文档内容
知识点 46:探究动能定理及用能的方法测量动摩擦因数
题型一:探究动能定理
【知识思维方法技巧】
牵引法:重物拉线跨过定滑轮牵引小车或滑块在轨道上运动
纸带法:测出计数点间距,由打出某点前后两点时间内的平均速度替代打出该点时的速度
光电门法:测出遮光条的宽度及遮光时间,由遮光时间内的平均速度代替物体经过光电门
时的速度
类型一:应用打点计时器探究动能定理
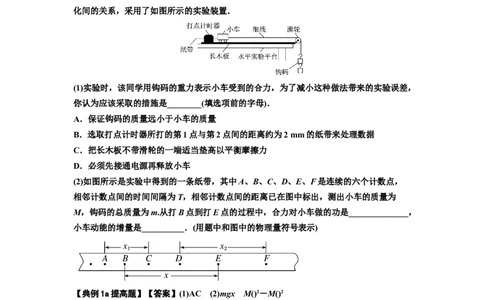
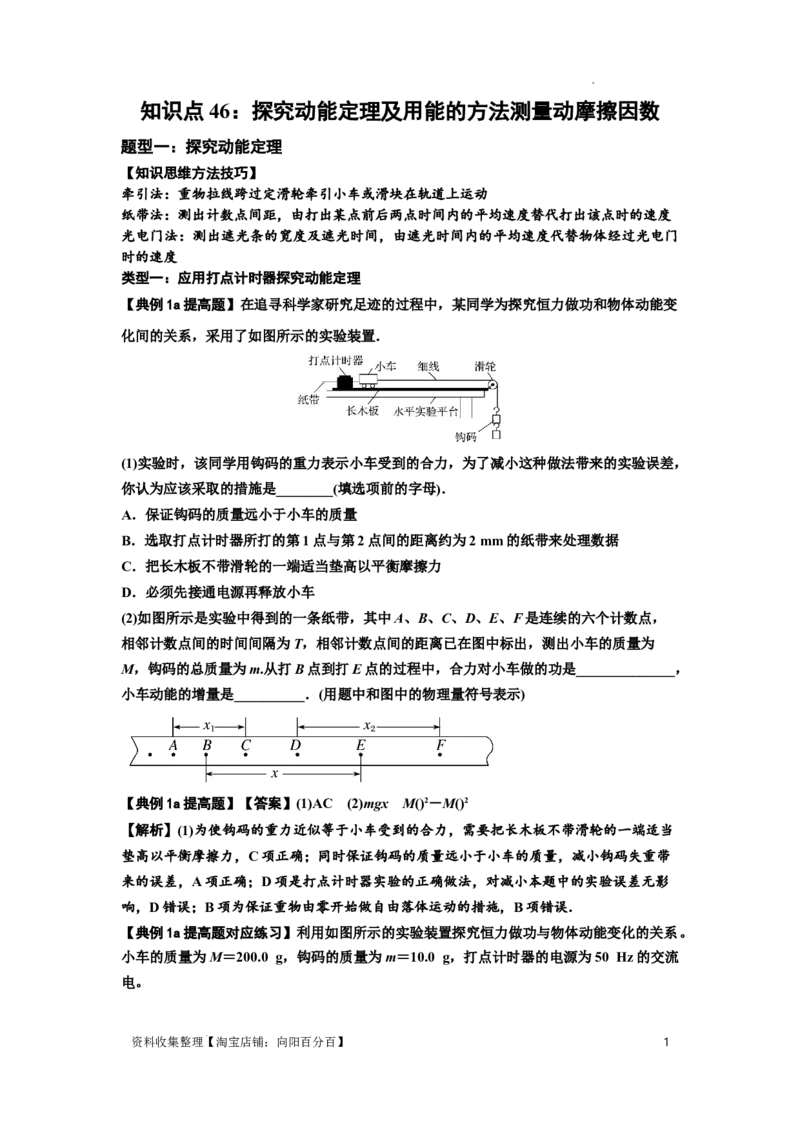
【典例1a提高题】在追寻科学家研究足迹的过程中,某同学为探究恒力做功和物体动能变
化间的关系,采用了如图所示的实验装置.
(1)实验时,该同学用钩码的重力表示小车受到的合力,为了减小这种做法带来的实验误差,
你认为应该采取的措施是________(填选项前的字母).
A.保证钩码的质量远小于小车的质量
B.选取打点计时器所打的第1点与第2点间的距离约为2 mm的纸带来处理数据
C.把长木板不带滑轮的一端适当垫高以平衡摩擦力
D.必须先接通电源再释放小车
(2)如图所示是实验中得到的一条纸带,其中A、B、C、D、E、F是连续的六个计数点,
相邻计数点间的时间间隔为T,相邻计数点间的距离已在图中标出,测出小车的质量为
M,钩码的总质量为m.从打B点到打E点的过程中,合力对小车做的功是______________,
小车动能的增量是__________.(用题中和图中的物理量符号表示)
【典例1a提高题】【答案】(1)AC (2)mgx M()2-M()2
【解析】(1)为使钩码的重力近似等于小车受到的合力,需要把长木板不带滑轮的一端适当
垫高以平衡摩擦力,C项正确;同时保证钩码的质量远小于小车的质量,减小钩码失重带
来的误差,A项正确;D项是打点计时器实验的正确做法,对减小本题中的实验误差无影
响,D错误;B项为保证重物由零开始做自由落体运动的措施,B项错误.
