 夜雨聆风
夜雨聆风





AI副驾驶赋能BCI控制
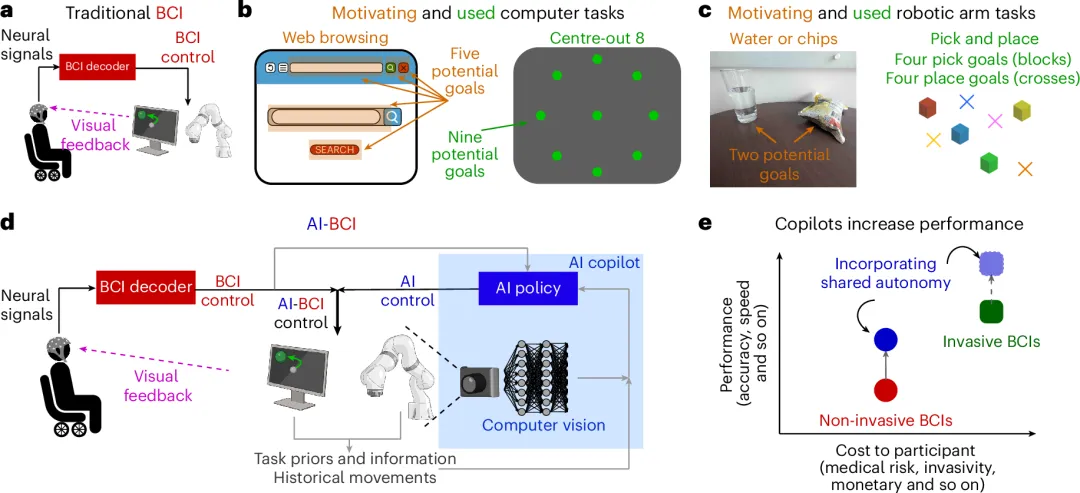
传统脑机接口(BCI)在实际应用中,性能往往需要超过其带来的成本和风险才能具备临床可行性 。基于非侵入式脑电(EEG)的系统更容易受到个体差异和信号非平稳性的影响。近日,加州大学洛杉矶分校(UCLA)的Jonathan C. Kao团队在Nature Machine Intelligence发表研究,引入了“AI副驾驶”(AI Copilot)和共享自主权(Shared Autonomy)的概念 。该框架让AI与BCI用户协作达成任务目标,在非侵入式EEG系统中,使瘫痪受试者的目标命中率提高了3.9倍 ,甚至使其能够完成原本无法独立完成的机械臂抓取与放置任务 。这一研究为提升非侵入式智能神经接口性能提供了突破性的新范式。
传统运动脑机接口(包括计算机光标和机械臂控制)的唯一控制源是解码后的神经信号 。然而,人类执行的许多任务都是以目标为导向的,例如点击屏幕上的搜索栏、按钮,或是抓取桌上的水杯、钥匙等物理对象 。在这些场景下,用户的目标往往是在有限的可能选项中进行权衡 。一旦推断出目标,人类的动作往往是模式化的,因此完全可以通过人工智能(AI)副驾驶来辅助完成 。这种“共享自主权”方法结合了人类用户(飞行员)和AI(副驾驶),利用任务结构、历史运动轨迹以及计算机视觉(CV)等多源信息来推断用户目标,从而大幅提升控制性能 。
基于功能化导电聚合物的设计,研究团队设计了功能化聚苯胺基时序黏附水凝胶贴片。它可以实现心脏的同步机械生理监测和电耦合治疗,并牢固附着在心脏表面监测心脏的机械运动和电活动。
研究团队设计了全新的AI-BCI双层架构。底层是一个混合自适应解码器,结合了卷积神经网络(EEGNet)和类似ReFIT的卡尔曼滤波器(CNN-KF),能够实现在线闭环解码器自适应(CLDA),并有效剥离眼动信号的干扰 。