 夜雨聆风
夜雨聆风





GNSS时间序列多尺度分解与预测软件设计
GNSS时间序列多尺度分解与预测软件设计
周师睿1,2 周 宇1 贺小星1 田先清1 廖 渝1 卢宗衡1
(1.江西理工大学 土木与测绘工程学院,江西 赣州 341000;2.河海大学 地球科学与工程学院,江苏 南京 211100)
[摘要] 针对全球卫星导航系统(GNSS)时间序列数据处理烦琐及多算法对比需求,本研究设计了一款基于矩阵实验室(MATLAB)的GNSS坐标时序预测软件GNSS_pre。该软件集成经验模态分解(EMD)等分解模型和反向传播(BP)神经网络等预测模型,构建时间序列输入、分解、预测和精度评价模块,经标准化计算流程处理数据,且具备数据可视化、存储及模块扩展功能。通过10个 GNSS 台站日时间序列数据实验验证,软件运行稳定可靠,各模型预测精度、鲁棒性、拟合能力较强,其中自适应噪声完备集合经验模态分解 – 极限学习机(CEEMDAN-ELM)模型在均方根误差、平均绝对误差、决定系数以及平均偏差误差四个精度指标下表现最优。其模块化及预留扩展位置设计,为GNSS时间序列预测领域模型灵活组合提供新思路与有力参考。
[关键词]全球卫星导航系统(GNSS);时间序列;分解;预测模型;软件设计
0 引言
全球导航卫星系统(global navigation satellite system,GNSS)广泛应用于交通导航、精准农业[1]、地质灾害和地球物理气候监测[2-3]等领域,在GNSS时间序列数据的处理分析中,通常采用的方法是独立成分分析(independent component analysis,ICA)[4]或主成分分析(principal component analysis,PCA)[5]等,而通过采用针对性的方法来分析,可以更好地理解时间序列数据的结构。为降低时间序列中的噪声影响,研究者开发或改进了各种方法[6-9],这些分解模型在机械的故障分析[10]、地震信号分析[7]等众多领域均有重要应用,为信号分析和特征提取提供了有力工具。机器学习方法为时间序列预测提供了新的视角,将其与海平面数据、气象数据、地壳形变数据等结合进行预测,可提高预测精度和鲁棒性[11-13]。针对时间序列数据处理的复杂流程,文献[14]开发的软件可提高数据处理及分析的效率,但其使用的传统模型精度较低。文献[15]开发的软件使用经验模态分解(empirical mode decomposition,EMD)等三种降噪模型,但无法进行预测。文献[16-17]开发的GNSS时间序列降噪软件利用多次分解与重构降低模态混叠的影响,但其仅分解模型单一,开发的另一款软件GNSS-时间序列(time series,TS)-降噪软件(noise reduction software,NRS)精度高且模型丰富,但其不具备组合模型对比分析的功能。