【典例1a提高题对应练习】利用如图所示的实验装置探究恒力做功与物体动能变化的关系。
小车的质量为M=200.0 g,钩码的质量为m=10.0 g,打点计时器的电源为50 Hz的交流
电。
资料收集整理【淘宝店铺:向阳百分百】 1
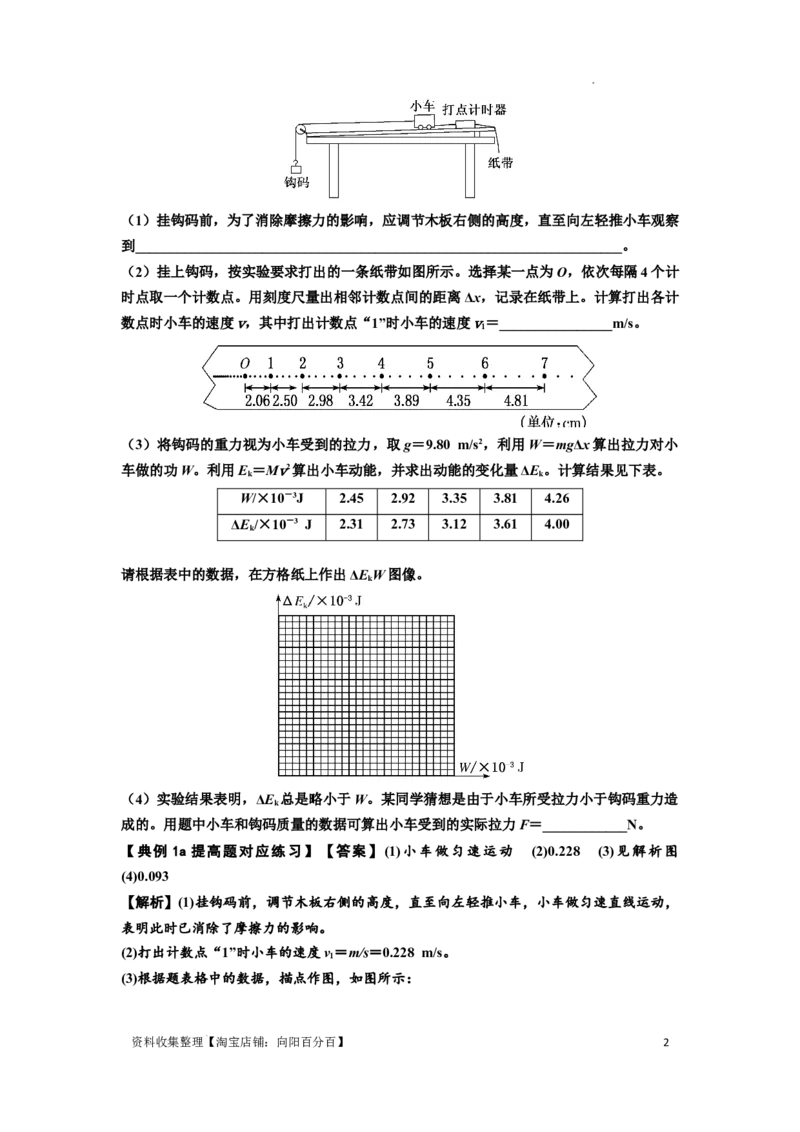
学科网(北京)股份有限公司(1)挂钩码前,为了消除摩擦力的影响,应调节木板右侧的高度,直至向左轻推小车观察
到_____________________________________________________________________。
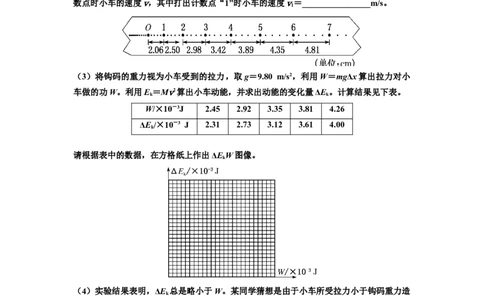
(2)挂上钩码,按实验要求打出的一条纸带如图所示。选择某一点为O,依次每隔4个计
时点取一个计数点。用刻度尺量出相邻计数点间的距离Δx,记录在纸带上。计算打出各计
数点时小车的速度v,其中打出计数点“1”时小车的速度v=________________m/s。
1
(3)将钩码的重力视为小车受到的拉力,取g=9.80 m/s2,利用W=mgΔx算出拉力对小
车做的功W。利用E =Mv2算出小车动能,并求出动能的变化量ΔE 。计算结果见下表。
k k
W/×10-3J 2.45 2.92 3.35 3.81 4.26
ΔE /×10-3 J 2.31 2.73 3.12 3.61 4.00
k
请根据表中的数据,在方格纸上作出ΔE W图像。
k
(4)实验结果表明,ΔE 总是略小于W。某同学猜想是由于小车所受拉力小于钩码重力造
k
成的。用题中小车和钩码质量的数据可算出小车受到的实际拉力F=____________N。
【典例 1a 提高题对应练习】【答案】(1)小车做匀速运动 (2)0.228 (3)见解析图
(4)0.093
【解析】(1)挂钩码前,调节木板右侧的高度,直至向左轻推小车,小车做匀速直线运动,
