸相对下一张白纸向右滑动或有向
右滑动的趋势,则上一张白纸受到下一张白纸的摩擦力一定向左,那么下一张白纸受到上一
张白纸的摩擦力一定向右,C正确;正常情况下单张纸打印必须满足滚轮与白纸之间的滑动
摩擦力大于纸与纸之间的滑动摩擦力,则μ>μ,D正确.]
1 2
例9 A [需用约1 N的拉力克服最大静摩擦力,A4纸受正反两面的两个摩擦力,不计书
皮及A4纸的质量,有1 N=2μn=2×μ××106 (N),解得μ≈0.33,故选A.]
1
例10 (1)8 N 水平向右 (2)24 N 水平向左 (3)40 N
解析 (1)物块Q所受到的滑动摩擦力的大小F =μF =μG =0.4×20 N=8 N
f1 NQ Q
方向水平向右.
(2)物块P所受桌面的滑动摩擦力的大小F =μF =μ(G +G )=0.4×(40+20) N=24 N
f2 NP P Q
方向水平向左.
(3)设跨过定滑轮的轻绳拉力大小为F ,对物块Q,由平衡条件得F =F =8 N
T T f1
对物块P受力分析,P水平方向受到向右的拉力F、向左的轻绳拉力F 、Q对P向左的摩擦
T
力F ′及桌面对P向左的摩擦力F ,根据平衡条件,有F=F ′+F +F =8 N+24 N+8
f1 f2 f1 f2 T
N=40 N.
第 2 讲 摩擦力的综合分析
例1 BD [A物体与传送带一起匀速运动,它们之间无相对运动或相对运动趋势,即无摩
擦力作用,故A错误;B、C两物体虽运动方向不同,但都处于平衡状态,由沿传送带方向
所受合力为零可知,B、C两物体均受沿传送带方向向上的摩擦力作用,故B正确,C错误;若传送带突然加速,根据牛顿第二定律,可知A受到向右的摩擦力作用,故D正确.]
例2 BD [对题图甲:设物块m受到重力、支持力、摩擦力的作用,而重力与支持力平衡,
若受到摩擦力作用,其方向与接触面相切,方向水平,则物块 m受力将不平衡,与题中条
件矛盾,故假设不成立,A、C错误;对题图乙:设物块m不受摩擦力,由于m匀速下滑,
m必受力平衡,若m只受重力、支持力作用,由于支持力与接触面垂直,故重力、支持力
不可能平衡,则假设不成立,由受力分析知:m受到与斜面平行向上的摩擦力,B、D正
确.]
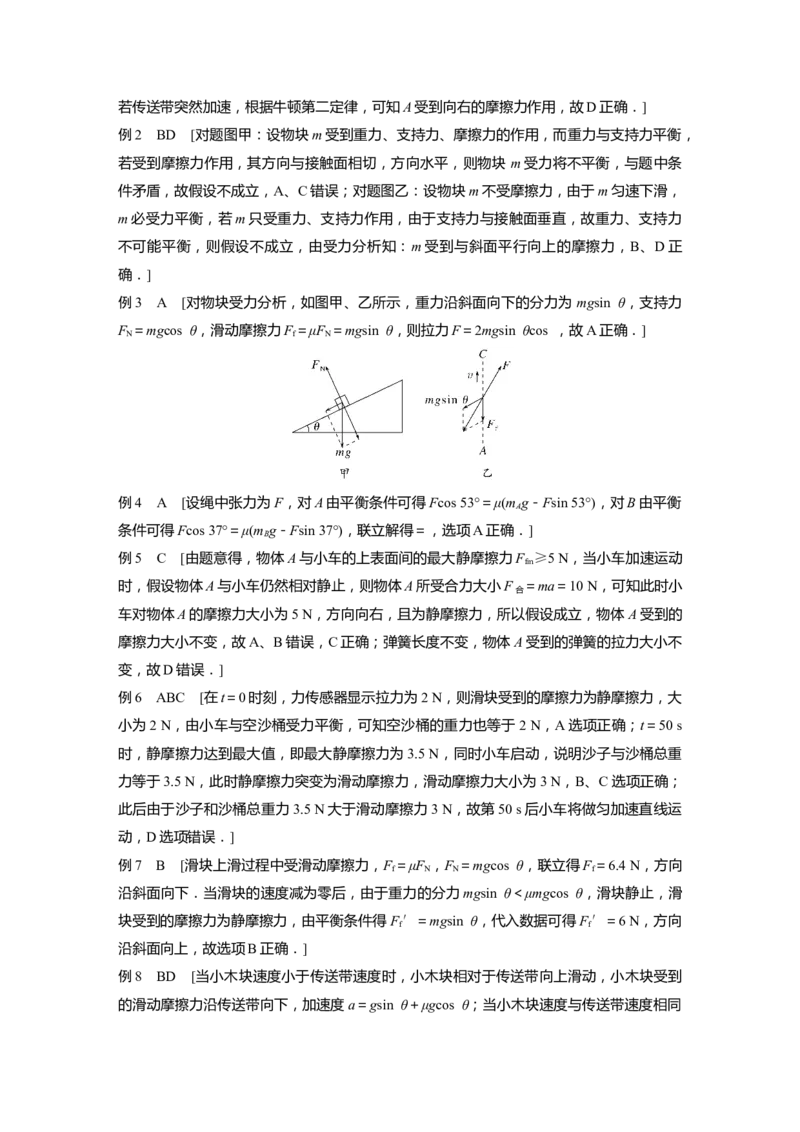
例3 A [对物块受力分析,如图甲、乙所示,重力沿斜面向下的分力为 mgsin θ,支持力
F =mgcos θ,滑动摩擦力F=μF =mgsin θ,则拉力F=2mgsin θcos ,故A正确.]
N f N
例4 A [设绳中张力为F,对A由平衡条件可得Fcos 53°=μ(m g-Fsin 53°),对B由平衡
A
条件可得Fcos 37°=μ(m g-Fsin 37°),联立解得=,选项A正确.]
B
例5 C [由题意得,物体A与小车的上表面间的最大静摩擦力F ≥5 N,当小车加速运动
fm
时,假设物体A与小车仍然相对静止,则物体A所受合力大小F =ma=10 N,可知此时小
合
车对物体A的摩擦力大小为5 N,方向向右,且为静摩擦力,所以假设成立,物体A受到的
摩擦力大小不变,故A、B错误,C正确;弹簧长度不变,物体A受到的弹簧的拉力大小不
变,故D错误.]
例6 ABC [在t=0时刻,力传感器显示拉力为2 N,则滑块受到的摩擦力为静摩擦力,大
小为2 N,由小车与空沙桶受力平衡,可知空沙桶的重力也等于2 N,A选项正确;t=50 s
时,静摩擦力达到最大值,即最大静摩擦力为3.5 N,同时小车启动,说明沙子与沙桶总重
力等于3.5 N,此时静摩擦力突变为滑动摩擦力,滑动摩擦力大小为3 N,B、C选项正确;
此后由于沙子和沙桶总重力3.5 N大于滑动摩擦力3 N,故第50 s后小车将做匀加速直线运
动,D选项错误.]
例7 B [滑块上滑过程中受滑动摩擦力,F=μF ,F =mgcos θ,联立得F=6.4 N,方向
f N N f
沿斜面向下.当滑块的速度减为零后,由于重力的分力mgsin θ<μmgcos θ,滑块静止,滑
块受到的摩擦力为静摩擦力,由平衡条件得F′=mgsin θ,代入数据可得F′=6 N,方向
f f
沿斜面向上,故选项B正确.]
例8 BD [当小木块速度小于传送带速度时,小木块相对于传送带向上滑动,小木块受到
的滑动摩擦力沿传送带向下,加速度a=gsin θ+μgcos θ;当小木块速度与传送带速度相同时,由于μβ,故F F,又因
B A为两绳承受的最大拉力相等,故当向球内不断注入铁砂时,BO绳先断,选项B正确.]
例8 D [题图甲中是一根绳跨过光滑定滑轮,绳中的弹力大小相等,两段绳的拉力大小都
是mg,互成120°角,则合力的大小是mg,方向与竖直方向成60°角斜向左下方,故BC对
1 1
滑轮的作用力大小也是mg,方向与竖直方向成60°角斜向右上方,A选项错误;题图乙中
1
HG杆受到绳的作用力大小为mg,B选项错误;题图乙中F sin 30°=mg,得F =2mg,
2 EG 2 EG 2
则=,C选项错误,D选项正确.]
第 4 讲 牛顿第三定律 共点力平衡
例1 BD [甲对乙的拉力与乙对甲的拉力是一对作用力与反作用力,大小相等,与二者的
运动状态无关,即不管哪个获胜,甲对乙的拉力大小始终等于乙对甲的拉力大小,当地面对
甲的摩擦力大于地面对乙的摩擦力时,甲才能获胜,故A、C错误,B、D正确.]
例2 D [对男、女演员整体分析,根据平衡条件可知,水平地面对女演员的摩擦力为零,
水平地面对女演员的支持力与男、女演员重力之和是一对平衡力,故A、B错误;女演员对
男演员的作用力与男演员对女演员的作用力是一对相互作用力,根据牛顿第三定律可知,女
演员对男演员的作用力与男演员对女演员的作用力大小相等、方向相反,故C错误;对男
演员分析,根据平衡条件得,女演员对男演员的作用力大小等于男演员所受重力大小,故D
正确.]
例3 A [环在竖直方向上受重力及箱子内的杆对它的竖直向上的摩擦力F,受力情况如图
f
甲所示,根据牛顿第三定律,环应给杆一个竖直向下的摩擦力F′,故箱子竖直方向上受重
f
力Mg、地面对它的支持力F 及环给它的摩擦力F′,受力情况如图乙所示.以环为研究对
N f
象,有mg-F=ma,以箱子和杆整体为研究对象,有F =F′+Mg=F+Mg=Mg+mg-
f N f f
ma.根据牛顿第三定律,箱子对地面的压力大小等于地面对箱子的支持力大小,即 F ′=
N
Mg+mg-ma,故选项A正确.]
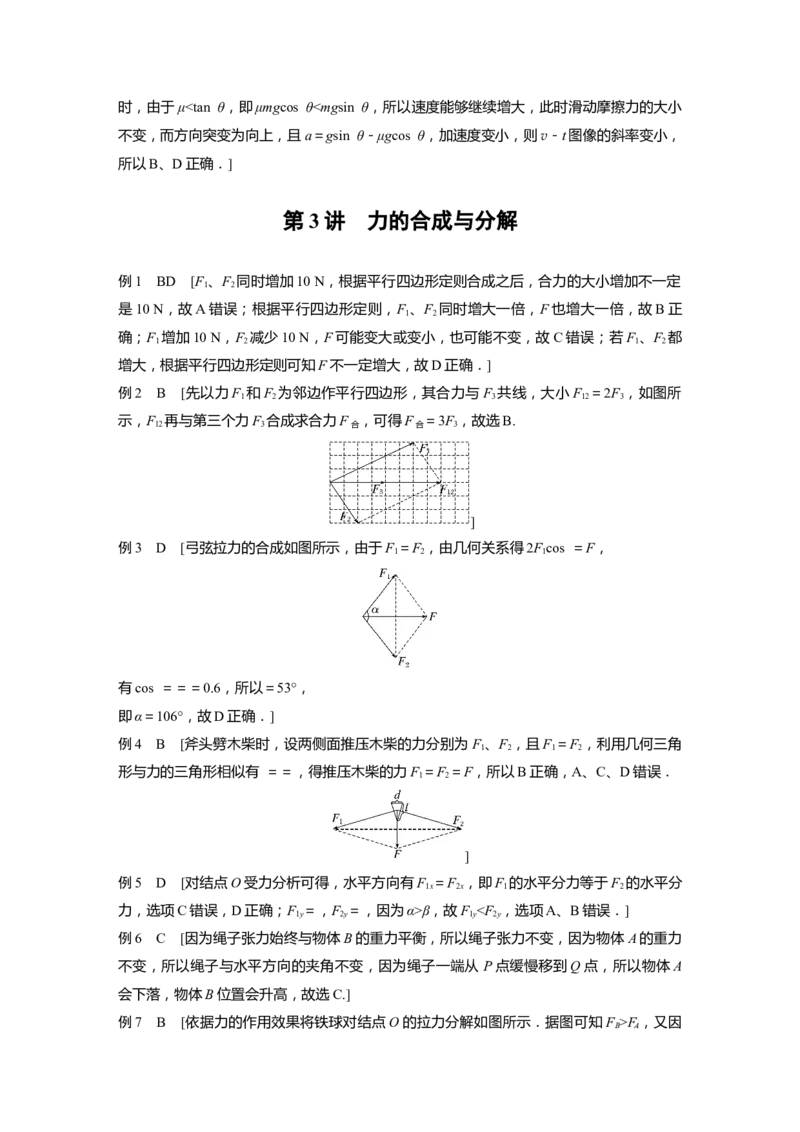
例4 AD [由题可知,A、B均处于平衡状态,对A、B整体受力分析,如图甲所示,受到
向下的重力和向上的推力F,由平衡条件可知B与墙壁之间不可能有弹力,因此也不可能有
摩擦力,C错误;对B受力分析,如图乙所示,受到重力、A对B的弹力及摩擦力,故B受到三个力,B错误;对A受力分析,如图丙所示,受到重力、推力、B对A的弹力和摩擦力,
共四个力,A、D正确.]
例5 C [对a和b受力分析可知,a可能受重力、杆的支持力、绳的拉力3个力的作用,
可能还受摩擦力共4个力的作用,b受重力、绳的拉力2个力或重力、绳的拉力、杆的支持
力、摩擦力4个力的作用,选项A、B错误;对b受力分析可知,b受绳子拉力大小可能等
于mg,因此绳子对a的拉力大小可能等于mg,选项C正确;对a受力分析,如果a、b所
受摩擦力均为零,则由Gsin θ=mgcos θ可得G=,即m=,选项D错误.]
a a a
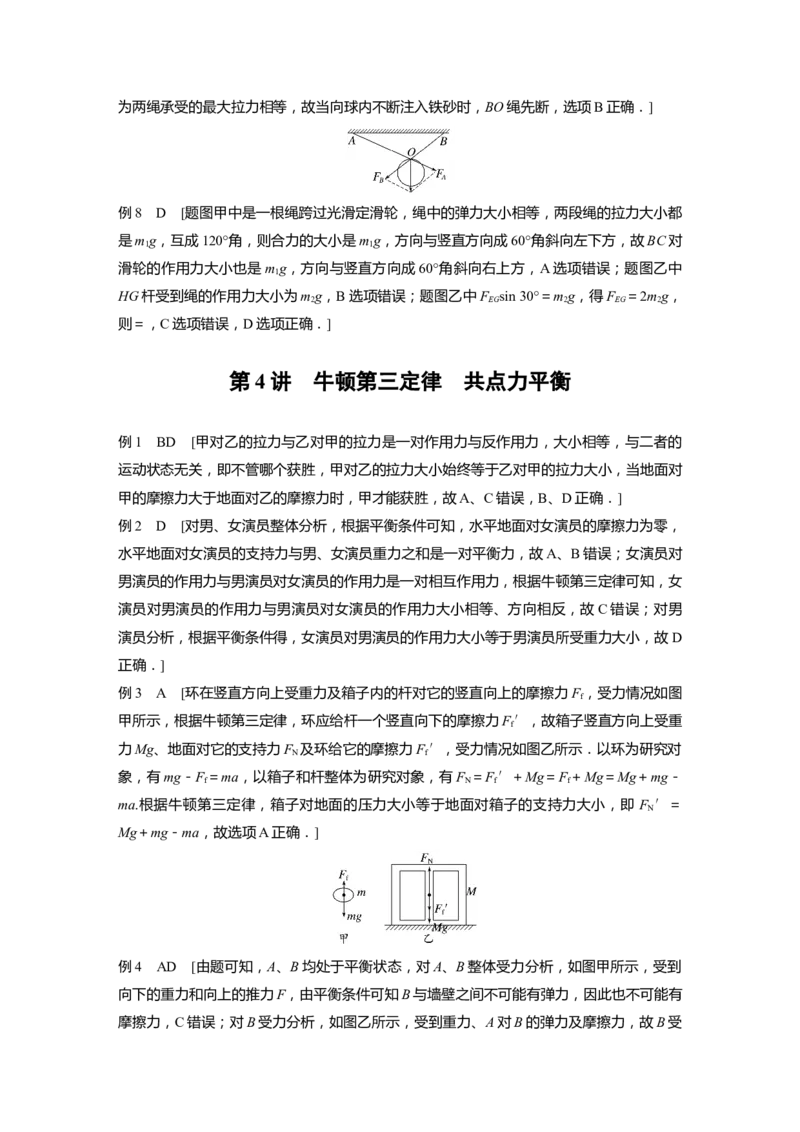
例6 B [取O点为研究对象,O点在三力的作用下处于平衡状态,对其受力分析如图所示,
F =F ,两力的合力与F等大反向,根据几何关系可得2β+α=180°,所以β=55°,故选
T1 T2
B. ]
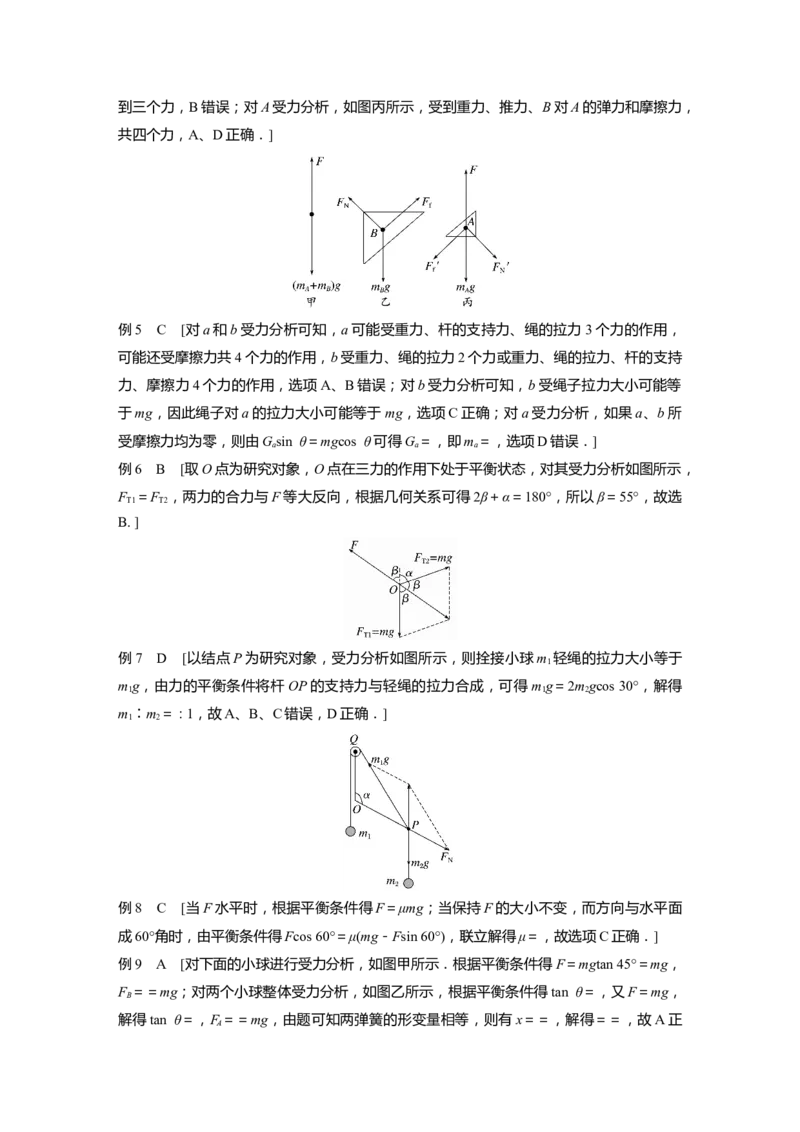
例7 D [以结点P为研究对象,受力分析如图所示,则拴接小球m 轻绳的拉力大小等于
1
mg,由力的平衡条件将杆OP的支持力与轻绳的拉力合成,可得 mg=2mgcos 30°,解得
1 1 2
m∶m=∶1,故A、B、C错误,D正确.]
1 2
例8 C [当F水平时,根据平衡条件得F=μmg;当保持F的大小不变,而方向与水平面
成60°角时,由平衡条件得Fcos 60°=μ(mg-Fsin 60°),联立解得μ=,故选项C正确.]
例9 A [对下面的小球进行受力分析,如图甲所示.根据平衡条件得 F=mgtan 45°=mg,
F ==mg;对两个小球整体受力分析,如图乙所示,根据平衡条件得tan θ=,又F=mg,
B
解得tan θ=,F==mg,由题可知两弹簧的形变量相等,则有x==,解得==,故A正
A确,B、C、D错误.]
专题强化三 动态平衡问题 平衡中的临界、极值问题
例1 AD [以球B为研究对象,受力分析如图所示,可得出F =Gtan θ,F =,当A向右
1 2
移动少许后,θ减小,则F 减小,F 减小,故A、D正确.]
1 2
例2 BC [对小球受力分析知,小球受到重力mg、斜面的支持力F 和挡板的弹力F ,如
N1 N2
图,当挡板绕O点逆时针缓慢地转向水平位置的过程中,小球所受的合力为零,根据平衡
条件得知,F 和F 的合力与重力mg大小相等、方向相反,作出小球在三个不同位置力的
N1 N2
受力分析图,由图看出,斜面对小球的支持力F 逐渐减小,挡板对小球的弹力F 先减小
N1 N2
后增大,当F 和F 垂直时,弹力F 最小,故选项B、C正确,A、D错误.]
N1 N2 N2
例3 A [受力分析如图所示,力三角形与几何三角形(△OOO )相似,则有==,因为
2 1
OO 、OO 长度不变,故F 大小不变,OO 长度变短,故F变小,故A正确,B、C、D错
2 1 1 N 2
误.]
例4 AD [以重物为研究对象分析受力情况,受重力mg、OM绳上拉力F 、MN上拉力
2
F ,由题意知,三个力的合力始终为零,矢量三角形如图所示,F 、F 的夹角不变,在F
1 1 2 2
转至水平的过程中,矢量三角形在同一外接圆上,由图可知,MN上的张力F 逐渐增大,
1OM上的张力F 先增大后减小,所以A、D正确,B、C错误.]
2
例5 A [对滑轮受力分析如图甲所示,由于跨过滑轮的绳子拉力一定相等,即F =F ,由
1 2
几何关系易知绳子拉力方向与竖直方向夹角相等,设为θ,可知
F=F=①
1 2
如图乙所示,设绳长为L,
由几何关系得sin θ=②
其中d为两端点间的水平距离,由B点向C点移动过程中,d先变大后不变,因此θ先变大
后不变,由①式可知绳中拉力先变大后不变,故A正确.]
例6 N≤F≤ N
解析 设AB绳的拉力为F ,AC绳的拉力为F ,对物体受力分析,由平衡条件有Fcos θ-
1 2
F-Fcos θ=0,
2 1
Fsin θ+Fsin θ-mg=0,
1
可得F=-F,
1
F=+.
若要使两绳都能伸直,
则有F≥0,F≥0,则F的最大值
1 2
F == N,
max
F的最小值F == N,
min
即拉力F的大小范围为 N≤F≤ N.
例7 2 N
解析 设拉力与水平方向夹角为θ,根据平衡条件有Fcos θ=μ(mg-Fsin θ),整理得cos θ
+μsin θ=,sin(α+θ)=(其中sin α=),当θ=-α时F最小,故所需拉力F的最小值F =
min
=2 N.实验二 探究弹簧弹力与形变量的关系
例1 (1)刻度尺 (2)弹簧原长、弹簧所受外力与弹簧对应的长度 (3)200
弹簧自身重力的影响 (4)CBDAEFG
解析 (1)根据实验原理可知还需要刻度尺来测量弹簧原长和挂上钩码后的长度.
(2)根据实验原理,实验中需要测量的物理量有弹簧的原长、弹簧所受外力与弹簧对应的长
度.
(3)取题图乙中(0.5 cm,0)和(3.5 cm,6 N)两个点,代入ΔF=kΔx,解得k=200 N/m,由于弹
簧自身的重力影响,使得实验中弹簧不加外力时就有形变量.
(4)根据实验操作的合理性可知,实验步骤的先后顺序为CBDAEFG.
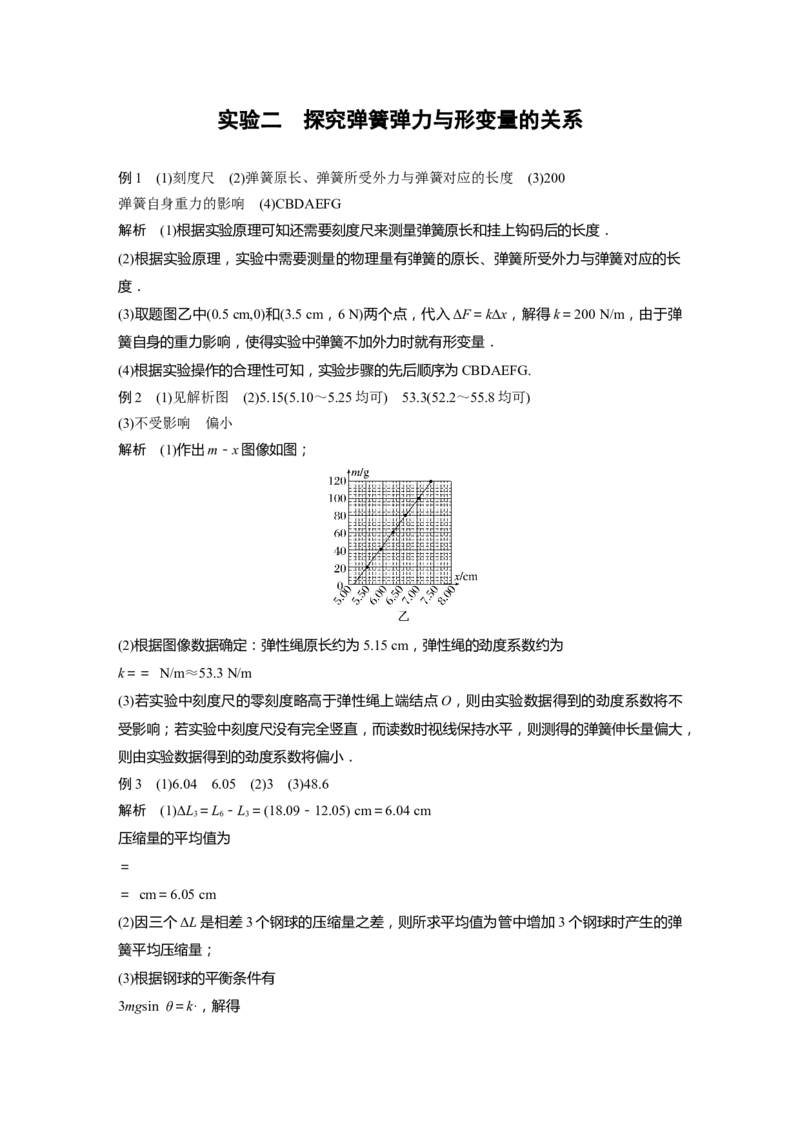
例2 (1)见解析图 (2)5.15(5.10~5.25均可) 53.3(52.2~55.8均可)
(3)不受影响 偏小
解析 (1)作出m-x图像如图;
(2)根据图像数据确定:弹性绳原长约为5.15 cm,弹性绳的劲度系数约为
k== N/m≈53.3 N/m
(3)若实验中刻度尺的零刻度略高于弹性绳上端结点O,则由实验数据得到的劲度系数将不
受影响;若实验中刻度尺没有完全竖直,而读数时视线保持水平,则测得的弹簧伸长量偏大,
则由实验数据得到的劲度系数将偏小.
例3 (1)6.04 6.05 (2)3 (3)48.6
解析 (1)ΔL=L-L=(18.09-12.05) cm=6.04 cm
3 6 3
压缩量的平均值为
=
= cm=6.05 cm
(2)因三个ΔL是相差3个钢球的压缩量之差,则所求平均值为管中增加3个钢球时产生的弹
簧平均压缩量;
(3)根据钢球的平衡条件有
3mgsin θ=k·,解得k==
N/m
≈48.6 N/m.
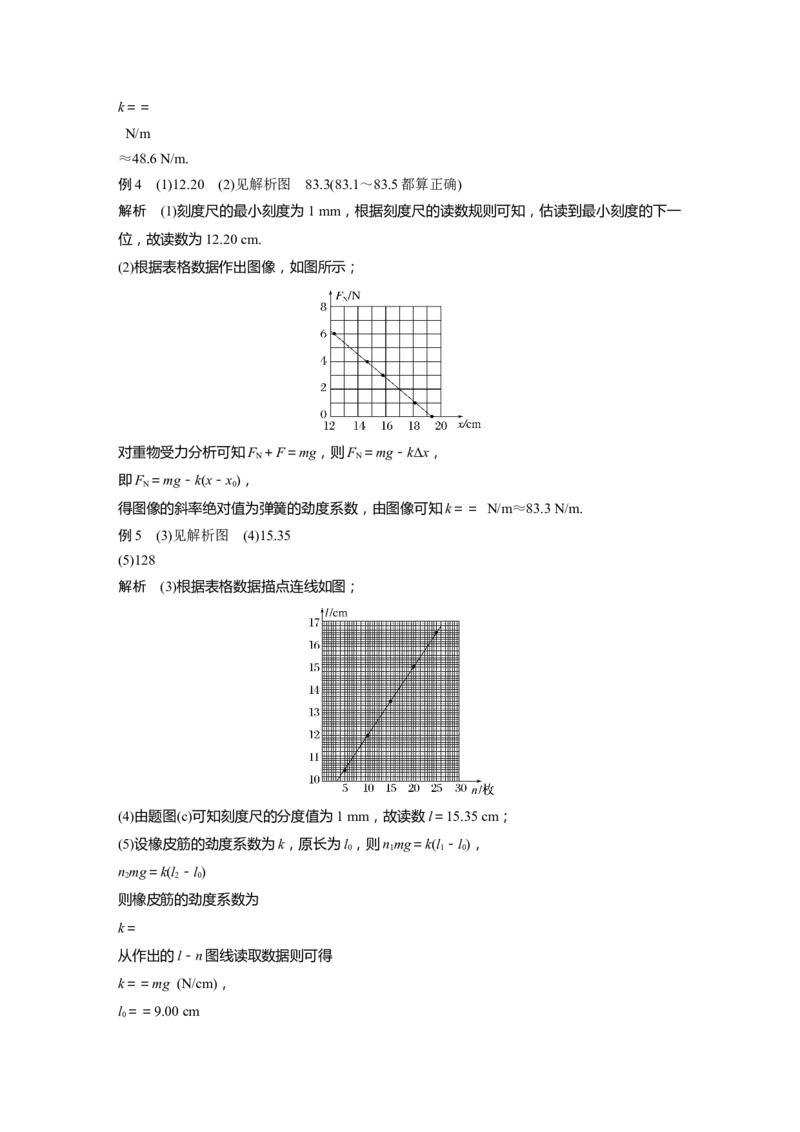
例4 (1)12.20 (2)见解析图 83.3(83.1~83.5都算正确)
解析 (1)刻度尺的最小刻度为1 mm,根据刻度尺的读数规则可知,估读到最小刻度的下一
位,故读数为12.20 cm.
(2)根据表格数据作出图像,如图所示;
对重物受力分析可知F +F=mg,则F =mg-kΔx,
N N
即F =mg-k(x-x),
N 0
得图像的斜率绝对值为弹簧的劲度系数,由图像可知k== N/m≈83.3 N/m.
例5 (3)见解析图 (4)15.35
(5)128
解析 (3)根据表格数据描点连线如图;
(4)由题图(c)可知刻度尺的分度值为1 mm,故读数l=15.35 cm;
(5)设橡皮筋的劲度系数为k,原长为l,则nmg=k(l-l),
0 1 1 0
nmg=k(l-l)
2 2 0
则橡皮筋的劲度系数为
k=
从作出的l-n图线读取数据则可得
k==mg (N/cm),
l==9.00 cm
0设冰墩墩的质量为m,
1
则有mg=k(l-l)
1 0
可得m=×6.05×(15.35-9.00) g≈128 g.
1
例6 (1)①81.7 ②0.012 2
(2)见解析图
(3)
(~均可)
(~均可)
解析 (1)①k==
N/m
≈81.7 N/m;
②= m/N≈0.012 2 m/N;
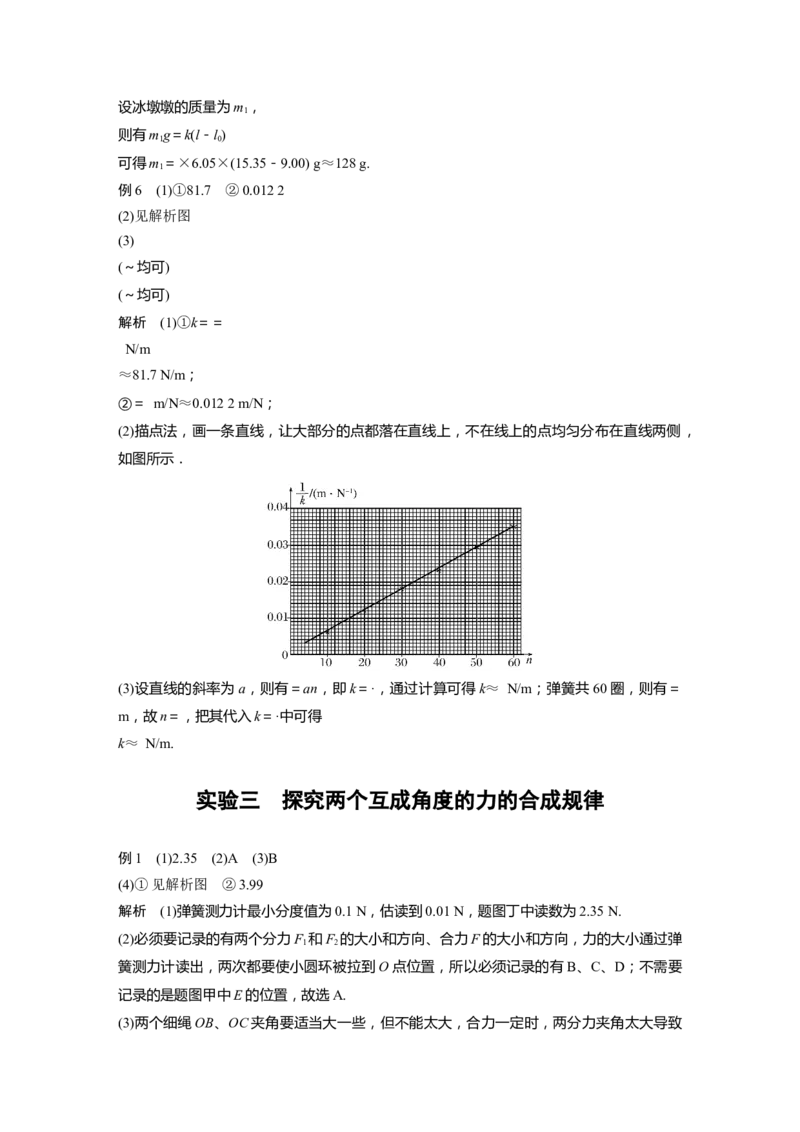
(2)描点法,画一条直线,让大部分的点都落在直线上,不在线上的点均匀分布在直线两侧,
如图所示.
(3)设直线的斜率为a,则有=an,即k=·,通过计算可得k≈ N/m;弹簧共60圈,则有=
m,故n=,把其代入k=·中可得
k≈ N/m.
实验三 探究两个互成角度的力的合成规律
例1 (1)2.35 (2)A (3)B
(4)①见解析图 ②3.99
解析 (1)弹簧测力计最小分度值为0.1 N,估读到0.01 N,题图丁中读数为2.35 N.
(2)必须要记录的有两个分力F 和F 的大小和方向、合力F的大小和方向,力的大小通过弹
1 2
簧测力计读出,两次都要使小圆环被拉到O点位置,所以必须记录的有B、C、D;不需要
记录的是题图甲中E的位置,故选A.
(3)两个细绳OB、OC夹角要适当大一些,但不能太大,合力一定时,两分力夹角太大导致两分力太大,测量误差变大,A错误;读数时,视线应正对弹簧测力计的刻度,规范操作,
B正确;实验时,不仅需保证两次橡皮筋伸长量相同,还必须都是沿竖直方向伸长至O点才
行,C错误.
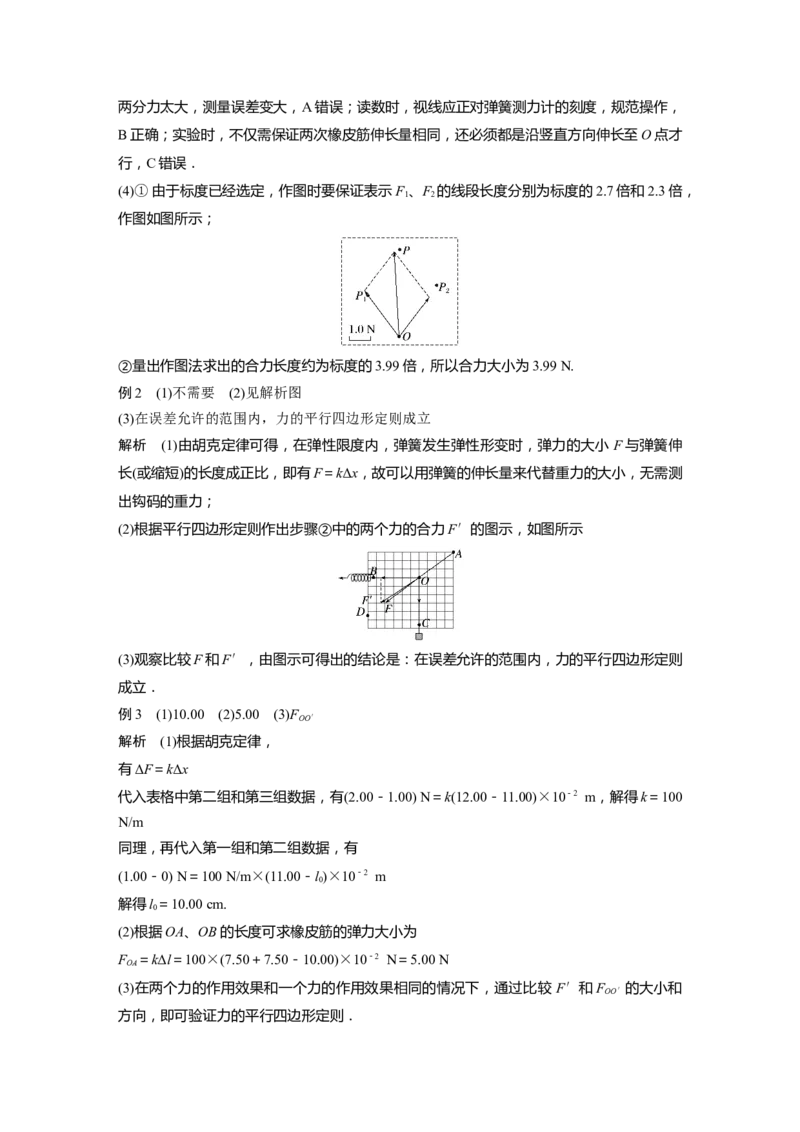
(4)①由于标度已经选定,作图时要保证表示F 、F 的线段长度分别为标度的2.7倍和2.3倍,
1 2
作图如图所示;
②量出作图法求出的合力长度约为标度的3.99倍,所以合力大小为3.99 N.
例2 (1)不需要 (2)见解析图
(3)在误差允许的范围内,力的平行四边形定则成立
解析 (1)由胡克定律可得,在弹性限度内,弹簧发生弹性形变时,弹力的大小 F与弹簧伸
长(或缩短)的长度成正比,即有F=kΔx,故可以用弹簧的伸长量来代替重力的大小,无需测
出钩码的重力;
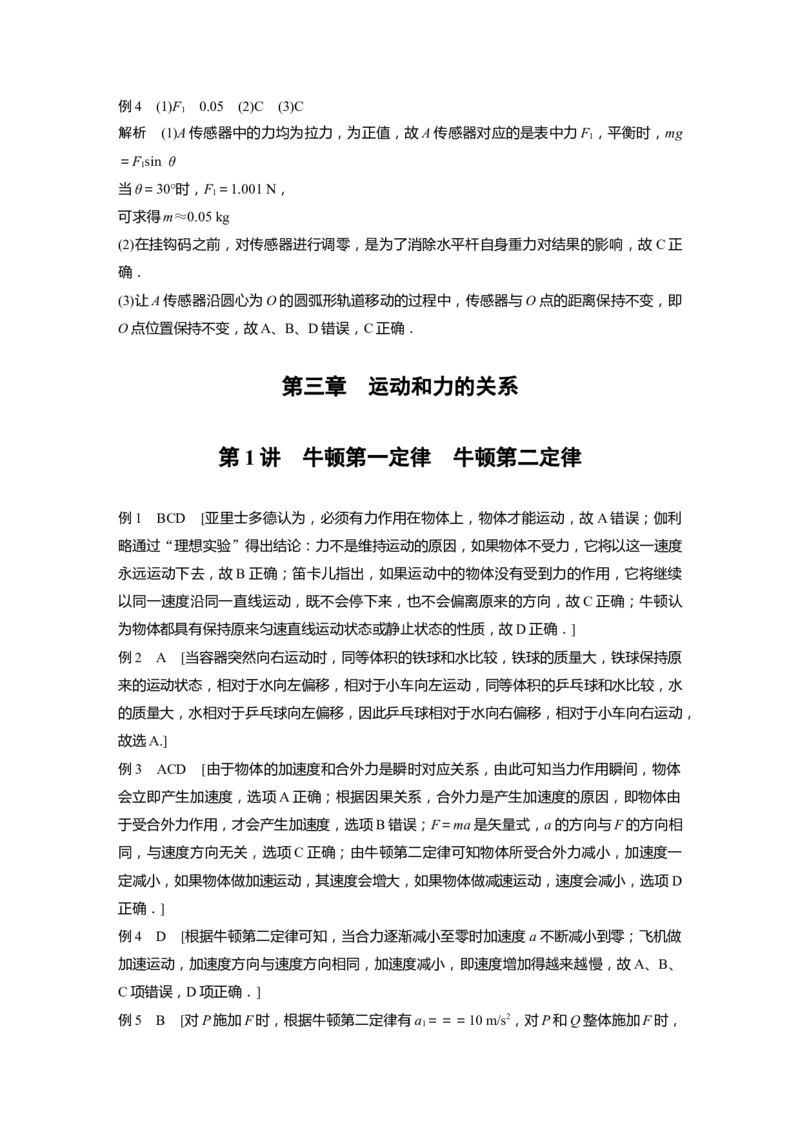
(2)根据平行四边形定则作出步骤②中的两个力的合力F′的图示,如图所示
(3)观察比较F和F′,由图示可得出的结论是:在误差允许的范围内,力的平行四边形定则
成立.