在以上研究的基础上,本文基于五种信号分解方法与七种预测模型,开发了一款面向GNSS坐标时间序列的深度学习预测软件GNSS_pre。该软件满足用户根据数据特征进行预测的需求,灵活组合不同分解与预测算法,从而实现信号降噪、分量预测、结果重构与精度评估一体化处理。最后本文随机选取北美10个GNSS台站的日时间序列数据进行实验,对GNSS_pre的有效性与实用性进行验证。
1 GNSS_pre的设计与实现
1.1 软件总体设计
GNSS_pre软件总体结构如图1所示,软件主界面如图2所示。该软件基于矩阵实验室(matrix laboratory,MATLAB)强大的矩阵运算、信号分析及图形绘制能力进行开发,借助其软件设计模块的友好交互性,实现了高效的功能设计。软件包括时间序列输入、分解、预测和精度评价模块,各模块包含若干下拉菜单,且具有数据可视化、数据存储等功能。借助模块之间的衔接,开发出一套功能完备、性能可靠、操作便捷的GNSS坐标时间序列预测软件。此外,软件将各算法源代码单独存储,便于后期软件的维护与更新,还为分解、预测和精度评价模块预留了扩展位置,可在后续软件的升级与二次开发中加入任意算法。
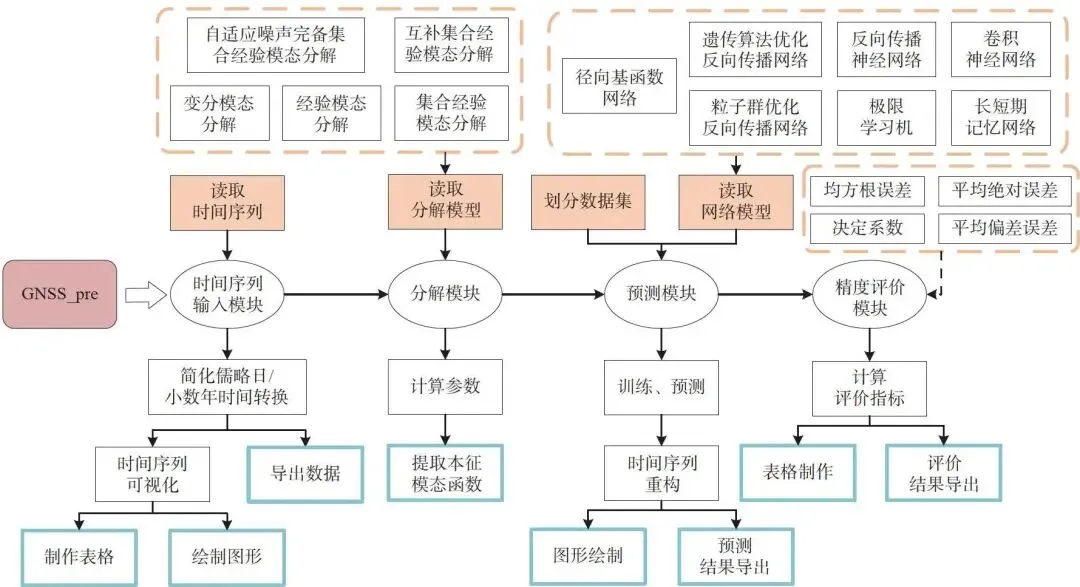
图1 GNSS_pre总体结构图
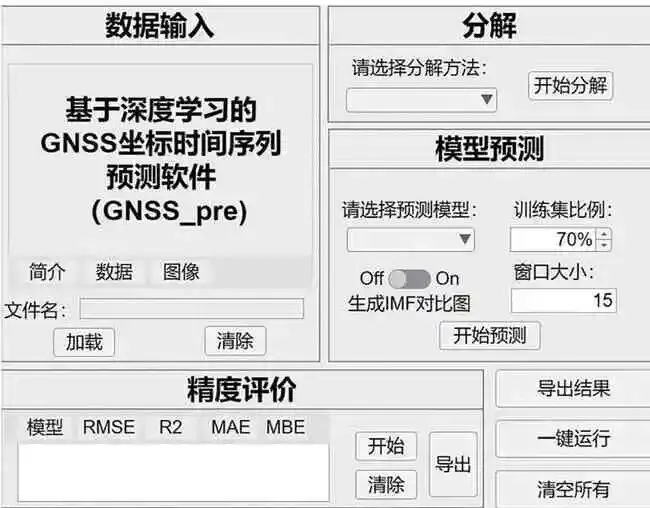
图2 GNSS_pre主界面截图
1.2 输入模块
输入模块主要是将需要处理的原始GNSS坐标时间序列导入程序中,并对该时间序列进行高效整合与预处理。
该模块针对GNSS坐标时间序列的特点,支持xlsx、csv等多种常用数据格式的解析与输入,通过交互式文件选择对话框实现了时间序列的导入,提高了数据批处理的效率。针对时间基准统一的需求,该模块采用国际天文学联合会(International Astronomical Union,IAU)推荐的简化儒略日(modified Julian day,MJD)转换标准,实现MJD与小数年间的精确转换,确保时间序列的常用单位与地球物理研究中的单位兼容。数据可视化子系统采用分层架构设计:表格视图完整呈现时间与GNSS坐标的映射关系,图形视图则通过MATLAB的内置控件实现时序曲线的完整显示,该控件采用滑动时间窗口技术解决长期监测数据密集显示问题。
1.3 分解模块
分解模块负责对预处理后的原始GNSS坐标时间序列进行分解,如图3所示。
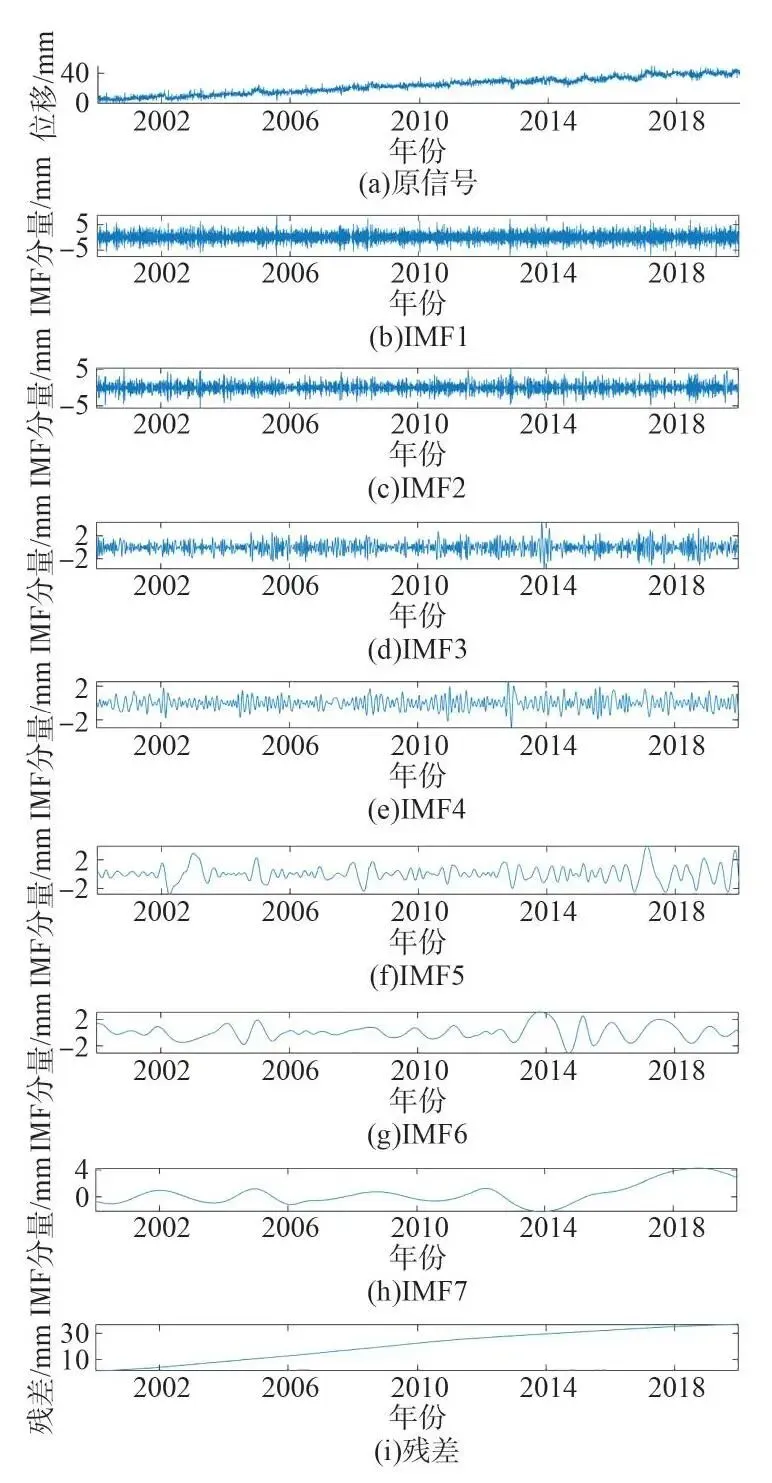
图3 分解模块截图
