文档内容
第九章 平面直角坐标系
9.1 用坐标描述平面内点的位置
9.1.1 平面直角坐标系的概念
教学目标
课题 9.1.1 平面直角坐标系的概念 授课人
1.认识平面直角坐标系、原点、横轴、纵轴和象限.
素养目标 2.能正确画出平面直角坐标系,经历由点写出坐标、由坐标描点,体会数形
结合思想.
教学重点 正确认识平面直角坐标系,会准确地由点写出坐标、由坐标描点.
教学难点 平面内点的坐标的有序性.
教学活动
教学步骤 师生活动
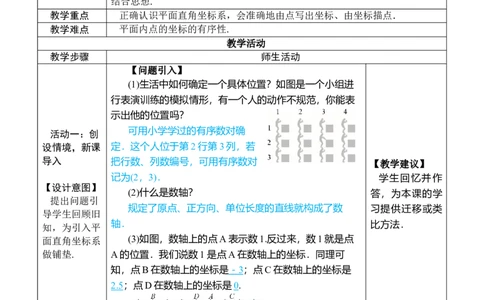
【问题引入】
(1)生活中如何确定一个具体位置?如图是一个小组进
行表演训练的模拟情形,有一个人的动作不规范,你能表
示出他的位置吗?
活动一:创 可用小学学过的有序数对确
设情境,新课 定.这个人位于第2行第3列,若
导入 把行数、列数编号,可用有序数对 【教学建议】
记为(2,3). 学生回忆并作
【设计意图】
(2)什么是数轴? 答,为本课的学
提出问题引
规定了原点、正方向、单位长度的直线就构成了数 习提供迁移或类
导学生回顾旧
知,为引入平 轴. 比方法.
面直角坐标系 (3)如图,数轴上的点A表示数1.反过来,数1就是点
做铺垫. A的位置.我们说数1是点A在数轴上的坐标.同理可
知,点B在数轴上的坐标是 - 3 ;点C在数轴上的坐标是
2.5;点D在数轴上的坐标是0.
(4)数轴上的点与实数之间存在着一一对应的关系.
活动二:
探究点1 平面直角坐标系 【教学建议】
交流合作,探
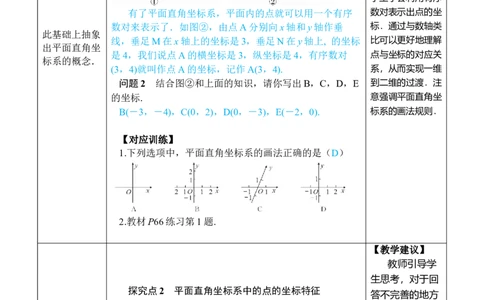
问题1 (教材P64思考)类似于上面利用数轴确定直线 教师引导学生
究新知
