

文档内容
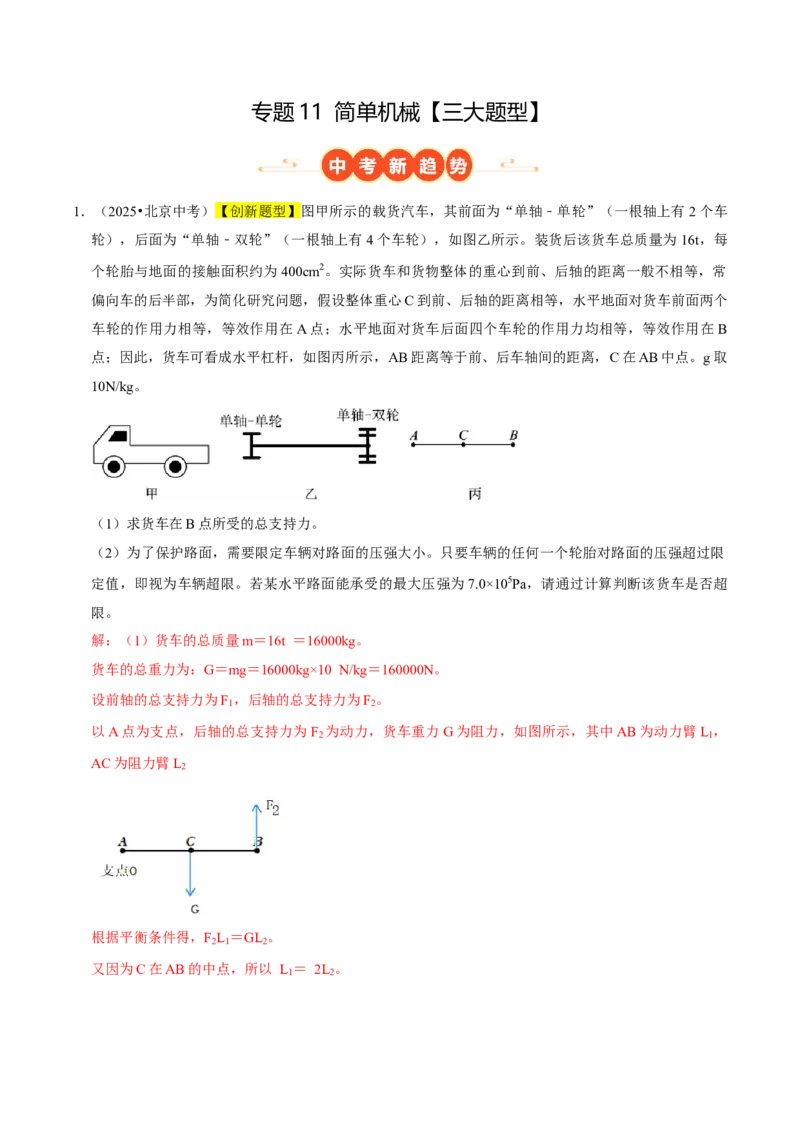
专题 11 简单机械【三大题型】
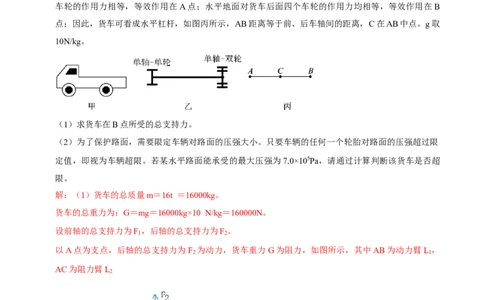
1.(2025•北京中考)【创新题型】图甲所示的载货汽车,其前面为“单轴﹣单轮”(一根轴上有2个车
轮),后面为“单轴﹣双轮”(一根轴上有 4个车轮),如图乙所示。装货后该货车总质量为 16t,每
个轮胎与地面的接触面积约为400cm2。实际货车和货物整体的重心到前、后轴的距离一般不相等,常
偏向车的后半部,为简化研究问题,假设整体重心C到前、后轴的距离相等,水平地面对货车前面两个
车轮的作用力相等,等效作用在A点;水平地面对货车后面四个车轮的作用力均相等,等效作用在 B
点;因此,货车可看成水平杠杆,如图丙所示,AB距离等于前、后车轴间的距离,C在AB中点。g取
10N/kg。
(1)求货车在B点所受的总支持力。
(2)为了保护路面,需要限定车辆对路面的压强大小。只要车辆的任何一个轮胎对路面的压强超过限
定值,即视为车辆超限。若某水平路面能承受的最大压强为7.0×105Pa,请通过计算判断该货车是否超
限。
解:(1)货车的总质量m=16t =16000kg。
货车的总重力为:G=mg=16000kg×10 N/kg=160000N。
设前轴的总支持力为F ,后轴的总支持力为F 。
1 2
以A点为支点,后轴的总支持力为F 为动力,货车重力G为阻力,如图所示,其中AB为动力臂L ,
2 1
AC为阻力臂L
2
根据平衡条件得,F L =GL 。
2 1 2
又因为C在AB的中点,所以 L = 2L 。
1 2因此,F = G = =80000 N。
1
B点的总支持力:F =80000 N。A点总支持力为F =G﹣F =160000N﹣80000 N=80000 N。
2 1 2
(2)每个轮胎与地面的接触面积S=400 cm2=400×10−4 m2=0.04 m2。
前轴2 个轮子,每个轮子对地压力F前 = F
1
== ×80000 N=4000N。
故单个轮胎的压强:p前 = =1.0×106 Pa。
前轴单个轮胎的压强 1.0×106 Pa>7.0×105 Pa。因此,货车的前轴轮胎对路面的压强超过了限定值,该
货车超限。
答:(1)货车在B点所受的总支持力为 80000 N。(2)该货车超限,因为前轴轮胎对路面的压强超
过了7.0×105Pa。
2.(2025•北京中考)如图所示,园艺工人在修剪枝条。关于园艺剪的使用,下列说法正确的是( )
A.园艺剪对枝条的压力是阻力
B.在图示状态使用时园艺剪是费力杠杆
C.把枝条往园艺剪的轴处靠近是为了省力
D.把枝条往园艺剪的轴处靠近是为了增大阻力臂
解:
A、枝条对园艺剪的压力是阻力,故A错误;
B、由题图可知,修枝剪的支点在转轴处,手对修枝剪的作用力为动力,树枝对修枝剪的作用力为阻
力,动力臂大于阻力臂,故修枝剪为省力杠杆,故B错误;
CD、把枝条往园艺剪的轴处靠近,是为了减小阻力臂,在阻力和动力臂大小不变时,根据杠杆平衡条
件可知,动力减小,可以更省力,故C正确,D错误。
答案:C。
(多选)3.(2025•北京中考)如图所示,重600N的工人通过滑轮组用竖直向下的拉力匀速提升货物,表中是他某次工作的相关数据。若三个滑轮重均相等,不计滑轮组的绳重和摩擦,下列说法正确的是(
)
货物所受重力G/N 货物被提升高度h/m 绳端所受拉力F/N 所用时间t/s
540 3 200 25
A.工人做功的功率为72W
B.滑轮组对悬挂点A的拉力为920N
C.滑轮组的机械效率为90%
D.若货物离开水平地面之前,工人用100N的力竖直向下拉绳端,则地面对货物的支持力为200N
解:
A、工人做功的功率 ,故A正确;
B、G动 =3F拉 ﹣G=3×200N﹣540N=60N;
滑轮组对悬挂点A的拉力F=4F拉+2G动 =4×200N+2×60N=920N,故B正确;
C、滑轮组的机械效率 ×100%=90%,故C正确;
D、若货物离开水平地面之前,工人用100N的力竖直向下拉绳端,则地面对货物的支持力
F支 =G+G动 ﹣3F拉 ′=540N+60N﹣3×100N=300N,故D错误。
答案:ABC。
4.(2024•北京中考)如图所示,园艺工人在修剪枝条时,常把枝条尽量往剪刀的轴处靠近,这样做是为
了( )
A.增大动力臂,能够省力B.增大阻力臂,方便使用
C.减小动力臂,方便使用
D.减小阻力臂,能够省力
解:在同样的情况下,把枝条往剪刀轴靠近,减小了阻力臂,而阻力和动力臂不变,由 F L =F L 可
1 1 2 2
知,动力会变小,因此可以省力,故ABC错误,D正确。
答案:D。
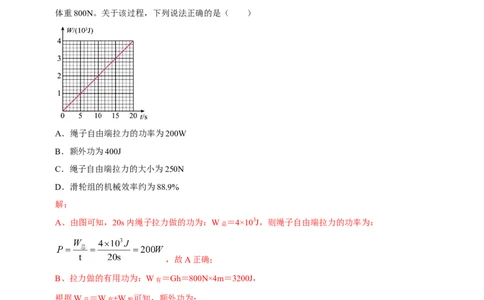
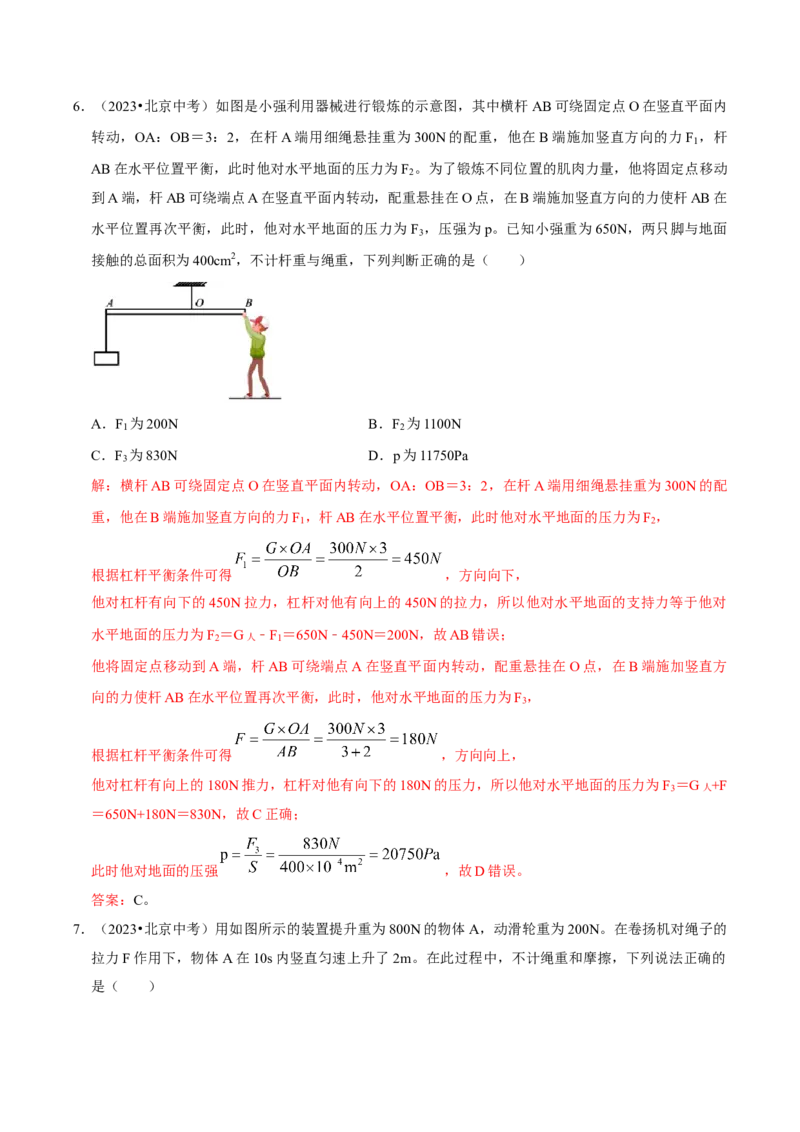
(多选)5.(2024•北京中考)用某滑轮组提升重物时,绳子自由端拉力做功随时间变化的关系如图所