例3 (1)10.00 (2)5.00 (3)F
OO′
解析 (1)根据胡克定律,
有ΔF=kΔx
代入表格中第二组和第三组数据,有(2.00-1.00) N=k(12.00-11.00)×10-2 m,解得k=100
N/m
同理,再代入第一组和第二组数据,有
(1.00-0) N=100 N/m×(11.00-l)×10-2 m
0
解得l=10.00 cm.
0
(2)根据OA、OB的长度可求橡皮筋的弹力大小为
F =kΔl=100×(7.50+7.50-10.00)×10-2 N=5.00 N
OA
(3)在两个力的作用效果和一个力的作用效果相同的情况下,通过比较 F′和F 的大小和
OO′
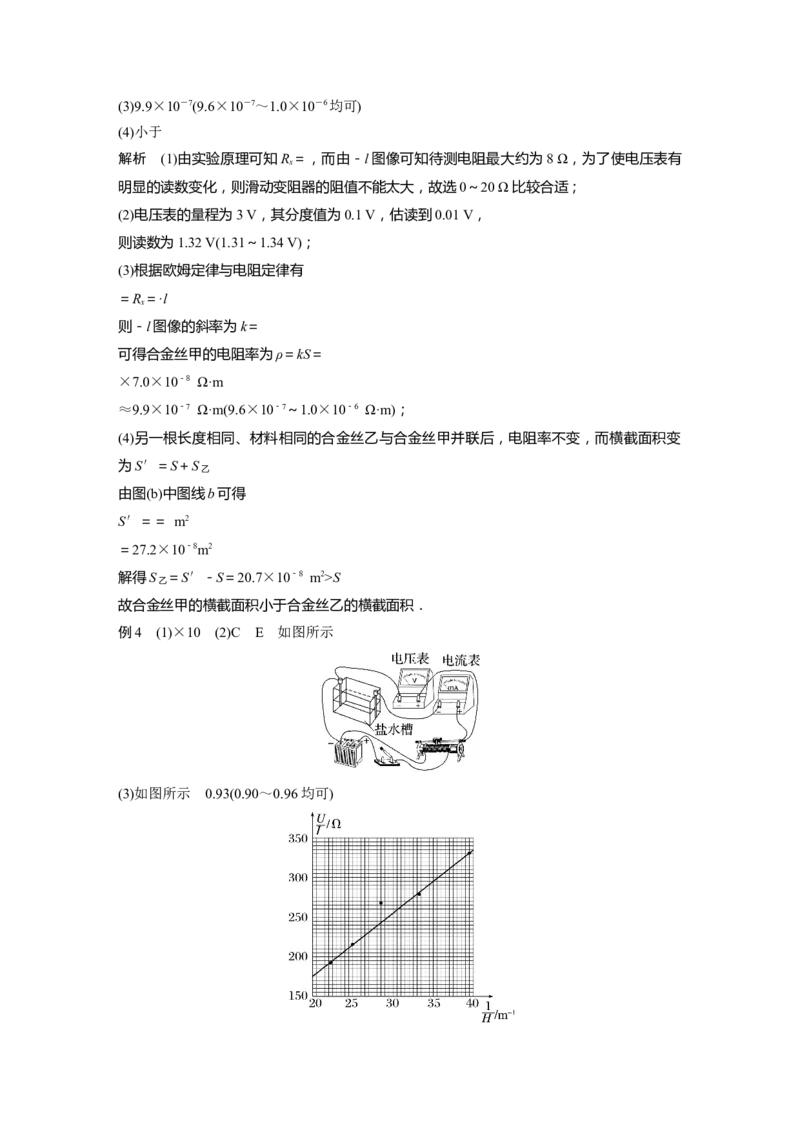
方向,即可验证力的平行四边形定则.例4 (1)F 0.05 (2)C (3)C
1
解析 (1)A传感器中的力均为拉力,为正值,故A传感器对应的是表中力F ,平衡时,mg
1
=Fsin θ
1
当θ=30°时,F=1.001 N,
1
可求得m≈0.05 kg
(2)在挂钩码之前,对传感器进行调零,是为了消除水平杆自身重力对结果的影响,故C正
确.
(3)让A传感器沿圆心为O的圆弧形轨道移动的过程中,传感器与O点的距离保持不变,即
O点位置保持不变,故A、B、D错误,C正确.
第三章 运动和力的关系
第 1 讲 牛顿第一定律 牛顿第二定律
例1 BCD [亚里士多德认为,必须有力作用在物体上,物体才能运动,故A错误;伽利
略通过“理想实验”得出结论:力不是维持运动的原因,如果物体不受力,它将以这一速度
永远运动下去,故B正确;笛卡儿指出,如果运动中的物体没有受到力的作用,它将继续
以同一速度沿同一直线运动,既不会停下来,也不会偏离原来的方向,故C正确;牛顿认
为物体都具有保持原来匀速直线运动状态或静止状态的性质,故D正确.]
例2 A [当容器突然向右运动时,同等体积的铁球和水比较,铁球的质量大,铁球保持原
来的运动状态,相对于水向左偏移,相对于小车向左运动,同等体积的乒乓球和水比较,水
的质量大,水相对于乒乓球向左偏移,因此乒乓球相对于水向右偏移,相对于小车向右运动,
故选A.]
例3 ACD [由于物体的加速度和合外力是瞬时对应关系,由此可知当力作用瞬间,物体
会立即产生加速度,选项A正确;根据因果关系,合外力是产生加速度的原因,即物体由
于受合外力作用,才会产生加速度,选项B错误;F=ma是矢量式,a的方向与F的方向相
同,与速度方向无关,选项C正确;由牛顿第二定律可知物体所受合外力减小,加速度一
定减小,如果物体做加速运动,其速度会增大,如果物体做减速运动,速度会减小,选项D
正确.]
例4 D [根据牛顿第二定律可知,当合力逐渐减小至零时加速度 a不断减小到零;飞机做
加速运动,加速度方向与速度方向相同,加速度减小,即速度增加得越来越慢,故A、B、
C项错误,D项正确.]
例5 B [对P施加F时,根据牛顿第二定律有a ===10 m/s2,对P和Q整体施加F时,
1根据牛顿第二定律有a===2 m/s2,联立解得m=4.0 kg,故选B.]
2 2
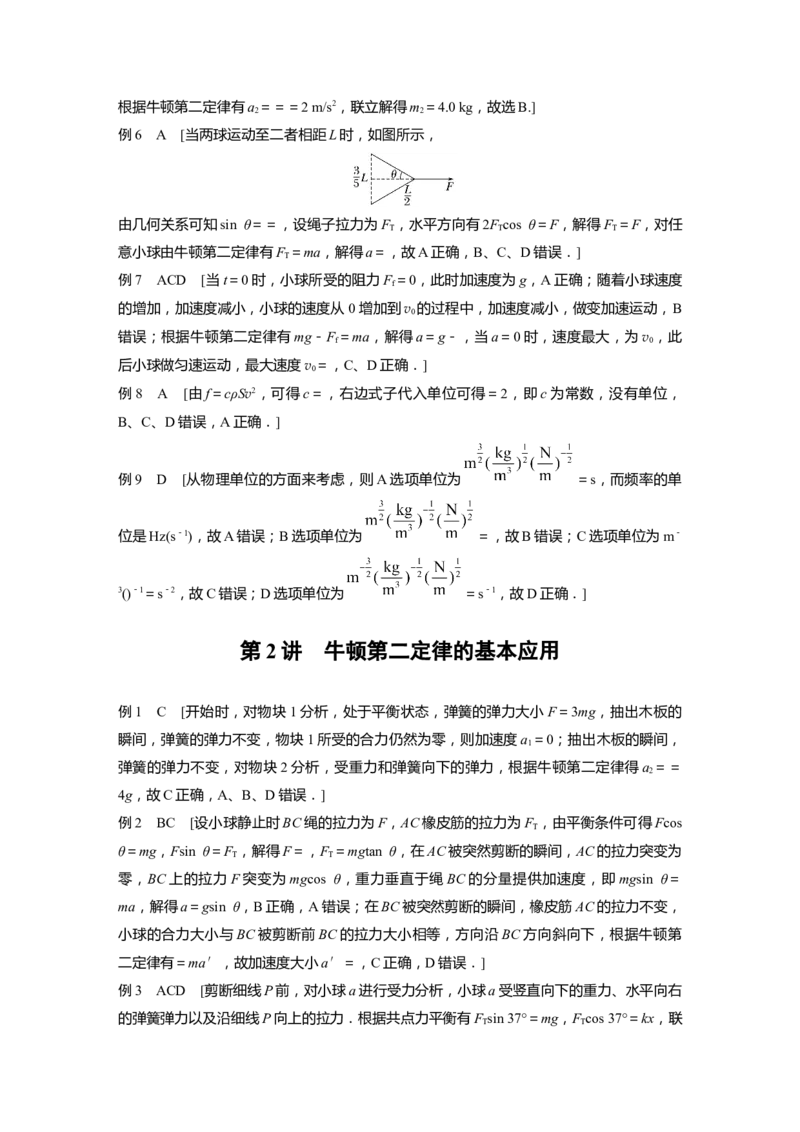
例6 A [当两球运动至二者相距L时,如图所示,
由几何关系可知sin θ==,设绳子拉力为F ,水平方向有2F cos θ=F,解得F =F,对任
T T T
意小球由牛顿第二定律有F =ma,解得a=,故A正确,B、C、D错误.]
T
例7 ACD [当t=0时,小球所受的阻力F=0,此时加速度为g,A正确;随着小球速度
f
的增加,加速度减小,小球的速度从0增加到v 的过程中,加速度减小,做变加速运动,B
0
错误;根据牛顿第二定律有mg-F=ma,解得a=g-,当a=0时,速度最大,为v ,此
f 0
后小球做匀速运动,最大速度v=,C、D正确.]
0
例8 A [由f=cρSv2,可得c=,右边式子代入单位可得=2,即c为常数,没有单位,
B、C、D错误,A正确.]
例9 D [从物理单位的方面来考虑,则A选项单位为 =s,而频率的单
位是Hz(s-1),故A错误;B选项单位为 =,故B错误;C选项单位为m-
3()-1=s-2,故C错误;D选项单位为 =s-1,故D正确.]
第 2 讲 牛顿第二定律的基本应用
例1 C [开始时,对物块1分析,处于平衡状态,弹簧的弹力大小F=3mg,抽出木板的
瞬间,弹簧的弹力不变,物块1所受的合力仍然为零,则加速度a =0;抽出木板的瞬间,
1
弹簧的弹力不变,对物块2分析,受重力和弹簧向下的弹力,根据牛顿第二定律得a ==
2
4g,故C正确,A、B、D错误.]
例2 BC [设小球静止时BC绳的拉力为F,AC橡皮筋的拉力为F ,由平衡条件可得Fcos
T
θ=mg,Fsin θ=F ,解得F=,F =mgtan θ,在AC被突然剪断的瞬间,AC的拉力突变为
T T
零,BC上的拉力F突变为mgcos θ,重力垂直于绳BC的分量提供加速度,即mgsin θ=
ma,解得a=gsin θ,B正确,A错误;在BC被突然剪断的瞬间,橡皮筋AC的拉力不变,
小球的合力大小与BC被剪断前BC的拉力大小相等,方向沿BC方向斜向下,根据牛顿第
二定律有=ma′,故加速度大小a′=,C正确,D错误.]
例3 ACD [剪断细线P前,对小球a进行受力分析,小球a受竖直向下的重力、水平向右
的弹簧弹力以及沿细线P向上的拉力.根据共点力平衡有F sin 37°=mg,F cos 37°=kx,联
T T立解得x=,故A正确;剪断细线P的瞬间,弹簧的弹力不变,所以小球b处于静止状态,
所受合力为零,加速度为0,故B错误;剪断细线P前,细线P的拉力大小为F =mg,剪
T
断与a球连接处的弹簧的瞬间,弹簧的弹力为零,小球a即将摆动,此时摆动的速度为零,
则径向合力为零,切向合力提供切向加速度,有 F ′-mgsin 37°=ma =0,mgcos 37°=
T n
ma,解得F ′=mga ,由x=at2可知,t>t ,即t>t=t,故B、C、D正确.]
ca Ob 2 ca 2 1 3
专题强化四 牛顿第二定律的综合应用
例1 C [若设木块和地面间的动摩擦因数为μ,以两木块整体为研究对象,根据牛顿第二
定律有F-μ(m +m)g=(m +m)a,得a=,以木块1为研究对象,根据牛顿第二定律有F
1 2 1 2 T
-μm g=ma,得a=,系统加速度与木块1加速度相同,联立解得F =F,可知绳子拉力大
1 1 T
小与动摩擦因数μ无关,与两木块质量大小有关,即与水平面是否粗糙无关,无论水平面是
光滑的还是粗糙的,绳的拉力大小均为F =F,且m 越大绳的拉力越小,故选C.]
T 2
例2 AD [设物块与斜面间的动摩擦因数为μ,对A、B整体受力分析,有F-(m +
A
m )gsin θ-μ(m +m )gcos θ=(m +m )a,对B受力分析,有F -m gsin θ-μm gcos θ=
B A B A B AB B B
m a,由以上两式可得F =F=,为了增大A、B间的压力,即F 增大,仅增大推力F、仅
B AB AB
减小A的质量或仅增大B的质量,故A、D正确,B、C错误.]
例3 C [对B分析,由牛顿第二定律得mg-F =ma,对A、B整体分析,由牛顿第二定
2 T 2
律得mg-mgsin θ=(m +m)a,联立解得a=6 m/s2,F =12 N,故A、B错误,C正确;
2 1 1 2 T
如果将物块B换成一个竖直向下且大小为30 N的力,对A由牛顿第二定律得F-mgsin θ=
1
ma′,解得a′=24 m/s2,前后加速度不一样,对物块A的运动有影响,故D错误.]
1
例4 AB [根据题图乙可知,发生相对滑动时,A、B间的滑动摩擦力为6 N,所以A、B之间的动摩擦因数μ==0.2,选项A正确;当0<F<4 N时,根据题图乙可知,F 还未达
f2
到B与地面间的最大静摩擦力,此时A、B保持静止,选项B正确;当4 N<F<12 N时,
根据题图乙可知,此时A、B间的摩擦力还未达到最大静摩擦力,所以没有发生相对滑动,
选项C错误;当F>12 N时,根据题图乙可知,此时A、B发生相对滑动,对A物块有a=
=2 m/s2,加速度不变,选项D错误.]
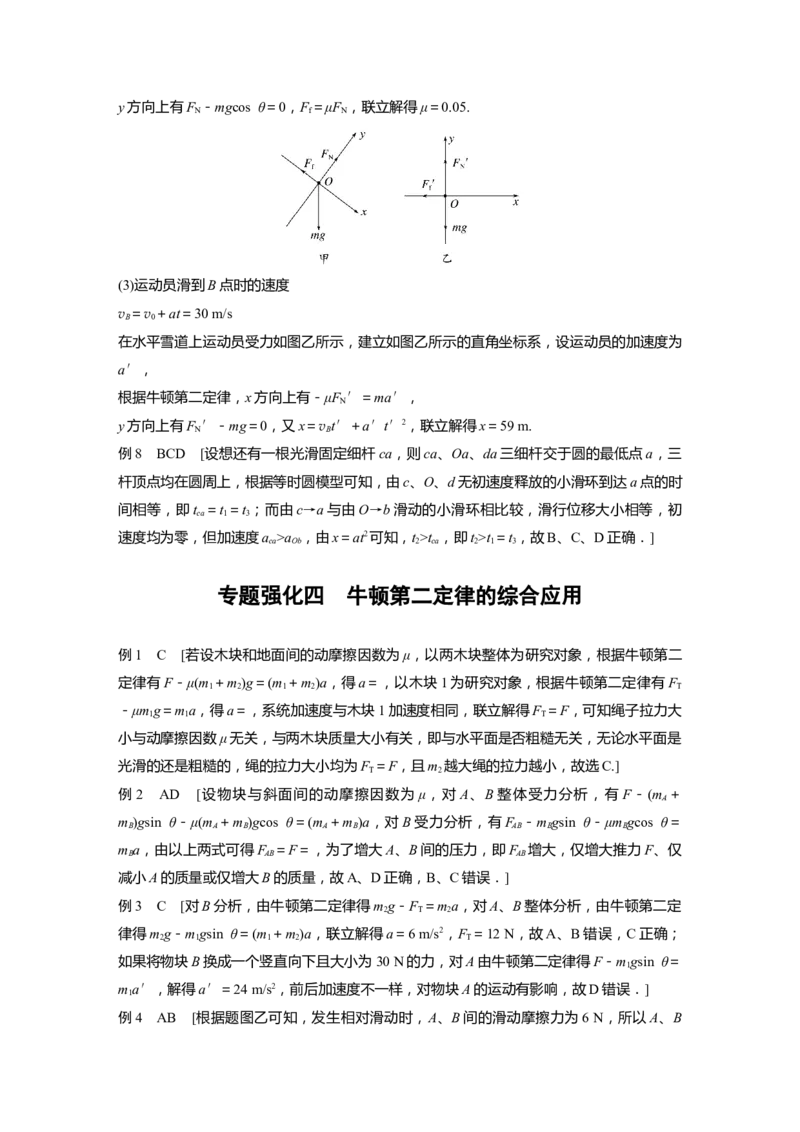
例5 0≤F≤310 N
解析 若要保证木块和斜面体不发生相对滑动,则两物体以相同的加速度向左做匀加速直线
运动,由于μ>tan θ,故当F=0时,木块静止在斜面体上,即F的最小值为0;根据题意
可知,当木块相对斜面体恰不向上滑动时,F有最大值F ,设此时两物体运动的加速度大
m
小为a,两物体之间的摩擦力大小为F,斜面体对木块的支持力为F .对整体和木块分别进
f N
行受力分析,如图甲、乙
对整体受力分析有F =(m+M)a,对木块受力分析有F=μF ,水平方向Fcos θ+F sin θ=
m f N f N
ma,竖直方向F cos θ=mg+Fsin θ,联立以上各式代入数据解得F =310 N,故F的大小
N f m
范围为0≤F≤310 N.
例6 BC [A、B整体受力产生加速度,则有F+F -(m +m )g=(m +m )a,可得F=
NAB A B A B
(m +m )a+(m +m )g-F ,当F 最大时,F最小,即刚开始施力时,F 最大且等于A
A B A B NAB NAB NAB
和B的重力之和,则F =(m +m )a=6 N,B正确,A错误;刚开始,弹簧的压缩量为x
min A B 1
==0.05 m,A、B分离时,其间恰好无作用力,对托盘B,由牛顿第二定律可知kx-m g=
2 B
m a,得x =0.04 m,物块A在这一过程的位移为Δx=x -x =0.01 m,由运动学公式可知v2
B 2 1 2
=2aΔx,代入数据得v=0.2 m/s,C正确,D错误.]
例7 (1) (2)θ=60° m
解析 (1)当θ=30°时,小物块恰好能沿着木板匀速下滑,
则mgsin 30°=F,F=μmgcos 30°,
f f
联立解得μ=.
(2)当θ变化时,设沿斜面向上为正方向,物块的加速度为a,
则-mgsin θ-μmgcos θ=ma,
由0-v2=2ax得
0
x=,
令cos α=,sin α=,即tan α=μ=,故α=30°,
又因x=
当α+θ=90°,即θ=60°时x最小,
最小值为
x =
min
== m.
例8 D [物体与弹簧分离时,二者没有相互作用力,所以弹簧处于原长,A错误;物体与
弹簧一起向上匀加速时,根据牛顿第二定律得F+k(x -x)-mg=ma,可知题图乙中图线斜
0
率表示劲度系数,可得k=5 N/cm,B错误;根据牛顿第二定律有10 N=ma,30 N-mg=
ma,联立解得m=2 kg,a=5 m/s2,C错误,D正确.]
例9 BCD [由题图(c)可知,t 时刻物块、木板一起刚要在水平地面滑动,物块与木板相对
1
静止,此时以整体为研究对象有F=μ(m+m)g,故A错误;由题图(c)可知,t 时刻物块与
1 1 1 2 2
木板刚要发生相对滑动,以整体为研究对象, 根据牛顿第二定律,有 F-μ(m+m)g=(m
2 1 1 2 1
+m)a,以木板为研究对象,根据牛顿第二定律,有μmg-μ(m+m)g=ma>0,解得F=
2 2 2 1 1 2 1 2
(μ -μ)g,由F>F 知μ>μ ,故B、C正确;由题图(c)可知,0~t 时间段物块与木板相对静
2 1 2 1 2 1 2
止,所以有相同的加速度,故D正确.]
专题强化五 传送带模型和“滑块—木板”模型
例1 AC [开始时,对行李,根据牛顿第二定律有μmg=ma,解得a=2 m/s2,故A正确;
设行李做匀加速运动的时间为t ,行李做匀加速运动的末速度为v=0.4 m/s,根据v=at ,
1 1
代入数据解得t =0.2 s,匀加速运动的位移大小x=at2=×2×0.22 m=0.04 m,匀速运动的
1 1
时间为t == s=4.9 s,可得行李从A到B的时间为t=t +t =5.1 s,故B错误;由以上分
2 1 2
析可知行李在到达B处前已经与传送带共速,所以行李到达B处时速度大小为0.4 m/s,故
C正确;行李在传送带上留下的摩擦痕迹长度为 Δx=vt -x=(0.4×0.2-0.04) m=0.04 m,
1
故D错误.]
例2 (1)0.4 m/s2 (2)4.5 s
解析 (1)小包裹的初速度v 大于传送带的速度v ,所以开始时小包裹受到的传送带的摩擦
2 1
力沿传送带向上,因为小包裹所受滑动摩擦力大于重力沿传送带方向上的分力,即μmgcos
θ>mgsin θ,所以小包裹与传送带共速后做匀速直线运动至传送带底端,根据牛顿第二定律
可知μmgcos θ-mgsin θ=ma,解得a=0.4 m/s2
(2)根据(1)可知小包裹开始阶段在传送带上做匀减速直线运动,
用时t== s=2.5 s
1在传送带上滑动的距离为
x=t=×2.5 m
1 1
=2.75 m
共速后,匀速运动的时间为t == s=2 s,所以小包裹通过传送带所需的时间为t=t +t =
2 1 2
4.5 s.
例3 BC [设传送带倾角为θ,滑块与传送带间的动摩擦因数为 μ,滑块质量为 m,若
mgsin θ>μmgcos θ,则滑块所受合力沿传送带向下,小滑块向下做匀加速运动;若 mgsin θ
=μmgcos θ,则小滑块沿传送带方向所受合力为零,小滑块匀速下滑;若mgsin θ<μmgcos
θ,则小滑块所受合力沿传送带向上,小滑块先做匀减速运动,当速度减为零时,开始反向
加速,当加速到与传送带速度相同时,因为最大静摩擦力大于小滑块重力沿传送带向下的分
力,故小滑块随传送带做匀速运动,A、D错误,B、C正确.]
例4 AD [物体运动的位移即v-t图像中图线与横轴围成的面积,则x=×4 m-2×2×
m=14 m,A正确;由物体运动的v-t图像可知,在2~6 s内物体做匀加速直线运动,有a
== m/s2=1 m/s2,且μmgcos 37°-mgsin 37°=ma,解得μ=0.875,B错误;在0~4 s内由
题图知,物体运动的位移为0,则在0~4 s内物体上升的高度为0,C错误;由选项A可知,
在0~8 s内物体的位移x=14 m,传送带的位移x′=vt=4×8 m=32 m,则0~8 s内物体
在传送带上留下的墨迹长度为Δx=x′-x=18 m,D正确.]
例5 (1)3 m/s2 (2)0.5 m
(3)2.8 m/s (4)0.7 m
解析 (1)对长木板,根据牛顿第二定律可得a=,解得a=3 m/s2
(2)撤去F之前,小物块只受摩擦力的作用,故a =μg=2 m/s2
m
Δx=at2-a t2=0.5 m
1 m
(3)刚撤去F时v=at=3 m/s,
v =a t=2 m/s
m m
撤去F后,长木板的加速度大小
a′==0.5 m/s2
最终速度v′=v +a t′=v-a′t′
m m
解得共同速度v′=2.8 m/s
(4)在t′内,小物块和长木板的相对位移Δx=-,
2
解得Δx=0.2 m
2
最终小物块离长木板右端
x=Δx+Δx=0.7 m.
1 2
例6 BC [对小孩,由牛顿第二定律得,加速度大小为a ==2.8 m/s2,同理对滑板,加速
1
度大小为a=
2=0.8 m/s2,A错误,B正确;小孩刚与滑板分离时,有at2-at2=L,解得t=1 s,离开滑
1 2
板时小孩的速度大小为v=at=2.8 m/s,D错误,C正确.]
1
例7 AB [由题图乙可知,力F在t =5 s时撤去,此时长木板P的速度v =5 m/s,t =6 s
1 1 2
时两者速度相同,v=3 m/s,t=6 s前长木板P的速度大于滑块Q的速度,t=6 s后长木板
2 2 2
P的速度小于滑块Q的速度,0~6 s过程中,以滑块Q为研究对象,由牛顿第二定律得
μmg=ma ,且a ==0.5 m/s2,解得μ =0.05,在5~6 s过程中,以长木板P为研究对象,
1 1 1 1
由牛顿第二定律得μ(2m)g+μmg=ma ,且a ==2 m/s2,解得μ =0.075,从6 s末到长木
2 1 2 2 2
板停下来的过程中,由牛顿第二定律得μ(2m)g-μmg=ma ,解得a =1 m/s2,这段时间Δt
2 1 3 3 3
==3 s,则t=9 s时长木板P停下来,故A正确,C错误;长木板P的长度至少是前6 s过
程中滑块Q在长木板P上滑行的距离,即Δx =×5×5 m+×(5+3)×1 m-×3×6 m=7.5
1
m,故B正确;在从6 s末到滑块Q停下来的过程中,由牛顿第二定律得μmg=ma ,解得
1 4
a =0.5 m/s2,这段时间Δt ==6 s,所以t =12 s时滑块Q停下来,6 s后滑块Q在长木板P
4 4 3
上滑行的距离Δx =×6×3 m-×3×3 m=4.5 m,前6 s长木板P速度更大,后6 s滑块Q
2
速度更大,则滑块Q在长木板P上滑行的相对位移为Δx=Δx-Δx=3 m,故D错误.]
1 2
实验四 探究加速度与力、质量的关系
例1 (1)BD (2)匀速直线 (3)远小于 (4)0.44 (5)小车 (6)C
解析 (1)利用天平测量质量,利用打点计时器可以计时,打出的纸带需测量长度求加速度,
所以需要天平和刻度尺,A、C错误,B、D正确.
(2)补偿阻力是使小车拖动纸带在木板上做匀速直线运动.
(3)为了使砂桶及砂的重力在数值上近似等于拉力,需要砂桶及砂的总质量远小于小车的总
质量.
(4)由某段时间中间时刻的瞬时速度等于该段时间运动过程的平均速度,可得
v == m/s
B
=0.44 m/s.
(5)探究加速度a与外力F的关系时,需要保持小车的总质量不变.
(6)在研究加速度与质量的关系时, 由于补偿了阻力,所以图像过原点,且分别对小车和砂
桶及砂受力分析,由牛顿第二定律可得 mg-F =ma,F =Ma,联立解得 mg=(M+m)a,
T T
整理解得a=,因为保证了砂和砂桶的质量不变,所以由实验数据作出a-的图线,不会发
生弯曲,故选C.
例2 (1)乙 (2)E 0.80 (3)AC解析 (1)补偿阻力的方法是取下重物,让小车拖着纸带在倾斜的木板上恰好能做匀速直线
运动,从题目所给的图可以看出,题图乙还挂着悬挂物,所以题图乙错误;
(2)从所给的表格数据可以看出,E点的数据没有估读,所以读取不当.由题意可知,相邻计
数点的时间间隔为T=5× s=0.1 s,由逐差法Δx=aT2,代入数据解得加速度大小为
a==
×10-2 m/s2
=0.80 m/s2;
(3)从题图丙可以看出,图像不过原点,即当F为某一值时,但加速度却为零,所以是未补
偿阻力或补偿阻力不足,故A正确,B错误;随着拉力F增大(即悬挂物的重力增大),已经
不满足悬挂物总质量远小于小车质量的条件,造成BC段弯曲,故C正确.
例3 (1)AB (2)B (3)0.264 0.495
(4)
解析 (1)除题图中所给的实验器材外,还必需选用的有刻度尺,用来测量纸带长度;打点
计时器本身就是计时仪器,则不需要秒表,也不需要干电池;根据2F-μmg=ma,可知要
测量动摩擦因数,需要天平测量物块质量,故选A、B.
(2)设物块的加速度为a,对物块有2F-μmg=ma,解得μ=,加速度可以由打点纸带求出,
为进一步测量动摩擦因数,则还需要测量物块的质量m,故选B.
(3)由题可知,T=5× s=0.1 s,打下计数点2时物块对应的速度大小v= m/s=0.264 m/s,
本次实验物块对应的加速度大小a==
m/s2
=0.495 m/s2.
(4)由牛顿第二定律可得2F-μmg=ma,即a=F-μg,由题意可知b-μg=0,=k,解得μ
=.
例4 (1)1.02 (5)见解析图
0.343(0.341~0.345均可)
解析 (1)垫块的厚度为
h=1 cm+2×0.1 mm=1.02 cm
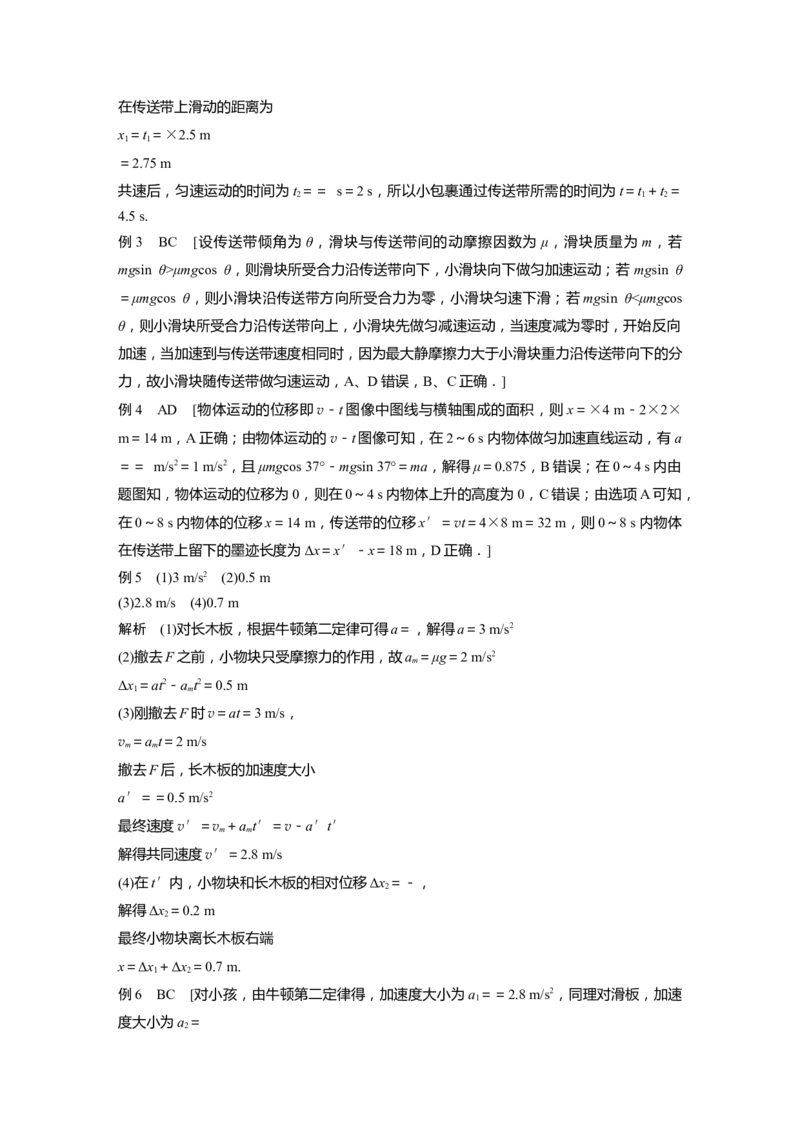
(5)绘制图线如图;根据mg·=ma
可知a与n成正比关系,则根据图像可知,斜率k==
解得a≈0.343 m/s2.
4
例5 (1)0.19(0.18~0.19均可)
(2)甲 甲和乙
解析 (1)由题意知小车做匀加速直线运动,故v =,将x =(36.10-32.40) cm=3.70 cm,T
d ce
=0.1 s,代入得v≈0.19 m/s;
d
(2)甲实验方案中:绳的拉力F满足:F=Ma,且mg-F=ma,
则F=,只有m≪M时,F才近似等于mg,故以托盘与砝码的重力表示小车的合外力,需
满足m≪M.
乙实验方案中:小车沿木板匀速下滑,小车受绳的拉力及其他力的合力为零,且绳的拉力大
小等于托盘与砝码的重力,取下托盘及砝码,小车所受的合外力大小等于托盘与砝码的重力
mg,不需要满足m≪M.
两个实验方案都可把mg作为F值.
例6 (1) (2)0.35
解析 (1)对铁块受力分析,由牛顿第二定律有mgsin θ-μmgcos θ=ma,
解得μ=.
(2)两个相邻计数点之间的时间间隔
T=5× s=0.10 s,
由逐差法和Δx=aT2可得
a=≈1.97 m/s2,
代入μ=,解得μ≈0.35.第四章 抛体运动与圆周运动
第 1 讲 曲线运动 运动的合成与分解
例1 C [原方案中,吹管吹气只改变了球沿BC方向的速度,而沿AB方向的速度不变,所
以单纯地沿BC方向吹气来施加力的作用不能使球落入球门中,仅增大吹气力度,只能加快
BC方向速度变化,不能使球进入球门,故A错误;将球门C沿直线CB向B移动一小段距
离,与原方案一样,不能落入球门,故B错误;将吹管向A平移适当距离,垂直AB方向吹
气,到达BC所在直线位置时乒乓球已经沿垂直AB方向运动了一段距离,可知球可能落入
球门中,故C正确;将吹管绕B点顺时针转动90°,正对着A吹气,乒乓球只能做直线运动,
不会进入球门,故D错误.]
例2 D [弹头的运动轨迹是曲线,因此合外力与速度关系应满足曲线运动条件,合外力指
向轨迹的凹侧,速度方向沿轨迹的切线方向,故选D.]
例3 C [运动员同时参与了两个分运动,竖直方向向下落的运动和水平方向随风飘的运动,
两个分运动同时发生,相互独立,水平方向的风力大小不影响竖直方向的运动,即落地时间
和竖直方向的速度不变,故A、B错误,C正确;水平风力越大,水平方向的速度越大,则
落地时的合速度越大,故D错误.]
例4 D [在0~t 时间内,无人机在水平方向做初速度为零的匀加速直线运动,在竖直方
1
向也做初速度为零的匀加速直线运动,则合运动为匀加速直线运动,选项A错误;在0~t
4
时间内,无人机竖直方向速度一直为正,即一直向上运动,则在 t 时刻,无人机还没有运动
2
到最高点,选项B错误;在t ~t 时间内,无人机水平方向做速度为v 的匀速运动,竖直方
3 4 0
向做匀减速运动,则合运动为匀变速曲线运动,选项C错误;在t 时刻,无人机的水平速度
2
为v、竖直速度为v,则合速度大小为,选项D正确.]
0 2
例5 C [根据题意,设河宽为d,第一次过河时船头始终指向与河岸垂直的方向,则渡河
时间为t =,第二次过河时行驶路线与河岸垂直,此时船的合速度为 v=,渡河时间为t
1 2
=,则第一次过河与第二次过河所用时间的比值为=,故A、B、D错误,C正确.]
例6 AD [当船头垂直对岸方向航行时,如图甲所示,有 x=vt ,解得水流的速度大小为
21
v == m/s=0.2 m/s,选项A正确;当船头保持与上游河岸成α角向上游航行时,如图乙所
2
示,有v =vcos α,d=vsin α·t ,由图甲可得d=vt ,联立解得sin α=,v≈0.33 m/s,d
2 1 1 2 11 1
=200 m,故船头与上游河岸间的夹角不是60°,选项B、C错误,D正确.]例7 D [设冲锋舟以最小速度v 和最短时间的冲锋舟速度v 分别从A运动到B,冲锋舟最
1 2
小速度v 垂直于AB连线,且v =vsin 30° ,最短时间的冲锋舟速度v 垂直于平直河岸,且
1 1 2
v=vtan 30°,可知=cos 30°=,故选项D正确.]
2
例8 B [汽车匀速向左运动,其速度可分解为沿绳子方向的分速度和垂直于绳子方向的分
速度,沿绳子方向的分速度v′=vcos θ,汽车在匀速向左运动的过程中,绳子与水平方向
的夹角θ减小,所以v′增大,即物体M向上做加速运动,又因为v′变化不均匀,所以不
是匀加速运动,故选项C、D错误;由于物体M向上做加速运动,由F-mg=ma可知,绳
子的拉力大于物体M所受的重力,故选项A错误,B正确.]
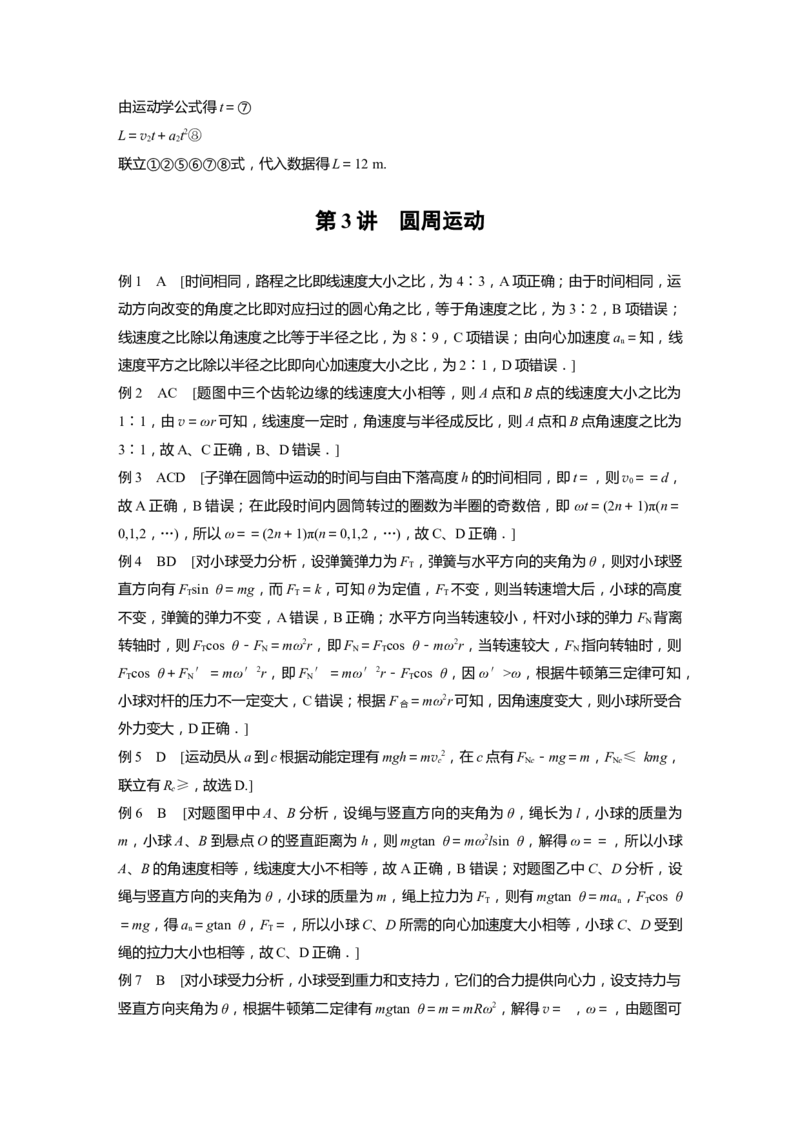
例9 A [当OP与OQ垂直时,设∠PQO=θ,此时活塞的速度为v,将P的速度分解为沿
连杆方向和垂直于连杆方向的速度;将活塞的速度v分解为沿连杆方向和垂直于连杆方向的
速度,则此时vcos θ=vcos θ,即v=v ,选项A正确,B错误;当O、P、Q在同一直线
0 0
时,P沿连杆方向的速度为零,则活塞运动的速度等于0,选项C、D错误.
]
第 2 讲 抛体运动
例1 AD [由题图知,h >h ,因为h=gt2,所以t <t ,又因为x=vt,且x >x ,所以v
b a a b 0 a b a
>v,选项A、D正确.]
b
例2 B [摩托车从a点做平抛运动到c点,水平方向:h=vt ,竖直方向:h=gt2,可解
11 1
得v =,动能E =mv2=;摩托车从a点做平抛运动到b点,水平方向:3h=vt ,竖直方
1 1 1 22
向:0.5h=gt2,解得v=3,动能E=mv2=mgh,故=18,B正确.]
2 2 2 2
例3 B [根据tan θ==,解得t=,初速度变为原来的2倍,则小球在空中的运动时间变
为原来的2倍,C错误;根据x=vt=知,初速度变为原来的2倍,则水平位移变为原来的
0
4倍,且PQ=,故PQ间距变为原来间距的4倍,D错误;末速度与水平方向夹角的正切值tan β===2tan θ,可知速度方向与水平方向夹角正切值是位移与水平方向夹角正切值的2
倍,因为位移与水平方向夹角不变,则末速度与水平方向夹角不变,由几何关系可知α不变,
与初速度大小无关,A错误,B正确.]
例4 C [由题意可得,对球1,有tan α==,对球2,有tan β=,又tan α·tan β=1,联
立解得t∶t=2∶1,A、B、D错误,C正确.]
