



文档内容
专题 09 动力学三大观点
常考考点 真题举例
利用能量守恒解决实际问题 动量定理的内容和表达式 2024·广西·高考真题
利用动量守恒及能量守恒解决(类)碰撞问题 2024·浙江·高考真题
机械能与曲线运动结合问题 含有动量守恒的多过程问 2024·重庆·高考真题
题
机械能与曲线运动结合问题 完全弹性碰撞2:动碰动 2024·山东·高考真题掌握牛顿运动定律、动能定理、机械能守恒定律,动量定理、动量守恒定律,会计算恒力、变力的冲
量;
掌握动力学三大观点的选用规则;
掌握动力学三大观点图像问题的分析方法;
掌握动力学三大观点中的力学模型、电磁学模型,能够进行具体的分析和计算。
核心考点01 动力学三大观点的内容
一、动力学三大观点............................................................................................................................................3
二、动力学三大观点选用规则............................................................................................................................3
核心考点02 动力学三大观点涉及的图像.................................................................................................................4
一、图像类型.........................................................................................................................................................4
二、图像间的解题思路........................................................................................................................................4
核心考点03 动力学三大观点的应用——力学模型.................................................................................................6
一、小球弹簧模型.................................................................................................................................................6
二、轻绳连接体模型............................................................................................................................................7
三、滑块木板模型.................................................................................................................................................7
四、传送带模型...................................................................................................................................................10