该模块构建了多模态自适应信号分解框架,根据EMD、集合经验模态分解(ensemble empirical mode decomposition,EEMD)、互补集合经验模态分解(complementary ensemble empirical mode decomposition,CEEMD)、自适应噪声完备集合经验模态分解(complete ensemble empirical mode decomposition with adaptive noise,CEEMDAN)以及变分模态分解(variational mode decomposition,VMD)的原理[18-20],实现了五种核心算法的集成应用。分解完成后,系统自动调用数据可视化功能,同步绘制原始时序曲线、本征模态函数(intrinsic mode function,IMF)分量及残差的时频分布图谱。所有分解结果均存入临时数据库,为后续处理提供完备数据基础。
1.4 预测模块
预测模块构建了基于分量重构的多模型预测结构,可将各IMF分量分别建立模型,研究其未来变化趋势,然后将这些预测结果重构,获得原始时间序列的预测值,预测模块通过这种设计提高预测精度。
根据长短期记忆网络(long short-term memory,LSTM) [21-23]、粒子群优化反向传播网络(particle swarm optimization-back propagation,PSO-BP)[24]等反向传播(back propagation,BP)神经网络系列改进算法,极限学习机(extreme learning machine,ELM)、卷积神经网络(convolutional neural network,CNN)[25]、径向基函数网络(radial basis function network,RBF)[26]的预测原理,本文模块设计了七类预测模型。用户可自由设定训练集比例与时序窗口大小。预测结果可视化功能可以叠加显示原始序列与重构预测序列的全局对比曲线,如图4所示。此外,用户可通过开关隐藏/显示各IMF分量的预测前后对比图像,帮助分析异常模态的预测误差。
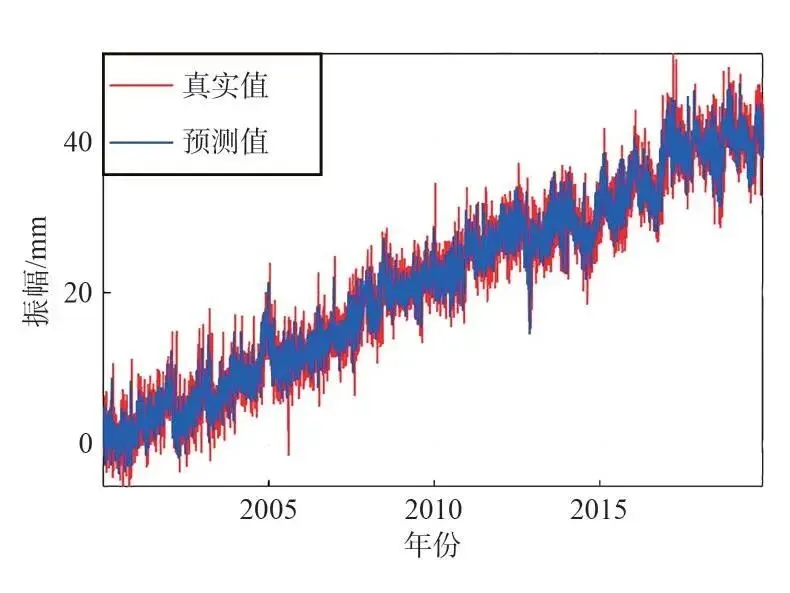
图4 ELM预测结果与原数据对比
1.5 精度评价模块
在精度评价模块设计中,对所有预测模型分别计算均方根误差(root mean square error,RMSE)ERMS、平均绝对误差(mean absolute error,MAE)EMA、平均偏差误差(mean bias error,MBE)EMB以及决定系数(r-square) R2四项核心指标[27-28],如图5所示。可视化界面采用表格布局,行名显示各预测模型名称,同时对应展开四项指标数值。数据导出功能支持将评估结果完整转换为表格形式,文件命名可自定义。