1 2
例5 A [小球飞行过程中恰好与半圆轨道相切于B点,可知小球运动到B点时速度方向与
水平方向的夹角为30°,设位移方向与水平方向的夹角为θ,则tan θ==,由tan θ==,
可得竖直方向的位移y=R,而v2=2gy,tan 30°=,联立解得v=,选项A正确.]
y 0
例6 B [设网球击出后在空中飞行的时间为t,因为A点到球网的水平距离是击球点到球
网的水平距离的2倍,所以网球从击球点运动到球网的时间为,则H=gt2,H-h=g()2,联
立解得t=,故选B.]
例7 C [小球从最高点到右端出口,机械能守恒,有mg(H-h)=mv2,从右端出口飞出后,
小球做平抛运动,有x=vt,h=gt2,联立解得x=2,根据数学知识可知,当H-h=h时,x
最大,即h=1 m时,小球飞得最远,此时右端出口距离桌面高度为 Δh=1 m-0.8 m=0.2
m,故C正确.]
例8 D [若研究两个过程的逆过程,可看成是从篮筐沿同方向斜向上的斜抛运动,落到同
一高度上的两点,则A上升的高度较大,高度决定时间,可知A运动时间较长,即B先落
入篮筐中,A、B错误;因为两球抛射角相同,A的射程较远,则A球的水平速度较大,即
A在最高点的速度比B在最高点的速度大,C错误;由斜抛运动的对称性可知,当A、B上
升到某一相同高度时的速度方向相同,D正确.]
例9 (1)4.8 m (2)12 m
解析 (1)在M点,设运动员在ABCD面内垂直AD方向的分速度为v ,由运动的合成与分
1
解规律得
v=v sin 72.8°①
1 M
设运动员在ABCD面内垂直AD方向的分加速度为a ,由牛顿第二定律得 mgcos 17.2°=
1
ma ②
1
由运动学公式得d=③
联立①②③式,代入数据得d=4.8 m④
(2)在M点,设运动员在ABCD面内平行AD方向的分速度为v,
2
由运动的合成与分解规律得
v=v cos 72.8°⑤
2 M
设运动员在ABCD面内平行AD方向的分加速度为 a ,由牛顿第二定律得 mgsin 17.2°=
2
ma ⑥
2
设腾空时间为t,由运动学公式得t=⑦
L=vt+at2⑧
2 2
联立①②⑤⑥⑦⑧式,代入数据得L=12 m.
第 3 讲 圆周运动
例1 A [时间相同,路程之比即线速度大小之比,为4∶3,A项正确;由于时间相同,运
动方向改变的角度之比即对应扫过的圆心角之比,等于角速度之比,为3∶2,B项错误;
线速度之比除以角速度之比等于半径之比,为8∶9,C项错误;由向心加速度a =知,线
n
速度平方之比除以半径之比即向心加速度大小之比,为2∶1,D项错误.]
例2 AC [题图中三个齿轮边缘的线速度大小相等,则 A点和B点的线速度大小之比为
1∶1,由v=ωr可知,线速度一定时,角速度与半径成反比,则 A点和B点角速度之比为
3∶1,故A、C正确,B、D错误.]
例3 ACD [子弹在圆筒中运动的时间与自由下落高度h的时间相同,即t=,则v==d,
0
故A正确,B错误;在此段时间内圆筒转过的圈数为半圈的奇数倍,即 ωt=(2n+1)π(n=
0,1,2,…),所以ω==(2n+1)π(n=0,1,2,…),故C、D正确.]
例4 BD [对小球受力分析,设弹簧弹力为F ,弹簧与水平方向的夹角为θ,则对小球竖
T
直方向有F sin θ=mg,而F =k,可知θ为定值,F 不变,则当转速增大后,小球的高度
T T T
不变,弹簧的弹力不变,A错误,B正确;水平方向当转速较小,杆对小球的弹力 F 背离
N
转轴时,则F cos θ-F =mω2r,即F =F cos θ-mω2r,当转速较大,F 指向转轴时,则
T N N T N
F cos θ+F ′=mω′2r,即F ′=mω′2r-F cos θ,因ω′>ω,根据牛顿第三定律可知,
T N N T
小球对杆的压力不一定变大,C错误;根据F =mω2r可知,因角速度变大,则小球所受合
合
外力变大,D正确.]
例5 D [运动员从a到c根据动能定理有mgh=mv2,在c点有F -mg=m,F ≤ kmg,
c Nc Nc
联立有R≥,故选D.]
c
例6 B [对题图甲中A、B分析,设绳与竖直方向的夹角为θ,绳长为l,小球的质量为
m,小球A、B到悬点O的竖直距离为h,则mgtan θ=mω2lsin θ,解得ω==,所以小球
A、B的角速度相等,线速度大小不相等,故A正确,B错误;对题图乙中C、D分析,设
绳与竖直方向的夹角为θ,小球的质量为m,绳上拉力为F ,则有mgtan θ=ma ,F cos θ
T n T
=mg,得a =gtan θ,F =,所以小球C、D所需的向心加速度大小相等,小球C、D受到
n T
绳的拉力大小也相等,故C、D正确.]
例7 B [对小球受力分析,小球受到重力和支持力,它们的合力提供向心力,设支持力与
竖直方向夹角为θ,根据牛顿第二定律有mgtan θ=m=mRω2,解得v= ,ω=,由题图可知,球甲的轨迹半径大,则球甲的角速度一定小于球乙的角速度,球甲的线速度一定大于球
乙的线速度,故A错误,B正确;根据T=,因为球甲的角速度一定小于球乙的角速度,则
球甲的运动周期一定大于球乙的运动周期,故 C错误;因为支持力F =,结合牛顿第三定
N
律,球甲对内壁的压力一定等于球乙对内壁的压力,故D错误.]
例8 C [小球a速度大小变化,只有在最低点时所受合外力充当向心力,而小球 b做匀速
圆周运动,所受合外力充当向心力,故A错误;由几何关系可知,a、b两小球做圆周运动
的半径之比为,故B错误;Fcos θ=mg,即F =,故C正确;小球a到达最高点时速度为
b b
零,将重力正交分解,有F=mgcos θ,故D错误.]
a
例9 B [列车以规定速度转弯时受到重力、支持力的作用,重力和支持力的合力提供向心
力,A错误;当重力和支持力的合力提供向心力时,有m=mgtan α=mg,解得v=,故当
列车过转弯处的速度v=时,列车轮缘不会挤压内轨和外轨,B正确;列车过转弯处的速度
v<时,转弯所需的向心力F rad/s,BC绳被拉直且放开了m ,m 就一直处于平衡状态,AC绳中拉力
1 1
不变且为50 N,小于AC绳承受的最大拉力,AC未被拉断,C错误;对小球m ,竖直方向
2
有mgcos θ=mg,可得m =4 kg,当BC被拉断时有mgsin θ+F =mω2l ,解得ω =4
1 2 2 1 TBC 2 2 2 2
rad/s,D正确.]
例5 D [设小球通过最高点时的最小速度为v,则根据牛顿第二定律有mg=m,解得v=
0 0
2 m/s,故A正确;当小球在最高点的速度为v=4 m/s时,设轻绳拉力大小为F ,根据牛顿
1 T
第二定律有F +mg=m,解得F =15 N,故B正确;小球在轨迹最低点处速度最大,此时
T T
轻绳的拉力最大,根据牛顿第二定律有 F -mg=m,解得v =4 m/s,故C正确,D错
Tm m
误.]
例6 (1) (2)2mg 方向竖直向下 (3)能;当A、B球的速度大小为时,O轴不受力
解析 (1)A在最高点时,对A根据牛顿第二定律得mg=m,解得v =,因为A、B两球的角
A
速度相等,半径相等,则v =v =;
B A
(2)B在最高点时,对B根据牛顿第二定律得2mg+F ′=2m
TOB
代入(1)中的v ,可得F ′=0
B TOB
对A有F ′-mg=m
TOA
可得F ′=2mg
TOA
根据牛顿第三定律,O轴所受的力大小为2mg,方向竖直向下;
(3)要使O轴不受力,根据B的质量大于A的质量,设A、B的速度为v,可判断B球应在最
高点
对B有F ″+2mg=2m
TOB
对A有F ″-mg=m
TOA
O轴不受力时有F ″=F ″
TOA TOB
联立可得v=
所以当A、B球的速度大小为时,O轴不受力.
例7 BC [当物体在最高点时,也可能受到重力、支持力与摩擦力三个力的作用,摩擦力
的方向可能沿斜面向上(即背离圆心),也可能沿斜面向下(即指向圆心),摩擦力的方向沿斜
面向上时,ω越大时,小物体在最高点处受到的摩擦力越小,故A错误,B正确;当物体转
到圆盘的最低点恰好不滑动时,圆盘的角速度最大,此时小物体受竖直向下的重力、垂直于
斜面向上的支持力、沿斜面指向圆心的摩擦力,由沿斜面的合力提供向心力,支持力 F =
N
mgcos 30°,摩擦力F=μF =μmgcos 30°,又μmgcos 30°-mgsin 30°=mω2R,解得ω=1.0
f N
rad/s,故C正确,D错误.]实验五 探究平抛运动的特点
例1 (1)BD (2)a.球心 需要
b.大于 x (3)AB (4)B
解析 (1)因为本实验是研究平抛运动,只需要每次实验都能保证钢球做相同的平抛运动,
即每次实验都要保证钢球从同一高度无初速度释放并水平抛出,没必要要求斜槽轨道光滑,
因此A错误,B、D正确;挡板高度可以不等间距变化,故C错误.
(2)a.因为钢球做平抛运动的轨迹是其球心的轨迹,故将钢球静置于Q点,钢球的球心对应白
纸上的位置即为坐标原点(平抛运动的起始点);在确定y轴时需要y轴与重垂线平行.b.由
于平抛的竖直分运动是自由落体运动,故相邻相等时间内竖直方向上位移之比为
1∶3∶5∶…,故两相邻相等时间内竖直方向上的位移之比越来越大.因此>;由y -y =
2 1
gT2,x=vT,联立解得v=x.
0 0
(3)将铅笔垂直于竖直的白纸板放置,笔尖紧靠白纸板,铅笔以一定初速度水平抛出,由于
铅笔受摩擦力作用,且不一定能始终保证铅笔水平,铅笔将不能始终保持垂直白纸板运动,
铅笔将发生倾斜,故不会在白纸上留下笔尖的平抛运动轨迹,故C不可行,A、B可行.
(4)从同一炮台水平发射的炮弹,如果不受空气阻力,可认为做平抛运动,因此不论它们能
射多远,在空中飞行的时间都一样,这实际上揭示了平抛物体在竖直方向上做自由落体运动,
故选项B正确.
例2 (1)1.0 2.0 (2)9.7
解析 (1)小球做平抛运动,水平方向做匀速直线运动,因此速度的水平分量大小为 v ==
0
m/s=1.0 m/s;
竖直方向做自由落体运动,根据匀变速直线运动中,中间时刻的瞬时速度等于该段位移的平
均速度,因此小球在A点速度的竖直分量大小为
v= cm/s≈2.0 m/s.
y
(2)由竖直方向为自由落体运动可得
g=
代入数据可得g=9.7 m/s2.
例3 (1)AB (2)2 (3)方便调整木板,使其保持在竖直平面上
解析 (1)实验过程中要保证钢球水平抛出,所以要保持桌面水平,故A正确;为保证钢球
抛出时速度相同,每次应使钢球从同一位置由静止释放,故B正确;实验只要每次钢球水
平抛出时速度相同即可,斜面底边ab与桌面重合时,钢球不是水平抛出,而钢球与斜面间
的摩擦力大小对于本实验无影响,故C、D错误.
(2)每次将木板向远离桌子的方向移动0.2 m,则在白纸上记录钢球的相邻两个落点的时间间隔相等,钢球抛出后在竖直方向上做自由落体运动,根据Δx=gT2可知,相邻两点的时间间
隔T= s=0.1 s,钢球在水平方向上做匀速直线运动,所以钢球平抛的初速度为v== m/s
=2 m/s.
(3)悬挂铅垂线的目的是方便调整木板,使其保持在竖直平面上.
例4 (1)重垂线 (2)1∶3∶5 1∶1∶1 零 匀加速直线 (3)9.60
解析 (1)竖直线用重垂线确定,因为小球在竖直方向所受的重力是竖直向下的.
(2)由轨迹可知,竖直距离y ∶y ∶y =1∶3∶5;由于水平距离x =x =x ,则t =t
OA AB BC OA AB BC OA AB
=t ,所以 t ∶t ∶t =1∶1∶1,在连续相等的时间内,竖直方向的位移之比为
BC OA AB BC
1∶3∶5,表明在竖直方向上的运动是初速度为零的匀加速直线运动,O点就是抛出点.
(3)竖直方向有y=gt2,水平方向有x=vt,则平抛运动的轨迹方程为y=x2,则斜率为= m-
0
1=20 m-1,解得g=9.60 m/s2.
例5 (1) (2) (3)
(4)30°
解析 (1)小球在斜面上的运动是类平抛运动,由题图可知,小球在水平方向上发生7d的位
移,所用时间为t,根据水平方向上x=vt可得v==
0 0
(2)小球在横线上通过两格的时间为T=
从纵线上看,小球在连续的的时间内位移增加量为Δy=4d
根据逐差法Δy=aT2,可得a=
(3)沿斜面方向根据牛顿第二定律有mgsin θ=ma,则sin θ==
(4)代入数据可得sin θ=0.5,
则θ=30°.
实验六 探究向心力大小与半径、角速度、质量的关系
例1 (1)B (2)1∶2 变大 不变
解析 (1)把两个质量相等的钢球放在A、C位置时,则控制质量相等、半径相等,研究的目
的是向心力的大小与角速度的关系,故选B.
(2)由题意可知左、右两球做圆周运动所需的向心力之比为F ∶F =4∶1,则由F=mrω2,
左 右
可得=2,由v=Rω可知,皮带连接的左、右塔轮半径之比为R ∶R =ω ∶ω =1∶2,
左 右 右 左
其他条件不变,若增大手柄转动的速度,则角速度均增大,由F=mrω2,可知左、右两标尺
的示数将变大,但半径之比不变,由=可知,角速度比值不变,两标尺的示数比值不变.
例2 (1)控制变量法 (2)3
(3)见解析
解析 (1)根据F=mω2r,为了探究向心力大小与物体质量的关系,应控制半径 r相等,角速度ω大小相等,即采用控制变量法.
(2)为研究向心力大小跟转速的关系,必须要保证质量和转动半径均相等,则应比较表中的
第1组和第3组数据.
(3)本实验中产生误差的原因有:质量的测量引起的误差;弹簧测力套筒的读数引起的误差
等.
例3 (1) (2) mr
解析 (1)挡光杆通过光电门时的线速度大小为v=,由ω=,
解得ω=
(2)根据向心力公式有F=mω2r,将ω=,代入上式解得F=mr,可以看出,以为横坐标,以
F为纵坐标,可在坐标纸中描出数据点作一条直线,该直线的斜率为k=mr.
例4 (2)小球的直径d
(3)最大值 (4)0.05 1
解析 (2)根据v=知,要测量速度,需要知道钢球在挡光时间内通过的位移,即小球的直径
d,速度表达式为v=.
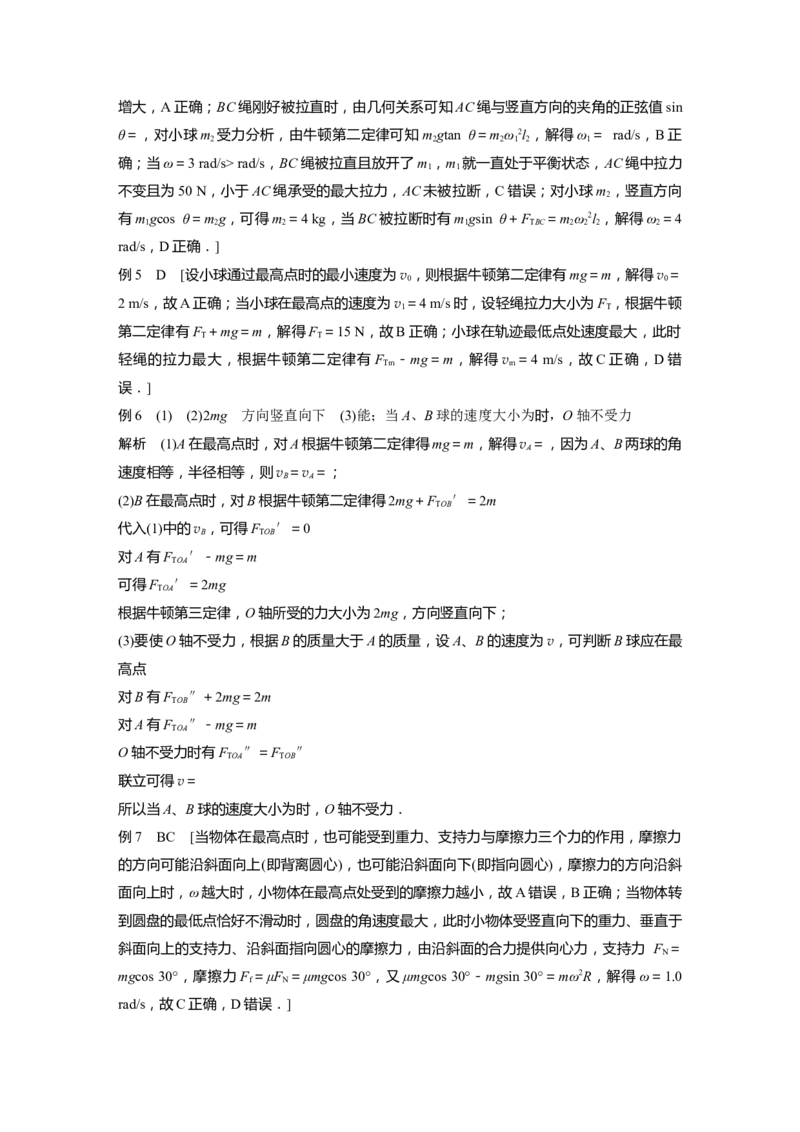
(3)小球摆动过程中受力分析如图所示,则有F -F =m,F =mgcos θ,故F =mgcos θ+
T 1 1 T
m,由于F 始终指向轨迹的最低点,故小球向最低点运动过程中速度增大,到达最低点时速
2
度最大,故在最低点F 最大,所以应选拉力F 的最大值.
T T
(4)小球摆至最低点时,由向心力公式得细线的最大拉力F =mg+v2,当小球速度为零时,
Tm
此时拉力与重力大小相等,对比图线可知 mg=0.485 N,解得m=0.05 kg,由斜率k==
kg/m,解得r=1 m.
例5 (1)否 (2)2∶2∶1
(3)1∶2∶2
解析 (1)物块的形状和大小相同,做圆周运动的半径相同,所以物块没有看作质点对实验
没有影响.
(2)当物块随转盘缓慢加速过程中,物块所需的向心力先由静摩擦力提供,当达到最大静摩
擦力后由绳子的拉力和最大静摩擦力提供,即 F =F+μmg=mrω2,所以有F=mrω2-
向
μmg,题图乙中图线的斜率为mr,与纵轴的截距为-μmg,根据题图乙知a的斜率k=mr=
a a
1 kg·m,b的斜率k =mr=1 kg·m,c的斜率k=mr= kg·m,所以a、b、c的质量之比为
b b c c
2∶2∶1,因为体积相同,所以物块a、b、c的密度之比为2∶2∶1.(3)由题图乙知a的纵轴截距-μmg=-1 N,b的纵轴截距-μmg=-2 N,c的纵轴截距-
a a b b
μmg=-1 N,结合质量之比得到物块a、b、c与转盘之间的动摩擦因数之比为1∶2∶2.
c c
第五章 万有引力与宇宙航行
第 1 讲 万有引力定律及应用
例1 D [据开普勒第二定律可知,行星在近日点的速度最大,在远日点的速度最小,行星
由a到b运动时的平均速率大于由c到d运动时的平均速率,而弧长ab等于弧长cd,故从a
到b的运动时间小于从c到d的运动时间,同理可知,从d经a到b的运动时间小于从b经c
到d的运动时间,A、B错误;从a经b到c的时间和从c经d到a的时间均为,可得t =
ab
t <,t =t >,C错误,D正确.]
da bc cd
例2 D [根据万有引力定律有F=G,B卫星在由近地点向远地点运动过程中受到地球引
力逐渐减小,A错误;根据开普勒第三定律得=,解得T =2T ,所以地心与卫星B的连线
B A
在T 时间内扫过的面积小于椭圆面积,B、C错误;1轨道圆心在地心,2轨道的一个焦点
A
也在地心,所以二者重合,D正确.]
例3 B [万有引力表达式为F=G,则同一物体在火星表面与在地球表面受到的引力的比
值为==0.4,选项B正确.]
例4 C [半径为R且密度均匀的完整球体对距离球心O为3R且质量为m的质点的万有引
力大小为F=G=G,挖去部分的质量为M′=×π()3=M,挖去部分对质点的万有引力大小
为F=G=G=G,则剩余部分对质点的万有引力大小为F=F-F,解得F=G,故选C.]
1 2 1 2
例5 B [设赤道处的重力加速度大小为g,物体在两极时万有引力大小等于重力大小,即
G=1.1mg,在赤道时万有引力大小等于重力和自转所需的向心力的合力大小,即 G=mg+
mω2R,由以上两式解得该行星自转的角速度为ω=,故选B.]
例6 D [设地球的质量为M,地球的半径为R,“海斗一号”下潜h深度后,以地心为球
心、以R-h为半径的球体的质量为M′,则根据密度相等有=,由于球壳对球内任一质点
的万有引力为零,根据万有引力定律有G=mg,联立以上两式并整理可得g=(R-h),由该
表达式可知D正确,A、B、C错误.]
例7 (1) (2) (3)
解析 (1)月球表面附近的物体做自由落体运动,有h=g t2,月球表面的自由落体加速度大
月
小g =
月
(2)不考虑月球自转的影响,有G=mg ,得月球的质量M=
月
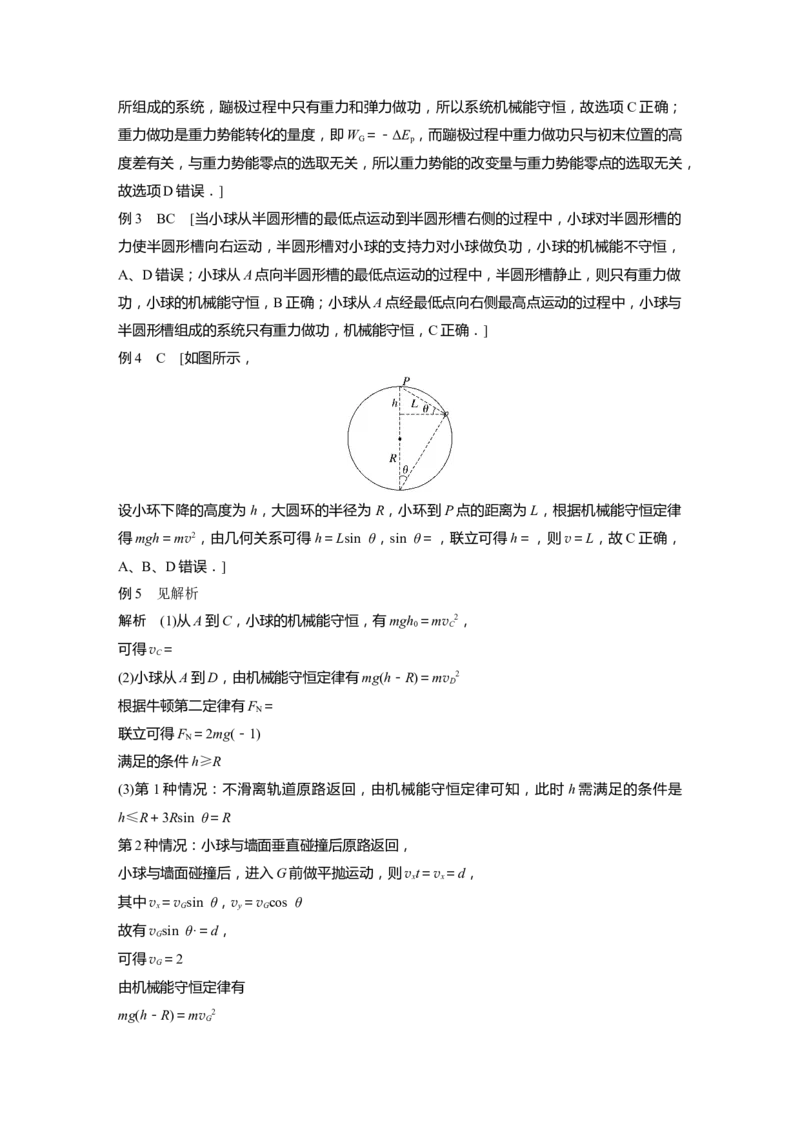
(3)月球的密度ρ===.例8 A [由题意可知,h=112 km=1.12×105 m,T=120.5 min=7 230 s,R=1.7×103 km
=1.7×106 m,设月球的质量为M,登月舱的质量为m,由月球对登月舱的万有引力提供向
心力,可得G=m(R+h),可有M=,代入数据解得M≈6.7×1022 kg,A正确,B、C、D错
误.]
例9 BD [由万有引力提供向心力,可得G=m,解得M=,月球体积V=πR3 ,所以月球
平均密度为ρ== ,故A错误,B正确;在月球表面,有G=mg,解得月球表面重力加速
度大小为g==,故C错误,D正确.]
第 2 讲 人造卫星 宇宙速度
例1 D [由题意可知,火星的公转周期大于地球的公转周期,根据G=mr,可得T=2π,
可知火星的公转半径大于地球的公转半径,故 C错误;根据G=m,可得v=,结合C选项
解析,可知火星公转的线速度小于地球公转的线速度,故A错误;根据ω=可知火星公转
的角速度小于地球公转的角速度,故B错误;根据G=ma,可得a=,可知火星公转的加速
度小于地球公转的加速度,故D正确.]
例2 C [轨道周长C=2πr,与半径成正比,故轨道周长之比为3∶2,故A错误;根据万
有引力提供向心力有=m,得v=,则==,故B错误;由万有引力提供向心力有=mω2r,
得ω=,则==,故C正确;由=ma,得a=,则==,故D错误.]
例3 C [地球同步卫星的周期与地球自转周期相同,选项A正确;根据G=m=mr可知,
因地球同步卫星的周期一定,则高度、速度大小都是一定的,选项B正确;同步卫星必须
定点在赤道上空,不可以定点在北京上空,选项C错误,D正确.]
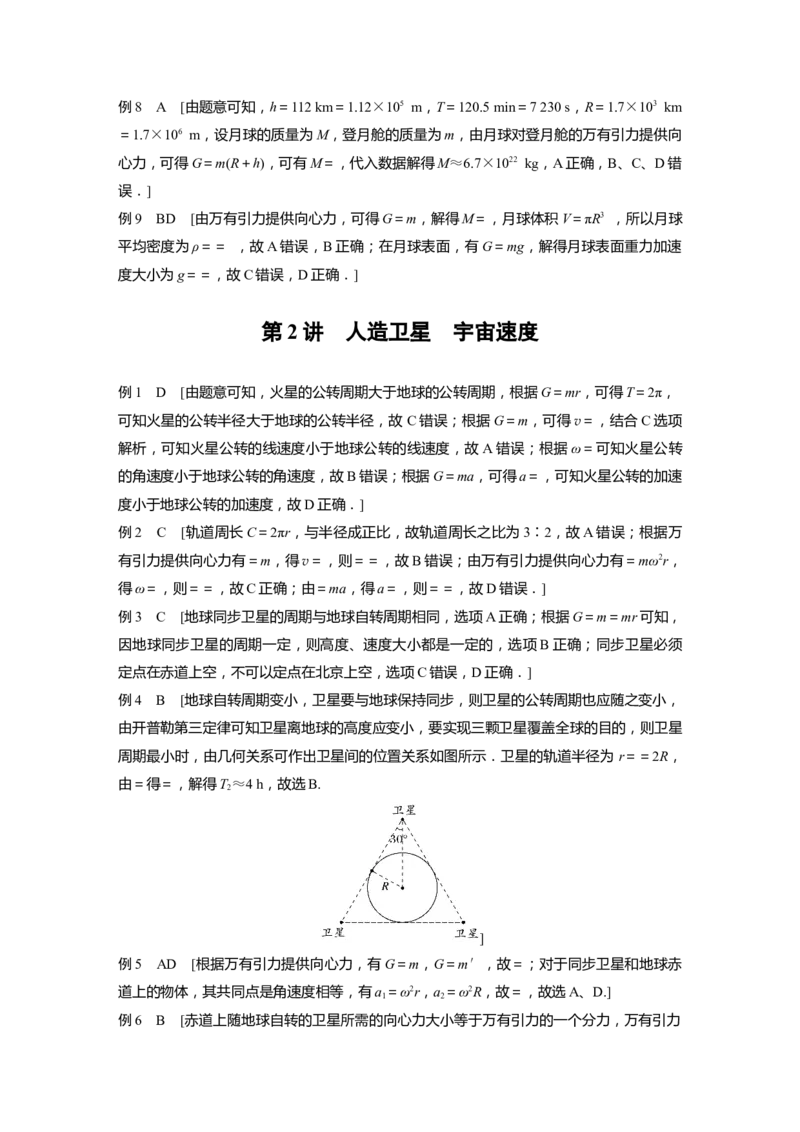
例4 B [地球自转周期变小,卫星要与地球保持同步,则卫星的公转周期也应随之变小,
由开普勒第三定律可知卫星离地球的高度应变小,要实现三颗卫星覆盖全球的目的,则卫星
周期最小时,由几何关系可作出卫星间的位置关系如图所示.卫星的轨道半径为 r==2R,
由=得=,解得T≈4 h,故选B.
2
]
例5 AD [根据万有引力提供向心力,有G=m,G=m′,故=;对于同步卫星和地球赤
道上的物体,其共同点是角速度相等,有a=ω2r,a=ω2R,故=,故选A、D.]
1 2
例6 B [赤道上随地球自转的卫星所需的向心力大小等于万有引力的一个分力,万有引力大小近似等于重力大小,则a的向心加速度小于重力加速度g,故A错误;由G=m,解得
v=,卫星的轨道半径r越大,速度v越小,所以在b、c、d中b的速度最大,又由v=ωr知
a的速度小于c的速度,故在相同时间内b转过的弧长最长,故B正确;c是地球同步卫星,
周期是24 h,则c在4 h内转过的圆心角是×2π=,故C错误;由开普勒第三定律可知,卫
星的半径r越大,周期T越大,所以d的运动周期大于c的运动周期,即大于24 h,则不可
能是20 h,故D错误.]
例7 C [卫星在行星表面附近绕行的速度为该行星的第一宇宙速度,由 G=m,可得v
=,故v ∶v =1∶,所以在火星上发射一颗绕火星运动的近地卫星,其速度至少需要v
火 地 火
=km/s,故A错误,C正确;“天问一号”探测器挣脱了地球引力束缚,则它的发射速度大
于等于11.2 km/s,故B错误;g =G,g =G,联立可得g >g ,故D错误.]
地 火 地 火
例8 (1) (2)
解析 (1)由题意可知星球表面重力加速度为g=,由万有引力定律知mg=m
解得v==.
1
(2)由星球表面万有引力等于物体重力知=mg,又E =-G,解得E =-,由机械能守恒定
p p
律有mv2-=0,解得v=.
2 2
例9 C [由开普勒第三定律得=,设两卫星至少经过时间t距离最远,即B比A多转半圈,
-=n -n =,又由A是地球同步卫星知T=T,
B A A 0
联立解得t=,故选C.]
例10 AD [根据开普勒第三定律:半径的三次方与周期的二次方成正比,则a、b运动的
周期之比为1∶8,A正确,B错误;设题图所示位置ac连线与bc连线的夹角为θ<,b转动
一周(圆心角为 2π)的时间为 T ,则 a、b 相距最远时有 T -T>(π-θ)+n·2π(n=
b b b
0,1,2,3,…),可知n=0,1,2,…,6,n可取7个值;a、b相距最近时有T -T>(2π-θ)+
b b
m·2π(m=0,1,2,3,…),可知m=0,1,2,…,6,m可取7个值,故在b转动一周的过程中,
a、b、c共线14次,C错误,D正确.]
专题强化七 卫星变轨问题 双星模型
例1 A [由高轨道进入低轨道需要点火减速,则由轨道Ⅰ进入轨道Ⅱ需在O点减速,A正
确;根据开普勒第三定律有=,因轨道Ⅱ的半径大于轨道Ⅲ的半长轴,所以在轨道Ⅱ上运行
的周期大于在轨道Ⅲ上运行的周期,B错误;根据v=可知,在轨道Ⅱ上运行的线速度小于
火星的第一宇宙速度,C错误;根据开普勒第二定律可知,近地点的线速度大于远地点的线
速度,所以在轨道Ⅲ上,探测器运行到O点的线速度小于运行到Q点的线速度,D错误.]
例2 C [轨道Ⅱ的半径大于椭圆轨道Ⅰ的半长轴,根据开普勒第三定律可知,在轨道Ⅱ上运行时的周期大于在轨道Ⅰ上运行时的周期,故A错误;在轨道Ⅰ上的N点和轨道Ⅱ上的
N点受到的万有引力相同,所以在两个轨道上经过N点时的加速度相同,故B错误;从轨道
Ⅱ到月地转移轨道Ⅲ做离心运动,在N点时嫦娥五号需要经过点火加速才能从轨道Ⅱ进入
轨道Ⅲ返回,故C正确;在月地转移轨道上飞行的过程中,始终在地球的引力范围内,不
存在不受万有引力的瞬间,故D错误.]
例3 D [当卫星在r=r的圆轨道上运行时,有G=m,解得在此圆轨道上运行时通过A点
1
的速度为v=,所以发动机在A点对卫星做的功为W=mv2-mv2=mv2-;当卫星在r=2r
0 1 0 2
的圆轨道上运行时,有G=m,解得在此圆轨道上运行时通过B点的速度为v′=,而根据
0
卫星在椭圆轨道上时到地心的距离与速度的乘积为定值可知,在椭圆轨道上通过 B点时的
速度为v =v=v,故发动机在B点对卫星做的功为W =mv′2-mv2=-mv2,所以W -W
1 2 0 1 1 2
=mv2-,D正确.]
例4 D [根据卫星变轨时,由低轨道进入高轨道需要点火加速,反之要减速,所以飞船先
到空间站下方的圆周轨道上同方向运动,合适位置加速靠近即可,或者飞船先到空间站轨道
上方圆周轨道上同方向运动,合适的位置减速即可,故选D.]
例5 C [每隔时间T两颗恒星与望远镜共线一次,则两恒星的运动周期为T′=2T,故A
错误; 根据万有引力提供向心力有G=m r =m r ,由题图知r m ,故B错误;
A A B B A B A B
由B选项得,两恒星总质量为M=m +m =,故C正确;根据v=ωr,两恒星角速度相等,
A B
则v c,联立
1 2 2
解得r<,所以D正确,A、B、C错误.]
第六章 机械能守恒定律
第 1 讲 功、功率 机车启动问题
例1 B [由于磁铁做匀速运动,磁铁所受合外力为零,合外力对磁铁不做功,故A错误;
磁铁受重力和AB对它的作用力而做匀速运动,根据平衡条件可知,AB对磁铁的作用力大
小等于重力,方向竖直向上,与磁铁的运动方向相互垂直,故AB对磁铁的作用力不做功,
故B正确;AB对磁铁的弹力垂直接触面,与磁铁的运动方向不垂直,故弹力一定做功,故
C错误;AB对磁铁的摩擦力沿接触面,与磁铁运动方向不垂直,故摩擦力一定做功,故D
错误.]
例2 (1)300 J (2)100 J (3)-400 J
(4)0
解析 物体置于升降机内随升降机一起匀速运动过程中,处于受力平衡状态,受力分析如图
所示
由平衡条件得Fcos θ-F sin θ=0,Fsin θ+F cos θ-G=0
f N f N
代入数据得F=10 N,F =10 N
f N
x=vt=20 m
(1)斜面对物体的支持力所做的功
W =F xcos θ=300 J
N N
(2)斜面对物体的摩擦力所做的功
W=Fxcos (90°-θ)=100 J
f f
(3)物体重力做的功
W =-Gx=-400 J
G
(4)合外力对物体做的功方法一:W =W +W+W =0
合 N f G
方法二:F =0,W =F xcos α=0.
合 合 合
例3 B [将圆弧分成很多小段l 、l 、…、l ,拉力F在每小段上做的功为W 、W 、…、
1 2 n 1 2
W ,因拉力F大小不变,方向始终与小球在该点的切线成37°角,所以W =Flcos 37°,W
n 1 1 2
=Flcos 37°,…,W =Flcos 37°,W=W +W +…+W =Fcos 37°(l +l +…+l)=Fcos
2 n n 1 2 n 1 2 n
37°·R=π J,同理可得克服摩擦力做功W=μmg·R=π J,拉力F做的功与克服摩擦力做的功
f
之比为2,故选B.]
例4 A [根据F-x图像的面积表示功, 则物体从0运动到7 m过程拉力做的功为W=
3×4 J+×4 J=40 J,由动能定理得W=mv2-0,解得v=2 m/s,故选A.]
例5 B [设浸入的深度为x,则浮力的大小为F=ρgV=ρgL2x,可见浮力与进入水中的位移
成正比.由平均值法知克服浮力做的功为W=×L=L=,故选B.]
例6 B [木块所受的合外力
F =mgsin θ-μmgcos θ=4 N,木块的加速度a==2 m/s2,前2 s内木块的位移x=at2=
合
×2×22 m=4 m,所以重力在前2 s内做的功为W=mgxsin θ=2×10×4×0.6 J=48 J,重力
在前2 s内的平均功率==24 W,木块在2 s末的速度v=at=2×2 m/s=4 m/s,2 s末重力的
瞬时功率P=mgvsin θ=2×10×4×0.6 W=48 W,故选项B正确.]
例7 C [由题图可知,第1 s内,滑块位移为1 m,F对滑块做的功为2 J,A错误;第2 s
内,滑块位移为1.5 m,F对滑块做的功为4.5 J,平均功率为4.5 W,B错误;第3 s内,滑
块位移为1.5 m,F对滑块做的功为1.5 J,第3 s末,F对滑块做功的瞬时功率P=Fv=1
W,C正确;前3 s内,F对滑块做的总功为8 J,D错误.]
例8 AD [开始时汽车做匀速运动,则F =F.由P=Fv可判断,P=Fv ,v ==,当汽车
0 f 0 0 0
功率减小一半,即P′=时,其牵引力为F′==<F,汽车开始做减速运动,F ==,加
f 1
速度大小为a==-,由此可见,随着汽车速度v减小,其加速度a也减小,即汽车做加速
度不断减小的减速运动,最终以v=做匀速直线运动,故A正确,B错误;同理,可判断出
汽车的牵引力由F′=最终增加到F,故D正确,C错误.]
0
例9 (1)80 kW (2)0.6 m/s2
(3)2 800 m
解析 (1)由题图可知,汽车的最大速度为 v =40 m/s,汽车达到最大速度时满足F=F=
m f
0.1mg
汽车的额定功率为P=Fv =8×104 W=80 kW
m
(2)当速度为v=25 m/s时,汽车牵引力为F==3 200 N
由牛顿第二定律得F-F=ma′
f
解得a′=0.6 m/s2
(3)0~t 时间内汽车通过的位移为x=t=200 m
1 1 1汽车在t 至t 期间,根据动能定理得P(t-t)-Fx=mv 2-mv2
1 2 2 1 f 2 m 1
代入数据解得x=2 600 m
2
所以0~t 时间内汽车通过的总位移大小为x=x+x=2 800 m.
2 1 2
第 2 讲 动能定理及其应用
例1 D [BC段物体所受摩擦力为F=μmg,位移为R,故BC段摩擦力对物体做功W=-
f
FR=-μmgR,对全程由动能定理可知mgR+W +W=0,解得W =μmgR-mgR,故AB段
f 1 1
克服摩擦力做功为W =mgR-μmgR=(1-μ)mgR,选D.]
克
例2 A [小球下落的高度为h=πR-R+R=R,小球下落过程中,根据动能定理有mgh=
mv2,综上有v=,故选A.]
例3 D [物块以初速度v上升的过程,由动能定理得-mgH-μmgcos θ·=0-mv2,解得μ
=tan θ.当物块的初速度为时,由动能定理得-mgh-μmgcos θ·=0-m2,解得h=,故选
D.]
例4 (1)4 m/s (2)150 N
解析 (1)从A到B过程,据动能定理可得(F-μmg)x =mv 2,解得小物块到达B点时速度
AB B
的大小为v =4 m/s.
B
(2)从B到D过程,据动能定理可得-mg·2R=mv 2-mv 2
D B
在D点由牛顿第二定律可得
F +mg=m,联立解得小物块运动到D点时,轨道对小物块作用力的大小为F =150 N.
N N
例5 A [根据功的定义式可知物体克服摩擦力做功为W=μmg(s+x),由动能定理可得-W
f
-W=0-mv2,则W =mv2-μmg(s+x),故选项A正确.]
弹 f 0 弹 0
例6 BC [根据牛顿第三定律可知,轨道对小孩的支持力大小也等于 2.5mg,根据牛顿第
二定律有F -mg=,可得v =,故A错误,B正确;从A到B由动能定理有mgR-W =
N B 克f
mv 2-0,可得克服摩擦力做的功为W =mgR,故C正确,D错误.]
B 克f
例7 A [0~10 m内物块上滑,由动能定理得-mgsin 30°·s-fs=E -E ,整理得E =E
k k0 k k0
-(mgsin 30°+f)s,结合0~10 m内的图像得,斜率的绝对值|k|=mgsin 30°+f=4 N,10~20
m内物块下滑,由动能定理得(mgsin 30°-f)(s-s)=E ,整理得E =(mgsin 30°-f)s-(mgsin
1 k k
30°-f)s,结合10~20 m内的图像得,斜率k′=mgsin 30°-f=3 N,联立解得f=0.5 N,m
1
=0.7 kg,故选A.]
例8 A
例9 ABC [物体做匀速直线运动时,受力平衡,拉力F 与滑动摩擦力F 大小相等,物体
0 f
与水平面间的动摩擦因数为μ==0.35,A正确;减速过程由动能定理得W +W=0-mv2,
F f根据F-x图像中图线与x轴围成的面积可以估算力F对物体做的功W ,而W=-μmgx,
F f
由此可求得合力对物体所做的功及物体做匀速运动时的速度v,B、C正确;因为物体做变
加速运动,所以运动时间无法求出,D错误.]