示,在20s内绳子自由端竖直匀速移动16m,重物竖直匀速上升4m。已知动滑轮总重100N,提升的物
体重800N。关于该过程,下列说法正确的是( )
A.绳子自由端拉力的功率为200W
B.额外功为400J
C.绳子自由端拉力的大小为250N
D.滑轮组的机械效率约为88.9%
解:
A、由图可知,20s内绳子拉力做的功为:W总 =4×103J,则绳子自由端拉力的功率为:
,故A正确;
B、拉力做的有用功为:W有 =Gh=800N×4m=3200J,
根据W总 =W有+W额 可知,额外功为:
W额 =W总 ﹣W有 =4×103J﹣3200J=800J,故B错误;
C、根据W总 =Fs可知,绳子自由端拉力的大小为: ,故C正确;
D、滑轮组的机械效率为: ×100%=80%,故D错误。
答案:AC。6.(2023•北京中考)如图是小强利用器械进行锻炼的示意图,其中横杆AB可绕固定点O在竖直平面内
转动,OA:OB=3:2,在杆A端用细绳悬挂重为300N的配重,他在B端施加竖直方向的力F ,杆
1
AB在水平位置平衡,此时他对水平地面的压力为F 。为了锻炼不同位置的肌肉力量,他将固定点移动
2
到A端,杆AB可绕端点A在竖直平面内转动,配重悬挂在O点,在B端施加竖直方向的力使杆AB在
水平位置再次平衡,此时,他对水平地面的压力为 F ,压强为p。已知小强重为650N,两只脚与地面
3
接触的总面积为400cm2,不计杆重与绳重,下列判断正确的是( )
A.F 为200N B.F 为1100N
1 2
C.F 为830N D.p为11750Pa
3
解:横杆AB可绕固定点O在竖直平面内转动,OA:OB=3:2,在杆A端用细绳悬挂重为300N的配
重,他在B端施加竖直方向的力F ,杆AB在水平位置平衡,此时他对水平地面的压力为F ,
1 2
根据杠杆平衡条件可得 ,方向向下,
他对杠杆有向下的450N拉力,杠杆对他有向上的450N的拉力,所以他对水平地面的支持力等于他对
水平地面的压力为F
2
=G人 ﹣F
1
=650N﹣450N=200N,故AB错误;
他将固定点移动到A端,杆AB可绕端点A在竖直平面内转动,配重悬挂在O点,在B端施加竖直方
向的力使杆AB在水平位置再次平衡,此时,他对水平地面的压力为F ,
3
根据杠杆平衡条件可得 ,方向向上,
他对杠杆有向上的180N推力,杠杆对他有向下的180N的压力,所以他对水平地面的压力为F
3
=G人+F
=650N+180N=830N,故C正确;
此时他对地面的压强 ,故D错误。
答案:C。
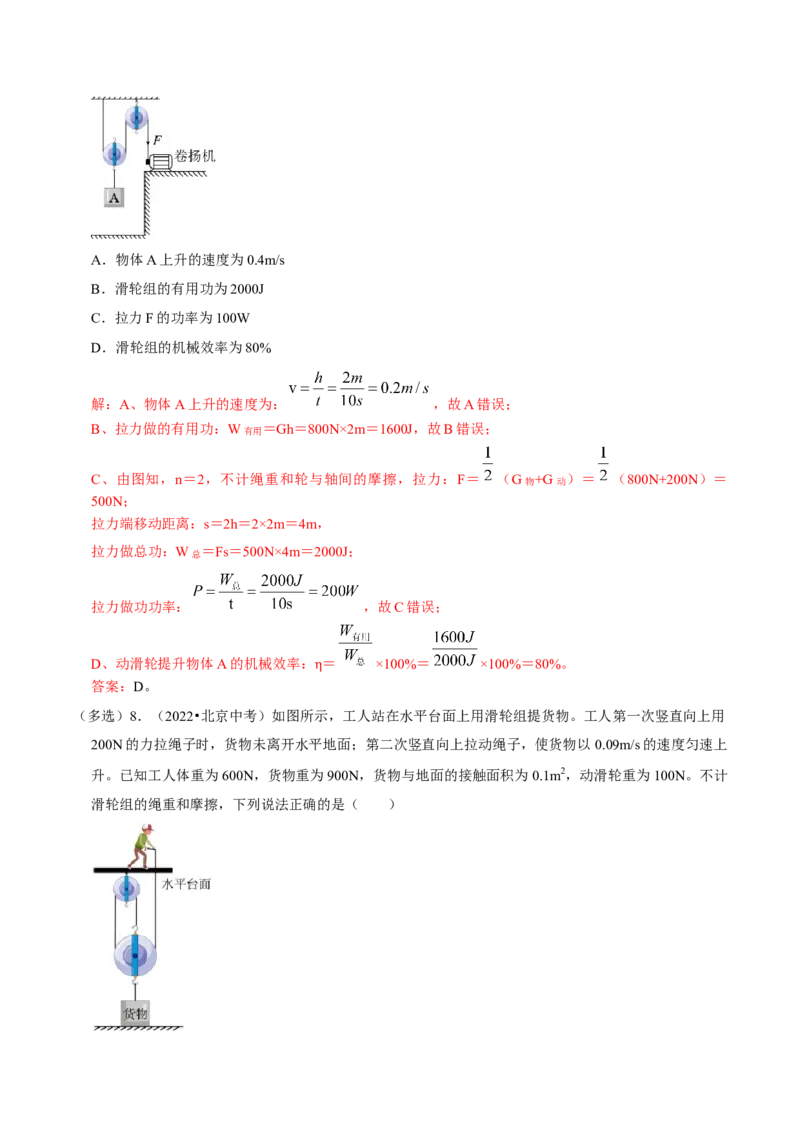
7.(2023•北京中考)用如图所示的装置提升重为800N的物体A,动滑轮重为200N。在卷扬机对绳子的
拉力F作用下,物体A在10s内竖直匀速上升了2m。在此过程中,不计绳重和摩擦,下列说法正确的
是( )A.物体A上升的速度为0.4m/s
B.滑轮组的有用功为2000J
C.拉力F的功率为100W
D.滑轮组的机械效率为80%
解:A、物体A上升的速度为: ,故A错误;
B、拉力做的有用功:W有用 =Gh=800N×2m=1600J,故B错误;
C、由图知,n=2,不计绳重和轮与轴间的摩擦,拉力:F= (G物+G动 )= (800N+200N)=
500N;
拉力端移动距离:s=2h=2×2m=4m,
拉力做总功:W总 =Fs=500N×4m=2000J;
拉力做功功率: ,故C错误;
D、动滑轮提升物体A的机械效率: = ×100%= ×100%=80%。
答案:D。
η
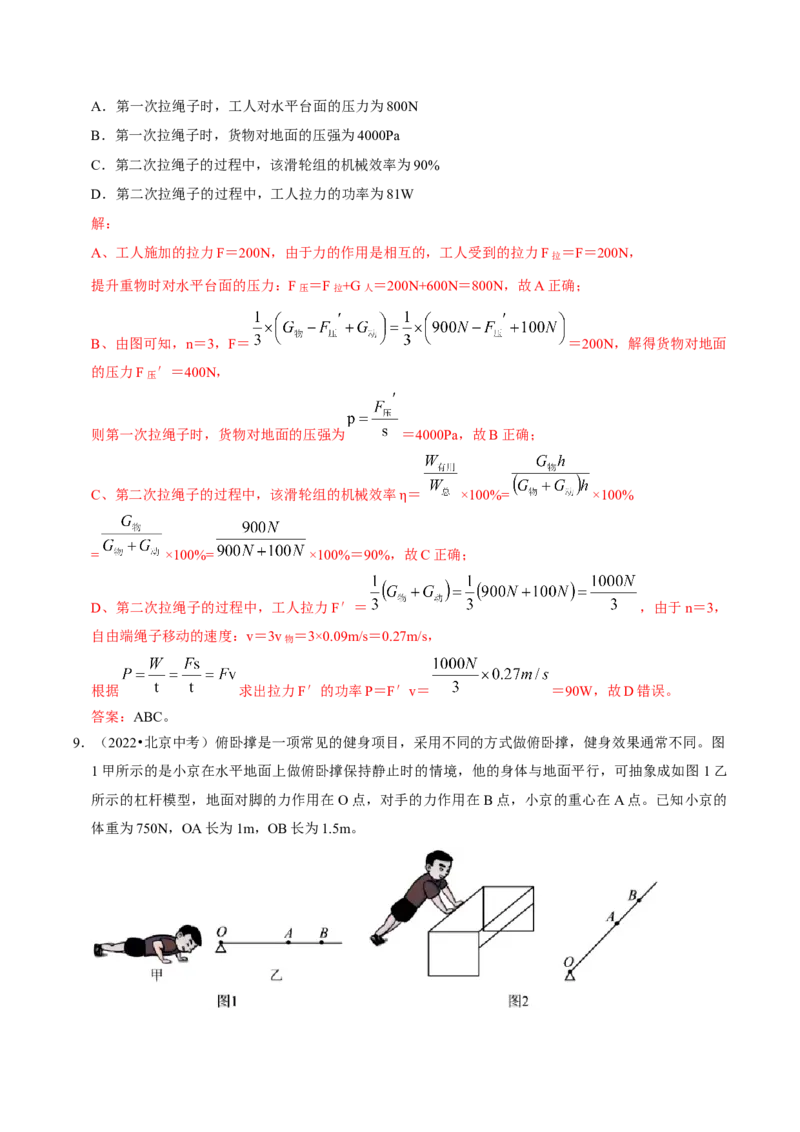
(多选)8.(2022•北京中考)如图所示,工人站在水平台面上用滑轮组提货物。工人第一次竖直向上用
200N的力拉绳子时,货物未离开水平地面;第二次竖直向上拉动绳子,使货物以0.09m/s的速度匀速上
升。已知工人体重为600N,货物重为900N,货物与地面的接触面积为0.1m2,动滑轮重为100N。不计
滑轮组的绳重和摩擦,下列说法正确的是( )A.第一次拉绳子时,工人对水平台面的压力为800N
B.第一次拉绳子时,货物对地面的压强为4000Pa
C.第二次拉绳子的过程中,该滑轮组的机械效率为90%
D.第二次拉绳子的过程中,工人拉力的功率为81W
解:
A、工人施加的拉力F=200N,由于力的作用是相互的,工人受到的拉力F拉 =F=200N,
提升重物时对水平台面的压力:F压 =F拉+G人 =200N+600N=800N,故A正确;
B、由图可知,n=3,F= =200N,解得货物对地面
的压力F压 ′=400N,
则第一次拉绳子时,货物对地面的压强为 =4000Pa,故B正确;
C、第二次拉绳子的过程中,该滑轮组的机械效率 = ×100%= ×100%
η
= ×100%= ×100%=90%,故C正确;
D、第二次拉绳子的过程中,工人拉力F′= ,由于n=3,
自由端绳子移动的速度:v=3v物 =3×0.09m/s=0.27m/s,
根据 求出拉力F′的功率P=F′v= =90W,故D错误。
