当前时间: 2026-04-20 22:09:25
更新时间: 2026-04-20
分类:软件教程
评论(0)
AI公众号精选速览(2026.04.20)
AniGen由 VAST 与 香港大学 联合研发,能从 单张图片 直接生成带几何、 骨架结构 和 蒙皮权重 的可动画3D资产。它摒弃传统先生成、再绑骨流程,通过统一S^3 Fields表示实现几何与运动结构的联合生成,解决静态3D模型无法直接用于动画制作、 游戏开发 和 具身智能 的核心痛点。该技术在SIGGRAPH 2026发表,实验证明在骨架预测和蒙皮精度上显著领先,支持动物、机械臂等多类别对象的动态应用,大幅缩短从参考图到可驱动资产的流程。
本文揭示3D生成技术从静态外壳到可交互资产的关键突破,为动画、游戏及具身智能提供直接可用的解决方案。读者可掌握前沿技术路径,理解结构化生成对产业落地的核心价值,启发实际工作流优化。
存算一体 晶圆级集成 大模型推理 SRAM存算 KV缓存管理
中科院计算所团队提出 Ouroboros 方案,将 存算一体 与 晶圆级集成 创新结合,实现大模型推理的‘数据就地处理’。该芯片基于SRAM存算单元构建,集成54GB片上存储,彻底消除DRAM数据搬运开销。采用三层层次化设计:晶圆级统一内存平面、芯片级网格网络、存算核心微架构,并开发端到端推理框架优化权重映射与 KV缓存 管理。实验显示,系统吞吐量达15万tokens/s,平均吞吐量提升4.1倍,能效提升4.2倍,13B模型上吞吐量最高达9.1倍,为大模型硬件瓶颈提供突破性解决方案。
读者可深入理解存算一体与晶圆级集成的技术融合路径,掌握解决大模型数据搬运瓶颈的实操方案。文章提供具体实验数据与系统设计细节,对硬件研发者极具参考价值,能启发高效推理系统的设计思路。
华为支持的openJiuwen社区发布 JiuwenClaw 最新版,率先提出 Coordination Engineering 理念,解决多智能体协同难题。文章通过装修设计、200页技术PPT生成等实测案例,展示其 AgentTeam 能力:Leader智能编排任务,Teammate自主执行,依托 共享工作区 实现文件透明共享,并具备审批机制、事件驱动容错及持久化团队等全生命周期管控。核心技术实现分级协同与故障自愈,将多智能体协作从概念推向实战,显著提升复杂任务效率。
文章深度解析多智能体协同的工程化实践,提供可复用的团队编排框架与开源工具。读者能掌握解决实际协作痛点的方法论,启发智能体系统设计思路,对开发者构建高效AI团队具有直接参考价值。
制裁名单 多模态CAD重建 学术自由 开放科学原则 机构审查
文章揭露ICLR在录用论文为 Oral 后,因发现作者机构RAIRI(俄罗斯科学院人工智能研究所)被列入美国 制裁名单 而突然撤稿的事件。该论文提出 多模态CAD重建 模型cadrille,能融合点云、图像和文本输入生成可执行Python代码,在多个基准刷新SOTA。事件引发对 学术霸权 的质疑,对比NeurIPS类似风波,凸显政治干预对科学交流的冲击,挑战 开放科学原则 的存续。
文章深度剖析学术自由与政治制裁的冲突,揭示国际顶会合规困境,启发研究者关注学术环境风险。提供真实案例与多方观点,对科研工作者理解国际学术生态具有重要警示价值。