专题强化八 动能定理在多过程问题中的应用
例1 B [滑块由A点运动至D点,设克服摩擦力做功为W ,由动能定理得mgh-W
克fAD 克
=0,
fAD
即W =mgh,①
克fAD
滑块从D点回到A点,由于是缓慢推,说明动能变化量为零,设克服摩擦力做功为 W
克
,由动能定理知,滑块从D点被推回A点过程有
fDA
W -mgh-W =0,②
F 克fDA
由A点运动至D点,克服摩擦力做的功为W =μmgcos θ·+μmgs,③
克fAD
从D→A的过程克服摩擦力做的功为W =μmgcos θ·+μmgs,④
克fDA
联立③④得W =W ,⑤
克fAD 克fDA
联立①②⑤得W =2mgh,故A、C、D错误,B正确.]
F
例2 BC [物体从斜面底端回到斜面底端根据动能定理有-μmg·2lcos α=-E ,物体从斜
k
面底端到最高点根据动能定理有-mglsin α-μmglcos α=0-E ,整理得l=,μ=0.5,A错
k
误,C正确;物体向下滑动时根据牛顿第二定律有 ma =mgsin α-μmgcos α,解得a =,
下 下
B正确;物体向上滑动时根据牛顿第二定律有ma =mgsin α+μmgcos α,解得a =g,故
上 上
a >a ,由于上滑过程中的末速度为零,下滑过程中的初速度为零,且走过相同的位移,
上 下
根据位移公式l=at2,则可得出t μmgcos θ+F ,物块继续向下加速,F 继续变大,当mgsin θ<μmgcos θ+F 时,
弹 弹 弹
物块将向下减速,则物块向下运动时先加速后减速,向上运动时,由于在 c点和b点的速度
都为零,则物块先加速后减速,故B错误;设弹簧的最大弹性势能为E ,物块由a点到c
pm
点的过程中,根据能量守恒定律得mgsin θ=μmgcos θ+E ,解得E =0.25mgL,故C错
pm pm
误.]
例7 (1)2 m/s (2)0.4 m (3)6 J
解析 (1)在物体A向下运动刚到C点的过程中,对A、B组成的系统应用能量守恒定律可得
μ·2mgcos θ·L=×3mv2-×3mv2+2mgLsin θ-mgL,解得v=2 m/s.
0
(2)对A、B组成的系统分析,在物体A从C点压缩弹簧至最短后恰好返回到C点的过程中,
系统动能的减少量等于因摩擦产生的热量,即×3mv2-0=μ·2mgcos θ·2x
其中x为弹簧的最大压缩量
解得x=0.4 m.
(3)设弹簧的最大弹性势能为E ,从C点到弹簧被压缩至最短过程中由能量守恒定律可得
pm
×3mv2+2mgxsin θ-mgx=μ·2mgcos θ·x+E ,解得E =6 J.
pm pm
例8 (1)2μmgR+mgR
(2)m≤m或m≥m
1 2
解析 (1)小物块恰好过圆环最高点,则由牛顿第二定律有mg=m
从小物块释放至运动到最高点的过程中,由能量守恒定律有 E =μmg·2R+mg·2R+mv2,联
p
立可解得E=2μmgR+mgR
p
(2)要使小物块在运动过程中不脱离轨道,有两种情况:①小物块能够通过最高点;②小物
块在运动过程中最高到达与圆心等高处.
①设小物块质量为m ,在最高点满足mg≤m ,从小物块释放至运动到最高点的过程满足
1 1 1
E=2μm gR+2mgR+mv2,解得m≤m
p 1 1 1 1 1
②设小物块质量为m ,当小物块运动的最高点不高于圆心时,满足h≤R,此时E =2μm gR
2 p 2
+mgh,
2
解得m≥m.
2
专题强化九 动力学和能量观点的综合应用
例1 AD [建筑工人匀速运动到右端,所需时间t ==2 s,假设建筑材料先加速再匀速运
1
动,加速时的加速度大小为a=μg=1 m/s2,加速的时间为t ==1 s,加速运动的位移为x
2 1=t =0.5 m=2 m/s2,故A、B间有滑动摩擦力,对滑块
A,根据牛顿第二定律有F-μmg=ma ,解得a=3 m/s2
1 1
对木板B,根据牛顿第二定律有μmg=Ma,解得a=2 m/s2.
2 2
(2)撤去F时,滑块A的速度大小v=at=3 m/s,木板B的速度大小v=at=2 m/s,
1 11 2 21
撤去F后,由μmg=ma 得滑块A的加速度大小为a=4 m/s2,
3 3
设经历时间t 二者共速,则有v-at=v+at,解得t= s,
2 1 32 2 22 2
则v=v-at= m/s.
1 32
(3)外力F对A、B整体做的功为
F·Δx=F·at2= J
11
A、B最终以速度v= m/s运动.
故A、B整体动能为E=(M+m)v2= J
k
由能量守恒定律得F·Δx=Q+E,则Q= J.
k
例5 (1)2 m/s (2)50 N (3)6 J
(4)无法从B点离开,离D点0.2 m(或离C点0.8 m)
解析 (1)设滑块P经过B点的速度大小为v ,由平抛运动知识有v =v sin 30°,得v =2
B 0 B B
m/s
(2)滑块P从B点到达最低点C点的过程中,由机械能守恒定律得
mg(R+Rsin 30°)+mv 2
B
=mv 2
C
解得v =4 m/s
C
经过C点时受轨道的支持力大小为F ,有F -mg=m,
N N
解得F =50 N
N
由牛顿第三定律可得滑块在C点时对轨道的压力大小F =50 N
压
(3)设弹簧的弹性势能最大值为E ,滑块从C点到F点的过程中,根据动能定理有-μmgL
pm CD
-mgL sin 30°-E =0-mv 2,代入数据可解得E =6 J
DF pm C pm
(4)设滑块返回时能上升的高度为h,根据动能定理有mgL sin 30°+E -μmgL =mgh,代
DF pm CD
入数据可解得h=0.6 m,因为hv ,碰撞后氢核的动量为p =mv =mv ,氮核的动量为
4 2 0 1 0 2 H 1 0
p =14mv =,可得p >p ,碰撞后氢核的动能为 E =mv2=mv2,氮核的动能为E =
N 2 N H kH 1 0 kN
×14mv2=,可得E >E ,故B正确,A、C、D错误.]
2 kH kN
例9 (1)1≤<2 (2)mv2
0
解析 (1)设A、C粘在一起的共同速度大小为v ,根据动量守恒定律有2mv =(m+M)v ,
1 0 1
为保证A、B均向右运动的过程中不发生碰撞,应满足v≤v.设A、B碰撞后瞬间的共同速
1 0
度大小为v ,以向右为正方向,根据动量守恒定律有(m+M)v -Mv =(m+2M)v ,为使B
2 1 0 2
能与挡板再次碰撞,应满足v>0,解得1≤<2.
2
(2)若M=m,
则由(1)可得v=v,v=v
1 0 2 0
根据能量守恒定律有Q=m(2v)2+mv2-×3mv2,
0 0 2
解得Q=mv2.
0
专题强化十 碰撞模型的拓展
例1 A [根据题意可知,当弹簧压缩到最短时,两物体速度相同,所以此时乙物体的速度大小也是1 m/s,A正确;因为弹簧压缩到最短时,甲受力向左,甲继续减速,B错误;根
据动量守恒定律可得mv =(m +m)v,解得m∶m =1∶3,C错误;当弹簧恢复原长时,
1 0 1 2 1 2
根据动量守恒定律和机械能守恒定律有mv =mv′+mv′,mv2=mv′2+mv′2,联
1 0 1 1 2 2 1 0 1 1 2 2
立解得v′=2 m/s,D错误.]
2
例2 CD [开始时A逐渐减速,B逐渐加速,弹簧被压缩,t 时刻二者速度相同,系统动能
1
最小,势能最大,弹簧被压缩到最短,然后弹簧逐渐恢复原长,B仍然加速,A先减速为零,
然后反向加速,t 时刻,弹簧恢复原长,由于此时两物块速度方向相反,因此弹簧的长度将
2
逐渐增大,两物块均减速,A减为零后又向B运动的方向加速,在t 时刻,两物块速度相同,
3
系统动能最小,弹簧最长,因此从t 到t 过程中,弹簧由伸长状态恢复原长,故A、B错误;
3 4
根据动量守恒定律,t=0时刻和t=t 时刻系统总动量相等,有mv =(m +m)v ,其中v =
1 1 1 1 2 2 1
3 m/s,v =1 m/s,解得m∶m =1∶2,故C正确;在t 时刻A的速度为v =-1 m/s,B的
2 1 2 2 A
速度为v =2 m/s,根据E=mv2,且m∶m=1∶2,求出E ∶E =1∶8,故D正确.]
B k 1 2 k1 k2
例3 (1)0.6mv2 (2)0.768vt
0 00
解析 (1)当弹簧被压缩至最短时,弹簧弹性势能最大,此时A、B速度相等,即在t=t 时刻,
0
根据动量守恒定律有m ·1.2v=(m +m)v
B 0 B 0
根据能量守恒定律有
E =m (1.2v)2-(m +m)v2
pmax B 0 B 0
联立解得m =5m,E =0.6 mv2
B pmax 0
(2)B接触弹簧后,压缩弹簧的过程中,A、B动量守恒,
有m ·1.2v=m v +mv
B 0 B B A
对方程两边同时乘以时间Δt,有
6mvΔt=5mv Δt+mv Δt
0 B A
0~t 之间,根据位移等于速度在时间上的累积,可得6mvt=5ms +ms ,将s =0.36vt
0 00 B A A 00
代入可得s =1.128vt
B 00
则碰撞过程中,弹簧压缩量的最大值
Δs=s -s =0.768vt.
B A 00
例4 BC [小球上升到最高点时与小车相对静止,有相同的速度v′,由动量守恒定律和
机械能守恒定律有Mv =2Mv′,Mv2=×2Mv′2+Mgh,联立解得h=,故D错误;从小
0 0
球滚上小车到滚下并离开小车过程,系统在水平方向上动量守恒,由于无摩擦力做功,机械
能守恒,此过程类似于弹性碰撞,作用后两者交换速度,即小球返回小车左端时速度变为零,
开始做自由落体运动,小车速度变为 v ,动能为 Mv2,即此过程小球对小车做的功为
0 0
Mv2,故B、C正确,A错误.]
0
例5 AC [若滑块P固定,由于小球在各个环节无机械能损失,可知小球 Q能回到高1.2m处,选项A正确;若滑块P固定,小球Q第一次与挡板碰撞时的速度大小为 v==2
m/s,碰撞过程挡板对小球的冲量大小为I=2mv=4 N·s,选项B错误;若滑块P不固定,则
小球与滑块相互作用过程中,滑块和小球在水平方向动量守恒,则 mv -Mv =0,mgh=
1 2
mv2+Mv2,联立解得v =4 m/s,v =2 m/s,即小球Q第一次与挡板碰撞前的速度大小为4
1 2 1 2
m/s,选项C正确;若滑块P不固定,小球与挡板第一次碰撞后将以等大速度反弹,则滑上
滑块后再滑回到地面的过程,由动量守恒定律和能量关系可知mv +Mv =mv′+Mv′,
1 2 1 2
mv2+Mv2=mv′2+Mv′2,联立解得v′= m/s,v′= m/s,因此时小球的速度小于
1 2 1 2 1 2
滑块的速度,则小球与挡板碰后不能再次追上滑块,则滑块的最终速度大小为 m/s,选项D
错误.]
例6 (1)20 kg (2)不能,理由见解析
解析 (1)规定向左为正方向.冰块在斜面体上上升到最大高度时两者达到共同速度,设此
共同速度为v,斜面体的质量为m.对冰块与斜面体分析,由水平方向动量守恒和机械能守
3
恒得mv=(m+m)v①
2 0 2 3
mv2=(m+m)v2+mgh②
2 0 2 3 2
式中v=3 m/s为冰块推出时的速度,联立①②式并代入题给数据得
0
v=1 m/s,m=20 kg③
3
(2)设小孩推出冰块后的速度为v,对小孩与冰块分析,由动量守恒定律有mv+mv=0④
1 1 1 2 0
代入数据得v=-1 m/s⑤
1
设冰块与斜面体分离后的速度分别为v 和v ,对冰块与斜面体分析,由动量守恒定律和机
2 3
械能守恒定律有mv=mv+mv⑥
2 0 2 2 3 3
mv2=mv2+mv2⑦
2 0 2 2 3 3
联立③⑥⑦式并代入数据得
v=-1 m/s⑧
2
由于冰块与斜面体分离后的速度与小孩推出冰块后的速度相同且冰块处在小孩后方,故冰块
不能追上小孩.
专题强化十一 动量守恒在子弹打木块模型和板块模型中的
应用
例1 BD [子弹射入滑块过程中,子弹与滑块构成的系统动量守恒,有mv =(m+M)v,两
0
个子弹的末速度相等,所以子弹速度的变化量相等,A错误;滑块A、B动量变化量相等,
受到的冲量相等,B正确;对子弹运用动能定理,有W=mv2-mv2,由于末速度v相等,
f 0所以阻力对子弹做功相等,C错误;对系统,由能量守恒可知,产生的热量满足Q=mv2-
0
(m+M)v2,所以系统产生的热量相等,D正确.]
例2 ABD [两次打穿木块过程中,子弹受到的阻力F 相等,根据牛顿第二定律有a=,两
f
次子弹的加速度相等;第二次以同样的速度击穿放在光滑水平面上同样的木块,由于在子弹
穿过木块的过程中,木块会在水平面内滑动,所以第二次子弹的位移x 要大于第一次的位
2
移x ,即x >x ;子弹做减速运动,由位移公式x=vt+at2和x >x 可得,t >t ,故A正确.
1 2 1 0 2 1 2 1
两次打穿木块过程中,子弹受到的阻力相等,阻力对子弹做的功等于子弹损失的动能,即
ΔE =Fx,由于x >x ,所以ΔE >ΔE ,故B正确.两次打穿木块过程中,子弹受到
k损 f 2 1 k2损 k1损
的平均阻力相等,系统摩擦产生的热量Q=Fd,其中F 为阻力,d为子弹相对于木块的位
f f
移大小,由于两次子弹相对于木块的位移大小都是木块的长度,所以系统机械能的损失相等,
即E =E ,故C错误.p 小于子弹的初动量,第二次子弹穿透木块的过程,系统的动量
2损 1损 1
守恒,则p 等于子弹的初动量,所以p>p,故D正确.]
2 2 1
例3 (1)6 m/s 882 J (2)能
解析 (1)设子弹射入木块后与木块的共同速度为v,对子弹和木块组成的系统,由动量守恒
定律得
mv=(M+m)v,
0
代入数据解得v=6 m/s,此过程系统所产生的内能Q=mv2-(M+m)v2=882 J.
0
(2)假设子弹以v′=400 m/s的速度入射时没有射穿木块,则对以子弹和木块组成的系统,
0
由动量守恒定律得mv′=(M+m)v′,解得v′=8 m/s
0
此过程系统损失的机械能为
ΔE′=mv′2-(M+m)v′2
0
=1 568 J
由功能关系有Q=ΔE=F x =F d
阻 相 阻
ΔE′=F x ′=F d′
阻 相 阻
则==
解得d′= cm
因为d′>10 cm,所以能射穿木块.
例4 D [物块与小车组成的系统所受合外力为零,系统动量守恒;物块滑上小车后在小车
上滑动过程中克服摩擦力做功,部分机械能转化为内能,系统机械能不守恒,A错误;系统
动量守恒,以向右为正方向,由动量守恒定律得 mv =(m +m)v,系统产生的热量Q=
2 0 1 2
mv2-(m +m)v2=,则增大物块与车面间的动摩擦因数,摩擦生热不变,B错误;若v =
2 0 1 2 0
2.5 m/s,由动量守恒定律得mv =(m +m)v,解得v=1 m/s,对物块,由动量定理得-
2 0 1 2
μm gt=mv-mv ,解得t=0.3 s,C错误;要使物块恰好不从小车右端滑出,需物块到车面
2 2 2 0右端时与小车有共同的速度 v′,以向右为正方向,由动量守恒定律得 mv′=(m +
2 0 1
m)v′,由能量守恒定律得mv′2=(m+m)v′2+μm gL,解得v′=5 m/s,D正确.]
2 2 0 1 2 2 0
例5 (1)v (2) (3)
0
解析 (1)B、C碰撞过程中动量守恒,由题意分析知,B、C碰后具有相同的速度,设B、C
碰后的共同速度为v ,以B的初速度方向为正方向,由动量守恒定律得mv =2mv ,解得v
1 0 1 1
=,B、C共速后A以v 的速度滑上C,A滑上C后,B、C脱离,A、C相互作用过程中动
0
量守恒,设最终A、C的共同速度为v ,以向右为正方向,由动量守恒定律得mv +mv =
2 0 1
2mv,解得v=v.
2 2 0
(2)在A、C相互作用过程中,由能量守恒定律得FL=mv2+mv2-×2mv2,解得F=.
f 0 1 2 f
(3)A与C相互作用过程中,对C由动量定理得Ft=mv-mv,
f 2 1
解得t=.
例6 (1)5 m/s 0.5 m/s (2)3.6 m
解析 (1)对物块根据牛顿第二定律有Fcos θ-μ(mg-Fsin θ)=ma
1
对木板根据牛顿第二定律有
μ(mg-Fsin θ)=Ma
2
撤去拉力时,物块的速度大小v=at=5 m/s
1 1
木板的速度大小v=at=0.5 m/s.
2 2
(2)拉力撤去之前,物块相对木板的位移x=at2-at2
1 1 2
撤去拉力后,根据动量守恒定律有mv+Mv=(m+M)v
1 2
由能量守恒定律有
μmgx =mv2+Mv2-(M+m)v2
2 1 2
联立解得木板的长度L=x+x=3.6 m.
1 2
专题强化十二 动量和能量的综合问题
例1 (1)8 N 5 N (2)8 m/s
(3)0.2 m
解析 (1)当滑块处于静止时桌面对滑杆的支持力等于滑块和滑杆的重力,即 F =(m+M)g
N1
=8 N
当滑块向上滑动时受到滑杆的摩擦力为1 N,根据牛顿第三定律可知滑块对滑杆的摩擦力也
为1 N,方向竖直向上,则此时桌面对滑杆的支持力为F =Mg-F′=5 N.
N2 f
(2)滑块开始向上运动到碰前瞬间根据动能定理有-mgl-Fl=mv2-mv2,代入数据解得v
f 1 0 1
=8 m/s.(3)由于滑块和滑杆发生完全非弹性碰撞,即碰后两者共速,取竖直向上为正方向,碰撞过
程根据动量守恒定律有mv=(m+M)v
1
碰后滑块和滑杆以速度v整体向上做竖直上抛运动,根据动能定理有
-(m+M)gh=0-(m+M)v2
代入数据联立解得h=0.2 m.
例2 (1)1.2 m (2)8 m/s (3)8.5 J
(4)0.4 m
解析 (1)对子弹与小车组成的系统,由动量守恒定律有mv=(m+M)v
0 0 0 1
当小物块运动到圆弧轨道的最高点时三者共速,对三者由水平方向动量守恒有(m +M)v =
0 1
(m+M+m)v
0 2
由机械能守恒定律有
(m+M)v2=(m+M+m)v2+mgh,联立解得h=1.2 m
0 1 0 2
即小物块沿圆弧轨道上升的最大高度h=1.2 m.
(2)当小物块第一次回到B点时,设车和子弹的速度为v ,取水平向右为正方向,由水平方
3
向动量守恒有
(m+M)v=(m+M)v+mv
0 1 0 3
由能量守恒定律有
(m+M)v2
0 1
=(m+M)v2+mv2
0 3
联立解得v=2 m/s,v=8 m/s
3
即小物块第一次返回到B点时速度大小为v=8 m/s.
(3)当弹簧具有最大弹性势能E 时,三者速度相同.由动量守恒定律有(m +M)v +mv=(m
pm 0 3 0
+M+m)v
4
由能量守恒定律有
(m+M)v2+mv2
0 3
=(m+M+m)v2+μmgL+E
0 4 pm
联立解得E =8.5 J.
pm
(4)小物块最终与小车保持相对静止时,三者共速,设小物块在BC部分总共运动了s的路程,
由水平方向动量守恒有
(m+M)v=(m+M+m)v
0 1 0 5
由能量守恒定律有
(m+M)v2
0 1
=(m+M+m)v2+μmgs
0 5联立解得s=2.4 m=4L-x
则小物块与小车保持相对静止时到B的距离x=0.4 m.
例3 (1)4.1 m (2)不能 (3)1.8 m
解析 (1)设碰撞后物块B由D点以速度v 做平抛运动,
D
落到P点时v2=2gR①
y
其中=tan 45°②
联立①②解得v =4 m/s③
D
设平抛用时为t,水平位移为x,
2
则有R=gt2④
x=v t⑤
2 D
联立④⑤解得x=1.6 m⑥
2
由x=6t-2t2可知,物块B碰后以速度v=6 m/s、加速度a=-4 m/s2减速到v ,则BD过程
0 D
由运动学公式v 2-v2=2ax⑦
D 0 1
解得x=2.5 m⑧
1
故BP之间的水平距离
s =x+x=4.1 m⑨
BP 2 1
(2)假设物块B能沿轨道到达M点,在M点时其速度为v ,由D到M的运动过程,根据动
M
能定理,
则有-mgR=mv 2-mv 2⑩
M D
设在M点轨道对物块的压力大小为F ,则F +mg=m⑪
N N
由⑩⑪解得F =(1-)mg<0,假设不成立,即物块B不能到达M点.
N
(3)物块A、B的碰撞为弹性正碰且质量相等,碰撞后速度交换,
则v =v=6 m/s⑫
A 0
设物块A释放的高度为h,对下落过程,根据动能定理有mgh=mv 2,⑬
A
由⑫⑬解得h=1.8 m.
例4 (1)7.5 J (2)2 J (3) m
解析 (1)设B、C分离瞬间B、C的速度大小分别为v 和v ,B、C组成的系统动量守恒,
B C
则有m v -m v =0
B B C C
由能量守恒定律得
E=m v 2+m v 2
p B B C C
分离后,物块C做平抛运动,
则有h=gt2,x=v t
C
联立解得v =2 m/s,v =3 m/s,
C BE=7.5 J.
p
(2)B、C分离后,B向左做匀减速直线运动,A静止不动,设A、B碰撞前瞬间B的速度为
v ,对物块B,由动能定理得-μm gL=m v 2-m v 2
B1 B B B1 B B
A、B发生弹性碰撞,取水平向左为正方向,碰撞过程中系统动量守恒、机械能守恒,则有
m v =m v +m v ,
B B1 B B2 A A
m v 2=m v 2+m v 2
B B1 B B2 A A
且E =m v 2
kA A A
联立解得v =2 m/s,v =0,
B1 B2
v =2 m/s,E =2 J.
A kA
(3)A、B碰撞后,A向左做匀减速直线运动,B向左做匀加速直线运动,
则对B有μm g=m a
B B B
对A有μm g+μ(m +m )g=m a
B B A A A
解得a =6 m/s2,a =2 m/s2
A B
设经过时间t,两者共速,
则有v=a t=v -a t
B A A
解得v= m/s,t= s
此过程中A向左运动距离
x=t=× m= m
1
此后,A、B相对静止一起减速到零,有-μ(m +m )gx
B A 2
=0-(m +m )v2
B A
解得x= m,
2
整个过程中A在桌面上滑行的距离为x=x+x=(+) m
1 2
= m.
实验八 验证动量守恒定律
例1 (2)0.304 (6)0.31 (7)0.32
(8)= 0.34
解析 (2)用质量较小的滑块碰撞质量较大的滑块,碰后运动方向相反,故选质量为 0.304 kg
的滑块作为A.
(6)由于两段位移大小相等,根据表中的数据可得k====0.31.
2
(7)的平均值为
==0.32.(8)弹性碰撞时满足动量守恒和机械能守恒,可得mv=-mv+mv
1 0 1 1 2 2
mv2=mv2+mv2
1 0 1 1 2 2
联立解得=,
代入数据可得=0.34.
例2 (1) AC (2)AD (3)①2(OC-OA)=OB ②OC+OA=OB
解析 (1)本实验只要确保轨道末端水平,从而确保小球离开轨道后做的是平抛运动即可,
并不需要轨道光滑;另一方面,要确保放上被碰小球后,入射小球的碰前的速度大小保持不
变,故要求从同一位置由静止释放入射小球,故选A、C.
(2)验证动量守恒定律,必须测量质量和速度,由于入射小球、被碰小球离开轨道后的运动
都是平抛运动,且平抛的竖直位移相同,故由x=v 可知,小球的水平位移x∝v,故可用水
0 0
平位移的大小关系表示速度的大小关系,因此不需要测量H及入射小球开始的释放高度h,
H只要保持不变就可以了,并不需要测量出来,故选A、D.
(3) ①由题图乙可知,OA=17.60 cm,OB=25.00 cm,
OC=30.00 cm,代入质量关系,
可知m·OB≠m·OA+m·OC
1 1 2
但是m·OC≈m·OA+m·OB
1 1 2
故OC才是入射小球碰前速度对应的水平位移,
由动量守恒定律得m·OC=m·OA+m·OB
1 1 2
根据m=2m
1 2
解得2(OC-OA)=OB
②验证碰撞是否为弹性碰撞,则可以验证
mv2=mv′2+mv′2
1 1 1 1 2 2
即m·OC2=m·OA2+m·OB2
1 1 2
变形得m·OC2-m·OA2
1 1
=m·OB2
2
根据m=2m
1 2
则有2(OC-OA)(OC+OA)=OB2
解得OC+OA=OB.
例3 (1)> (2)M N
(3)m=m+m
1 1 2
(4)ms ms +ms
1 P 1 M 2 N
解析 (1)为了防止入射小球碰撞后反弹,一定要保证入射小球的质量大于被碰小球的质量,
故m>m;
1 2
(2)碰撞前,小球m 落在题图中的P点,由于m>m ,当小球m 与m 发生碰撞后,m 的落
1 1 2 1 2 1点是题图中M点,m 的落点是题图中N点;
2
(3)设碰前小球m 的水平初速度为v ,当小球m 与m 发生碰撞后,小球m 落到M点,设其
1 1 1 2 1
水平速度为v′,m 落到N点,设其水平速度为v′,斜面BC与水平面的倾角为α,由平
1 2 2
抛运动规律得s sin α=gt2,s cos α=v′t,联立解得v′=,同理可得v′=,v =,因
M M 1 1 2 1
此只要满足mv=mv′+mv′,即m=m+m.
1 1 1 1 2 2 1 1 2
(4)如果小球的碰撞为弹性碰撞,则满足mv2=mv′2+mv′2
1 1 1 1 2 2
代入以上速度表达式可得ms =ms +ms ,故验证ms 和ms +ms 相等即可.
1 P 1 M 2 N 1 P 1 M 2 N
例4 (1)3.80 (2)①m
a
ms ②+ ③
b
解析 (1)挡光片的宽度d=3 mm+16×0.05 mm=3.80 mm.
(2)①要验证“动量守恒定律”,则应该验证mv=mv,由滑块a通过光电门可求v=,由
a a b b a
b球离开平台后做平抛运动,根据h=gt2,s=vt,整理可得v =s,因此需验证的表达式为
b b
m =ms;②弹性势能大小为E =mv2+mv2,代入数据整理得E =+;③根据动能定理可
a b p a a b b p
得μmgx =mv2,而v=,联立整理得x =·,故k=,可得平台A点左侧与滑块a之间的动
a a a a
摩擦因数μ=.
第八章 机械振动 机械波
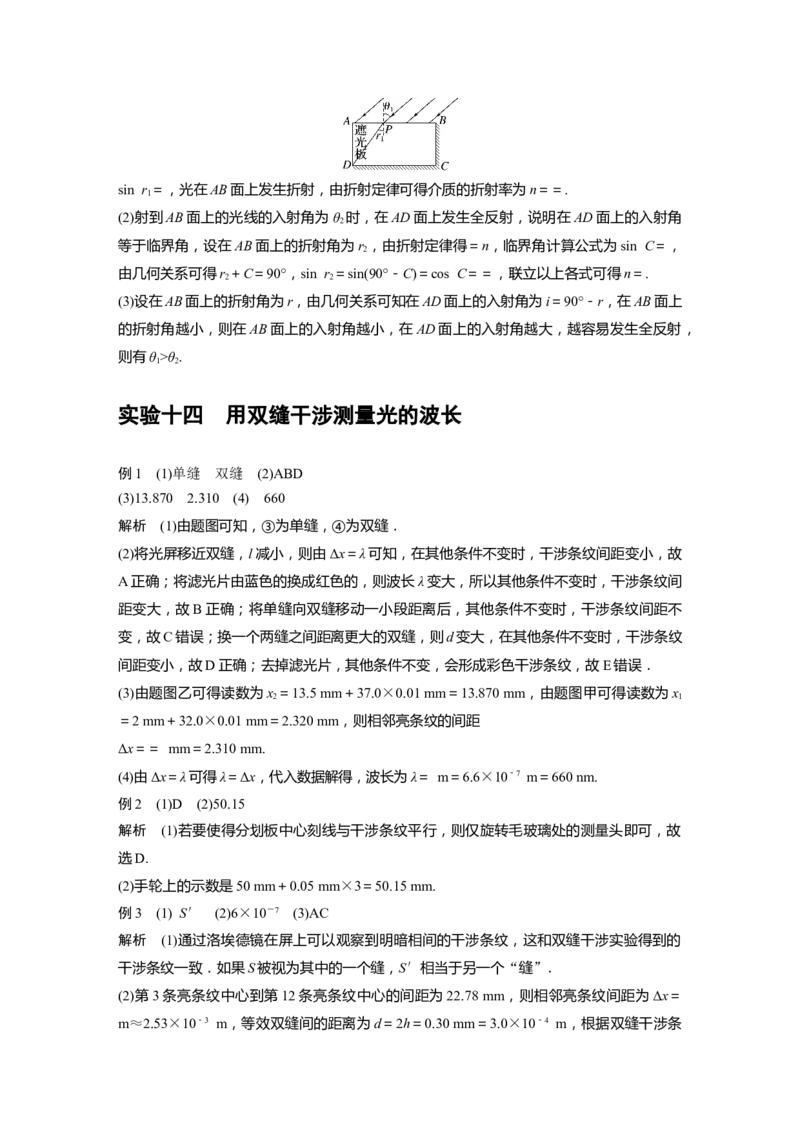
第 1 讲 机械振动
例1 A [做简谐运动的小球,从C到O的过程中逐渐靠近平衡位置,速度方向指向平衡位
置,弹簧弹力充当回复力,也指向平衡位置,故速度方向与受力方向相同,所以合外力做正
功,动能增大;同时由于偏离平衡位置的位移减小,由回复力公式F=-kx可知,回复力逐
渐减小,根据牛顿第二定律可知 F=-kx=ma,故加速度不断减小,故A正确;由上述分
析可知回复力不断减小,整个系统只有系统内的弹簧弹力做功,故系统的机械能守恒,故 B
错误;在小球从C到O的过程中,弹簧形变量逐渐减小,故弹性势能逐渐减小,同时由上
述分析可知,加速度也逐渐减小,故C、D错误.]
例2 ACD [如果在t 时刻物块的速度大小也为v、方向也向下,则t -t 的最小值可能小
2 2 1
于,故A正确;如果在t 时刻物块的动能也为E ,则t -t 的最小值小于,故B错误;当物
2 k 2 1
块通过O点时,其加速度最小,速度最大,动能最大,故C、D正确.]
例3 AD [若小球从O点开始向指向P点的方向振动,作出示意图如图甲所示则小球的振动周期为T=(0.5+0.1)×4 s=2.4 s,则该小球再经过时间Δt=T-0.2 s=2.2 s,
1 1
第三次经过P点;若小球从O点开始向背离P点的方向振动,作出示意图如图乙所示
则有0.5 s+0.1 s=T ,小球的振动周期为T =0.8 s,则该小球再经过时间Δt′=T -0.2 s=
2 2 2
0.6 s,第三次经过P点,B、C错误,A、D正确.]
例4 C [由题图可知,弹簧振子的振幅为 0.12 m,周期为1.6 s,所以ω==1.25π rad/s,
结合振动图像得,振动方程为 x=0.12sin(1.25πt) m,在 t=0.6 s 时,物体的位移 x =
1
0.12sin(1.25π×0.6) m=6 cm,A错误;由振动图像可知,t=0.2 s时,物体从平衡位置向右
运动,t=1.0 s时,物体从平衡位置向左运动,速度方向不同,B错误;t=1.2 s时,物体到
达A处,物体的加速度方向水平向右,C正确;t=1.0 s到t=1.2 s的时间内,物体向负向最
大位移处运动,速度减小,加速度增大;t=1.2 s到t=1.4 s时间内,物体从负向最大位移处
向平衡位置运动,则速度增大,加速度减小,D错误.]
例5 BC [MN间距离为2A=10 cm,故A错误;因ω=10π rad/s,可知小球的运动周期是
T== s=0.2 s,故B正确;由x=5sin(10πt+) cm可知,t=0时,x =5 cm,即小球位于N
1
点,故C正确;由x=5sin(10πt+) cm可知,t=0.05 s时,x =0,此时小球位于O点,小球
2
加速度为零,故D错误.]
例6 ACD [小球的摆动可视为单摆运动,摆长为线长时对应的周期 T =2π=π s,摆长为
1
线长减去墙体长时对应的周期T=2π=0.6π s,故小球从最左端到最右端所用的最短时间为t
2
==0.4π s,根据运动的周期性得选项A、C、D正确.]
例7 BCD [单摆的周期和振幅与摆球的质量无关,无法求出甲、乙两单摆摆球的质量关
系,A错误;由题图可知甲、乙两单摆的周期之比为1∶2,根据单摆的周期公式T=2π可
知,周期与摆长的二次方根成正比,所以甲、乙两单摆的摆长之比是1∶4,B正确;由加
速度公式a==可知,t=1.5 s时,两摆球位移方向相同,所以它们的加速度方向相同,C正
确;3~4 s内,由题图可知两摆球均向平衡位置运动,动能均增加,则两摆球的势能均减少,
D正确.]
例8 D [摇把匀速转动的频率f=n= Hz=4 Hz,周期T==0.25 s,当振子稳定振动时,
它的振动周期及频率均与驱动力的周期及频率相等,A、B错误;当转速减小时,其频率更
接近振子的固有频率,弹簧振子的振幅增大,C错误,D正确.]
例9 AB [题图所示的图线中振幅最大处对应的频率应与做受迫振动的单摆的固有频率相
等,从图线上可以看出,两单摆的固有频率 f =0.2 Hz,f =0.5 Hz.当两摆在月球和地球上
Ⅰ Ⅱ分别做受迫振动且摆长相等时,根据f=可知,g越大,f越大,所以g >g ,又因为g >g ,
Ⅱ Ⅰ 地 月
因此可推知图线Ⅰ表示月球上单摆的共振曲线,A正确;若两个单摆在地球上同一地点进行
受迫振动,g相同,摆长长的f小,因为=,所以=,B正确;因为f =0.5 Hz,若图线Ⅱ是
Ⅱ
在地面上完成的,根据f=,可计算出L 约为1 m,C错误;单摆的能量除了与振幅有关,
Ⅱ
还与摆球质量有关,由于两摆球质量关系未知,故不能比较两摆的能量,D错误.]
实验九 用单摆测量重力加速度
例1 (1)AB (2)18.9 (3)最低点
(4)见解析图 9.84(9.83~9.89范围内均可) (5)见解析
解析 (1)用一块开有狭缝的橡皮夹牢摆线,可以在需要改变摆长时便于调节;用铁架台的
铁夹将橡皮夹紧,从而保证摆动过程中摆长不变.上述做法并不能保证摆球在同一竖直平面
内摆动,故选A、B.
(2)由题图乙可知摆球直径为d=18 mm+9×0.1 mm=18.9 mm.
(3)摆球在最高点附近运动速度较小,人由于视觉原因不可能精确定位摆球是否经过最高点,
由此造成时间测量的相对误差较大.摆球在最低点附近速度较大,因位置判断造成的误差对
时间测量的影响较小,所以应在摆球经过最低点时开始计时.
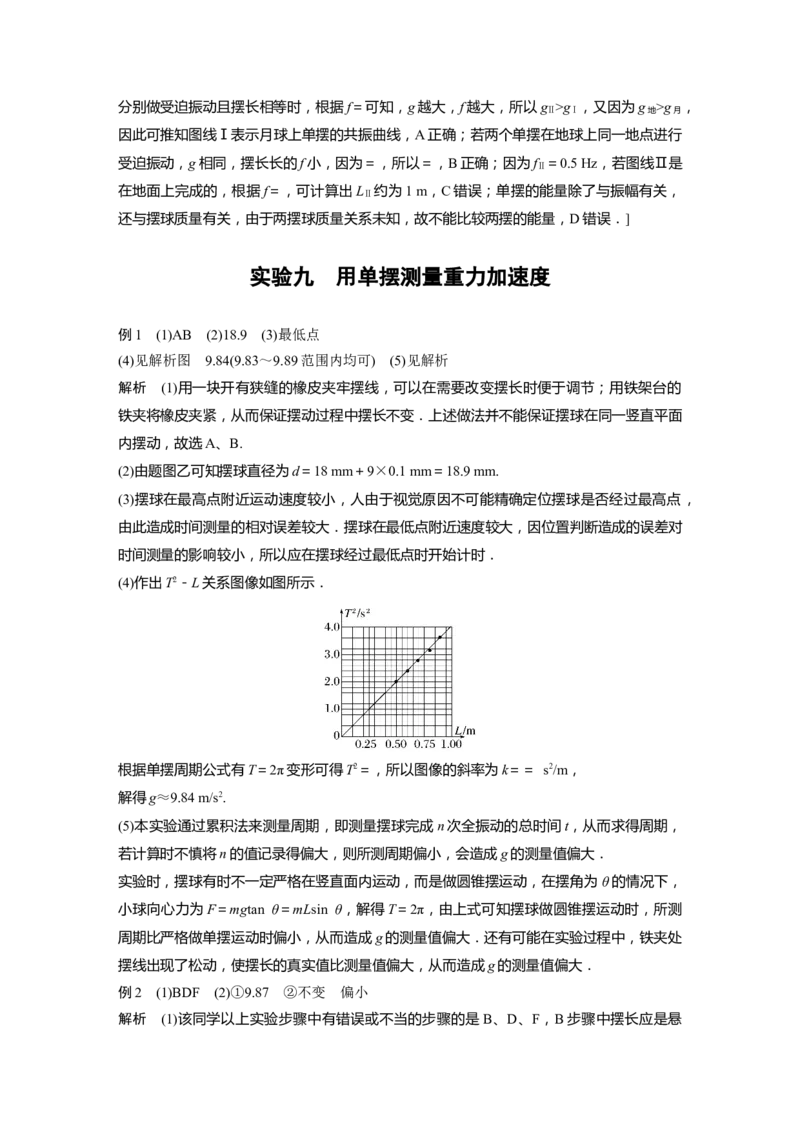
(4)作出T2-L关系图像如图所示.
根据单摆周期公式有T=2π变形可得T2=,所以图像的斜率为k== s2/m,
解得g≈9.84 m/s2.
(5)本实验通过累积法来测量周期,即测量摆球完成n次全振动的总时间t,从而求得周期,
若计算时不慎将n的值记录得偏大,则所测周期偏小,会造成g的测量值偏大.
实验时,摆球有时不一定严格在竖直面内运动,而是做圆锥摆运动,在摆角为 θ的情况下,
小球向心力为F=mgtan θ=mLsin θ,解得T=2π,由上式可知摆球做圆锥摆运动时,所测
周期比严格做单摆运动时偏小,从而造成g的测量值偏大.还有可能在实验过程中,铁夹处
摆线出现了松动,使摆长的真实值比测量值偏大,从而造成g的测量值偏大.
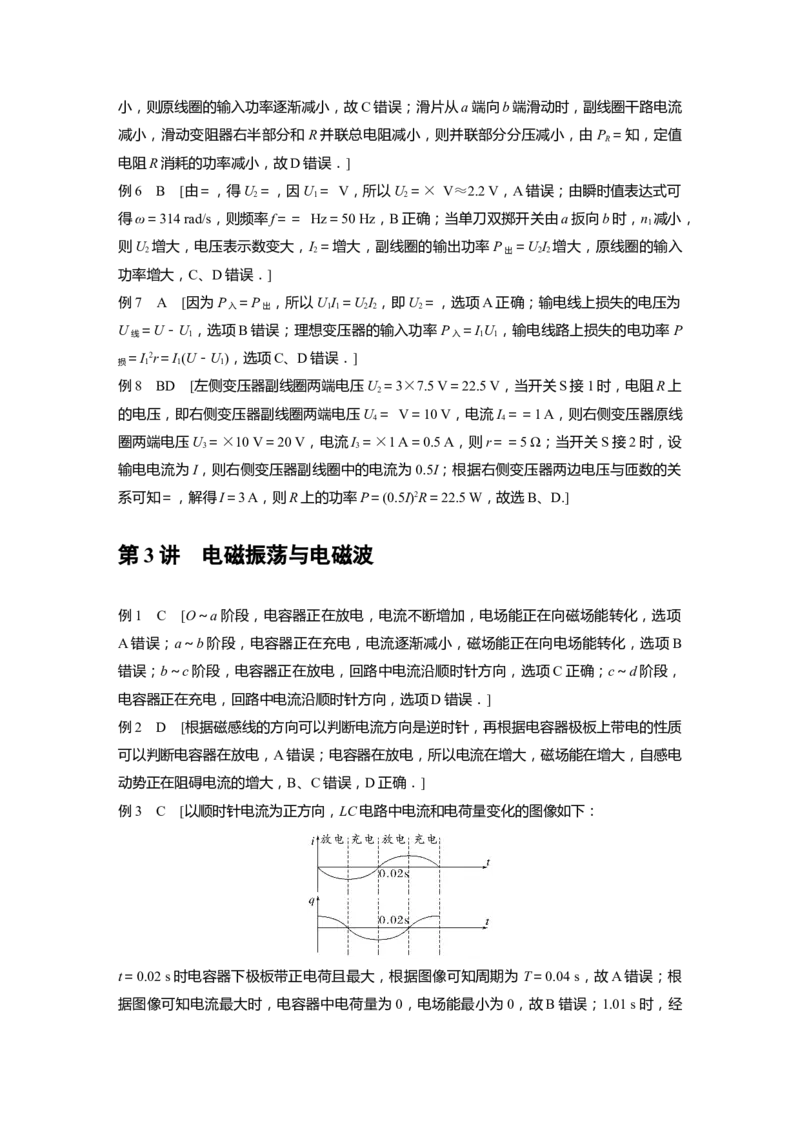
例2 (1)BDF (2)①9.87 ②不变 偏小
解析 (1)该同学以上实验步骤中有错误或不当的步骤的是B、D、F,B步骤中摆长应是悬点到大理石块重心的距离;D步骤中第30次经过最低点,则此单摆一共完成了15个全振动,
所以周期为T=;F步骤中必须先分别求出各组L和T值对应的g,再取所求得的各个g的
平均值.
