
文档内容
模板 07 机械能守恒定律(五大题型)
本节导航:
题型01 机车启动问题 题型02 动能定理在多过程和往复运动问题的应用
题型03 机械能守恒定律的四类应用 题型04 机械能守恒定律在曲线运动中的运用
题型05 功能关系在两种模型的应用
题型 01 机车启动问题
此运动问题具有收尾速度,常以生活中的具体场景为命题角度,综合考查受力分析、运动分析、功和
功率、牛顿运动定律、动能定理等知识,学生们需掌握推理能力、综合分析能力和应用数学知识解决物理
问题的能力。
一、必备基础知识
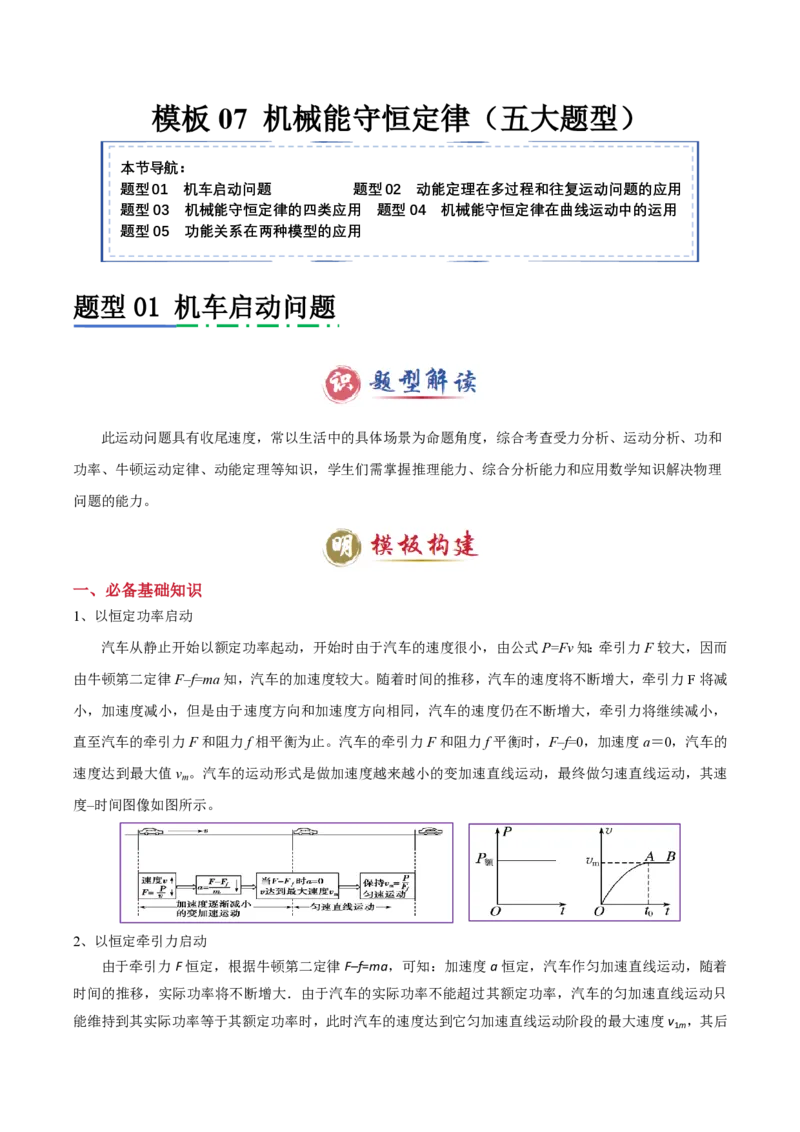
1、以恒定功率启动
汽车从静止开始以额定功率起动,开始时由于汽车的速度很小,由公式P=Fv知:牵引力F较大,因而
由牛顿第二定律F–f=ma知,汽车的加速度较大。随着时间的推移,汽车的速度将不断增大,牵引力F将减
小,加速度减小,但是由于速度方向和加速度方向相同,汽车的速度仍在不断增大,牵引力将继续减小,
直至汽车的牵引力F和阻力f相平衡为止。汽车的牵引力F和阻力f平衡时,F–f=0,加速度a=0,汽车的
速度达到最大值v 。汽车的运动形式是做加速度越来越小的变加速直线运动,最终做匀速直线运动,其速
m
度–时间图像如图所示。
2、以恒定牵引力启动
由于牵引力F恒定,根据牛顿第二定律F–f=ma,可知:加速度a恒定,汽车作匀加速直线运动,随着
时间的推移,实际功率将不断增大.由于汽车的实际功率不能超过其额定功率,汽车的匀加速直线运动只
能维持到其实际功率等于其额定功率时,此时汽车的速度达到它匀加速直线运动阶段的最大速度v ,其后
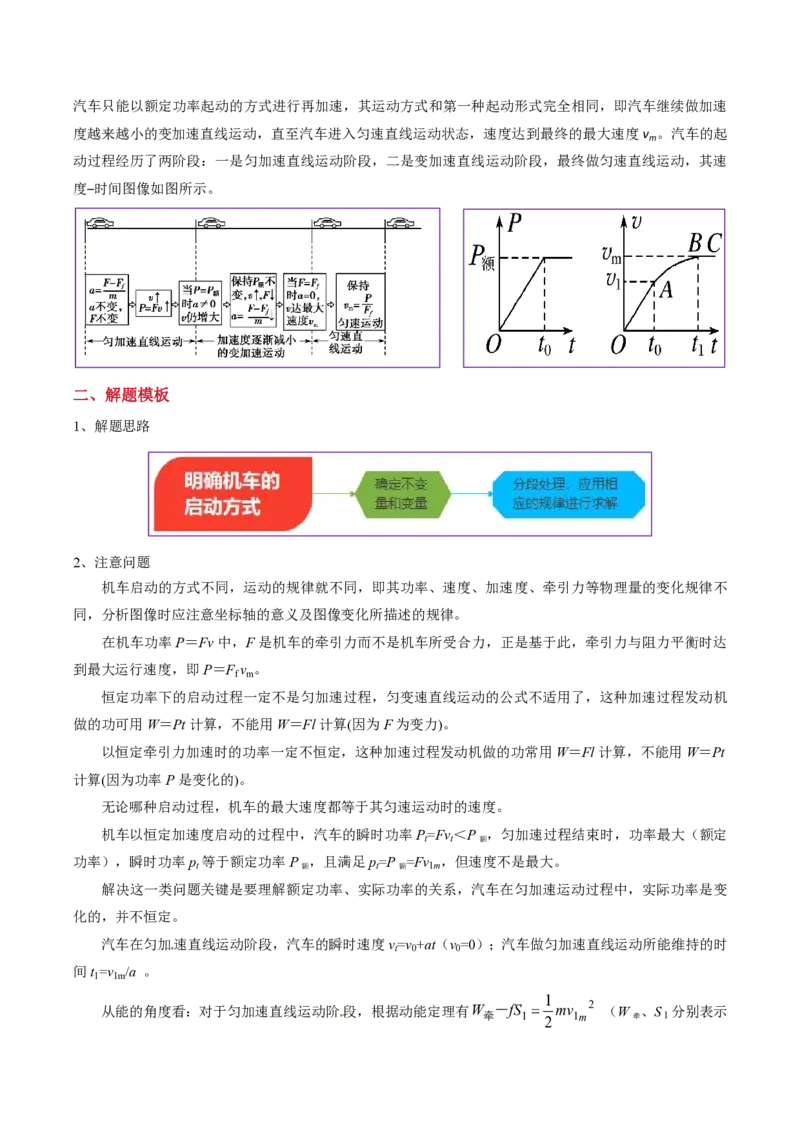
1m汽车只能以额定功率起动的方式进行再加速,其运动方式和第一种起动形式完全相同,即汽车继续做加速
度越来越小的变加速直线运动,直至汽车进入匀速直线运动状态,速度达到最终的最大速度v 。汽车的起
m
动过程经历了两阶段:一是匀加速直线运动阶段,二是变加速直线运动阶段,最终做匀速直线运动,其速
度–时间图像如图所示。
二、解题模板
1、解题思路
2、注意问题
机车启动的方式不同,运动的规律就不同,即其功率、速度、加速度、牵引力等物理量的变化规律不
同,分析图像时应注意坐标轴的意义及图像变化所描述的规律。
在机车功率P=Fv中,F是机车的牵引力而不是机车所受合力,正是基于此,牵引力与阻力平衡时达
到最大运行速度,即P=F v 。
f m
恒定功率下的启动过程一定不是匀加速过程,匀变速直线运动的公式不适用了,这种加速过程发动机
做的功可用W=Pt计算,不能用W=Fl计算(因为F为变力)。
以恒定牵引力加速时的功率一定不恒定,这种加速过程发动机做的功常用W=Fl计算,不能用W=Pt
计算(因为功率P是变化的)。
无论哪种启动过程,机车的最大速度都等于其匀速运动时的速度。
机车以恒定加速度启动的过程中,汽车的瞬时功率P=Fv<P ,匀加速过程结束时,功率最大(额定
t t 额
功率),瞬时功率p 等于额定功率P ,且满足p=P =Fv ,但速度不是最大。
t 额 t 额 1m
解决这一类问题关键是要理解额定功率、实际功率的关系,汽车在匀加速运动过程中,实际功率是变
化的,并不恒定。
汽车在匀加速直线运动阶段,汽车的瞬时速度v=v +at(v =0);汽车做匀加速直线运动所能维持的时
t 0 0
间t =v /a 。
1 1m
1
从能的角度看:对于匀加速直线运动阶段,根据动能定理有W -fS mv 2 (W 、S 分别表示
牵 1 2 1m 牵 1匀加速运动阶段牵引力所做的功、位移 ),变加速直线运动阶段牵引力所做的功W' = P t (t 表示变加
牵 额 2 2
速直线运动阶段所经历的时间),W -fS 1 mv 2 1 mv 2 (S 为变加速直线运动阶段的位移)。
牵 2
2
m
2
1m 2
3、解题方法
机车启动问题中几个物理量的求法:
在用公式P=Fv计算机车的功率时,F是指机车的牵引力而不是机车所受到的合力,也不是阻力。
恒定功率下的加速一定不是匀加速,这种加速过程发动机做的功可用W=Pt计算,不能用W=Fl计算
(因为F是变力)。
以恒定牵引力加速时的功率一定不恒定,这种加速过程发动机做的功常用W=Fl计算,不能用W=Pt
计算(因为功率P是变化的)。
匀加速过程结束时机车的速度并不是最后的最大速度。因为此时F>F ,所以之后还要在功率不变的情
阻
况下变加速一段时间才达到最后的最大速度v 。
m
P F-F
f
瞬时加速度的求法:据F= 求出牵引力,则加速度a= 。
v m
三个重要的关系式:
P P
无论哪种启动过程,机车的最大速度都等于其匀速运动时的速度,即 v (式中F 为
m F F min
min 阻
最小牵引力,其值等于阻力F )。
阻
P额 v′
m
匀加速启动持续时间的求法:牵引力F=ma+F,匀加速的最后速度v′ = ,时间t= 。匀加
f m
ma+F a
f
P P
速过程结束时,功率最大(额定功率),速度不是最大,即v= <v = 。
m
F F阻
机车以恒定功率运行时,牵引力做的功W=Pt。由动能定理:Pt-F x=ΔE .此式经常用于求解机车
阻 k
以恒定功率启动过程的位移大小。
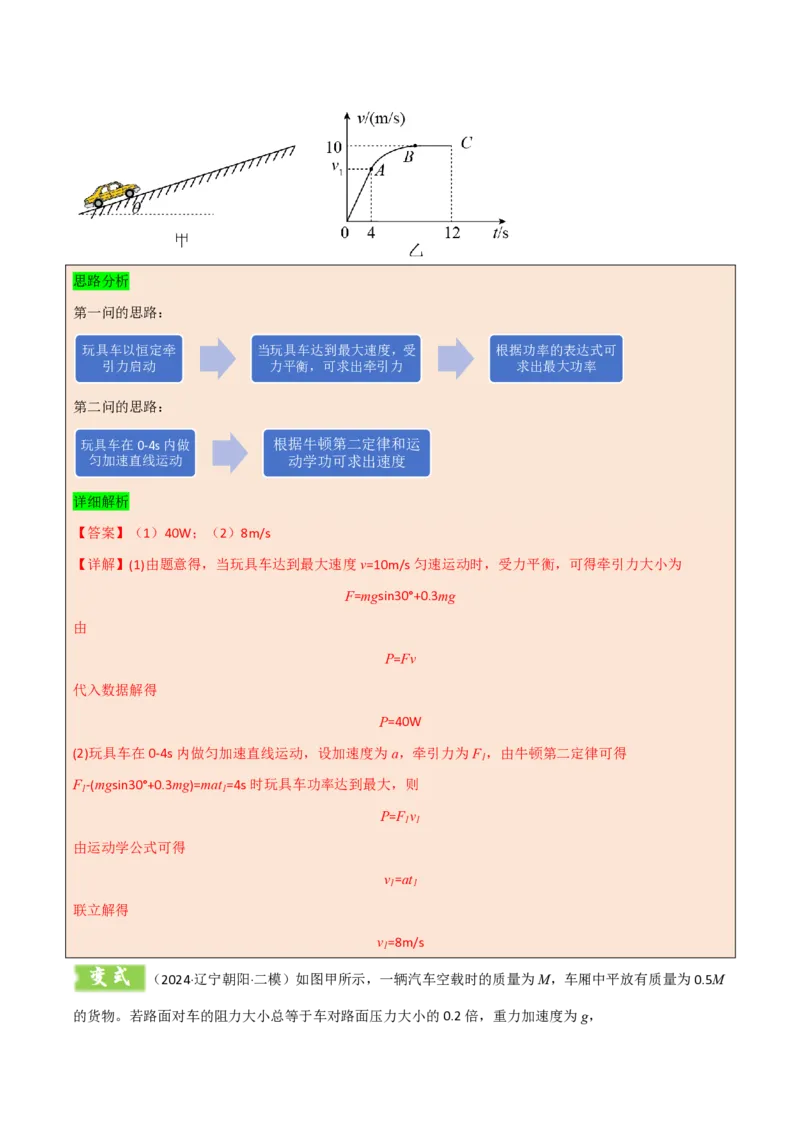
(2024高三上·广东中山·期中)一质量为m=0.5kg的电动玩具车,从倾角为=30°的长直轨道底
端,由静止开始沿轨道向上运动,4s末功率达到最大值,之后保持该功率不变继续运动,运动的v-t图像如
图所示,其中AB段为曲线,其他部分为直线。已知玩具车运动过程中所受摩擦阻力恒为自身重力的0.3倍,
空气阻力不计,取重力加速度g=10m/s2。
(1)求玩具车运动过程中的最大功率P;
(2)求玩具车在4s末时(图中A点)的速度大小v 。
1思路分析
第一问的思路:
玩具车以恒定牵 当玩具车达到最大速度,受 根据功率的表达式可
引力启动 力平衡,可求出牵引力 求出最大功率
第二问的思路:
玩具车在0-4s内做 根据牛顿第二定律和运
匀加速直线运动 动学功可求出速度
详细解析
【答案】(1)40W;(2)8m/s
【详解】(1)由题意得,当玩具车达到最大速度v=10m/s匀速运动时,受力平衡,可得牵引力大小为
F=mgsin30°+0.3mg
由
P=Fv
代入数据解得
P=40W
(2)玩具车在0-4s内做匀加速直线运动,设加速度为a,牵引力为F ,由牛顿第二定律可得
1
F -(mgsin30°+0.3mg)=mat =4s时玩具车功率达到最大,则
1 1
P=F v
1 1
由运动学公式可得
v =at
1 1
联立解得
v =8m/s
1
(2024·辽宁朝阳·二模)如图甲所示,一辆汽车空载时的质量为M,车厢中平放有质量为0.5M
的货物。若路面对车的阻力大小总等于车对路面压力大小的0.2倍,重力加速度为g,sin110.19,cos110.98。
(1)当汽车以功率P在平直路面上匀速行驶时,求汽车速度是多大?