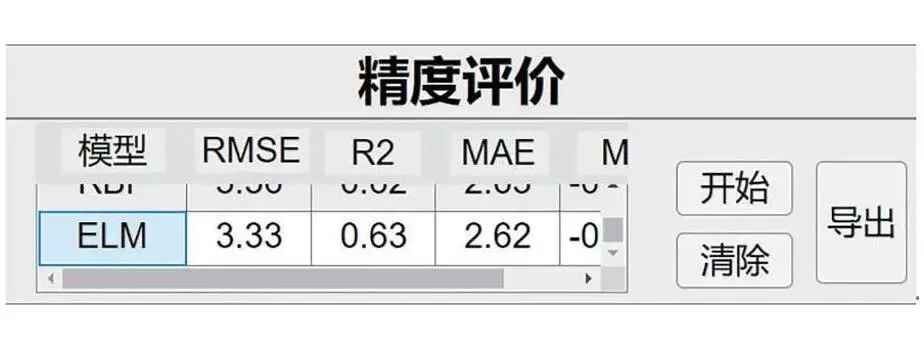
图5 精度评价模块截图
2 基于GNSS_pre的GNSS高程时间序列预测
2.1 研究区域及数据来源
本研究借助增强型固体地球科学数据记录系统(enhanced solid earth science data record system,ES3),选取10个GNSS台站日时间序列数据开展实验,站点具体信息如表1所示,其中站点时间跨度均为2000—2020年。
表1 GNSS站信息表
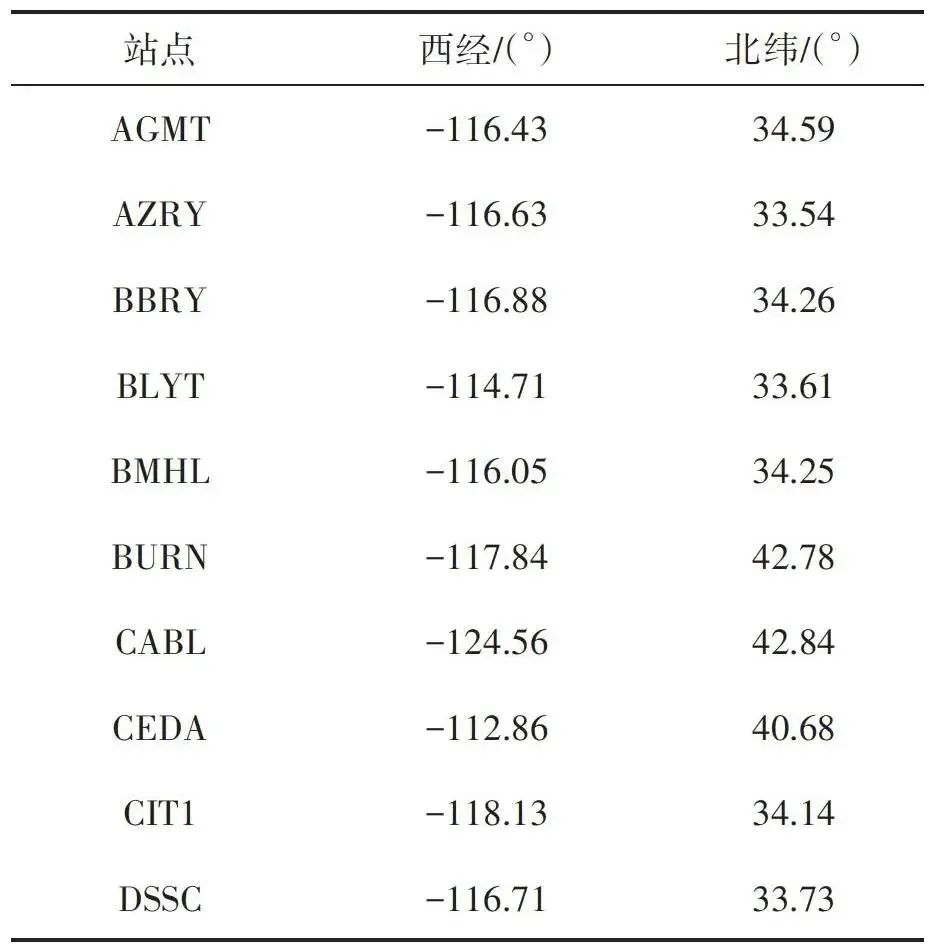
这些站点位于西经112°—124°,北纬33°—42°,属于太平洋沿岸平原,靠近圣安德烈斯断裂带,是北美板块和太平洋板块的交界处,地质构造复杂,地震活动频繁。
2.2 预测结果分析
对这些GNSS站高程时间序列依次进行EMD、EEMD、CEEMD、CEEMDAN、VMD分解,得到对应的IMF组,GNSS高程时间序列经过不同的分解方式,得到多个IMF和一个残差。
GNSS_pre的一项主要功能即为实现各组合模型的对比分析,为体现这一功能,在实验中控制了预测模型的数据集划分和窗口大小。数据集中训练集划分为70%,用于模型学习和参数优化。模型通过学习训练集中的数据趋势和特征,调整内部参数以最小化预测误差。其余为测试集,用于评估模型性能。测试集的特点是与训练集完全独立,用于验证模型在未见过的数据上的表现。通过在测试集上评估模型的误差指标(ERMS、EMA、EMB和R2),可以判断模型是否具有良好的泛化能力,并避免过拟合问题。窗口大小表示模型预测过程中参考的历史数据长度,为捕捉时间序列的长期趋势并防止过拟合,设置窗口大小为15。
为了对比分析各组合模型在GNSS高程时间序列分析中的作用,本次实验使用了分解后对各IMF和残差分别预测的方法,并对各预测结果重构得到最终预测结果,由于篇幅限制,在文中展示CIT1的预测结果,各组合模型的预测效果以VMD-BP模型的结果为代表,如图6所示,各组合模型的对比预测效果如图7所示。
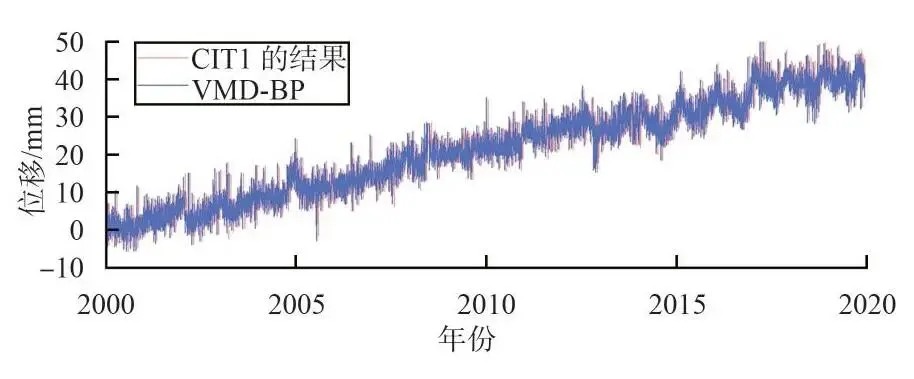
图6 CIT1时间序列的VMD-BP模型预测结果
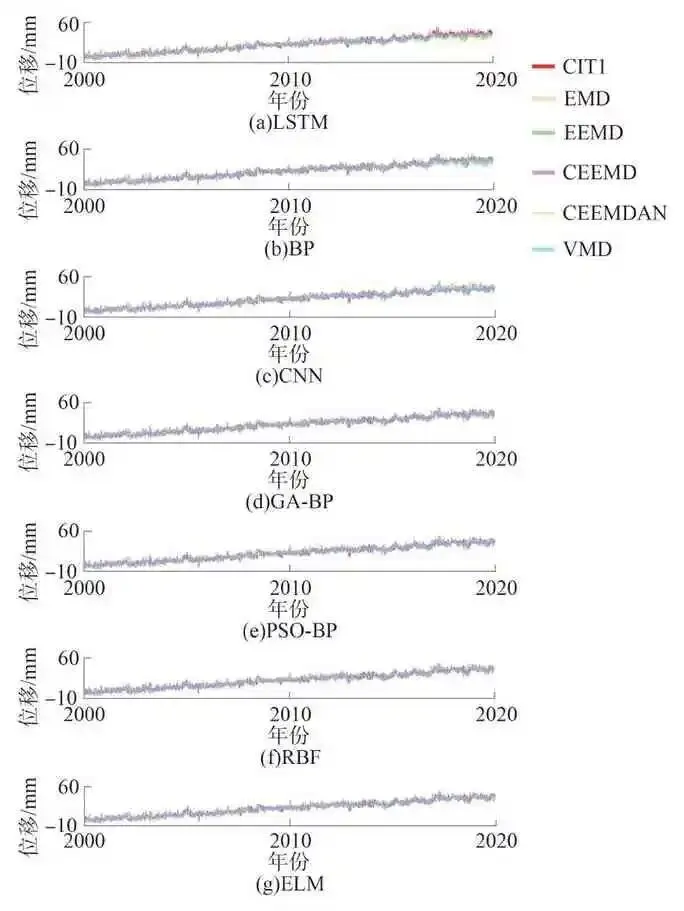
图7 CIT1站点GNSS高程时间序列预测结果
通过对35种组合模型的实验结果进行分析可发现,不同模型在GNSS高程时间序列预测中的表现存在显著差异。EEMD-LSTM模型在LSTM系列组合模型中表现最优,但这系列组合模型在数据突变时误差较大。BP、遗传算法优化反 向 传 播 网 络(genetic algorithm-back propagation,GA-BP)和PSO-BP等模型虽然在简单数据上表现较好,但相比之下,在处理复杂的GNSS高程时间序列时,预测精度较低。ELM模型和RBF模型运行速度快、预测精度和鲁棒性较高。CNN模型在特征提取上有优势,但单独使用时不能很好地分析时间序列的长期趋势。