表明此时已消除了摩擦力的影响。
(2)打出计数点“1”时小车的速度v=m/s=0.228 m/s。
1
(3)根据题表格中的数据,描点作图,如图所示:
资料收集整理【淘宝店铺:向阳百分百】 2
学科网(北京)股份有限公司(4)由于W=mgΔx,ΔE =FΔx,则有F=mg=×0.01×9.8 N≈0.093 N。
k
类型二:应用光电门探究动能定理
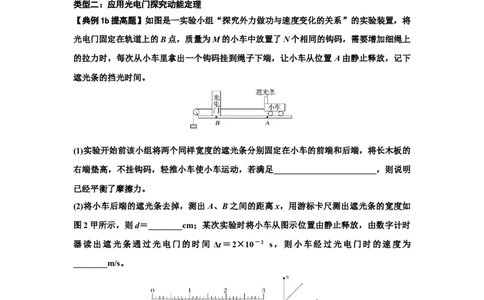
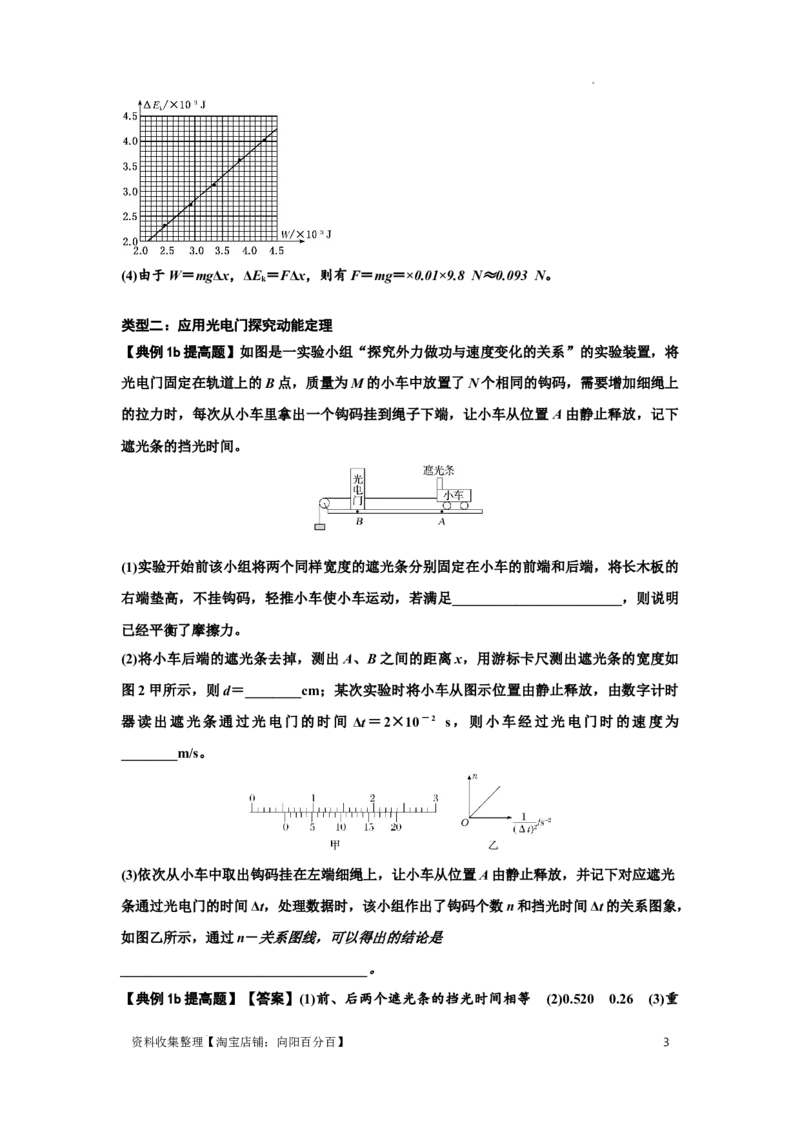
【典例1b提高题】如图是一实验小组“探究外力做功与速度变化的关系”的实验装置,将
光电门固定在轨道上的B点,质量为M的小车中放置了N个相同的钩码,需要增加细绳上
的拉力时,每次从小车里拿出一个钩码挂到绳子下端,让小车从位置 A由静止释放,记下
遮光条的挡光时间。
(1)实验开始前该小组将两个同样宽度的遮光条分别固定在小车的前端和后端,将长木板的
右端垫高,不挂钩码,轻推小车使小车运动,若满足________________________,则说明
已经平衡了摩擦力。
(2)将小车后端的遮光条去掉,测出A、B之间的距离x,用游标卡尺测出遮光条的宽度如
图2甲所示,则d=________cm;某次实验时将小车从图示位置由静止释放,由数字计时
器读出遮光条通过光电门的时间 Δt=2×10-2 s,则小车经过光电门时的速度为
________m/s。
(3)依次从小车中取出钩码挂在左端细绳上,让小车从位置A由静止释放,并记下对应遮光
条通过光电门的时间Δt,处理数据时,该小组作出了钩码个数n和挡光时间Δt的关系图象,
如图乙所示,通过n-关系图线,可以得出的结论是
___________________________________。
【典例1b提高题】【答案】(1)前、后两个遮光条的挡光时间相等 (2)0.520 0.26 (3)重