(2)保持功率不变,汽车开上一个倾角为11的斜坡,若刚驶上斜坡时的速度大小同第(1)问,求此时车
的加速度和车厢对货物的摩擦力?
(3)汽车在斜坡上经过时间Δt又达到速度v 匀速行驶,在乙图中试画出汽车上坡Δt过程中的运动图像。
2
10P
【答案】(1) ;(2)0.186g,方向沿斜面向下,0.002Mg,方向沿斜面向上;(3)见解析
3Mg
【详解】(1)汽车匀速行驶
F f
1 1
又
f kM 0.5Mg
1
汽车功率
PFv
1 1
可解得
10P
v
1 3Mg
(2)汽车刚上坡,功率和速率都不变,则牵引力大小也不变,对整体根据牛顿第二定律,有
M 0.5MgsinkM 0.5MgcosF M 0.5Ma
1
解得
a0.186g
方向沿斜面向下,对货物,根据牛顿第二定律,有
0.5Mgsin f 0.5Ma
2
解得
f 0.002Mg
2
方向沿斜面向上;(3)上坡过程中,速度减小,根据PFv可知牵引力增大,速度越来越小,则牵引力越来越大,根据牛顿
第二定律可知加速度越来越小,直到牵引力的大小与重力沿斜面分力和阻力之和相等时,汽车做匀速直线
运动,所以汽车做加速度减小的减速运动,上坡过程中的vt图如图所示
题型 02 动能定理在多过程和往复运动问题的应用
1、有些物体运动过程可以分为几个不同阶段,如直线与曲线运动组合、含有弹簧的物体多过程运动等,
这类问题一般不涉及求时间,这样的情景的题目选用动能定理可以快捷有效的求解。
2、有些物体的运动过程具有重复性、往返性,求解这类问题时若运用牛顿运动定律及运动学公式将非
常繁琐,甚至无法解出。而动能定理只关心物体的初、末状态而不计运动过程的细节,所以用动能定理分
析这类问题可迎刃而解。
一、必备基础知识
1、动能定理
内容:力在一个过程中对物体做的功,等于物体在这个过程中动能的变化。
1 1
表达式:W= mv 2- mv 2。
2 1
2 2
适用条件:动能定理既适用于直线运动,也适用于曲线运动;既适用于恒力做功,也适用于变力做功;
力可以是各种性质的力,既可以同时作用,也可以不同时作用。
优先应用动能定理的问题:①不涉及加速度、时间的问题;②有多个物理过程且不需要研究整个过程
中的中间状态的问题;③变力做功的问题;④含有F、l、m、v、W、E 等物理量的力学问题。
k
2、多过程问题
很多动力学问题中涉及研究对象有两个或多个连续的运动过程,在物体不同的运动阶段,物体的运动
情况和受力情况都发生了变化,我们把这类问题称为多过程问题。多运动组合问题主要是指直线运动、平
抛运动和竖直面内圆周运动的组合问题。由于多过程问题的受力情况、运动情况比较复杂,从动力学的角度分析多过程问题往往比较复杂,但
是,用动能定理分析问题,是从总体上把握其运动状态的变化,并不需要从细节上了解。因此,动能定理
的优越性就明显地表现出来了,分析力的作用是看力做的功,也只需把所有的力做的功累加起来即可。
3、多过程问题解题测量和技巧
策略:①应用牛顿运动定律和动能定理解决多过程问题。若问题涉及时间、加速度、力等,一般要用
牛顿运动定律与运动学公式结合求解;若问题只涉及位移、速度、力等一般可用动能定理求解,用动能定
理求解一般比用牛顿运动定律求解简单。
②用动力学和能量观点解决多过程问题。若运动过程无摩擦等机 械能向其它形式能转化的现象,可考
虑用机械能守恒;若运动过程涉及摩擦生热等现象可用功能关系列能量守恒关系式。
4、往复运动问题
有些问题中物体的运动过程具有重复性、往返性,而描述运动的物理量多数是变化的,且重复次数又
往往是无限的或者很难确定。求解这类问题时若运用牛顿运动定律及运动学公式将非常繁琐,甚至无法解
出。而动能定理只关心物体的初、末状态而不计运动过程的细节,所以用动能定理分析这类问题可迎刃而
解。
二、解题模板
1、解题思路
解题的关键:①抓住物理情景中出现的运动状态和运动过程,观察每一个过程的特征和寻找过程之间
的联系是求解多过程问题的两个关键,将物理过程分解成几个简单子过程。②两个相邻过程连接点的速度
是联系两过程的纽带,也是解题的关键.很多情况下平抛运动的末速度的方向是解题的重要突破口。
2、注意问题
对于多个物理过程要仔细分析,将复杂的过程分割成一个个子过程,分别对每个过程进行分析,得出
每个过程遵循的规律,当每个过程都可以运用动能定理时,可以选择分段或全程应用动能定理。物体所受
的力在哪段位移上做功,哪些力做功,做正功还是负功,然后再正确写出总功。
全程应用动能定理解题求功时,有些力不是全过程都作用的,必须根据不同的情况分别对待,弄清楚
物体所受的力在哪段位移上做功,哪些力做功,做正功还是负功,然后再正确写出总功。
不适用动能定理求解全过程的情况:若题目需要求某一中间物理量,应分阶段应用动能定理;物体在多个运动过程中,受到的弹力、摩擦力等力若发生了变化,力在各个过程中做功情况也不同,不宜全过程
应用动能定理,可以研究其中一个或几个分过程,结合动能定理,各个击破。
对于物体运动过程中有往复运动的情况,物体所受的滑动摩擦力、空气阻力等大小不变,方向发生变
化,但在每一段上这类力均做负功,而且这类力所做的功等于力和路程的乘积,与位移无关。若题目中涉
及求解物体运动的路程或位置的变化,可利用动能定理求出摩擦力做的功,然后进一步确定物体运动的路
程或位置的变化。
3、解题方法
利用动能定理求解多过程问题的方法:①弄清物体的运动由哪些过程组成;②分析每个过程中物体的
受力情况;③各个力做功有何特点,对动能的变化有无影响;④从总体上把握全过程,表达出总功,找出
初、末状态的动能;⑤对所研究的全过程运用动能定理列方程。
应用动能定理求解往复运动问题的方法:要确定物体的初状态和最终状态,如重力做功与物体运动路
径无关,可用W =mgh直接求解;滑动摩擦力做功与物体运动路径有关,其功的大小可用W=-Fs求解,
G f f
其中s为物体滑行的路程。
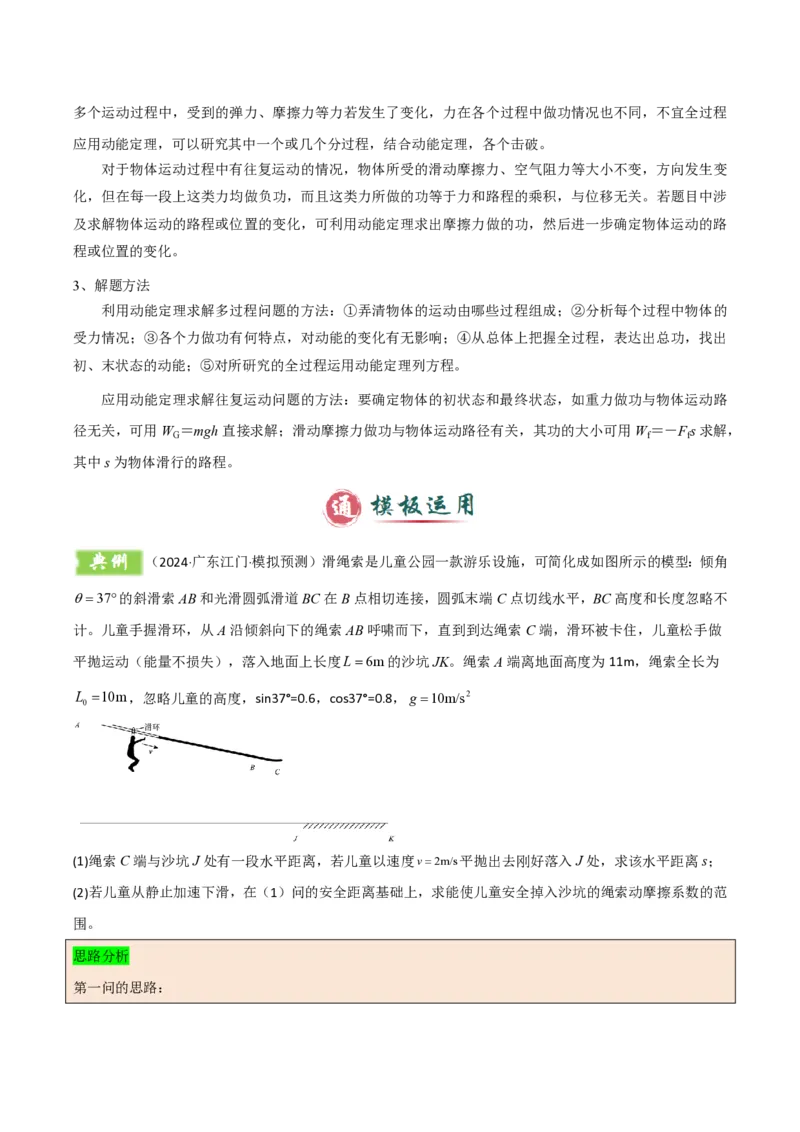
(2024·广东江门·模拟预测)滑绳索是儿童公园一款游乐设施,可简化成如图所示的模型:倾角
37的斜滑索AB和光滑圆弧滑道BC在B点相切连接,圆弧末端C点切线水平,BC高度和长度忽略不
计。儿童手握滑环,从A沿倾斜向下的绳索AB呼啸而下,直到到达绳索C端,滑环被卡住,儿童松手做
平抛运动(能量不损失),落入地面上长度L6m的沙坑JK。绳索A端离地面高度为11m,绳索全长为
L 10m,忽略儿童的高度,sin37°=0.6,cos37°=0.8,g 10m/s2
0
(1)绳索C端与沙坑J处有一段水平距离,若儿童以速度v2m/s平抛出去刚好落入J处,求该水平距离s;
(2)若儿童从静止加速下滑,在(1)问的安全距离基础上,求能使儿童安全掉入沙坑的绳索动摩擦系数的范
围。
思路分析
第一问的思路:儿童做平抛运动 根据平抛运动规律即可求出水平距离
第二问的思路:
儿童运动到J处的过程中根据动能定 儿童运动到K处的过程中根据动
理可求出摩擦系数的最大值 能定理可求出摩擦系数的最小值
详细解析
【答案】(1)2m
(2)0.350.725
【详解】(1)儿童以速度v2m/s平抛出去刚好落入J处,儿童做平抛运动,则有
1
H L sin gt2,svt
A 0 2
解得
s2m
(2)在(1)问中,根据动能定理有
1
mgL sinmgL cos mv2
0 1 0 2
解得
0.725
1
当儿童落在K时有
1
H L sin gt2,sLvt
A 0 2 1
根据动能定理有
1
mgL sinmgL cos mv2
0 2 0 2 1
解得
0.35
2
综合上述可知
0.350.725
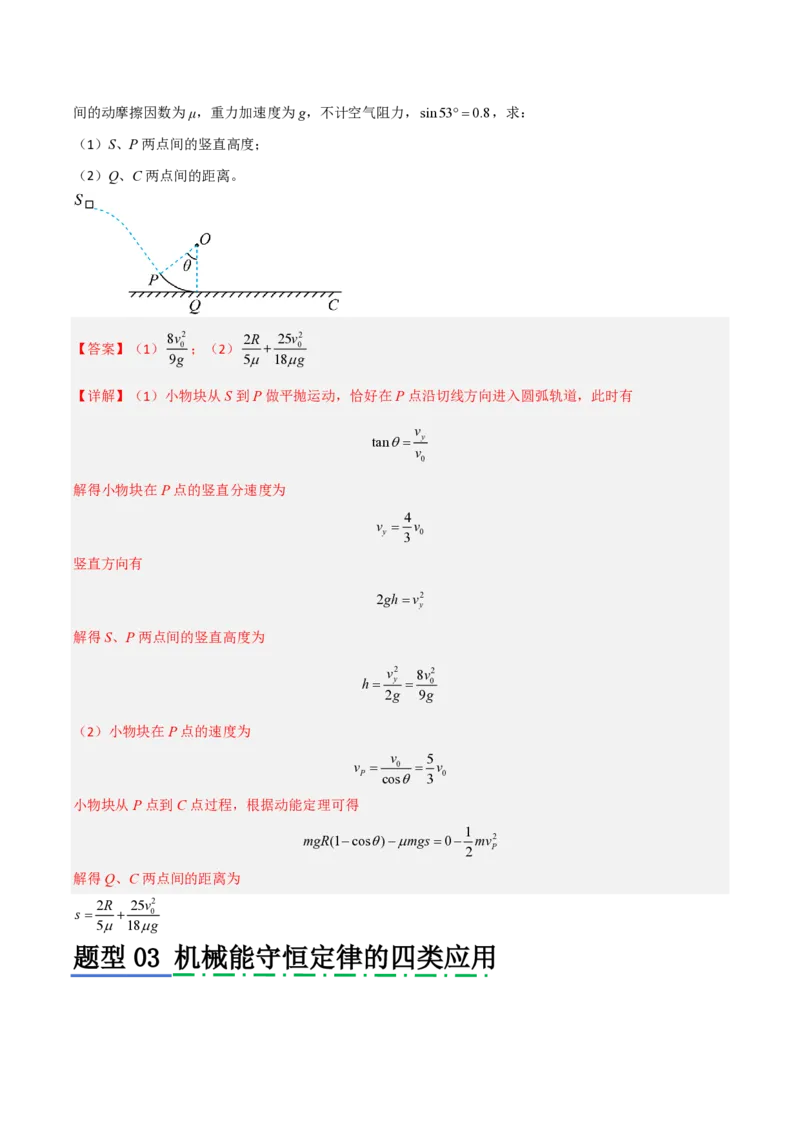
(2024·甘肃平凉·三模)如图所示,固定在竖直面内的光滑圆弧轨道 PQ在Q点与水平面相切,