五、滑块斜(曲)面模型..................................................................................................................................12
六、子弹木块模型...............................................................................................................................................13
七、用三大观点分析直线、平抛、圆周模型等综合问题..............................................................................13
核心考点04 动力学三大观点的应用——电磁学...................................................................................................15
一、三大观点在电学中的规律..........................................................................................................................15
二、三大观点在电磁感应中的规律..................................................................................................................15
二、电磁学中的模型..........................................................................................................................................16
核心考点 01 动力学三大观点的内容
一、动力学三大观点
1、内容分类 规律 表达式
动力学 力的瞬时 牛顿第二定律 F =ma
合
方法 作用 牛顿第三定律 F=-F′
动能定理 W =E -E
合 k2 k1
能量方 力的空间 E k1 +E p1 =E k2 +E p2 ;ΔE k =-ΔE p ;
机械能守恒定律
法 累积作用 ΔE =ΔE
A减 B增
能量守恒定律 E =E ;ΔE =ΔE
初 末 增 减
动量方 力的时间 动量定理 F 合 t=mv′-mv
法 累积作用 动量守恒定律 mv+mv=mv′+mv′
1 1 2 2 1 1 2 2
2、解题规律
动力学观点:运用牛顿运动定律结合运动学知识解题,可处理匀变速运动问题。
能量观点:用动能定理和能量守恒观点解题,可处理非匀变速运动问题。
动量观点:用动量守恒观点解题,可处理非匀变速运动问题,用动量定理可简化问题的求解过程。
二、动力学三大观点选用规则
1、根据物理量选取
若物体(或系统)涉及加速度的问题,一般要用牛顿运动定律。
若物体(或系统)涉及运动时间或作用时间的问题,一般优先考虑用动量定理,其次再考虑用牛顿运动
定律。
若物体(或系统)涉及初、末速度问题,一般优先考虑用功能关系,其次考虑用动量观点,最后再考虑
用牛顿运动定律。
若物体(或系统)涉及运动的位移或路程的问题,一般优先考虑用功能关系,其次再考虑用牛顿运动定
律。
若物体(或系统)涉及速度和时间,应考虑使用动量定理。
若物体(或系统)涉及位移和时间,且受到恒力作用,应考虑使用牛顿运动定律或动能定理。
若物体(或系统)涉及位移和速度,应考虑使用动能定理,系统中滑动摩擦力做功产生热量应用摩擦力
乘以相对位移,运用动能定理解决曲线运动和变加速运动问题特别方便。
若物体(或系统)不涉及物体运动过程中的加速度而涉及物体运动时间的问题,特别是对于打击类问题,
因时间短且冲力随时间变化,应用动量定理求解。
对于碰撞、爆炸、反冲、地面光滑的板—块问题,若只涉及初、末速度而不涉及力、时间,应用动量
守恒定律求解。