答案:ABC。
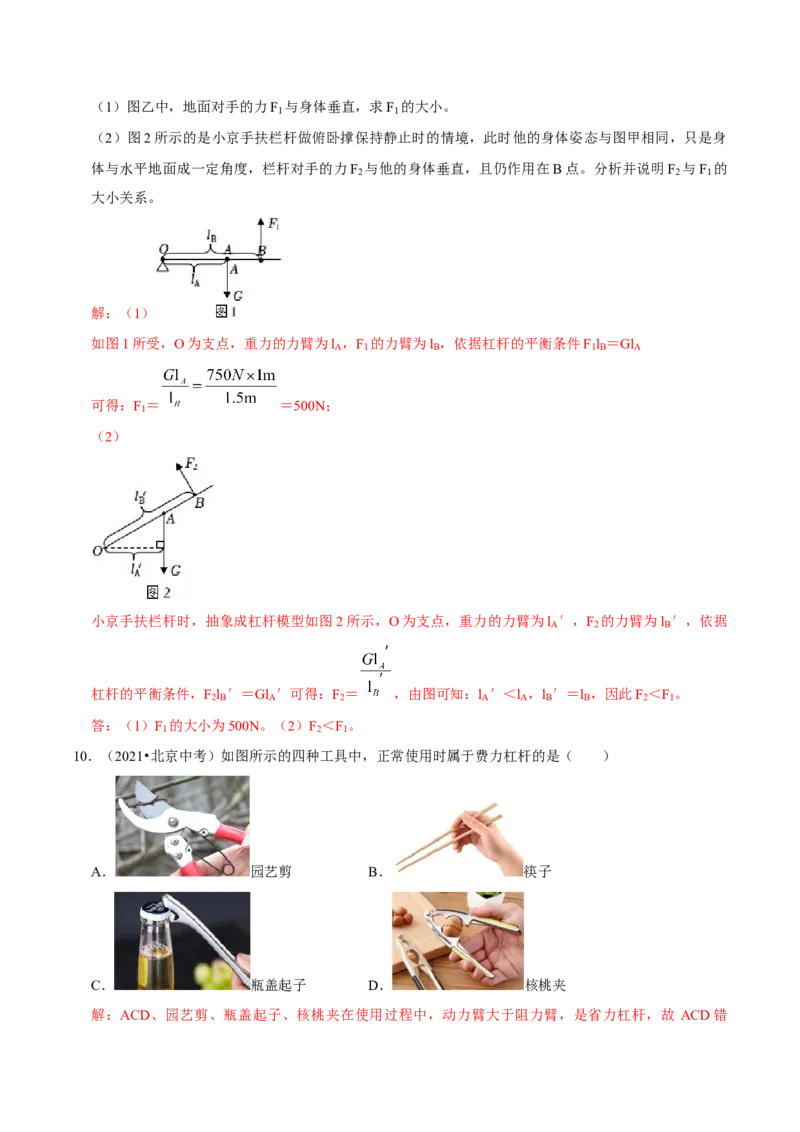
9.(2022•北京中考)俯卧撑是一项常见的健身项目,采用不同的方式做俯卧撑,健身效果通常不同。图
1甲所示的是小京在水平地面上做俯卧撑保持静止时的情境,他的身体与地面平行,可抽象成如图 1乙
所示的杠杆模型,地面对脚的力作用在 O点,对手的力作用在B点,小京的重心在A点。已知小京的
体重为750N,OA长为1m,OB长为1.5m。(1)图乙中,地面对手的力F 与身体垂直,求F 的大小。
1 1
(2)图2所示的是小京手扶栏杆做俯卧撑保持静止时的情境,此时他的身体姿态与图甲相同,只是身
体与水平地面成一定角度,栏杆对手的力F 与他的身体垂直,且仍作用在B点。分析并说明F 与F 的
2 2 1
大小关系。
解:(1)
如图1所受,O为支点,重力的力臂为l ,F 的力臂为l ,依据杠杆的平衡条件F l =Gl
A 1 B 1B A
可得:F = =500N;
1
(2)
小京手扶栏杆时,抽象成杠杆模型如图2所示,O为支点,重力的力臂为l ′,F 的力臂为l ′,依据
A 2 B
杠杆的平衡条件,F l ′=Gl ′可得:F = ,由图可知:l ′<l ,l ′=l ,因此F <F 。
2B A 2 A A B B 2 1
答:(1)F 的大小为500N。(2)F <F 。
1 2 1
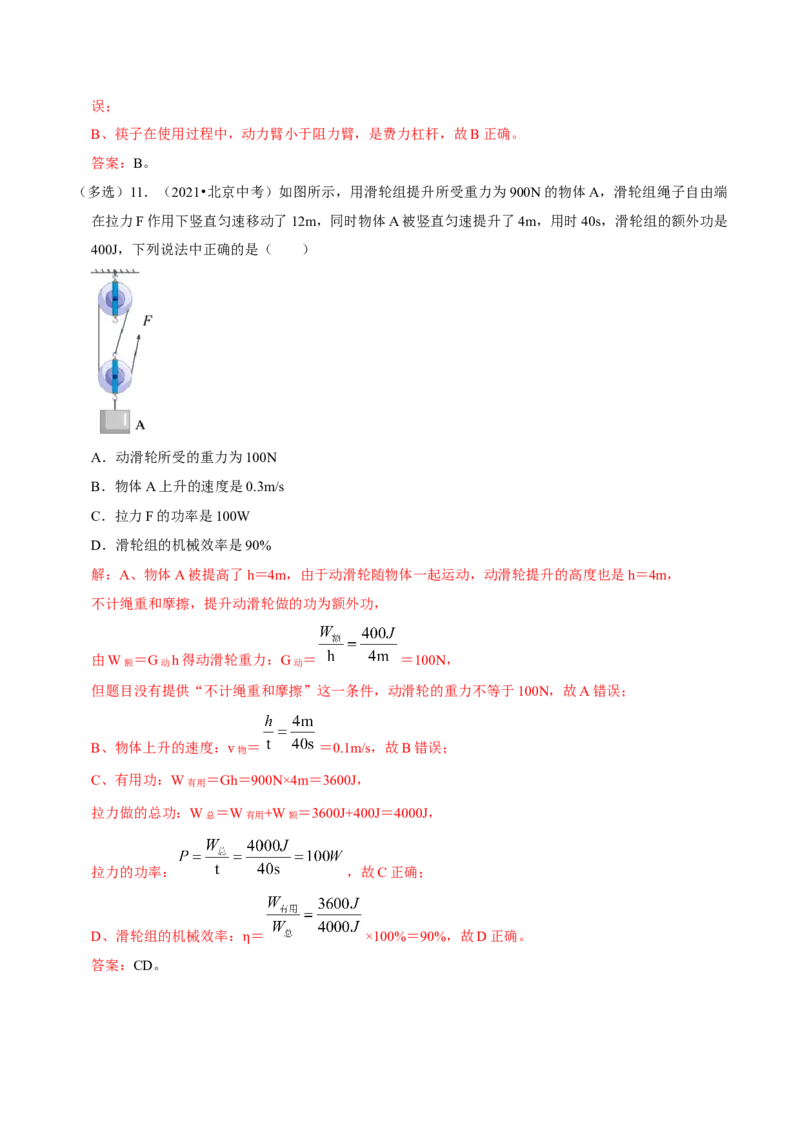
10.(2021•北京中考)如图所示的四种工具中,正常使用时属于费力杠杆的是( )
A. 园艺剪 B. 筷子
C. 瓶盖起子 D. 核桃夹
解:ACD、园艺剪、瓶盖起子、核桃夹在使用过程中,动力臂大于阻力臂,是省力杠杆,故 ACD错误;
B、筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故B正确。
答案:B。
(多选)11.(2021•北京中考)如图所示,用滑轮组提升所受重力为900N的物体A,滑轮组绳子自由端
在拉力F作用下竖直匀速移动了12m,同时物体A被竖直匀速提升了4m,用时40s,滑轮组的额外功是
400J,下列说法中正确的是( )
A.动滑轮所受的重力为100N
B.物体A上升的速度是0.3m/s
C.拉力F的功率是100W
D.滑轮组的机械效率是90%
解:A、物体A被提高了h=4m,由于动滑轮随物体一起运动,动滑轮提升的高度也是h=4m,
不计绳重和摩擦,提升动滑轮做的功为额外功,
由W额 =G动h得动滑轮重力:G动 = =100N,
但题目没有提供“不计绳重和摩擦”这一条件,动滑轮的重力不等于100N,故A错误;
B、物体上升的速度:v物 = =0.1m/s,故B错误;
C、有用功:W有用 =Gh=900N×4m=3600J,
拉力做的总功:W总 =W有用+W额 =3600J+400J=4000J,
拉力的功率: ,故C正确;
D、滑轮组的机械效率: = ×100%=90%,故D正确。
答案:CD。 η考点01 杠杆分类及在生活中的应用
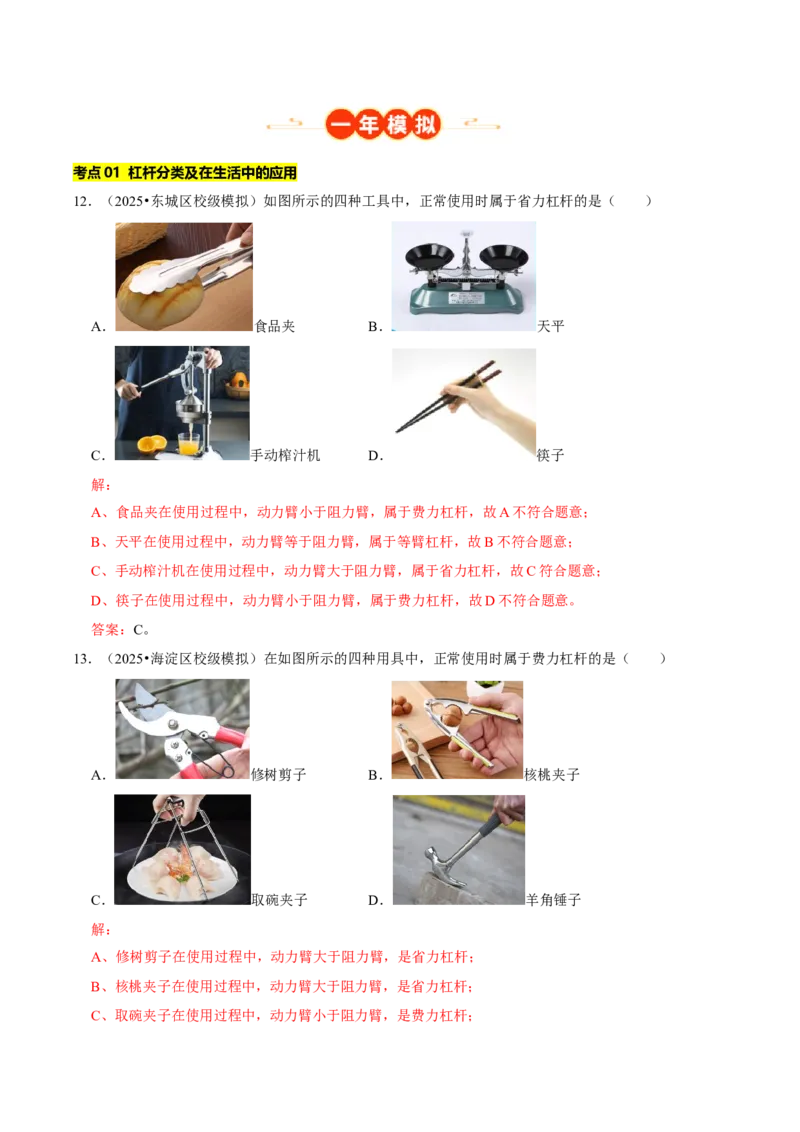
12.(2025•东城区校级模拟)如图所示的四种工具中,正常使用时属于省力杠杆的是( )
A. 食品夹 B. 天平
C. 手动榨汁机 D. 筷子
解:
A、食品夹在使用过程中,动力臂小于阻力臂,属于费力杠杆,故A不符合题意;
B、天平在使用过程中,动力臂等于阻力臂,属于等臂杠杆,故B不符合题意;
C、手动榨汁机在使用过程中,动力臂大于阻力臂,属于省力杠杆,故C符合题意;
D、筷子在使用过程中,动力臂小于阻力臂,属于费力杠杆,故D不符合题意。
答案:C。
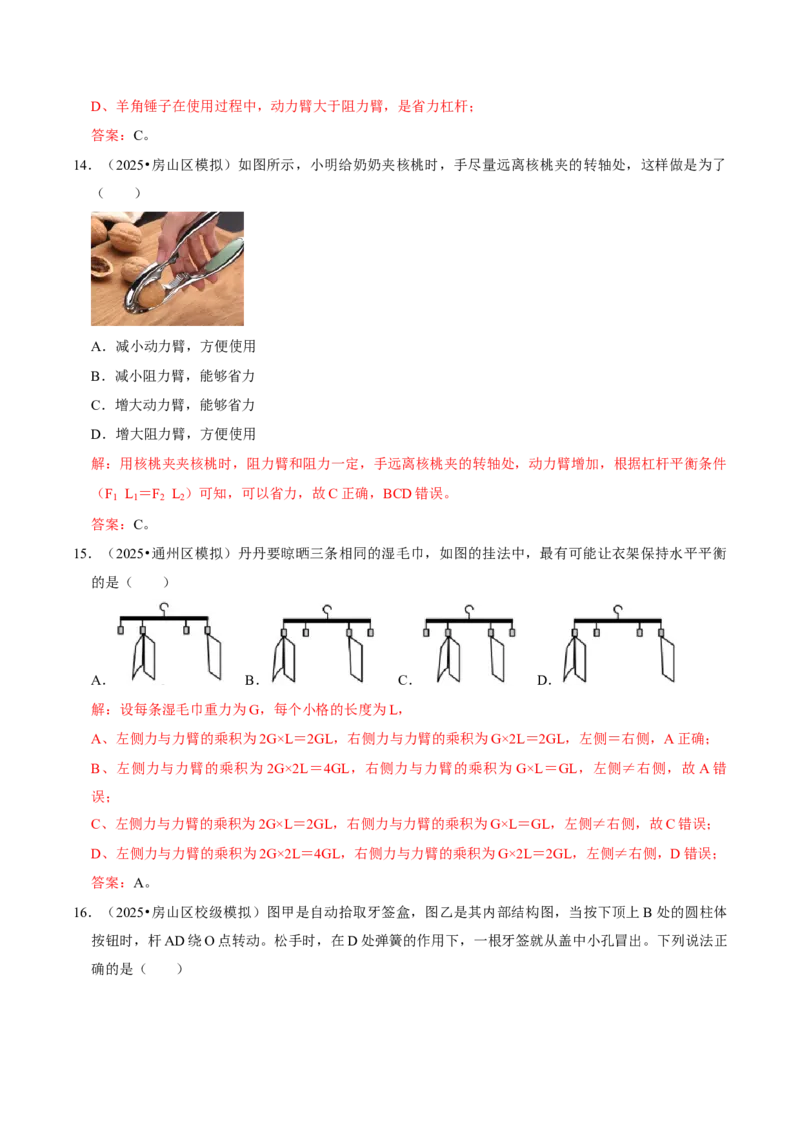
13.(2025•海淀区校级模拟)在如图所示的四种用具中,正常使用时属于费力杠杆的是( )
A. 修树剪子 B. 核桃夹子
C. 取碗夹子 D. 羊角锤子
解:
A、修树剪子在使用过程中,动力臂大于阻力臂,是省力杠杆;
B、核桃夹子在使用过程中,动力臂大于阻力臂,是省力杠杆;
C、取碗夹子在使用过程中,动力臂小于阻力臂,是费力杠杆;D、羊角锤子在使用过程中,动力臂大于阻力臂,是省力杠杆;
答案:C。
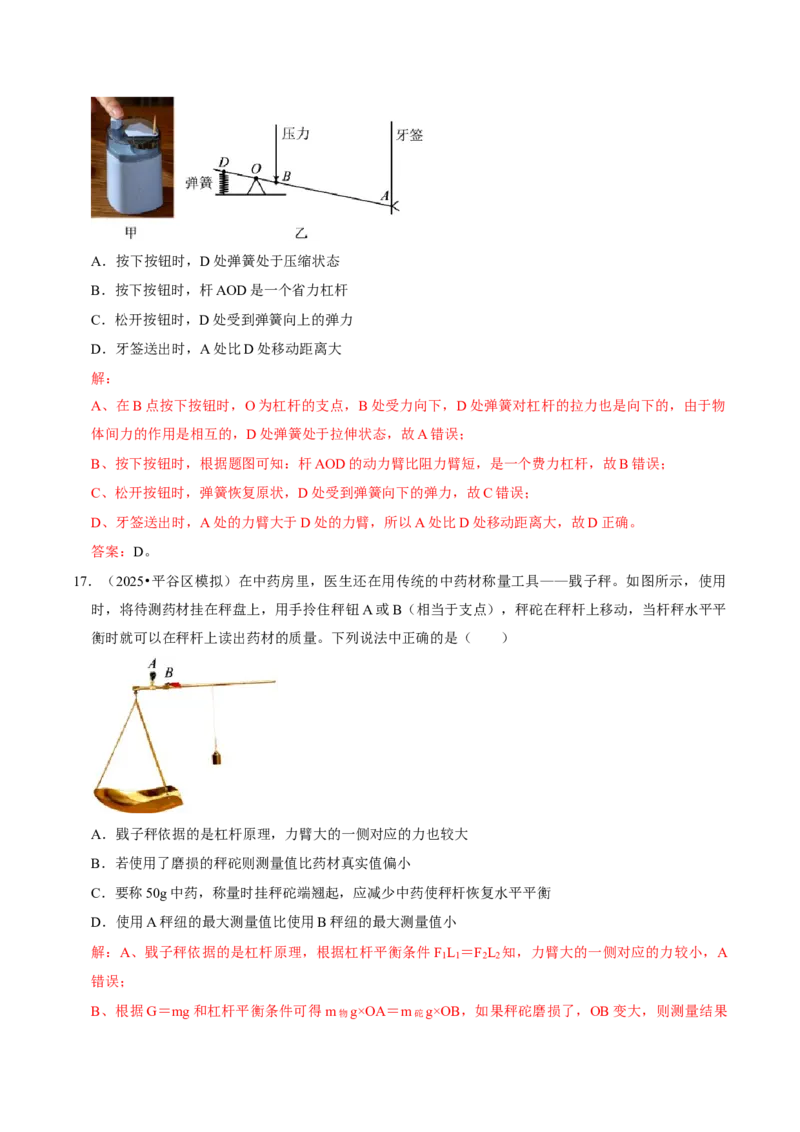
14.(2025•房山区模拟)如图所示,小明给奶奶夹核桃时,手尽量远离核桃夹的转轴处,这样做是为了
( )
A.减小动力臂,方便使用
B.减小阻力臂,能够省力
C.增大动力臂,能够省力
D.增大阻力臂,方便使用
解:用核桃夹夹核桃时,阻力臂和阻力一定,手远离核桃夹的转轴处,动力臂增加,根据杠杆平衡条件
(F L =F L )可知,可以省力,故C正确,BCD错误。
1 1 2 2
答案:C。
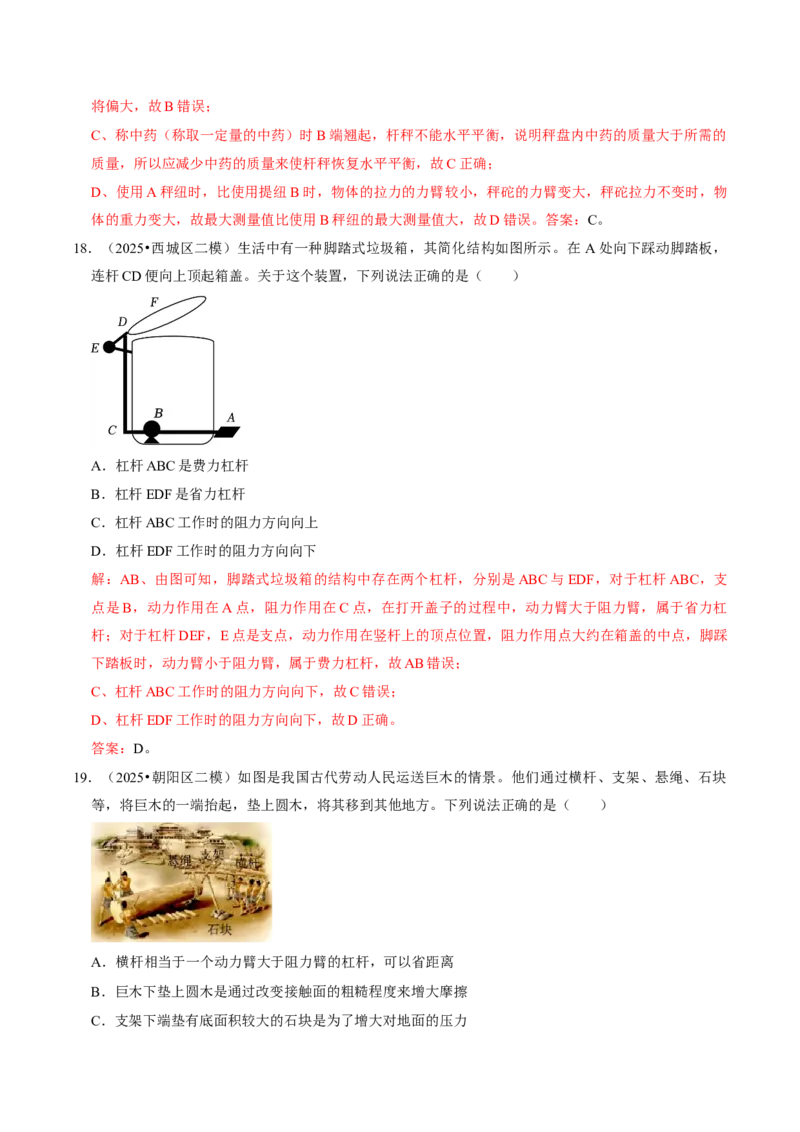
15.(2025•通州区模拟)丹丹要晾晒三条相同的湿毛巾,如图的挂法中,最有可能让衣架保持水平平衡
的是( )
