 夜雨聆风
夜雨聆风





第4期 | 模板编辑器介绍(下)
本期内容
一、参数
二、测试
三、夹具界面

一、参数
AURORA
调整工件识别参数。
软件识别工件是使用导入的点云图来配比相机拍摄出来的点云图,在不做任何参数勾选识别时只会进行一次粗定位。
功能勾选:可生成一个长方体(绿色),用来检测长方体内部是否超标,若超过设置点云数,则不识别该位置。
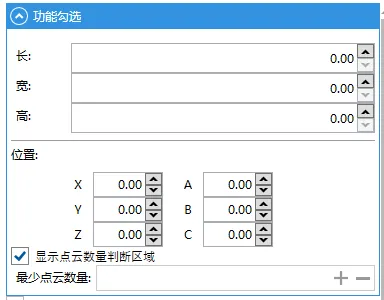
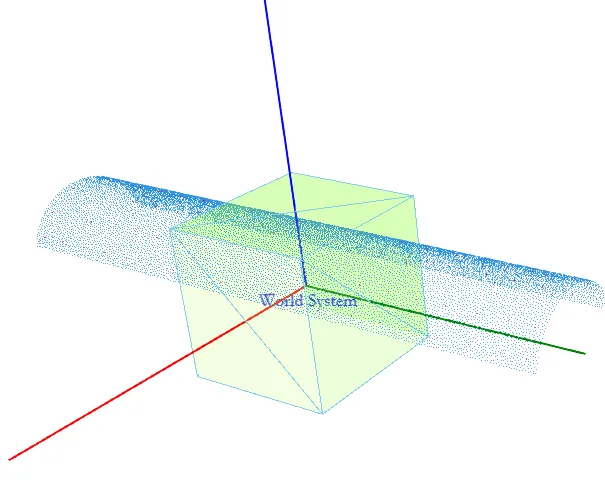
显示点云数量判断区域:显示/隐藏长方体
最少点云数量:设置最小点云数

固定角度:在机器人触发拍照匹配时会生效;匹配时会在最佳匹配度结果的情况下,使模板坐标系距离机器人坐标系偏差最近的轴平行;可理解为在固定来料区内会限制匹配角度。
固定Z方向:强行将模板匹配结果Z方向与机器人Z方向同向。
使用ICP:默认勾选,先使用采样点粗定位,再在粗定位基础上使用采样点精定位。
高精度:粗定位后使用模板整体点云精定位,但是处理时间会加长。
处理对称模型:匹配一次之后,旋转180°再匹配一次。
点云切割:使用深度学习进行图像分割;
使用二维粗定位:使用点云映射图进行粗定位;

隐藏参数调试
点击后需输入密码(spark)

采样距离间隔:模型采样点采样间距,每隔__毫米提取一个采样点。
填写建议:调整采样点距离至可看出产品轮廓即可;采样点数量对匹配速度影响较大,不建议与模板过度贴合。
模型采样率:用导入工件的__%进行匹配。
填写建议:不建议低于0.6。
点云采样率:用拍摄出点云的__%进行匹配。
填写建议:不建议低于0.6。
模板特征提取率:模型和点云采样过后进行识别的匹配比例。
填写建议:观察点云图像在所作模板中占比,建议在0.6~0.95之间。
示 例:若实际产品为浇铸产品,模板为标准数模转换,产品上可能会有未切除平整的冒口、气孔等,则应减小相对的占比;若占比过高,则应当考虑重新制作对应模板。
若实际产品为机加工产品,部分加工表明过于光滑反光,影响着相机成像,则应减小相对的占比;若占比过高,则应当考虑调整相机参数。
最小允许匹配率:最低匹配阈值,低于所填入百分比的将不显示匹配结果。
填写建议:可以先将该参数调制0.01尝试找出匹配准的最低阈值,将该阈值适当提高后填入。
示 例:若匹配结果低于0.5的情况开始出现匹配错位,则应填取0.6以上为好,具体需要实际测试得到稳定的阈值。
允许距离偏差:模型中的每个点在该数值的范围内有实际点云则认为匹配到。
填写建议:模型点云与拍摄点云之间差异,默认为2,建议在1~3以内,太低不满足误差冗余,太高会出现匹配不准。
示 例:若该工件受热胀冷缩影响较大,则该值可适当放大缩小,若过大则建议建立多个模板。
网格大小:模型采样点匹配最小间距(粗定位间距)。
填写建议:在相机正常拍照姿态下,工件面对相机方向最小尺寸的一半。
示 例:若一长方体工件长宽高分别为100、50、10,最大面为放置面,相机从上至下拍摄工件,则应填为25左右;若为0则可能会出现所有模型采样点匹配聚集在一起。
最多识别数量:最多模型采样点匹配数量上限。
填写建议:可默认填写20。
最近产品距离:匹配结果之间的距离限制。
填写建议:建议高于产品最小尺寸。
注:未说明参数请保持默认设置

生成模型:保存按键,所有参数修改均需点击生成模型按键

二、测试
AURORA
进行识别测试。

相机ID:
触发相机拍照:触发相机拍照传输点云至Aurora
加载点云文件:加载保存好的点云
显示点云:显示/隐藏点云
保存点云:保存触发相机拍照拍摄的点云图
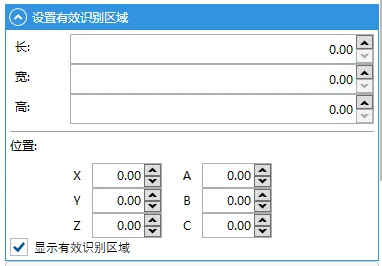
设置有效识别区域:设置工作区域,软件只会识别这个区域内的点云,会加快识别速度



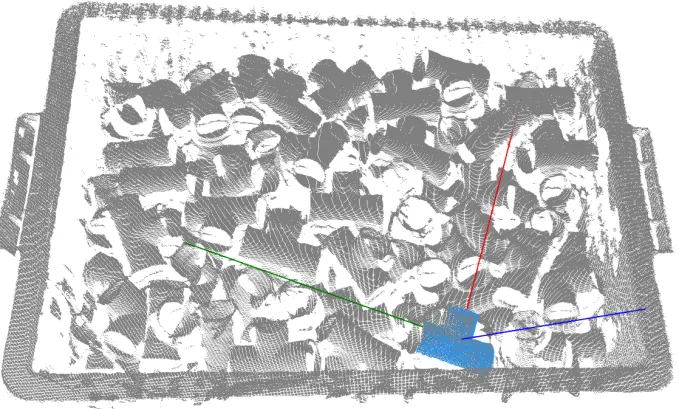
测试:点击测试后软件会进行识别,会将导入的产品点云(蓝色)移动到导入/拍摄的点云图上(灰色),并在功能设置区下方出现识别出来的点位

三、夹具界面
AURORA
设置抓取点

TCP:机器人TCP坐标
坐标系:可以通过调节世界坐标系和工具坐标系来调整工具至合适的抓取位置
ID:可设置抓取点ID,机器人赋值变量UsePickID可使用对应ID抓取点
优先级:可将抓取点设置优先等级,均可抓取状态时优先发送高等级抓取点
保存位置:调整完毕后需点击保存位置进行保存

连续抓取点:可一次设置多个抓取点
通过设置X、Y、Z、A、B、C偏移量,偏移个数N,基准坐标系,点击 图中“1”进行模拟仿真,点击 图中“2” 添加仿真的所有抓取点。
保存抓取文件:将下方抓取点生成抓取文件
逼近点方向:设置10.1抓取路径中轨迹点4的偏移方向