夜雨聆风
夜雨聆风





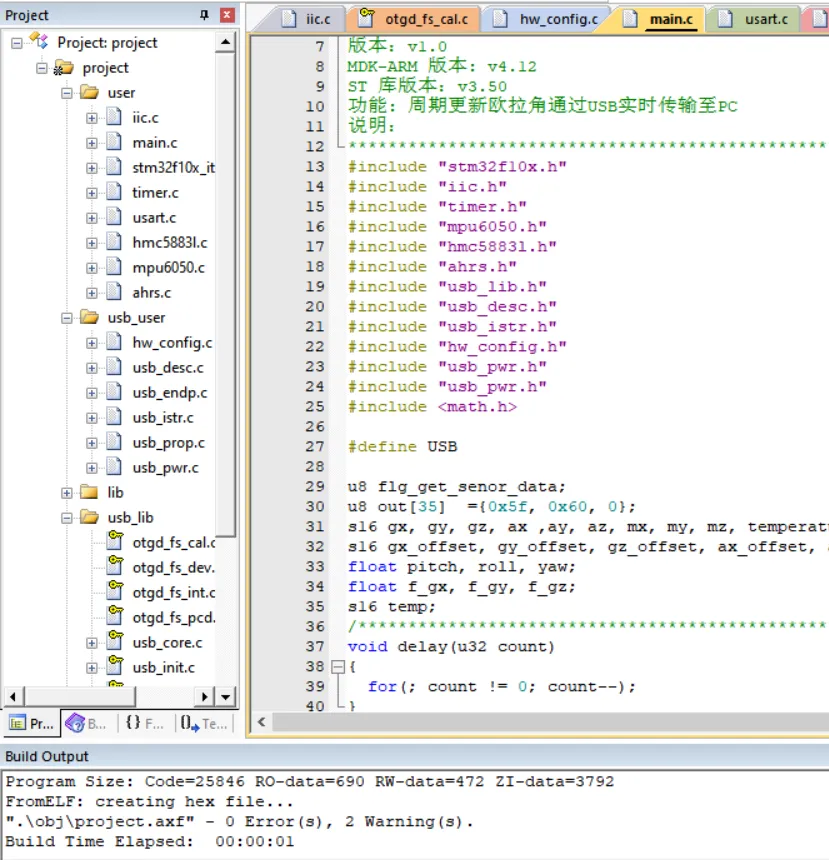
MPU60500开发源码(周期更新欧拉角通过USB实时传输至PC)stm32解析理解并分享
一、系统整体架构与硬件选型
本方案以STM32F103C8T6为核心控制器,通过I2C总线与MPU6050、HMC5883L(磁力计)通信,获取原始传感器数据。利用AHRS(航姿参考系统)算法解算出姿态角(俯仰角pitch、横滚角roll、偏航角yaw),最后通过USB虚拟串口将数据打包发送至PC端。
硬件选型说明:
- STM32F103C8T6
性价比极高的Cortex-M3内核单片机,具备丰富的外设资源,完全满足传感器数据处理和USB通信需求 - MPU6050
集成三轴MEMS加速度计和三轴MEMS陀螺仪,支持I2C通信,测量精度高 - HMC5883L
三轴数字磁力计,用于辅助修正陀螺仪漂移,提升姿态解算稳定性 - USB转串口模块
实现STM32与PC端的高速数据传输
二、核心代码模块化解析
1. 系统初始化模块
系统初始化是整个程序的基础,包括GPIO、I2C、定时器、传感器和USB的初始化配置。

int main(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
u16 j, i, k;
// 使能GPIOA和GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);
// 初始化PA5为推挽输出,用于LED状态指示
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_5); // 点亮蓝色LED
#ifdef USB
usb_system_init(); // USB系统初始化
usart_init(); // 串口初始化(备用方案)
delay(0x80000); // 延时等待外设稳定
iic_init(); // I2C总线初始化
timer_init(); // 定时器初始化,用于传感器数据采集周期控制
mpu6050_init(); // MPU6050传感器初始化
hmc5883l_init(); // HMC5883L磁力计初始化
// …
}//初始化流程说明:
-
首先使能相关外设时钟,这是STM32开发的必要步骤 -
配置GPIO引脚用于状态指示,方便调试 -
根据编译选项选择USB或串口通信方式 -
初始化I2C总线,为传感器通信做准备 -
初始化定时器,用于周期性触发传感器数据采集 -
分别初始化MPU6050和HMC5883L传感器
2. 传感器数据采集与预处理
定时器中断会设置flg_get_senor_data标志位,主循环检测到该标志后开始采集传感器数据,并进行零点偏移校准。