其圆心为O、半径为R,圆弧对应的圆心角53。一可视为质点的质量为m的小物块从S点以水平初速
度v )抛出,恰好在P点沿切线方向进入圆弧轨道,最后滑上水平面在C点停下来。已知小物块与水平面
0间的动摩擦因数为μ,重力加速度为g,不计空气阻力,sin530.8,求:
(1)S、P两点间的竖直高度;
(2)Q、C两点间的距离。
8v2 2R 25v2
【答案】(1) 0 ;(2) 0
9g 5 18g
【详解】(1)小物块从S到P做平抛运动,恰好在P点沿切线方向进入圆弧轨道,此时有
v
tan y
v
0
解得小物块在P点的竖直分速度为
4
v v
y 3 0
竖直方向有
2ghv2
y
解得S、P两点间的竖直高度为
v2 8v2
h y 0
2g 9g
(2)小物块在P点的速度为
v 5
v 0 v
P cos 3 0
小物块从P点到C点过程,根据动能定理可得
1
mgR(1cos)mgs0 mv2
2 P
解得Q、C两点间的距离为
2R 25v2
s 0
5 18g
题型 03 机械能守恒定律的四类应用这类型的题目是机械能守恒定律的应用,主要包括单物体机械能守恒问题、多物体机械能守恒问题、
含弹簧类机械能守恒问题、用机械能守恒定律解决非质点问题,解题时要正确选用守恒的观点。
一、必备基础知识
1、机械能守恒定律
内容:在只有重力或弹力这类力做功的情况下,物体系统的动能与势能相互转化,但机械能的总量保
持不变。
表达式:E +E =E +E 。应用机械能守恒定律解决问题只需考虑运动的初状态和末状态,不必考
k2 p2 k1 p1
虑两个状态之间过程的细节,即可以简化计算。
守恒条件:受力(物体系统只受重力或弹力作用);做功(物体系统存在其他力作用,但其他力不做
功,只有重力或弹力做功);转化(相互作用的物体组成的系统只有动能和势能的相互转化,无其他形式
能量的转化)。“只有重力或弹力做功”并非“只受重力或弹力作用”,也不是合力的功等于零,更不是
某个物体所受的合力等于零。
只受重力作用,例如不考虑空气阻力的各种抛体运动,物体的机械能守恒;除重力外,物体还受其他
力,但其他力不做功或做功代数和为零;除重力外,只有系统内的弹力做功,并且弹力做的功等于弹性势
能减少量,那么系统的机械能守恒。单独一个物体机械能不守恒,例如与弹簧相连的小球下摆的过程机械
能减少。
机械能守恒定律的三种观点:
观点 表达式 物理意义 注意事项
E +E =E 系统初状态的机械能等于 要选取零势能面,在整个分析过
k1 p1 k2
守恒
+E 末状态的机械能。 程中必须选取同一个零势能面。
p2
系统减少(或增加)的重
不需要选取零势能面,要明确势
转化 ΔE =-ΔE 力势能等于系统增加(或
k p
能的增加量或减少量。
减少)的动能。
若系统由A、B两部分组成, 不需要选取零势能面,A部分机械
当系统的机械能守恒时, 能的增加量等于A部分末状态的
转移 ΔE =ΔE 则A部分机械能的增加量 机械能减去初状态的机械能,而B
A减 B增
等于B部分机械能的减少 部分机械能的减少量等于B部分
量。 初状态的机械能减去末状态的机械能。
2、机械能守恒定律的判断方法
利用定义进行判断 分析动能和势能的和是否发生变化。
利用做功进行判断 系统内只有重力和弹簧弹力做功,其他力均不做功,或有其
他力做功,但其他力做功的代数和为零,则机械能守恒。
利用能量转化进行 若系统内物体间只有动能和重力势能及弹性势能的相互转化,
判断 没有其他形式的能(如没有内能增加)的转化,则系统的机
械能守恒。
3、多物体机械能守恒问题
杆连物体系统;绳连物体系统等。
解题技巧:
首先分析多个物体组成的系统所受的外力是否只有重力或弹力做功,内力是否造成了机械能与其他形
式能的转化,从而判断系统机械能是否守恒。
若系统机械能守恒,则机械能从一个物体转移到另一个物体,ΔE =-ΔE ,一个物体机械能增加,则
1 2
一定有另一个物体机械能减少。
4、含弹簧类机械能守恒问题
问题描述:对两个(或两个以上)物体与弹簧组成的系统在相互作用的过程中,在能量方面,由于弹
簧的形变会具有弹性势能,系统的总动能将发生变化,若系统所受的外力和除弹簧弹力以外的内力不做功,
系统机械能守恒。若还有其他外力和内力做功,这些力做功之和等于系统机械能改变量。做功之和为正,
系统总机械能增加,反之减少。在相互作用过程特征方面,弹簧两端物体把弹簧拉伸至最长(或压缩至最
短)时,两端的物体具有相同的速度,弹性势能最大。如系统每个物体除弹簧弹力外所受合力为零,当弹
簧为自然长度时,系统内弹簧某一端的物体具有最大速度(如绷紧的弹簧由静止释放)。
如果系统内每个物体除弹簧弹力外所受合力为零,当弹簧为自然长度时,系统内弹簧某一端的物体具
有最大速度(如绷紧的弹簧在光滑桌面上由静止释放)。
由于弹簧的形变会具有弹性势能,系统的总动能将发生变化,若系统所受的外力和除弹簧弹力以外的
内力不做功,系统机械能守恒。
弹簧两端物体把弹簧拉伸至最长(或压缩至最短)时,两端的物体具有相同的速度,弹性势能最大。
5、非质点问题
定义:指的是“链条”、“缆绳”、“液柱”等质量不可忽略、柔软的物体或液体。
在应用机械能守恒定律处理实际问题时,经常遇到像“链条”“液柱”类的物体,其在运动过程中将
发生形变,其重心位置相对物体也发生变化,因此这类物体不能再看成质点来处理。
不计摩擦和其他损耗,物体虽然不能看成质点来处理,但因只有重力做功,物体整体机械能守恒。一般情况下,可将物体分段处理,确定质量分布均匀的规则物体各部分的重心位置,根据初、末状态物体重
力势能的变化列式求解。
二、解题模板
1、解题思路
2、注意问题
多物体机械能守恒问题的注意事项:①注意寻找用绳或杆相连接的物体间的速度关系和位移关系;②
列机械能守恒方程时,可选用ΔE =-ΔE 的形式。
k p
含弹簧类机械能守恒问题的注意事项:①对多个物体组成的系统要注意判断物体运动过程中,系统的
机械能是否守恒;②注意寻找用绳或杆或弹簧相连接的物体间的速度关系和位移关系;③列机械能守恒方
程时,一般选用ΔE =-ΔE 或ΔE =-ΔE 的形式。
k p A B
分析非质点系统重力势能变化时的注意事项:①注意等效部分的质量关系:根据物体的相对位置关系
将物体分成若干段,在应用相关规律求解时要注意对应各部分的质量关系;②注意物体的位置变化:解决
涉及重力势能变化的问题时,物体的位置变化要以重心位置变化为准。
3、解题方法
应用类型 解题方法
单个物体 明确研究对象;分析研究对象的受力情况和运动情况,分析清楚
的机械能 各力做功的情况;选取合适的机械能守恒定律的观点列表达式;
守恒问题 对结果进行讨论和说明。
多个物体 分析多个物体组成的系统所受的外力是否只有重力或弹力做功,
的机械能 内力是否造成了机械能与其他形式能的转化,从而判断系统机械
守恒问题 能是否守恒。对多个物体组成的系统,一般用“转化法”和“转
移法”来判断其机械能是否守恒。注意寻找用绳或杆相连接的物
体间的速度关系和位移关系。
含弹簧的 弹簧的形变会具有弹性势能,系统的总动能将发生变化,若系统
机械能守 所受的外力和除弹簧弹力以外的内力不做功,系统机械能守恒。恒问题 弹簧两端物体把弹簧拉伸至最长(或压缩至最短)时,两端的物
体具有相同的速度,弹性势能最大。
非质点的 像“链条”“液柱”类的物体,其在运动过程中将发生形变,其
机械能守 重心位置相对物体也发生变化,因此这类物体不能再看成质点来
恒问题 处理,虽然不能看成质点来处理,但因只有重力做功,物体整体
机械能守恒。一般情况下,可将物体分段处理,确定质量分布均
匀的规则并确定物体各部分的重心位置,然后根据初末状态物体
重力势能的变化列式进行求解。
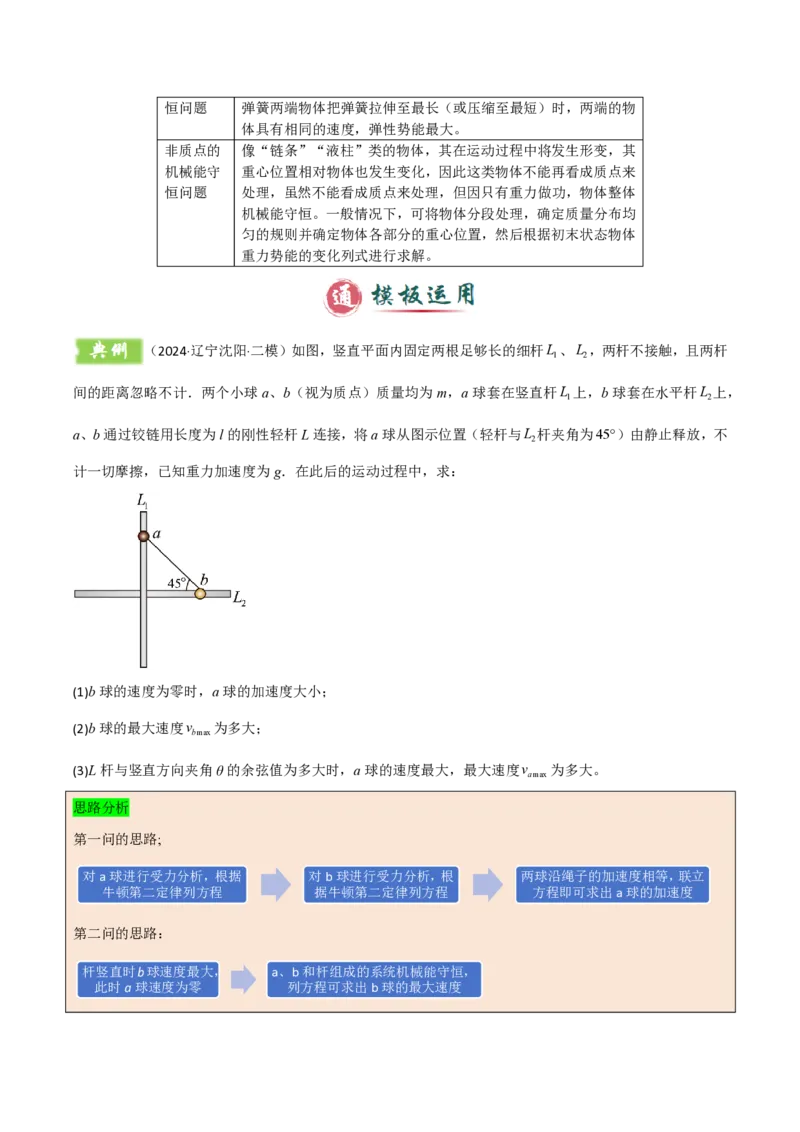
(2024·辽宁沈阳·二模)如图,竖直平面内固定两根足够长的细杆L 、L ,两杆不接触,且两杆
1 2