2、根据研究过程选取
涉及瞬间状态的分析和运动性质的分析:必须要用动力学观点。
涉及复杂的直线或曲线运动问题:要用能量观点或动量观点。
涉及短暂的相互作用问题:优先考虑用动量定理。
涉及碰撞、爆炸、反冲等问题:用动量守恒定律。
3、根据研究过程选取
若研究对象为单个物体,则不能用动量观点中的动量守恒定律。若研究对象为多物体系统,且系统内的物体与物体间有相互作用,一般用“守恒定律”去解决问题,
但必须注意研究对象是否满足定律的守恒条件。
若多个物体的运动状态不同,则一般不宜对多个物体整体应用牛顿运动定律。
4、系统化思维方法
对多个物理过程进行整体思考,即把几个过程合为一个过程来处理,如用动量守恒定律解决比较复杂
的运动。
对多个研究对象进行整体思考,即把两个或两个以上的独立物体看成为一个整体进行考虑,如应用动
量守恒定律时,就是把多个物体看成一个整体(或系统)。
核心考点 2 动力学三大观点涉及的图像
一、图像类型
1、动力学图像
v-t图像(面积表示位移),a-t图像(面积表示速度的改变量), a-F图像等。
2、动量图像
F-t图像(面积表示冲量),p-t图像等。
3、能量图像
F-x图像(面积表示功),E-x图像(斜率为合外力),E -x图像(如果E 表示重力势能则斜率
k p p
为重力;如果E 表示弹性势能则斜率为弹力;如果E 表示电势能则斜率为电场力),E-x图像(斜率为F
p p
)
合
二、图像间的解题思路
1、联系桥梁
加速度a是v-t图像和F -t图像联系的桥梁。
2、图像题解题策略
观察图像的横、纵坐标所代表的物理量及单位;
确认横、纵坐标是不是从0开始以及横、纵坐标的单位长度;
分析图像中的曲线形状,理解图像中的斜率,面积,截距,交点,拐点,渐近线的物理意义。
图像的斜率:体现某个物理量的大小、方向及变化情况。
图像的面积:由图线、横轴,有时还要用到纵轴及图线上的一个点或两个点到横轴的垂线段所围图形
的面积,一般都能表示某个物理量。
图像的截距:纵轴上以及横轴上的截距有时表示某一状态物理量的数值。
图像的交点:往往是解决问题的切入点。
图像的转折点:满足不同的函数关系式,对解题起关键作用。
图像的渐近线:往往可以利用渐近线求出该物理量的极值。
3、图像的两类分析
已知物体在某个物理过程中所受的某个力随时间变化的图像,分析物体的运动情况;
已知物体在某个运动过程中速度、加速度随时间变化的图像,分析物体的受力情况。
4、电磁感应图像问题
解题关键:弄清初始条件、正负方向的对应变化范围、所研究物理量的函数表达式、进出磁场的转折点等是解决此类问题的关键。
解题步骤:①明确图像的种类,即是B-t图像还是Φ-t图像,或者E-t图像、I-t图像等;对切割
磁感线产生感应电动势和感应电流的情况,还常涉及E-x图像和I-x图像;②分析电磁感应的具体过程;
③用右手定则或楞次定律确定方向的对应关系;⑤结合法拉第电磁感应定律、闭合电路欧姆定律、牛顿运
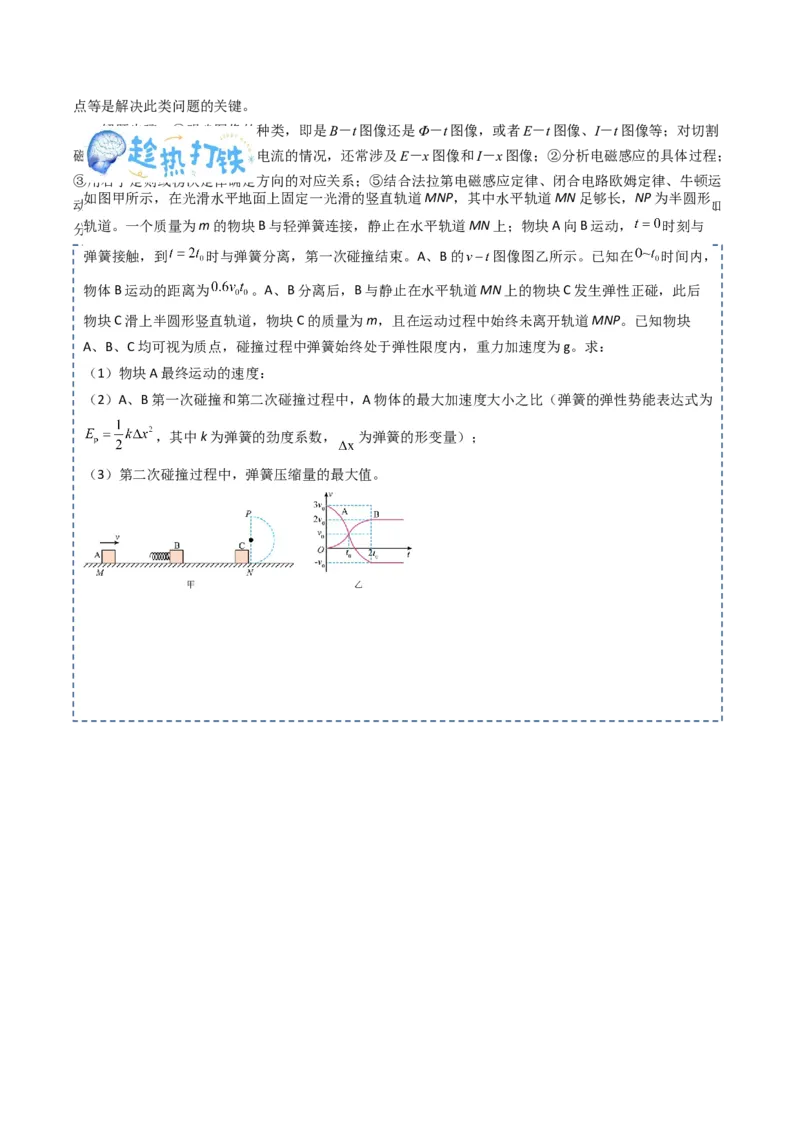
如图甲所示,在光滑水平地面上固定一光滑的竖直轨道MNP,其中水平轨道MN足够长,NP为半圆形
动定律、动能定理、动量守恒定律等知识写出相应的函数关系式;⑥根据函数关系式,进行数学分析,如
分轨析道斜。率一的个变质化量、为截m距的等物;块⑦对B与结轻果弹进簧行连分接析,和静讨止论在。水平轨道MN上;物块A向B运动, 时刻与
弹簧接触,到 时与弹簧分离,第一次碰撞结束。A、B的 图像图乙所示。已知在 时间内,
物体B运动的距离为 。A、B分离后,B与静止在水平轨道MN上的物块C发生弹性正碰,此后
物块C滑上半圆形竖直轨道,物块C的质量为m,且在运动过程中始终未离开轨道MNP。已知物块
A、B、C均可视为质点,碰撞过程中弹簧始终处于弹性限度内,重力加速度为g。求:
(1)物块A最终运动的速度:
(2)A、B第一次碰撞和第二次碰撞过程中,A物体的最大加速度大小之比(弹簧的弹性势能表达式为
,其中k为弹簧的劲度系数, 为弹簧的形变量);
(3)第二次碰撞过程中,弹簧压缩量的最大值。【答案】(1) ;(2) ;(3)
【详解】(1)由乙图知 后: ,B、C发生弹性碰撞,由动量守恒可知
由机械能守恒可知 ,联立解得 , ,C返回水平轨道时由机械能