资料收集整理【淘宝店铺:向阳百分百】 3
学科网(北京)股份有限公司力对钩码所做的功与钩码和小车组成的系统动能增加量成正比
【解析】(1)摩擦力平衡后,不挂钩码,轻推小车使得小车沿长木板运动,则小车将做匀速
运动,两挡光条的挡光时间相等。
(2)遮光条的宽度d=(5+0.05×4)mm=5.20 mm=0.520 cm,小车通过光电门的速度v==
0.26 m/s。
(3)由图可知,钩码个数n与成正比,重力对钩码所做的功为nmgx,系统动能增加量为(M
+nm)·,由此可知:重力对钩码所做的功与钩码和小车组成的系统动能增加量成正比。
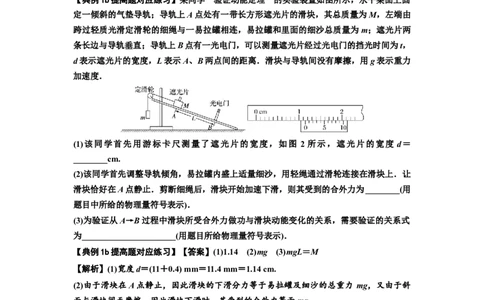
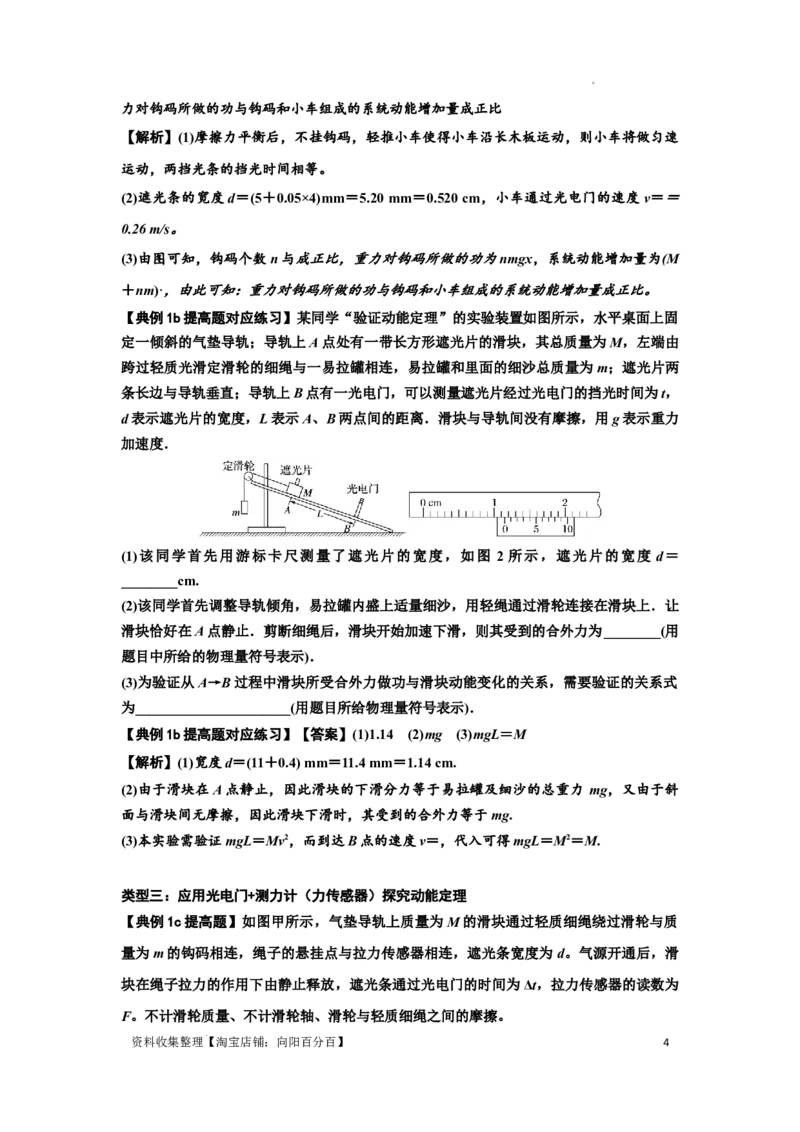
【典例1b提高题对应练习】某同学“验证动能定理”的实验装置如图所示,水平桌面上固
定一倾斜的气垫导轨;导轨上A点处有一带长方形遮光片的滑块,其总质量为M,左端由
跨过轻质光滑定滑轮的细绳与一易拉罐相连,易拉罐和里面的细沙总质量为m;遮光片两
条长边与导轨垂直;导轨上B点有一光电门,可以测量遮光片经过光电门的挡光时间为t,
d表示遮光片的宽度,L表示A、B两点间的距离.滑块与导轨间没有摩擦,用g表示重力
加速度.
(1)该同学首先用游标卡尺测量了遮光片的宽度,如图 2 所示,遮光片的宽度 d=
________cm.
(2)该同学首先调整导轨倾角,易拉罐内盛上适量细沙,用轻绳通过滑轮连接在滑块上.让
滑块恰好在A点静止.剪断细绳后,滑块开始加速下滑,则其受到的合外力为________(用
题目中所给的物理量符号表示).
(3)为验证从A→B过程中滑块所受合外力做功与滑块动能变化的关系,需要验证的关系式
为______________________(用题目所给物理量符号表示).