间的距离忽略不计.两个小球a、b(视为质点)质量均为m,a球套在竖直杆L 上,b球套在水平杆L 上,
1 2
a、b通过铰链用长度为l的刚性轻杆L连接,将a球从图示位置(轻杆与L 杆夹角为45)由静止释放,不
2
计一切摩擦,已知重力加速度为g.在此后的运动过程中,求:
(1)b球的速度为零时,a球的加速度大小;
(2)b球的最大速度v 为多大;
bmax
(3)L杆与竖直方向夹角θ的余弦值为多大时,a球的速度最大,最大速度v 为多大。
amax
思路分析
第一问的思路;
对a球进行受力分析,根据 对b球进行受力分析,根 两球沿绳子的加速度相等,联立
牛顿第二定律列方程 据牛顿第二定律列方程 方程即可求出a球的加速度
第二问的思路:
杆竖直时b球速度最大, a、b和杆组成的系统机械能守恒,
此时a球速度为零 列方程可求出b球的最大速度第三问的思路:
a球速度最大时位于 下方,对a 根据机械能守恒定律和沿杆方向的牛顿第
球和b球列竖直方向的表达式 二定律列方程,联立可解得速度
详细解析
【答案】(1)g
(2) 2 2 gl
14 2 1 17 27 14
(3)cos , gl
6 3 3
【详解】(1)初始位置时,由牛顿第二定律知,a球
mgFsin45ma
1
式中F为L杆沿杆的推力,b球
Fsin45ma
2
沿杆方向两球加速度分量相等,即
a cos45a sin45
1 2
联立解得
g
a a
1 2 2
杆水平时,此时b的速度为0,竖直方向
mg ma
a
解得
a g
a
(2)杆竖直时b球速度最大,此时a球速度为零,a、b球由开始释放到下降到最低点过程,a、b和杆组
成的系统机械能守恒,有:
1
mgl1sin45 mv2
2 bmax
解得
v 2 2 gl
bmax
(3)方法一:a球速度最大时,a球位于L 下方,设此时杆与竖直方向夹角为θ,a、b球由开始释放到杆
2与竖直方向夹角为θ的过程,同理
1 1
mglsin45cos mv2 mv2
2 a 2 b
沿杆方向有
v cosv sin
a b
v 2cos 2 sin2gl
a
令y 2cos 2 sin2,一阶导数为0时,有极值,即
2cos 2 sin2 0
2sin 3cos2 2cos1 0
sin0,0(舍)
14 2
cos (舍)
6
14 2
cos
6
代入可得
1 17 27 14
v gl
a 3 3
方法二:a球速度最大时,a球位于L 下方,设此时杆与竖直方向夹角为θ,a、b球由开始释放到杆与竖直
2
方向夹角为θ的过程,同理
1 1
mgl(sin45cos) mv2 mv2
2 a 2 b
沿杆方向有
v cosv sina球:末态,竖直方向,平衡条件
a b
Tcosmgb球:末态,竖直方向
N mgTcos
b
沿杆方向,牛顿第二定律
v sinv cos2
T mgcosN cosm a b
b l
联立解得14 2
cos (舍)
6
14 2
cos
6
1 17 27 14
v gl
a 3 3
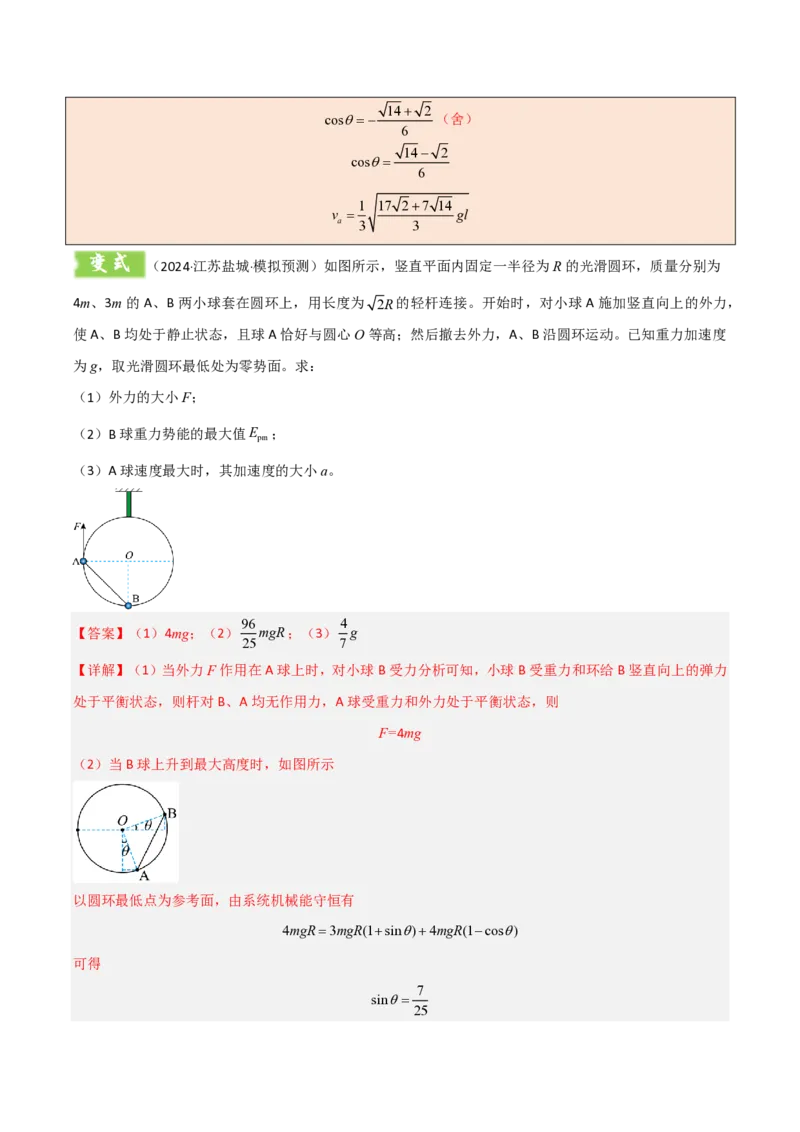
(2024·江苏盐城·模拟预测)如图所示,竖直平面内固定一半径为R的光滑圆环,质量分别为
4m、3m的A、B两小球套在圆环上,用长度为 2R的轻杆连接。开始时,对小球A施加竖直向上的外力,
使A、B均处于静止状态,且球A恰好与圆心O等高;然后撤去外力,A、B沿圆环运动。已知重力加速度
为g,取光滑圆环最低处为零势面。求:
(1)外力的大小F;
(2)B球重力势能的最大值E ;
pm
(3)A球速度最大时,其加速度的大小a。
96 4
【答案】(1)4mg;(2) mgR;(3) g
25 7
【详解】(1)当外力F作用在A球上时,对小球B受力分析可知,小球B受重力和环给B竖直向上的弹力
处于平衡状态,则杆对B、A均无作用力,A球受重力和外力处于平衡状态,则
F=4mg
(2)当B球上升到最大高度时,如图所示
以圆环最低点为参考面,由系统机械能守恒有
4mgR3mgR(1sin)4mgR(1cos)
可得
7
sin
25B球重力势能的最大值
96
E 3mgR(1sin) mgR
pm 25
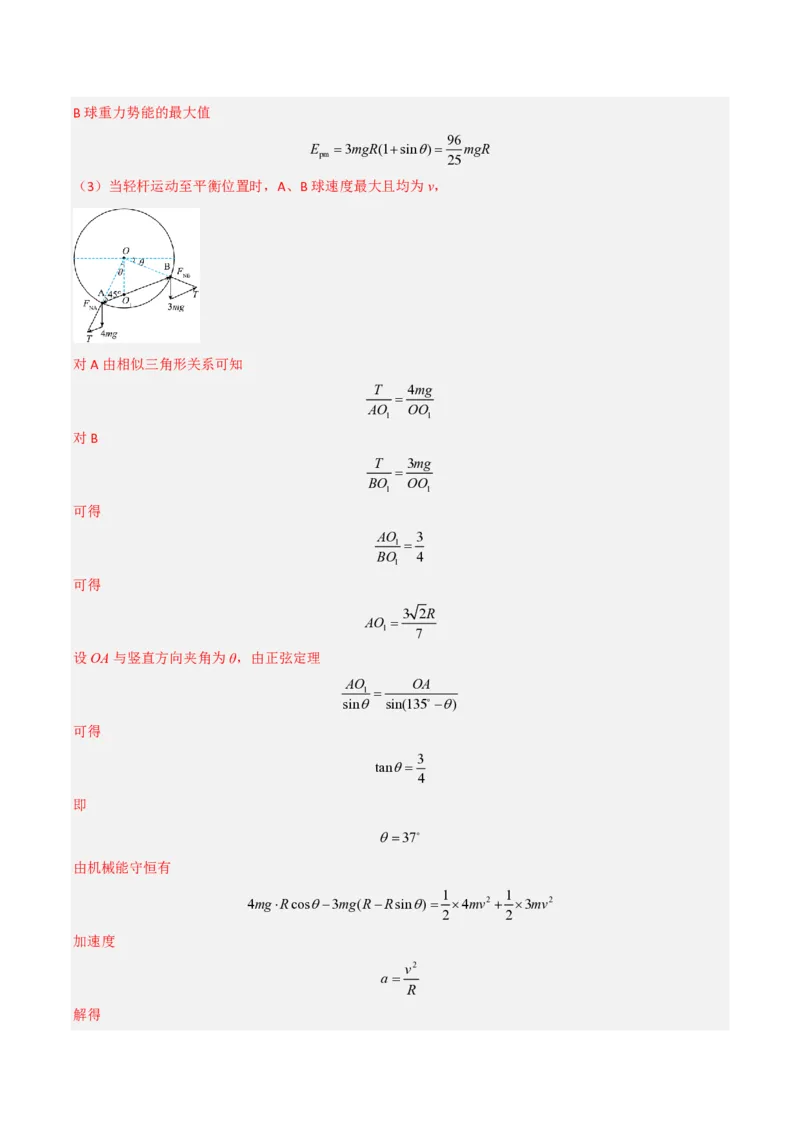
(3)当轻杆运动至平衡位置时,A、B球速度最大且均为v,
对A由相似三角形关系可知
T 4mg
AO OO
1 1
对B
T 3mg
BO OO
1 1
可得
AO 3
1
BO 4
1
可得
3 2R
AO
1 7
设OA与竖直方向夹角为θ,由正弦定理
AO OA
1
sin sin(135)
可得
3
tan
4
即
37
由机械能守恒有
1 1
4mgRcos3mg(RRsin) 4mv2 3mv2
2 2
加速度
v2
a
R
解得4
a g
7
题型 04 机械能守恒定律在曲线运动中的运用
高考常考的类型之一,常于抛体运动、圆周运动等结合在一起,过程较复杂,寻找正确的突破口是解
题的关键,进行正确的受力分析和运动分析题目就会迎刃而解。
一、必备基础知识
1、问题类型
①机械能守恒与平抛运动;②机械能守恒与斜抛运动;③机械能守恒与圆周运动;④机械能守恒与曲
线运动的综合问题。
2、常见守恒类型
单个物体在竖直光滑圆轨道上做圆周运动时,因只有重力做功,机械能守恒。
单个物体做平抛运动、斜抛运动时,因只有重力做功,也常用机械能守恒定律列式求解。
3、机械能守恒定律与动能定理的对比
相同点:①两者研究问题的角度相同,均是从做功和能量转化的角度来研究物体在力的作用下运动状
态的改变;②两者的方程均为标量方程,求解方便,折射它们的优点,同时也只能求出相应的标量,不能
求解矢量的方向和时间,说明其具有局限性;③两者均需要选择适当的初、末状态。
不同点:①研究对象不同,动能定理研究单个物体或可视为单个物体的系统,机械能守恒定律研究相
互作用的物体系统(所讲的单个物体其实是简单说法,地球一般不说出来);②适用条件不同,动能定理
的成立是没有条件限制的,它允许任何力做功,机械能守恒定律是由条件的,就是只有重力和系统内的弹
力做功。能用机械能守恒定律求解的问题也可用动能定理求解,反之则不一定;③着眼点不同,动能定理
着眼于合力的功及初、末状态动能的变化,机械能守恒定律着眼于系统初、末状态机械能的变化。
4、绳子模型和杆模型
模型 绳子模型 杆模型
图例
受力分析F 向下或等于零 F 向下、等于零或向上
弹 弹
v2 v2
力学方程 mg+F =m mg±F =m
弹 弹
R R
小球恰好通过轨道最高点、恰好能做完 由小球恰能运动到最高点得v =0。
临
过最高点 整的圆周运动,隐含着小球运动到最高
的临界条 点时绳或轨道对小球的作用力恰好为
件 𝑣2
零。由mg=m 得v = 𝑔𝑟
𝑟 小
若通过最高点时v> 𝑔𝑟,则绳、轨道 𝑣2
当mg=m 即v= 𝑔𝑟时,F=0此时杆
对球产生一个向下的弹力F,由F+mg 𝑟 N
𝑣2
或管道对小球恰好没有作用力;
=m 可得F随v的增大而增大;
𝑟
当0 𝑔𝑟时,球受到向下的拉力,
𝑣2
由 F+mg=m 可得F随v的增大而增
N 𝑟 N
大;
当v=0时,F=mg,F为支持力,沿半
N N
径背离圆心。
二、解题模板
1、解题思路
2、注意问题
圆周运动中小球的不会脱离轨道包含两中情景:①小球没有通过最高点,但没有脱离圆轨道,这种情
况下小球最高上升到与圆心等高位置处然后原路返回;②小球通过最高点并完成圆周运动,这种情况下最
高点的速度要满足v> gr。
3、解题方法
①明确研究物体,明确是题目中涉及哪些曲线运动模型;
②对物体进行受力分析和运动分析,明确各力的做功情况,判断机械能是否守恒;
③根据机械能守恒定律,选用合适的守恒观点列方程;
④根据题意综合求解;
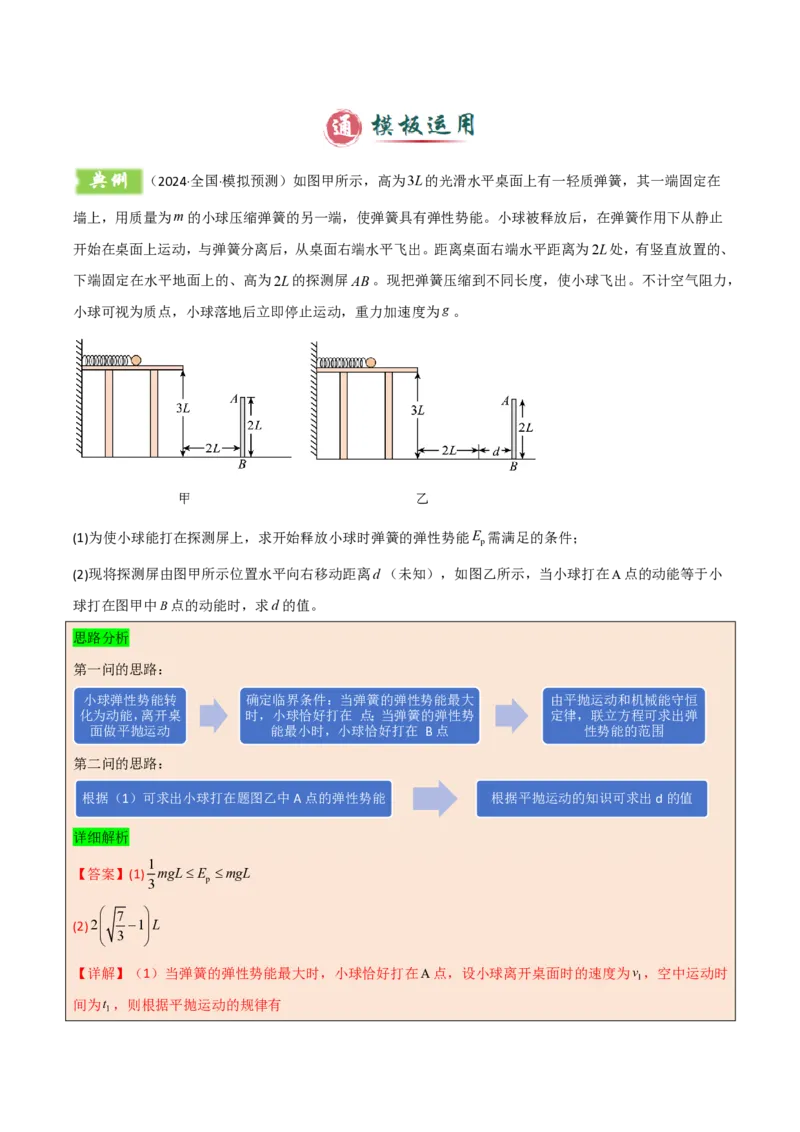