上点的位置,能不能找到一种办法来确定平面内的点的位 自主思考,可以进
置呢(请以图①中的点A为例说明)? 行讨论交流,教师
【设计意图】
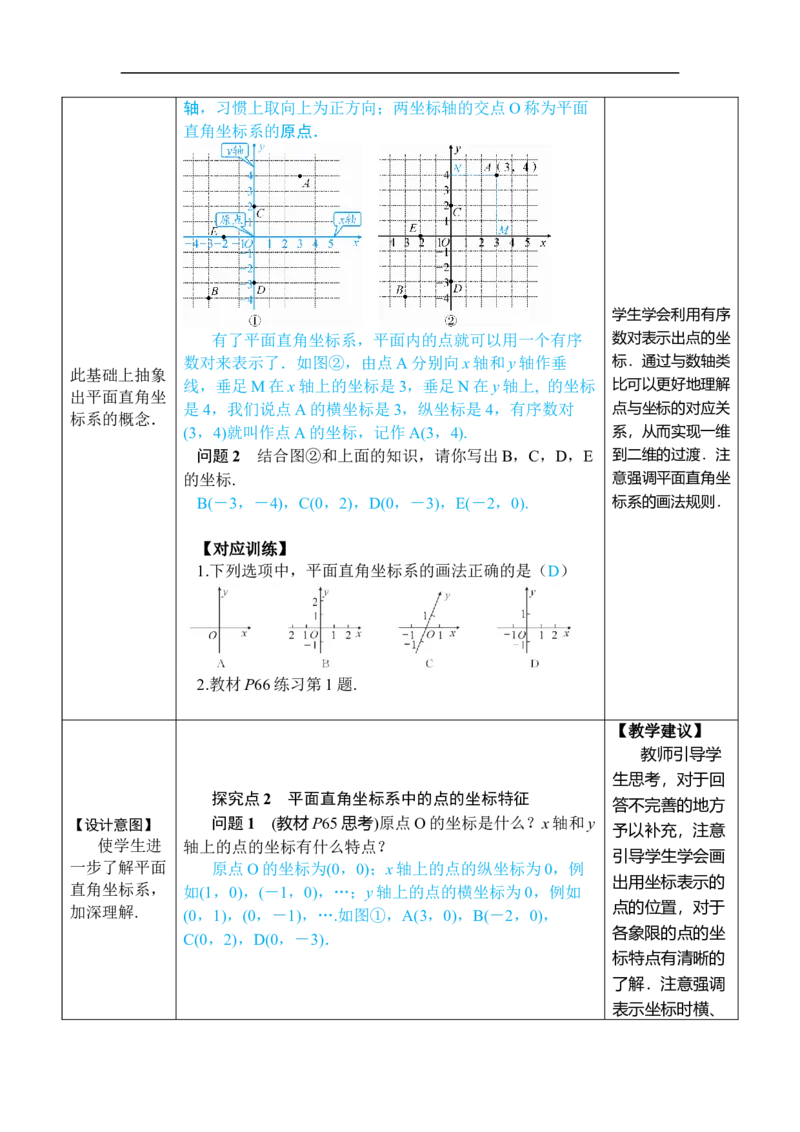
如图①,我们可以在平面内画两条互相垂直、原点重 最后进行总结并引
通过与数
合的数轴,组成平面直角坐标系.水平的数轴称为x轴或 入平面直角坐标系
轴类比的实例
进行引入,在 横轴,习惯上取向右为正方向;竖直的数轴称为y轴或纵 的概念.注意引导轴,习惯上取向上为正方向;两坐标轴的交点O称为平面
直角坐标系的原点.
学生学会利用有序
有了平面直角坐标系,平面内的点就可以用一个有序 数对表示出点的坐
数对来表示了.如图②,由点A分别向x轴和y轴作垂 标.通过与数轴类
此基础上抽象
线,垂足M在x轴上的坐标是3,垂足N在y轴上, 的坐标 比可以更好地理解
出平面直角坐
是4,我们说点A的横坐标是3,纵坐标是4,有序数对 点与坐标的对应关
标系的概念.
(3,4)就叫作点A的坐标,记作A(3,4). 系,从而实现一维
问题2 结合图②和上面的知识,请你写出B,C,D,E 到二维的过渡.注
的坐标. 意强调平面直角坐
B(-3,-4),C(0,2),D(0,-3),E(-2,0). 标系的画法规则.
【对应训练】
1.下列选项中,平面直角坐标系的画法正确的是(D)
2.教材P66练习第1题.
【教学建议】
教师引导学
生思考,对于回
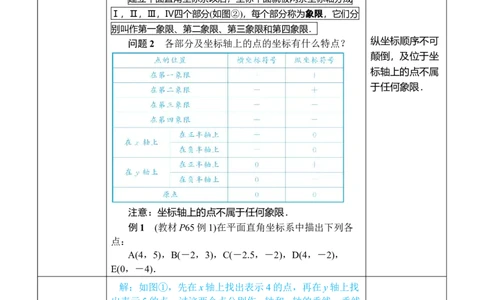
探究点2 平面直角坐标系中的点的坐标特征
答不完善的地方
【设计意图】 问题1 (教材P65思考)原点O的坐标是什么?x轴和y
予以补充,注意
使学生进 轴上的点的坐标有什么特点?