A. B. C. D.
解:设每条湿毛巾重力为G,每个小格的长度为L,
A、左侧力与力臂的乘积为2G×L=2GL,右侧力与力臂的乘积为G×2L=2GL,左侧=右侧,A正确;
B、左侧力与力臂的乘积为 2G×2L=4GL,右侧力与力臂的乘积为 G×L=GL,左侧≠右侧,故A错
误;
C、左侧力与力臂的乘积为2G×L=2GL,右侧力与力臂的乘积为G×L=GL,左侧≠右侧,故C错误;
D、左侧力与力臂的乘积为2G×2L=4GL,右侧力与力臂的乘积为G×2L=2GL,左侧≠右侧,D错误;
答案:A。
16.(2025•房山区校级模拟)图甲是自动拾取牙签盒,图乙是其内部结构图,当按下顶上B处的圆柱体
按钮时,杆AD绕O点转动。松手时,在D处弹簧的作用下,一根牙签就从盖中小孔冒出。下列说法正
确的是( )A.按下按钮时,D处弹簧处于压缩状态
B.按下按钮时,杆AOD是一个省力杠杆
C.松开按钮时,D处受到弹簧向上的弹力
D.牙签送出时,A处比D处移动距离大
解:
A、在B点按下按钮时,O为杠杆的支点,B处受力向下,D处弹簧对杠杆的拉力也是向下的,由于物
体间力的作用是相互的,D处弹簧处于拉伸状态,故A错误;
B、按下按钮时,根据题图可知:杆AOD的动力臂比阻力臂短,是一个费力杠杆,故B错误;
C、松开按钮时,弹簧恢复原状,D处受到弹簧向下的弹力,故C错误;
D、牙签送出时,A处的力臂大于D处的力臂,所以A处比D处移动距离大,故D正确。
答案:D。
17.(2025•平谷区模拟)在中药房里,医生还在用传统的中药材称量工具——戥子秤。如图所示,使用
时,将待测药材挂在秤盘上,用手拎住秤钮A或B(相当于支点),秤砣在秤杆上移动,当杆秤水平平
衡时就可以在秤杆上读出药材的质量。下列说法中正确的是( )
A.戥子秤依据的是杠杆原理,力臂大的一侧对应的力也较大
B.若使用了磨损的秤砣则测量值比药材真实值偏小
C.要称50g中药,称量时挂秤砣端翘起,应减少中药使秤杆恢复水平平衡
D.使用A秤纽的最大测量值比使用B秤纽的最大测量值小
解:A、戥子秤依据的是杠杆原理,根据杠杆平衡条件F L =F L 知,力臂大的一侧对应的力较小,A
1 1 2 2
错误;
B、根据G=mg和杠杆平衡条件可得m物g×OA=m砣g×OB,如果秤砣磨损了,OB变大,则测量结果将偏大,故B错误;
C、称中药(称取一定量的中药)时B端翘起,杆秤不能水平平衡,说明秤盘内中药的质量大于所需的
质量,所以应减少中药的质量来使杆秤恢复水平平衡,故C正确;
D、使用A秤纽时,比使用提纽B时,物体的拉力的力臂较小,秤砣的力臂变大,秤砣拉力不变时,物
体的重力变大,故最大测量值比使用B秤纽的最大测量值大,故D错误。答案:C。
18.(2025•西城区二模)生活中有一种脚踏式垃圾箱,其简化结构如图所示。在 A处向下踩动脚踏板,
连杆CD便向上顶起箱盖。关于这个装置,下列说法正确的是( )
A.杠杆ABC是费力杠杆
B.杠杆EDF是省力杠杆
C.杠杆ABC工作时的阻力方向向上
D.杠杆EDF工作时的阻力方向向下
解:AB、由图可知,脚踏式垃圾箱的结构中存在两个杠杆,分别是ABC与EDF,对于杠杆ABC,支
点是B,动力作用在A点,阻力作用在C点,在打开盖子的过程中,动力臂大于阻力臂,属于省力杠
杆;对于杠杆DEF,E点是支点,动力作用在竖杆上的顶点位置,阻力作用点大约在箱盖的中点,脚踩
下踏板时,动力臂小于阻力臂,属于费力杠杆,故AB错误;
C、杠杆ABC工作时的阻力方向向下,故C错误;
D、杠杆EDF工作时的阻力方向向下,故D正确。
答案:D。
19.(2025•朝阳区二模)如图是我国古代劳动人民运送巨木的情景。他们通过横杆、支架、悬绳、石块
等,将巨木的一端抬起,垫上圆木,将其移到其他地方。下列说法正确的是( )
A.横杆相当于一个动力臂大于阻力臂的杠杆,可以省距离
B.巨木下垫上圆木是通过改变接触面的粗糙程度来增大摩擦
C.支架下端垫有底面积较大的石块是为了增大对地面的压力D.缩短横杆上悬绳与支架之间的距离,更省力
解:
A、分析图示可知,工人对横杆右端的拉力为动力,悬绳对横杆左端的拉力为阻力,此时横杆相当于一
个动力臂大于阻力臂的杠杆,属于省力杠杆,省力但费距离,故A错误;
B、在巨木下垫上一些圆木,是通过变滑动为滚动来减小摩擦,使圆木更容易向前移动,故B错误。
C、支架下端垫有底面积较大的石块,是通过增大受力面积来减小支架对地面的压强,使支架不会陷入
地面,故C错误。
D、缩短横杆上悬绳与支架之间的距离,则阻力臂减小,在阻力、动力臂不变时,由杠杆平衡条件可知
动力将减小,即更省力,有助于抬起巨木,故D正确;
答案:D。
考点02 杠杆平衡条件的计算
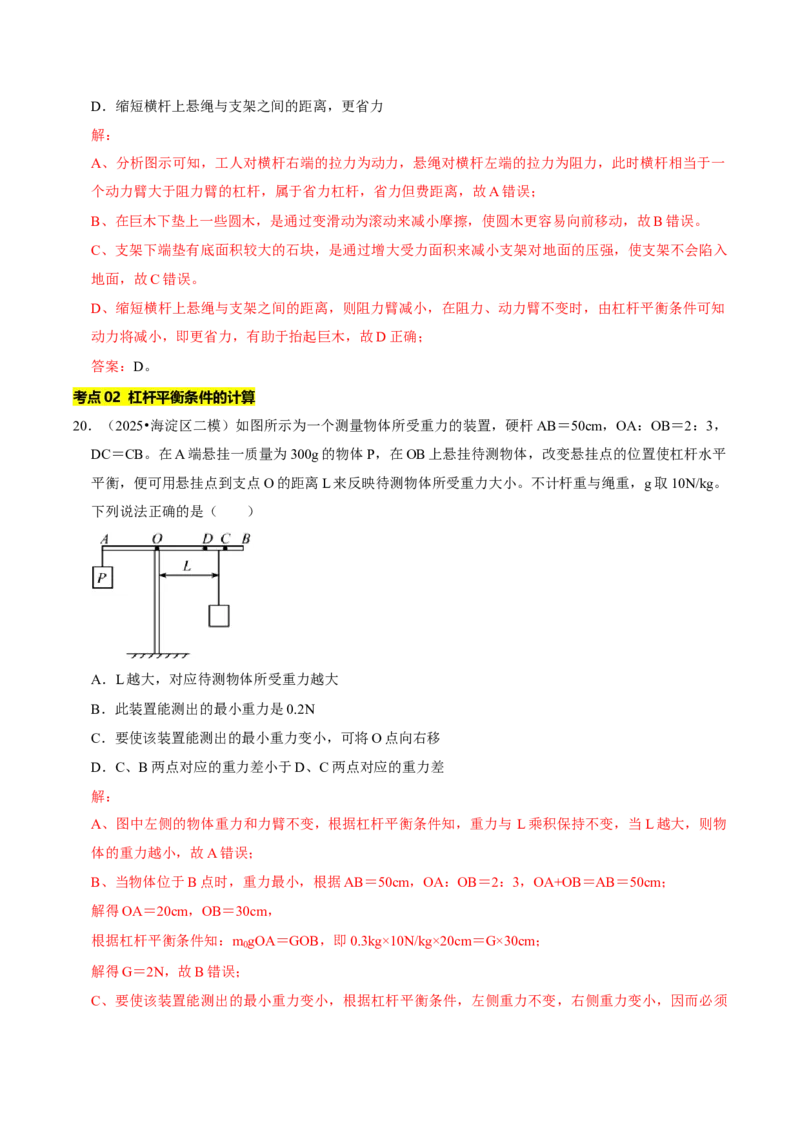
20.(2025•海淀区二模)如图所示为一个测量物体所受重力的装置,硬杆AB=50cm,OA:OB=2:3,
DC=CB。在A端悬挂一质量为300g的物体P,在OB上悬挂待测物体,改变悬挂点的位置使杠杆水平
平衡,便可用悬挂点到支点O的距离L来反映待测物体所受重力大小。不计杆重与绳重,g取10N/kg。
下列说法正确的是( )
A.L越大,对应待测物体所受重力越大
B.此装置能测出的最小重力是0.2N
C.要使该装置能测出的最小重力变小,可将O点向右移
D.C、B两点对应的重力差小于D、C两点对应的重力差
解:
A、图中左侧的物体重力和力臂不变,根据杠杆平衡条件知,重力与 L乘积保持不变,当L越大,则物
体的重力越小,故A错误;
B、当物体位于B点时,重力最小,根据AB=50cm,OA:OB=2:3,OA+OB=AB=50cm;
解得OA=20cm,OB=30cm,
根据杠杆平衡条件知:m gOA=GOB,即0.3kg×10N/kg×20cm=G×30cm;
0
解得G=2N,故B错误;
C、要使该装置能测出的最小重力变小,根据杠杆平衡条件,左侧重力不变,右侧重力变小,因而必须增大右侧的力臂,减小左侧的力臂,故O向左移动,故C错误;
D、根据DC=CB,根据杠杆平衡条件知,m gOA=GL,即G与L成反比关系,根据反比例图像知,