基于GNSS_pre中的精度评价模块,本实验使用ERMS、R2、EMA和EMB作为评价指标来组合评估模型误差。在文中对该10个站点的4个精度指标进行分析,如表2所示。表2统计了各组合模型下的预测误差平均值,四个精度评定指标中,除R2以取值区间为[0,1]的比例形式表现外,其余三个指标均以与原始数据相同的单位衡量误差,单位的统一可以使得其结果更清晰明了。
表2 各组合模型下的预测误差平均统计
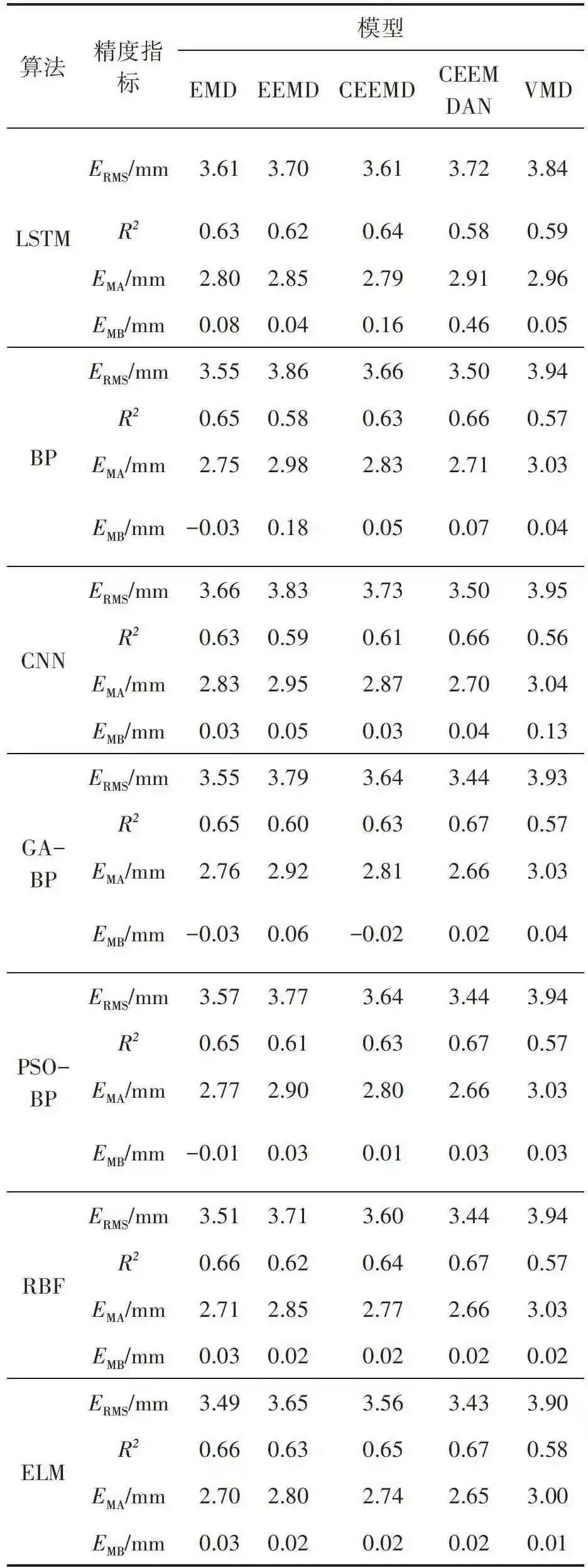
各组合模型的ERMS与EMA表示存在一定的误差,R2均大于0.5,并EMB值均趋于0,表明这些模型有较强拟合能力,且预测值与观测值之间没有显著的系统偏差。对各模型的ERMS和EMA进行分析可知,各组合模型的误差值较为接近,在误差最小的CEEMDAN-ELM模型与最大的VMD-LSTM模型间,ERMS值仅相差0.41 mm,EMA值更为接近,相差0.31 mm。从模型的拟合能力上看,各模型的性能在同一层次。根据表格数据,各模型的系统性偏差普遍较小,大部分模型的EMB绝对值小于0.1,其绝对值的最大值模型为CEEMMDAN-LSTM,表明模型的预测结果与实际观测值之间没有显著的系统偏差。综上所述,对于这10个GNSS站点的高程时间序列,各组合模型均能较好地预测分析,CEEMDAN-ELM的误差最小、拟合能力最强,且系统性偏差小,在四个精度指标下均表现出色,在处理这10个GNSS站点的高程时间序列数据上,是最合适的选择。同时,在模型的组合上,可以发现,分解模型与预测模型也有最优或更优的搭配,如在使用LSTM预测模型时,从预测精度与拟合能力上看,更推荐与EEMD、EMD模型组合使用,而不应与CEEMDAN组合。
3 结束语
在GNSS时间序列预测研究中,为应对噪声干扰并支持多算法比较,本文开发了基于深度学习的预测软件GNSS_pre。该软件集成多种信号分解与预测模型,用户可依据数据特点自由组合使用,有效克服了传统单一算法的局限性。10个GNSS台站日时间序列数据的实验验证表明,GNSS_pre在功能完整性、处理效率及模型扩展性方面表现良好。实验结果显示,不同分解与预测模型存在适配性差异,CEEMDAN-ELM组合模型在本次实验中表现最为优异。本研究为GNSS时间序列的分析与预测提供了一款兼具可扩展性、高效率与高度灵活性的软件工具,能够有效支持多模型组合与大规模数据处理,提升GNSS数据挖掘与预测应用的精度与自动化水平。