(2)①图像的斜率k=2= s2/m=4 s2/m,所以加速度g=9.87 m/s2.
②根据T=2π得T2=,根据数学知识可知,T2-L图像的斜率k=,则当地的重力加速度g
=,由于图像不通过原点,则T2===+,根据数学知识可知,对于T2-L图像来说两种情
况下图像的斜率不变,所以测得的g值不变;经分析可知出现上述图像不过坐标原点的原因
是摆长测量值偏小,若利用g=计算,则求出的重力加速度g值与当地真实值相比偏小.
例3 (2) (3)
解析 (2)(3)滑板车做往复运动的周期T=,根据单摆的周期公式有T=2π,得R=.
第 2 讲 机械波
例1 D [由t=T时的波形图可知,波刚好传到质点P ,根据“上下坡”法,可知此时质
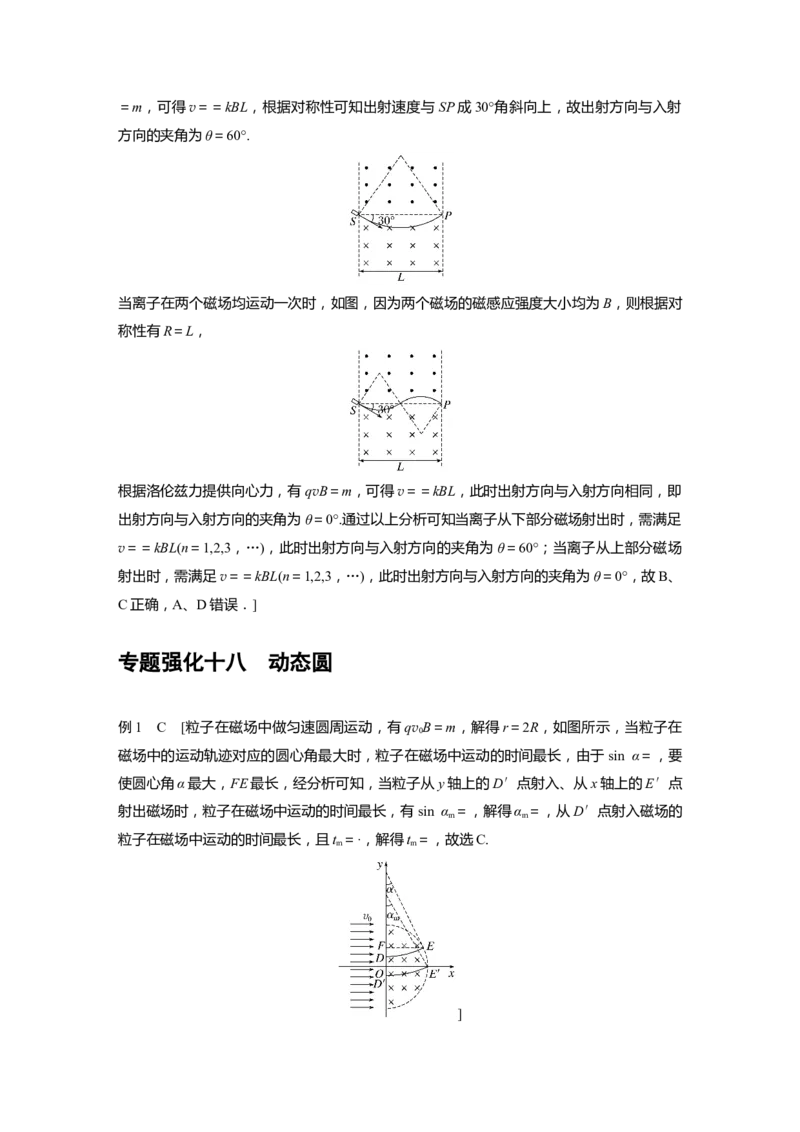
6
点P 沿y轴正方向运动,故波源起振的方向也沿y轴正方向,则t=0时,质点P 沿y轴正
6 0
方向运动,故A错误;由题图可知,在t=T时,质点P 处于正的最大位移处,故速度为零,
4
故B错误;由题图可知,在t=T时,质点P 沿y轴负方向运动,质点P 沿y轴正方向运动,
3 5
故两个质点的相位不相同,故C错误;由题图可知=2a,解得λ=8a,故该列绳波的波速为
v==,故D正确.]
例2 A [t=6 s时,c刚好开始振动,则传播速度为v== m/s=1 m/s,t=6 s时,质点a
第一次到达最高点,则有t=+,解得T=12 s,故A正确,B错误;波传播到b的时间t′
==4 s,则4 s时b开始振动,6 s时b振动T,b质点在向上运动,故C错误;若波源停止
振动,a、b、c三质点会继续振动一段时间,故D错误.]
例3 A [由波形图可知A=6 cm,λ=8 m,因为v=10 m/s,所以T==0.8 s,0~0.6 s时间
内,质点P运动的路程s=3A=18 cm,A正确;t=0.6 s时,即经过T,质点P恰好回到平
衡位置,相对平衡位置的位移为0,B错误;t=1.2 s=T时,质点Q处于平衡位置,加速度
为0,C错误;t=1.4 s=1T时,质点M处于波谷和平衡位置之间,正沿y轴正方向运动,D
错误.]
例4 C [由题图甲可得λ=8 m,由题图乙可得T=4 s,所以该简谐横波的波速为v==2
m/s,故A错误;由题图甲可知,t=5 s时,质点b位于平衡位置且向上振动,由题图乙可
知,5 s时该质点处于波峰位置,故B错误;由题图甲可知,质点c的振动方程为y=6sin(t
+π) cm,故C正确;t=5 s时质点a处于波峰位置,经过5 s=(1+)T,质点a运动到平衡位
置且向下振动,故D错误.]例5 AC [由O点的振动图像可知,周期为T=12 s,振幅A=20 cm,设原点处的质点的
振动方程为y=Asin(t+φ),将(0,10 cm)代入,有10 cm=20sin φ cm,解得φ=.在t=7 s时
刻y =20sin(×7+) cm=-10 cm≈-17.3 cm,因7 s=T+T,由题可知在t=7 s时刻质点在
7
y轴负半轴向下振动,根据“同侧法”可判断若波向右传播,则波形为C所示;若波向左传
播,则波形如A所示,故选A、C.]
例6 见解析
解析 (1)由题图可知λ=8 m.当波向右传播时,在Δt=t -t 时间内波传播的距离为s =nλ
2 1 1
+λ=(8n+3) m(n=0,1,2,…)
波速为v== m/s=(16n+6) m/s(n=0,1,2,…).
1
当波向左传播时,在Δt=t-t 时间内波传播的距离为
2 1
s=nλ+λ=(8n+5) m(n=0,1,2,…)
2
波速为v== m/s=(16n+10)m/s(n=0,1,2,…).
2
(2)若波速大小为74 m/s,在Δt=t -t 时间内波传播的距离为s′=v′·Δt=74×0.5 m=37
2 1
m,因为37 m=4λ+λ,所以波向左传播.
例7 (1)沿x轴负方向 10 m/s
(2)0.525 s
解析 (1)由题图可知,波长λ=3 m,振幅A=0.1 m,由t=0.2 s时刻到t =0.4 s时刻的时间
1
内,0.2 m-eφ=E ,即电子在a点的电势能大于在c点的电势能,D正确.]
pa a c pc
例5 AD [在匀强电场中,平行且相等的两线段电势差相等,可得φ -φ =φ -φ ,代入
B A C D
数据可得φ =0 ,故A正确,B错误;如图所示,将CD分为8等分,则每一等分对应1
D
cm,所以F点的电势为9 V,连接AF,过D点做AF的垂线DG,由几何关系可得DG的长
度为DG=,解得DG=3.6 cm,所以电场强度的大小为E= ,解得E=250 V/m,又因为D
点的电势为0,且D点距正极板的距离为20 cm,由对称性可知,两极板间的距离为40 cm,
所以两极板间的电势差为U=Ed=100 V ,故D正确,C错误.
]
例6 C [沿着电场线的方向电势降低,由K到A为逆着电场线方向,因此电势升高,A错
误;A和K之间的电场为非匀强电场,B错误;从A到K电势降低,若KA之间为匀强电场,
则A点与KA中点的电势差为U =U,由题图可知,越靠近A端电场线密度越大,即越靠
1
近A端电场强度越大,则A点与KA中点的电势差大于,C正确;电子由K运动到A的过
程中,静电力做正功,电势能减少了eU,D错误.]
例7 AD [等差等势面的疏密程度体现电场强度的大小,由题图可知N点的等差等势面比
M点更密,则N点的电场强度大小比M点的大,故A正确;沿着电场线电势逐渐降低,由
题图可知电场线由N指向Q,则Q为负电荷,故B错误;沿着电场线电势逐渐降低,结合
各等势面的电势高低关系可知M点的电场方向沿x轴正方向,故C错误;M点与N点电势均
为0 V,P点与N点的等势面有四个间隔,而相邻等势面的电势差为3 V,则P点与M点的
电势差为12 V,故D正确.]
例8 D [由于电场线垂直等势面,试探电荷所受静电力沿电场线切线方向且指向轨迹的凹
侧,试探电荷带正电,因此可以判断电场线的分布情况,如图所示,所以M点的电势低于
N点电势,故A错误;等差等势面的疏密表示电场强弱,所以M点的电场强度小于N点电
场强度,故B错误;由电势能与电势的关系E =qφ可知,带正电的粒子在电势越高的位置,
p
电势能越大,所以该试探电荷在M点的电势能小于在N点的电势能,又由能量守恒定律可
知,试探电荷在M点的动能大于在N点的动能,故C错误,D正确.
]
例9 D [由题图可知,a粒子的轨迹方向向右弯曲,a粒子所受静电力方向向右,b粒子的轨迹向左弯曲,b粒子所受静电力方向向左,由于电场线方向未知,无法判断粒子的电性,
故A错误;由题可知,a所受静电力逐渐减小,加速度逐渐减小,b所受静电力逐渐增大,
加速度增大,故C错误;已知MN=NQ,由于MN段电场强度大于NQ段电场强度,所以
MN两点电势差大小|U |大于NQ两点电势差大小|U |,故B错误;根据静电力做功公式W
MN NQ
=Uq,|U |>|U |,a粒子从等势线2到3静电力做的功小于b粒子从等势线2到1静电力做
MN NQ
的功,所以a粒子到达等势线3的动能变化量比b粒子到达等势线1的动能变化量小,故D
正确.]
专题强化十三 电场中功能关系及图像问题
例1 B [小球动能的增加量为ΔE =m(2v)2-mv2=mv2,A错误;小球在竖直方向上的分
k
运动为匀减速直线运动,到N时竖直方向的速度为零,则M、N两点之间高度差为h=,小
球重力势能的增加量为ΔE =mgh=mv2,C错误;静电力对小球做正功,则小球的电势能减
p
少,由能量守恒定律可知,小球减小的电势能等于重力势能与动能的增加量之和,则电势能
的减少量为ΔE′=mv2+mv2=2mv2,D错误;由功能关系可知,除重力外的其他力对小球
p
所做的功在数值上等于小球机械能的增加量,即2mv2,B正确.]
例2 D [物块从静止开始下落时的加速度为g,根据牛顿第二定律得:mg-qE=ma,解得:
E=,故A错误;从A到C的过程中,系统除重力和弹力以外,只有静电力做功,静电力做
功为:W=-qE(H+h)=-,可知机械能减少量为,故B错误;从A到C过程中,静电力做
功为-,则电势能增加量为,故C错误;根据动能定理得:mg(H+h)-+W =0,解得弹
弹
力做功为:W =-,即弹性势能增加量为,故D正确.]
弹
例3 (1)l (2)2mgl
解析 (1)物块落到斜面上A点时,速度方向与水平方向夹角为α,设此时速度为v,则v
=,
竖直速度v=vsin α,
y
平抛运动时间t=,
平抛过程中水平位移x=vt,
0
又有竖直位移y=,
平抛的位移s=,联立解得s=l.
(2)设物块沿斜面向下运动的最大位移为x′,自物块从A点开始向下运动到再次返回A点,
根据动能定理有-2μmgcos α·x′=0-mv2,解得x′=2l.物块位于最低点时,电势能最大,
物块自A点到最低点过程中,设静电力做功为W,根据动能定理有mgsin α·x′-μmgcos
α·x′-W=0-mv2,解得W=2mgl,即物块电势能的最大值为2mgl.例4 ABD [根据物块运动的v-t图像可知,小物块带正电,A正确;从v-t图像可知,
A、B两点的速度分别为v =6 m/s、v =4 m/s,再根据动能定理得 qU =mv 2-mv 2=
A B AB B A
×1×10-3×(42-62) J,解得U =-500 V,B正确;从v-t图像可知,由C到A的过程中,
AB
物块的速度一直增大,静电力对物块一直做正功,电势能一直减小,C错误;带电粒子在B
点的加速度最大,为 a = m/s2=2 m/s2,所受的静电力最大为F =ma =0.001×2 N=
m m m
0.002 N,则电场强度最大值为E == N/C=100 N/C,D正确.]
m
例5 BC [φ-x图像的斜率的绝对值表示电场强度的大小,斜率的正负表示电场强度的方
向,由题图可知,a、c两点电势相等,但电场强度大小和方向均不同,故A错误;由题图
可知,题图中d点图像斜率为零,表明该点的合电场强度为零,而d点到两点电荷q 、q 的
1 2
距离之比为2∶1,根据点电荷电场强度公式E=可得,q、q 电荷量之比为4∶1,故B正确;
1 2
a、c两点电势相等,电势差为零,负电荷从a点移到c点,静电力做功为零,故C正确;
c、d间电场方向向左,负电荷从c点移到d点,静电力做正功,电势能减小,故D错误.]
例6 D [若点电荷A、B带异种电荷,则在x轴上0~4d区间的电场方向唯一不变化,即
水平向右或水平向左,故A错误;由题图可知在x=d处电场强度为零,即=,解得=,故
B错误;0~d区间,电场方向沿x轴负方向,d~4d区间电场方向沿x轴正方向,可知0~
4d区间,从x=d处沿两侧电势降低,无限远处电势为零,故x=d处电势大于零;x≥4d的
区域内,电场方向指向x轴负方向,所以沿x轴负方向电势逐渐降低,无限远处电势为零,
故x≥4d的区域内的电势都小于零.所以x=d处电势最高且大于零,故C错误;x≥5d的区
域内电场方向沿x轴负方向,所以电子释放后受水平向右的力,静电力一直做正功,电势能
一直减小,故D正确.]
例7 D [E -x图像的斜率表示粒子所受静电力F,根据F=qE可知x 处电场强度最小且
p 1
为零,选项A错误;粒子在0~x 段切线的斜率发生变化,静电力发生变化,所以加速度也
2
在变化,做变速运动,x ~x 段斜率不变,所以做匀变速直线运动,选项 B错误;带负电的
2 3
粒子从x 到x 的过程中电势能增加,说明电势降低,即 φ>φ ,选项C错误;x ~x 段斜率
1 3 1 3 2 3
不变,所以这段电场强度大小、方向均不变,选项D正确.]第 3 讲 电容器
实验:观察电容器的充、放电现象
带电粒子在电场中的直线运动
例1 B [充电过程中,随着电容器C两极板电荷量的积累,电路中的电流逐渐减小,电容
器充电结束后,电流表示数为零,A错误;充电过程中,随着电容器C两极板电荷量的积累,
电压表测量电容器两端的电压,电容器两端的电压迅速增大,电容器充电结束后,最后趋于
稳定,B正确;电容器放电过程的I-t图像如图所示,可知电流表和电压表的示数不是均匀
减小至0的,C、D错误.
]
例2 (1)= (2)0.15 (3)<
解析 (1)题图乙中阴影面积S 和S 分别表示充电和放电中电容器上的总电荷量,所以两者
1 2
相等.
(2)由阴影面积代表电容器上的电荷量得q=S=1.203 C,U=E=8 V,则C== F≈0.15 F.
1
(3)由题图乙可知充电瞬间电流大于放电瞬间电流,且充电瞬间电源电压与放电瞬间电容器
两极板电压相等,由>,解得R<R.
1 2
例3 A [根据题意可知极板之间电压U不变,极板上所带电荷量Q变少,根据电容定义式
C=可知,电容器的电容C减小,D错误;根据电容的决定式C=可知,极板间距d增大,
极板之间形成匀强电场,根据E=可知,极板间电场强度E减小,B、C错误;极板间距d
增大,材料竖直方向尺度减小,A正确.]
例4 C [由C=,C=,E=,可得U=,E=,因为电容器与电源断开,电荷量保持不变,
两板间的距离d减小,所以两板间电压减小,两板间电场强度不变,试探电荷受到的静电力
不变,故B、D错误;因φ=Ed′,d′为P到负极板之间的距离,d′减小,所以P点电势
降低,因沿电场线方向电势降低,M板电势为零,所以P点电势为正,P点固定的试探电荷
为负电荷,电势降低,电势能增加,故C正确,A错误.]
例5 AD [保持开关S闭合,电容器两端的电势差不变,带正电的A板向B板靠近,极板间距离减小,电场强度E增大,小球所受的静电力变大,θ增大,故A正确,B错误;断开
开关S,电容器所带的电荷量不变,由C=,C=,E=得E=,知d变化,E不变,小球所
受静电力不变,θ不变,故C错误,D正确.]
例6 A [设电场强度为E,两粒子的运动时间相同,对电荷量为q的粒子有a =,l=·t2;
M
对电荷量为-q的粒子有a =,l=·t2,联立解得=,故选A.]
m
例7 (1) (2)3.5L
解析 (1)设小球A刚进入电场时的速度大小为v,由动能定理可得
0
2mg(L+)+|q |EL
B
=×2mv2-0,解得v=
0 0
(2)由动能定理可得
2mg(H+)+|q |EH-q E(H-L)=0-0,解得H=3.5L.
B A
例8 D [若电压如题图甲时,在0~T时间内,静电力先向左后向右,则电子先向左做匀
加速直线运动,后做匀减速直线运动,即静电力先做正功后做负功,电势能先减少后增加,
故A错误;电压如题图乙时,在0~T时间内,电子向右先加速后减速,即静电力先做正功
后做负功,电势能先减少后增加,故B错误;电压如题图丙时,电子向左先做加速运动,
过了T后做减速运动,到T时速度减为0,之后重复前面的运动,故电子一直朝同一方向运
动,故C错误;电压如题图丁时,电子先向左加速,到T后向左减速,T后向右加速,T后
向右减速,T时速度减为零,之后重复前面的运动,则电子做往复运动,故D正确.]
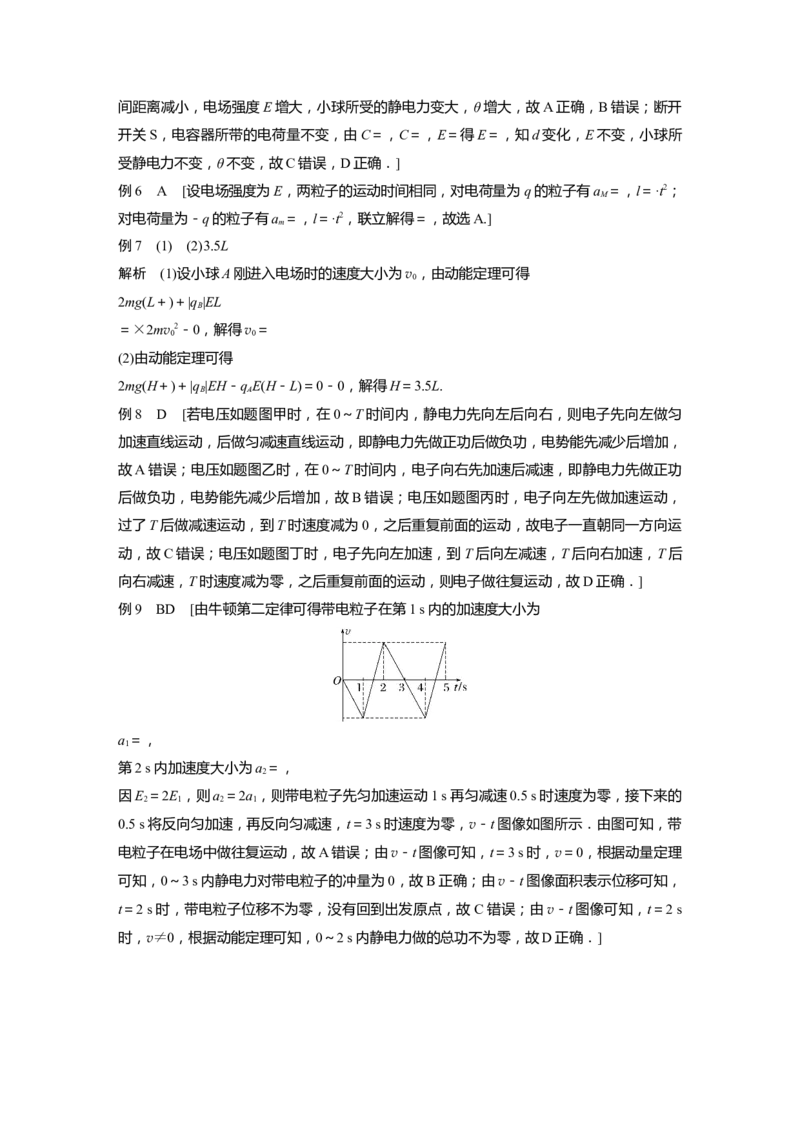
例9 BD [由牛顿第二定律可得带电粒子在第1 s内的加速度大小为
a=,
1
第2 s内加速度大小为a=,
2
因E =2E ,则a =2a ,则带电粒子先匀加速运动1 s再匀减速0.5 s时速度为零,接下来的
2 1 2 1
0.5 s将反向匀加速,再反向匀减速,t=3 s时速度为零,v-t图像如图所示.由图可知,带
电粒子在电场中做往复运动,故A错误;由v-t图像可知,t=3 s时,v=0,根据动量定理
可知,0~3 s内静电力对带电粒子的冲量为0,故B正确;由v-t图像面积表示位移可知,
t=2 s时,带电粒子位移不为零,没有回到出发原点,故C错误;由v-t图像可知,t=2 s
时,v≠0,根据动能定理可知,0~2 s内静电力做的总功不为零,故D正确.]第 4 讲 带电粒子在电场中的偏转
例1 D [对任一粒子,设其电荷量为q,质量为m,粒子在电场中做类平抛运动,水平方
向有 x=vt,竖直方向有y=at2=··,若初速度相同,水平位移x相同时,由于α粒子的比
0
荷比质子的小,则α粒子的偏转距离y较小,所以α粒子从BC边离开,由t=知两个粒子在
电场中的运动时间相等,由Δv=at=t,知Δv∝,则质子和α粒子经过电场的过程中速度增
量之比为2∶1,故A、B错误;粒子经过电场的时间为t=,若初动能相同,质子的初速度
较大,则质子的运动时间较短,故C错误;由y=··,E =mv2得y=,若初动能相同,已知
k 0
x相同,则y∝q,根据动能定理知:经过电场的过程中动能增量 ΔE =qEy,E相同,则
k
ΔE∝q2,则质子和α粒子经过电场的过程中动能增量之比为1∶4,故D正确.]
k
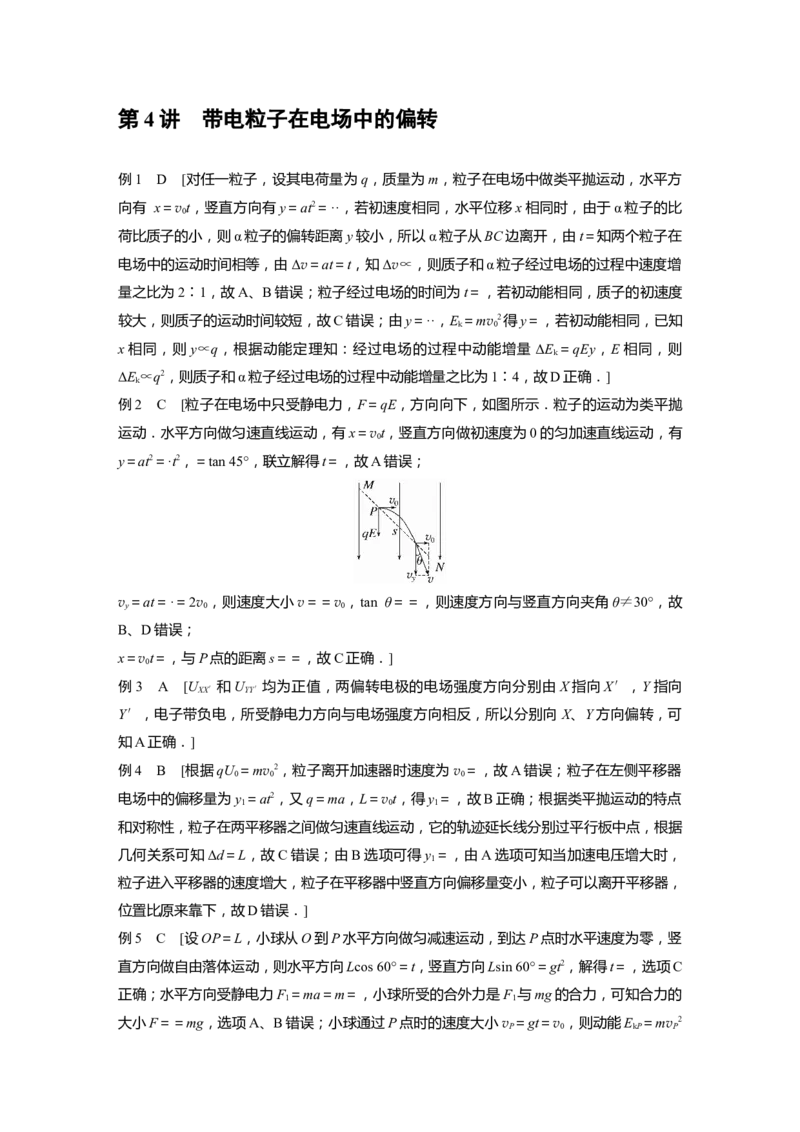
例2 C [粒子在电场中只受静电力,F=qE,方向向下,如图所示.粒子的运动为类平抛
运动.水平方向做匀速直线运动,有x=vt,竖直方向做初速度为0的匀加速直线运动,有
0
y=at2=·t2,=tan 45°,联立解得t=,故A错误;
v=at=·=2v ,则速度大小v==v ,tan θ==,则速度方向与竖直方向夹角θ≠30°,故
y 0 0
B、D错误;
x=vt=,与P点的距离s==,故C正确.]
0
例3 A [U 和U 均为正值,两偏转电极的电场强度方向分别由X指向X′,Y指向
XX′ YY′
Y′,电子带负电,所受静电力方向与电场强度方向相反,所以分别向 X、Y方向偏转,可
知A正确.]
例4 B [根据qU =mv2,粒子离开加速器时速度为v =,故A错误;粒子在左侧平移器
0 0 0
电场中的偏移量为y =at2,又q=ma,L=vt,得y =,故B正确;根据类平抛运动的特点
1 0 1
和对称性,粒子在两平移器之间做匀速直线运动,它的轨迹延长线分别过平行板中点,根据
几何关系可知Δd=L,故C错误;由B选项可得y =,由A选项可知当加速电压增大时,
1
粒子进入平移器的速度增大,粒子在平移器中竖直方向偏移量变小,粒子可以离开平移器,
位置比原来靠下,故D错误.]
例5 C [设OP=L,小球从O到P水平方向做匀减速运动,到达P点时水平速度为零,竖
直方向做自由落体运动,则水平方向Lcos 60°=t,竖直方向Lsin 60°=gt2,解得t=,选项C
正确;水平方向受静电力F=ma=m=,小球所受的合外力是F 与mg的合力,可知合力的
1 1
大小F==mg,选项A、B错误;小球通过P点时的速度大小v =gt=v ,则动能E =mv 2
P 0 kP P=mv2,选项D错误.]
0
例6 (1) (2)2m(v2+g2t2)
0
解析 (1)设电场强度的大小为E,小球B运动的加速度为a.根据牛顿第二定律、运动学公式
和题给条件,
有mg+qE=ma①
a()2=gt2②
解得E=③
(2)设B从O点发射时的速度为v ,到达P点时的动能为E ,O、P两点的高度差为h,根据
1 k
动能定理有
mgh+qEh=E-mv2④
k 1
且有v·=vt⑤
1 0
h=gt2⑥
联立③④⑤⑥式得E=2m(v2+g2t2).
k 0
例7 见解析
解析 (1)由动能定理得
e=mv2-mv2
0
解得v=.
(2)t=0时刻射入的电子,在垂直于极板方向上做匀加速运动,向 A极板方向偏转,半个周
期后电场方向反向,电子在该方向上做匀减速运动,再经过半个周期,电子在电场方向上的
速度减小到零,此时的速度等于初速度v,方向平行于极板,以后继续重复这样的运动;要
0
使电子恰能平行于极板飞出,则电子在OO′方向上至少运动一个周期,故极板长至少为L
=vT.
0
(3)若要使电子沿OO′平行于极板飞出,则电子在电场方向上应先加速、再减速,减速到零
后反向加速、再减速,每阶段时间相同,一个周期后恰好回到 OO′上,可见应在t=+k(k
=0,1,2,…)时射入,极板间距离要满足电子在加速、减速阶段不打到极板上,设两板间距
为d,由牛顿第二定律有a=,加速阶段运动的距离s=·2≤,解得d≥T,故两极板间距至少
为T.
例8 (1)13.5 cm (2)30 cm
解析 (1)设电子经电压U 加速后的速度为v,根据动能定理得eU=mv2,设电容器间偏转
0 0 0 0
电场的场强为E,则有E=,
设电子经时间t通过偏转电场,偏离轴线的侧向位移为y,则沿中心轴线方向有t=,垂直中
心轴线方向有a=,联立解得y=at2==,
设电子通过偏转电场过程中产生的侧向速度为v,偏转角为θ,则电子通过偏转电场时有v
y y=at,tan θ=,则电子在荧光屏上偏离O点的距离为Y=y+Ltan θ=,由题图乙知t=0.06 s
时刻,U=1.8U,
0
解得Y=13.5 cm.
(2)由题知电子偏移量y的最大值为,根据y=可得,当偏转电压超过2U 时,电子就打不到
0
荧光屏上了,所以代入得Y =,所以荧光屏上电子能打到的区间长度为2Y =3L=30 cm.
max max
专题强化十四 带电粒子在电场中的力电综合问题
例1 BD [因为小球运动到最高点时,细线受到的拉力最大,可知重力和静电力的合力(等
效重力)方向向上,则静电力方向向上,且静电力大于重力,小球带负电,故 A错误,B正
确;因重力和静电力的合力方向向上,可知小球运动到最高点时速度最大,故C错误;由
于等效重力竖直向上,所以小球运动到最低点时速度最小,最小速度满足qE-mg=m,即v
=,故D正确.]
例2 AD [因为重力与静电力均为恒力,所以二者的合力大小为F==1 N,与竖直方向夹
角正切值tan θ==,解得θ=37°,重力与静电力合力指向AO,A为等效最高点,根据等时
圆模型,小环在弦轨道AB和AC上运动时间相等,A正确;等效最低点是AO延长线与圆环
轨道交点,而非C点,等效最低点速度最大,动能最大,B错误;因为小环穿在圆环轨道上
且恰好能做完整的圆周运动,则小环在等效最高点A速度最小为零,在A点动能最小也为
零,C错误;小环在等效最低点时速度最大,动能最大,小环对圆环轨道压力也最大,从等
效最高点至等效最低点过程中,由动能定理得 F·2R=mv 2-0,由牛顿第二定律得F -F=
m N
m,代入数据解得F =5 N,由牛顿第三定律,小环做圆周运动的过程中对圆环的最大压力
N
是5 N,D正确.]
例3 (1)1.25 m (2)4.8 N (3)与圆心的连线与竖直方向夹角为45°
0.93 J
解析 (1)物块恰能通过轨道最高点L的条件是mg=m,
代入数据解得v =2 m/s
L
设A到N的距离为s,对A到L过程中根据动能定理得
qEs-μmgs-mg·2R=mv 2-0
L
代入数据解得s=1.25 m
(2)物块由P到L过程根据动能定理得-mgR-qER=mv 2-mv 2
L P
解得v =2 m/s
P
在P点根据牛顿第二定律得
F -qE=m
N代入数据解得F =4.8 N.
N
(3)如图所示,当合力的反方向延长线过圆心时动能最大,设该点为B,过B的半径与竖直方
向间的夹角为θ,则tan θ==1,θ=45°.从A到B,由动能定理得qE(s+Rsin θ)-μmgs-
mgR(1-cos θ)=E ,解得E =(0.48+0.32) J≈0.93 J.
km km
例4 C [设带电环所带电荷量为q,初速度为v ,底座锁定时电容器极板间电场强度为
0
E,则由功能关系有qEd=mv2,底座解除锁定后,两极板间距离变为原来的2倍,极板间
0
电场强度大小不变,电容器及底座在带电环作用下一起向左运动,当与带电环共速时,带电
环到达进入电容器后的最远位置,整个过程满足动量守恒,则有 mv =3mv ,再由功能关系
0 1
有qEd′=mv2-×3mv2,联立解得 d′=d,故选C.]
0 1
例5 D [假设B所受静电力沿斜面向下,当施加外力时,对B分析可知F-mgsin θ-F
电
=0,解得F =2mgsin θ,假设成立,故B带负电,故A错误;当B受到的合力为零时,B
电
的速度最大,由kx=F +mgsin θ,解得x=,故B错误;当撤去外力瞬间,弹簧弹力还来
电
不及改变,即弹簧的弹力仍为零,对物体A、B分析可知F =F +mgsin θ=(m+2m)a,
合 电
解得a=gsin θ,故C错误;设物体B的最大速度为v ,由功能关系可得·3mv 2+kx2=
m m
mgxsin θ+F x,解得v =gsin θ,故D正确.]
电 m
例6 (1)mv2+qh v
0 0
(2)2v
0
解析 (1)PG、QG间电场强度大小相等,均为E.粒子在PG间所受静电力F的方向竖直向下,
设粒子的加速度大小为a,有E=①
F=qE=ma②
设粒子第一次到达G时动能为E,由动能定理有qEh=E-mv2③
k k 0
设粒子第一次到达G时所用的时间为t,粒子在水平方向的位移为l,则有h=at2④
l=vt⑤
0
联立①②③④⑤式解得
E=mv2+qh
k 0
l=v
0
(2)若粒子穿过G一次就从电场的右侧飞出,则金属板的长度最短.由对称性知,此时金属
板的长度为L=2l=2v.
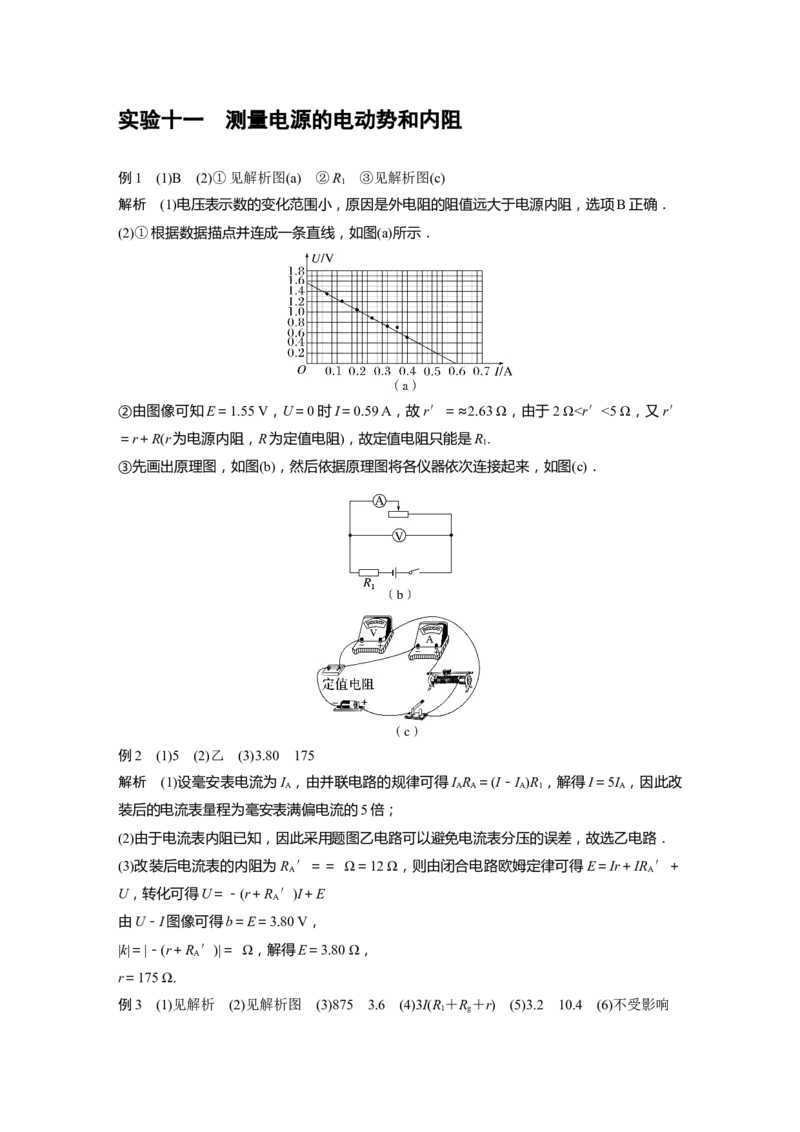
0第十章 电路及应用
第 1 讲 电路的基本概念及规律
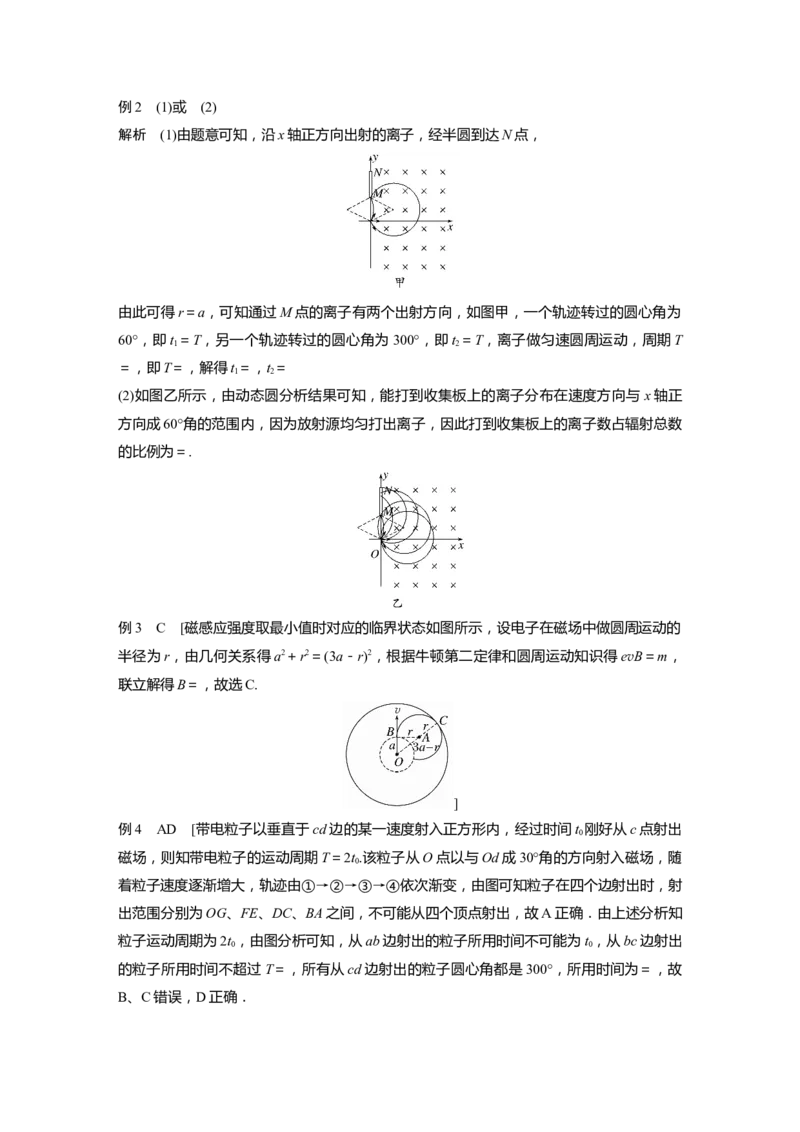
例1 D [电流的方向与正离子定向移动方向相同,则溶液内电流方向从A到B,t时间内
通过溶液截面S的电荷量为q=ne+ne,则根据电流的定义式可得I===,A、B、C错误,
1 2
D正确.]
例2 B [电子定向移动,由平衡条件得kv=e,则U=,导体中的电流I=neSv,电阻R=
=,选项B正确.]
例3 C [由题图可知,U越大,小灯泡的电阻越大,故A说法正确;R=中的U、I与小灯
泡所处状态下的电压、电流相对应,故B说法正确,C说法错误;对应P点,小灯泡的功率
P=UI,与题图中PQOM所围的面积相等,故D说法正确.]
1 2
例4 A [由题图可知导线x两端的电压U =6 V,导线y两端的电压U =2 V,由串联电路
1 2
特点可知,x和y两导线的电阻之比为R∶R =U∶U =3∶1,故B、C错误;由R=ρ可知,
1 2 1 2
x和y两导线的横截面积之比S∶S=·=1∶6,故A正确,D错误.]
1 2
例5 A [当a、b两端接入电压时,根据欧姆定律得20 V=R,解得R∶R=2∶1;当c、
2 1 2
d两端接入电压时,有50 V=R ,解得R∶R =2∶1,联立得R∶R∶R =4∶2∶1,故A
2 2 3 1 2 3
正确,B、C、D错误.]