临界点发布三款灵巧手新品: OmniHand 3 Ultra-T 采用22+3自由度绳驱设计,实现0.3秒开合速度与300N输出力,首创 腱绳快拆机制 将维修时间压缩至10分钟内; OmniHand 3 Lite 以鼠标大小通过抗冲击测试,支持暴力砸地场景,开源版定价低于300美元; OmniPicker 3 夹爪强化工业可靠性,支持0.1N微力控与100万次带载开合。产品通过真实工厂部署验证,单次稳定运行8小时,解决灵巧手在具身智能中 脆弱性与成本 的核心痛点。
掌握灵巧手技术突破的关键路径,了解如何平衡高性能与工业可靠性。文章提供可复用的工程化方案,对机器人开发者优化抓取系统和降低落地成本具有直接参考价值。
菲尔兹奖得主Michael Freedman在最新论文中提出 数学压缩 是数学本质的核心观点,通过分析Lean的Mathlib库(50万行代码)发现:仅需600 token的命题可展开至10 104 规模的树状结构,揭示人类数学依赖 抽象层级 实现指数级信息压缩。文章以位值表示法、拉格朗日定理等为例,阐释 多项式增长 的幺半群如何支撑高效压缩,并探讨PageRank算法识别数学核心节点的方法,指出人类与AI需共同探索可压缩的 形式化库 结构以实现智能协作。
读者可深入理解数学与AI的底层关联,掌握压缩机制对优化模型推理的启发价值,为研究者提供人机协作新视角,具有显著的理论指导意义。
Anthropic编程智能体负责人Erik Schluntz详解Vibe Coding核心方法论。他指出真正的 氛围编程 需 彻底忘记代码存在 ,而非逐行审查AI生成内容。核心策略包括聚焦 叶子节点 管理技术债、担任AI的 产品经理 进行深度引导,并通过22000行代码生产环境合并案例,展示如何划定修改范围、建立可验证检查点。文章揭示在AI能力指数级增长下,工程师需转换思维以安全拥抱生产力革命。
掌握叶子节点策略与产品经理思维,可高效落地AI编程实践。22000行代码实战案例提供生产环境安全指南,助开发者规避技术债风险,显著提升工程效率,极具实操参考价值。
北京大学与南方科技大学联合团队提出 QuatRoPE 方法,突破大模型3D空间推理瓶颈。该研究针对物体关系编码可扩展性差、空间信息融合过早等核心问题,创新性地采用 四元数旋转 机制,将绝对坐标转化为相对位置关系,仅用线性长度输入即可承载二次方级空间关系。同时设计 IGRE隔离门控 机制减少位置嵌入干扰,并构建 ASR基准 精准评估纯空间推理能力。实验表明在ScanRefer等基准上性能显著提升,为具身智能提供关键技术支撑,相关成果已被CVPR 2026接收并开源。
掌握3D空间推理前沿技术突破,理解四元数旋转在位置编码中的创新应用。文章提供可复现的解决方案和严谨评估基准,对开发具身智能体和多模态大模型具有直接实践价值,能启发读者解决实际场景中的空间关系建模问题。
文章探讨AI编程从 Vibe Coding (如Cursor工具)到 Wish Coding (如蚂蚁灵光App)的演进。前者提升开发者编码效率,后者让普通人通过自然语言描述意图,直接生成可运行应用,无需处理代码配置、依赖管理等环节。核心技术包括 结构化意图表示层 和端侧原生运行环境,实现从想法到应用的闭环交付。实测显示用户一句话即可创建小程序,虽存在UI生硬等粗糙感,但功能可用,标志着软件工程正从精英制造转向 大众表达 ,为非技术用户提供创造数字工具的新路径。