引导学生学会画
一步了解平面 原点O的坐标为(0,0);x轴上的点的纵坐标为0,例
出用坐标表示的
直角坐标系, 如(1,0),(-1,0),…;y轴上的点的横坐标为0,例如
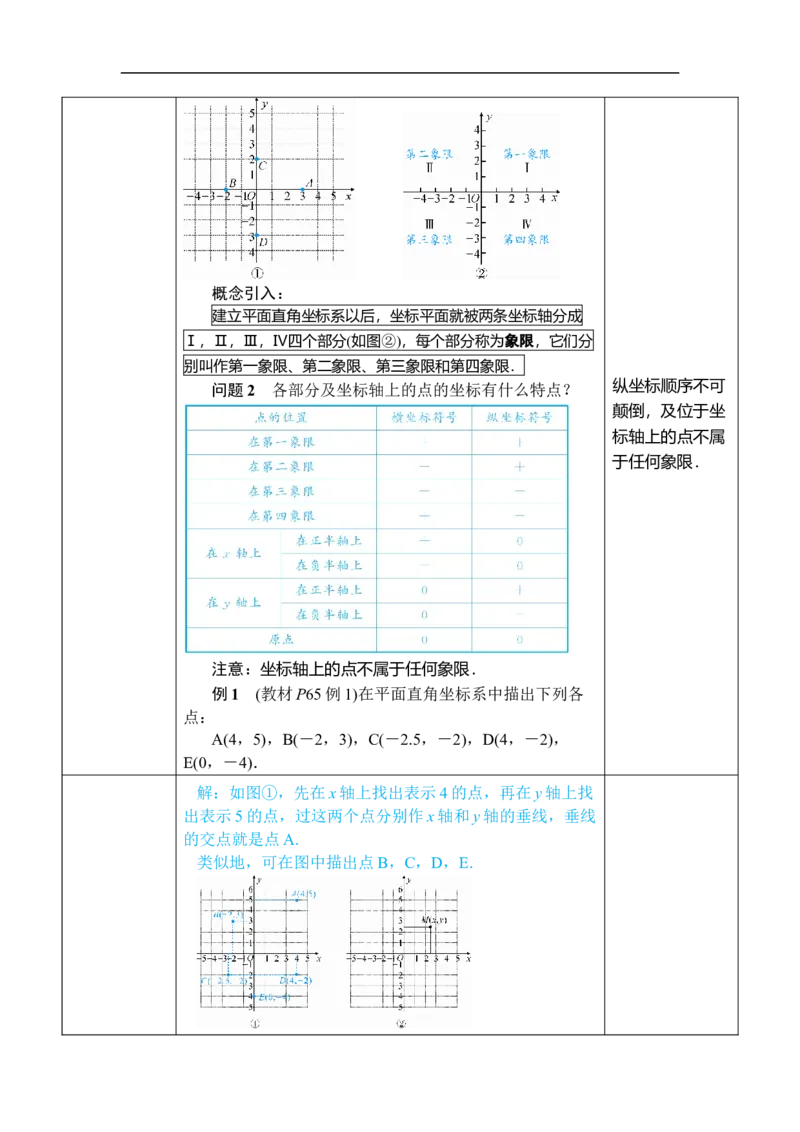
加深理解. (0,1),(0,-1),….如图①,A(3,0),B(-2,0), 点的位置,对于
各象限的点的坐
C(0,2),D(0,-3).
标特点有清晰的
了解.注意强调
表示坐标时横、概念引入:
建立平面直角坐标系以后,坐标平面就被两条坐标轴分成
Ⅰ,Ⅱ,Ⅲ,Ⅳ四个部分(如图②),每个部分称为象限,它们分
别叫作第一象限、第二象限、第三象限和第四象限.
问题2 各部分及坐标轴上的点的坐标有什么特点? 纵坐标顺序不可
颠倒,及位于坐
标轴上的点不属
于任何象限.
注意:坐标轴上的点不属于任何象限.