例6 AD [电流表A 与电流表A 由相同表头与不同电阻并联改装而成,并联在电路中,
1 2
电流表A 与电流表A 的指针偏转角相同,电流表A 的量程较大,则电流表A 的读数较大,
1 2 1 1
A正确,B错误;电压表V 与电压表V 由相同表头与不同电阻串联改装而成,串联在电路
1 2
中,通过表头的电流相同,故指针的偏转角相同,因V 量程较大,所以电压表V 的读数大
1 1
于电压表V 的读数,C错误,D正确.]
2
例7 20 80 50
解析 使用OA接线柱时,量程为0~3 A,
则有I =3 A=I+
OA g
使用OB接线柱时,量程为0~0.6 A,
则有I =0.6 A=I+
OB g
其中I=0.3 A,R=100 Ω
g g
联立解得R=20 Ω,R=80 Ω
1 2
使用OC接线柱时,量程为0~60 V,
则有U =60 V=I +I R,解得R=50 Ω.
OC OB OB 3 3例8 A [因R 与R 串联,电流相等,且消耗的功率相等,根据P=I2R可知R =R ;因R
1 2 1 2 1
和R 与R 并联,支路电压相等,上面支路的功率等于R 功率的2倍,根据P=可知,R =
2 3 3 3
2(R+R)=4R,即R∶R∶R=1∶1∶4,选项A正确.]
1 2 1 1 2 3
例9 (1)0.6 W (2)6 J (3)5 Ω
解析 (1)电动机的输入功率为
P =UI=3×0.2 W=0.6 W
入
(2)物体被匀速提升的速度
v== m/s=0.1 m/s
电动机提升物体的机械功率
P =Fv=Gv=0.4 W
机
根据能量关系有P =P +P
入 机 Q
产生的热功率
P =0.2 W
Q
电动机线圈在30 s内产生的热量
Q=P t=0.2×30 J=6 J
Q
(3)由焦耳定律得Q=I2Rt
电动机线圈电阻R=5 Ω.
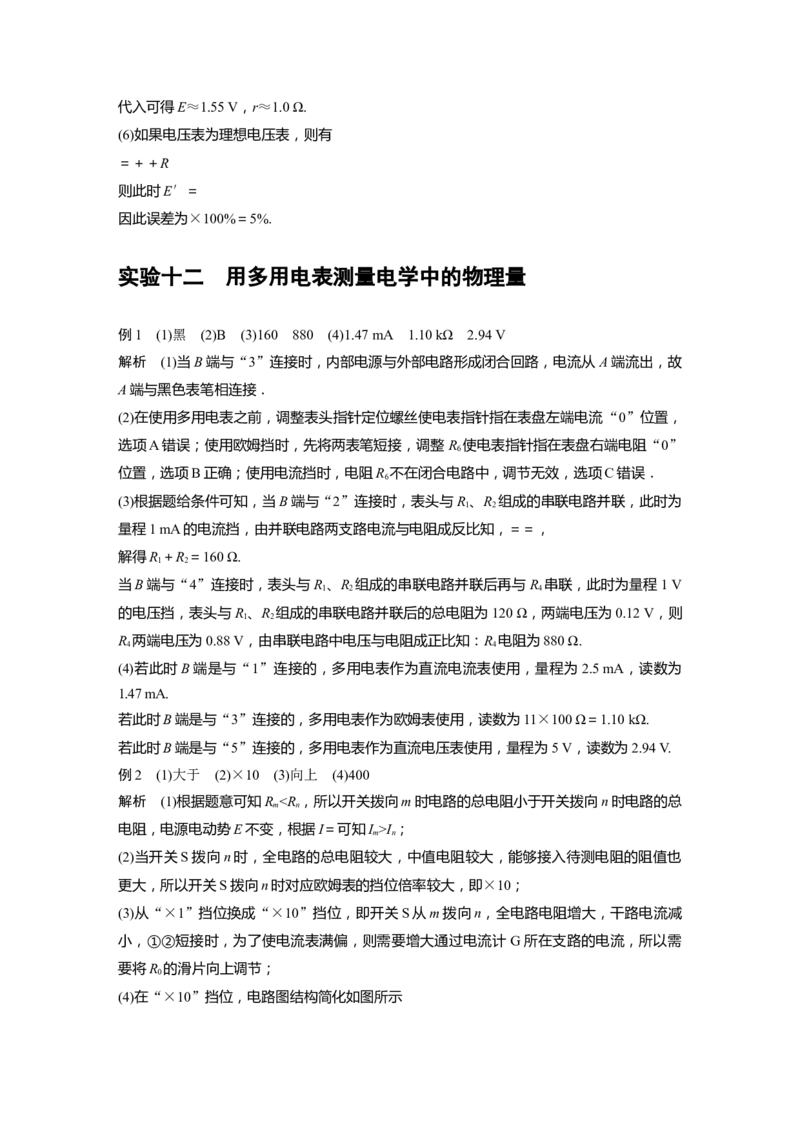
第 2 讲 闭合电路的欧姆定律
例1 A [当断开S后,电压表的读数等于电源的电动势,即E=3 V;当闭合S后,有U=
IR,又由闭合电路欧姆定律可知,I=,联立解得r=1 Ω,A正确,B、C、D错误.]
例2 AD [当照射到R 的光照强度减小时,R 的阻值增大,回路中的总电阻增大,干路电
0 0
流减小,即电流表示数减小,A正确;干路电流减小,由U =Ir,可知内电压减小,U=E
内
-U ,则路端电压增大,即电压表示数增大,B错误;干路电流减小,即流经R 的电流减
内 1
小,R 两端电压减小,又知电压表示数增大,故R 两端电压增大,流经R 的电流增大,则
1 2 2
流经灯泡的电流减小,灯泡变暗,C错误;路端电压U增大,根据η=×100%,电源的效
率η增大,D正确.]
例3 B [若R 短路,则电压表V 示数为零,两电压表示数不相同;若R 断路,则电压表
3 2 P
V 示数为零,两电压表示数不相同;若R 短路,则V 测滑动变阻器和R 串联的总电压,V
2 1 1 2 2
测R 两端电压,两电压表示数不同;若R 断路,则两电压表均测R 两端电压,两电压表示
2 2 3
数相同且不为零,A、C、D错误,B正确.]
例4 C [由U =6 V可知电源完好,灯泡都不亮,说明电路中出现断路故障,由U =6 V
ab cd可知,灯泡L 与滑动变阻器R完好,断路故障出现在c、d之间,故灯泡L 的灯丝烧断了,
1 2
选项C正确.]
例5 ABD [在a、b、c三条图线上分别取横坐标相同的A、B、C三点,因为直流电源的
总功率P 等于输出功率P 和电源内部的发热功率P 之和,所以这三点的纵坐标一定满足关
E R r
系P=P +P ,故A正确;图线c表示电路的输出功率与电流的关系图线,很显然,最大输
A B C
出功率小于3 W,故C错误;当内电阻和外电阻相等时,即为b、c图线的交点处电源输出
的功率最大,此时电流的大小为=,输出功率的大小为,a、b图线的交点表示电源的总功
率P 和电源内部的发热功率P 相等,此时电源短路,所以此时电流的大小为,功率的大小
E r
为,所以横坐标之比为1∶2,纵坐标之比为1∶4,故B正确;当I=3 A时,P =0,说明
R
外电路短路,根据P =EI知电源的电动势E=3 V,内电阻r==1 Ω,故D正确.]
E
例6 (1)0 8 W (2)1.5 Ω 6 W (3)9 W
解析 (1)保护电阻消耗的电功率为P =,因R 和r是常量,而R是变量,故R最小时,P
0 0 0
最大,即R=0时,P == W=8 W.
0max
(2)把保护电阻R 看作电源内阻的一部分,当R=R +r,即R=0.5 Ω+1 Ω=1.5 Ω时,电阻
0 0
箱R消耗的功率最大,P == W=6 W.
Rmax
(3)由P =()2R =可知,当R =r时,P 最大,即R=r-R =0.5 Ω时,P == W=9
出 外 外 出 0 出max
W.
例7 AC [由题图甲知,电压表V 测量路端电压,电流增大时,内电压增大,路端电压减
2
小,所以图线①为V 的读数随电流表读数的变化图线,故A正确;图线①的斜率绝对值等
2
于电源的内阻,为r== Ω=2 Ω,当电流I =0.1 A时,U =3.4 V,则电源的电动势E=U
1 1 1
+Ir=(3.4+0.1×2) V=3.6 V,故B错误;当I =0.3 A时,U =3 V,此时电动机输入功率
1 2 2
最大,且P=UI =3×0.3 W=0.9 W,故C正确;若电流表A示数小于0.2 A,电动机不转
2 2
动,电动机的电阻r =4 Ω,当I =0.1 A时,电路中电流最小,滑动变阻器的电阻为最大值,
M 1
所以R与R 并联电阻的最大值R =-r-r =(-2-4) Ω=30 Ω,则滑动变阻器的最大阻值
0 并 M
大于30 Ω,故D错误.]
例8 C [S断开时等效电路图如图甲所示.
甲
电容器两端电压为U=×R×=E;
1
S闭合时等效电路图如图乙所示.乙
电容器两端电压为U=×R=E,
2
由Q=CU得==,故选项C正确.]
例9 AD [只逐渐增大R 的光照强度,R 的阻值减小,外电路总电阻减小,总电流增大,
1 1
电阻R 消耗的电功率变大,滑动变阻器R 两端的电压变大,电容器两端的电压增大,电容
0 2
器下极板的带电荷量变大,所以电阻R 中有向上的电流,故选项A正确;电路稳定时,电
3
容器所在支路相当于断路,只将滑动变阻器R 的滑动端P 向上端移动时,对电路没有影响,
3 2
故选项B错误;只将滑动变阻器R 的滑动端P 向下端移动时,电容器并联部分的电阻变大,
2 1
所以电容器两端的电压变大,分析可知带电微粒受到向上的静电力,由E=可知电场强度变
大,带电微粒向上运动,故选项C错误;若断开开关S,电容器处于放电状态,电荷量变小,
板间电场强度减小,带电微粒所受的静电力减小,带电微粒向下运动,故选项D正确.]
专题强化十五 电学实验基础
例1 (1)17.7 23.85 3.18
(2)4.039 1.100 3.515
解析 (1)题图最上面游标卡尺:主尺读数为17 mm,游标尺读数为7×0.1 mm=0.7 mm,最
后结果是17 mm+0.7 mm=17.7 mm.
题图中间游标卡尺:主尺读数为23 mm,游标尺读数为17×0.05 mm=0.85 mm,最后结果
是23 mm+0.85 mm=23.85 mm.
题图最下面游标卡尺:主尺读数为3 mm,游标尺读数为9×0.02 mm=0.18 mm,最后结果
是3 mm+0.18 mm=3.18 mm.
(2)甲:(4+3.9×0.01) mm=4.039 mm;
乙:(1+10.0×0.01) mm=1.100 mm;
丙:(3+0.5+1.5×0.01) mm=3.515 mm.
例2 (1)0.02 0.44 0.1 2.20
(2)0.1 1.70 0.5 8.5 (3)1 987
将“×1 k”挡旋钮调到2,再将“×100”挡旋钮调到0
0~19 998 Ω
解析 (1)电流表使用0.6 A量程时,刻度盘上的每一小格为0.02 A,表针示数为0.44 A;当使用3 A量程时,每一小格为0.1 A,表针示数为2.20 A.
(2)电压表使用3 V量程时,每小格表示0.1 V,表针示数为1.70 V;使用15 V量程时,每小
格表示0.5 V,表针示数为8.5 V.
(3)电阻为1 987 Ω.最简单的操作方法是先将“×1 k”挡旋钮调到2,再将“×100”挡旋钮
调到0.每个电阻箱的最大阻值是9 999 Ω,用这样的两个电阻箱串联可得到的最大电阻是
2×9 999 Ω=19 998 Ω,故用两个这样的电阻箱,可得到的电阻范围为0~19 998 Ω.
例3 (1)O、P (2)Ⅰ 50.5
(3)50.0
解析 (1)若通过R 的电流相等,由题图(b)知图线Ⅰ对应的电压值较大,由R=可知图线Ⅰ
x
所测电阻较大,图线Ⅱ所测电阻较小,则图线Ⅱ是采用电压表跨接在O、P两点的方案测量
得到的.
(2)由题图(b)可得图线Ⅰ测得电阻阻值 R = Ω≈50.5 Ω,图线Ⅱ测得电阻阻值 R =
Ⅰ Ⅱ
Ω≈46.6 Ω,待测电阻阻值约为50 Ω,==20,==100,因<,电流表采用内接法更接近待
测电阻的真实值,电压表跨接在O、Q两点,故图线Ⅰ得到的结果更接近待测电阻的真实值,
测量结果为50.5 Ω.
(3)电压表跨接在O、Q之间,测得的阻值为电阻与电流表内阻之和,则R=R -R =(50.5
Ⅰ A
-0.5) Ω=50.0 Ω.
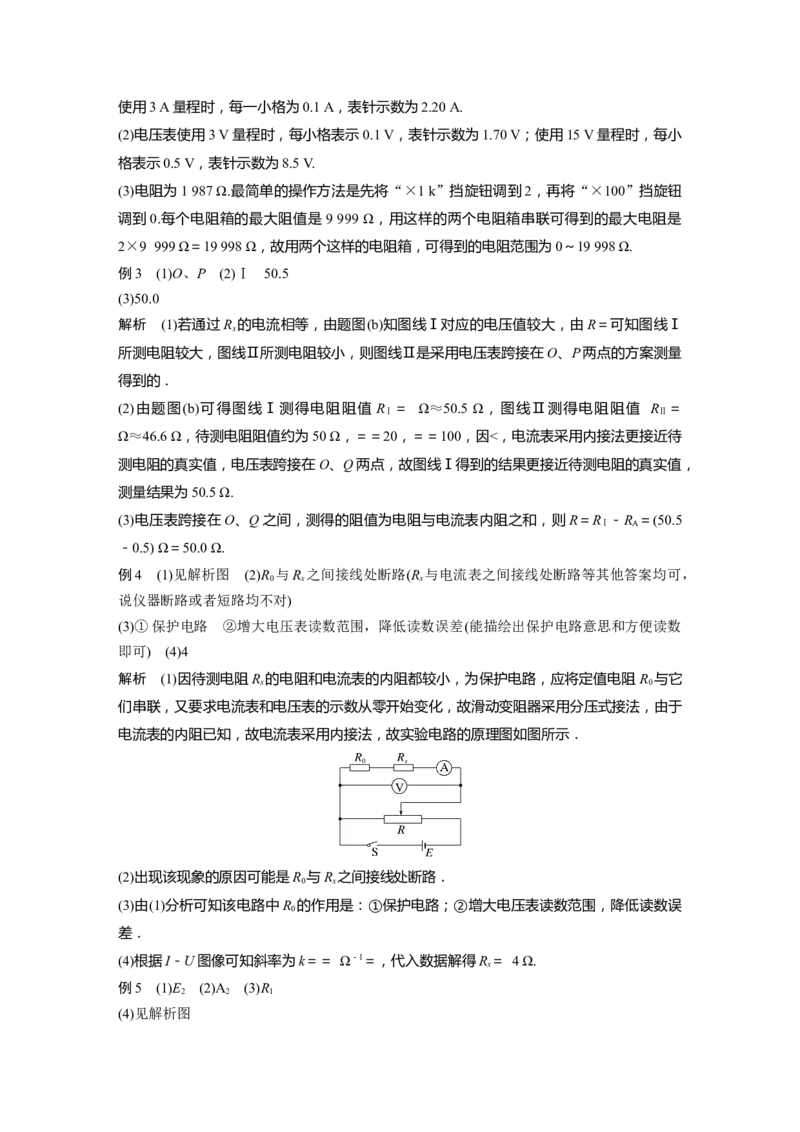
例4 (1)见解析图 (2)R 与R 之间接线处断路(R 与电流表之间接线处断路等其他答案均可,
0 x x
说仪器断路或者短路均不对)
(3)①保护电路 ②增大电压表读数范围,降低读数误差(能描绘出保护电路意思和方便读数
即可) (4)4
解析 (1)因待测电阻R 的电阻和电流表的内阻都较小,为保护电路,应将定值电阻R 与它
x 0
们串联,又要求电流表和电压表的示数从零开始变化,故滑动变阻器采用分压式接法,由于
电流表的内阻已知,故电流表采用内接法,故实验电路的原理图如图所示.
(2)出现该现象的原因可能是R 与R 之间接线处断路.
0 x
(3)由(1)分析可知该电路中R 的作用是:①保护电路;②增大电压表读数范围,降低读数误
0
差.
(4)根据I-U图像可知斜率为k== Ω-1=,代入数据解得R= 4 Ω.
x
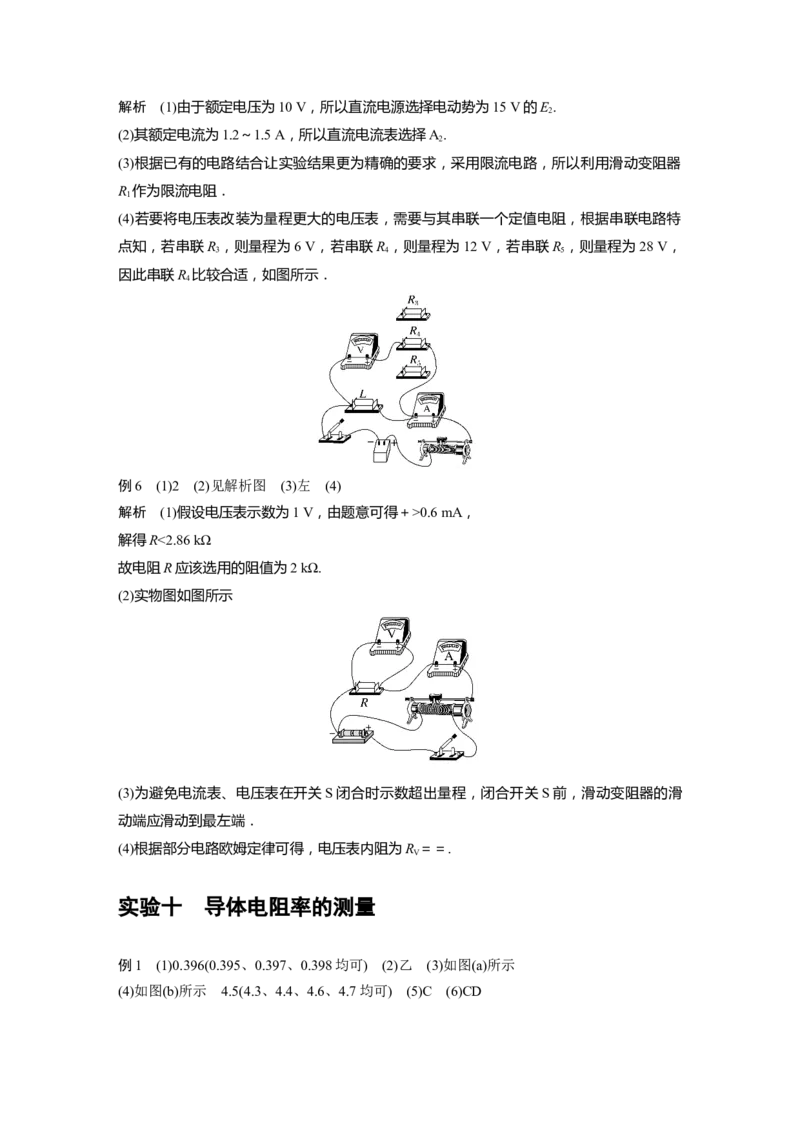
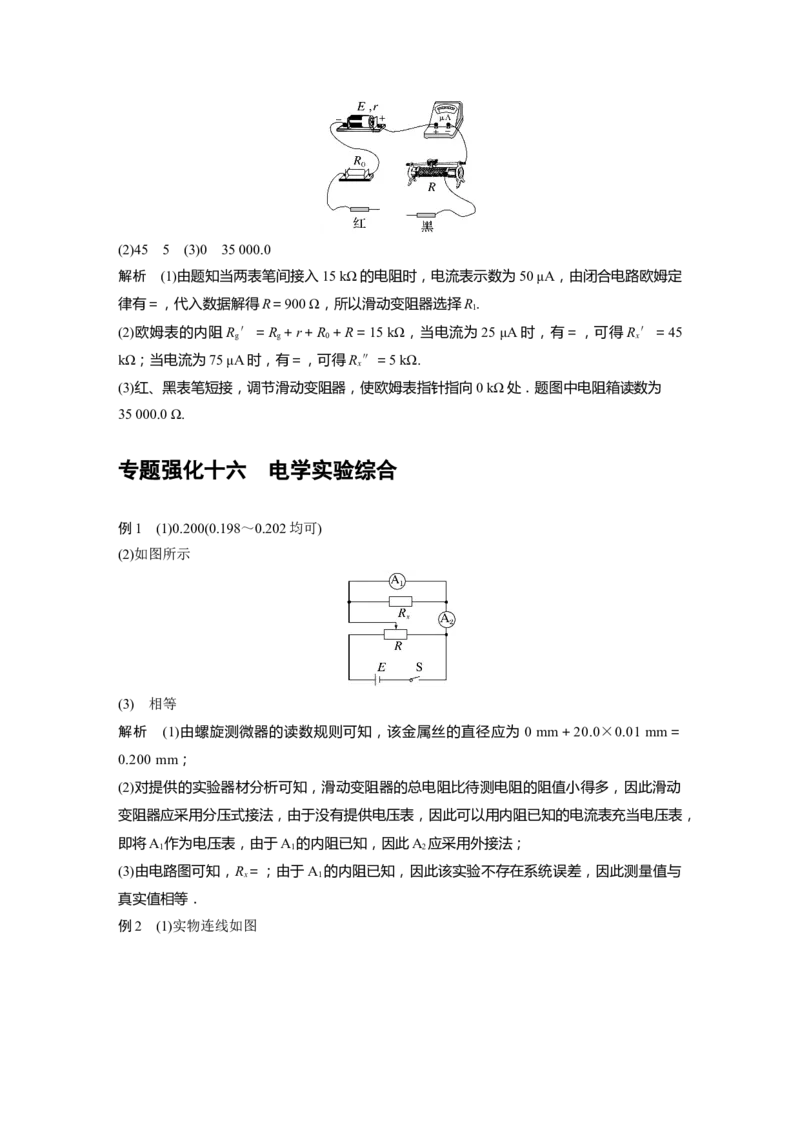
例5 (1)E (2)A (3)R
2 2 1
(4)见解析图解析 (1)由于额定电压为10 V,所以直流电源选择电动势为15 V的E.
2
(2)其额定电流为1.2~1.5 A,所以直流电流表选择A.
2
(3)根据已有的电路结合让实验结果更为精确的要求,采用限流电路,所以利用滑动变阻器
R 作为限流电阻.
1
(4)若要将电压表改装为量程更大的电压表,需要与其串联一个定值电阻,根据串联电路特
点知,若串联R ,则量程为6 V,若串联R ,则量程为12 V,若串联R ,则量程为28 V,
3 4 5
因此串联R 比较合适,如图所示.
4
例6 (1)2 (2)见解析图 (3)左 (4)
解析 (1)假设电压表示数为1 V,由题意可得+>0.6 mA,
解得R<2.86 kΩ
故电阻R应该选用的阻值为2 kΩ.
(2)实物图如图所示
(3)为避免电流表、电压表在开关S闭合时示数超出量程,闭合开关S前,滑动变阻器的滑
动端应滑动到最左端.
(4)根据部分电路欧姆定律可得,电压表内阻为R ==.
V
实验十 导体电阻率的测量
例1 (1)0.396(0.395、0.397、0.398均可) (2)乙 (3)如图(a)所示
(4)如图(b)所示 4.5(4.3、4.4、4.6、4.7均可) (5)C (6)CD例2 (1)B C (2)不同 (3)见解析图 (4)见解析图 (5)23.5(23.0~24.0都算对)
解析 (1)A起固定作用,便于读数;B为粗调,调节B使电阻丝与测微螺杆、测砧刚好接触;
然后调节C,C起微调作用.
(2)电阻丝的粗细不一定均匀,为保证测量结果准确,应在不同位置测直径,然后取平均值
作为测量值.
(3)滑动变阻器采用分压式接入电路,注意线不能交叉,如图所示.
(4)将所给的5组数据标注在U-I图像中,用过原点的直线把它们连在一起,让尽可能多的
点在直线上,如图所示.
(5)由题意知=R+R +R ,由U -I 图线的斜率可得R+R +R =49.0 Ω.=R +R ,由作出
x A 0 1 1 x A 0 A 0
的U-I 图线的斜率可得R +R=25.5 Ω,故R=23.5 Ω.
2 2 A 0 x
例3 (1)0~20 Ω
(2)1.32(1.31~1.34均可)(3)9.9×10-7(9.6×10-7~1.0×10-6均可)
(4)小于
解析 (1)由实验原理可知R=,而由-l图像可知待测电阻最大约为8 Ω,为了使电压表有
x
明显的读数变化,则滑动变阻器的阻值不能太大,故选0~20 Ω比较合适;
(2)电压表的量程为3 V,其分度值为0.1 V,估读到0.01 V,
则读数为1.32 V(1.31~1.34 V);
(3)根据欧姆定律与电阻定律有
=R=·l
x
则-l图像的斜率为k=
可得合金丝甲的电阻率为ρ=kS=
×7.0×10-8 Ω·m
≈9.9×10-7 Ω·m(9.6×10-7~1.0×10-6 Ω·m);
(4)另一根长度相同、材料相同的合金丝乙与合金丝甲并联后,电阻率不变,而横截面积变
为S′=S+S
乙
由图(b)中图线b可得
S′== m2
=27.2×10-8m2
解得S =S′-S=20.7×10-8 m2>S
乙
故合金丝甲的横截面积小于合金丝乙的横截面积.
例4 (1)×10 (2)C E 如图所示
(3)如图所示 0.93(0.90~0.96均可)实验十一 测量电源的电动势和内阻
例1 (1)B (2)①见解析图(a) ②R ③见解析图(c)
1
解析 (1)电压表示数的变化范围小,原因是外电阻的阻值远大于电源内阻,选项B正确.
(2)①根据数据描点并连成一条直线,如图(a)所示.
②由图像可知E=1.55 V,U=0时I=0.59 A,故r′=≈2.63 Ω,由于2 Ω7.5 Ω,因此电阻箱接入电路的电阻值选15.0 Ω.
(3)由闭合电路的欧姆定律可得
E=U+(R+r)
化简可得=·R++r
(5)由上面公式可得
=k=,
+r=b=+
由-R图像计算可得k≈0.034 V-1·Ω-1
延长图线,得到图线与纵轴的交点为0.85 V-1,则有0.85 V-1=++(V-1)代入可得E≈1.55 V,r≈1.0 Ω.
(6)如果电压表为理想电压表,则有
=++R
则此时E′=
因此误差为×100%=5%.
实验十二 用多用电表测量电学中的物理量
例1 (1)黑 (2)B (3)160 880 (4)1.47 mA 1.10 kΩ 2.94 V
解析 (1)当B端与“3”连接时,内部电源与外部电路形成闭合回路,电流从A端流出,故
A端与黑色表笔相连接.
(2)在使用多用电表之前,调整表头指针定位螺丝使电表指针指在表盘左端电流“0”位置,
选项A错误;使用欧姆挡时,先将两表笔短接,调整 R 使电表指针指在表盘右端电阻“0”
6
位置,选项B正确;使用电流挡时,电阻R 不在闭合电路中,调节无效,选项C错误.
6
(3)根据题给条件可知,当B端与“2”连接时,表头与R 、R 组成的串联电路并联,此时为
1 2
量程1 mA的电流挡,由并联电路两支路电流与电阻成反比知,==,
解得R+R=160 Ω.
1 2
当B端与“4”连接时,表头与R 、R 组成的串联电路并联后再与R 串联,此时为量程1 V
1 2 4
的电压挡,表头与R 、R 组成的串联电路并联后的总电阻为120 Ω,两端电压为0.12 V,则
1 2
R 两端电压为0.88 V,由串联电路中电压与电阻成正比知:R 电阻为880 Ω.
4 4
(4)若此时B端是与“1”连接的,多用电表作为直流电流表使用,量程为2.5 mA,读数为
1.47 mA.
若此时B端是与“3”连接的,多用电表作为欧姆表使用,读数为11×100 Ω=1.10 kΩ.
若此时B端是与“5”连接的,多用电表作为直流电压表使用,量程为5 V,读数为2.94 V.
例2 (1)大于 (2)×10 (3)向上 (4)400
解析 (1)根据题意可知R I;
m n
(2)当开关S拨向n时,全电路的总电阻较大,中值电阻较大,能够接入待测电阻的阻值也
更大,所以开关S拨向n时对应欧姆表的挡位倍率较大,即×10;
(3)从“×1”挡位换成“×10”挡位,即开关S从m拨向n,全电路电阻增大,干路电流减
小,①②短接时,为了使电流表满偏,则需要增大通过电流计 G所在支路的电流,所以需
要将R 的滑片向上调节;
0
(4)在“×10”挡位,电路图结构简化如图所示当①②短接时,全电路的总电阻为
R=R+
n
通过干路的电流为I=
电流计满偏,根据并联电路中电流之比等于电阻反比可知
=
当①②之间接入R=100 Ω的定值电阻时,全电路总电阻为R+R,通过干路的电流为I=
1 1 1
电流计偏转了量程的,则有=
解得R=2R=200 Ω
1
当①②之间接入R 时,全电路总电阻为R+R,
x x
通过干路的电流为I=
x
电流计偏转了量程的,
则有=
解得R=400 Ω.
x
例3 (1)欧姆调零 短管脚 (2)小 原因见解析
解析 (1)在测量电阻时,选择挡位后首先要进行欧姆调零;二极管发光时处于正向导通状
态,因为黑表笔所接的长管脚为二极管的正极,故短管脚为负极.
(2)从“×1”挡、“×10”挡、“×100”挡到“×1k”挡,多用电表的内阻越来越大,根
据闭合电路欧姆定律I=可知,通过二极管的电流越来越小,根据P=I2R可知二极管的亮度
越来越小.
例4 (1)①B ②A (2)①断开
②6 e、f 12.7 温度高时灯丝电阻率大,计算出的电阻是灯丝温度高时的电阻(或测量出
的电阻是常温下灯丝的电阻)
解析 (1)①因为电源的电动势大约为6 V,要使电压挡选择的量程安全以及准确,则选择
开关应选择10 V的量程,故B正确;②测得c、d间电压约为5.8 V,接近电源电动势,e、f
间电压为0,可知灯泡A断路,故A正确.
(2)①用欧姆表测量电阻时,开关应断开,使得待测电阻与电源不相连.②欧姆表的读数为
6×1 Ω=6 Ω,因为c、d间断路,知测量的是e、f间的电阻.根据R=得,小灯泡正常发光
时的电阻为R= Ω≈12.7 Ω.它不等于测量值,原因是温度高时灯丝电阻率大,计算出的电
阻是灯丝温度高时的电阻(或测量出的电阻是常温下灯丝的电阻).
例5 (1)如图所示 900 R
1(2)45 5 (3)0 35 000.0
解析 (1)由题知当两表笔间接入15 kΩ的电阻时,电流表示数为50 μA,由闭合电路欧姆定
律有=,代入数据解得R=900 Ω,所以滑动变阻器选择R.
1
(2)欧姆表的内阻R′=R +r+R +R=15 kΩ,当电流为25 μA时,有=,可得R′=45
g g 0 x
kΩ;当电流为75 μA时,有=,可得R″=5 kΩ.
x
(3)红、黑表笔短接,调节滑动变阻器,使欧姆表指针指向0 kΩ处.题图中电阻箱读数为
35 000.0 Ω.
专题强化十六 电学实验综合
例1 (1)0.200(0.198~0.202均可)
(2)如图所示
(3) 相等
解析 (1)由螺旋测微器的读数规则可知,该金属丝的直径应为 0 mm+20.0×0.01 mm=
0.200 mm;
(2)对提供的实验器材分析可知,滑动变阻器的总电阻比待测电阻的阻值小得多,因此滑动
变阻器应采用分压式接法,由于没有提供电压表,因此可以用内阻已知的电流表充当电压表,
即将A 作为电压表,由于A 的内阻已知,因此A 应采用外接法;
1 1 2
(3)由电路图可知,R=;由于A 的内阻已知,因此该实验不存在系统误差,因此测量值与
x 1
真实值相等.
例2 (1)实物连线如图(4)R (6)48.2
0
解析 开关S 掷于1端时,由欧姆定律可得通过R 的电流I=,将开关S 掷于2端,R 和R
2 x 2 0 x
两端电压为U ,R 两端电压为U=U -U ,由欧姆定律可得待测电阻阻值 R ==R =(-
2 x 2 1 x 0
1)R.5次测量所得的平均值为×(3.44+3.43+3.39+3.40+3.39)=3.41,代入得R=(3.41-
0 x
1)×20.0 Ω=48.2 Ω.
例3 (1)B C F (2)B C A E
(3)300 略小于 (4)串 19.7
解析 (1)半偏法测量表头内阻时,首先选择滑动变阻器(必须大于电路所需的最小电阻),根
据电路的电压为电动势,电路的最大电流为表头的满偏电流,则最小电阻为 Ω=3.0×104
Ω=30 kΩ或 Ω=7.5×103 Ω=7.5 kΩ,考虑到保护电阻1 kΩ,则可知调节滑动变阻器使表
头满偏时滑动变阻器的阻值分别接近29 kΩ或6.5 kΩ,电路图中R 是滑动变阻器,不能选D
2
和E,只能选F.表头满偏时滑动变阻器的阻值越大,实验的误差越小,所以电源选择电动势
为6 V的B,而且滑动变阻器F的阻值也满足调节所需,而R 是用来测量表头内阻的电阻箱,
1
只能选C.
(2)实验步骤:第一步闭合S ;第二步调节R 阻值,使电流计满偏;第三步闭合S ;第四步
2 2 1
调节R 阻值,使电流计半偏;第五步读出R 阻值即为待测表头的内阻,故后续的实验操作
1 1
步骤依次为BCAE.
(3)R 的示数为待测表头的内阻是300.0 Ω,闭合S 后,电路的总电阻减小,当表头半偏时干
1 1
路上的电流就大于表头的满偏电流,流过电阻箱的电流就大于表头的满偏电流,所以电阻箱
的阻值略小于表头的内阻.
(4)给表头串联一个电阻可以改装为电压表,改装后的电压表的内阻为R == Ω=2.0×104
V
Ω=20 kΩ,则串联电阻的大小为20 kΩ-300 Ω=19.7 kΩ.
例4 (1)R (2)见解析图 (3)2 520 (4)D
1
解析 (1)本实验为测电压表的内阻,实验中电压表示数变化不大,则接入电阻箱后电路的
总电阻变化不大,故需要滑动变阻器的最大阻值较小,故选R 可减小实验误差.
1
(2)滑动变阻器为分压式接法,实物图连线如图所示.(3)电压表和电阻箱串联,两端电压分别为2.00 V和0.50 V,
则R =4R=2 520 Ω.
V
(4)表头的满偏电流I== A≈1 mA,故选项D正确.
g
例5 (1)C F (2)③不再滑动
(3)56 (4)等于
解析 (1)由于电动势为4.0 V,15 V量程的电压表量程太大,因此选用量程为3 V的电压表;
最大阻值为5 Ω的滑动变阻器会使得被测电阻两端的电压超过3 V的电压表量程,因此不能
选用,只能选用最大阻值为50 Ω的滑动变阻器.
(2)根据实验原理,滑动变阻器的阻值R是不能改变的,否则就不能解出R 的值.
x
(3)根据闭合电路的欧姆定律,单刀双掷开关掷于“1”的位置时=,即=
单刀双掷开关掷于“2”的位置时=,即=,联立解得R=56 Ω
x
(4)蓄电池的内电阻r与滑动变阻器电阻可当作一个整体,则r的存在不影响R 的值.
x
例6 (1)见解析图
(2)①20 ②左 ③相等 ④2 550
(3)调节R 上的分压,尽可能使微安表接近满量程
1
解析 (1)实物连线如图所示:
(2)①滑动变阻器R 采用分压式接法,为了方便调节要选择阻值较小的滑动变阻器,故R 的
1 1
阻值为20 Ω;
②为了保护微安表,开始时将R 的滑片C滑到滑动变阻器的左端对应的位置;
1
③将电阻箱R 的阻值置于2 500.0 Ω,接通S ;将R 的滑片置于适当位置,再反复调节R 的
z 1 1 2
滑片D的位置;最终使得接通S 前后,微安表的示数保持不变,这说明 S 接通后在BD中
2 2
无电流流过,可知B与D所在位置的电势相等;④设滑片D两侧电阻分别为R 和R ,由B与D所在位置的电势相等可知,=;同理,当
21 22
R 和微安表对调时,仍有=;联立两式解得,R == Ω=2 550 Ω
z μA
(3)为了提高测量精度,应调节R 上的分压,尽可能使微安表接近满量程.
1
例7 (2)b (4) -R-R
0 A
(5)见解析图
解析 (2)开关闭合前,为了保护电路中的元件,应使电阻丝接入电路的阻值最大,根据电
阻定律R=ρ可知电阻丝接入越长,接入电阻越大,金属夹应夹在电阻丝的b端.
(4)设圆心角为θ时,电阻丝接入电路中的电阻为θr,根据闭合电路欧姆定律可知E=I(R +
0 A
R+θr)+Ir,整理得=θ+
0 0
结合-θ图像的斜率和纵截距有
=k,=d
解得E=,r=-R-R
0 A
(5)实验器材中有定值电阻R 和单刀双掷开关,考虑使用等效法测量电阻丝电阻,如图
0
原理的简单说明:
①将开关置于R 位置,读出电流表示数I;
0 0
②将开关置于电阻丝处,调节电阻丝对应的圆心角,直到电流表示数为I ,读出此时的圆心
0
角θ ;
③此时θr=R,即可求得r 的数值.
0 0 0
第十一章 磁场
第 1 讲 磁场及其对电流的作用
例1 C [磁感应强度B=是用比值定义法定义B的,但磁感应强度是磁场的固有性质,与
通电导线所受磁场力F及Il的乘积等外界因素无关,A、B错误;B=是在电流与磁场垂直
的情况下得出的,如果不垂直,设电流方向与磁场方向夹角为θ,则根据F=IlBsin θ得B
=,即B不一定等于, 如果B∥I,虽然B≠0,但F=0,故C正确,D错误.]
例2 C [根据安培定则可判断出电流的磁场方向,再根据小磁针静止时N极的指向为磁场
的方向可知C正确.]例3 C [在两导线中均通有方向垂直于纸面向里的电流I时,根据安培定则及矢量叠加原
理可知它们在a点处产生的合磁感应强度方向平行于PQ向右,设大小为B ,如图所示,由
1
于a点处的合磁感应强度为零,由此可知外加的磁场方向平行于PQ向左,且B =B ,设导
0 1
线P、Q在a点处产生的磁感应强度分别为B 、B ,则B =B ,根据几何关系有2B cos 30°
P Q P Q P
=B,解得B =B =B,故A、B错误;
1 P Q 0
只把导线Q中电流的大小变为2I,则导线Q在a点产生的磁感应强度方向不变,大小变为
B ′=B,由几何知识结合矢量叠加原理,求得a点处磁感应强度大小为B=B,故C正确;
Q 0 a 0
当导线P中的电流反向,其他条件不变,则导线P在a处产生的磁感应强度大小不变,但方
向反向,可求得两导线在a处的合磁场大小为B=B,方向竖直向上,如图所示,因外加的
2 0
磁场方向与PQ平行,且由Q指向P,最后由矢量的合成法则,可得a点处磁感应强度B的
大小为B==B,故D错误.
0
]
例4 A [由几何关系可知,C、D两点间的距离L=2Rsin 60°=R,由等效思想可知,导体
线圈受到的总安培力的大小F =BIL=BIR,故选A.]
安
例5 C [根据安培定则,可判断出导线a左侧部分所在处磁场方向斜向右上方,右侧部分
的磁场方向斜向右下方,根据左手定则可判断出左半部分所受安培力垂直纸面向外,右半部
分所受安培力垂直纸面向里,故C正确,A、B、D错误.]
例6 C [根据安培定则,Q产生的磁场的方向垂直于纸面向外,P产生的磁场方向水平向
右,将Q等效于S极在里、N极在外的小磁针,P等效于左侧S极、右侧N极的小磁针,根
据同名磁极相互排斥、异名磁极相互吸引的特点,P将逆时针转动,Q顺时针转动;转动后
P、Q两环相互靠近处的电流的方向相同,所以两个线圈相互吸引,细线张力减小,故C正
确,A、B、D错误.]
例7 D [当导线静止在题图(a)右侧位置时,对导线受力分析如图所示,可知要让安培力为
图示方向,则导线中电流方向应由M指向N,A错误;由于与OO′距离相等位置的磁感应
强度大小相等且不随时间变化,有sin θ=,F =mgcos θ,则可知sin θ与电流I成正比,
T
当I增大时θ增大,则cos θ减小,静止后,悬线对导线的拉力F 减小,由牛顿第三定律知,
T导线对悬线的拉力减小,B、C错误,D正确.
]
例8 (1)1.2 T (2)1.2 m/s2,方向沿导轨向上
解析 (1)由安培力公式和平衡条件可得mgsin θ=BILcos θ
由闭合电路欧姆定律得I=
解得B=1.2 T
(2)由牛顿第二定律和闭合电路欧姆定律有
BI′Lcos θ-mgsin θ=ma,
I′=
解得a=1.2 m/s2,方向沿导轨向上.
第 2 讲 磁场对运动电荷(带电体)的作用
例1 B [根据题意,由安培定则可知,b、d两通电直导线在O点产生的磁场相抵消,a、c
两通电直导线在O点产生的磁场方向均向左,所以四根通电直导线在O点产生的合磁场方
向向左,由左手定则可判断带正电粒子所受洛伦兹力的方向向下,B正确.]
例2 AD [根据安培定则知两导线连线的垂直平分线上,O点左侧的磁场方向竖直向下(俯
视),O点右侧的磁场方向竖直向上,根据左手定则可得,滑块在 a、b两点受到的磁场力方
向相同,故A正确,B错误;水平面光滑,滑块带正电荷,洛伦兹力垂直平面向里,水平面
对滑块的支持力与洛伦兹力和重力的合力平衡,一定做直线运动,故C错误;若水平面粗
糙,则滑块从b点出发后,由于摩擦力做负功,重力、支持力及洛伦兹力不做功,故一定做
减速运动,故D正确.]