⑤对结果进行分析和讨论。(2024·全国·模拟预测)如图甲所示,高为3L的光滑水平桌面上有一轻质弹簧,其一端固定在
墙上,用质量为m的小球压缩弹簧的另一端,使弹簧具有弹性势能。小球被释放后,在弹簧作用下从静止
开始在桌面上运动,与弹簧分离后,从桌面右端水平飞出。距离桌面右端水平距离为2L处,有竖直放置的、
下端固定在水平地面上的、高为2L的探测屏AB。现把弹簧压缩到不同长度,使小球飞出。不计空气阻力,
小球可视为质点,小球落地后立即停止运动,重力加速度为g。
(1)为使小球能打在探测屏上,求开始释放小球时弹簧的弹性势能E 需满足的条件;
p
(2)现将探测屏由图甲所示位置水平向右移动距离d(未知),如图乙所示,当小球打在A点的动能等于小
球打在图甲中B点的动能时,求d的值。
思路分析
第一问的思路:
小球弹性势能转 确定临界条件:当弹簧的弹性势能最大 由平抛运动和机械能守恒
化为动能,离开桌 时,小球恰好打在 点;当弹簧的弹性势 定律,联立方程可求出弹
面做平抛运动 能最小时,小球恰好打在 B点 性势能的范围
第二问的思路:
根据(1)可求出小球打在题图乙中A点的弹性势能 根据平抛运动的知识可求出d的值
详细解析
1
【答案】(1) mgLE mgL
3 p
7
(2)2 1L
3
【详解】(1)当弹簧的弹性势能最大时,小球恰好打在A点,设小球离开桌面时的速度为v ,空中运动时
1
间为t ,则根据平抛运动的规律有
12Lvt
11
1
L gt2
2 1
联立解得小球离开桌面时的速度
v 2gL
1
由机械能守恒得释放小球时弹簧的弹性势能
1
E mv2 mgL
p1 2 1
当弹簧的弹性势能最小时,小球恰好打在B点,设小球离开桌面时的速度为v ,空中运动时间为t 则根据平
2 2
抛运动的规律有
2Lv t
2 2
1
3L gt2
2 2
联立解得小球离开桌面时的速度
2gL
v
2 3
由机械能守恒得释放小球时弹簧的弹性势能
1 1
E mv2 mgL
p2 2 2 3
则为使小球能打在探测屏上,开始释放小球时弹簧的弹性势能E 需满足
p
1
mgLE mgL
3 p
(2)设小球打在题图甲中B点时的动能为E ,则有
0
E E mg3L
0 p2
由题可知小球打在题图乙中A点时,设弹簧弹性势能为E ,离开桌面是小球速度为v ,有
p3 3
E E mgL
0 p3
又
1
E mv2
p3 2 3
解得
14
v gL
3 3根据平抛运动的规律有
1
L gt2
2 3
vt 2Ld
33
解得
7
d 2 1L
3
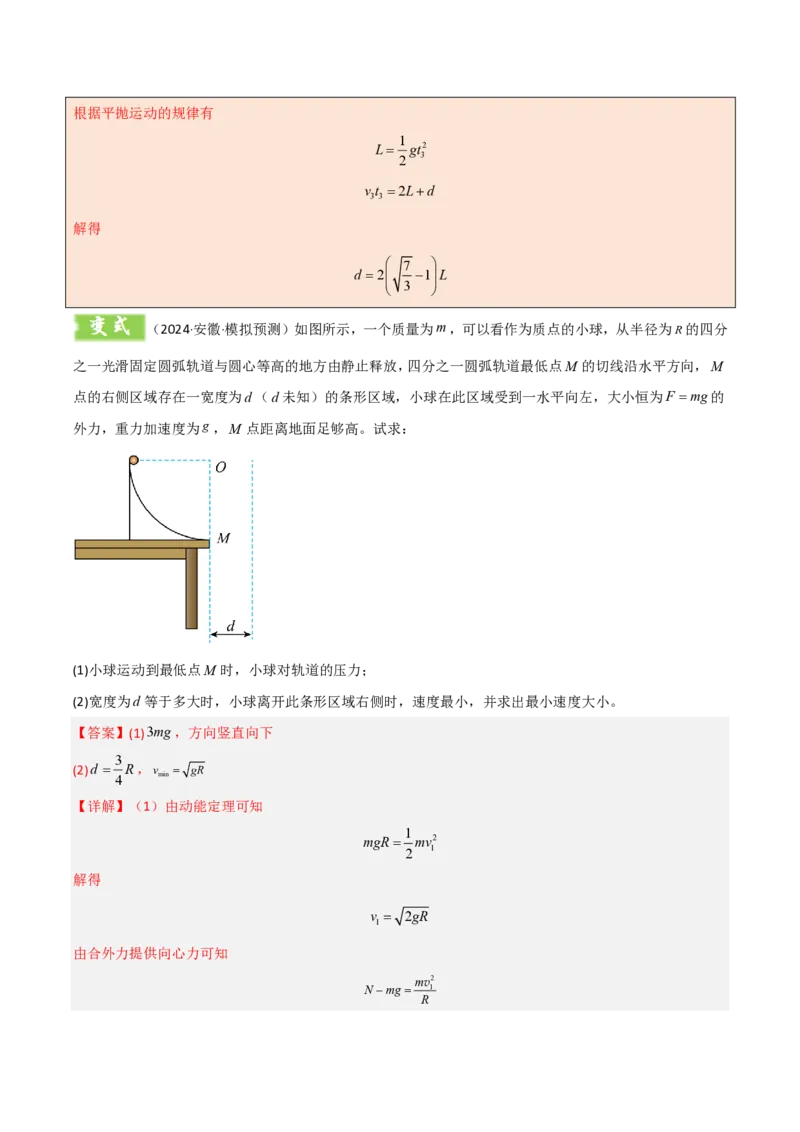
(2024·安徽·模拟预测)如图所示,一个质量为m,可以看作为质点的小球,从半径为R的四分
之一光滑固定圆弧轨道与圆心等高的地方由静止释放,四分之一圆弧轨道最低点M 的切线沿水平方向,M
点的右侧区域存在一宽度为d(d未知)的条形区域,小球在此区域受到一水平向左,大小恒为F mg的
外力,重力加速度为g,M 点距离地面足够高。试求:
(1)小球运动到最低点M 时,小球对轨道的压力;
(2)宽度为d等于多大时,小球离开此条形区域右侧时,速度最小,并求出最小速度大小。
【答案】(1)3mg,方向竖直向下
3
(2)d R,v gR
4 min
【详解】(1)由动能定理可知
1
mgR mv2
2 1
解得
v 2gR
1
由合外力提供向心力可知
mv2
Nmg 1
R代入解得
N 3mg
由牛顿第三定律知,小球对轨道的压力大小3mg,方向竖直向下。
(2)根据题意,在条形区域内小球的运动可以分解到水平向右做加速度为g的匀减速直线运动,竖直方向
做自由落体运动。
v v gt
x 1
v gt
y
小球的合速度
v v2v2
x y
合并以上三式
2
1
v 2gt gR gR
2
R
当t 时,小球离开条形区域的右侧速度最小
2g
v gR
min
小球在水平方向的位移为条形区域的宽度d
1
d vt gt2
1 2
代入数据
3
d R
4
题型 05 功能关系在两种模型的应用
传送带模型和板块模型是高中物理极其重要的两个模型,该类题型考查的方向固定,一是受力分析和
运动分析,一是功能分析。求解时要注意对物体动态分析和终态推断,用运动、力和能量的观点来进行求
解,得到正确的结论。一、必备基础知识
1、功能关系
功是能量转化的量度,即做了多少功就有多少能量发生了转化。做功的过程一定伴随着能量的转化,
而且能量的转化必须通过做功来实现。
2、能量守恒定律
内容:能量既不会凭空产生,也不会凭空消失,它只能从一种形式转化为另一种形式,或者从一个物
体转移到另一个物体,在转化和转移的过程中,能量的总量保持不变。
表达式:①E =E ,初状态各种能量的总和等于末状态各种能量的总和。②ΔE =ΔE ,增加的那些
初 末 增 减
能量的增加量等于减少的那些能量的减少量。
适用范围:能量守恒定律是贯穿物理学的基本规律,是各种自然现象中普遍适应的一条规律。
3、传送带模型
模型条件:①传送带匀速或加速运动;②物体以初速度v 滑上传送带或轻轻放于传送带上,物体与传
0
送带间有摩擦力;③物体与传送带之间有相对滑动。
模型特点:①若物体轻轻放在匀速运动的传送带上,物体一定和传送带之间产生相对滑动,物体一定
受到沿传送带前进方向的摩擦力;②若物体静止在传送带上,与传送带一起由静止开始加速,如果动摩擦
因数较大,则物体随传送带一起加速;如果动摩擦因数较小,则物体将跟不上传送带的运动,相对传送带
向后滑动;③若物体与水平传送带一起匀速运动,则物体与传送带之间没有摩擦力;若传送带是倾斜的,
则物体受到沿传送带向上的静摩擦力作用。
对功W 和Q的理解:①传送带做的功为W =Fx ;②产生的内能Q=F x ,其中x 为相互摩擦
F F 传 f 相对 相对
的物体与传送带间的相对位移。
功能关系分析:W =ΔE +ΔE +Q。
F k p
4、板块模型
模型特点:滑块放置于长木板上,滑块和木板均相对地面或者斜面运动,且滑块和木板在摩擦力的作
用下发生相对滑动。
5、摩擦力做功与能量的关系
静摩擦力做功的特点:①静摩擦力可以做正功,也可以做负功,还可以不做功;②相互作用的一对静
摩擦力做功的代数和总等于零;③静摩擦力做功时,只有机械能的相互转移,不会转化为内能。
滑动摩擦力做功的特点:①滑动摩擦力可以做正功,也可以做负功,还可以不做功;②相互间存在滑动摩
擦力的系统内,一对滑动摩擦力做功将产生两种可能效果(机械能全部转化为内能;有一部分机械能在相
互摩擦的物体间转移,另外一部分转化为内能)。
摩擦生热的计算:Q=F x ,其中x 为相互摩擦的两个物体间的相对位移。
f 相对 相对静摩擦力 动摩擦力
只有能量的转移,而没
能量的转化 既有能量的转移,又有能量的转化
不 有能量的转化
同 一对滑动摩擦力所做功的代数和
一对摩擦 一对静摩擦力所做功
点 不为零,总功W=-F·l ,即摩
f 相对
力的总功 的代数总和等于零
擦时产生的热量
相
同 做功的正、负 两种摩擦力对物体可以做正功、负功,还可以不做功
点
二、解题模板
1、解题思路
2、注意问题
传送带模型:判断摩擦力的有无和方向时,以传送带为参考系;临界状态一般发生在物体速度和传送
带速度相同的时刻;应用运动学公式计算相关物理量时,应以地面为参考系。
板块模型:求解对地位移可优先考虑应用动能定理;求解相对位移可优先考虑应用能量守恒定律;地
面光滑时,求速度可优先考虑应用动量守恒定律。
3、解题方法
传送带模型:
动力学分析:首先要正确分析物体的运动过程,做好受力分析,然后利用运动学公式结合牛顿第二定
律求物体及传送带在相应时间内的位移,找出物体和传送带之间的位移关系。
能量分析:求传送带对物体所做的功、物体和传送带由于相对滑动而产生的热量、因放上物体而使电
动机多消耗的电能等,常依据功能关系或能量守恒定律求解。