while (1)
{
if(flg_get_senor_data)
{
flg_get_senor_data = 0;
#ifdef USB
// 临时禁用USB中断,避免数据传输冲突
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = DISABLE;
NVIC_Init(&NVIC_InitStructure);
// 从MPU6050获取陀螺仪、加速度计和温度数据
mpu6050_get_data(&gx, &gy, &gz, &ax, &ay, &az, &temperature);
// 从HMC5883L获取磁力计数据
hmc5883l_get_data(&mx, &my ,&mz);
#ifdef USB
// 重新使能USB中断
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 传感器零点偏移校准,消除静态误差
gx -= gx_offset;
gy -= gy_offset;
gz -= gz_offset;
ax -= ax_offset;
ay -= ay_offset;
az -= az_offset;
mx -= mx_offset;
my -= my_offset;
mz -= mz_offset;
// …
}
}//
数据采集注意事项:
在采集数据前临时禁用USB中断,防止数据传输过程中被中断打断,导致数据不完整
传感器零点偏移校准是提升测量精度的关键步骤,建议在系统上电后进行静态校准
原始数据为16位有符号整数,需要根据传感器量程转换为物理量
3. 欧拉角解算与数据打包
将预处理后的传感器数据传入AHRS算法库,解算出欧拉角,并将所有数据打包成固定格式的数据包。

// 将陀螺仪原始数据转换为角速度(°/s)
f_gx = gx * GYRO_SCALE;
f_gy = gy * GYRO_SCALE;
f_gz = gz * GYRO_SCALE;
// 通过AHRS算法解算欧拉角
get_euler_angle(f_gx, f_gy, f_gz, ax, ay, az, mx, my, mz, &pitch, &roll, &yaw);
// 打包传感器原始数据
out[2] = (u8)(gx >> 8);
out[3] = (u8)(gx);
out[4] = (u8)(gy >> 8);
out[5] = (u8)(gy);
out[6] = (u8)(gz >> 8);
out[7] = (u8)(gz);
// … 省略其他数据打包代码
// 打包欧拉角数据(放大100倍转换为整数传输)
temp = (s16)(pitch * 100);
out[20] = (u8)(temp >> 8);
out[21] = (u8)(temp);
temp = (s16)(roll * 100);
out[22] = (u8)(temp >> 8);
out[23] = (u8)(temp);
temp = (s16)(yaw * 100);
out[24] = (u8)(temp >> 8);
out[25] = (u8)(temp);
数据处理说明:
-
陀螺仪原始数据需要乘以比例系数转换为实际角速度 -
AHRS算法融合了陀螺仪、加速度计和磁力计数据,有效解决了单一传感器的漂移问题 -
欧拉角数据放大100倍后以整数形式传输,既保证了精度又简化了通信协议 -
数据包以0x5f和0x60作为帧头,方便PC端识别有效数据
4. USB数据传输与状态指示
为了避免数据传输过于频繁,设置计数器控制传输频率,同时通过LED闪烁指示系统运行状态。

if(k++ > 5)
{
k=0;
#ifdef USB
// 通过USB发送数据包
USART_To_USB_Send_Data(&out[0], 26);
// 备用串口发送方式
for(j = 0; j < 26; j++)
{
USART_SendData(USART1, out[j]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
}
if(i++ >= 50)
{
i = 0;
// LED状态翻转,指示系统正常运行
GPIOA->ODR ^= (1 << 5);
}//
传输策略说明:
-
每采集6次数据发送一次,平衡数据刷新率和系统负载 -
同时提供USB和串口两种传输方式,增强系统兼容性 -
LED周期性闪烁,直观显示系统运行状态,便于调试
三、PC端数据接收与可视化
PC端可以使用串口调试助手或自行开发上位机软件接收数据。数据格式定义如下:
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
上位机软件可以将接收到的欧拉角数据进行可视化展示,例如使用3D模型实时显示姿态变化,方便直观观察物体的运动状态。
四、系统优化与扩展建议
- 传感器校准
可以在程序中加入自动校准功能,上电后自动采集静态数据计算零点偏移 - 滤波算法优化
根据实际应用场景调整AHRS算法参数,或添加卡尔曼滤波等高级滤波算法 - 数据加密
对于需要保密的应用场景,可以在数据传输前进行加密处理 - 低功耗优化
在不需要高刷新率的场景下,降低传感器采样频率和MCU时钟频率 - 扩展传感器
可以进一步添加气压计、GPS等传感器,实现更复杂的应用场景
五、资料