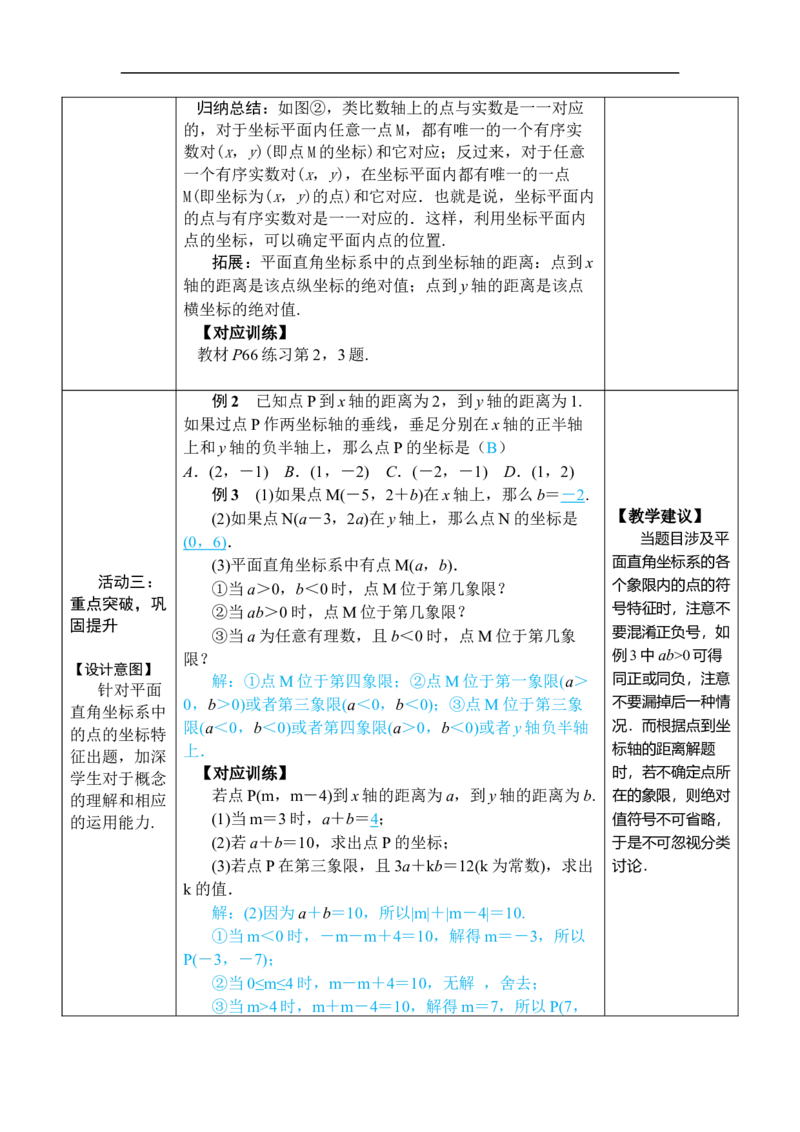
例1 (教材P65例1)在平面直角坐标系中描出下列各
点:
A(4,5),B(-2,3),C(-2.5,-2),D(4,-2),
E(0,-4).
解:如图①,先在x轴上找出表示4的点,再在y轴上找
出表示5的点,过这两个点分别作x轴和y轴的垂线,垂线
的交点就是点A.
类似地,可在图中描出点B,C,D,E.归纳总结:如图②,类比数轴上的点与实数是一一对应
的,对于坐标平面内任意一点M,都有唯一的一个有序实
数对(x,y)(即点M的坐标)和它对应;反过来,对于任意
一个有序实数对(x,y),在坐标平面内都有唯一的一点
M(即坐标为(x,y)的点)和它对应.也就是说,坐标平面内
的点与有序实数对是一一对应的.这样,利用坐标平面内
点的坐标,可以确定平面内点的位置.
拓展:平面直角坐标系中的点到坐标轴的距离:点到x
轴的距离是该点纵坐标的绝对值;点到y轴的距离是该点
横坐标的绝对值.
【对应训练】
教材P66练习第2,3题.
例2 已知点P到x轴的距离为2,到y轴的距离为1.
如果过点P作两坐标轴的垂线,垂足分别在x轴的正半轴
上和y轴的负半轴上,那么点P的坐标是(B)
A.(2,-1) B.(1,-2) C.(-2,-1) D.(1,2)
例3 (1)如果点M(-5,2+b)在x轴上,那么b= - 2.