板块模型:
动力学分析:分别对滑块和木板进行受力分析,根据牛顿第二定律求出各自的加速度;从放上滑块到
Δv Δv
2 1
二者速度相等,所用时间相等,由t= = ,可求出共同速度v和所用时间t,然后由位移公式可分别求
a a
2 1
出二者的位移。
功和能分析:对滑块和木板分别运用动能定理,或者对系统运用能量守恒定律。如图所示,要注意区分三个位移:①求摩擦力对滑块做功时用滑块对地的位移x ;②求摩擦力对木板做功时用木板对地的位移
滑
x ;③求摩擦生热时用相对位移Δx。
板
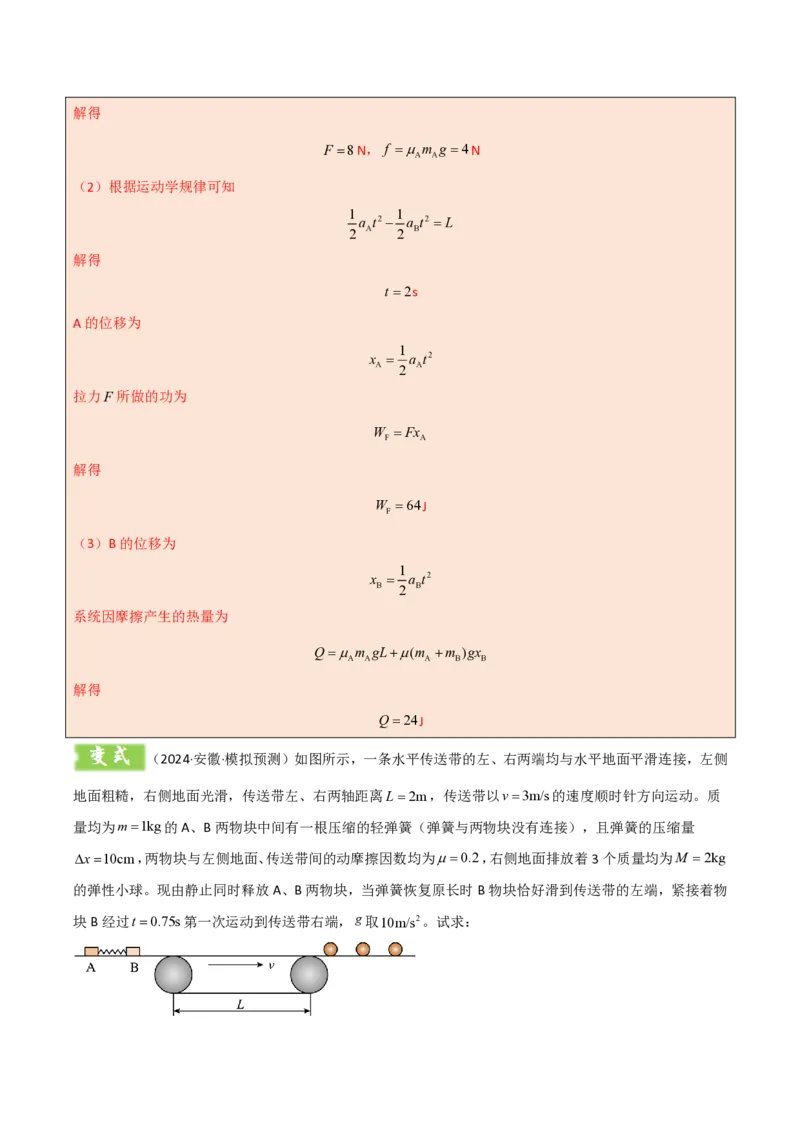
(2024·河北·模拟预测)如图所示,质量为1kg的长木板B放在水平地面上,与地面间的动摩擦
因数为0.1,质量为1kg的小滑块A放在长木板B的最左端。某时刻给小滑块A施加一个水平向右的恒定拉
力F ,A、B向右运动的加速度分别为4m/s2和2m/s2,已知木板B长度为4m,g取10m/s2,求:
(1)水平拉力F 的大小;
(2)A到达B右端的时间以及此过程拉力F 所做的功;
(3)A到达B右端的过程中,系统因摩擦产生的热量。
思路分析
第一问的思路:
对A、B进行受力分析 根据牛顿第二定律列方程,联立可求出拉力
第二问的思路:
A、B运动的位移之差为板的长度,
根据求功的公式可得出拉力做的功
根据运动学的规律可求出A的位移
第三问的思路:
A到达B右端的过程中,摩擦包括 根据功能关系可
两部分,一部分是A、B之间的摩擦, 求出系统因摩擦
一部分是B与地面的摩擦 产生的热量
详细解析
【答案】(1)8N
(2)2s;64J
(3)24J
【详解】(1)两物体加速度不同,则A、B间为滑动摩擦力,对A、B根据牛顿第二定律有
Fm g m a
A A A A
m g(m m )g m a
A A A B B B解得
F 8N, f m g 4N
A A
(2)根据运动学规律可知
1 1
a t2 a t2 L
2 A 2 B
解得
t2s
A的位移为
1
x a t2
A 2 A
拉力F 所做的功为
W Fx
F A
解得
W 64J
F
(3)B的位移为
1
x a t2
B 2 B
系统因摩擦产生的热量为
Qm gL(m m )gx
A A A B B
解得
Q24J
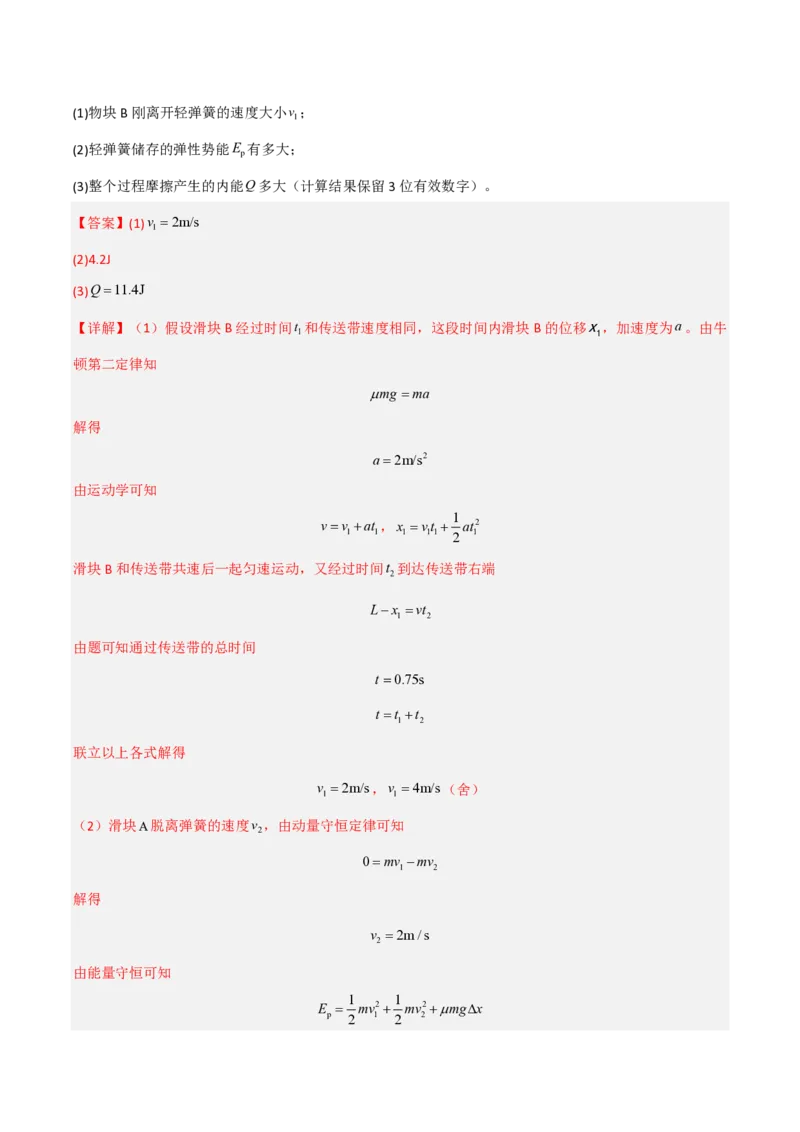
(2024·安徽·模拟预测)如图所示,一条水平传送带的左、右两端均与水平地面平滑连接,左侧
地面粗糙,右侧地面光滑,传送带左、右两轴距离L2m,传送带以v3m/s的速度顺时针方向运动。质
量均为m1kg的A、B两物块中间有一根压缩的轻弹簧(弹簧与两物块没有连接),且弹簧的压缩量
x10cm,两物块与左侧地面、传送带间的动摩擦因数均为0.2,右侧地面排放着3个质量均为M 2kg
的弹性小球。现由静止同时释放A、B两物块,当弹簧恢复原长时B物块恰好滑到传送带的左端,紧接着物
块B经过t 0.75s第一次运动到传送带右端,g取10m/s2。试求:(1)物块B刚离开轻弹簧的速度大小v ;
1
(2)轻弹簧储存的弹性势能E 有多大;
p
(3)整个过程摩擦产生的内能Q多大(计算结果保留3位有效数字)。
【答案】(1)v 2m/s
1
(2)4.2J
(3)Q11.4J
【详解】(1)假设滑块B经过时间t 和传送带速度相同,这段时间内滑块B的位移x,加速度为a。由牛
1 1
顿第二定律知
mg ma
解得
a2m/s2
由运动学可知
1
vv at ,x vt at2
1 1 1 11 2 1
滑块B和传送带共速后一起匀速运动,又经过时间t 到达传送带右端
2
Lx vt
1 2
由题可知通过传送带的总时间
t 0.75s
t t t
1 2
联立以上各式解得
v 2m/s,v 4m/s(舍)
1 1
(2)滑块A脱离弹簧的速度v ,由动量守恒定律可知
2
0mv mv
1 2
解得
v 2m/s
2
由能量守恒可知
1 1
E mv2 mv2mgx
p 2 1 2 2代入数据
E 4.2J
p
(3)滑块B与右侧的小球第一次发生弹性碰撞后,碰后速度分别为v 和u ,由动量守恒可知
B1 1
mvmv Mu
B1 1
由机械能守恒定律可知
1 1 1
mv2 mv2 Mu2
2 2 B1 2 1
联立以上各式
v 1m/s;u 2m/s
B1 1
接下来滑块B返回传送带向左匀减速,经过x 速度减到0,则
3
v2
x B1
3 2g
解得
x 0.25m
3
滑块B从第1次向左通过传送带的右端到第2次通过传送带右端的时间为t
3
v v gt
B1 B1 3
代入数据
t 1s
3
同理可得滑块B从第2次向左通过传送带的右端到第3次通过传送带右端的时间为t
4
1 1
t t s
4 3 3 3
同理可得滑块B从第3次向左通过传送带的右端到第4次通过传送带右端的时间为t
5
1 1
t t s
5 3 4 9
滑块与左侧水平地面产生的内能Q
1
1
Q mgx mv2 2.2J
1 2 2
滑块B第一次从传送带的左端到右端产生的内能Q
2
Q mgvt x 0.5J
2 1 1滑块B从第1次向左通过传送带的右端到第2次通过传送带右端的内能为Q
3
Q mgvt 6J
3 3
滑块B从第2次向左通过传送带的右端到第3次通过传送带右端的内能为Q
4
Q mgvt 2J
4 4
滑块B从第3次向左通过传送带的右端到第4次通过传送带右端的内能为Q
5
2
Q mgvt J
5 5 3
综上整个过程摩擦产生的内能Q
QQ Q Q Q Q 11.4J
1 2 3 4 5
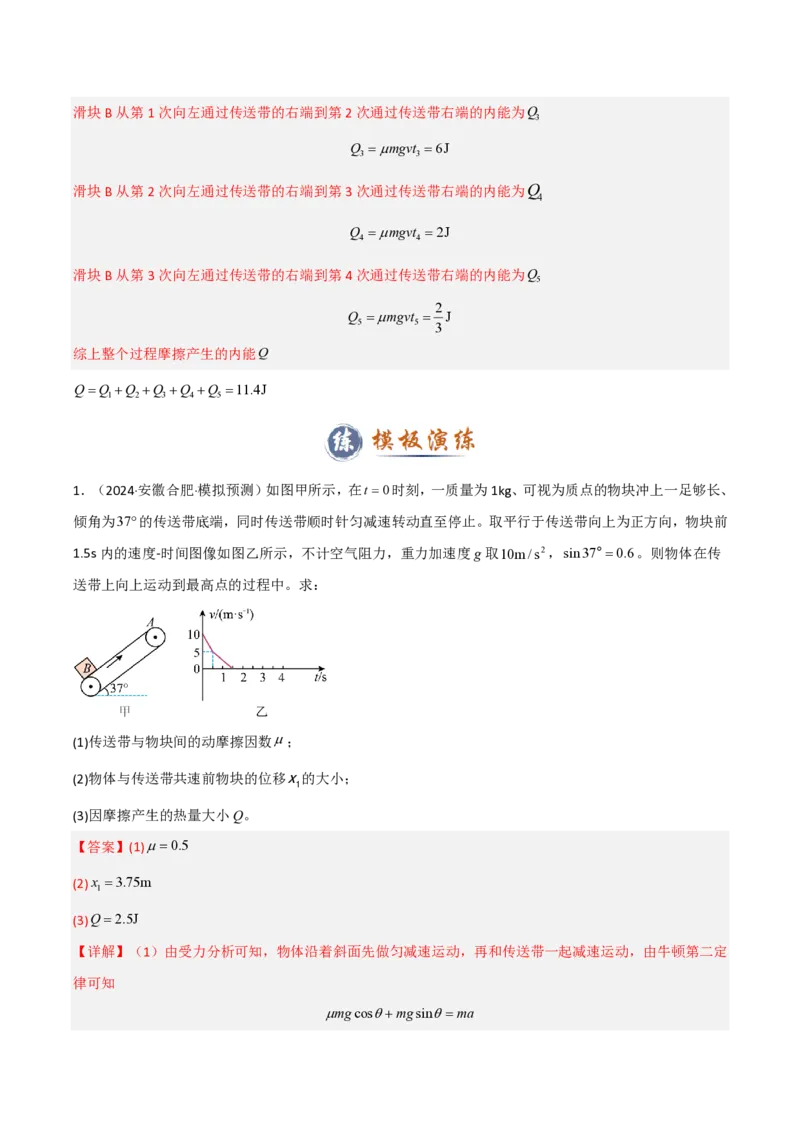
1.(2024·安徽合肥·模拟预测)如图甲所示,在t 0时刻,一质量为1kg、可视为质点的物块冲上一足够长、
倾角为37的传送带底端,同时传送带顺时针匀减速转动直至停止。取平行于传送带向上为正方向,物块前
1.5s内的速度-时间图像如图乙所示,不计空气阻力,重力加速度g取10m/s2,sin37°0.6。则物体在传
送带上向上运动到最高点的过程中。求:
(1)传送带与物块间的动摩擦因数;
(2)物体与传送带共速前物块的位移x的大小;
1
(3)因摩擦产生的热量大小Q。
【答案】(1)0.5
(2)x 3.75m
1
(3)Q2.5J
【详解】(1)由受力分析可知,物体沿着斜面先做匀减速运动,再和传送带一起减速运动,由牛顿第二定
律可知
mgcosmgsinma可知
0.5
(2)设物体与传送带共速前位移为x,由图像乙可知
1
1
x (105)0.5m3.75m
1 2
(3)由图可知,在5m/s共速,此后二者共同减速,则可知减速运动的加速度为
v 05
a m/s2 5m/s2
t 1.50.5
由速度公式vv at可得物体冲上传送带时,传送带的初速度
0
v vat 5m/s50.5m/s7.5m/s
0
则在共速前传送带行驶位移为
v2v2 7.5252
x 0 m3.125m
2 2a 25
则物体与传送带的相对位移
sx x 0.625m
1 2
由摩擦生热的定义式可得
Qmgcoss
代入数据可得
Q2.5J
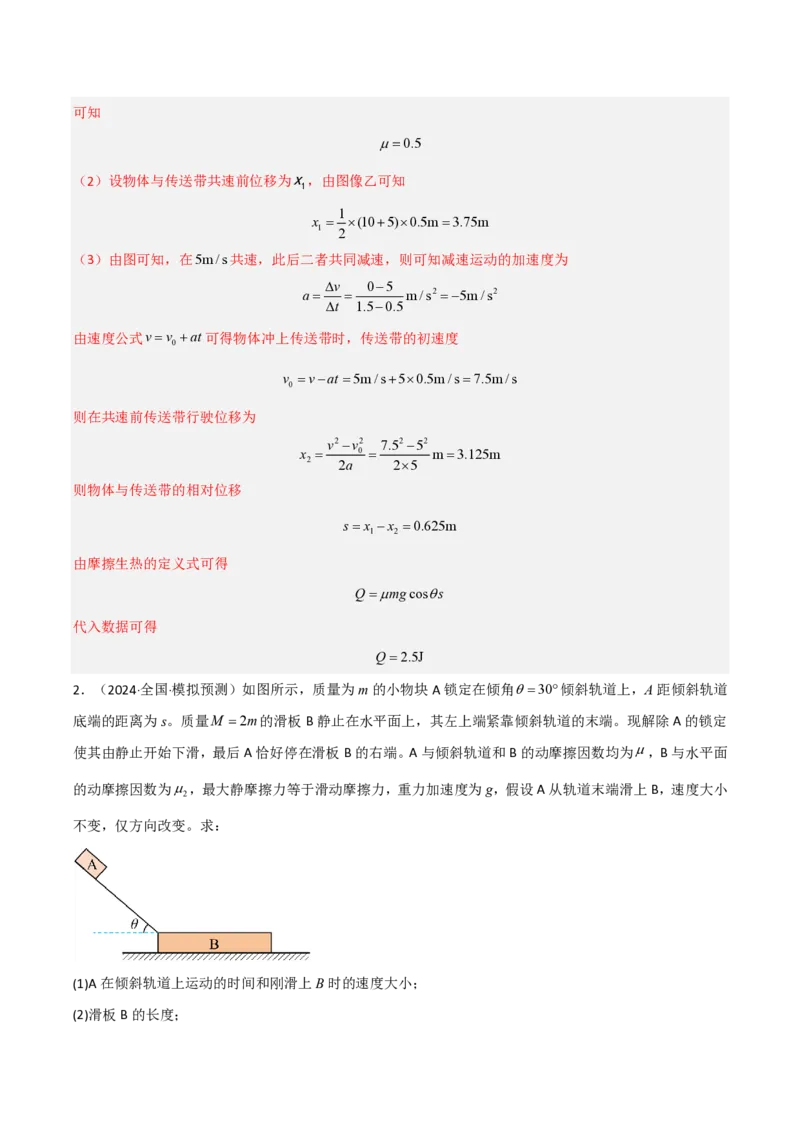
2.(2024·全国·模拟预测)如图所示,质量为m的小物块A锁定在倾角30倾斜轨道上,A距倾斜轨道
底端的距离为s。质量M 2m的滑板B静止在水平面上,其左上端紧靠倾斜轨道的末端。现解除A的锁定
使其由静止开始下滑,最后A恰好停在滑板B的右端。A与倾斜轨道和B的动摩擦因数均为,B与水平面
的动摩擦因数为,最大静摩擦力等于滑动摩擦力,重力加速度为g,假设A从轨道末端滑上B,速度大小
2
不变,仅方向改变。求:
(1)A在倾斜轨道上运动的时间和刚滑上B时的速度大小;
(2)滑板B的长度;(3)最终,整个系统因摩擦产生的热量.