例3 ACD [设初速度为v ,则F =Bqv ,若满足mg=F=μF ,即mg=μBqv ,物块向下
0 N 0 f N 0
做匀速运动,选项A正确;若mg>μBqv ,则物块开始有向下的加速度,由 a=可知,随着
0
速度增大,加速度减小,即物块先做加速度减小的加速运动,最后达到匀速状态,选项D
正确,B错误;若mg<μBqv,则物块开始有向上的加速度,物块做减速运动,由a=可知,
0
随着速度减小,加速度减小,即物块先做加速度减小的减速运动,最后达到匀速状态,选项
C正确.]
例4 (1)正电荷 (2)
(3)解析 (1)根据题意,小球下滑过程中受到的洛伦兹力方向垂直斜面向上,根据左手定则可
知小球带正电荷.
(2)当小球刚下滑至分界线时,对斜面的压力恰好为0,然后小球继续向下运动,在左侧区域
当压力再次为零时,速度达到最大值,则有qv =mgcos θ,解得v =.
m m
(3)当小球刚下滑至分界线时,对斜面的压力恰好为0,设此时速度为v ,则有qvB=mgcos
θ,解得v=,小球下滑的加速度满足mgsin θ=ma,解得a=gsin θ,根据2aL=v 2-v2,
m
可得L=.
例5 C [碰撞后,由洛伦兹力提供向心力,有qvB=m,可得r=,又p=mv ,碰撞过程
0 0
中动量守恒,p不变,电荷量不变,则半径不变,故C正确,A、B、D错误.]
例6 D [带电粒子在匀强磁场中做匀速圆周运动,洛伦兹力提供向心力,有 qvB=m,动
能为E =mv2,联立可得E =,由题意知α粒子和β粒子所带电荷量之比为2∶1,故α粒子
k k
和β粒子的动能之比为=,故D正确.]
例7 B [设带电粒子进入第二象限的速度为v,在第二象限和第一象限中运动的轨迹如图
所示,对应的轨迹半径分别为R 和R ,由洛伦兹力提供向心力,有qvB=m、T=,可得R
1 2 1
=、R =、T =、T =,带电粒子在第二象限中运动的时间为t =,在第一象限中运动的时
2 1 2 1
间为t =T ,又由几何关系有cos θ==,可得t =,则粒子在磁场中运动的时间为 t=t +
2 2 2 1
t,联立以上各式解得t=,选项B正确,A、C、D错误.
2
]
专题强化十七 带电粒子在有界匀强磁场中的运动
例1 A [电子1、2在磁场中都做匀速圆周运动,根据题意画出两电子的运动轨迹,如图
所示,电子1垂直边界射入磁场,从b点离开,则运动了半个圆周,ab即为直径,c点为圆
心;电子2以相同速率垂直磁场方向射入磁场,经t 时间从a、b连线的中点c离开磁场,
2
根据半径r=可知,电子1和2的半径相等,根据几何关系可知,△aOc为等边三角形,则电
子2转过的圆心角为60°,所以电子1运动的时间t ==,电子2运动的时间t ==,所以=
1 2
3,故A正确,B、C、D错误.]
例2 BD [由题意,作出两核在磁场中的运动轨迹示意图如图所示,两核在磁场中做匀速
圆周运动,由洛伦兹力提供向心力,qvB=m,T==,两核在磁场中运动时间t=T=,H和
H的比荷之比为2∶1,圆心角之比为1∶2,代入可得氘核H在该磁场中运动的时间为t′=
4t ,故A错误,B正确;设磁场圆半径为 r,氕核H和氘核H的轨迹圆圆心分别为O 、
0 1
O ,分别从A点、C点射出磁场,氘核H在磁场中运动的轨迹半径为R′,则对△PAB,由
2
几何关系可得R=r,对△OOC,由几何关系可得R′=r,可得出R′=R,故C错误,D正
2
确.
]
例3 AB [粒子运动轨迹如图所示,r+rsin 30°=d,解得粒子运动轨迹半径为r=d,故A
正确;由qvB=m,r=d,联立解得粒子进入磁场时的速度为v==,故B正确;T==,如
图由几何关系知t=T,解得粒子在磁场中运动的时间为t=,故C错误;粒子运动轨迹与y
轴交点的纵坐标为y=-2rcos 30°=-d,故D错误.
]
例4 ABC [粒子在磁场中做匀速圆周运动,洛伦兹力提供向心力,有 qvB=,解得粒子
0
在磁场中运动的半径为r==L,故A正确;如图甲所示,当粒子恰好从A点射出时,根据
几何关系可得粒子与OC成60°角入射,所以与OC成45°角入射的粒子将从AC边射出,故
B正确;
如图乙所示,根据几何关系可知沿OC方向入射的粒子将恰好从D点射出,结合上面B项分
析可知AD为AC边界上有粒子射出的区域,其长度为L,故C正确;所有粒子在磁场中运动的周期均相同,设为T,设粒子在磁场运动过程中转过的圆心角为α,则粒子运动时间为t
=T,由于所有粒子的运动轨迹为半径相同的圆,从OA射出的粒子,其轨迹所截AO的长
度不同,对应转过的圆心角不同,所以所有从OA边界射出的粒子在磁场中运动的时间不等,
故D错误.
]
例5 BD [当磁场方向垂直纸面向里时,离子恰好与OP相切的轨迹如图甲所示,切点为
M,设轨迹半径为r,由几何关系可知sin 30°=,可得r=s,由r=可得B=;当磁场方向
1 1 1 1
垂直纸面向外时,其临界轨迹即圆弧与OP相切于N点,如图乙所示,设轨迹半径为r ,由
2
几何关系s=+r ,得r =,又r =,所以B =,综合上述分析可知,选项B、D正确,A、
2 2 2 2
C错误.]
例6 CD [若粒子带正电,粒子与挡板MN碰撞后恰好从Q点射出,粒子运动轨迹如图甲
所示,
设轨迹半径为r ,由几何知识得L2+(r -0.5L)2=r2,解得r =L,根据牛顿第二定律得qvB
2 2 2 2 2
=m,解得v =,根据动量定理得I=2mv =,故A错误,C正确;若粒子带负电,则粒子
2 2
的运动轨迹如图乙所示,
粒子做圆周运动的半径为r =L,由牛顿第二定律得qvB=m,解得v =,此时半径最小,
1 1 1
速度也最小,故B错误;若粒子带负电,粒子在磁场中的运动轨迹对应的圆心角为时,粒
子在磁场中的运动时间为t=T=,故D正确.]
例7 BC [若离子通过下部分磁场直接到达P点,如图,根据几何关系则有R=L,由qvB=m,可得v==kBL,根据对称性可知出射速度与SP成30°角斜向上,故出射方向与入射
方向的夹角为θ=60°.
当离子在两个磁场均运动一次时,如图,因为两个磁场的磁感应强度大小均为B,则根据对
称性有R=L,
根据洛伦兹力提供向心力,有qvB=m,可得v==kBL,此时出射方向与入射方向相同,即
出射方向与入射方向的夹角为θ=0°.通过以上分析可知当离子从下部分磁场射出时,需满足
v==kBL(n=1,2,3,…),此时出射方向与入射方向的夹角为θ=60°;当离子从上部分磁场
射出时,需满足v==kBL(n=1,2,3,…),此时出射方向与入射方向的夹角为θ=0°,故B、
C正确,A、D错误.]
专题强化十八 动态圆
例1 C [粒子在磁场中做匀速圆周运动,有qvB=m,解得r=2R,如图所示,当粒子在
0
磁场中的运动轨迹对应的圆心角最大时,粒子在磁场中运动的时间最长,由于 sin α=,要
使圆心角α最大,FE最长,经分析可知,当粒子从y轴上的D′点射入、从x轴上的E′点
射出磁场时,粒子在磁场中运动的时间最长,有sin α =,解得α =,从D′点射入磁场的
m m
粒子在磁场中运动的时间最长,且t =·,解得t =,故选C.
m m
]例2 (1)或 (2)
解析 (1)由题意可知,沿x轴正方向出射的离子,经半圆到达N点,
由此可得r=a,可知通过M点的离子有两个出射方向,如图甲,一个轨迹转过的圆心角为
60°,即t =T,另一个轨迹转过的圆心角为300°,即t =T,离子做匀速圆周运动,周期T
1 2
=,即T=,解得t=,t=
1 2
(2)如图乙所示,由动态圆分析结果可知,能打到收集板上的离子分布在速度方向与 x轴正
方向成60°角的范围内,因为放射源均匀打出离子,因此打到收集板上的离子数占辐射总数
的比例为=.
例3 C [磁感应强度取最小值时对应的临界状态如图所示,设电子在磁场中做圆周运动的
半径为r,由几何关系得a2+r2=(3a-r)2,根据牛顿第二定律和圆周运动知识得evB=m,
联立解得B=,故选C.
]
例4 AD [带电粒子以垂直于cd边的某一速度射入正方形内,经过时间t 刚好从c点射出
0
磁场,则知带电粒子的运动周期T=2t.该粒子从O点以与Od成30°角的方向射入磁场,随
0
着粒子速度逐渐增大,轨迹由①→②→③→④依次渐变,由图可知粒子在四个边射出时,射
出范围分别为OG、FE、DC、BA之间,不可能从四个顶点射出,故A正确.由上述分析知
粒子运动周期为2t ,由图分析可知,从ab边射出的粒子所用时间不可能为t ,从bc边射出
0 0
的粒子所用时间不超过T=,所有从cd边射出的粒子圆心角都是300°,所用时间为=,故
B、C错误,D正确.]
例5 (1) (2) 垂直于纸面向里 πr2 (3) (π-1)r2 (π-1)r2
2 3 4
解析 (1)粒子垂直y轴进入圆形磁场,在坐标原点O汇聚,满足磁聚焦的条件,即粒子在
磁场中运动的半径等于圆形磁场的半径r ,粒子在磁场中运动,洛伦兹力提供向心力,qvB
1 1
=m,解得B=
1
(2)粒子从O点进入下方虚线区域,若要从聚焦的O点飞入然后沿x轴正方向飞出,为磁发
散的过程,即粒子在下方圆形磁场运动的轨迹半径等于磁场半径,粒子轨迹最大的边界如图
甲中所示,图中圆形磁场即为最小的匀强磁场区域
磁场半径为r,根据qvB=m,
2 2
可知磁感应强度为B =,根据左手定则可知磁场的方向为垂直纸面向里,圆形磁场的面积
2
为S=πr2
2 2
(3)画出磁场区域面积最小时的情形,如图乙所示.
在Ⅰ、Ⅱ区域的磁场中,由几何关系可知带电粒子运动的轨迹半径R =r ,由洛伦兹力提供
3 3
向心力有qvB=,解得B=,Ⅱ中磁场区域的面积S=2×=r2.
3 3 1 3
在Ⅲ、Ⅳ区域的磁场中,由几何关系可知带电粒子运动的轨迹半径R =r ,由洛伦兹力提供
4 4
向心力有qvB=,解得B=,Ⅳ中磁场区域的面积S=2×=r2.
4 4 4 4专题强化十九 洛伦兹力与现代科技
例1 C [离子在电场中加速有qU=mv2,解得v=;离子在磁场中偏转有qvB=m,联立解
得r=,变形得m=,同位素的电荷量一样,其质量之比为===1.082,故选项C正确,
A、B、D错误.]
例2 A [质子出回旋加速器的速度最大,此时的半径为R,则v==2πRf,所以最大速度
不超过2πRf,故A正确;根据Bqv=m,知v=,则最大动能E =mv2=,与加速电压无关,
km
故B错误;质子在加速电场中做匀加速运动,在磁场中做匀速圆周运动,根据v=知,质子
第二次和第一次经过D形盒狭缝的速度之比为∶1,根据r=,则半径之比为∶1,故C错误;
带电粒子在磁场中运动的周期与加速电场的周期相等,根据 T=知,换用α粒子,粒子的比
荷变化,周期变化,改变交流电的频率才能加速α粒子,故D错误.]
例3 (1) (2) (3)
解析 (1)质子在D形盒内做圆周运动,轨道半径达到D形盒半径R时被导出,此时具有最
大动能.设此时的速度大小为v ,由牛顿第二定律得qv B=m,交变电压的周期T与质子
m m
在磁场中运动的周期相同,
有T=
联立解得B=
(2)质子的最大动能为E =mv 2=,质子每加速一次获得的能量为E=qU
km m 0 0
加速次数为n=,
联立解得n=
(3)质子通过狭缝的时间忽略不计,则质子在回旋加速器中运动的时间为
t=n=
例4 C [若带电微粒带正电,则受到的洛伦兹力向上,静电力向下,若带电微粒带负电,
则受到的洛伦兹力向下,静电力向上,微粒沿PQ运动,洛伦兹力等于静电力,因此微粒可
以带正电也可以带负电,故A错误;对微粒受力分析有Eq=qvB,解得B=,故B错误;若
带电微粒带负电,从Q孔沿QP连线射入,受到的洛伦兹力和静电力均向上,若带电微粒带
正电,从Q孔沿QP连线射入,受到的洛伦兹力和静电力均向下,不可能做直线运动,故不
能从P孔射出,故C正确;若将该带电微粒以2v的速度从P孔沿PQ连线射入后,洛伦兹
力大于静电力,微粒做曲线运动,由于洛伦兹力是变力,不可能做类平抛运动,故 D错
误.]
例5 B [等离子体垂直于磁场喷入板间时,根据左手定则可得金属板Q带正电,金属板P
带负电,则电流方向由金属棒a端流向b端.由于金属棒恰好静止,则此时等离子体穿过金
属板P、Q时产生的电动势U满足q=qB v,由欧姆定律I=和安培力公式F=BIL可得F =
1 安BL=,再根据金属棒ab垂直导轨放置,恰好静止,可得F =mgsin θ,则v=,金属棒ab
2 安
受到的安培力方向沿导轨向上,由左手定则可判定导轨处磁场的方向垂直导轨平面向下.故
选B.]
例6 D [污水中正、负离子从左向右移动,受到洛伦兹力,根据左手定则,正离子向后表
面偏转,负离子向前表面偏转,所以a侧电势比c侧电势高,故A错误;最终正、负离子会
在静电力和洛伦兹力作用下处于平衡状态,有qE=qvB,即=vB,则污水流量Q==·=,
可知Q与U、D成正比,与L无关,显示仪器的示数与离子浓度无关,匀强磁场的磁感应强
度B=,故D正确,B、C错误.]
例7 D [由题意可知,圆盘转动的周期是脉冲信号周期的 2倍,可得n=,故A错误;改
变题图乙中的电源正负极,ab间电势差的正负号相反,故B错误;由公式qvB=q可知U=
Bvh,所以霍尔元件所在处的磁场越强,脉冲信号的最大值就越大,与转速无关,结合公式
I=nqSv=nqvLh,可得U=,所以脉冲信号的最大值与霍尔元件的左右宽度L有关,故C错
误;圆盘转到题图所示位置时,由左手定则可知,定向移动的电荷向下偏转,若 a点电势高,
则定向移动的电荷为负电荷,故D正确.]
专题强化二十 带电粒子在组合场中的运动
例1 (1) (2)B≥
1
(3)4na(n=1,2,3,…)
解析 (1)粒子在OF上方的运动轨迹如图所示,
设粒子做圆周运动的半径为R,由几何关系可知R2-(R-a)2=(3a)2,则R=5a,由牛顿第二
定律可知qvB=m,解得v=.
0
(2)当粒子恰好不从AC边界飞出时,其运动轨迹如图所示,设粒子在OF下方做圆周运动的
半径为r,
1
由几何关系得r+rcos θ=3a,
1 1
由(1)可知cos θ==,所以r=,根据qvB=,
1 1
联立解得B=,故当B≥时,粒子不会从AC边界飞出.
1 1
(3)当B=3B 时,粒子的运动轨迹如图所示,粒子在OF下方的运动半径为r=a,设粒子的
0
速度方向再次与射入磁场时的速度方向一致时,粒子的位置为P 点,则P点与P 点的连
1 1
线一定与OF平行,根据几何关系知 PP=4a,所以若粒子最终垂直DE边界飞出,边界DE
1
与AC间的距离为L=nPP=4na(n=1,2,3,…).
1
例2 (1)h (2)
(3)(-1)h
解析 (1)H在电场中做类平抛运动,在磁场中做匀速圆周运动,运动轨迹如图所示.设 H
在电场中的加速度大小为a ,初速度大小为v ,它在电场中的运动时间为t ,第一次进入磁
1 1 1
场的位置到原点O的距离为s,由运动学公式有s=vt①
1 1 11
h=at2②
11
由题给条件,H进入磁场时速度的方向与x轴正方向夹角θ =60°.H进入磁场时速度沿y轴
1
方向的分量的大小为at=vtan θ③
11 1 1
联立以上各式得s=h④
1
(2)H在电场中运动时,由牛顿第二定律有qE=ma ⑤
1
设H进入磁场时速度的大小为v′,由速度合成法则有
1
v′=⑥
1
设磁感应强度大小为B,H在磁场中运动的圆轨道半径为R,由洛伦兹力公式和牛顿第二定
1
律有
qv′B=⑦
1
由几何关系得s=2Rsin θ⑧
1 1 1
联立以上各式得B= ⑨
(3)设H在电场中沿x轴正方向射出的速度大小为v ,在电场中的加速度大小为a ,由题给
2 2
条件得
(2m)v2=mv2⑩
2 1由牛顿第二定律有qE=2ma ⑪
2
设H第一次射入磁场时的速度大小为v′,速度的方向与x轴正方向夹角为θ,入射点到原
2 2
点的距离为s,在电场中运动的时间为t.由运动学公式有s=vt ⑫
2 2 2 22
h=at2⑬
22
v′=⑭
2
sin θ=⑮
2
联立以上各式得s=s,θ=θ,
2 1 2 1
v′=v′⑯
2 1
设H在磁场中做圆周运动的半径为R ,由⑦⑯式及粒子在匀强磁场中做圆周运动的半径公
2
式得
R==R ⑰
2 1
所以出射点在原点左侧.设H进入磁场的入射点到第一次离开磁场的出射点的距离为s′,
2
由几何关系有s′=2Rsin θ ⑱
2 2 2
联立④⑧⑯⑰⑱式得,H第一次离开磁场时的位置到原点O的距离为
s′-s=(-1)h.
2 2
例3 (1) (2)
解析 (1)粒子在磁场中运动时(如图所示),设轨迹半径为R,根据洛伦兹力提供向心力可得
qvB=
由几何关系有L=2Rcos 30°
联立解得B=.
(2)粒子进入电场时,速度方向与边界OP的夹角为60°,由几何关系可知,速度方向和电场
方向垂直.粒子在电场中的位移x=PQ=Lsin 30°
又xsin 30°=vt
xcos 30°=at2
Eq=ma
联立解得E=.
例4 (1) 8eU (2)
解析 (1)电子在电场中加速有2eU=mv2,在Ⅰ区磁场中,由几何关系可得r=Rtan 22.5°=
0.4R,根据洛伦兹力提供向心力有Bev=m
1
联立解得B=
1电子在Ⅰ区磁场中的运动周期为T=
由几何关系可得,电子在Ⅰ区磁场中运动的圆心角为φ=π,电子在Ⅰ区磁场中的运动时间
为t=T
联立解得t=
电子从P到Q在电场中共加速8次,故在Q点出射时的动能为E=8eU
k
(2)设电子在Ⅰ区磁场中做匀速圆周运动的最大半径为r ,此时圆周的轨迹与Ⅰ区磁场边界
m
相切,由几何关系可得2=R2+r 2
m
解得r =R
m
根据洛伦兹力提供向心力有
Bev =m
1 m
2eU=mv 2-keU
m
联立解得k=.
例5 (1) (2)0.8l
(3)(1+1.36n)l,n=0、1、2、3、…
解析 (1)粒子从A点发射后运动到C的过程,洛伦兹力提供向心力
qvB=
1
由几何知识可得R2=(2l-R)2+l2,解得R=l,B=
1 1 1 1
(2)粒子经过C点时的速度方向与竖直方向的夹角为θ,则cos θ==0.8
粒子进入磁场B 之后,圆周运动半径为R==R=l,
2 2 1
又因为dtan θ=Rcos θ,
2
解得d=0.8l
由R=l得,粒子在B 磁场中不会从左边界飞出.
2 2
(3)粒子到达C点后第一次在电场中向左运动距离Δx=vsin θ·=0.64l
粒子在B 磁场中运动到最左边时,距C点距离
1
x =Δx+R-l=0.89lh的区域后
做匀速圆周运动,再从C点离开y>h区域,最后从x轴上的N点离开第一象限.
由O→A匀速运动的位移为s==h
1
其运动时间t==0.1 s
1
由qvB=m,T=得T=
油滴从A→C做圆周运动的时间为t=T==0.628 s
2
由对称性知,从C→N的时间t=t
3 1故油滴在第一象限运动的总时间t=t+t+t=2×0.1 s+0.628 s
1 2 3
=0.828 s.
例3 (1) (2)2B
0
(3)(n=0,1,2,…)
解析 (1)粒子从b板到a板的过程中,静电力做正功,根据动能定理有qU=mv2-0
解得粒子第一次到达O点时的速率
v=
(2)粒子进入a板上方后做匀速圆周运动,洛伦兹力提供向心力,
由qvB=m得r=,
则得粒子做匀速圆周运动的半径
r=,r=
1 2
使其在整个装置中做周期性的往返运动,运动轨迹如图所示,由图易知 r =2r ,已知B =
1 2 1
B,则得B=2B
0 2 0
(3)在0~t 时间内,粒子做匀速圆周运动的周期T=
1 1
在t~(t+t)时间内,粒子做匀速圆周运动的周期T=
1 1 2 2
由轨迹图可知t=T=
1 1
t=T=
2 2
粒子在金属板a和b间往返时间为t,
有d=×,且满足t=t+n(t+t)(n=0,1,2,…)
2 1 2
联立可得金属板a和b间的距离d=(n=0,1,2,…).
例4 (1) (2) (3)vt
00
解析 (1)0~t 时间内粒子P在匀强磁场中做匀速圆周运动,当粒于所在位置的纵、横坐标
0
相等时,粒子在磁场中恰好经过圆周,所以粒子P第一次离x轴的最远距离等于轨道半径
R,即R=①
又qvB=m②
0 0
又有=
联立解得=③
(2)设粒子P在磁场中运动的周期为T,则T=④
联立①④式解得T=4t⑤
0即粒子P做圆周运动后磁场变为电场,粒子以速度 v 垂直电场方向进入电场后做类平抛运
0
动,设t~2t 时间内水平位移和竖直位移分别为x、y,则x=vt==⑥
0 0 1 1 1 00
y=at2⑦
1 0
其中加速度a=⑧
联立①③⑦⑧式解得y==R⑨
1
因此t=2t 时刻粒子P的位置坐标为(vt,0),如图中的b点所示.
0 00
(3)分析知,粒子P在2t ~3t 时间内,静电力产生的加速度方向沿y轴正方向,由对称关系
0 0
知,在3t 时刻速度方向为x轴正方向,位移x =x =vt ;在3t ~5t 时间内粒子P沿逆时针
0 2 1 00 0 0
方向做匀速圆周运动,往复运动轨迹如(2)中图所示,由图可知,带电粒子在运动中距原点
O的最远距离L,即O、d间的距离,则L=2R+2x,解得L=vt.
1 00
专题强化二十二 带电粒子在立体空间中的运动
例1 D [将质子的初速度分解为垂直于磁场方向的速度v =vsin θ,沿磁场方向的速度v
1 2
=vcos θ,质子沿垂直磁场方向做匀速圆周运动,沿磁场方向做匀速直线运动,则质子运动
的轨迹为螺旋线,螺旋线的中轴线方向平行磁场方向,选项 A错误;质子做螺旋线运动的
半径为r==,选项B错误;质子做螺旋线运动的周期为T==,选项C错误;一个周期内,
质子沿着螺旋线轴线方向运动的距离(即螺距)为x=vT=,选项D正确.]
2
例2 (1)
(2)2mv2+(v+)
0 0
解析 (1)由题意可知α粒子的质量为m =4m、电荷量为q =2q,将α粒子的初速度分解成
α α
沿x轴方向的分速度v 与垂直x轴方向的分速度v,则有v=vcos 60°=v ,v=vsin 60°=
x y x 0 0 y 0
v
0
由于v 与磁场方向平行,不受洛伦兹力影响,电场方向沿着x轴方向,只影响v,不影响
x x
v,故α粒子在电、磁场中的运动可分解为:垂直于x轴的平面内做匀速圆周运动,沿x轴
y
方向做匀加速直线运动.对于垂直于x轴平面内的匀速圆周运动,有q vB=m ,解得圆周
α y α
运动半径r===,故α粒子离x轴的最远距离是直径的长度,即为;
(2)α粒子从O点射出后,第3次与x轴相交时,由于在垂直于x轴的平面内做匀速圆周运动,
可知此过程经历的时间t=3T=3×=,沿x轴方向的匀加速直线运动所通过的位移x=vt+
x
at2,又加速度a==,解得x=(v+)
0α粒子从O点射出后到第3次与x轴相交的过程,由动能定理有q Ex=E-m v2
α k α 0
联立解得α粒子从O点射出后,第3次与x轴相交时的动能E=2mv2+(v+).
k 0 0
例3 (1) (2)
(3)(d,d,0) (4)(2+2)
解析 (1)如图所示
将离子甲在A点的出射速度v 分解到沿y轴方向和z轴方向,离子受到的静电力沿y轴负方
0
向,可知离子沿z轴方向做匀速直线运动,沿y轴方向做匀减速直线运动,从A到O的过程,
有
L=vcos β·t,vsin β=at,a=
0 0
联立解得E=;
(2)如图所示
离子从坐标原点O沿z轴正方向进入磁场Ⅰ中,由洛伦兹力提供向心力可得qvB=
1
离子经过磁场Ⅰ偏转后从y轴进入磁场Ⅱ中,由洛伦兹力提供向心力可得qv
1
·B=,可得r
Ⅱ
=r
Ⅰ
为了使离子在磁场中运动,
需满足r ≤d,r ≤3d
Ⅰ Ⅱ
则可得v≤,故要使离子甲进入磁场后始终在磁场中运动,进入磁场时的最大速度为;
1
(3)离子甲以v=的速度从O点沿z轴正方向第一次穿过xOy面进入磁场Ⅰ,离子在磁场Ⅰ中
的轨迹半径为r==,离子在磁场Ⅱ中的轨迹半径为r=
1 2
离子从O点第一次穿过到第四次穿过xOy平面的运动情景,如图所示离子第四次穿过xOy平面的x坐标为x=2rsin 45°=d
4 2
离子第四次穿过xOy平面的y坐标为y=2r=d
4 1
故离子第四次穿过xOy平面的位置坐标为(d,d,0);
(4)设离子乙的速度为v′,根据离子甲、乙动能相同,
可得mv2=×4mv′2
可得v′==
离子乙在磁场Ⅰ中的轨迹半径为
r′==d=2r
1 1
离子乙在磁场Ⅱ中的轨迹半径为
r′==d=2r
2 2
根据几何关系可知离子甲、乙运动轨迹第一个交点如图所示,
从O点进入磁场到轨迹第一个交点的过程,有
t =T+T=+
甲 1 2
=(2+2)
t =T′+T′=×+×=(4+4)
乙 1 2
可得离子甲、乙到达它们运动轨迹第一个交点的时间差为Δt=t -t =(2+2).
乙 甲第十二章 电磁感应
第 1 讲 电磁感应现象 楞次定律
实验:探究影响感应电流方向的因素
例1 B [题图甲中条形磁体插入螺线管中静止不动时,螺线管内磁通量保持不变,则无感
应电流,A错误;题图乙中无论滑动变阻器滑片怎么移动,线圈b内的电流都会变化,则线
圈b产生的磁场都会变化,导致线圈a中的磁通量变化,线圈a中会产生感应电流,B正确;
题图丙中闭合开关和断开开关都会使螺线管B的磁通量发生变化,螺线管B中会产生感应
电流,电流计指针都会发生偏转,C错误;当导体棒的运动方向与磁场平行时,导体棒不切
割磁感线,则无感应电流,D错误.]
例2 A [设此时回路面积为S,据题意,穿过回路的磁通量Φ=BScos θ.ab向右运动,则S
增大,θ减小,则cos θ增大,因此Φ增大,回路里一定能产生感应电流,A正确;B减小,
θ减小,cos θ增大,Φ可能不变,回路里不一定能产生感应电流,B错误;ab向左运动,
则S减小,B增大,Φ可能不变,回路里不一定能产生感应电流,C错误;ab向右运动,则
S增大,B增大,θ增大,cos θ减小,Φ可能不变,回路里不一定能产生感应电流,D错
误.]
例3 (1)见解析图 (2)①右 ②左 (3)穿过B线圈的磁通量发生变化
解析 (1)将电源、开关、A线圈、滑动变阻器串联成一个回路,再将电流计与B线圈串联成
另一个回路,电路图如图所示(说明:滑动变阻器接下端接左线柱也正确,相应(2)中①填
“左”)
(2)①闭合开关,穿过B线圈的磁通量增大,灵敏电流计的指针向右偏了一下,滑片向右移
动则接入电路的电阻减小,电流增大,磁通量增大,指针向右偏转;②拔出铁芯,磁通量减
小,指针向左偏转.
(3)产生感应电流的本质是穿过B线圈的磁通量发生变化.
例4 B [若同时增大B 减小B,则穿过环向里的磁通量增大,根据楞次定律,感应电流产
1 2
生的磁场方向向外,由安培定则,环中产生的感应电流是逆时针方向,故选项 A错误;同理可推出,选项B正确,C、D错误.]
例5 AC [由右手定则可判断,当AB向左运动时,AB中感应电流方向为A→B;当AB向
右运动时,AB中感应电流方向为B→A,A正确,B错误;当CD向左运动时,CD中的感应
电流方向为C→D,AB中的感应电流方向为A→B;当CD向右移动时,AB中感应电流方向
为B→A,C正确,D错误.]
例6 BD [线框下落过程中穿过其磁通量减小,根据楞次定律可知线框中会产生感应电流
阻碍磁通量的变化,这种阻碍体现在线框将受到竖直向上的安培力作用,所以线框不是做自
由落体运动,故A、C错误;由于线框中垂直纸面向外的磁通量减小,则根据楞次定律可以
判断线框中感应电流的方向为abcda,故B正确;线框abcd为了“阻碍”Φ的减少,通过
面积的扩张减缓Φ的减少,故D正确.]
例7 B [开关S由断开状态拨至连接状态,不论拨至M端还是N端,通过圆环的磁通量均
增加,根据楞次定律(增离减靠)可知圆环会阻碍磁通量的增加,即向右运动,故选B.]
例8 BC [若A带正电,顺时针转动产生顺时针方向的电流,A内磁场方向垂直纸面向里,
当转速增大时,穿过B的磁通量增加,B中产生感应电流,根据楞次定律(增反减同)可知B
中产生逆时针方向的电流,A错误,B正确; 若A带负电,顺时针转动产生逆时针方向的
电流,A内磁场方向垂直纸面向外,当转速减小时,穿过B的磁通量减少,B中产生感应电
流,根据楞次定律(增反减同)可知B中产生逆时针方向的电流,C正确,D错误.]
例9 BC [MN向右运动,说明MN受到向右的安培力,因为MN处的磁场垂直纸面向
里――――→MN中的感应电流方向为M→N――――→L 中感应电流的磁场方向向上――――→.若L 中
1 2
磁场方向向上减弱――――→PQ中电流方向为Q→P且减小――――→向右减速运动;若L 中磁场方
2
向向下增强――――→PQ中电流方向为P→Q且增大――――→向左加速运动,故选B、C.]
第 2 讲 法拉第电磁感应定律、自感和涡流
例1 D [由法拉第电磁感应定律,可得大圆线圈产生的感应电动势E ===kS ,每个小
1 1
圆线圈产生的感应电动势E ===kS ,由线圈的绕线方式和楞次定律可得大、小圆线圈产
2 2
生的感应电动势方向相同,故线圈中总的感应电动势大小为 E=E +5E =k(S +5S),故D
1 2 1 2
正确,A、B、C错误.]
例2 C [设圆线框的半径为r,则由题意可知正方形线框的边长为2r,正六边形线框的边
长为r;所以圆线框的周长为C =2πr,面积为S =πr2.同理可知正方形线框的周长和面积分
2 2
别为C =8r,S =4r2,正六边形线框的周长和面积分别为C =6r,S =,三个线框材料粗细
1 1 3 3
相同,根据电阻定律R=ρ,可知三个线框电阻之比为R∶R∶R=C ∶C ∶C =8∶2π∶6
1 2 3 1 2 3
根据法拉第电磁感应定律有I==·,可得电流之比为I∶I∶I=2∶2∶
1 2 3即I=I>I,故选C.]
1 2 3
例3 D [有效切割长度即a、b连线的长度,如图所示
由几何关系知有效切割长度为R,所以产生的电动势为E=BLv=B·Rv,电流的方向为
a→b,所以U <0,由于在磁场部分的阻值为整个圆的,所以U =-B·Rv=-BRv,故选
ab ab
D.]
例4 BC [由题图(b)可知,导线框经过0.2 s全部进入磁场,则速度v== m/s=0.5 m/s,
选项B正确;由题图(b)可知,cd边切割磁感线产生的感应电动势E=0.01 V,根据E=Blv
得,B== T=0.2 T,选项A错误;根据右手定则及正方向的规定可知,磁感应强度的方向
垂直于纸面向外,选项C正确;在t=0.4 s至t=0.6 s这段时间内,导线框中的感应电流I=
= A=2 A, 所受的安培力大小为F=BIl=0.2×2×0.1 N=0.04 N,选项D错误.]
例5 ABD [由右手定则可知,金属棒顺时针转动时,感应电流方向由b到a,金属棒充当
电源,则a点的电势高于b点的电势,故A正确;金属棒产生的感应电动势 E=BLω·=3
V,则电阻R两端的电压为U =·E=2 V,故B正确;金属棒旋转半周的时间t′== s,通
R
过的电流I==1 A,产生的焦耳热为Q=I2rt′= J,故C错误,D正确.]
例6 D [闭合开关时,其线圈自感电动势等于电源电动势,自感线圈中电流为零,故 A错
误;A 中电流等于自感线圈中电流,自感线圈中电流从零开始逐渐增大,最后趋于稳定,
2
故A 中数据应为题图乙中b曲线,故B错误;断开开关前,两支路中电流相等,刚断开开
2
关时,回路中的电流不变,故灯泡不会发生明显闪亮,而是逐渐熄灭,故C错误;t 时刻,
1
两支路中电压相等,电流相等,则电阻相等,即小灯泡与线圈的电阻相等,故D正确.]
例7 B
例8 B [铜圆盘上存在许多小的闭合回路,当圆盘转动时,穿过小的闭合回路的磁通量发
生变化,回路中产生感应电流(涡流),此电流产生的磁场导致磁针沿逆时针方向(俯视)转动,
构成电磁驱动,故选B.]
专题强化二十三 电磁感应中的电路及图像问题
例1 (1)4×10-3 V (2)4.8×10-8 C
解析 (1)由法拉第电磁感应定律有E=S,S=L2,代入数据得E=4×10-3 V
(2)由闭合电路的欧姆定律得I=,由部分电路的欧姆定律得U=IR ,电容器所带电荷量为Q
2=CU=4.8×10-8 C.
例2 AD [根据楞次定律可知,ABFE回路电流方向为逆时针,ABCD回路电流方向为顺时
针,故A正确;根据法拉第电磁感应定律可知,感应电动势E=BLv,故B错误;当R =R
1
时,外电路总电阻R =,因此导体棒两端的电压即路端电压应等于BLv,故C错误;该电
外
路电动势E=BLv,电源内阻为R,当滑动变阻器接入电路中的阻值R =时,干路电流为I
1
=,滑动变阻器所在支路电流为I,容易求得滑动变阻器电功率为,故D正确.]
例3 ABD [当金属条ab进入磁场时,金属条ab相当于电源,由右手定则可知,电流从b
流向a,故a端电势高于b端电势,故A正确;E=Br2ω=1.6 V,由等效电路图(如图)可知R
=+R=R,U =·=0.4 V,I==4 A,故B正确;设车轮运动一周的时间为T,则每根金
总 ab
属条充当电源的时间为t=T=,则车轮运动一周电路中有电源的时间为t′=4t=T,可知一
个周期内,4个小灯总功率的平均值为P=EI= W,则自行车正常前进时,4个小灯总功率
的平均值为 W,故D正确;当金属条在磁场中时,该金属条中流经灯泡的电流方向为从车
轮边框流向轮轴,当该金属条在磁场外时,电流方向由轮轴流向车轮边框,故C错误.]
例4 C [0~2 s时间内,t=0时刻磁感应强度变化率最大,感应电流最大,I===0.01
A,A错误;3~5 s时间内电流大小不变,B错误;前2 s内通过线圈的电荷量q===0.01
C,C正确;第3 s内,B没有变化,线圈中没有感应电流产生,则线圈的发热功率最小,D
错误.]
例5 B [在过程Ⅰ中,根据法拉第电磁感应定律,有
E==,根据闭合电路的欧姆定律,有I=,且q=IΔt,在过程Ⅱ中,
1 1 1 1 1
有E==
2
I=,q=IΔt,又q=q,
2 2 2 2 1 2
即=,
所以=,故选B.]
例6 CD [0~1 s内产生的感应电动势为e ==2 V,方向为逆时针,同理1~5 s内产生的
1
感应电动势为e =1 V,方向为顺时针,A错误;0~1 s内的感应电流大小为i ==2 A,方
2 1
向为逆时针(负值),同理1~5 s内的感应电流大小为i =1 A,方向为顺时针(正值),B错误;
2
ab 边受到的安培力大小为 F=nBiL,可知 0~1 s 内 0≤F≤4 N,方向向下,1~3 s 内
0≤F≤2 N,方向向上,3~5 s内0≤F≤2 N,方向向下,C正确;线圈产生的焦耳热为Q=
eit,0~1 s内产生的热量为4 J,1~5 s内产生的热量为4 J,D正确.]
例7 C [在0~t 时间内,线框沿逆时针方向从题图所示位置开始(t=0)转过90°的过程中,
0产生的感应电动势为E =BωR2,由闭合电路的欧姆定律得,回路中的电流为I ==,根据
1 1
楞次定律判断可知,线框中感应电流方向为逆时针方向(沿ONM方向).在t ~2t 时间内,
0 0
线框进入第三象限的过程中,回路中的电流方向为顺时针方向(沿OMN方向),回路中产生
的感应电动势为E=Bω·R2+·2BωR2=BωR2=3E,感应电流为I=3I.在2t~3t 时间内,线
2 1 2 1 0 0
框进入第四象限的过程中,回路中的电流方向为逆时针方向(沿ONM方向),回路中产生的
感应电动势为E=Bω·R2+·2Bω·R2=BωR2=3E,感应电流为I=3I,在3t~4t 时间内,线
3 1 3 1 0 0
框出第四象限的过程中,回路中的电流方向为顺时针方向(沿OMN方向),回路中产生的感
应电动势为E=BωR2,回路电流为I=I,故C正确,A、B、D错误.]
4 4 1
例8 BC [设虚线方格的边长为x,根据题意知abcde每经过1 s运动的距离为x.在0~1 s
内,感应电动势E=2Bxv,感应电流I=恒定;在1~2 s内,切割磁感线的有效长度均匀增
1 1
加,故感应电动势及感应电流随时间均匀增加,2 s时感应电动势E =3Bxv,感应电流I
2 2
=;在2~4 s内,切割磁感线的有效长度均匀减小,感应电动势和感应电流均匀减小,4 s
时感应电动势E =Bxv,感应电流I =,故A错误,B正确.由题意可知,在0~4 s内,ab
3 3
边进入磁场的长度l=vt,根据F=BIl,在0~1 s内,I=恒定,则F =BI·vt=t∝t;在1~
ab 1
2 s内,电流I随时间均匀增加,切割磁感线的有效长度l′=[2x+v(t-1)]∝t,据F=IlB可
知F 与t为二次函数关系,图线是抛物线的一部分,且t=2 s时,F =;在2~4 s内,I随
ab ab
时间均匀减小,切割磁场的有效长度l″=3x-v(t-2)=5x-vt随时间均匀减小,故F 与t
ab
为二次函数关系,有极大值,当t=4 s时,F =,故C正确,D错误.]
ab
专题强化二十四 电磁感应中的动力学和能量问题
例1 A [线框先做自由落体运动,t 时刻ab边进入磁场做减速运动,加速度逐渐减小,而
1
A图像中的加速度逐渐增大,故A错误;线框先做自由落体运动,若进入磁场时重力小于
安培力,ab边进入磁场后做减速运动,当加速度减小到零时做匀速直线运动,cd边进入磁
场后线框做自由落体运动,加速度为g,故B正确;线框先做自由落体运动,ab边进入磁场
时若重力大于安培力,做加速度减小的加速运动,cd边进入磁场后线框做自由落体运动,
加速度为g,故C正确;线框先做自由落体运动,ab边进入磁场时若重力等于安培力,做匀
速直线运动,cd边进入磁场后,线框继续做自由落体运动,加速度为g,故D正确.]
例2 BCD [t时刻,金属杆的速度大小为v=at,产生的感应电动势为E=Blv,电路中的
感应电流I=,金属杆所受的安培力大小为F =BIl=,由牛顿第二定律可知外力F=ma+
安
mgsin 37°+,F是t的一次函数,选项A错误,B正确;t=0时,F最小,代入数据可求得a
=2 m/s2,选项D正确;t=2 s时,代入数据解得F=12 N,选项C正确.]
例3 (1)Q=CBLv(2)v=t
解析 (1)设金属棒下滑的速度大小为v,则感应电动势为E=BLv
平行板电容器两极板之间的电势差为U=E,设此时电容器极板上积累的电荷量为Q,按定
义有C=,联立可得Q=CBLv
(2)设金属棒的速度大小为v时,经历的时间为t,通过金属棒的电流为I,金属棒受到的磁
场力方向沿导轨向上,大小为F=BLI=CB2L2a
设在时间间隔(t,t+Δt)内流经金属棒的电荷量为ΔQ,则ΔQ=CBLΔv
按定义有I=,ΔQ也是平行板电容器极板在时间间隔(t,t+Δt)内增加的电荷量,由上式可
得,Δv为金属棒的速度变化量,金属棒所受到的摩擦力方向沿导轨斜面向上,大小为 F=
f
μF
N
式中,F 是金属棒对于导轨的正压力的大小,有F =mgcos θ,金属棒在时刻t的加速度方
N N
向沿斜面向下,设其大小为a,根据牛顿第二定律有
mgsin θ-F-F=ma,
f
即mgsin θ-μmgcos θ=CB2L2a+ma,联立上式可得
a=
由题意可知,金属棒做初速度为零的匀加速运动,t时刻金属棒的速度大小为v=.