【典例1b提高题对应练习】【答案】(1)1.14 (2)mg (3)mgL=M
【解析】(1)宽度d=(11+0.4) mm=11.4 mm=1.14 cm.
(2)由于滑块在A点静止,因此滑块的下滑分力等于易拉罐及细沙的总重力 mg,又由于斜
面与滑块间无摩擦,因此滑块下滑时,其受到的合外力等于mg.
(3)本实验需验证mgL=Mv2,而到达B点的速度v=,代入可得mgL=M2=M.
类型三:应用光电门+测力计(力传感器)探究动能定理
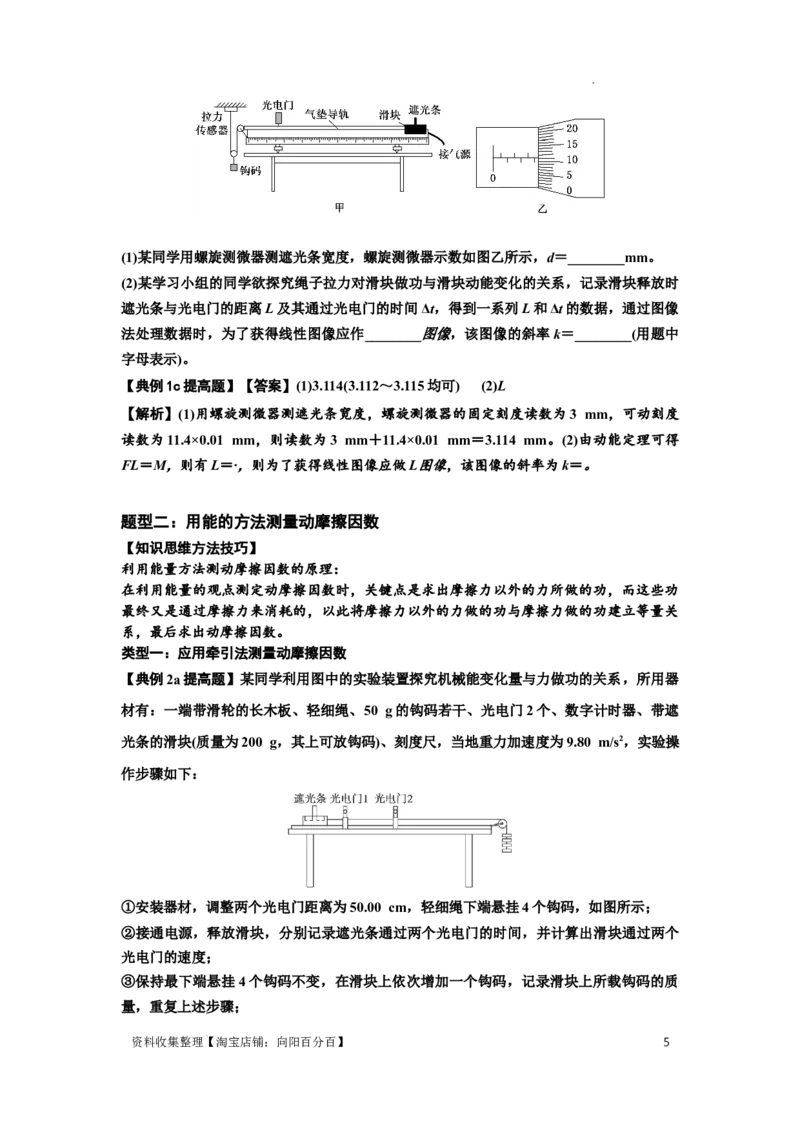
【典例1c提高题】如图甲所示,气垫导轨上质量为M的滑块通过轻质细绳绕过滑轮与质
量为m的钩码相连,绳子的悬挂点与拉力传感器相连,遮光条宽度为 d。气源开通后,滑
块在绳子拉力的作用下由静止释放,遮光条通过光电门的时间为Δt,拉力传感器的读数为
F。不计滑轮质量、不计滑轮轴、滑轮与轻质细绳之间的摩擦。
资料收集整理【淘宝店铺:向阳百分百】 4
学科网(北京)股份有限公司(1)某同学用螺旋测微器测遮光条宽度,螺旋测微器示数如图乙所示,d=________mm。
(2)某学习小组的同学欲探究绳子拉力对滑块做功与滑块动能变化的关系,记录滑块释放时
遮光条与光电门的距离L及其通过光电门的时间Δt,得到一系列L和Δt的数据,通过图像
法处理数据时,为了获得线性图像应作________图像,该图像的斜率k=________(用题中
字母表示)。
【典例1c提高题】【答案】(1)3.114(3.112~3.115均可) (2)L
【解析】(1)用螺旋测微器测遮光条宽度,螺旋测微器的固定刻度读数为3 mm,可动刻度
读数为11.4×0.01 mm,则读数为3 mm+11.4×0.01 mm=3.114 mm。(2)由动能定理可得
FL=M,则有L=·,则为了获得线性图像应做L图像,该图像的斜率为k=。
题型二:用能的方法测量动摩擦因数
【知识思维方法技巧】
利用能量方法测动摩擦因数的原理:
在利用能量的观点测定动摩擦因数时,关键点是求出摩擦力以外的力所做的功,而这些功
最终又是通过摩擦力来消耗的,以此将摩擦力以外的力做的功与摩擦力做的功建立等量关
系,最后求出动摩擦因数。
类型一:应用牵引法测量动摩擦因数
【典例2a提高题】某同学利用图中的实验装置探究机械能变化量与力做功的关系,所用器