s
t 2
【答案】(1) 1 ,v 1 3 gs
1 3 g 1 1
1
1 3 s 1 3 s
(2)①3,L 1 ,②3,L 1
1 2 1 2 1 2 2 3
1 1 2
1
(3) mgs
2
【详解】(1)(1)A在倾斜轨道下滑,由牛顿第二定律和运动学公式有
mgsin30mgcos30ma
1 1
1
s at2
2 11
v at
1 1
联立解得
s
t 2
1 ,v 1 3 gs
1 3 g 1 1
1
(2)(2)①若mgM mg 3mg,即
1 2 2
3
1 2
滑板始终静止,由动能定理得
1
mgL 0 mv2
1 1 2 1
解得
1 3 s
1
L
1 2
1
②若mg M mg 3mg,即
1 2 2
3
1 2
当A运动到B的右端时二者恰好达到共同速度v。分别对A和B应用牛顿第二定律得
mg ma
1 2
mgM mg Ma
1 2 3
由运动学规律得v a t at
1 2 3
v v v
L 1 t t
2 2 2
联立解得
1 3 s
1
L
2 3
1 2
(3)(3)A和B最终将共同静止在水平面上,由能量守恒定律得
1
Qmgssin mgs
2
1
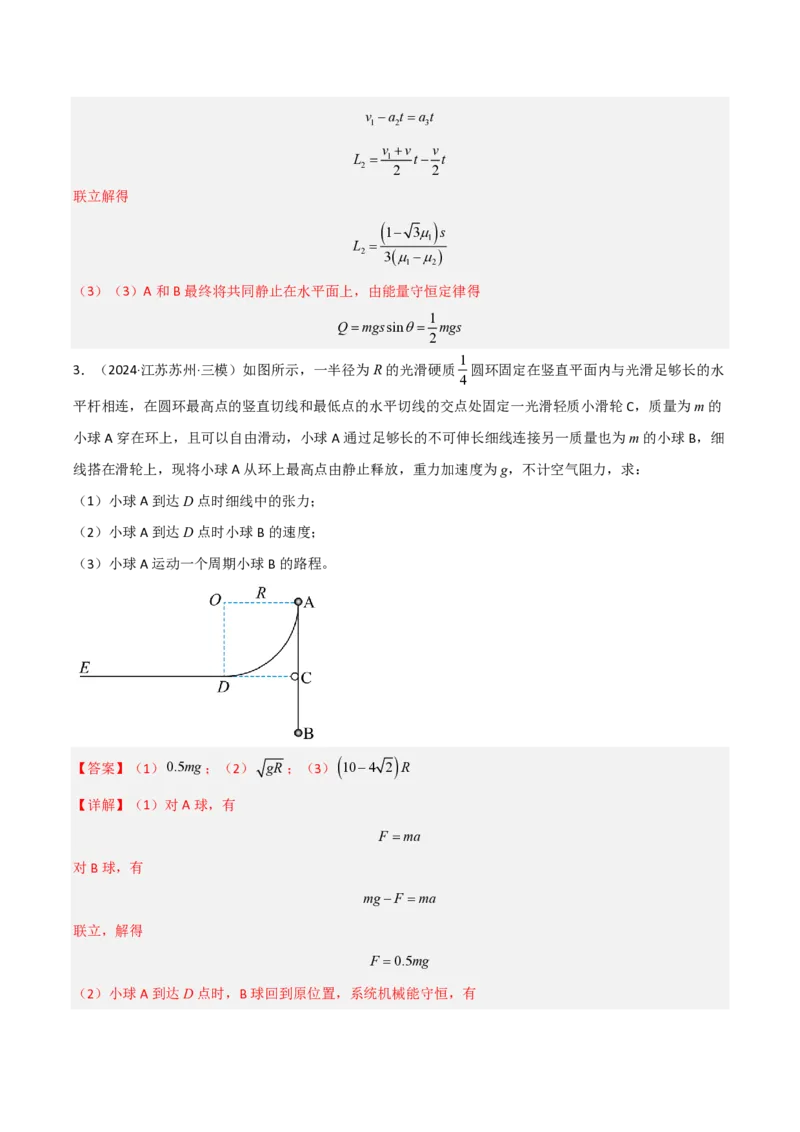
3.(2024·江苏苏州·三模)如图所示,一半径为R的光滑硬质 圆环固定在竖直平面内与光滑足够长的水
4
平杆相连,在圆环最高点的竖直切线和最低点的水平切线的交点处固定一光滑轻质小滑轮C,质量为m的
小球A穿在环上,且可以自由滑动,小球A通过足够长的不可伸长细线连接另一质量也为m的小球B,细
线搭在滑轮上,现将小球A从环上最高点由静止释放,重力加速度为g,不计空气阻力,求:
(1)小球A到达D点时细线中的张力;
(2)小球A到达D点时小球B的速度;
(3)小球A运动一个周期小球B的路程。
【答案】(1)0.5mg;(2) gR;(3) 104 2 R
【详解】(1)对A球,有
F ma
对B球,有
mgF ma
联立,解得
F 0.5mg
(2)小球A到达D点时,B球回到原位置,系统机械能守恒,有1 1
mgR mv2 mv2
2 A 2 B
此时两小球速度大小相等,有
v v
A B
联立,解得
v gR
B
(3)小球A过D点后沿杆向左运动,小球B上升,到两者速度为零。假设小球B上升距离为x,由机械能
守恒可知
mgRmgx
解得
x=R
小球A恰好经过OC与圆环的交点处,此时B下降的高度
h R 2RR 2 2 R
B
由于系统机械能守恒,系统做周期性运动,在小球A再次回到最高点的过程中,小球B的
路程为
s=2(2h +x)
B
解得
s 104 2 R
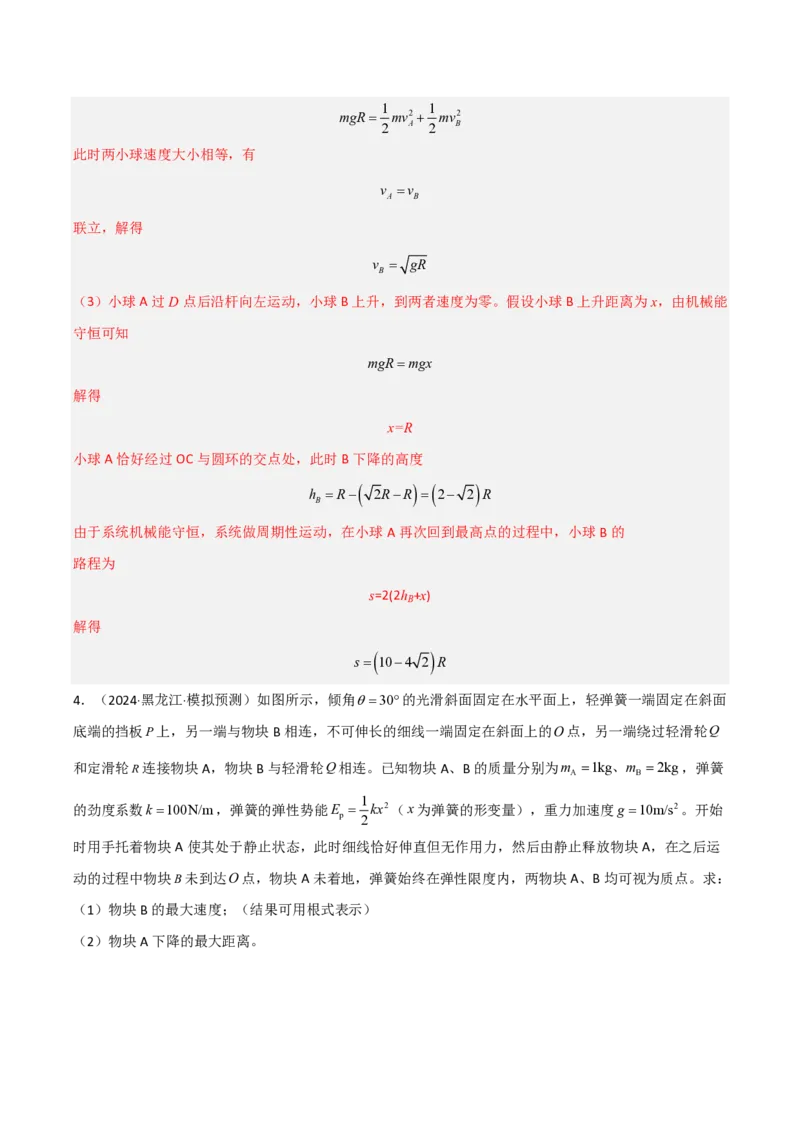
4.(2024·黑龙江·模拟预测)如图所示,倾角30的光滑斜面固定在水平面上,轻弹簧一端固定在斜面
底端的挡板P上,另一端与物块B相连,不可伸长的细线一端固定在斜面上的O点,另一端绕过轻滑轮Q
和定滑轮R连接物块A,物块B与轻滑轮Q相连。已知物块A、B的质量分别为m 1kg、m 2kg,弹簧
A B
1
的劲度系数k 100N/m,弹簧的弹性势能E kx2(x为弹簧的形变量),重力加速度g 10m/s2。开始
p 2
时用手托着物块A使其处于静止状态,此时细线恰好伸直但无作用力,然后由静止释放物块A,在之后运
动的过程中物块B未到达O点,物块A未着地,弹簧始终在弹性限度内,两物块A、B均可视为质点。求:
(1)物块B的最大速度;(结果可用根式表示)
(2)物块A下降的最大距离。6
【答案】(1)v m/s;(2)h0.8m
3
【详解】(1)设物块B处于静止状态时弹簧的压缩量为Δx ,根据平衡条件有
1
kΔx m gsin
1 B
解得
Δx 0.1m
1
当物块B的速度最大时两物块A、B的加速度均为零,设细线上的张力为T,弹簧的伸长量为Δx ,有
2
T m g
A
2T m gsinkΔx
B 2
解得
Δx 0.1m
2
设物块B的最大速度为v,初状态和达到最大速度时弹簧的弹性势能相等,根据能量守恒定律有
1 1
m g2Δx Δx m gΔx Δx sin m (2v)2 m v2
A 1 2 B 1 2 2 A 2 B
解得物块B的最大速度
6
v m/s
3
(2)设物块A下降的最大距离为h,此时两物块A、B的速度均为零,根据机械能守恒定律有
1 h 1 h 2
m gh kΔx2 m g sin k Δx
A 2 1 B 2 2 2 1
解得物块A下降的最大距离
h0.8m
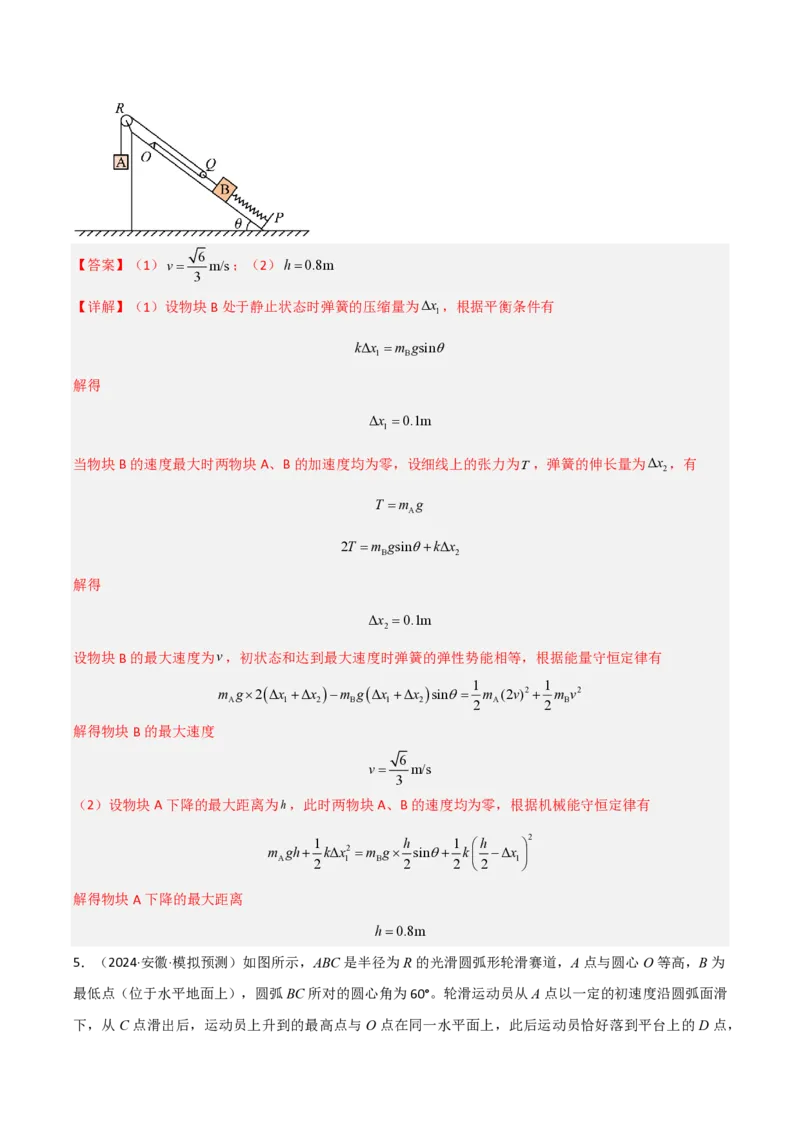
5.(2024·安徽·模拟预测)如图所示,ABC是半径为R的光滑圆弧形轮滑赛道,A点与圆心O等高,B为
最低点(位于水平地面上),圆弧BC所对的圆心角为60°。轮滑运动员从A点以一定的初速度沿圆弧面滑
下,从C点滑出后,运动员上升到的最高点与O点在同一水平面上,此后运动员恰好落到平台上的D点,7
D点距水平地面的高为 R。已知运动员和轮滑鞋的总质量为m,重力加速度大小为g,运动员和轮滑鞋整
8
体视为质点,不计空气阻力。求:
(1)运动员从C点滑出时的速度大小;
(2)运动员和轮滑鞋一起在B点对轨道的压力;
(3)平台D点离圆弧轨道C点的水平距离。
2
【答案】(1) 3gR
3
10
(2) mg,方向竖直向下
3
3
(3) R
2
【详解】(1)设运动员从C点滑出的速度大小为v ,运动员从C点滑出后,竖直上升的高度
C
hRcos60
竖直方向分运动
(v sin60)2 2gh
C
解得
2
v 3gR
C 3
(2)设运动员到B点时速度大小为vB,从B到C,根据机械能守恒
1 1
mg(RRcos60) mv2 mv2
2 C 2 B
在B点,根据牛顿第二定律有
v2
Fmg m B
R
解得
10
F mg
3
根据牛顿第三定律,运动员和轮滑鞋一起在B点对轨道的压力大小
10
F'F mg
3方向竖直向下
(3)运动员从C点滑出后,上升的过程有
v sin60gt
C 1
设下降的时间为t ,则
2
1 1
R gt2
8 2 2
则D点与C点的水平距离
3
sv cos60(t t ) R
C 1 2 2
6.(2024·陕西西安·一模)北京时间2024年7月31日,在巴黎奥运会自由式小轮车女子公园赛决赛中,
中国选手邓雅文夺得金牌。这也是中国运动员第一次参加奥运会自由式小轮车项目。其部分场地可以简化