文章揭示AI编程平民化的关键突破,帮助读者理解如何跨越技术门槛将创意转化为实际应用。对非开发者极具启发性,指明未来创造力将从代码能力转向意图表达能力,具有前瞻性实践价值。
长期记忆基准 多模态数据 个性化指代 记忆冲突 智能体系统
剑桥大学团队发布 ATM-Bench 基准,首次系统评估AI个人助理的长期记忆能力。该测试基于真实4年生活数据(含照片、视频、邮件等 多模态数据 ),设计 个性化指代 (如识别宠物名)、 多来源拼接 (对齐时间戳)及 记忆冲突 (处理矛盾票据)等核心挑战。实验显示:专用记忆系统准确率普遍低于20%,OpenClaw仅25.4%,Claude Code最高33.8%,揭示当前 智能体系统 在真实场景中的根本缺陷——即便配备完整工具链,仍难以实现可靠长期记忆。
文章通过严谨实验揭示AI记忆能力的真实瓶颈,帮助开发者认清技术局限,避免过度承诺。其开源数据集和方法论为个性化AI研究提供关键方向,对构建实用智能体具有重要指导价值。
QCon 2026北京站聚焦 AI驱动软件工程变革 ,汇聚2000余位开发者与60余家机构专家。核心探讨 超级智能体 时代软件重构:黄东旭提出代码从思考载体回归执行载体,需构建 多智能体架构 实现目标-上下文-约束框架;韦韬详解AI原生安全四大范式(HOP/NbSP等)应对系统性风险;阎栋强调 模型之外 的工程方法论,通过六层脚手架将大模型转化为生产系统。会议提炼五大高价值落地场景与工程化关键路径,揭示软件形态向意图驱动演进的趋势。
掌握智能体时代软件工程核心方法论,获取金融/零售等行业落地的量化指标与安全实践,避免AI应用陷入演示陷阱,提升技术决策的前瞻性与实操性。
文章揭露了Anthropic的 Claude Mythos 和OpenAI的 Spud 模型尚未正式上线,却已引发行业舆论狂热的现象。企业通过“模型太危险需限量开放”的营销套路制造稀缺感,导致开发者出现“ AI精神病 ”——对AI能力产生不切实际的焦虑。文中分析了OpenAI推出GPT-5.4-Cyber网络安全模型的策略及GPT-6传闻,揭示行业惯用的“放风-倒计时-高价上线”模式,指出这种炒作本质是将安全能力包装成新生意。
本文助你识破AI行业营销话术,避免陷入过度焦虑,培养对技术发展的理性认知。通过真实案例揭示行业运作逻辑,提升信息甄别能力,对从业者和爱好者均有警示价值。
Zendesk提出生成式AI已使代码生产不再是软件交付的主要制约因素,核心瓶颈转向组织的 吸收能力 。这一能力涵盖清晰定义问题、确保 架构一致性 (如边界划分与命名规范)、构建 验证机制 (含CI检测与分阶段发布),以及衡量 交付效能 (如前置时间与变更失败率)。文章指出AI会放大系统结构性问题:规范清晰的团队能高效吸收变更,而模糊架构则导致不一致性。四项应对措施包括产品与工程协同定义需求、强化验证闭环、制定架构规范框架、聚焦整体效能指标。
本文揭示AI时代研发新瓶颈本质,提供可落地的架构规范与验证策略。读者能掌握如何将AI生成代码转化为可靠价值,避免系统风险,对工程管理者提升团队效能具有直接实践指导意义。
L4级自动驾驶 机场场景 U-Drive系统 具身智能 出海战略
驭势科技作为 全球唯一 专注机场L4级自动驾驶的供应商,避开Robotaxi红海,专攻行李牵引车、摆渡车等封闭场景。创始人吴甘沙带领复旦背景团队,通过 U-Drive系统 实现900万公里无人里程,2026年港股IPO。文章解析其 机场场景 商业化路径:香港国际机场为样板,2025年卡塔尔试点,财务上营收三年增305%但累计亏损7.85亿。核心亮点是 具身智能 演进规划及80:20的 出海战略 ,揭示封闭场景比开放道路更易实现商业化闭环。