0
当L均匀增大,重力越来越小,由于无限接近0,不能达到0,所以减小的幅度越来越小,因而CB对
应的力臂大,则重力减小较慢,故C、B两点对应的重力差小于D、C两点对应的重力差,故D正确。
答案:D。
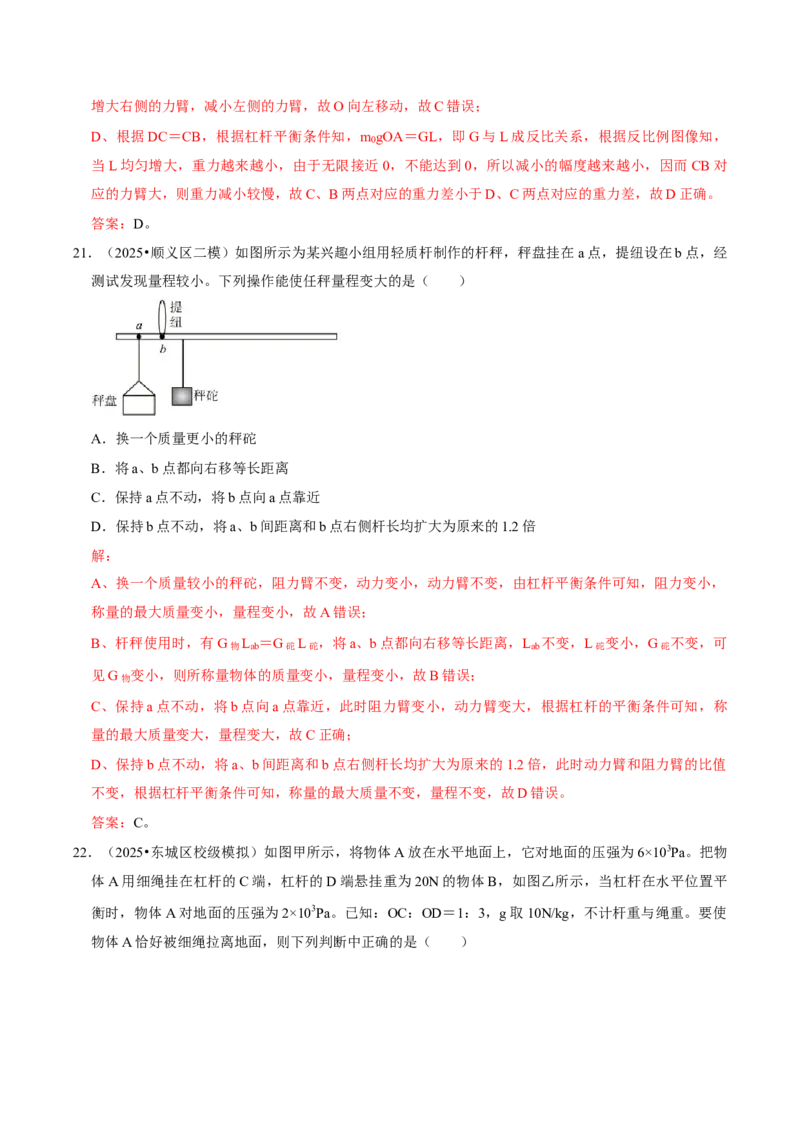
21.(2025•顺义区二模)如图所示为某兴趣小组用轻质杆制作的杆秤,秤盘挂在 a点,提纽设在b点,经
测试发现量程较小。下列操作能使任秤量程变大的是( )
A.换一个质量更小的秤砣
B.将a、b点都向右移等长距离
C.保持a点不动,将b点向a点靠近
D.保持b点不动,将a、b间距离和b点右侧杆长均扩大为原来的1.2倍
解:
A、换一个质量较小的秤砣,阻力臂不变,动力变小,动力臂不变,由杠杆平衡条件可知,阻力变小,
称量的最大质量变小,量程变小,故A错误;
B、杆秤使用时,有G物L
ab
=G砣L砣 ,将a、b点都向右移等长距离,L
ab
不变,L砣 变小,G砣 不变,可
见G物 变小,则所称量物体的质量变小,量程变小,故B错误;
C、保持a点不动,将b点向a点靠近,此时阻力臂变小,动力臂变大,根据杠杆的平衡条件可知,称
量的最大质量变大,量程变大,故C正确;
D、保持b点不动,将a、b间距离和b点右侧杆长均扩大为原来的1.2倍,此时动力臂和阻力臂的比值
不变,根据杠杆平衡条件可知,称量的最大质量不变,量程不变,故D错误。
答案:C。
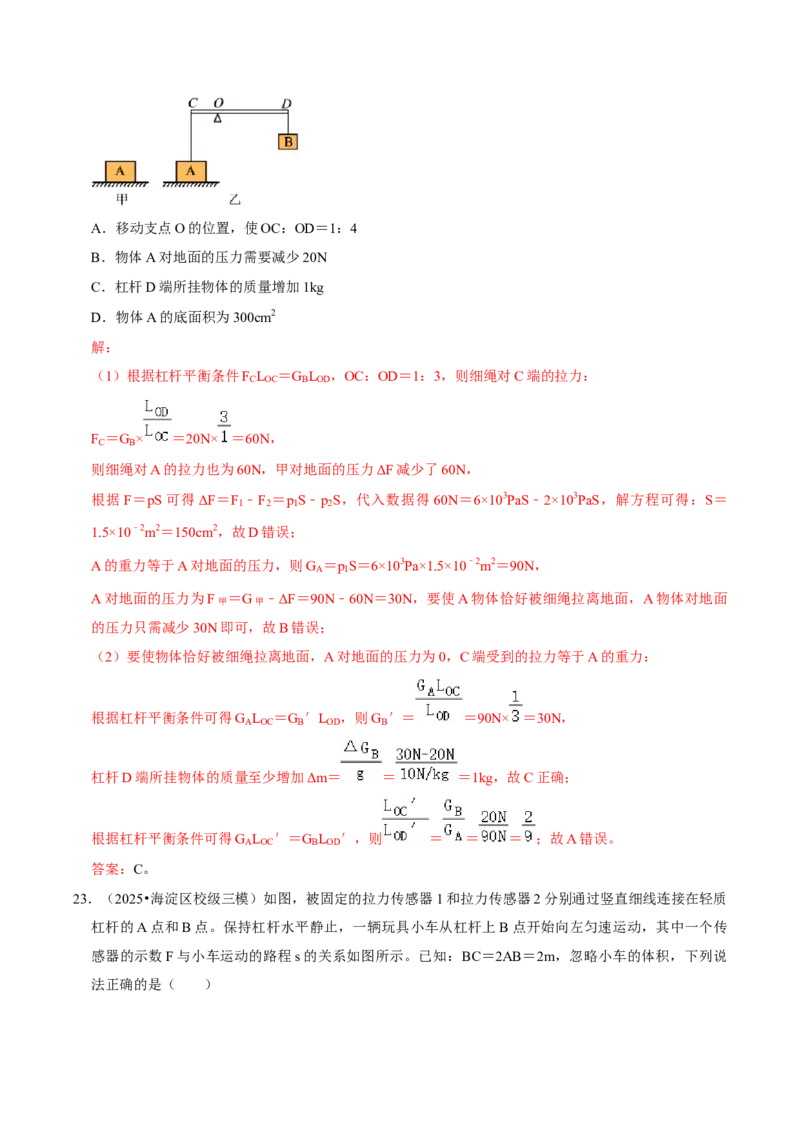
22.(2025•东城区校级模拟)如图甲所示,将物体A放在水平地面上,它对地面的压强为6×103Pa。把物
体A用细绳挂在杠杆的C端,杠杆的D端悬挂重为20N的物体B,如图乙所示,当杠杆在水平位置平
衡时,物体A对地面的压强为2×103Pa。已知:OC:OD=1:3,g取10N/kg,不计杆重与绳重。要使
物体A恰好被细绳拉离地面,则下列判断中正确的是( )A.移动支点O的位置,使OC:OD=1:4
B.物体A对地面的压力需要减少20N
C.杠杆D端所挂物体的质量增加1kg
D.物体A的底面积为300cm2
解:
(1)根据杠杆平衡条件F L =G L ,OC:OD=1:3,则细绳对C端的拉力:
C OC B OD
F =G × =20N× =60N,
C B
则细绳对A的拉力也为60N,甲对地面的压力ΔF减少了60N,
根据F=pS可得ΔF=F ﹣F =p S﹣p S,代入数据得60N=6×103PaS﹣2×103PaS,解方程可得:S=
1 2 1 2
1.5×10﹣2m2=150cm2,故D错误;
A的重力等于A对地面的压力,则G =p S=6×103Pa×1.5×10﹣2m2=90N,
A 1
A对地面的压力为F甲 =G甲 ﹣ΔF=90N﹣60N=30N,要使A物体恰好被细绳拉离地面,A物体对地面
的压力只需减少30N即可,故B错误;
(2)要使物体恰好被细绳拉离地面,A对地面的压力为0,C端受到的拉力等于A的重力:
根据杠杆平衡条件可得G L =G ′L ,则G ′= =90N× =30N,
A OC B OD B
杠杆D端所挂物体的质量至少增加Δm= = =1kg,故C正确;
根据杠杆平衡条件可得G L ′=G L ′,则 = = = ;故A错误。
A OC B OD
答案:C。
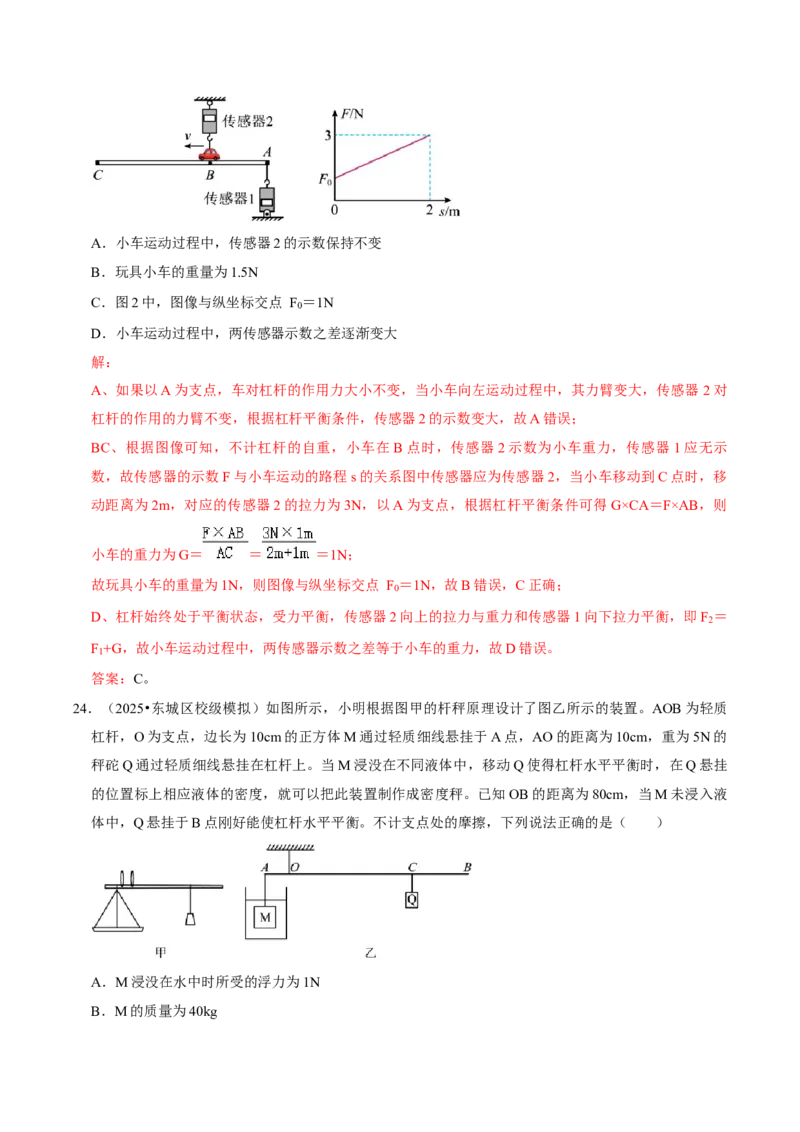
23.(2025•海淀区校级三模)如图,被固定的拉力传感器1和拉力传感器2分别通过竖直细线连接在轻质
杠杆的A点和B点。保持杠杆水平静止,一辆玩具小车从杠杆上B点开始向左匀速运动,其中一个传
感器的示数F与小车运动的路程s的关系如图所示。已知:BC=2AB=2m,忽略小车的体积,下列说
法正确的是( )A.小车运动过程中,传感器2的示数保持不变
B.玩具小车的重量为1.5N
C.图2中,图像与纵坐标交点 F =1N
0
D.小车运动过程中,两传感器示数之差逐渐变大
解:
A、如果以A为支点,车对杠杆的作用力大小不变,当小车向左运动过程中,其力臂变大,传感器 2对
杠杆的作用的力臂不变,根据杠杆平衡条件,传感器2的示数变大,故A错误;
BC、根据图像可知,不计杠杆的自重,小车在 B点时,传感器2示数为小车重力,传感器1应无示
数,故传感器的示数F与小车运动的路程s的关系图中传感器应为传感器2,当小车移动到C点时,移
动距离为2m,对应的传感器2的拉力为3N,以A为支点,根据杠杆平衡条件可得G×CA=F×AB,则
小车的重力为G= = =1N;
故玩具小车的重量为1N,则图像与纵坐标交点 F =1N,故B错误,C正确;
0
D、杠杆始终处于平衡状态,受力平衡,传感器2向上的拉力与重力和传感器1向下拉力平衡,即F =
2
F +G,故小车运动过程中,两传感器示数之差等于小车的重力,故D错误。
1
答案:C。
24.(2025•东城区校级模拟)如图所示,小明根据图甲的杆秤原理设计了图乙所示的装置。AOB为轻质
杠杆,O为支点,边长为10cm的正方体M通过轻质细线悬挂于A点,AO的距离为10cm,重为5N的
秤砣Q通过轻质细线悬挂在杠杆上。当M浸没在不同液体中,移动Q使得杠杆水平平衡时,在Q悬挂
的位置标上相应液体的密度,就可以把此装置制作成密度秤。已知OB的距离为80cm,当M未浸入液
体中,Q悬挂于B点刚好能使杠杆水平平衡。不计支点处的摩擦,下列说法正确的是( )
A.M浸没在水中时所受的浮力为1N
B.M的质量为40kgC.水的密度应标在距离O点60cm处
D.离O点越近的位置标的液体密度越小
解:A、根据M浸没在水中时所受的浮力F= v排g=1.0×103N/kg×103×10﹣6m3×10N/kg=10N,故A错
误; ρ
B、根据杠杆平衡条件:F L =F L 可得:
1 1 2 2
G×10cm=5N×80cm得:G=40N,根据m= = =4kg,故B错误;
C、当F L =F L 可得:
1 1 2 2
物体浸没在水中时,它受到的浮力为10N,故绳子对它的拉力F拉 =G﹣F浮 =40N﹣10N=30N,根据杠