参考文献
[1] MACHLEB J,PETEINATOS G G,KOLLENDA B L,et al.Sensor-based mechanical weed control: present state and prospects[J].Computers and Electronics in Agriculture,2020(176):105638.
[2] OHTA Y,KOBAYASHI T,TSUSHIMA H,et al.Quasi realtime fault model estimation for near-field tsunami forecasting based on RTK-GPS analysis: application to the 2011 Tohoku-Oki earthquake (Mw 9.0)[J].Journal of Geophysical Research:Solid Earth,2012,117(B2):B02311.
[3] STEINER A K,LACKNER B C,LADSTÄDTER F,et al.GPS radio occultation for climate monitoring and change detection[J].Radio Science,2011,46(6):1-17.
[4] LV H,HE X,HU S.Investigating surface loading effect on seasonal crustal deformation observed by GNSS in Hong Kong[J].Scientific Reports,2025,15(1):2742.
[5] HE X,HUA X,YU K,et al.Accuracy enhancement of GPS time series using principal component analysis and block spatial filtering[J].Advances in Space Research,2015,55(5):1316-1327.
[6] HUANG J,HE X,HU S,et al.Impact of offsets on GNSS time series stochastic noise properties and velocity estimation[J].Advances in Space Research,2025,75(4):3397-3413.