守恒可知 ,C与B再次发生弹性碰撞 ,
解得 , ,A与B第一次碰撞到共速时,由动量守恒
可得 ,B与A第二次碰撞过程,由动量守恒可知
由机械能守恒可知 ,解得
(2)A与B第一次碰撞到共速时,由机械能守恒可知
A与B第二次碰撞到共速时,由动量守恒可知 ,解得
由机械能守恒可知 ,由以上公式得
两次加速度最大对应弹簧弹力最大,根据 ,可得
(3)A与B压缩弹簧过程 ,同一时刻A、B的瞬时速度关系为 ,
由位移等于速度对时间的积累得 , ,在 时间内 ,
由此得 , ,因此 ,可得 ,第二次碰撞过程中,弹簧
压缩量的最大值
核心考点 3 动力学三大观点的应用——力学模型
一、小球弹簧模型
1、模型示意图
2、模型的动力学分析3、模型的动力学图像
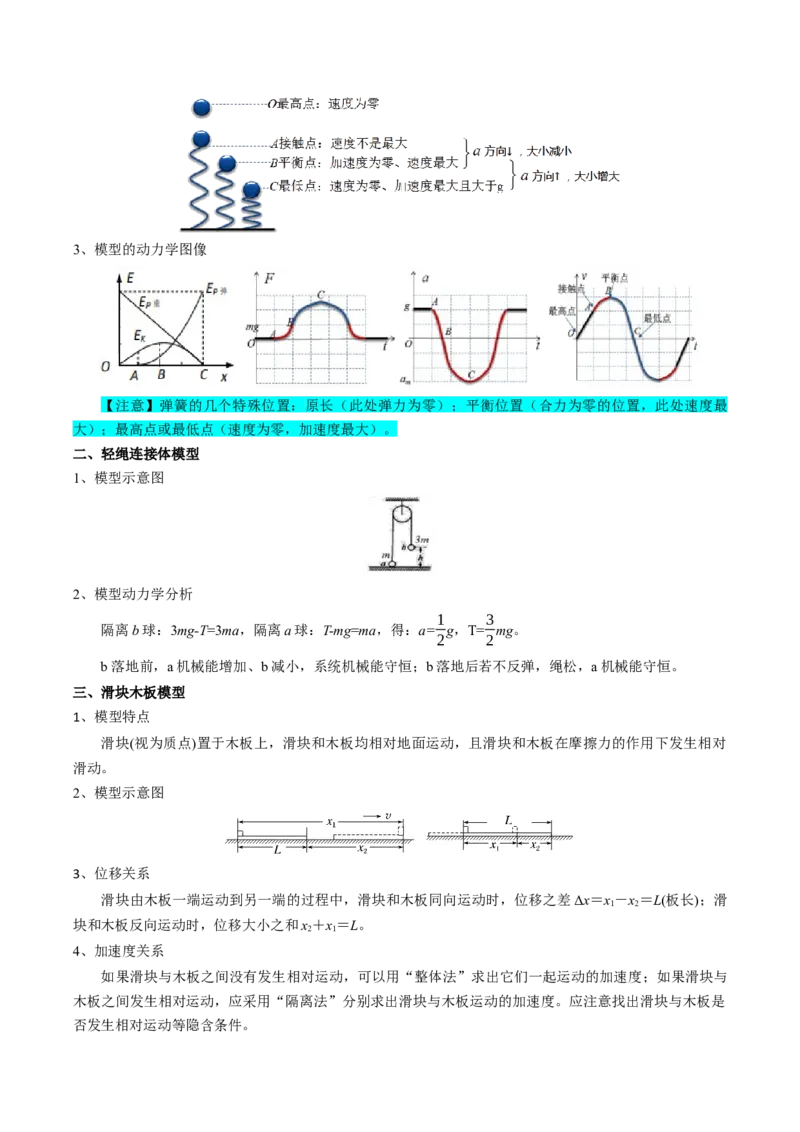
【注意】弹簧的几个特殊位置:原长(此处弹力为零);平衡位置(合力为零的位置,此处速度最
大);最高点或最低点(速度为零,加速度最大)。
二、轻绳连接体模型
1、模型示意图
2、模型动力学分析
1 3
隔离b球:3mg-T=3ma,隔离a球:T-mg=ma,得:a= g,T= mg。
2 2
b落地前,a机械能增加、b减小,系统机械能守恒;b落地后若不反弹,绳松,a机械能守恒。
三、滑块木板模型
1、模型特点
滑块(视为质点)置于木板上,滑块和木板均相对地面运动,且滑块和木板在摩擦力的作用下发生相对
滑动。
2、模型示意图
3、位移关系
滑块由木板一端运动到另一端的过程中,滑块和木板同向运动时,位移之差Δx=x -x =L(板长);滑
1 2
块和木板反向运动时,位移大小之和x+x=L。
2 1
4、加速度关系
如果滑块与木板之间没有发生相对运动,可以用“整体法”求出它们一起运动的加速度;如果滑块与
木板之间发生相对运动,应采用“隔离法”分别求出滑块与木板运动的加速度。应注意找出滑块与木板是
否发生相对运动等隐含条件。5、速度关系
滑块与木板之间发生相对运动时,明确滑块与木板的速度关系,从而确定滑块与木板受到的摩擦力。
应注意当滑块与木板的速度相同时,摩擦力会发生突变的情况。
6、动力学分析
滑块和木板组成的系统所受的合外力为零时,优先选用动量守恒定律解题;若地面不光滑或受其他外
力时,需选用动力学观点解题;应注意区分滑块、木板各自相对地面的位移和它们的相对位移。用运动学
公式或动能定理列式时位移指相对地面的位移;求系统摩擦生热时用相对位移(或相对路程)。
【注意】①用动力学观点分析模型时要抓住一个转折和两个关联:一个转折(滑块与木板达到相同速
度或者滑块从木板上滑下是受力和运动状态变化的转折点);两个关联(转折前、后受力情况之间的关联
和滑块、木板位移和板长之间的关联)。②用动量和功能观点分析模型要抓住一个条件和两个分析及一个
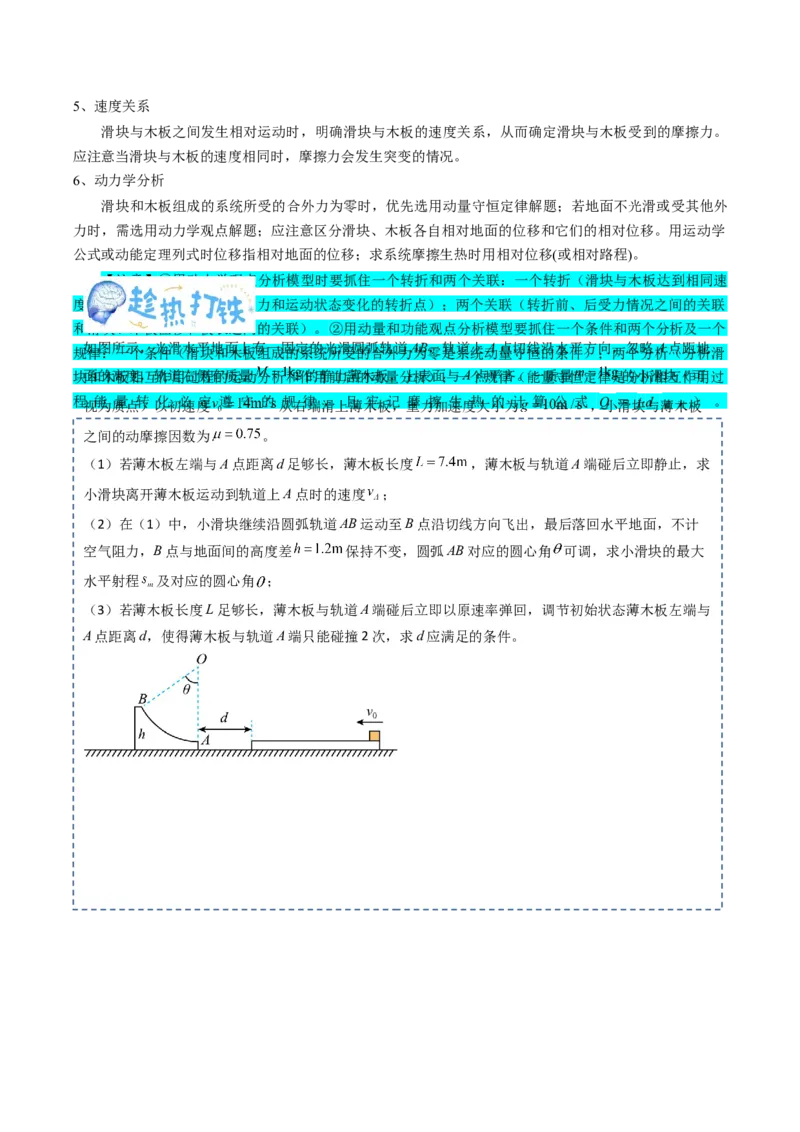
如图所示,光滑水平地面上有一固定的光滑圆弧轨道AB,轨道上A点切线沿水平方向,忽略A点距地
规律:一个条件(滑块和木板组成的系统所受的合外力为零是系统动量守恒的条件);两个分析(分析滑
块面和的木高板度相,互轨作道用右过侧程有的质运量动分析和作的用静前止后薄的木动板量,分上析表)面;与一A个点规平律齐(。能一量质守量恒定律是的分小析滑相块互(作可用过
程 视 能 为质 量 点 转 )以 化 初 必 速度 定 遵 守 的 从 规 右 律 端滑 , 上 且 薄木 牢 板 记 ,重 摩 力 擦 加速 生 度 热 大小 的 为 计 算 公 式 ,Q小 = 滑块f·d与薄相木对板 ) 。
之间的动摩擦因数为 。
(1)若薄木板左端与A点距离d足够长,薄木板长度 ,薄木板与轨道A端碰后立即静止,求
小滑块离开薄木板运动到轨道上A点时的速度 ;
(2)在(1)中,小滑块继续沿圆弧轨道AB运动至B点沿切线方向飞出,最后落回水平地面,不计
空气阻力,B点与地面间的高度差 保持不变,圆弧AB对应的圆心角 可调,求小滑块的最大
水平射程 及对应的圆心角 ;
(3)若薄木板长度L足够长,薄木板与轨道A端碰后立即以原速率弹回,调节初始状态薄木板左端与
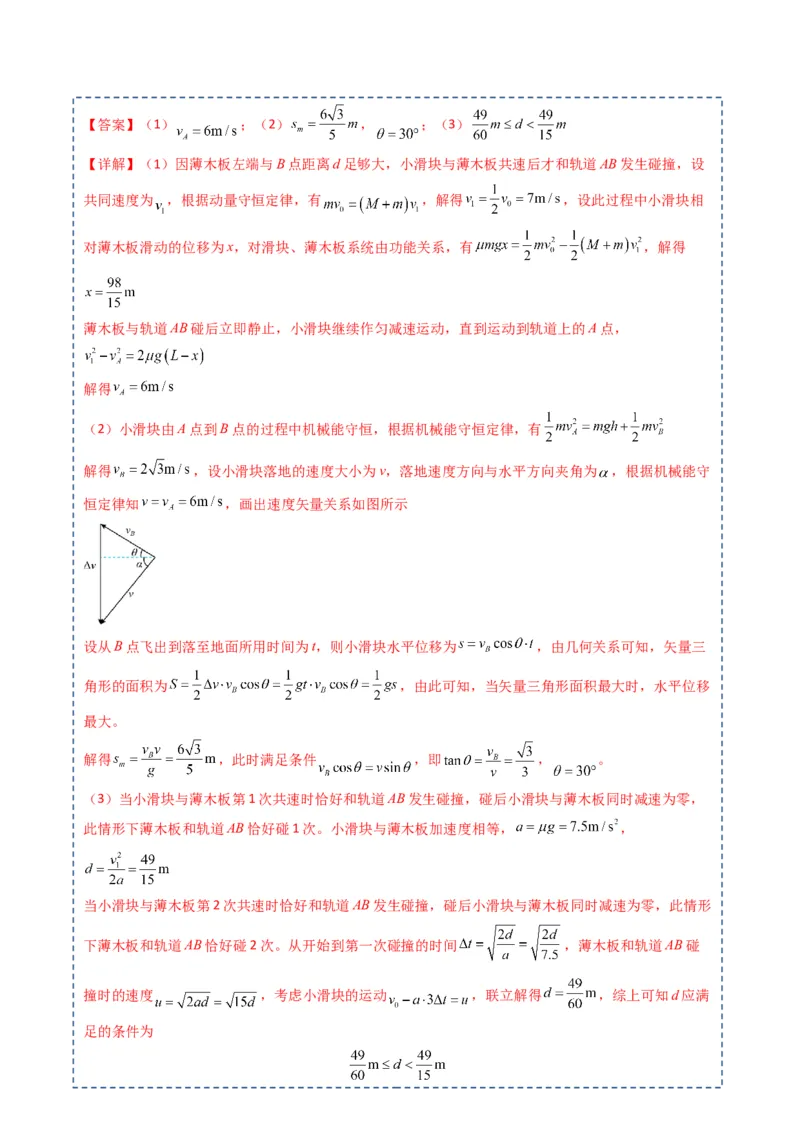