杆平衡条件:F L =F L 可得:30N×10cm=5N×L 得:L =60cm,故C正确;
1 1 2 2 2 2
D、根据杠杆平衡条件:F
1
L
1
=F
2
L
2
可得,由于F
2
和L
1
不变,L
2
越小,则F
1
越小,根据F
1
=G﹣F浮 可
知,物体M受到的浮力越大,根据F浮 = 液gV排可知,
液
越大,故D错误。
答案:C。 ρ ρ
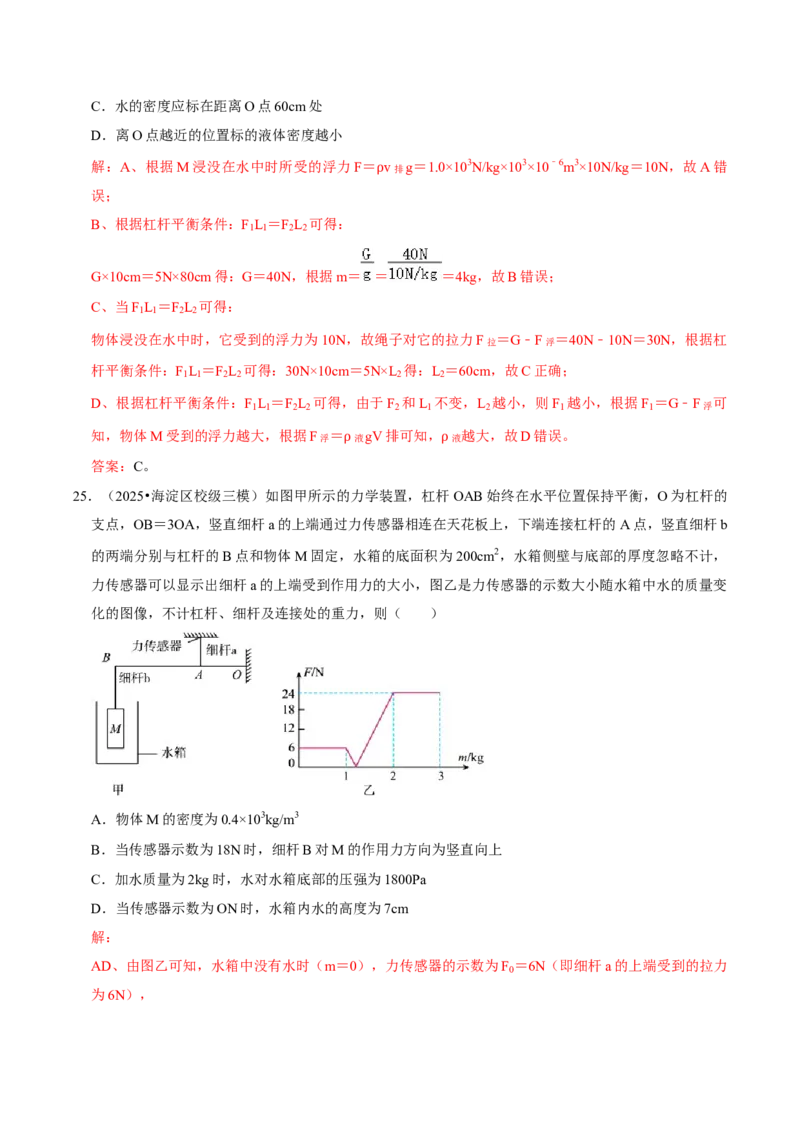
25.(2025•海淀区校级三模)如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的
支点,OB=3OA,竖直细杆a的上端通过力传感器相连在天花板上,下端连接杠杆的A点,竖直细杆b
的两端分别与杠杆的B点和物体M固定,水箱的底面积为200cm2,水箱侧壁与底部的厚度忽略不计,
力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变
化的图像,不计杠杆、细杆及连接处的重力,则( )
A.物体M的密度为0.4×103kg/m3
B.当传感器示数为18N时,细杆B对M的作用力方向为竖直向上
C.加水质量为2kg时,水对水箱底部的压强为1800Pa
D.当传感器示数为ON时,水箱内水的高度为7cm
解:
AD、由图乙可知,水箱中没有水时(m=0),力传感器的示数为F =6N(即细杆a的上端受到的拉力
0
为6N),由杠杆的平衡条件可得F ×OA=G ×OB,则G = F = ×6N=2N;
0 M M 0
设M的底面积为S,压力传感器示数为0时M浸入水中的深度为h ,M的高度为h,
1
当压力传感器的压力为零时,M受到的浮力等于M的重力2N,
由图乙可知,当M完全浸没时,压力传感器的示数为24N,
由杠杆的平衡条件可得F ×OA=F ×OB,则F = F = ×24N=8N,
A B B A
对M受力分析可知,受到竖直向上的浮力、竖直向下的重力和杆的作用力,
则此时M受到的浮力:F浮 =G
M
+F
B
=2N+8N=10N;
由F浮 = 液gV排 可得,所以M的体积:V
M
=V排 = = =1×10﹣
3m3, ρ
物体M的密度: = = =0.2×103kg/m3。
M
由图乙可知,加水ρ 1kg时水面达到M的下表面(此时浮力为0),加水2kg时M刚好浸没(此时浮力为
10N),该过程中增加水的质量为1kg,浮力增大了10N,
所以,当加水质量大于1kg后每加0.1kg水,物体M受到的浮力增加1N,当向水箱中加入质量为1.2kg
的水时,受到的浮力为2N,浮力等于重力,左端没有力,则传感器受力为0N,
甲1.2kg的水的体积V= = =1200cm3;
传感器受力为 0N 时,浮力为 2N;V'排 = = =0.2×10﹣3m3=
200cm3;
当传感器受力为0N时,水的深度h = = =7cm;故A错误,D正确。
0
B、当传感器示数为18N时,物体已经经过了0N的点,表示物体从漂浮变为下压,受到了压力,故细
杆B对M的作用力方向为竖直向下,故B错误。
D.加水质量为2kg时,M刚好完全浸没,由选项B可知此时M受到的浮力是10N,由阿基米德原理可
知排开水的重力是10N,
水对水箱底部的压力:F压 =G水+G排 =m水g+G排 =2kg×10N/kg+10N=30N,压强p= = =1500Pa;故C错误。
答案:D。
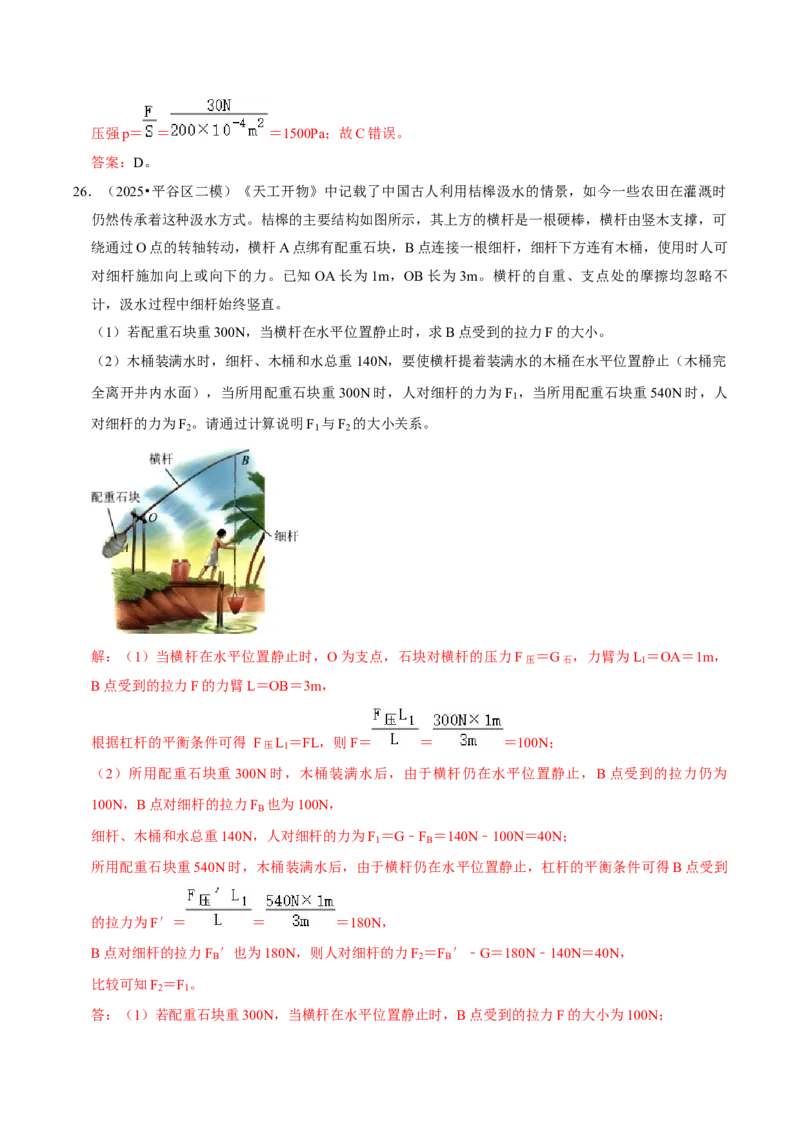
26.(2025•平谷区二模)《天工开物》中记载了中国古人利用桔槔汲水的情景,如今一些农田在灌溉时
仍然传承着这种汲水方式。桔槔的主要结构如图所示,其上方的横杆是一根硬棒,横杆由竖木支撑,可
绕通过O点的转轴转动,横杆A点绑有配重石块,B点连接一根细杆,细杆下方连有木桶,使用时人可
对细杆施加向上或向下的力。已知OA长为1m,OB长为3m。横杆的自重、支点处的摩擦均忽略不
计,汲水过程中细杆始终竖直。
(1)若配重石块重300N,当横杆在水平位置静止时,求B点受到的拉力F的大小。
(2)木桶装满水时,细杆、木桶和水总重140N,要使横杆提着装满水的木桶在水平位置静止(木桶完
全离开井内水面),当所用配重石块重300N时,人对细杆的力为F ,当所用配重石块重540N时,人
1
对细杆的力为F 。请通过计算说明F 与F 的大小关系。
2 1 2
解:(1)当横杆在水平位置静止时,O为支点,石块对横杆的压力F压 =G石 ,力臂为L
1
=OA=1m,
B点受到的拉力F的力臂L=OB=3m,
根据杠杆的平衡条件可得 F压L
1
=FL,则F= = =100N;
(2)所用配重石块重300N时,木桶装满水后,由于横杆仍在水平位置静止,B点受到的拉力仍为
100N,B点对细杆的拉力F 也为100N,
B
细杆、木桶和水总重140N,人对细杆的力为F =G﹣F =140N﹣100N=40N;
1 B
所用配重石块重540N时,木桶装满水后,由于横杆仍在水平位置静止,杠杆的平衡条件可得B点受到
的拉力为F′= = =180N,
B点对细杆的拉力F ′也为180N,则人对细杆的力F =F ′﹣G=180N﹣140N=40N,
B 2 B
比较可知F =F 。
2 1
答:(1)若配重石块重300N,当横杆在水平位置静止时,B点受到的拉力F的大小为100N;(2)F =F 。
2 1
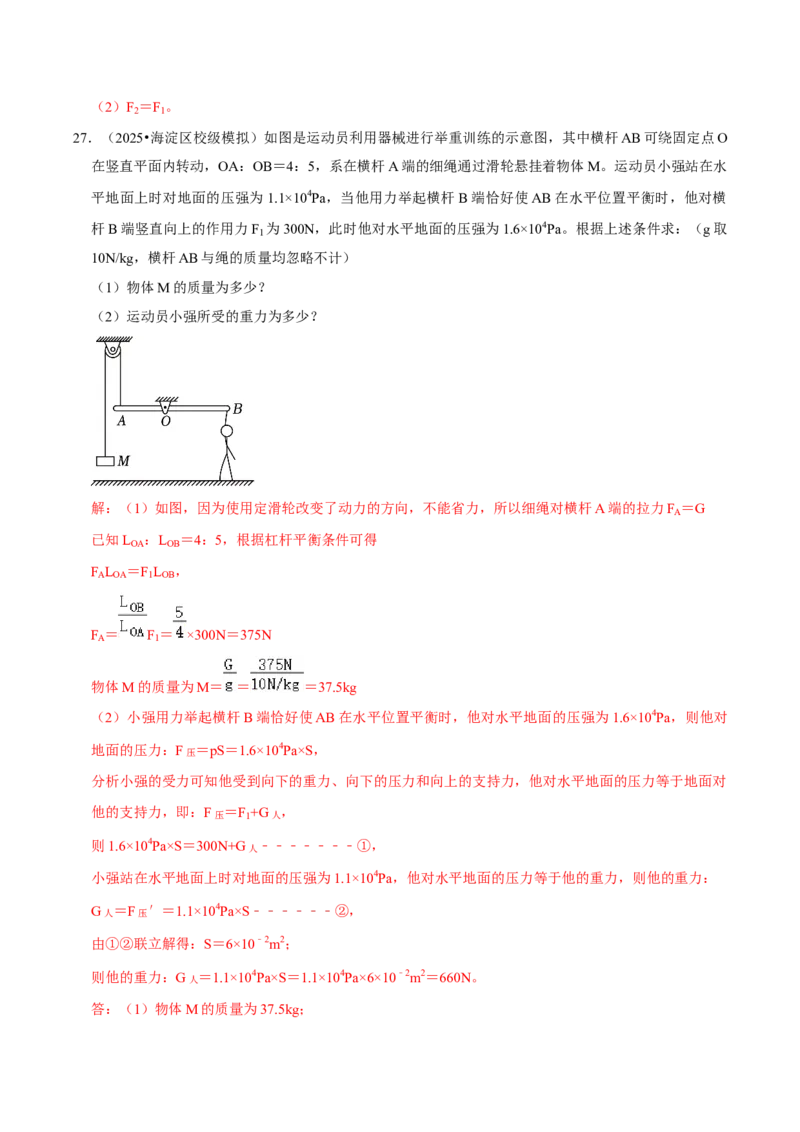
27.(2025•海淀区校级模拟)如图是运动员利用器械进行举重训练的示意图,其中横杆AB可绕固定点O
在竖直平面内转动,OA:OB=4:5,系在横杆A端的细绳通过滑轮悬挂着物体M。运动员小强站在水
平地面上时对地面的压强为1.1×104Pa,当他用力举起横杆B端恰好使AB在水平位置平衡时,他对横
杆B端竖直向上的作用力F 为300N,此时他对水平地面的压强为1.6×104Pa。根据上述条件求:(g取
1
10N/kg,横杆AB与绳的质量均忽略不计)
(1)物体M的质量为多少?
(2)运动员小强所受的重力为多少?