上层则针对不同任务设计了两个AI副驾驶模块:在光标控制任务中,基于近端策略优化(PPO)算法训练了深度强化学习AI模型 ,该模型仅通过观察CNN-KF解码的光标速度和轨迹来推断用户想要到达的9个目标之一 ,并通过类似“电荷引力场”的机制输出辅助速度,按固定比例(解码器权重视为0.6,AI权重视为0.3)与用户控制相融合 ;在机械臂控制任务中,采用基于Grounding DINO的计算机视觉(CV)大模型作为副驾驶 ,实时识别物理目标,并在机械臂靠近目标区域(2.54厘米内)时自动执行精准的抓取或放置操作 。
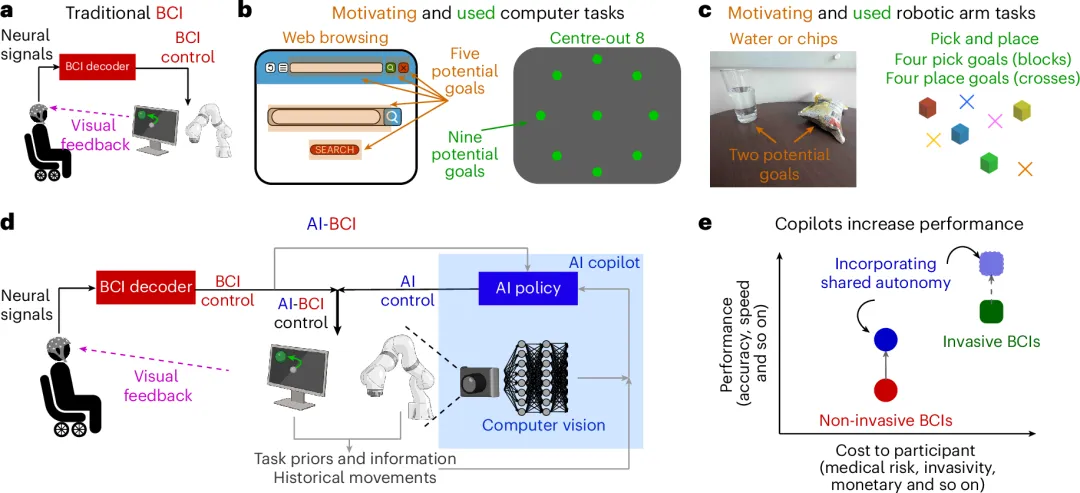
图1 AI Copilot共享控制架构
(图片来自原文)
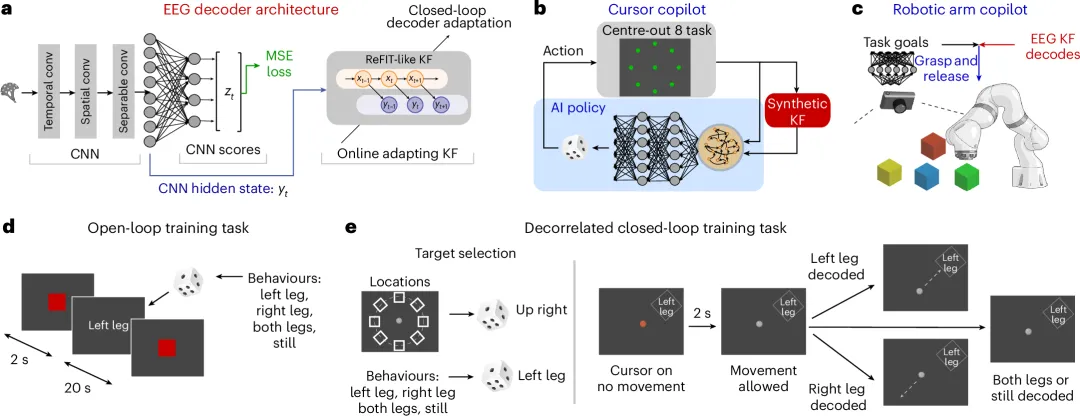
图2 混合自适应解码器与AI副驾驶框架
(图片来自原文)
在二维(2D)光标控制任务(中心向外8目标任务)中(受试者需将光标从中心移动至径向目标区域并停留500ms) ,AI副驾驶(Copilot)辅助显著提高了目标获取的成功率 。对于瘫痪受试者(S2),成功率中位数从无辅助时的约30%大幅提升至有辅助时的接近95% ;健康受试者的成功率也获得了显著提升 。在AI副驾驶的辅助下,瘫痪受试者的目标命中率(Hit rate,即每分钟获取的目标数)提升了3.9倍,健康受试者提升了2.1倍 。更关键的是,在光标接近小目标时,传统BCI难以稳定悬停,而AI副驾驶将瘫痪受试者的微调时间(Dial-in time)中位数从4.15秒骤降至0.05秒 ,表明Copilot在辅助目标获取阶段发挥了至关重要的作用。
论文详细分析了AI副驾驶实现性能提升的核心机制 。研究发现,Copilot之所以能大幅提升控制效率,并不是因为缩短了首次触碰目标的时间(Ballistic control),这部分时间的缩短在统计学上并不显著 。最关键的提升来自于上文提到的微调时间(Fine control)的显著缩短 。此外,AI副驾驶还显著提高了光标轨迹的路径效率(Path efficiency),使光标向目标的移动轨迹更加趋近于直线 。这深刻揭示了AI副驾驶的设计优势:它能够正确推断用户的目标,并在轨迹引导和微调阶段提供有效辅助 。