例4 BD [金属棒下滑到弯曲部分底端时,根据动能定理有mgh=mv2,金属棒在磁场中
0
运动时产生的感应电动势E=BLv,金属棒受到的安培力F=BIL,当金属棒刚进入磁场中时,
感应电流最大,分析可得I =,所以A错误;金属棒穿过磁场区域的过程中通过金属棒的
max
电荷量q=t==,所以B正确;对整个过程由动能定理得mgh-W -μmgd=0,金属棒克
克安
服安培力做的功W =mgh-μmgd,金属棒内产生的焦耳热Q=W =mg(h-μd),所以C
克安 克安
错误,D正确.]
例5 D [导体棒运动过程中,安培力做功,电阻产生焦耳热,则棒和弹簧的机械能有损失,
则当棒再次回到初始位置时速度小于v,导体棒水平方向做的不是简谐运动,则导体棒回到
0
初始位置时产生的感应电动势E3 kΩ (2)70(68~72均可) B
t
解析 (1)由电路图可知,当满足=时,即R=3 kΩ时φ =φ ,此时由题图(b)可知温度为
t a b
25 ℃,即恒温箱内的稳定温度为 25 ℃;恒温箱内的电热丝加热时,R 的取值范围为R>3
t t
kΩ;
(2)P =0.1(t-t) (W),P 与温度t之间关系的图像如图;
Q 0 Q
由图可知,当温度为70 ℃左右时,发热功率和散热功率相等,即此时物体的温度不再变化;
由图可知,四个选项中,32~36 ℃时P -P 最大,即该过程用时最短,故选B.
R Q
例5 (1)b (2)调大 (3)300
(4)见解析图
解析 (1)亮度降低R 变大,电流减小,电磁继电器力减小,衔铁被放开,此时照明灯应被
0
点亮,所以单刀双掷开关应接b.
(2)电磁继电器的衔铁被吸下或放开有一个电流的临界值,对应一个总电阻的临界值,所以
滑动变阻器调得越大,对应R 的触发值越小,能使照明灯在不太暗的时候就点亮.
0
(3)电动势为3 V,触发电流为10 mA,可得对应总电阻为300 Ω.滑动变阻器选100 Ω,R 可
0
触发的阻值范围约为194~200 Ω,范围太小,对应亮度太低;300 Ω的阻值足够调控,对应R 触发值范围足够大;3 000 Ω阻值太大,对于某一亮度对应阻值的调节不精准.
0
(4)为了实现“亮度降低到一定程度触发衔铁吸下”可让R 与电磁继电器并联,这样亮度降
0
低时R 增大,电磁继电器中的电流增大,可触发衔铁被吸下,电路图如图.
0
第十四章 光
第 1 讲 光的折射 全反射
例1 AC [玻璃对单色光b的折射率较小,那么光路图如图所示,光在介质中的传播速度
为v=,因为玻璃对单色光b的折射率较小,所以a光束在玻璃砖中传播速度比b光小,故
A正确;
根据光路的可逆性可知:下表面出射角等于上表面的入射角,即两束光下表面的出射角相等,
故从玻璃砖下表面射出后,两束光仍然平行,故B错误;由于a光的折射率大,偏折程度大,
从下表面射出后沿水平方向侧移的距离大,故两束光从下表面射出后,两束光之间的距离一
定增大,故C正确,D错误.]
例2 D [如图所示,由几何关系可得入射角为i=45°,折射角为r=30°
根据折射定律有n===,
所以A错误;
根据v==c,所以B错误;
因为在Q处光还有反射光线,光束b、c和d的强度之和小于光束a的强度,所以C错误;
光束c的强度与反射光束PQ强度之和等于折射光束OP的强度,所以D正确.]
例3 (1)2.25×108 m/s (2)x=h
解析 (1)由于v=
代入数据解得v=2.25×108 m/s.
(2)打开出水口后,光路图如图所示
设水原来深度为H,折射角为β,由折射定律有n=,
解得sin β==0.6
由几何关系有htan α+(H-h)tan β=x+Htan β
代入数据解得x=h.
例4 AC [由于光发生全反射的条件之一是光由光密介质射入光疏介质,所以光导纤维的
折射率比空气的折射率大,即n>1,故A正确,B错误;该束光在交界面处发生全反射的
临界角C的正弦值为sin C=,该束光在光导纤维中的传播速度为v=,v在沿光导纤维方向
的分量为v=vsin C=,则该束光在光导纤维中传播的时间为t==,故C正确,D错误.]
1
例5 D [a光的照射面积大,知a光的临界角较大,根据sin C=知a光的折射率较小,所
以a光的频率较小,波长较大,根据v=知,在水中,a光的传播速度比b光大,同一种色
光在真空中和在水中频率相同,由v=λf可知,在水中,a光的波长比b光大,A、B、C错
误;设圆形复色光区域半径为r,圆形复色光区域边缘处b光恰好发生全反射,依据sin C
=,结合几何关系可知sin C=,而圆形复色光区域的面积S=πr2,联立解得S=,D正
确.]
例6 (1) (2)
解析 (1)光路图如图所示,根据几何关系可知
i=θ=30°,
1
i=60°
2
根据折射定律有
n=
解得n=
(2)设全反射的临界角为C,
则sin C==
光在玻璃球内的传播速度有v=
根据几何关系可知当θ=45°时,即光路为圆的内接正方形,从S发出的光线经多次全反射回
到S点的时间最短,则正方形的边长x=R,则最短时间为t==.
例7 a
解析 设光线在AB面的折射角为θ,则有sin 60°=nsin θ,由题知,光线经折射后在BC边
的N点恰好发生全反射,则有sin C=,C=90°-θ
联立解得tan θ=,n=
根据几何关系有tan θ==
解得NC=a-BN=a-
再由tan θ=,解得PC=a.
第 2 讲 光的干涉、衍射和偏振
例1 A [由公式Δx=λ可知=λ ,当改用波长为600 nm 的光实验时,则有=λ ,即==,
1 2
解得n=2,即P处将呈现第2条亮条纹,A正确.]
例2 AB
例3 C [薄膜干涉为前后两个面反射回来的光发生干涉形成干涉条纹,当入射光为复色光
时,出现彩色条纹.由于重力作用,肥皂膜前后表面的厚度从上到下逐渐增大,从而使干涉
条纹上疏下密,由于表面张力的作用,使得肥皂膜向内凹陷,故C正确,A、B、D错误.]
例4 B [双缝干涉条纹是等间距的,而单缝衍射条纹除中央亮条纹最宽、最亮之外,两侧
条纹亮度、宽度都逐渐减小,因此1、3为双缝干涉条纹,2、4为单缝衍射条纹.相邻亮条
纹间距Δx=λ,红光波长比蓝光波长长,则红光干涉条纹间距大于蓝光干涉条纹间距,即1、3分别对应红光和蓝光.而在单缝衍射中,当单缝宽度一定时,波长越长,衍射越明显,
即中央条纹越宽越亮,黄光波长比紫光波长长,即2、4分别对应紫光和黄光.综上所述,
1、2、3、4四幅图中亮条纹的颜色依次是:红、紫、蓝、黄,B正确.]
例5 (1)把自然光变成偏振光
(2)横波 (3)ACD
解析 (1)自然光通过偏振片后变为偏振光,故A的作用是把自然光变成偏振光.
(2)偏振现象证明光是一种横波.
(3)偏振片只能让一定偏振方向的光通过,没有样品时,要使到达 O处的光最强,偏振片
A、B的透光方向应相同;当放入样品时,由于样品的“旋光度”是α,即偏振方向不再与B
的透光方向平行,到达O处光的强度会减弱,A正确,B错误;偏振片B转过的角度等于
α,并使偏振片B的透振方向与偏振光的偏振方向平行时,光到达 O处的强度将再次最大,
C正确;同理,D正确.
例6 D [因为a光的偏折程度大于b光,所以根据折射定律得知:玻璃对a光的折射率大
于对b光的折射率,所以a单色光的频率比b单色光的频率大,故A错误;根据全反射临界
角公式sin C=,可知,a光的折射率大,则a光的临界角小于b光的临界角,故B错误;
对于任一光束研究:设入射角为i,折射角为r,玻璃砖的半径为R,则折射率为n=,光在
玻璃中传播速度为v=,光在玻璃中传播距离为s=2Rsin r,光在玻璃中传播时间为t=,联
立以上可得t=,i、R、c均相等,所以在玻璃砖中a单色光从O到A的传播时间等于b单色
光从O到B的传播时间,故C错误;根据折射率大,频率高,波长短,可知a光的折射率
大于b光的折射率,则a光在真空中的波长小于b光在真空中的波长,根据双缝干涉条纹间
距公式,可知a光产生的干涉条纹间距比b光小,故D正确.]
例7 (1) (2)1×10-9 s
(3)2.5 mm
解析 (1) 由几何关系知,光线在AC面发生全反射的入射角为45°,可知临界角C≤45°时,
折射率有最小值,由sin C=得n≥,即最小折射率为.
(2) 由几何关系可知,光线在玻璃砖中传播距离s=L,光线在玻璃砖中的传播速度v=
传播时间t=
代入数据解得最短时间t=1×10-9 s
(3) 由λ=,Δx=λ
联立代入数据解得Δx=2.5 mm.
实验十三 测量玻璃的折射率
例1 (1)AD (2)D (3)(4)偏小 不变
解析 (1)为了使作图误差更小,应选用两光学表面间距大的玻璃砖,A正确;根据折射定
律可知,如果两个光学面不平行,不影响入射角与折射角的值,所以对折射率的测定结果不
产生影响,B错误;为了准确测量光路图,应选用较细的大头针来完成实验,选用粗的大头
针完成实验时,容易出现观察误差,使光线实际并不平行,C错误;插在玻璃砖同侧的大头
针之间的距离应适当大些,引起的角度误差会减小,D正确.
(2)由题图可知,选用的玻璃砖两光学表面平行,则入射光线应与出射光线平行,B、C错误;
又光线在玻璃砖中与法线的夹角应小于光线在空气中与法线的夹角,A错误,D正确.
(3)由折射定律可知
n===.
(4)如图,甲同学在测定折射率时,作出的折射光线如图中虚线所示,实线表示实际光线,
可见折射角偏大,则由折射定律n =可知,折射率n偏小.用题图②测折射率时,只要操
作正确,折射率的测量值与玻璃砖形状无关,故乙同学测得的折射率与真实值相比不变.
例2 (1)(2)见解析图 (3)小一些 (4)1.5
解析 (1)(2)连接P 、P 表示入射光线,连接P 、P 表示出射光线,连接两光线与玻璃砖的
1 2 3 4
交点,即为折射光线,测量的入射角i、折射角r及光路图如图所示.
(3)为防止光线在弧面CD发生全反射,光线在弧面AB的入射角应适当小一些.
(4)根据题图乙得玻璃的折射率n==1.5.
例3 (1)全反射 (2)CD (3)
解析 (1)看不到P 和P 的像是由于光线在AB面上发生了全反射.
2 1
(2)(3)只要测出“CD”的长度l,就相当于测出了临界角的正弦值,即 sin C=,而sin C
=,
可得折射率n=.
例4 (1)
(2) (3)>
解析 (1)设折射角为r,如图所示.在△APD中,由几何关系得
1sin r=,光在AB面上发生折射,由折射定律可得介质的折射率为n==.
1
(2)射到AB面上的光线的入射角为θ 时,在AD面上发生全反射,说明在AD面上的入射角
2
等于临界角,设在AB面上的折射角为r ,由折射定律得=n,临界角计算公式为sin C=,
2
由几何关系可得r+C=90°,sin r=sin(90°-C)=cos C==,联立以上各式可得n=.
2 2
(3)设在AB面上的折射角为r,由几何关系可知在AD面上的入射角为i=90°-r,在AB面上
的折射角越小,则在AB面上的入射角越小,在AD面上的入射角越大,越容易发生全反射,
则有θ>θ.
1 2
实验十四 用双缝干涉测量光的波长
例1 (1)单缝 双缝 (2)ABD
(3)13.870 2.310 (4) 660
解析 (1)由题图可知,③为单缝,④为双缝.
(2)将光屏移近双缝,l减小,则由Δx=λ可知,在其他条件不变时,干涉条纹间距变小,故
A正确;将滤光片由蓝色的换成红色的,则波长λ变大,所以其他条件不变时,干涉条纹间
距变大,故B正确;将单缝向双缝移动一小段距离后,其他条件不变时,干涉条纹间距不
变,故C错误;换一个两缝之间距离更大的双缝,则d变大,在其他条件不变时,干涉条纹
间距变小,故D正确;去掉滤光片,其他条件不变,会形成彩色干涉条纹,故E错误.
(3)由题图乙可得读数为x =13.5 mm+37.0×0.01 mm=13.870 mm,由题图甲可得读数为x
2 1
=2 mm+32.0×0.01 mm=2.320 mm,则相邻亮条纹的间距
Δx== mm=2.310 mm.
(4)由Δx=λ可得λ=Δx,代入数据解得,波长为λ= m=6.6×10-7 m=660 nm.
例2 (1)D (2)50.15
解析 (1)若要使得分划板中心刻线与干涉条纹平行,则仅旋转毛玻璃处的测量头即可,故
选D.
(2)手轮上的示数是50 mm+0.05 mm×3=50.15 mm.
例3 (1) S′ (2)6×10-7 (3)AC
解析 (1)通过洛埃德镜在屏上可以观察到明暗相间的干涉条纹,这和双缝干涉实验得到的
干涉条纹一致.如果S被视为其中的一个缝,S′相当于另一个“缝”.
(2)第3条亮条纹中心到第12条亮条纹中心的间距为22.78 mm,则相邻亮条纹间距为Δx=
m≈2.53×10-3 m,等效双缝间的距离为d=2h=0.30 mm=3.0×10-4 m,根据双缝干涉条纹间距Δx=λ,则有λ=Δx= m
≈6×10-7 m.
(3)根据双缝干涉条纹间距Δx=λ可知,仅增大D、仅减小d或仅增大波长λ都能够增大光屏
上相邻两条亮条纹之间的距离,所以A、C正确.
第十五章 热学
第 1 讲 分子动理论 内能
例1 D [a千克气凝胶的摩尔数为,所含分子数为N=N ,选项A正确,不符合题意;气
A
凝胶的摩尔体积为V =,选项B正确,不符合题意;每个气凝胶分子的体积为V==,选
mol 0
项C正确,不符合题意;根据V =πd3,则每个气凝胶分子的直径为d=,选项D错误,符
0
合题意.]
例2 (1)5×10-26 kg (2)2×1024 (3)3×10-9 m
解析 (1)一个氮气分子的质量m=,解得m≈5×10-26 kg.
(2)设气囊内氮气的物质的量为n,则有n=,N=nN ,
A
联立解得N≈2×1024.
(3)气体分子间距较大,可以认为每个分子占据一个边长为r′的立方体,则有r′3=,解得
r′≈3×10-9 m
即气囊中氮气分子间的平均距离r=r′=3×10-9 m.
例3 D [布朗运动是固态或液态颗粒的无规则运动,不是气体介质分子的无规则运动,可
以间接反映气体分子的无规则运动;颗粒越小,气体分子对颗粒的撞击作用越不容易平衡,
布朗运动越明显,故A、B错误;在布朗运动中,颗粒本身并不是分子,而是由很多分子组
成的,所以颗粒无规则运动的轨迹不是分子无规则运动的轨迹,故C错误;在布朗运动中,
环境温度越高,固态或液态颗粒受到气体分子无规则热运动撞击的程度越剧烈,布朗运动越
明显,故D正确.]
例4 C [分子热运动与宏观运动无关,只与温度有关,故A错误;温度升高,分子热运动
更剧烈,分子平均动能增大,并不是每一个分子运动速率都会增大,故C正确,D错误;水
凝结成冰后,水分子的热运动不会停止,故B错误.]
例5 C [1克100 ℃ 的水需要吸收热量才能变为1克100 ℃的水蒸气,故1克100 ℃的
水的内能小于1克100 ℃的水蒸气的内能,选项A错误;物体的内能与物质的量、温度、
体积等因素有关,质量、温度、体积都相等的物体其物质的量不一定相等,内能不一定相等,
选项B错误;内能不同的物体,其温度可能相等,它们分子热运动的平均动能可能相等,选项C正确;一个木块被举高,木块的重力势能增大,但木块的分子间距不变,组成该木
块的所有分子的分子势能不变,选项D错误.]
例6 D [由图像可知,分子间距离为r 时分子势能最小,此时分子间的距离为平衡距离.
2
r=r 时两分子之间的距离小于平衡距离,可知r=r 时分子间的作用力表现为斥力,故A错
1 1
误;r 是平衡距离,当r<r<r 时,分子间的作用力表现为斥力,增大分子间距离,分子间
2 1 2
作用力做正功,分子势能E 减小,故B、C错误,D正确.]
p
例7 减小 减小 小于
解析 分子势能与分子间距离变化的关系图像如图所示,两分子间距减小到r 的过程中及由
2
r 减小到r 的过程中,分子间作用力做正功,分子势能减小;在间距等于r 处,分子势能最
2 1 1
小,小于零.
第 2 讲 固体、液体和气体
例1 C
例2 B [因为液体表面张力的存在,水黾才能在水面上行走自如,故A错误;将棉线圈中
肥皂膜刺破后,扩成一个圆孔,是表面张力作用的结果,故B正确;液晶显示器是利用液
晶光学性质具有各向异性的特点制成的,故C错误;从题图丁中可以看出酱油与左边材料
浸润,与右边材料不浸润(不浸润液滴会因为表面张力呈球形),故D错误.]
例3 D [密闭容器中的氢气质量不变,分子个数N 不变,根据n=可知,当体积增大时,
0
单位体积的分子个数n变少,氢气分子的密集程度变小,故A错误;气体压强产生的原因
是大量气体分子对容器壁进行持续的、无规则的撞击,压强增大并不是因为分子间斥力增大,
故B错误;普通气体在温度不太低、压强不太大的情况下才能看作理想气体,故 C错误;
温度是气体分子平均动能的标志,大量气体分子的速率呈现“中间多,两头少”的规律,温
度变化时,大量分子的平均速率会变化,即分子速率分布中各速率区间的分子数占总分子数
的百分比会变化,故D正确.]
例4 p+ p- p+
0 0 0解析 题图甲中选活塞为研究对象,受力分析如图(a)所示,由平衡条件知p S=pS+mg,
A 0
得p =p+;
A 0
题图乙中选汽缸为研究对象,受力分析如图(b)所示,由平衡条件知pS=p S+Mg,得p =
0 B B
p-;
0
题图丙中选活塞为研究对象,受力分析如图(c)所示,p S sin α=pS +F +mg,F =
C 下 0 上 N N
Mg,S sin α=S ,S =S,由以上可得p =p+.
下 上 上 C 0
例5 甲:p-ρgh 乙:p-ρgh
0 0
丙:p-ρgh 丁:p+ρgh
0 0 1
戊:p=p+ρg(h-h-h)
a 0 2 1 3
p=p+ρg(h-h)
b 0 2 1
解析 题图甲中,以高为h的液柱为研究对象,由平衡条件有
p S+ρghS=pS
甲 0
所以p =p-ρgh
甲 0
题图乙中,以B液面为研究对象,由平衡条件有
p S+ρghS=pS
乙 0
p =p-ρgh
乙 0
题图丙中,以B液面为研究对象,由平衡条件有
p S+ρghsin 60°·S=pS
丙 0
所以p =p-ρgh
丙 0
题图丁中,以A液面为研究对象,由平衡条件有p S=pS+ρgh S
丁 0 1
所以p =p+ρgh
丁 0 1
题图戊中,从开口端开始计算,右端大气压强为p,同种液体同一水平面上的压强相同,
0
所以b气柱的压强为p=p+ρg(h-h),
b 0 2 1
故a气柱的压强为p=p-ρgh =p+ρg(h-h-h).
a b 3 0 2 1 3
例6 (1)T (2)
1
解析 (1)活塞被卡子托住前,气体经历等压变化,设活塞刚刚接触卡子时气体的温度为
T,根据盖—吕萨克定律有=
2
式中V=SL,V=SL
1 1 2 2
根据题意L=L=L
2 1 1联立解得T=T
2 1
(2)活塞被卡子托住后,再降低温度,气体经历等容变化,根据查理定律有=,式中 p =p.
3 0
根据力的平衡条件有p=p=p+
2 1 0
联立可得T=.
3
例7 (1)228 K (2)5.1 cm
解析 (1)设“山”形管的横截面积为S,对A管上端气体,初态有p =76 cmHg+4 cmHg=
1
80 cmHg,T=300 K
1
末态有p=76 cmHg
2
气柱长度为L=L=10 cm,
1
L=8 cm
2
根据理想气体状态方程有
=
故有=,
解得T= 228 K
2
(2) 由于T不变,对A管上端气体根据玻意耳定律可得 pV =pV ,p =p ,即有pLS=
1 1 3 3 3 0 1 1
pLS
0 3
解得L≈10.53 cm
3
所以C管中水银长度的增加量为
ΔL=4 cm+0.53 cm+0.53 cm≈5.1 cm
即活塞上移的距离为5.1 cm.
例8 A [由题图可知,a→b过程,气体发生等温变化,气体压强减小,体积增大,故A
正确;由理想气体状态方程=C可知p=CT,斜率k=CT,连接O、b的直线比连接O、c的
直线的斜率小,所以b的温度低,b→c过程,温度升高,压强增大,且体积也增大,故B
错误;c→d过程,气体压强不变,体积变小,由理想气体状态方程=C可知,气体温度降
低,故C错误;d→a过程,气体体积不变,压强变小,由理想气体状态方程=C可知,气
体温度降低,故D错误.]
例9 1
解析 由体积-温度(V-t)图像可知,直线Ⅰ为等压线,则a、b两点压强相等,则有=1;
t=0 ℃时,当气体体积为V 时,设其压强为p ,当气体体积为V 时,设其压强为p ,温度
1 1 2 2
相等,由玻意耳定律有pV=pV
1 1 2 2
由于直线Ⅰ和Ⅱ为两条等压线,则有p=p,p=p
1 b 2 c
联立解得==.专题强化二十六 气体实验定律的综合应用
例1 (1)360 K (2)
解析 (1)开始时封闭气体的压强为p =p +p =125 cmHg,温度为T =(t +273) K=300
1 0 d 0 0
K,当温度为 T 时,管内水银恰好有一半溢出, 封闭气体的压强为 p =p +p =100
1 2 0 d
cmHg,根据理想气体状态方程可得=,解得T=360 K.
1
(2)当玻璃管与水平面间的夹角为θ时,管内水银恰好有一半溢出,此时封闭气体的压强为
p=p+psin θ,根据玻意耳定律有p(L-)S=pLS,解得sin θ=.
3 0 d 3 1 0
例2 (1)70 cmHg (2)327.3 K
解析 (1)设大气压强为p,
0
对气体a则有p=p+ρgh
a 0 1
对气体b则有p=p-ρgh
b a 2
联立两式代入数据得p=70 cmHg.
b
(2)升温过程中气体b发生等压变化,则温度升高,体积增大,设右侧水银柱下降x,变化前
后对比如图,气体a体积V=(L-x+h-h-x)S
a a 2 1
对气体b,由盖-吕萨克定律=得=
缓慢升高环境温度过程中气体a也发生等压变化,由盖-吕萨克定律得=
联立解得T= K≈327.3 K.
2
例3 (1)p (2)h
0
解析 (1)由题意知封闭气体做等容变化,初态时热力学温度为T,压强为2p,
0 0
末态时热力学温度为T=T,压强设为p.
1 0 1
根据查理定律有=,
解得p=p
1 0
(2)封闭气体初态压强为2p,体积V=Sh,
0 0
汽缸倒置后,设气体压强为p,活塞到汽缸底部的距离为H,
2
则气体体积V=SH,根据平衡条件可知pS+mg=pS,解得p=3p
2 0 2 2 0
根据玻意耳定律有2pV=pV,解得H=h,所以稳定时活塞到汽缸底部的距离为h.
0 0 2 2
例4 (1)2p p (2)
0 0
解析 (1)旋转过程,上部分气体发生等温变化,根据玻意耳定律可知p·SL=p·SL,解得旋转后上部分气体压强为p=2p
0 0 1 0 1 0
旋转过程,下部分气体发生等温变化,下部分气体体积增大为 SL +SL =SL ,则p·SL =
0 0 0 0 0
p·SL,解得旋转后下部分气体压强为p=p.
2 0 2 0
(2)对“H”型连杆活塞整体受力分析,活塞的重力mg竖直向下,上部分气体对活塞的作用
力竖直向上,下部分气体对活塞的作用力竖直向下,大气压力上下部分抵消,根据平衡条件
可知pS=mg+pS
1 2
解得活塞的质量为m=.
例5 D [根据玻意耳定律可知
pV+5pV=p×5V
0 0 0 1
已知p=750 mmHg,V=60 cm3,
0 0
p=750 mmHg+150 mmHg
1
=900 mmHg,代入数据整理得V=60 cm3,故选D.]
例6 (1)0.42 m3 (2)0.72
解析 (1)设气闸舱内原有气体的体积为V ,压强为p,舱内压强降低后气体压强为p′,原
1
有气体在此压强下体积为V ,由玻意耳定律可得pV =p′V ,设抽掉的气体占原来气体的
2 1 2
比率为k,由数学关系可得k=,设抽掉气闸舱原有的气体体积ΔV=kV ,联立解得ΔV=
1
0.42 m3.
(2)温度与压强降低后,原有气体在此压强下体积为V ,由理想气体状态方程可得=,设气
3
闸舱内存留气体与原气体的体积比为n,n=,联立解得n≈0.72.
例7 (1)21 ℃ (2)124
解析 (1)大钢瓶的容积一定,从北方到该市对大钢瓶内气体,有=
解得T=294 K,故t=21 ℃
2 2
(2)设大钢瓶内氧气由状态p、V 等温变化为停止分装时的状态p、V,
2 2 3 3
则p=1.26×107 Pa,V=0.04 m3,p=2×105 Pa
2 2 3
根据pV=pV 得V=2.52 m3
2 2 3 3 3
可用于分装小钢瓶的氧气
p=2×105 Pa,
4
V=(2.52-0.04) m3=2.48 m3
4
分装成小钢瓶的氧气p=4×105 Pa,V=nV
5 5
其中小钢瓶体积为V=0.01 m3
根据pV=pV 得n=124
4 4 5 5
即一大钢瓶氧气可分装124小钢瓶.第 3 讲 热力学定律与能量守恒定律
例1 B [由热力学第一定律ΔU=W+Q得Q=ΔU-W=-1.3×105 J-7.0×104 J=-
2.0×105 J,即气体向外界放出热量2.0×105 J,B正确.]
例2 ACD [根据汽缸导热且环境温度没有变,可知汽缸内的温度也保持不变,则整个过
程,理想气体的分子平均动能保持不变,内能不变,A正确,B错误;由内能不变可知理想
气体向外界释放的热量等于外界对理想气体做的功:Q=W0,
且体积增大,气体对外界做功,即W<0,由热力学第一定律ΔU=W+Q,可知a→b过程中
气体吸热,A错误,B正确;根据理想气体的状态方程=C,可知,p-V图像的坐标值的乘
积反映温度,a状态和c状态的坐标值的乘积相等,而中间状态的坐标值乘积更大,则 a→c
过程的温度先升高后降低,且状态b的温度最高,C错误;a→c过程气体体积增大,气体对
外界做功,即外界对气体做负功,D错误.]
例5 AC [在C→A过程中,压强不变,气体体积减小,外界对气体做功,根据 W =
CA
p·ΔV,得W =300 J,A正确;由题知B→C过程中气体做功绝对值是C→A过程中气体做
CA
功绝对值的3倍,则B→C的过程中气体对外界做功900 J,B错误;A→B→C→A,温度不
变,则内能变化量ΔU=0,A→B过程,气体体积不变,做功为零;B→C的过程中气体对外
界做功900 J;C→A的过程中外界对气体做功300 J,故W=W +W =-600 J,Q=ΔU-W
CA BC
=600 J,则整个过程中气体从外界吸收600 J的热量,C正确,D错误.]
例6 (1)Q-(pS+f)L
0
(2)T
0
解析 (1)活塞缓慢移动时受力平衡,
由平衡条件得pS=pS+f
1 0
气体对外界做功,则W=-pSL
1
根据热力学第一定律ΔU=Q+W
解得ΔU=Q-(pS+f)L.
0
(2)活塞发生移动前,气体发生等容变化,则有=,活塞向右移动L,气体发生等压变化,则
有=,且V=2V.
2 1
解得T=T.
0
例7 (1)0.5V (2)pV+aT
0 0
解析 (1)在气体压强由1.2p 下降到p 的过程中,气体体积不变,温度由2.4T 变为T ,由
0 0 0 1
查理定律得=,解得T=2T
1 0
在气体温度由T 变为T 的过程中,气体体积由V减小到V ,气体压强不变,由盖—吕萨克
1 0 1
定律得=,解得V=0.5V.
1
(2)活塞下降过程中,外界对气体做的功为 W=p(V-V),在这一过程中,气体内能的变化
0 1
量为ΔU=a(T -T),由热力学第一定律得Q=ΔU-W=-aT -pV,故汽缸内气体放出的
0 1 0 0
热量为pV+aT.
0 0
实验十五 用油膜法估测油酸分子的大小
例1 (1)ABD (2)②8×10-12
(3)1×10-2 8×10-10 (4)偏大
解析 (1)将油膜看成单分子油膜,油膜是呈单分子分布的,单分子油膜的厚度等于分子的
直径,A正确;不考虑各个油酸分子间的间隙,认为这些油酸分子是一个一个紧挨在一起的,
分子之间没有间隙,B正确,C错误;将油酸分子看成球形,测出油酸的体积V和形成单分
子油膜的面积S,单分子油膜的厚度d=,可以认为厚度等于分子的直径,D正确.
(2)② 一滴油酸酒精溶液中含有油酸的体积为V=× mL=8×10-6 mL=8×10-12 m3.
(3)由题图可知油膜面积为
S=1×10-2 m2
油酸分子的直径为d== m=8×10-10 m.
(4)若滴入75滴油酸酒精溶液的体积不足1 mL,则代入计算的纯油酸的体积偏大,可知测量
结果偏大.
例2 (1)cadb (2)3.3×10-9 (3)AC
(4)B
解析 (1)“用油膜法估测油酸分子的大小”实验步骤为:配制油酸酒精溶液→测定一滴油
酸酒精溶液的体积再准备浅水盘→形成油膜→描绘油膜边缘测量油膜面积并计算分子直径,
则操作先后顺序应是cadb;
(2)油膜面积约占120格,面积约为S=120×1×10-4 m2=1.2×10-2 m2
一滴油酸酒精溶液含有纯油酸的体积为V=××10-6 m3=4×10-11 m3
油酸分子的直径约等于油膜的厚度d== m≈3.3×10-9 m.
(3)计算油酸分子直径的公式是d=V是纯油酸的体积,S是油膜的面积,将滴入的油酸酒精溶液体积作为油酸体积进行计算,
则V取值偏大,导致d偏大,故A正确;油酸酒精溶液长时间放置,酒精挥发使溶液的浓
度增大,则V取值偏小,导致d偏小,故B错误;计算油膜面积时,只数了完整的方格数,
则S取值偏小,导致d偏大,故C正确;求每滴溶液中纯油酸的体积时,1 mL的溶液的滴
数多记了10滴,由V= mL可知,纯油酸的体积将偏小,导致d偏小,故D错误.
1
(4)设一个油酸分子体积为V,则V=π()3,由N =可知,要测定阿伏加德罗常数,还需知道
A
油酸的摩尔体积,故B正确.
实验十六 探究等温情况下一定质量气体压强与体积的关系
例1 (1)不需要 (2)AB
(3)② 漏气
解析 (1)由于注射器的横截面积相等,所以在此实验中可用长度代替体积,故不需要测空
气柱的横截面积.
(2)柱塞上涂油,既减小摩擦,又防止漏气,故A正确;若急速推拉活塞,则有可能造成漏
气和不满足等温条件,所以应缓慢推拉活塞,故B正确;手握注射器会造成温度变化,故C
错误;压强由压力表测量,不是由竖直的平衡条件计算,所以不需要竖直放置,故D错误.
(3)由=C,可得p=CT·,则p-图像的斜率为k=CT,又因pV=CT,且p与V的乘积值越
来越小,则图像的斜率越来越小,图像将向下弯曲,图②是小明组所绘,造成这种情况的原
因可能是漏气.
例2 (1)质量 温度
(2)pV=pV (3)AC
1 1 2 2
解析 (1)探究气体等温变化的规律,需要保持不变的量是气体的质量和温度.
(2)一定质量的气体在温度保持不变时,压强与体积成反比,即压强与体积的乘积不变,如
果在误差允许范围内,p、p、V、V 之间满足关系式是pV=pV.
1 2 1 2 1 1 2 2
(3)由理想气体状态方程=C,可知pV=CT,对于一定质量的气体,温度T越高pV越大,即
V-p图像离坐标轴越远,已知T>T,故A正确,B错误;由理想气体状态方程=C,可知
1 2
V=CT,对于一定质量的气体,温度T越高,V-图像的斜率越大,已知T >T ,故C正确,
1 2
D错误.
例3 (1)AC (2) (3)b b+V
0
解析 (1)该气体发生等温变化,从注射器的刻度上读出体积,因此传感器A为压强传感器,
A正确;在步骤①中,将注射器与传感器A连接前,应使注射器封住一定质量的气体,因此
不必将活塞移至注射器最右端,B错误;操作中,不可用手握住注射器封闭气体部分,是为
了保持封闭气体的温度不变,C正确;若实验过程中不慎将活塞拔出注射器,气体的质量发生变化,因此以上数据全部作废,应重新做实验,D错误.
(2)作出图像为一条直线,根据玻意耳定律pV=C可知,x轴应为.
(3)设石子体积为V ,对一定质量的气体,根据玻意耳定律可得p(V-V)=C,整理得V=+
1 1
V,因此可得V=b;软管容积为V 不能忽略,则表达式为p(V+V-V)=C,整理得V=+
1 1 0 0 1
V-V,可知V-V=b,故V=b+V.
1 0 1 0 1 0
第十六章 原子结构和波粒二象性 原子核
第 1 讲 光电效应 波粒二象性
例1 AD [能完全吸收照射到它上面的各种频率的电磁波而不发生反射的物体称为黑体,
选项A正确;由题图可知,随温度的降低,各种波长的光辐射强度都有所减小,选项 B错
误;随着温度的升高,黑体辐射强度的极大值向波长较短的方向移动,选项C错误;一般
物体辐射电磁波的情况除了与温度有关,还与材料的种类及表面情况有关,但黑体辐射电磁
波的情况只与它的温度有关,选项D正确.]
例2 B [一个光子的能量为E=hν,ν为光的频率,光的波长与频率的关系为c=λν,光源
每秒发出的光子的个数为n==,P为光源的功率,光子以球面波的形式传播,那么以光源
为原点的球面上的光子数相同,此时距光源的距离为R处,每秒垂直通过每平方米的光子
数为3×1014个,那么此处的球面的表面积为S=4πR2,则=3×1014,
联立以上各式解得R≈3×102 m,故选B.]
例3 D [光电子的最大初动能与光照时间无关,与入射光的频率有关,故 A错误;发生光
电效应的条件是入射光频率大于或等于截止频率,入射光强,不一定能发生光电效应,故 B
错误;根据光电效应方程E =eU=hν-W 知遏止电压与入射光的频率有关,与强度无关,
k c 0
故C错误;当入射光频率小于截止频率时,不论光照时间多长,都不能发生光电效应,故D
正确.]
例4 D [由题可知,遏止电压U=1.7 V,最大初动能E =eU=1.7 eV,A错误;根据光
c k c
电效应方程可知,逸出功W =E-E =1.05 eV,B错误;断开开关S,光电效应依然发生,
0 k
有光电流,光电管、电流表、滑动变阻器构成闭合回路,电流表中电流不为零,C错误;电
源电压为反向电压,当触点c向a端滑动时,反向电压增大,电压表示数增大,电流表示数
减小,D正确.]
例5 C [根据题图可知单色光c的遏止电压小于单色光b的遏止电压,根据eU=E=hν-
c k
W 可知,b、c两种单色光频率不同,所以颜色不同,故A错误;由题图可知单色光a、b的
0遏止电压相同,则单色光a、b的频率相同,在光的频率相同的情况下,入射光越强,饱和
电流越大,单色光a的饱和电流大于单色光b的饱和电流,则单色光a的光照强度大于单色
光b的光照强度,故B错误;电路中的饱和电流与光照强度有关,在其他条件相同的情况下,
光照强度越大,光电流越大,故增大c光的光照强度,电路中的饱和电流将增大,故C正确;
射出的光电子的最大初动能与光照强度无关,故D错误.]
例6 C [光电管所加电压为正向电压,则根据爱因斯坦光电效应方程可知光电子到达A极
时动能的最大值E =Ue+hν-hν ,可知E -U图像的斜率相同,均为e;截止频率越
km 截止 km
大,则图像在纵轴上的截距越小,因ν<ν,则图像C正确,A、B、D错误.]
1 2
例7 BD [根据动量的大小与动能的关系可知发射电子的动能约为E == J≈8.0×10-17
k
J,故A错误;发射电子的物质波波长约为λ== m=5.5×10-11 m,故B正确;物质波也
具有波粒二象性,故电子的波动性是每个电子本身的性质,则每个电子依次通过双缝都能发
生干涉现象,只是需要大量电子显示出干涉图样,故C错误,D正确.]
例8 D [题图(a)只有分散的亮点,表明光具有粒子性;题图(c)呈现干涉条纹,表明光具有
波动性,A、B错误;紫外线也具有波粒二象性,也可以观察到类似的图像,C错误;实验
表明光是一种概率波,D正确.]
第 2 讲 原子结构 原子核
例1 A [在实验中观察到的现象是绝大多数α粒子穿过金箔后,仍沿原来方向前进,少数
发生了较大偏转,极少数偏转超过90°,有的甚至被弹回接近180°,所以A正确;使α粒子
发生明显偏转的力是来自带正电的核,当α粒子接近核时,核的排斥力使α粒子发生明显偏
转,电子对α粒子的影响忽略不计,所以B错误;实验表明原子中心有一个极小的核,它占
有原子体积的极小部分,实验事实否定了汤姆孙的原子结构模型,所以C错误;实验表明
原子中心的核带有原子的全部正电及绝大部分质量,所以D错误.]
例2 C [由题知使处于基态的氢原子被激发后,可辐射蓝光,不辐射紫光,则由蓝光光子
能量范围可知氢原子从n=4能级向低能级跃迁可辐射蓝光,不辐射紫光,即从n=4跃迁到
n=2辐射蓝光,则需激发氢原子到n=4能级,则激发氢原子的光子能量为 ΔE=E -E =
4 1
12.75 eV,故选C.]
例3 B [从n=3跃迁到n=1放出的光电子能量最大,根据E =E-W ,可得此时最大初
k 0
动能为E=9.8 eV,故A错误;从n=3跃迁到n=1放出的光电子能量最大,根据p==,E
k
=hν,可知动量也最大,故B正确;大量氢原子从n=3的激发态跃迁到基态能放出C=3
种频率的光子,其中从n=3跃迁到n=2放出的光子能量为ΔE =-1.51 eV-(-3.4 eV)=
1
1.89 eV<2.29 eV,不能使金属钠发生光电效应,其他两种均可以,故C错误;由于从n=3跃迁到n=4需要吸收的光子能量为ΔE =1.51 eV-0.85 eV=0.66 eV,所以用0.85 eV的光
2
子照射,不能使氢原子跃迁到n=4激发态,故D错误.]
例4 C [根据题意设半衰期为t 的元素原子核数为x,另一种元素原子核数为y,依题意有
0
x+y=N,经历2t 后有x+y=,
0
联立可得x=N,y=N,
在t=4t 时,原子核数为x的元素经历了4个半衰期,原子核数为y的元素经历了2个半衰
0
期,则此时未衰变的原子核总数为
n=x+y=,故选C.]
例5 BC [衰变后两个新核速度方向相反,受力方向也相反,根据左手定则可判断出两个
粒子带同种电荷,所以衰变是α衰变,衰变后的新核由洛伦兹力提供向心力,有Bqv=m,
可得r=,衰变过程遵循动量守恒定律,即mv相同,所以电荷量与半径成反比,有q∶q=
1 2
r∶r,但无法求出质量比,故A、D错误,B、C正确.]
2 1
例6 C [根据核反应的质量数和电荷数守恒可知,A选项反应中的X质量数为4,电荷数
为2,为α粒子,核反应类型为α衰变,选项A错误;B选项反应中的Y质量数为1,电荷
数为0,为中子,核反应类型为轻核聚变,选项 B错误;C选项反应中的K质量数总数为
10,电荷数为0,则K为10个中子,核反应类型为重核裂变,选项C正确; D选项反应中
的Z质量数为1,电荷数为1,为质子,核反应类型为人工转变,选项D错误.]
例7 A [根据质量数守恒和电荷数守恒可知,X的质量数为7,电荷数为3,即原子核X
是Li,A正确,C错误;由选项A可知,原子核X是Li,则核反应方程为Be+e→Li+ν,
e
则反应前的总质子数为4,反应后的总质子数为3,B错误;中微子不带电,则中微子ν 的
e
电荷量与电子的不相同,D错误.]
例8 C [因电子质量远小于质子的质量,计算中可忽略不计,核反应质量亏损 Δm=
4×1.007 8 u-4.002 6 u=0.028 6 u,释放的能量ΔE=0.028 6×931 MeV≈26.6 MeV,选项C
正确.]
例9 (1)Rn→Po+He
(2)6.89 MeV
(3)6.77 MeV
解析 (1)根据质量数和电荷数守恒有Rn→Po+He
(2)质量亏损
Δm=222.086 6 u-4.002 6 u-218.076 6 u=0.007 4 u,
ΔE=Δm×931 MeV,
解得ΔE≈6.89 MeV
(3)设α粒子、钋核的动能分别为E 、E ,动量分别为p 、p ,
kα k钋 α 钋
由能量守恒定律得ΔE=E +E
kα k钋由动量守恒定律得
0=p +p ,又E=
α 钋 k
故E ∶E =218∶4
kα k钋
解得E ≈6.77 MeV.
kα