(2)如果点N(a-3,2a)在y轴上,那么点N的坐标是 【教学建议】
(0 , 6) . 当题目涉及平
(3)平面直角坐标系中有点M(a,b). 面直角坐标系的各
活动三:
①当a>0,b<0时,点M位于第几象限? 个象限内的点的符
重点突破,巩
②当ab>0时,点M位于第几象限? 号特征时,注意不
固提升
③当a为任意有理数,且b<0时,点M位于第几象 要混淆正负号,如
限? 例3中ab>0可得
【设计意图】
解:①点M位于第四象限;②点M位于第一象限(a> 同正或同负,注意
针对平面
0,b>0)或者第三象限(a<0,b<0);③点M位于第三象 不要漏掉后一种情
直角坐标系中
限(a<0,b<0)或者第四象限(a>0,b<0)或者y轴负半轴 况.而根据点到坐
的点的坐标特
上. 标轴的距离解题
征出题,加深
【对应训练】 时,若不确定点所
学生对于概念
的理解和相应 若点P(m,m-4)到x轴的距离为a,到y轴的距离为b. 在的象限,则绝对
的运用能力. (1)当m=3时,a+b=4; 值符号不可省略,
(2)若a+b=10,求出点P的坐标; 于是不可忽视分类
(3)若点P在第三象限,且3a+kb=12(k为常数),求出 讨论.
k的值.
解:(2)因为a+b=10,所以|m|+|m-4|=10.
①当m<0时,-m-m+4=10,解得m=-3,所以
P(-3,-7);
②当0≤m≤4时,m-m+4=10,无解 ,舍去;
③当m>4时,m+m-4=10,解得m=7,所以P(7,3).
综上所述,点P的坐标为(-3,-7)或(7,3).
(3)因为点P在第三象限,所以m<0,m-4<0,
所以a=|m-4|=4-m,b=|m|=-m.
因为3a+kb=12,所以3(4-m)-km=12,所以-3m-
km=0,所以k=-3.
【随堂训练】见《创优作业》“随堂小练”册子(或“随堂作业”册子)相应
课时随堂训练.
【课堂总结】师生一起回顾本节课所学主要内容,并请学生回答以下问题:
1.什么是平面直角坐标系?平面直角坐标系中的点具有哪些坐标特征?
2.在坐标平面内如何求一个点的坐标?已知点的坐标,如何在坐标平面内描
出这个点?