A点距离d,使得薄木板与轨道A端只能碰撞2次,求d应满足的条件。【答案】(1) ;(2) , ;(3)
【详解】(1)因薄木板左端与B点距离d足够大,小滑块与薄木板共速后才和轨道AB发生碰撞,设
共同速度为 ,根据动量守恒定律,有 ,解得 ,设此过程中小滑块相
对薄木板滑动的位移为x,对滑块、薄木板系统由功能关系,有 ,解得
薄木板与轨道AB碰后立即静止,小滑块继续作匀减速运动,直到运动到轨道上的A点,
解得
(2)小滑块由A点到B点的过程中机械能守恒,根据机械能守恒定律,有
解得 ,设小滑块落地的速度大小为v,落地速度方向与水平方向夹角为 ,根据机械能守
恒定律知 ,画出速度矢量关系如图所示
设从B点飞出到落至地面所用时间为t,则小滑块水平位移为 ,由几何关系可知,矢量三
角形的面积为 ,由此可知,当矢量三角形面积最大时,水平位移
最大。
解得 ,此时满足条件 ,即 , 。
(3)当小滑块与薄木板第1次共速时恰好和轨道AB发生碰撞,碰后小滑块与薄木板同时减速为零,
此情形下薄木板和轨道AB恰好碰1次。小滑块与薄木板加速度相等, ,
当小滑块与薄木板第2次共速时恰好和轨道AB发生碰撞,碰后小滑块与薄木板同时减速为零,此情形
下薄木板和轨道AB恰好碰2次。从开始到第一次碰撞的时间 ,薄木板和轨道AB碰
撞时的速度 ,考虑小滑块的运动 ,联立解得 ,综上可知d应满
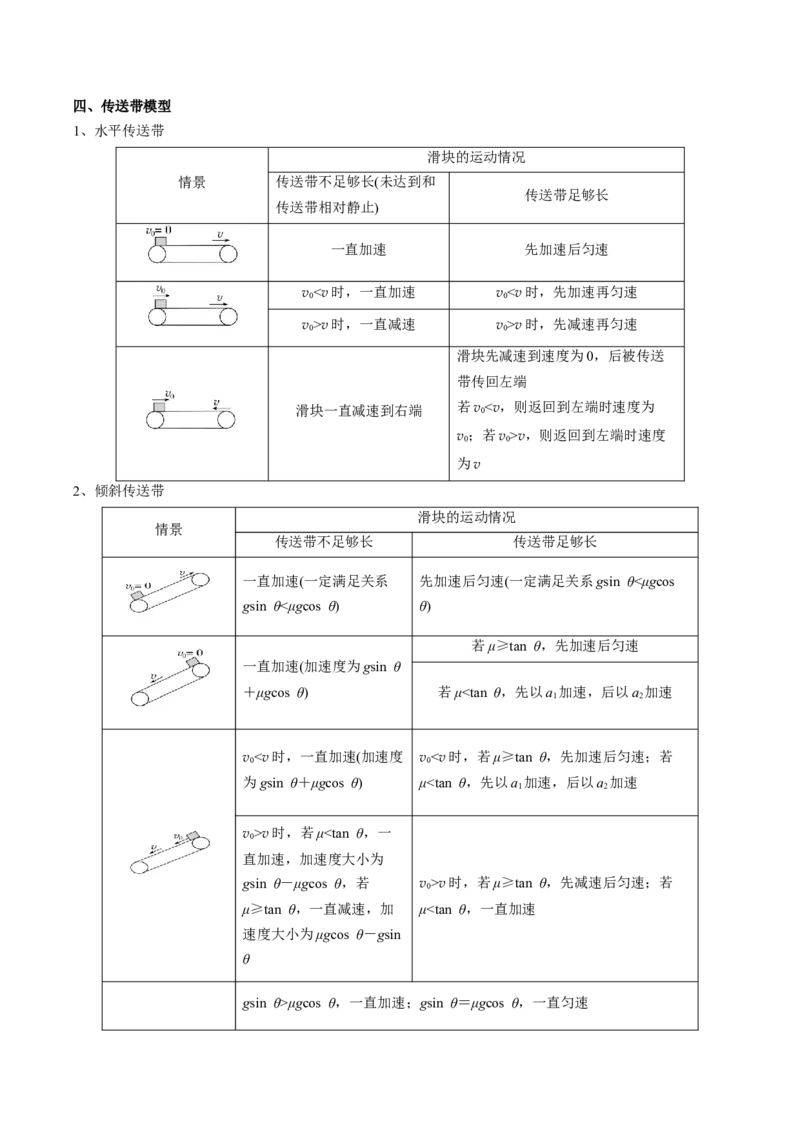
足的条件为四、传送带模型
1、水平传送带
滑块的运动情况
情景 传送带不足够长(未达到和
传送带足够长
传送带相对静止)
一直加速 先加速后匀速
vv时,一直减速 v>v时,先减速再匀速
0 0
滑块先减速到速度为0,后被传送
带传回左端
滑块一直减速到右端
若v
0
v,则返回到左端时速度
0 0
为v
2、倾斜传送带
滑块的运动情况
情景
传送带不足够长 传送带足够长
一直加速(一定满足关系 先加速后匀速(一定满足关系gsin θ<μgcos
gsin θ<μgcos θ) θ)
若μ≥tan θ,先加速后匀速
一直加速(加速度为gsin θ
+μgcos θ) 若μv时,若μv时,若μ≥tan θ,先减速后匀速;若
0
μ≥tan θ,一直减速,加 μμgcos θ,一直加速;gsin θ=μgcos θ,一直匀速gsin θ<μgcos θ,先减速到速度为0后反向
gsin θ<μgcos θ,一直减 加速,若v 0 ≤v,加速到原位置时速度大小
速 为v;若v>v,运动到原位置时速度大小为
(摩擦力方向一定沿 0 0
v
斜面向上)
3、动力学分析
静摩擦力做功的特点:①静摩擦力可以做正功,也可以做负功,还可以不做功;②相互作用的一对静
摩擦力做功的代数和总是等于零,不会转化为内能。
滑动摩擦力做功的特点:①滑动摩擦力可以做正功,也可以做负功,还可以不做功;②相互间存在滑
动摩擦力的系统内,一对滑动摩擦力做功之和的绝对值等于产生的内能。
摩擦生热的计算:①Q=F·s ,其中s 为相互摩擦的两个物体间的相对路程;②传送带因传送物
f 相对 相对
体多消耗的能量等于物体增加的机械能与系统产生的内能之和。
【注意】动力学角度:首先要正确分析物体的运动过程,做好受力分析,然后利用运动学公式结合牛
顿第二定律求物体及传送带在相应时间内的位移,找出物体和传送带之间的位移关系;能量角度:求传送
带对物体所做的功、物体和传送带由于相对滑动而产生的热量、因放上物体而使电动机多消耗的电能等,
常
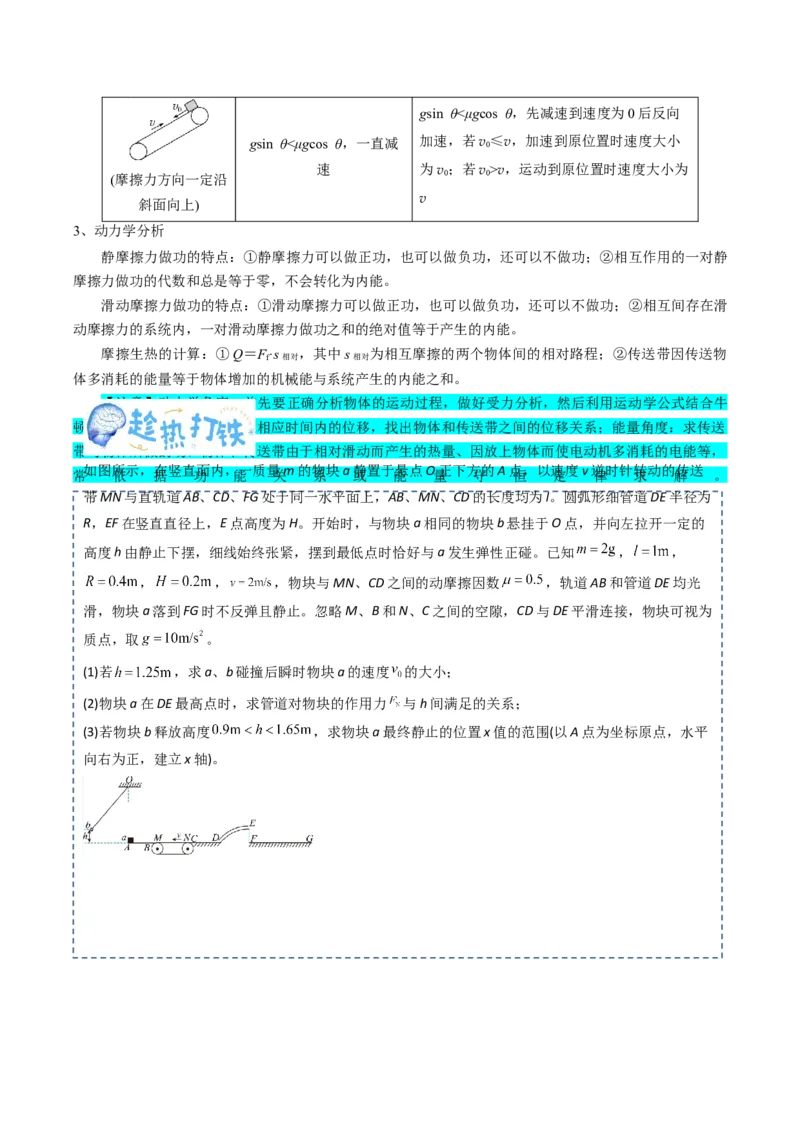
如图所
依
示,
据
在竖直
功
面内,
能
一质量 关m的物
系
块a静
或
置于
能
悬点O量 正下方
守
的A点
恒
,以速
定
度v逆
律
时针转
求
动的
解
传送
。
带MN与直轨道AB、CD、FG处于同一水平面上,AB、MN、CD的长度均为l。圆弧形细管道DE半径为
R,EF在竖直直径上,E点高度为H。开始时,与物块a相同的物块b悬挂于O点,并向左拉开一定的
高度h由静止下摆,细线始终张紧,摆到最低点时恰好与a发生弹性正碰。已知 , ,
, , ,物块与MN、CD之间的动摩擦因数 ,轨道AB和管道DE均光
滑,物块a落到FG时不反弹且静止。忽略M、B和N、C之间的空隙,CD与DE平滑连接,物块可视为