了解自动驾驶在封闭场景的务实商业化路径,对比Robotaxi的立法与信任难题,启发细分赛道选择。提供企业出海策略与技术演进(从AI司机到人形机器人)的实战参考,对行业从业者有实操价值。
二进制优化 酷睿Ultra 游戏本 Agentic AI 性能调度
英特尔创新性地将 CPU优化痛点 类比为 送外卖 场景:缓存未命中如送错餐、分支预测失败如盲目猜送。其推出的 二进制优化(IBOT) 技术通过内存内动态指令替换,消除CPU运行气泡,使《永劫无间》游戏性能提升19%。硬件上, 酷睿Ultra 200HX Plus 强化游戏体验,高静模式下噪音≤43dB、掌托温度<40°C。数据中心方面,DCG总经理KK指出 Agentic AI 浪潮将驱动CPU使用率激增,预测CPU-GPU比例达1:1,并强调务实优化与交付战略。
文章通过生动类比揭示芯片优化本质,提供IBOT技术实测数据及Agentic AI趋势预判,帮助开发者理解算力调度逻辑。英特尔务实的产品策略和行业洞察,对关注硬件性能与AI落地的从业者极具参考价值。
医疗世界模型 智能体操作系统 医生共创 多模态模型 独角兽融资
商汤医疗完成超5亿元战略融资,估值突破10亿美元,成为医疗AI领域独角兽。公司聚焦 医疗世界模型 赛道,构建以 Medical Agentic OS 为核心的技术底座,覆盖影像诊断、手术规划等200多个AI应用。通过 医生共创 模式,百人团队驱动数百款产品迭代,解决传统医疗AI泛化弱、交付重的痛点。已与全球500多家头部医院合作,日均AI使用率超80%,并推进东南亚、欧洲等全球化布局,探索医疗基础设施新范式。
文章揭示医疗AI落地新路径,智能体操作系统与医生共创模式显著提升行业效率,为从业者提供可复制的商业化思路,兼具技术深度与产业洞察,助力把握医疗AI升级机遇。
元数据联邦 统一编目 多模态存储 权限管控 Metalake架构
本文深度解析Apache Gravitino在AI时代的架构演进与治理实践。针对多云环境下数据碎片化与合规挑战,该开源项目通过 元数据联邦化 设计,实现对结构化表、非结构化文件及AI模型的统一编目管理。核心创新包括 Metalake架构 解耦存储层、支持Iceberg/Lance等多协议,以及 GVFS虚拟文件系统 屏蔽底层差异。最新1.1.0版本强化多模态AI存储与安全管控,1.2.0将引入UDF支持和Delta Lake集成,推动AI驱动的自动化数据治理。
文章系统性地揭示了元数据治理在AI基础设施中的核心价值,提供可落地的技术方案。读者能掌握应对数据碎片化的前沿架构设计,理解如何通过统一元数据层提升Data-AI协作效率,对构建合规高效的数据平台具有实操指导意义。
云开发平台 Vercel 因员工使用 AI 工具 Context.ai 遭黑客入侵,导致客户 环境变量 和 API 密钥 泄露。攻击者通过权限提升获取内部系统访问权限,并在论坛出售数据索要赎金。文章深入分析事件链条,同时揭示 AI 编程工具 (如 Claude Code)正成为技术栈的隐形决策者:研究显示其高度偏好 Vercel、Stripe 等工具,形成默认技术栈垄断,一旦平台出问题将放大安全风险。开发者呼吁加强密钥轮换并警惕 AI 代做技术决策的隐患。