【知识结构】
活动四:
随堂训练,课
堂总结
【作业布置】
1.教材P69习题9.1第1,3,4,5,8题.
2.《创优作业》主体本部分相应课时训练.、
9.1.1 平面直角坐标系的概念
1.构成:在平面内由两条互相垂直、原点重合的数轴构成,通常横轴向右为
板书设计 正方向,纵轴向上为正方向.
2.平面直角坐标系中点的坐标特征
3.由点写出坐标 由坐标描点.
本节课通过类比数轴表示点的方法,让学生认识平面直角坐标系,在概
念及由点确定坐标的基础上,进一步探究了点的坐标特点.本节课主要以问
教学反思 题为载体,概念方面不要死记硬背,要留给学生充足的探索思考时间,自己
描点寻找规律,让学生大胆发言,总结规律,从而提高学生的“数感”,充
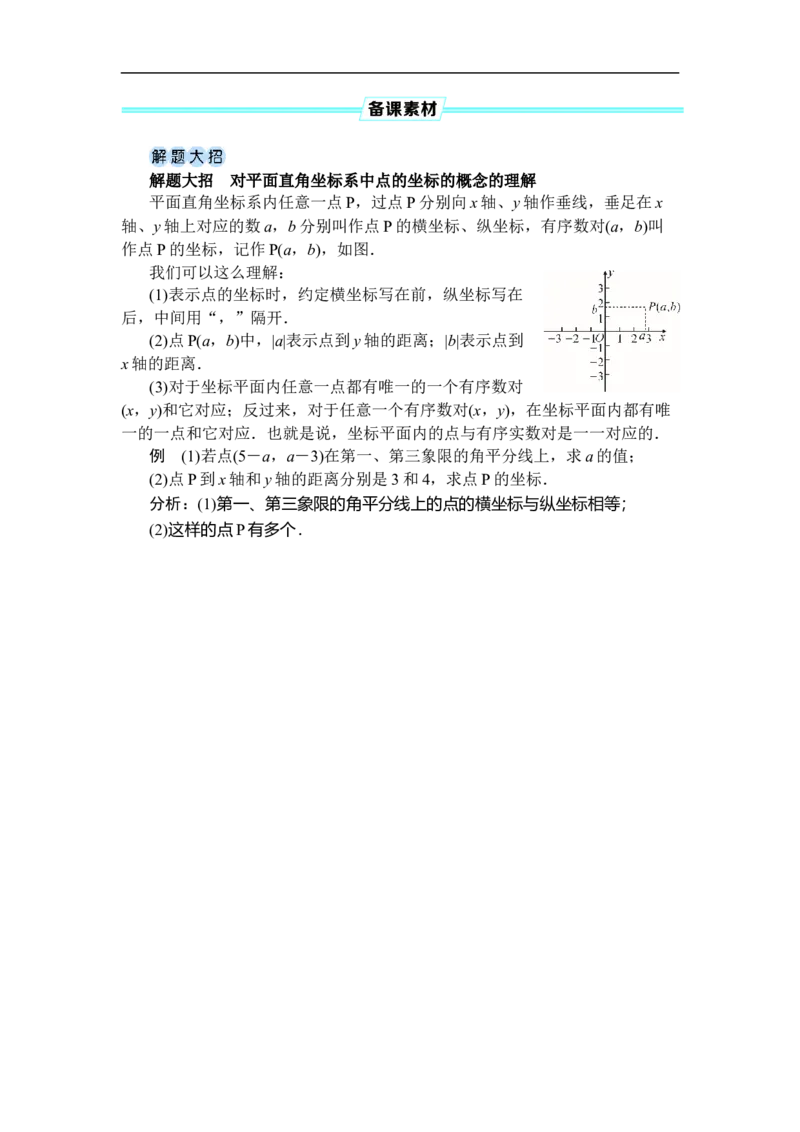
分体现新课标提出的“以学生为主体”的教学理念.解题大招 对平面直角坐标系中点的坐标的概念的理解
平面直角坐标系内任意一点P,过点P分别向x轴、y轴作垂线,垂足在x
轴、y轴上对应的数a,b分别叫作点P的横坐标、纵坐标,有序数对(a,b)叫
作点P的坐标,记作P(a,b),如图.
我们可以这么理解:
(1)表示点的坐标时,约定横坐标写在前,纵坐标写在
后,中间用“,”隔开.
(2)点P(a,b)中,|a|表示点到y轴的距离;|b|表示点到
x轴的距离.
(3)对于坐标平面内任意一点都有唯一的一个有序数对
(x,y)和它对应;反过来,对于任意一个有序数对(x,y),在坐标平面内都有唯
一的一点和它对应.也就是说,坐标平面内的点与有序实数对是一一对应的.
例 (1)若点(5-a,a-3)在第一、第三象限的角平分线上,求a的值;
(2)点P到x轴和y轴的距离分别是3和4,求点P的坐标.
分析:(1)第一、第三象限的角平分线上的点的横坐标与纵坐标相等;
(2)这样的点P有多个.解:(1)因为点(5-a,a-3)在第一、第三象限的角平分线上,所以5-
a=a-3,所以a=4.
(2)设点P的坐标为(x,y),由已知条件得|y|=3,|x|=4,所以y=±3,x=
±4,
所以点P的坐标为(4,3)或(-4,3)或(4,-3)或(-4,-3).