[7] MANIKANDAN R,MUTRA R R.Fault classification in rotorbearing system using advanced signal processing and machine learning techniques[J].Results in Engineering,2025(25):103892.
[8] PETCULESCU I,HYNDS P,BROWN R S,et al.An investigation of microbial groundwater contamination seasonality and extreme weather event interruptions using “big data”,timeseries analyses,and unsupervised machine learning[J].Environmental Pollution,2025(368):125790.
[9] 蒋磊,孙蕊,刘正午,等.基于 GA-BP 的中欧 GNSS 电离层误差建模与精度分析[J].北京航空航天大学学报,2022,49(6):1533-1542.
[10] SU K,JIN S,HOQUE M M.Evaluation of ionospheric delay effects on multi-GNSS positioning performance[J].Remote Sensing,2019,11(2):171.
[11] GAO W,LI Z,CHEN Q,et al.Modelling and prediction of GNSS time series using GBDT,LSTM and SVM machine learning approaches[J].Journal of Geodesy,2022,96(10):71.
[12] NIEVES V,RADIN C,CAMPS-VALLS G.Predicting regional coastal sea level changes with machine learning[J].Scientific Reports,2021,11(1):7650.
[13] 陈红康,鲁铁定,孙喜文,等.一种改进的VMD-XGBoost验潮站月海面高序列预测模型[J].海洋测绘,2023(5):17-21.
[14] 舒颖,花向红,贺小星,等.GPS 时间序列数据处理与分析软件的设计及实现[J].测绘地理信息,2017,42(5):29-32.
[15] 熊常亮,贺小星,孙喜文,等.GNSS 时间序列分析与降噪软件的实现[J].导航定位学报,2021,9(5):152-162.
[16] 贺小星,熊常亮,常苗,等.基于 EMD 的 GNSS 时间序列降噪软件实现[J].导航定位学报,2020,8(1):32-37.