图3 CNN-KF解码器在多日测试中的稳定性表现
(图片来自原文)
关于系统的长期稳定性与实际可用性,研究评估了CNN-KF解码器在多日(时间跨度为9至36天不等)的跨天性能表现 。所有受试者均能在5个不同的测试日维持对BCI光标的稳定控制
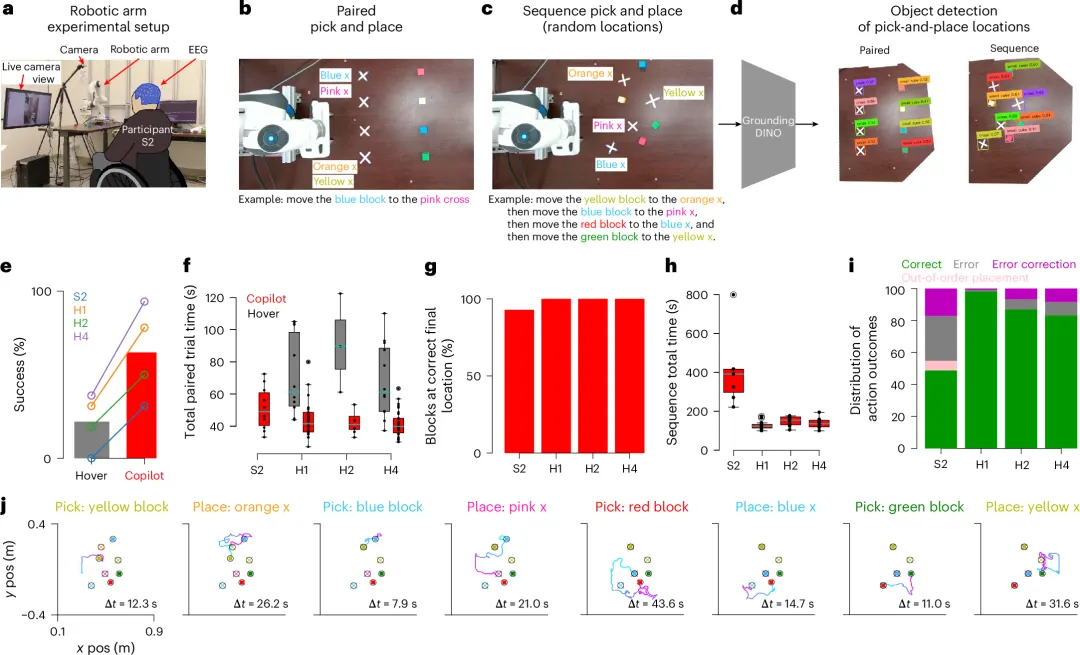
图4 AI副驾驶在机械臂抓取与放置任务中的表现
(图片来自原文)
更重要的是,AI辅助的真正价值在更复杂的物理场景中得到了体现 。在机械臂拾取与放置任务中,如果不使用计算机视觉(CV)AI副驾驶,瘫痪受试者无法完成任何一次成功的试验 。但在AI副驾驶的辅助下,瘫痪受试者不仅能成功拾取物体,还在复杂的“序列随机拾取与放置”任务中以93%的准确率将四个方块按照顺序放置到了最终目标位置 。这证明了AI副驾驶并不会削弱用户的控制能力,反而解锁了瘫痪患者使用非侵入式BCI执行复杂物理任务的可能性。
本研究证明了共享自主权能够显著提升计算机光标和机械臂任务中的脑机接口性能 。AI副驾驶不仅有效降低了执行高维复杂任务所需的神经解码自由度(DOFs) ,也为在解码器优化和神经可塑性适应之外,提供了一条提升BCI性能的补充路径 。研究团队指出,未来的AI副驾驶将更加智能,有望结合大规模数据集训练的高级机器人模型 。同时,未来可通过开发更先进的控制共享策略(如干预式辅助)来更好地平衡人机协作,在提升任务表现的同时确保用户的主动自主性,避免挫败感。
参考文献:
Johannes Y. Lee, et al. “Brain-computer interface control with artificial intelligence copilots.” Nature Machine Intelligence (2025).
END
热忱欢迎广大专家、学者不吝赐稿!
来稿邮箱:rehabil_csbme@sina.cn