 夜雨聆风
夜雨聆风





软件定义的车辆主动机电悬挂架构

主动悬挂和底盘系统正从被动机械部件向软件集成的机电执行器过渡,这些执行器能够实时定义车辆行为。这些技术对于软件定义车辆(SDV)的发展至关重要,电子控制单元(ECU)通过管理物理动力学,提升安全性、乘客舒适度以及各品牌专属的操控特性,覆盖多种动力平台。
主动倾角控制
实现实时动力学车辆稳定性的主要挑战是在高横向加速动作中保持最佳轮胎接触面。在2026年中国车展上,Marelli发布了针对这一问题的主动倾角控制系统技术规格。该系统采用配备集成传感器的电子控制智能执行器,用于监测路面。
该架构采用智能控制单元,每毫秒处理一次传感器遥测数据。通过实时调整车轮的内倾或外倾,系统补偿车身侧倾和路面不平。这种机械调节确保制动和过弯时获得最大抓地力,减少轮胎不均匀磨损,提升整体纵向和横向加速性能。
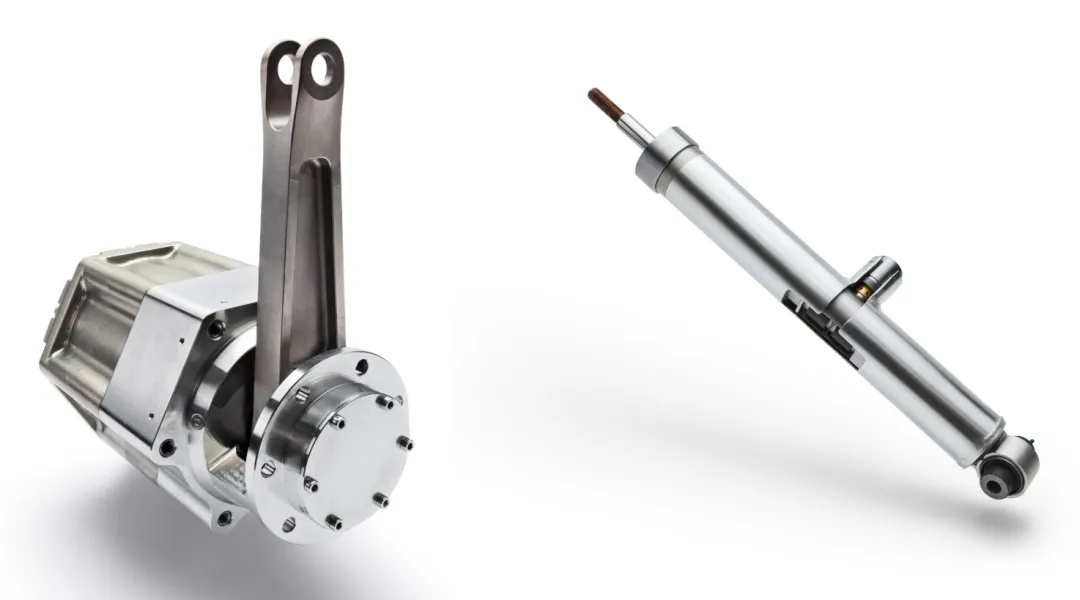
高度调节与空气动力学优化
对于性能级别和运动型多用途车,机电挺杆为可变车身高度提供了模块化解决方案。该无油轻量执行器直接集成于减震器中,无需传统液压系统的复杂性,即可管理车辆水平平衡。
在性能应用中,该装置为车库坡道和减速带等障碍物提供间隙。相反,在SUV应用中,系统在特定速度阈值下调整车辆高度以最小化空气阻力,直接影响数字供应链和车辆系列的能源效率。该设备的机电特性使得能够无缝集成于现有底盘架构,且减轻极小的重量负担。
机电混合全主动悬挂架构
为在性能与成本效益之间取得平衡,Marelli推出了机电混合悬挂。该架构采用前轴全主动机电执行器,以抵消俯仰、滚转和偏航,配合后轴的半主动减震器。该配置允许车辆自行产生反作用力,在动态重量转移时稳定底盘。
全新混合动力机电悬挂设计旨在推动经济实惠的创新,这是一种结合全主动执行器技术和同级最佳半主动减震器的新型悬挂架构,在保持成本效益的同时,提供高端驾驶体验。该系统由电子控制单元控制,集成了全主动机电执行器,应用于前悬挂,提供最佳阻尼或自发反作用力,以最大限度减少滚转、俯仰、偏航和振动。这些减震器搭配半主动后减震器,优化垂直动态响应。结果是驾驶更平稳,稳定性提升,并在多种路况下提升安全性。
该系统借鉴了全主动机电悬挂的经验,采用四个电子控制执行器,实时调节每个车轮的悬挂和阻尼参数,主动定义每辆车悬挂的最佳表现,以实现最佳操控和乘坐舒适度。数据通过毫秒级处理,通过智能算法确定适应道路不平和驾驶情况所需的行动,为车辆乘员提供“魔毯”体验。
通过提升稳定性和舒适性,这两种主动机电悬挂解决方案有助于减少晕动症,尤其是在阅读或使用笔记本电脑等活动时,随着自动驾驶的普及,这些现象预计将变得更加普遍。它们还设计用于回收动能,确保与被动或半主动系统相比高达80%的能效。
自动驾驶和用户体验的影响
随着行业向自动驾驶迈进,减少晕车症成为车舱设计中的关键技术需求。通过利用智能算法中和振动和道路异常——通常称为“魔毯效应”——主动悬挂使乘员能够进行非驾驶任务,如阅读或使用移动设备,同时减少生理不适。
这些创新通过分布式工程模型开发,确保本地化设计和采购符合区域市场的特定法规和消费者标准,如中国日益增长的汽车数据生态系统。将这些机电系统整合进更广泛的车辆软件栈,使OEM主机厂能够在车辆下线后,长时间提供个性化选项和空中(OTA)更新,提升乘坐体验和操控质量。