材有:一端带滑轮的长木板、轻细绳、50 g的钩码若干、光电门2个、数字计时器、带遮
光条的滑块(质量为200 g,其上可放钩码)、刻度尺,当地重力加速度为9.80 m/s2,实验操
作步骤如下:
①安装器材,调整两个光电门距离为50.00 cm,轻细绳下端悬挂4个钩码,如图所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个
光电门的速度;
③保持最下端悬挂4个钩码不变,在滑块上依次增加一个钩码,记录滑块上所载钩码的质
量,重复上述步骤;
资料收集整理【淘宝店铺:向阳百分百】 5
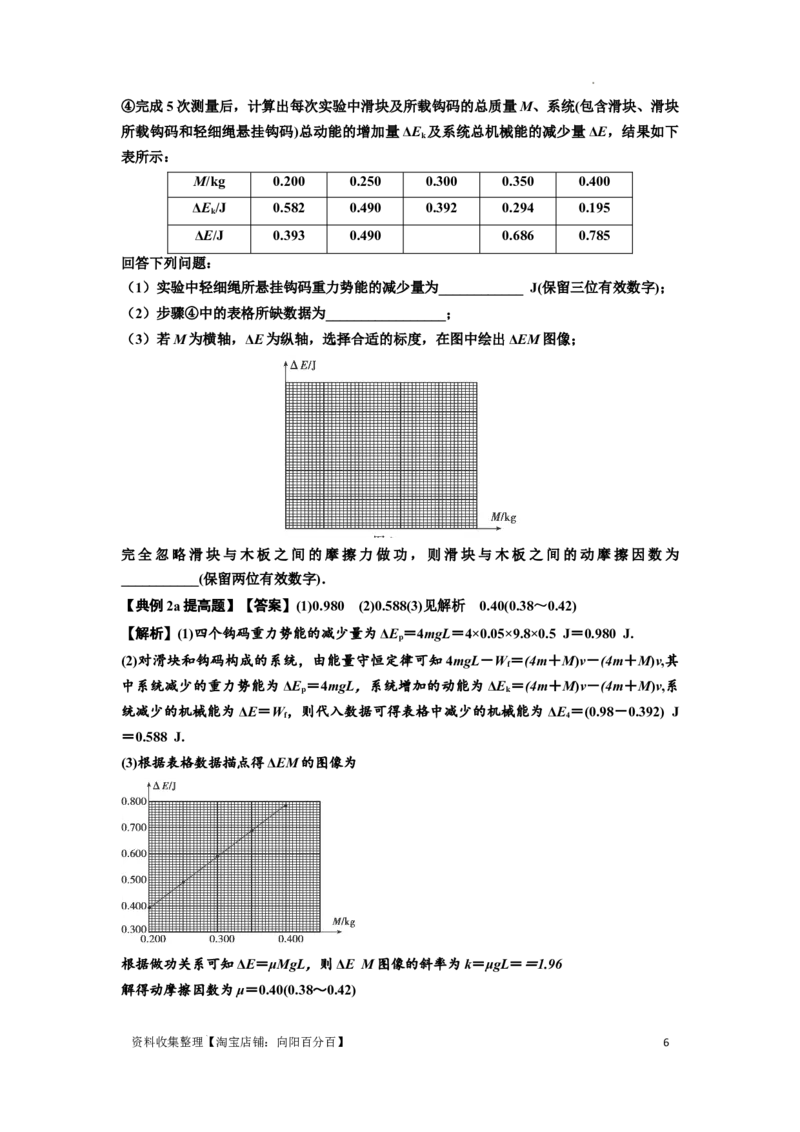
学科网(北京)股份有限公司④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量M、系统(包含滑块、滑块
所载钩码和轻细绳悬挂钩码)总动能的增加量ΔE 及系统总机械能的减少量ΔE,结果如下
k
表所示:
M/kg 0.200 0.250 0.300 0.350 0.400
ΔE /J 0.582 0.490 0.392 0.294 0.195
k
ΔE/J 0.393 0.490 0.686 0.785
回答下列问题:
(1)实验中轻细绳所悬挂钩码重力势能的减少量为____________ J(保留三位有效数字);
(2)步骤④中的表格所缺数据为_________________;
(3)若M为横轴,ΔE为纵轴,选择合适的标度,在图中绘出ΔEM图像;
完全忽略滑块与木板之间的摩擦力做功,则滑块与木板之间的动摩擦因数为
___________(保留两位有效数字).
【典例2a提高题】【答案】(1)0.980 (2)0.588(3)见解析 0.40(0.38~0.42)
【解析】(1)四个钩码重力势能的减少量为ΔE =4mgL=4×0.05×9.8×0.5 J=0.980 J.
p
(2)对滑块和钩码构成的系统,由能量守恒定律可知4mgL-W=(4m+M)v-(4m+M)v,其
f
中系统减少的重力势能为ΔE =4mgL,系统增加的动能为ΔE =(4m+M)v-(4m+M)v,系
p k
统减少的机械能为ΔE=W,则代入数据可得表格中减少的机械能为ΔE =(0.98-0.392) J
f 4
=0.588 J.