文章通过真实安全事件揭示 AI 工具链风险,提供密钥轮换等实操建议,并深度剖析 AI 编程工具对技术生态的隐性控制,帮助开发者规避单点故障风险,兼具警示价值与行业洞察。
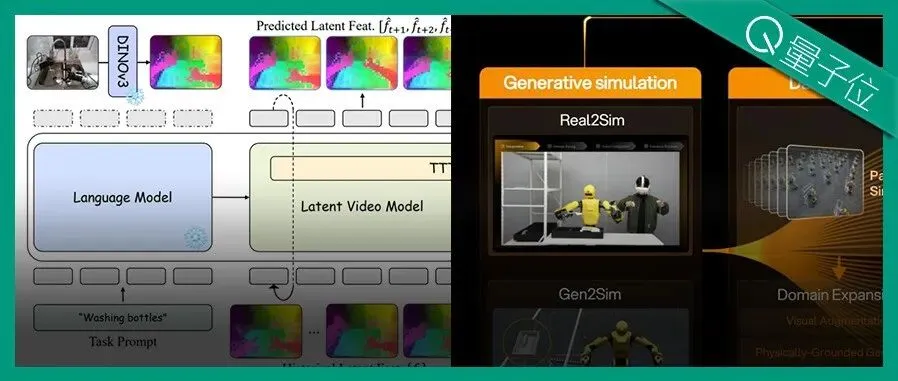
文章剖析了具身智能领域世界模型的评价误区:当前榜单过度关注视频生成质量,却忽视 机器人任务成功率 这一核心指标。跨维智能提出DexWorldModel技术方案,通过 因果潜空间表示 、双状态记忆机制、推测式异步推理和在线数据流四层协同,解决表示、记忆、推理与数据瓶颈。在RoboTwin仿真榜单中取得94%成功率,并实现 零样本仿真到真实 迁移,验证了以任务执行为导向的世界模型设计路径。
文章直指行业痛点,揭示视频质量与任务能力的弱相关性,提供具身智能落地的系统性技术路径。读者可掌握世界模型评价新标准及解决实际部署瓶颈的关键方法,避免研究方向偏差。
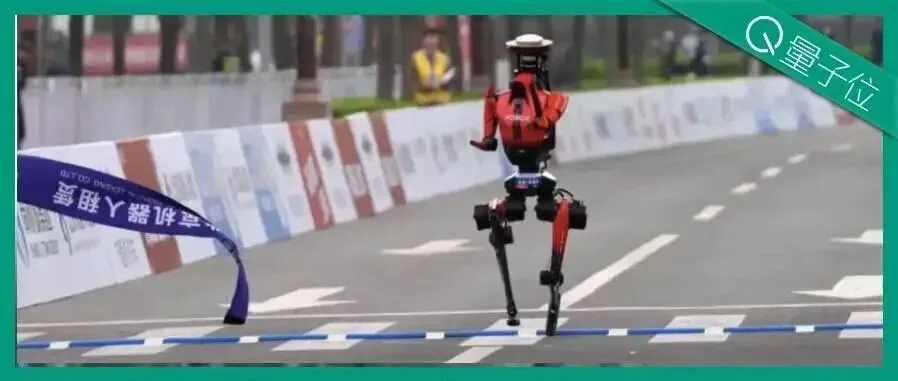
在亦庄人形机器人半程马拉松比赛中, 手机厂商荣耀 凭借自研机器人“闪电”以 50分26秒 夺冠,包揽前六名,大幅刷新去年2小时40分的纪录。该机器人身高169cm、体重45kg,采用峰值扭矩400牛·米的 自研关节模组 ,具备 自主感知导航 能力,甚至超越人类半马纪录。文章生动描述了赛场名场面:机器人摔倒自起、即兴跳舞等,并引发对机器人实用价值的讨论——评论区神图揭示其潜在应用场景。
文章以幽默视角展现人形机器人技术突破,通过真实赛事数据体现行业进步,启发读者思考具身智能的实用化路径,避免空洞技术论述,兼具趣味性与行业观察价值。
具身智能 仿真训练 zero-shot 抓取成功率 世界模型
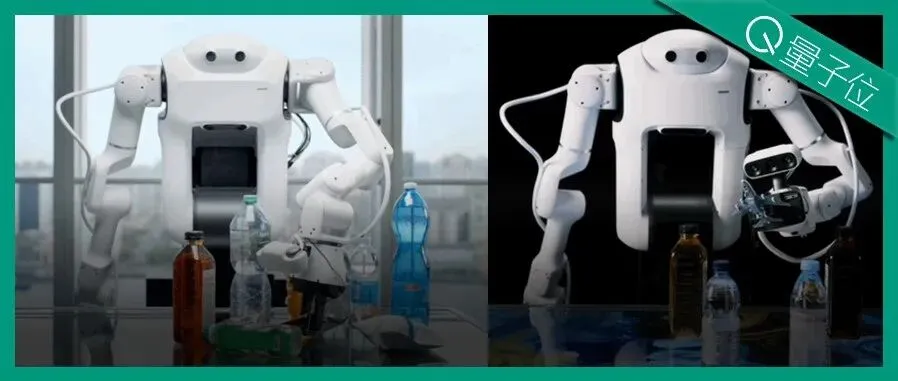
苏度科技发布首个具身模型#Sudo R1,在 0真机数据 训练下实现98%首次抓取成功率。该模型采用 纯仿真路线 ,通过世界模型与强化学习一体化设计,在60分钟连续测试中成功抓取透明、柔性、反光等100+未知物体,覆盖动态背景、空间约束等复杂场景。团队突破性地验证了 仿真数据 可独立支撑Sim2Real落地,解决行业数据供给与物理动力学刻画瓶颈,为具身智能规模化提供新路径。
文章揭示具身智能核心突破,展示零真机数据训练的可行性,对解决行业数据瓶颈有实操参考价值。读者可了解世界模型与强化学习融合的前沿方案,启发技术路线选择思考。
文章聚焦零犀科技如何利用 因果大模型 构建销售智能体,实现AI商业闭环。通过 后训练三步法 (训练对象更深、信号更强、闭环更完整),模型能像行业专家般精准决策,在保险等领域达成年新增保费20亿元的实绩。其创新的 RaaS模式 (按结果付费)跳过传统SaaS痛点,以保费增量等硬指标量化价值,2025年已实现规模盈利,验证了AI在销售场景的 业务闭环 可行性。
读者可获取AI落地销售场景的实操路径,了解因果大模型如何解决行业痛点,学习RaaS模式规避烧钱陷阱,对想探索AI商业化的从业者极具参考价值。
以上内容由 Double童发发 开发的 wechat-ai-daily自动生成
上一篇可下载丨2026春新版四年级下数学解决平均数问题易错题,电子版可打印
 夜雨聆风
夜雨聆风