[17] HE X,YU K,MONTILLET J P,et al.GNSS-TS-NRS: an Open-source MATLAB-Based GNSS time series noise reduction software[J].Remote Sensing,2020,12(21):3532.
[18] 张双成,李振宇,何月帆,等.GNSS 高程时间序列周期项的经验模态分解提取[J].测绘科学,2018,43(8):80-84.
[19] REN Y,SUGANTHAN P N,SRIKANTH N.A comparative study of empirical mode decomposition-based short-term wind speed forecasting methods[J].IEEE Transactions on Sustainable Energy,2014,6(1):236-244.
[20] ZHOU Y,HE X,MONTILLET J P,et al.An improved ICEEMDAN-MPA-GRU model for GNSS height time series prediction with weighted quality evaluation index[J].GPS Solutions,2025,29(3):1-19.
[21] ZHOU Y,HE X,WANG S,et al.Hybrid GNSS time-series prediction method based on ensemble empirical mode decomposition with long short-term memory[J].Discover Applied Sciences,2025,7(1):61.
[22] CHEN H,LU T,HUANG J,et al.An improved VMD-LSTM model for time-varying GNSS time series prediction with temporally correlated noise[J].Remote Sensing,2023,15(14):3694.
[23] WANG J,LI Z,FAN W,et al.A new ensemble learning method based on signal source driver for GNSS coordinate time series prediction[J].GPS Solutions,2025,29(2):68.
[24] WU X,YANG Y,LI K,et al.Performance prediction of gasification-integrated solid oxide fuel cell and gas turbine cogeneration system based on PSO-BP neural network[J].Renewable Energy,2024(237):121711.
[25] LU C,WANG Z,WU Z,et al.Global ocean wind speed retrieval from GNSS reflectometry using CNN-LSTM network[J].IEEE Transactions on Geoscience and Remote Sensing,2023(61):1-12.
[26] LI S,JIANG N,XU T,et al.A precipitation forecast model with a neural network and improved GPT3 model for Japan[J].Gps solutions,2023,27(4):186.
[27] CHAI T,DRAXLER R R.Root mean square error (RMSE) or mean absolute error (MAE):arguments against avoiding RMSE in the literature[J].Geoscientific model development,2014,7(3):1247-1250.
[28] WILLMOTT C J,MATSUURA K.Advantages of the mean absolute error (MAE) over the root mean square error(RMSE) in assessing average model performance[J].Climate Research,2005,30(1):79-82.
Multi-scale decomposition and prediction software design for GNSS time series
ZHOU Shirui1,2,ZHOU Yu1,HE Xiaoxing1,TIAN Xianqing1,LIAO Yu1,LU Zongheng1
(1.School of Civil Engineering and Surveying and Mapping Engineering,Jiangxi University of Science and Technology,Ganzhou,Jiangxi 341000,China;2.School of Earth Sciences and Engineering,Hohai University,Nanjing,Jiangsu 211100,China)
Abstract:To address the cumbersome processing of global navigation satellite system (GNSS) time series data and the need for comparative analysis among multiple algorithms,a GNSS coordinate time series prediction software called GNSS_pre was designed,based on matrix laboratory (MATLAB). This software integrates decomposition models such as empirical mode decomposition (EMD) and prediction models including backpropagation (BP) neural networks. It constructs modules for time series input,decomposition,prediction,and accuracy evaluation,processing data through a standardized computational workflow while offering data visualization,storage,and module expansion capabilities. Validation experiments using daily time series data from ten GNSS stations demonstrate that the software operates stably and reliably,with strong prediction accuracy,robustness,and fitting ability across various models. Specifically,the complete ensemble empirical mode decomposition with adaptive noise–extreme learning machine (CEEMDAN-ELM) model outperforms in four accuracy metrics: root mean square error,mean absolute error,coefficient of determination,and mean bias error. The software’s modular design and reserved expansion slots provide new ideas and valuable references for flexible combinations of models in the field of GNSS time series prediction.
Keywords:global navigation satellite system (GNSS); time series; decomposition; prediction model; software design
引文格式:周师睿,周宇,贺小星,等. GNSS时间序列多尺度分解与预测软件设计[J].北京测绘,2026,40(5):587-593.Referenceformat: ZHOU Shirui,ZHOU Yu,HE Xiaoxing,et al. Multi-scale decomposition and prediction software design for GNSS time series[J]. Beijing Surveying and Mapping,2026,40(5):587-593.
DOI: 10.19580/j. cnki.1007-3000.2025060028
[中图分类号] P228
[文献标识码] A
[文章编号] 1007-3000(2026)05-0587-07
[收稿日期] 2025-06-13
[基金项目]国家级大学生创新创业项目(202410407026)
[作者简介] 周师睿(2003—),男,江苏泰州人,大学本科,研究方向为GNSS坐标时间序列处理。E–mail: 18136933698@163.com
[通信作者]贺小星,E-mail:xxh@jxust.edu.cn