质点,取 。
(1)若 ,求a、b碰撞后瞬时物块a的速度 的大小;
(2)物块a在DE最高点时,求管道对物块的作用力 与h间满足的关系;
(3)若物块b释放高度 ,求物块a最终静止的位置x值的范围(以A点为坐标原点,水平
向右为正,建立x轴)。【答案】(1) ;(2) ;(3)当 时,
,当 时,
【解析】(1)滑块b摆到最低点过程中,由机械能守恒定律 ,解得
与 发生弹性碰撞,根据动量守恒定律和机械能守恒定律可得 ,
联立解得
(2)由(1)分析可知,物块 与物块 在 发生弹性正碰,速度交换,设物块 刚好可以到达 点,高度
为 ,根据动能定理可得 ,解得 ,以竖直向下为正方向
由动能定理 ,联立可得
(3)当 时,物块位置在 点或 点右侧,根据动能定理得
从 点飞出后,竖直方向 ,水平方向 ,根据几何关系可得 ,联立解得
,代入数据解得 ,当 时,从 释放
时,根据动能定理可得 ,解得 ,可知物块达到距离 点0.8m处静止,滑块a
由E点速度为零,返回到 时,根据动能定理可得 ,解得 ,距离 点
0.6m,综上可知当 时, ,代入数据得 。
五、滑块斜(曲)面模型
1、模型示意图
2、动力学分析
上升到最大高度时:m与M具有共同的水平速度v ,此时m的竖直速度v=0。系统水平方向动量守
共 y
恒:mv =(M+m)v ,系统机械能守恒:mv2=(M+m)v 2+mgh,其中h为滑块上升的最大高度,不一定
0 共 0 共
等于轨道的高度(相当于完全非弹性碰撞,系统减少的动能转化为m的重力势能)。
返回最低点时:m与M的分离点.相当于完成了弹性碰撞,分离瞬间m与M的速度可以用弹性碰撞中一动碰一静的结论得到水平方向动量守恒:mv =mv +Mv ,系统机械能守恒:mv2=mv2+Mv 2,相当于完
0 1 2 0 1 2
成了弹性碰撞。
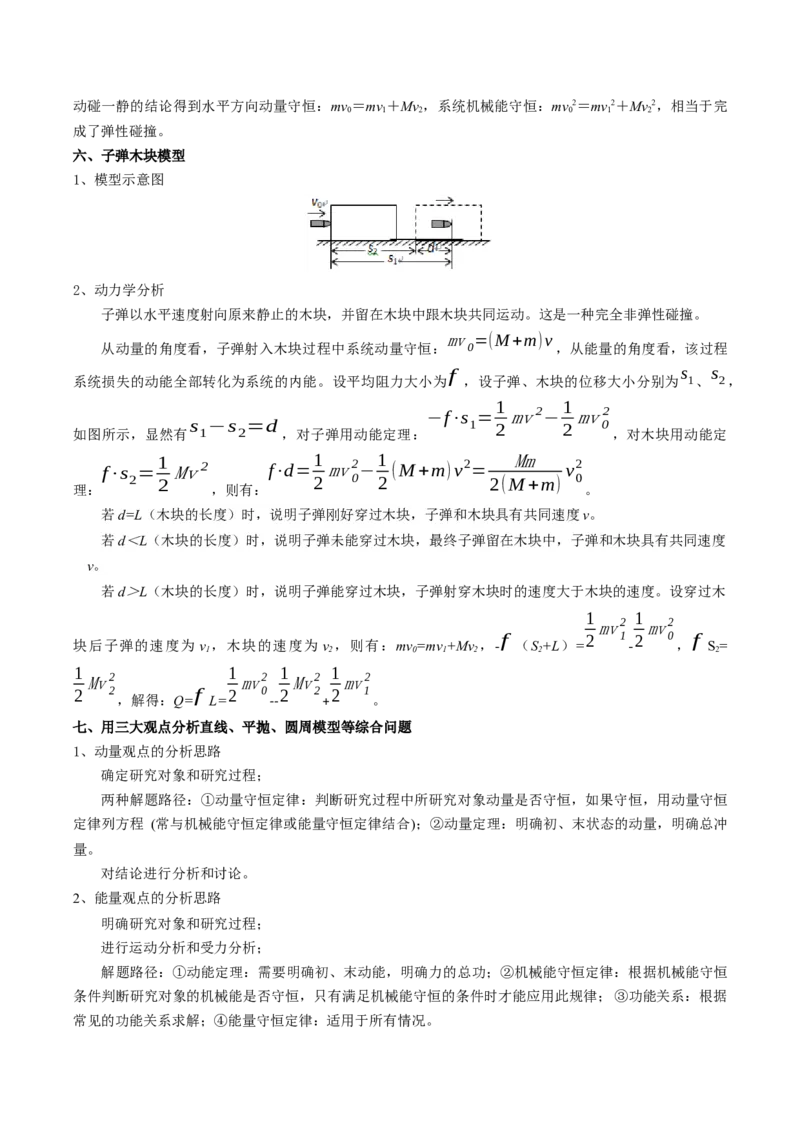
六、子弹木块模型
1、模型示意图
2、动力学分析
子弹以水平速度射向原来静止的木块,并留在木块中跟木块共同运动。这是一种完全非弹性碰撞。
mv =(M+m)v
从动量的角度看,子弹射入木块过程中系统动量守恒: 0 ,从能量的角度看,该过程
f s s
系统损失的动能全部转化为系统的内能。设平均阻力大小为 ,设子弹、木块的位移大小分别为 1、 2,
1 1
−f⋅s = mv2 − mv2
s −s =d 1 2 2 0
如图所示,显然有 1 2 ,对子弹用动能定理: ,对木块用动能定
1 1 1 Mm
f⋅s = Mv2 f⋅d= mv2 − (M+m)v2 = v2
2 2 2 0 2 2(M+m) 0
理: ,则有: 。
若d=L(木块的长度)时,说明子弹刚好穿过木块,子弹和木块具有共同速度v。
若d<L(木块的长度)时,说明子弹未能穿过木块,最终子弹留在木块中,子弹和木块具有共同速度
v。
若d>L(木块的长度)时,说明子弹能穿过木块,子弹射穿木块时的速度大于木块的速度。设穿过木
1 1
mv2 mv2
f 2 1 2 0 f
块后子弹的速度为 v ,木块的速度为 v ,则有:mv=mv +Mv ,- (S+L)= - , S=
1 2 0 1 2 2 2
1 1 1 1
Mv2 mv2 Mv2 mv2
2 2 f 2 0 2 2 2 1
,解得:Q= L= -- + 。
七、用三大观点分析直线、平抛、圆周模型等综合问题
1、动量观点的分析思路
确定研究对象和研究过程;
两种解题路径:①动量守恒定律:判断研究过程中所研究对象动量是否守恒,如果守恒,用动量守恒
定律列方程 (常与机械能守恒定律或能量守恒定律结合);②动量定理:明确初、末状态的动量,明确总冲
量。
对结论进行分析和讨论。
2、能量观点的分析思路
明确研究对象和研究过程;
进行运动分析和受力分析;
解题路径:①动能定理:需要明确初、末动能,明确力的总功;②机械能守恒定律:根据机械能守恒
条件判断研究对象的机械能是否守恒,只有满足机械能守恒的条件时才能应用此规律;③功能关系:根据
常见的功能关系求解;④能量守恒定律:适用于所有情况。对结论进行分析和讨论。
【注意】多体问题:选取研究对象和寻找相互联系是求解多体问题的两个关键。选取研究对象后需根