解:(1)如图,因为使用定滑轮改变了动力的方向,不能省力,所以细绳对横杆A端的拉力F =G
A
已知L :L =4:5,根据杠杆平衡条件可得
OA OB
F L =F L ,
A OA 1 OB
F = F = ×300N=375N
A 1
物体M的质量为M= = =37.5kg
(2)小强用力举起横杆B端恰好使AB在水平位置平衡时,他对水平地面的压强为1.6×104Pa,则他对
地面的压力:F压 =pS=1.6×104Pa×S,
分析小强的受力可知他受到向下的重力、向下的压力和向上的支持力,他对水平地面的压力等于地面对
他的支持力,即:F压 =F
1
+G人 ,
则1.6×104Pa×S=300N+G人 ﹣﹣﹣﹣﹣﹣﹣①,
小强站在水平地面上时对地面的压强为1.1×104Pa,他对水平地面的压力等于他的重力,则他的重力:
G人 =F压 ′=1.1×104Pa×S﹣﹣﹣﹣﹣﹣②,
由①②联立解得:S=6×10﹣2m2;
则他的重力:G人 =1.1×104Pa×S=1.1×104Pa×6×10﹣2m2=660N。
答:(1)物体M的质量为37.5kg;(2)运动员的体重为660N。
考点03 滑轮组机械效率的计算
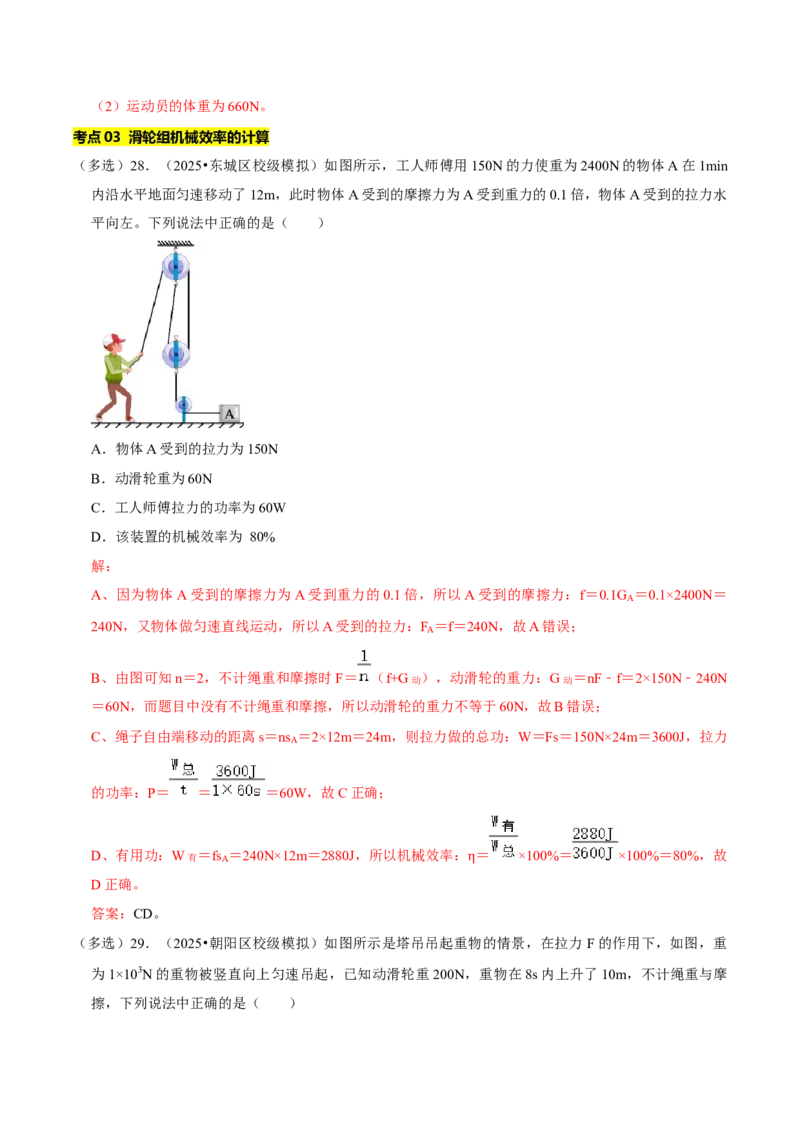
(多选)28.(2025•东城区校级模拟)如图所示,工人师傅用150N的力使重为2400N的物体A在1min
内沿水平地面匀速移动了12m,此时物体A受到的摩擦力为A受到重力的0.1倍,物体A受到的拉力水
平向左。下列说法中正确的是( )
A.物体A受到的拉力为150N
B.动滑轮重为60N
C.工人师傅拉力的功率为60W
D.该装置的机械效率为 80%
解:
A、因为物体A受到的摩擦力为A受到重力的0.1倍,所以A受到的摩擦力:f=0.1G =0.1×2400N=
A
240N,又物体做匀速直线运动,所以A受到的拉力:F =f=240N,故A错误;
A
B、由图可知n=2,不计绳重和摩擦时F= (f+G动 ),动滑轮的重力:G动 =nF﹣f=2×150N﹣240N
=60N,而题目中没有不计绳重和摩擦,所以动滑轮的重力不等于60N,故B错误;
C、绳子自由端移动的距离s=ns =2×12m=24m,则拉力做的总功:W=Fs=150N×24m=3600J,拉力
A
的功率:P= = =60W,故C正确;
D、有用功:W有 =fs
A
=240N×12m=2880J,所以机械效率: = ×100%= ×100%=80%,故
D正确。 η
答案:CD。
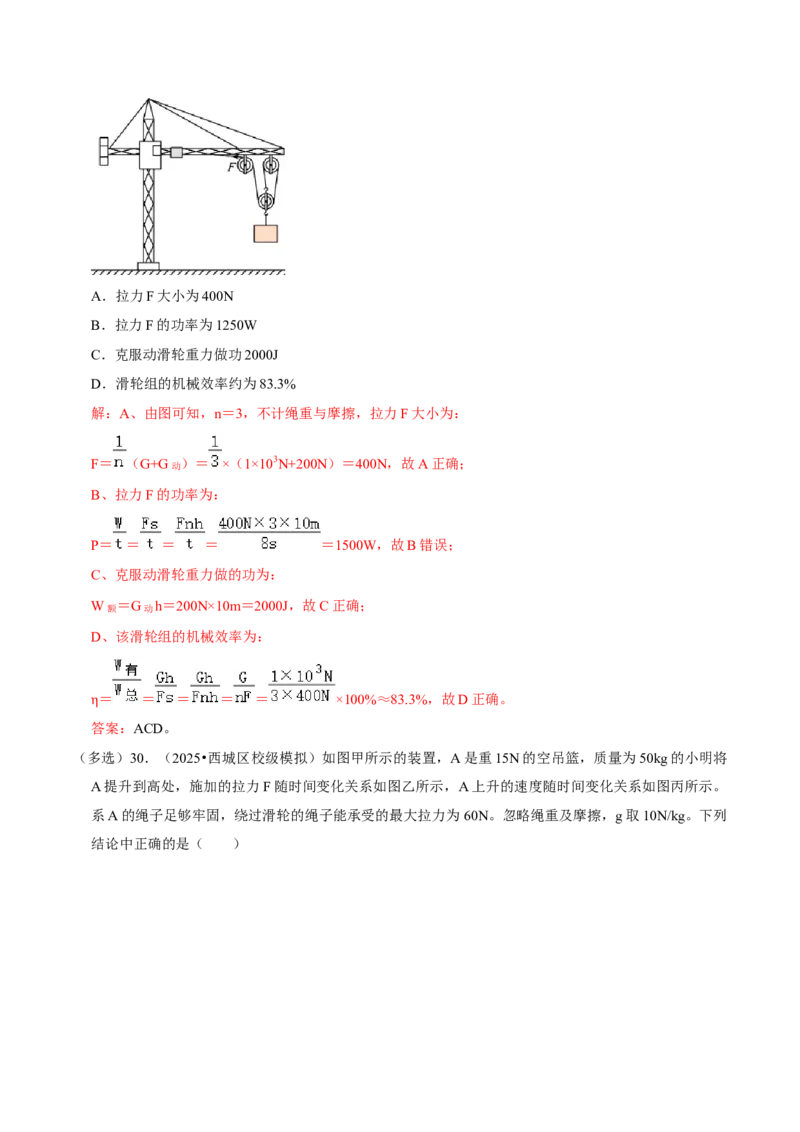
(多选)29.(2025•朝阳区校级模拟)如图所示是塔吊吊起重物的情景,在拉力 F的作用下,如图,重
为1×103N的重物被竖直向上匀速吊起,已知动滑轮重200N,重物在8s内上升了10m,不计绳重与摩
擦,下列说法中正确的是( )A.拉力F大小为400N
B.拉力F的功率为1250W
C.克服动滑轮重力做功2000J
D.滑轮组的机械效率约为83.3%
解:A、由图可知,n=3,不计绳重与摩擦,拉力F大小为:
F= (G+G动 )= ×(1×103N+200N)=400N,故A正确;
B、拉力F的功率为:
P= = = = =1500W,故B错误;
C、克服动滑轮重力做的功为:
W额 =G动h=200N×10m=2000J,故C正确;
D、该滑轮组的机械效率为:
= = = = = ×100%≈83.3%,故D正确。
η答案:ACD。
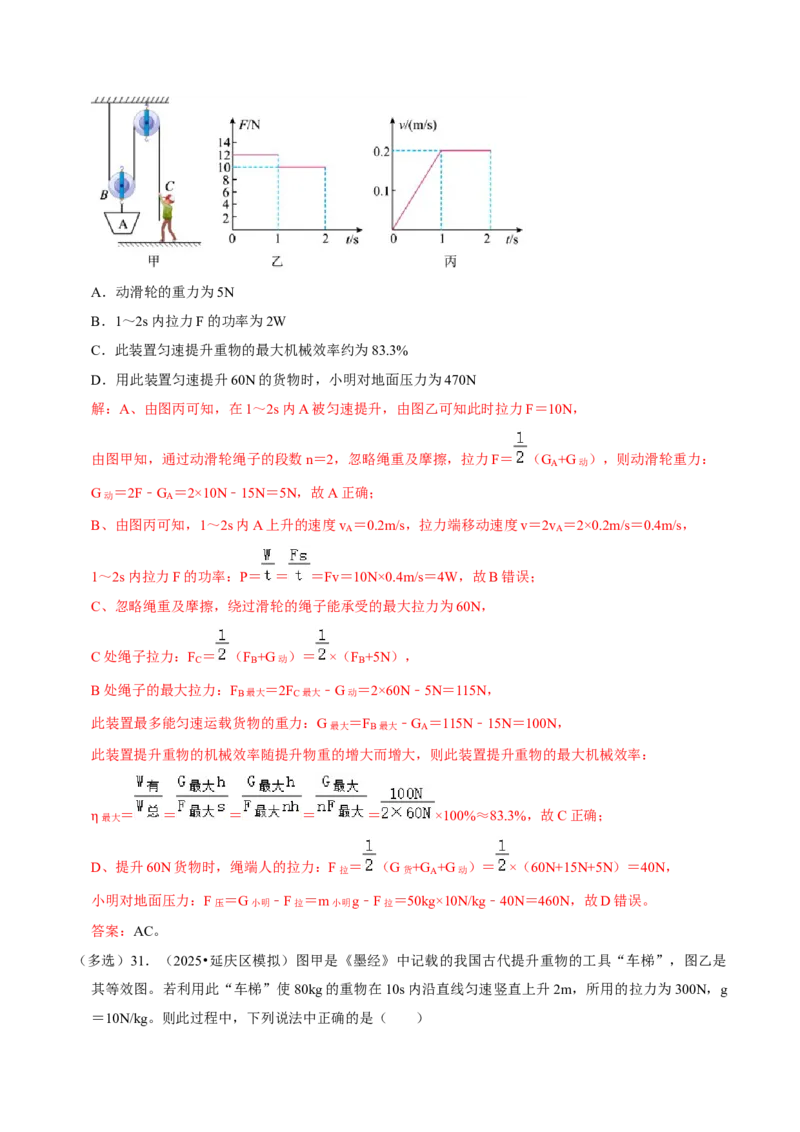
(多选)30.(2025•西城区校级模拟)如图甲所示的装置,A是重15N的空吊篮,质量为50kg的小明将
A提升到高处,施加的拉力F随时间变化关系如图乙所示,A上升的速度随时间变化关系如图丙所示。
系A的绳子足够牢固,绕过滑轮的绳子能承受的最大拉力为 60N。忽略绳重及摩擦,g取10N/kg。下列
结论中正确的是( )A.动滑轮的重力为5N
B.1~2s内拉力F的功率为2W
C.此装置匀速提升重物的最大机械效率约为83.3%
D.用此装置匀速提升60N的货物时,小明对地面压力为470N
解:A、由图丙可知,在1~2s内A被匀速提升,由图乙可知此时拉力F=10N,
由图甲知,通过动滑轮绳子的段数n=2,忽略绳重及摩擦,拉力F= (G
A
+G动 ),则动滑轮重力:
G动 =2F﹣G
A
=2×10N﹣15N=5N,故A正确;
B、由图丙可知,1~2s内A上升的速度v =0.2m/s,拉力端移动速度v=2v =2×0.2m/s=0.4m/s,
A A
1~2s内拉力F的功率:P= = =Fv=10N×0.4m/s=4W,故B错误;
C、忽略绳重及摩擦,绕过滑轮的绳子能承受的最大拉力为60N,
C处绳子拉力:F
C
= (F
B
+G动 )= ×(F
B
+5N),
B处绳子的最大拉力:F
B最大
=2F
C最大
﹣G动 =2×60N﹣5N=115N,
此装置最多能匀速运载货物的重力:G最大 =F
B最大
﹣G
A
=115N﹣15N=100N,
此装置提升重物的机械效率随提升物重的增大而增大,则此装置提升重物的最大机械效率:
最大
= = = = = ×100%≈83.3%,故C正确;
η
D、提升60N货物时,绳端人的拉力:F拉 = (G货+G
A
+G动 )= ×(60N+15N+5N)=40N,
小明对地面压力:F压 =G小明 ﹣F拉 =m小明g﹣F拉 =50kg×10N/kg﹣40N=460N,故D错误。
答案:AC。
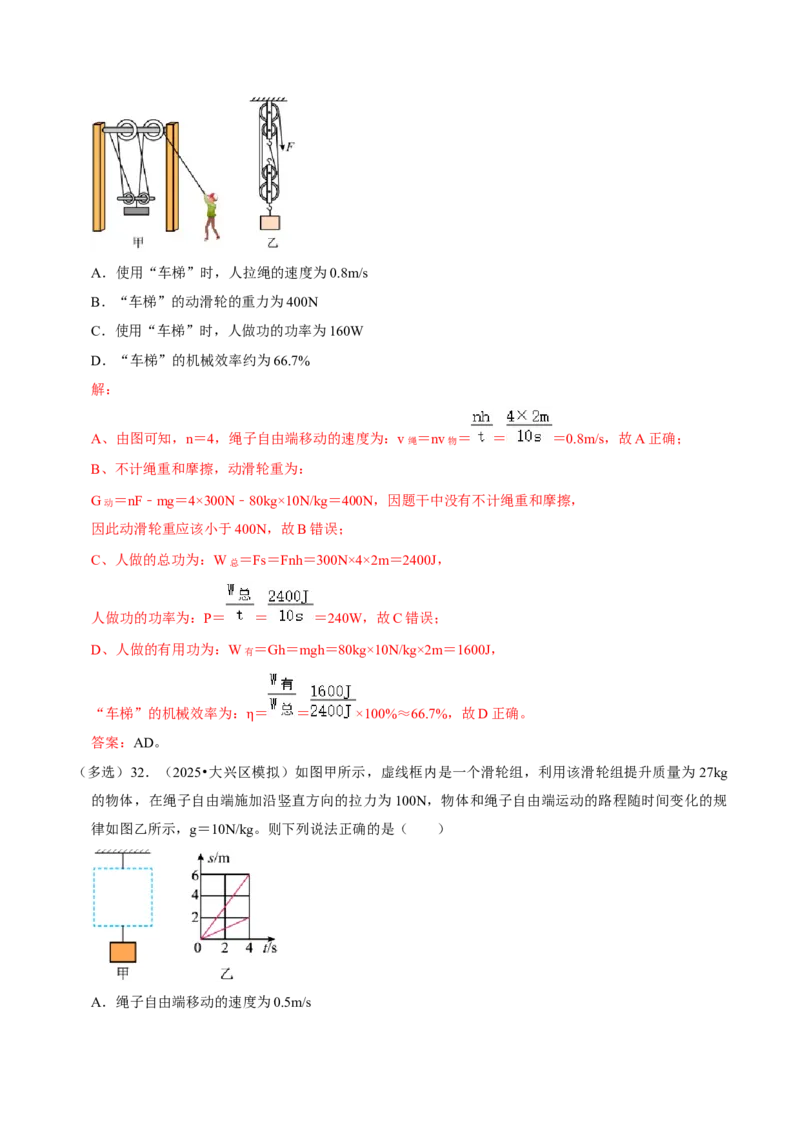
(多选)31.(2025•延庆区模拟)图甲是《墨经》中记载的我国古代提升重物的工具“车梯”,图乙是
其等效图。若利用此“车梯”使80kg的重物在10s内沿直线匀速竖直上升2m,所用的拉力为300N,g
=10N/kg。则此过程中,下列说法中正确的是( )A.使用“车梯”时,人拉绳的速度为0.8m/s
B.“车梯”的动滑轮的重力为400N