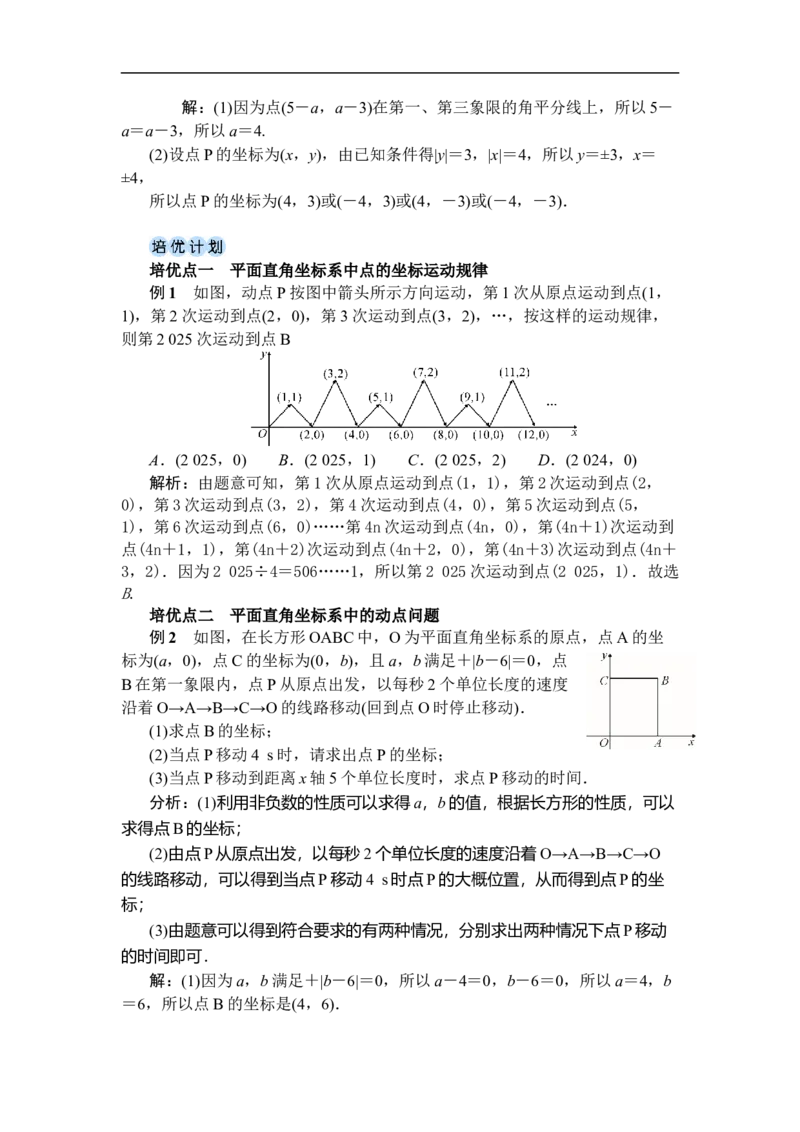
培优点一 平面直角坐标系中点的坐标运动规律
例1 如图,动点P按图中箭头所示方向运动,第1次从原点运动到点(1,
1),第2次运动到点(2,0),第3次运动到点(3,2),…,按这样的运动规律,
则第2 025次运动到点B
A.(2 025,0) B.(2 025,1) C.(2 025,2) D.(2 024,0)
解析:由题意可知,第1次从原点运动到点(1,1),第2次运动到点(2,
0),第3次运动到点(3,2),第4次运动到点(4,0),第5次运动到点(5,
1),第6次运动到点(6,0)……第4n次运动到点(4n,0),第(4n+1)次运动到
点(4n+1,1),第(4n+2)次运动到点(4n+2,0),第(4n+3)次运动到点(4n+
3,2).因为2 025÷4=506……1,所以第2 025次运动到点(2 025,1).故选
B.