(3)根据表格数据描点得ΔEM的图像为
根据做功关系可知ΔE=μMgL,则ΔE M图像的斜率为k=μgL==1.96
解得动摩擦因数为μ=0.40(0.38~0.42)
资料收集整理【淘宝店铺:向阳百分百】 6
学科网(北京)股份有限公司类型二:应用自滑法测量动摩擦因数
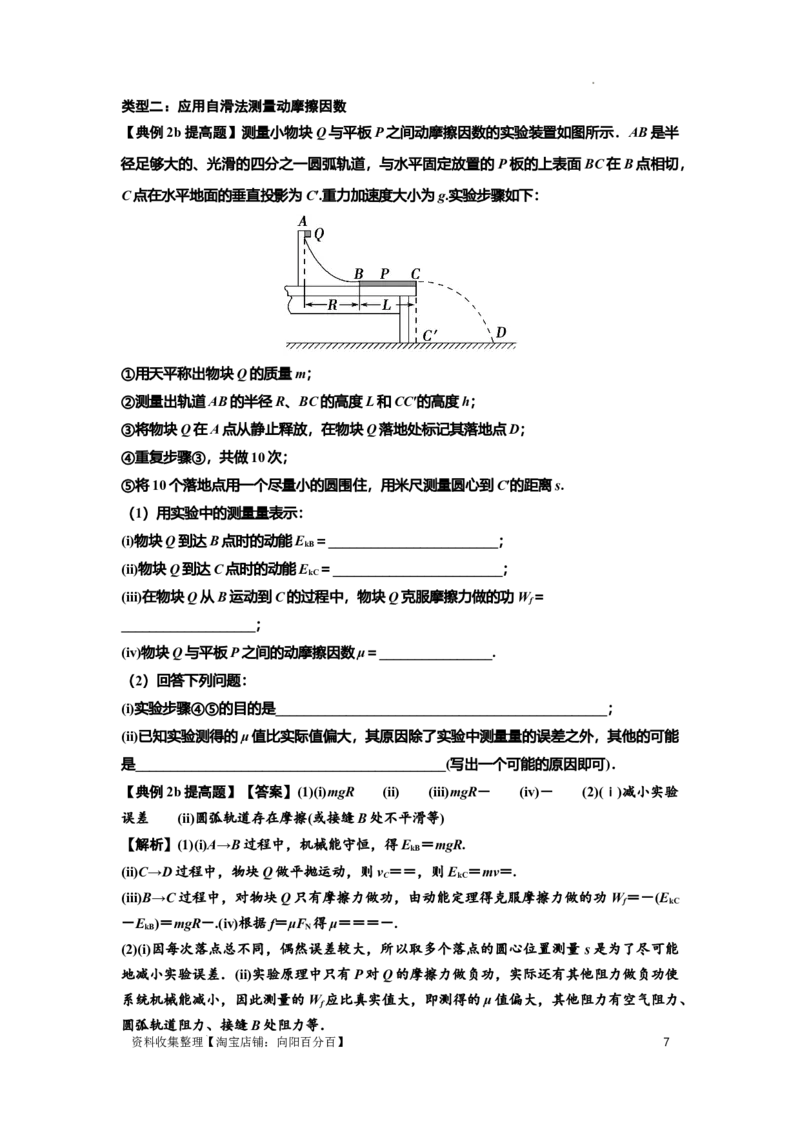
【典例2b提高题】测量小物块Q与平板P之间动摩擦因数的实验装置如图所示.AB是半
径足够大的、光滑的四分之一圆弧轨道,与水平固定放置的P板的上表面BC在B点相切,
C点在水平地面的垂直投影为C′.重力加速度大小为g.实验步骤如下:
①用天平称出物块Q的质量m;
②测量出轨道AB的半径R、BC的高度L和CC′的高度h;
③将物块Q在A点从静止释放,在物块Q落地处标记其落地点D;
④重复步骤③,共做10次;
⑤将10个落地点用一个尽量小的圆围住,用米尺测量圆心到C′的距离s.
(1)用实验中的测量量表示:
(ⅰ)物块Q到达B点时的动能E =________________________;
kB
(ⅱ)物块Q到达C点时的动能E =________________________;
kC
(ⅲ)在物块Q从B运动到C的过程中,物块Q克服摩擦力做的功W=
f
___________________;
(ⅳ)物块Q与平板P之间的动摩擦因数μ=________________.
(2)回答下列问题:
(ⅰ)实验步骤④⑤的目的是_______________________________________________;
(ⅱ)已知实验测得的μ值比实际值偏大,其原因除了实验中测量量的误差之外,其他的可能
是____________________________________________(写出一个可能的原因即可).
【典例2b提高题】【答案】(1)(ⅰ)mgR (ⅱ) (ⅲ)mgR- (ⅳ)- (2)(ⅰ)减小实验
误差 (ⅱ)圆弧轨道存在摩擦(或接缝B处不平滑等)
【解析】(1)(ⅰ)A→B过程中,机械能守恒,得E =mgR.
kB
(ⅱ)C→D过程中,物块Q做平抛运动,则v ==,则E =mv=.