为如图所示的模型,平台A左右弧面对称,右侧为半径r3m的部分圆弧面,圆心角满足sin0.8,平
1
台B为 的圆弧面,半径R3.2m,邓雅文以一定的初速度v 从平台的左下端冲向平台A,从M点腾空后
4 0
沿切线从N点进入赛道,再经过一段水平骑行从Q点进入平台B,恰好到达平台B的上端边缘,平台A上
端MN间的距离为2.4m,邓雅文和独轮车总质量为75kg,运动过程中可视为质点,整个过程邓雅文只在PQ
段进行了骑行做功,不计一切阻力,重力加速度取g 10m/s2,求:
(1)邓雅文和独轮车到达Q点时赛道给独轮车的支持力大小;
(2)邓雅文和独轮车在MN段腾空最高处的速度;
(3)邓雅文在PQ段骑行过程中所做的功。
【答案】(1)2250N
(2)3m/s
(3)562.5J
【详解】(1)由于运动员恰好到达平台B的上端边缘,根据机械能守恒
1
mgR mv2
2 Q
根据牛顿第二定律
v2
F mg m Q
N R联立解得支持力大小
F 2250N
N
(2)运动员从M点做斜抛运动,设初速度为v,则
vtcos2.4
2vsingt
解得
v5m/s
因此在最高点的速度
v vcos3m/s
水平
(3)从M到Q的过程中,根据动能定理
1 1
mgr(1cos)W mv2 mv2
2 Q 2
解得
W 562.5J
7.(2024·广东·模拟预测)如图所示,AB和AC是半径分别为r1.8m和R3.6m的两条光滑半圆弧轨道
的直径,两轨道相切于A点,半圆弧轨道AC竖直放置在水平桌面上,与桌面的接触点为C,C点到桌面右
端D的距离L8m,桌面距水平地面的高度H 1m。在距离桌面D点水平距离d 4m的地方有一木箱,木
箱的左边界为E、右边界F ,木箱长2m,高0.2m,木箱厚度不计。B点左侧水平位置有一弹射装置,质量
m1.0kg的小球以一定的初速度向右弹出,小球恰好能通过最高点A并沿圆弧轨道运动,已知小球与桌面
CD间的动摩擦因数0.5,取重力加速度大小g 10m/s2,不计空气阻力。
(1)求小球经过C点时对轨道的压力F ;
C
(2)试判断小球能否进入木箱;
(3)若小球能进入木箱,求弹射装置对小球弹射的最大速度v 。
B
【答案】(1)F 60N,方向竖直向下
C
(2)小球恰好从左侧E处掉入木箱(3)v 233m/s
B
【详解】(1)小球恰好能通过最高点A,设小球在A点的速度大小为v ,根据重力提供向心力
A
v2
mg m A
R
在C点的速度大小为v 小球在C点受到的支持力为F ,从A到C过程,根据动能定理
C N
1 1
mg2R mv2 mv2
2 C 2 A
在C点根据牛顿第二定律
v2
F mg m C
N R
根据牛顿第三定律
F F
C N
解得
F 60N
C
方向竖直向下。
(2)小球从C点运动到D点的过程中只有摩擦力做功,由动能定理得
1 1
mgL mv 2 mv 2
2 D 2 C
假设小球能进入木箱,则下落高度
h(10.2)m0.8m
设小球从D点到进入木箱的时间为t,根据
1
h gt2
2
这段时间内小球的水平位移大小
xv t
D
解得
x4m
所以小球恰好从左侧E处掉入木箱。
(3)当从D点飞出的小球恰好落到F 端的上侧时,弹射出的小球速度最大,此时小球竖直下落的高度
h0.8m,水平位移大小x6m,设小球到达D点的速度大小为v ,根据
D1
h gt2,xv t
2 D
小球由B点运动到D点根据动能定理得
1 1
mgRmgL mv2 mv 2
2 D 2 B
解得
v 233m/s
B
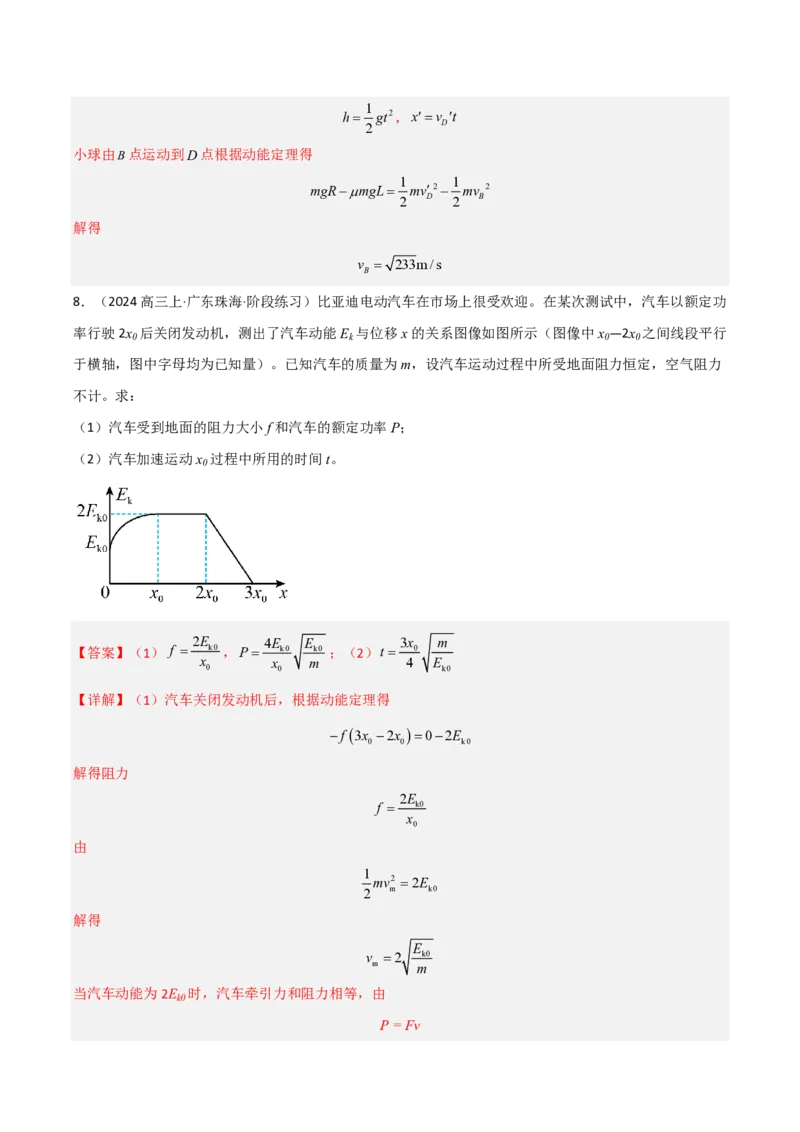
8.(2024高三上·广东珠海·阶段练习)比亚迪电动汽车在市场上很受欢迎。在某次测试中,汽车以额定功
率行驶2x 后关闭发动机,测出了汽车动能E 与位移x的关系图像如图所示(图像中x —2x 之间线段平行
0 k 0 0
于横轴,图中字母均为已知量)。已知汽车的质量为m,设汽车运动过程中所受地面阻力恒定,空气阻力
不计。求:
(1)汽车受到地面的阻力大小f和汽车的额定功率P;
(2)汽车加速运动x 过程中所用的时间t。
0
2E 4E E 3x m
【答案】(1) f k0 ,P k0 k0 ;(2)t 0
x x m 4 E
0 0 k0
【详解】(1)汽车关闭发动机后,根据动能定理得
f 3x 2x 02E
0 0 k0
解得阻力
2E
f k0
x
0
由
1
mv2 2E
2 m k0
解得
E
v 2 k0
m m
当汽车动能为2E 时,汽车牵引力和阻力相等,由
k0
P = Fv解得
4E E
P fv k0 k0
m x m
0
(2)根据动能定理
Pt fx 2E E
0 k0 k0
解得
2E E fx E 2E 3x m
t k0 k0 0 k0 k0 0
P 4E E 4 E
k0 k0 k0
x m
0
9.(2024·山东济南·模拟预测)如图所示,借助电动机和斜面将质量为20kg的货物用最短的时间从斜面底
端拉到斜面顶端。货物依次经历匀加速、变加速、匀速、匀减速四个阶段,到达顶端时速度刚好为零。已
知电动机的额定功率为1200W、绳子的最大拉力为300N,绳子与斜面平行,斜面长度为34.2m,倾角
3
θ=30°,货物与斜面的摩擦因数为 ,减速阶段加速度大小不超过5m/s2,g取10m/s2。求:
3
(1)减速阶段电动机的牵引力T;
(2)货物运动总时间t。
【答案】(1)100N;(2)7s
【详解】(1)减速阶段,根据牛顿第二定律有
mgcosmgsinT ma
2
解得
T 100N
(2)货物在第一阶段做匀加速上升过程,根据牛顿第二定律可得
F mgsinmgcosma
1 1
解得
a 5m/s2
1当功率达到额定功率时,设货物的速度为v ,则有
1
P
v 4m/s
1 F
1
此过程所用时间和上滑的距离分别为
v 4
t 1 s0.8s
1 a 5
1
v2
x 1 1.6m
1 2a
1
货物以最大速度匀速时,有
P
v 6m/s
m mgsinmgcos
货物最后以最大加速度做匀减速运动的时间和上滑的距离分别为
v 6
t m s1.2s
3 a 5
m
v2
x m 3.6m
3 2a
m
因此,从电动机达到额定功率到货物即将减速,上滑的距离为
x 34.23.61.6m29m
2
设重物从结束匀加速运动到开始做匀减速运动所用时间为t ,该过程根据动能定理可得
2
1 1
Pt mgsinx mgcosx mv2 mv2
2 2 2 2 m 2 1
解得
t 5s
2
所以总时间为
t t t t 7s
1 2 3