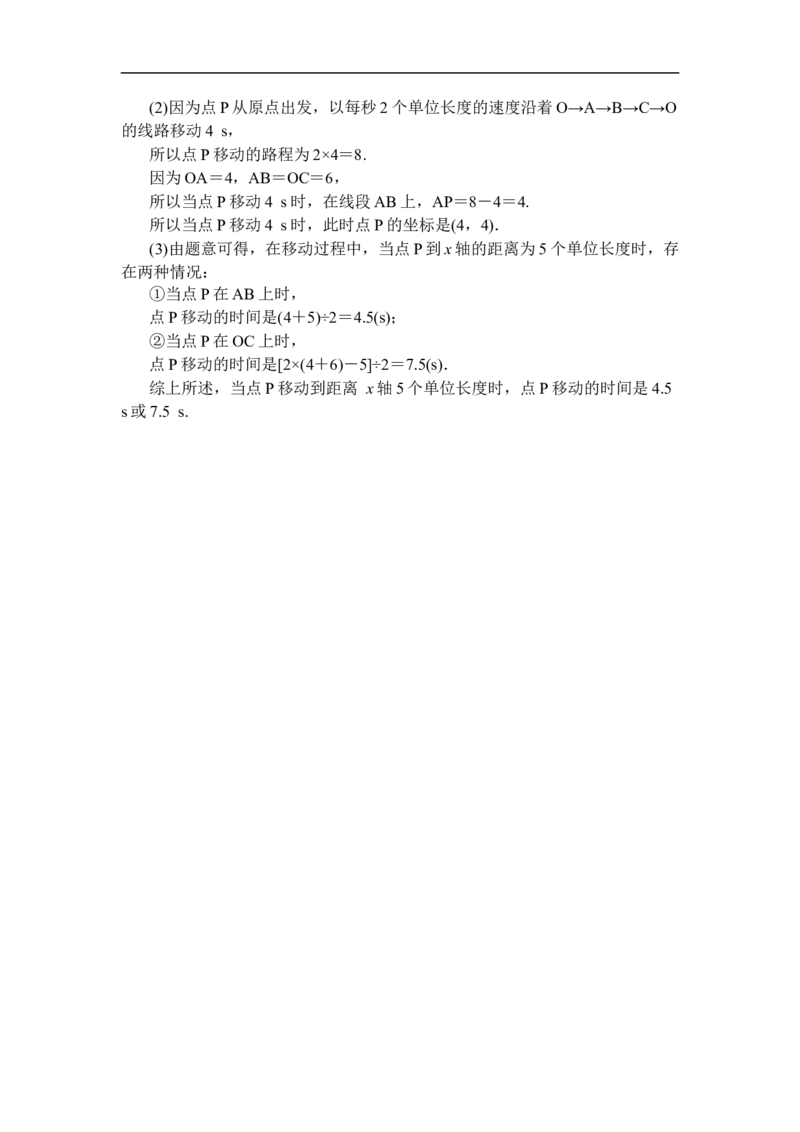
培优点二 平面直角坐标系中的动点问题
例2 如图,在长方形OABC中,O为平面直角坐标系的原点,点A的坐
标为(a,0),点C的坐标为(0,b),且a,b满足+|b-6|=0,点
B在第一象限内,点P从原点出发,以每秒2个单位长度的速度
沿着O→A→B→C→O的线路移动(回到点O时停止移动).
(1)求点B的坐标;
(2)当点P移动4 s时,请求出点P的坐标;
(3)当点P移动到距离x轴5个单位长度时,求点P移动的时间.
分析:(1)利用非负数的性质可以求得a,b的值,根据长方形的性质,可以
求得点B的坐标;
(2)由点P从原点出发,以每秒2个单位长度的速度沿着O→A→B→C→O
的线路移动,可以得到当点P移动4 s时点P的大概位置,从而得到点P的坐
标;
(3)由题意可以得到符合要求的有两种情况,分别求出两种情况下点P移动
的时间即可.
解:(1)因为a,b满足+|b-6|=0,所以a-4=0,b-6=0,所以a=4,b
=6,所以点B的坐标是(4,6).(2)因为点P从原点出发,以每秒2个单位长度的速度沿着O→A→B→C→O
的线路移动4 s,
所以点P移动的路程为2×4=8.
因为OA=4,AB=OC=6,
所以当点P移动4 s时,在线段AB上,AP=8-4=4.
所以当点P移动4 s时,此时点P的坐标是(4,4).
(3)由题意可得,在移动过程中,当点P到x轴的距离为5个单位长度时,存
在两种情况:
①当点P在AB上时,
点P移动的时间是(4+5)÷2=4.5(s);
②当点P在OC上时,
点P移动的时间是[2×(4+6)-5]÷2=7.5(s).
综上所述,当点P移动到距离 x轴5个单位长度时,点P移动的时间是4.5
s或7.5 s.