C kC
(ⅲ)B→C过程中,对物块Q只有摩擦力做功,由动能定理得克服摩擦力做的功W=-(E
f kC
-E )=mgR-.(ⅳ)根据f=μF 得μ===-.
kB N
(2)(ⅰ)因每次落点总不同,偶然误差较大,所以取多个落点的圆心位置测量 s是为了尽可能
地减小实验误差.(ⅱ)实验原理中只有P对Q的摩擦力做负功,实际还有其他阻力做负功使
系统机械能减小,因此测量的W 应比真实值大,即测得的μ值偏大,其他阻力有空气阻力、
f
圆弧轨道阻力、接缝B处阻力等.
资料收集整理【淘宝店铺:向阳百分百】 7
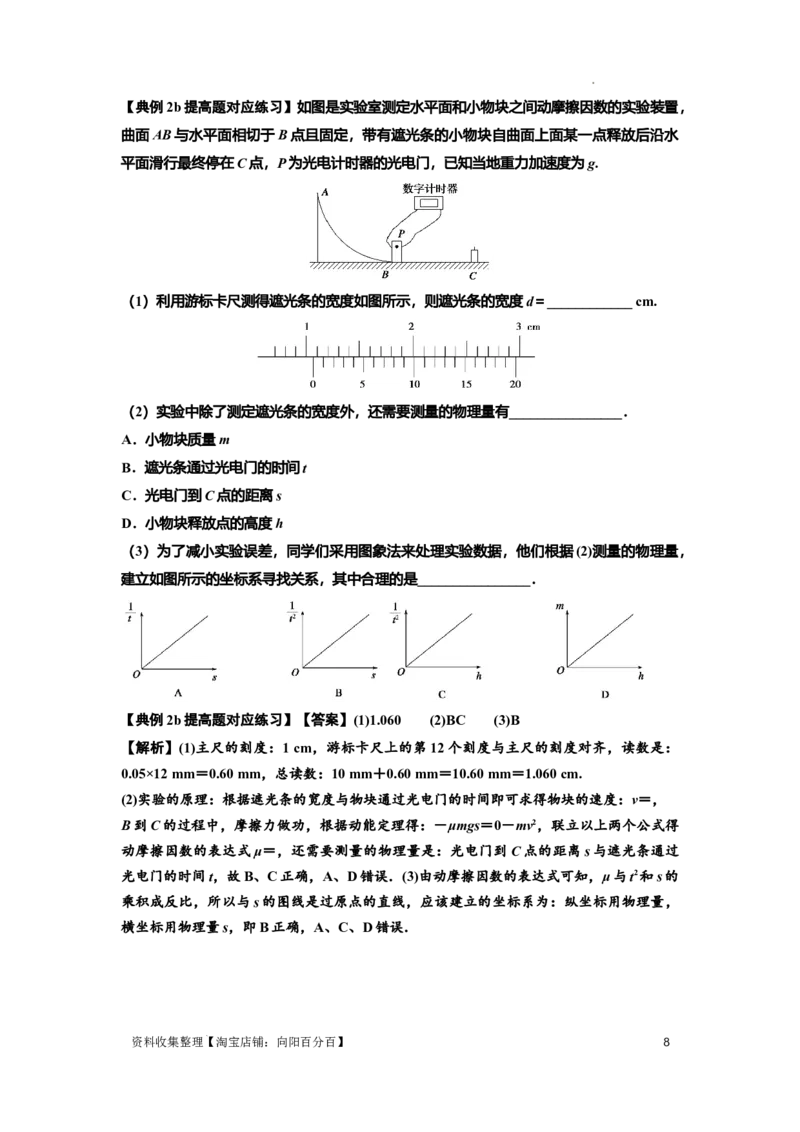
学科网(北京)股份有限公司【典例2b提高题对应练习】如图是实验室测定水平面和小物块之间动摩擦因数的实验装置,
曲面AB与水平面相切于B点且固定,带有遮光条的小物块自曲面上面某一点释放后沿水
平面滑行最终停在C点,P为光电计时器的光电门,已知当地重力加速度为g.
(1)利用游标卡尺测得遮光条的宽度如图所示,则遮光条的宽度d=____________ cm.
(2)实验中除了测定遮光条的宽度外,还需要测量的物理量有________________.
A.小物块质量m
B.遮光条通过光电门的时间t
C.光电门到C点的距离s
D.小物块释放点的高度h
(3)为了减小实验误差,同学们采用图象法来处理实验数据,他们根据(2)测量的物理量,
建立如图所示的坐标系寻找关系,其中合理的是________________.
【典例2b提高题对应练习】【答案】(1)1.060 (2)BC (3)B
【解析】(1)主尺的刻度:1 cm,游标卡尺上的第12个刻度与主尺的刻度对齐,读数是:
0.05×12 mm=0.60 mm,总读数:10 mm+0.60 mm=10.60 mm=1.060 cm.
(2)实验的原理:根据遮光条的宽度与物块通过光电门的时间即可求得物块的速度:v=,
B到C的过程中,摩擦力做功,根据动能定理得:-μmgs=0-mv2,联立以上两个公式得
动摩擦因数的表达式μ=,还需要测量的物理量是:光电门到C点的距离s与遮光条通过
光电门的时间t,故B、C正确,A、D错误.(3)由动摩擦因数的表达式可知,μ与t2和s的
乘积成反比,所以与s的图线是过原点的直线,应该建立的坐标系为:纵坐标用物理量,
横坐标用物理量s,即B正确,A、C、D错误.
资料收集整理【淘宝店铺:向阳百分百】 8
学科网(北京)股份有限公司