据不同的条件采用隔离法,即把研究对象从其所在的系统中抽离出来进行研究;或采用整体法,即把几个
研究对象组成的系统作为整体进行研究;或将隔离法与整体法交叉使用。通常,符合守恒定律的系统或各
部分运动状态相同的系统,宜采用整体法;在需讨论系统各部分间的相互作用时,宜采用隔离法;对于各
部分运动状态不同的系统,应慎用整体法。至于多个物体间的相互联系,通常可从它们之间的相互作用、
运动的时间、位移、速度、加速度等方面去寻找。
多过程问题:观察每一个过程特征和寻找过程之间的联系是求解多过程问题的两个关键。分析过程特
征需仔细分析每个过程的约束条件,如物体的受力情况、状态参量等,以便运用相应的物理规律逐个进行
研究。至于过程之间的联系,则可从物体运动的速度、位移、时间等方面去寻找。
注重审题,深究细琢,综观全局重点推敲,挖掘并应用隐含条件,梳理解题思路或建立辅助方程,是
求解的关键。通常,隐含条件可通过观察物理现象、认识物理模型和分析物理过程,甚至从试题的字里行
间或图像中去挖掘。
解题时必须根据不同条件对各种可能情况进行全面分析,必要时要自己拟定讨论方案,将问题根据一
定的标准分类,再逐类进行探讨,防止漏解。
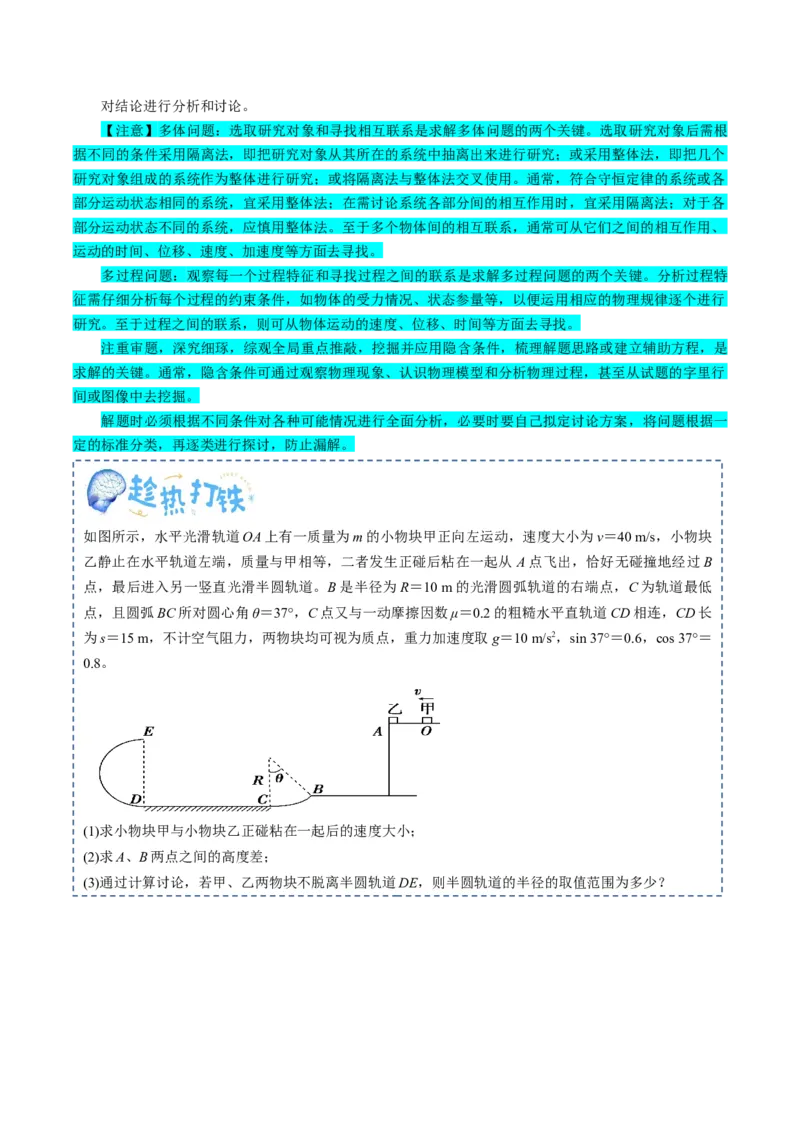
如图所示,水平光滑轨道OA上有一质量为m的小物块甲正向左运动,速度大小为v=40 m/s,小物块
乙静止在水平轨道左端,质量与甲相等,二者发生正碰后粘在一起从 A点飞出,恰好无碰撞地经过B
点,最后进入另一竖直光滑半圆轨道。B是半径为R=10 m的光滑圆弧轨道的右端点,C为轨道最低
点,且圆弧BC所对圆心角θ=37°,C点又与一动摩擦因数μ=0.2的粗糙水平直轨道CD相连,CD长
为s=15 m,不计空气阻力,两物块均可视为质点,重力加速度取g=10 m/s2,sin 37°=0.6,cos 37°=
0.8。
(1)求小物块甲与小物块乙正碰粘在一起后的速度大小;
(2)求A、B两点之间的高度差;
(3)通过计算讨论,若甲、乙两物块不脱离半圆轨道DE,则半圆轨道的半径的取值范围为多少?【答案】 (1)20 m/s (2)11.25 m (3)0<R′≤12.1 m或R′≥30.25 m
【解析】 (1)设小物块甲与小物块乙正碰粘在一起后的速度大小为 v ,由动量守恒定律有mv=(m+
0
m)v
0
解得v =20 m/s。(2)粘在一起的甲、乙两物块恰好无碰撞地经过B点进入圆弧轨道BC,可知甲、乙运
0
动轨迹和圆弧恰在B点相切,设A、B两点之间的高度差为h ,甲、乙两物块做平抛运动,在B点有
1
tan 37°=又v2=2gh 则可求得v=15 m/s,h =11.25 m。(3)由(2)中的分析可求得v =25 m/s,对甲、
y 1, y 1 B
乙两物块从B到D的过程,运用动能定理有 2mgR(1-cos 37°)-2μmgs=×2mv 2-×2mv 2,得v =11
D B D
m/s,设半圆轨道的半径为R′,若甲、乙两物块恰能到达半圆轨道的最高处,则从D点到E点有-
2mg×2R′=×2m()2-×2mv 2,得R′=12.1 m,即甲、乙两物块能通过半圆轨道最高点的条件为 0<R′≤12.1
D
m,若甲、乙两物块恰能到达半圆轨道圆心等高处,有-2mgR′=0-×2mv 2,得R′=30.25 m,即甲、
D
乙两物块不能到达半圆轨道圆心等高处以上的条件为R′≥30.25 m,综上所述,甲、乙两物块不脱离半
圆轨道的条件为0<R′≤12.1 m或R′≥30.25 m。
核心考点 4 动力学三大观点的应用——电磁学
一、三大观点在电学中的规律
1、电场规律
电场力的特点:F=Eq,正电荷受到的电场力与场强方向相同,负电荷受到的电场力与场强方向相反。
电场力做功的特点:W =FL cos θ=qU =E -E 。
AB AB AB pA pB
【注意】在多阶段运动过程中,当物体所受外力突变时,物体由于惯性而速度不发生突变,故物体在
前一阶段的末速度即为物体在后一阶段的初速度,对于多阶段运动过程中物体在各阶段中发生的位移之间
的联系,可以通过作运动过程草图来获得。动量守恒定律与其他知识综合应用类问题的求解,与一般的力
学问题求解思路并无差异,只是问题的情景更复杂多样,分析清楚物理过程,正确识别物理模型是解决问