C.使用“车梯”时,人做功的功率为160W
D.“车梯”的机械效率约为66.7%
解:
A、由图可知,n=4,绳子自由端移动的速度为:v绳 =nv物 = = =0.8m/s,故A正确;
B、不计绳重和摩擦,动滑轮重为:
G动 =nF﹣mg=4×300N﹣80kg×10N/kg=400N,因题干中没有不计绳重和摩擦,
因此动滑轮重应该小于400N,故B错误;
C、人做的总功为:W总 =Fs=Fnh=300N×4×2m=2400J,
人做功的功率为:P= = =240W,故C错误;
D、人做的有用功为:W有 =Gh=mgh=80kg×10N/kg×2m=1600J,
“车梯”的机械效率为: = = ×100%≈66.7%,故D正确。
答案:AD。 η
(多选)32.(2025•大兴区模拟)如图甲所示,虚线框内是一个滑轮组,利用该滑轮组提升质量为 27kg
的物体,在绳子自由端施加沿竖直方向的拉力为100N,物体和绳子自由端运动的路程随时间变化的规
律如图乙所示,g=10N/kg。则下列说法正确的是( )
A.绳子自由端移动的速度为0.5m/sB.在4s内绳端拉力所做的功为300J
C.在4s内物体上升的距离为1m
D.该滑轮组的机械效率为90%
解:
A、由滑轮组的特点可知,滑轮组可以省力,但费距离,所以图乙中上面的倾斜直线是绳子自由端的 s
—t图像,而下面的倾斜直线是物体的 s—t图像。由图乙可知,t=4s时,绳子自由端移动的距离 s=
3m,则绳子自由端移动的速度为:
v= = =0.75m/s,故A错误;
B、在4s内绳端拉力所做的功为:
W总 =Fs=100N×3m=300J,故B正确;
CD、由图乙可知,t=4s时,绳子自由端移动的距离s=3m,物体上升的距离h=1m,根据s=nh可
知,绳子股数n= = =3,该滑轮组的机械效率为:
= = = = = = ×100%=90%,故CD正确。
η答案:BCD。
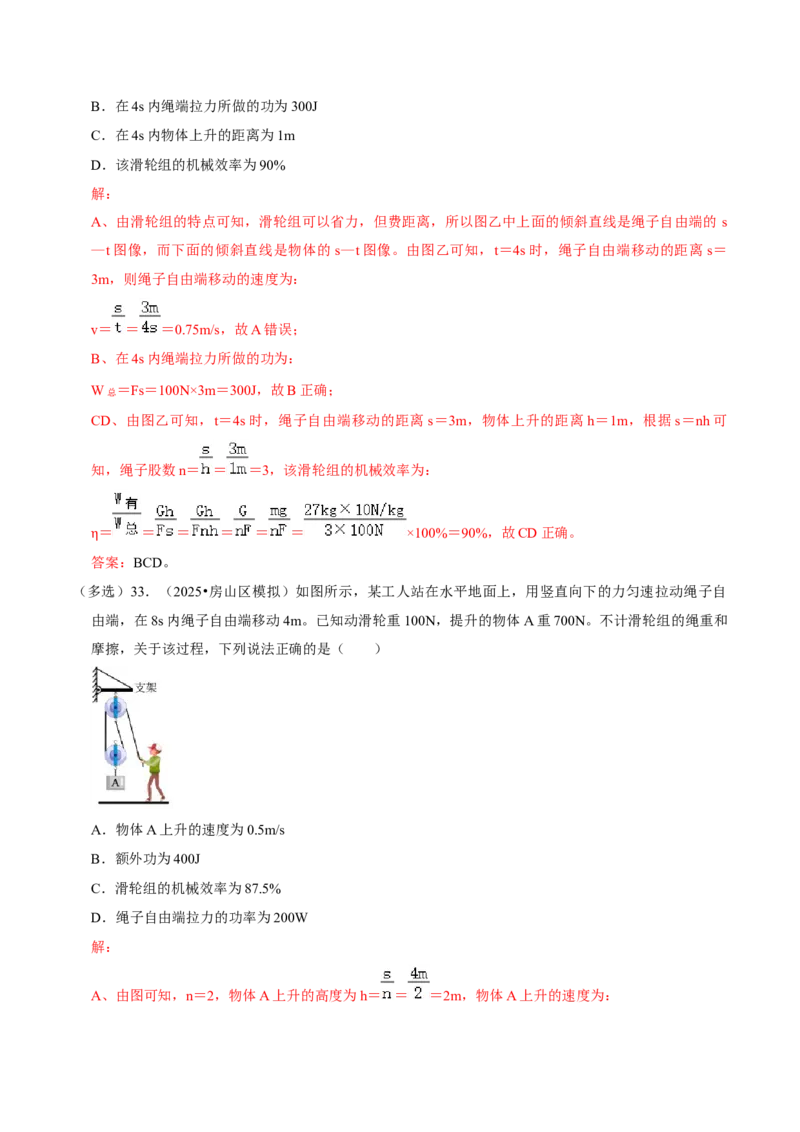
(多选)33.(2025•房山区模拟)如图所示,某工人站在水平地面上,用竖直向下的力匀速拉动绳子自
由端,在8s内绳子自由端移动4m。已知动滑轮重100N,提升的物体A重700N。不计滑轮组的绳重和
摩擦,关于该过程,下列说法正确的是( )
A.物体A上升的速度为0.5m/s
B.额外功为400J
C.滑轮组的机械效率为87.5%
D.绳子自由端拉力的功率为200W
解:
A、由图可知,n=2,物体A上升的高度为h= = =2m,物体A上升的速度为:v= = =0.25m/s,故A错误;
B、不计滑轮组的绳重和摩擦,克服动滑轮重做的功为额外功,则额外功为:
W额 =G动h=100N×2m=200J,故B错误;
C、不计滑轮组的绳重和摩擦,滑轮组的机械效率为:
= = = = = ×100%=87.5%,故C正确;
ηD、不计滑轮组的绳重和摩擦,拉力做的总功为:
W总 =(G+G动 )h=(700N+100N)×2m=1600J,
绳子自由端拉力的功率为:P= = =200W,故D正确。
答案:CD。
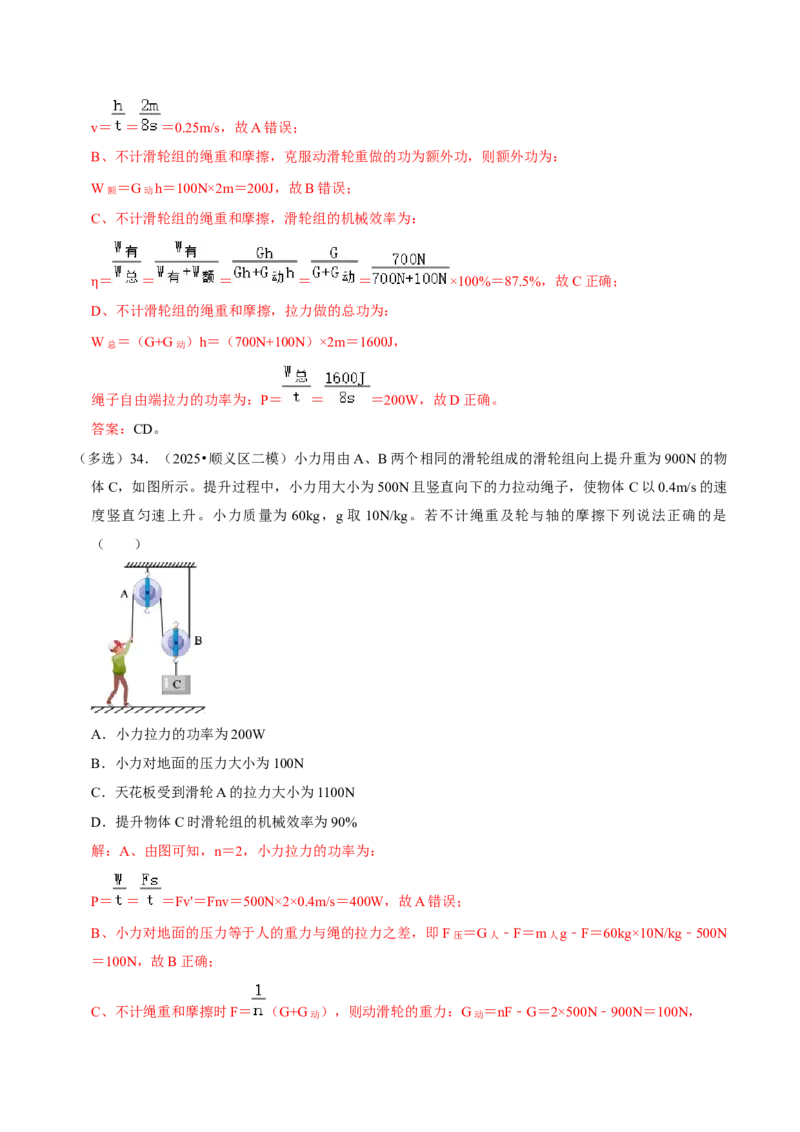
(多选)34.(2025•顺义区二模)小力用由A、B两个相同的滑轮组成的滑轮组向上提升重为900N的物
体C,如图所示。提升过程中,小力用大小为500N且竖直向下的力拉动绳子,使物体C以0.4m/s的速
度竖直匀速上升。小力质量为 60kg,g取10N/kg。若不计绳重及轮与轴的摩擦下列说法正确的是
( )
A.小力拉力的功率为200W
B.小力对地面的压力大小为100N
C.天花板受到滑轮A的拉力大小为1100N
D.提升物体C时滑轮组的机械效率为90%
解:A、由图可知,n=2,小力拉力的功率为:
P= = =Fv'=Fnv=500N×2×0.4m/s=400W,故A错误;
B、小力对地面的压力等于人的重力与绳的拉力之差,即F压 =G人 ﹣F=m人g﹣F=60kg×10N/kg﹣500N
=100N,故B正确;
C、不计绳重和摩擦时F= (G+G动 ),则动滑轮的重力:G动 =nF﹣G=2×500N﹣900N=100N,天花板受到滑轮A的拉力:F拉 =2F+G动 =2×500N+100N=1100N,故C正确;
D、该滑轮组的机械效率为:
= = = = = ×100%=90%,故D正确。
η答案:BCD。
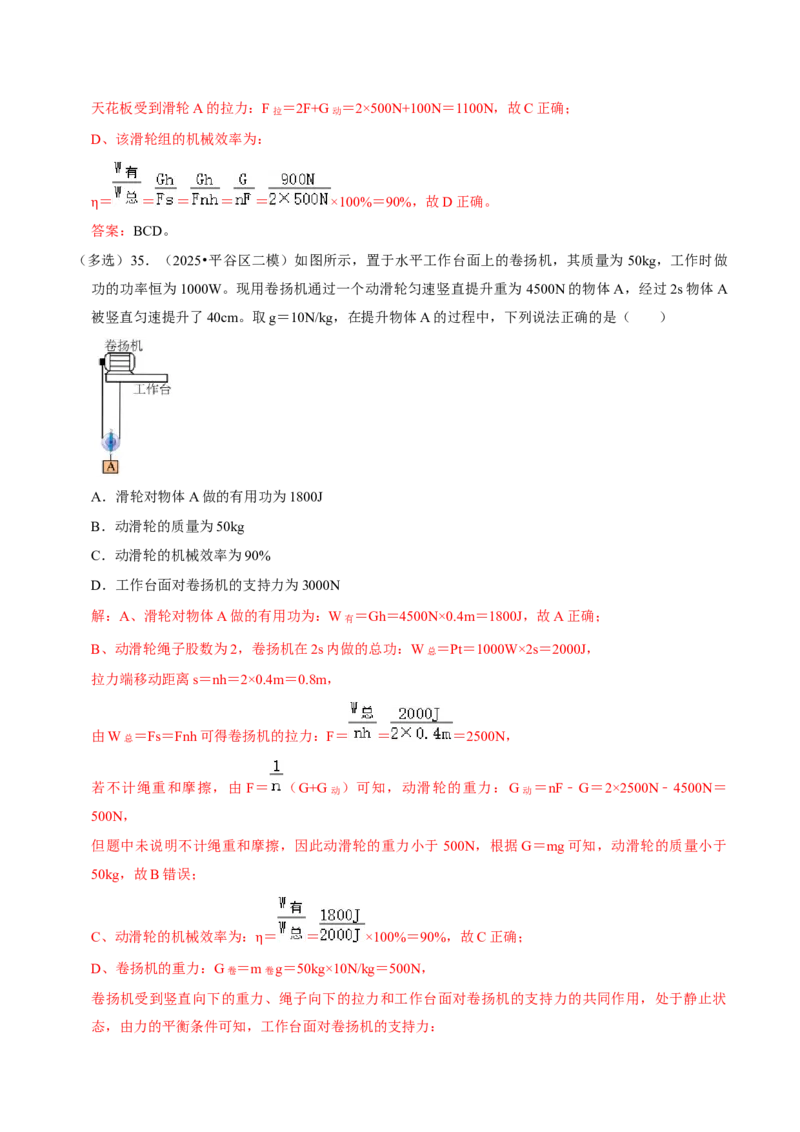
(多选)35.(2025•平谷区二模)如图所示,置于水平工作台面上的卷扬机,其质量为 50kg,工作时做
功的功率恒为1000W。现用卷扬机通过一个动滑轮匀速竖直提升重为 4500N的物体A,经过2s物体A
被竖直匀速提升了40cm。取g=10N/kg,在提升物体A的过程中,下列说法正确的是( )
A.滑轮对物体A做的有用功为1800J
B.动滑轮的质量为50kg
C.动滑轮的机械效率为90%
D.工作台面对卷扬机的支持力为3000N
解:A、滑轮对物体A做的有用功为:W有 =Gh=4500N×0.4m=1800J,故A正确;
B、动滑轮绳子股数为2,卷扬机在2s内做的总功:W总 =Pt=1000W×2s=2000J,
拉力端移动距离s=nh=2×0.4m=0.8m,
由W总 =Fs=Fnh可得卷扬机的拉力:F= = =2500N,
若不计绳重和摩擦,由 F= (G+G动 )可知,动滑轮的重力:G动 =nF﹣G=2×2500N﹣4500N=
500N,
但题中未说明不计绳重和摩擦,因此动滑轮的重力小于 500N,根据G=mg可知,动滑轮的质量小于
50kg,故B错误;
C、动滑轮的机械效率为: = = ×100%=90%,故C正确;
D、卷扬机的重力:G卷 =mη卷g=50kg×10N/kg=500N,
卷扬机受到竖直向下的重力、绳子向下的拉力和工作台面对卷扬机的支持力的共同作用,处于静止状
态,由力的平衡条件可知,工作台面对卷扬机的支持力:F支 =G卷+F=500N+2500N=3000N,故D正确。
答案:ACD。