题的关键。
二、三大观点在电磁感应中的规律
1、关系的转换
【注意】感应电流在磁场中受到安培力的作用,因此电磁感应问题往往跟力学问题联系在一起。解决
这类问题需要综合应用电磁感应规律(法拉第电磁感应定律、楞次定律)及力学中的有关规律(共点力的平衡
条件、牛顿运动定律、动能定理等)。
2、能量问题
能量问题:在电磁感应中,切割磁感线的导体或磁通量发生变化的回路将产生感应电动势,该导体或
回路就相当于电源;分析清楚有哪些力做功,就可以知道有哪些形式的能量发生了相互转化;根据能量守
恒列方程求解。
【注意】①源的分析:明确电磁感应所产生的电源,确定E和r;②路的分析:弄清楚串联和并联的关系,求出电流,确定安培力;③力的分析:分析杆和线圈受力情况,求出合力;④运动的分析:由力和
运动的关系,确定运动模型;⑤能量的分析:确定参与转化的能量形式,确定能量规律。
三、电磁学中模型
1、带电粒子在叠加场中的运动模型
叠加场:电场、磁场、重力场共存,或其中某两场共存。
洛伦兹力、重力并存:若重力和洛伦兹力平衡,则带电粒子做匀速直线运动;若重力和洛伦兹力不平
衡,则带电粒子将做复杂的曲线运动,因洛伦兹力不做功,故机械能守恒,由此可求解问题。
电场力、洛伦兹力并存(不计重力的粒子):若电场力和洛伦兹力平衡,则带电粒子做匀速直线运动;
若电场力和洛伦兹力不平衡,则带电粒子将做复杂的曲线运动,因洛伦兹力不做功,可用动能定理求解问
题。
电场力、洛伦兹力、重力并存:若三力平衡,一定做匀速直线运动;若重力与电场力平衡,一定做匀
速圆周运动;若合力不为零且与速度方向不垂直,将做复杂的曲线运动,因洛伦兹力不做功,可用能量守
恒定律或动能定理求解问题。
【注意】带电粒子在叠加场中受轻杆、轻绳、圆环、轨道等约束的情况下,常见的运动形式有直线运
动和圆周运动,此时解题要通过受力分析明确变力、恒力做功情况,并注意洛伦兹力不做功的特点,运用
动能定理、能量守恒定律结合牛顿运动定律求解。
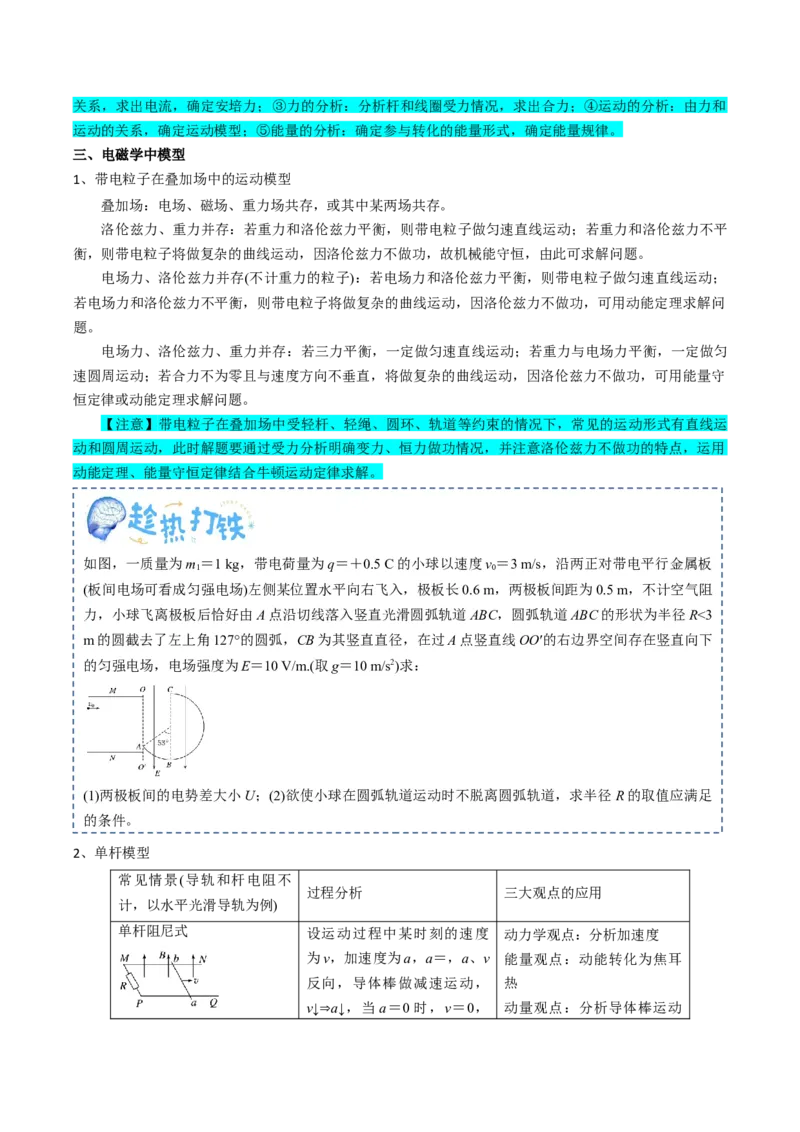
如图,一质量为m =1 kg,带电荷量为q=+0.5 C的小球以速度v =3 m/s,沿两正对带电平行金属板
1 0
(板间电场可看成匀强电场)左侧某位置水平向右飞入,极板长0.6 m,两极板间距为0.5 m,不计空气阻
力,小球飞离极板后恰好由A点沿切线落入竖直光滑圆弧轨道ABC,圆弧轨道ABC的形状为半径R<3
m的圆截去了左上角127°的圆弧,CB为其竖直直径,在过A点竖直线OO′的右边界空间存在竖直向下
的匀强电场,电场强度为E=10 V/m.(取g=10 m/s2)求:
(1)两极板间的电势差大小U;(2)欲使小球在圆弧轨道运动时不脱离圆弧轨道,求半径 R的取值应满足
的条件。
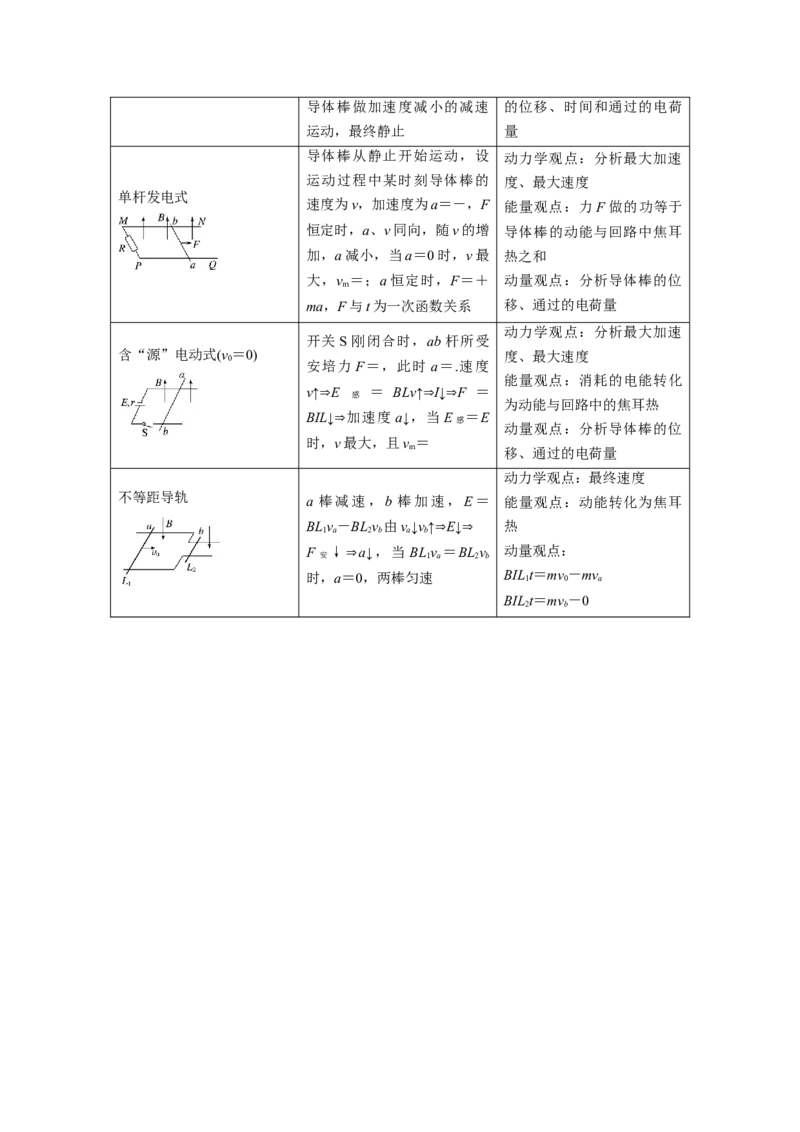
2、单杆模型
常见情景(导轨和杆电阻不
过程分析 三大观点的应用
计,以水平光滑导轨为例)
单杆阻尼式 设运动过程中某时刻的速度 动力学观点:分析加速度
为v,加速度为a,a=,a、v 能量观点:动能转化为焦耳
反向,导体棒做减速运动, 热
v↓⇒a↓,当a=0时,v=0, 动量观点:分析导体棒运动导体棒做加速度减小的减速 的位移、时间和通过的电荷
运动,最终静止 量
导体棒从静止开始运动,设 动力学观点:分析最大加速
运动过程中某时刻导体棒的 度、最大速度
单杆发电式
速度为v,加速度为a=-,F 能量观点:力F做的功等于
恒定时,a、v同向,随v的增 导体棒的动能与回路中焦耳
加,a减小,当a=0时,v最 热之和
大,v =;a恒定时,F=+ 动量观点:分析导体棒的位
m
ma,F与t为一次函数关系 移、通过的电荷量
动力学观点:分析最大加速
开关S刚闭合时,ab杆所受
含“源”电动式(v=0) 度、最大速度
0
安培力 F=,此时 a=.速度
能量观点:消耗的电能转化
v↑⇒E
感
= BLv↑⇒I↓⇒F =
为动能与回路中的焦耳热
BIL↓⇒加速度 a↓,当E
感
=E
动量观点:分析导体棒的位
时,v最大,且v =
m 移、通过的电荷量
动力学观点:最终速度
不等距导轨 a 棒减速,b 棒加速,E= 能量观点:动能转化为焦耳
BL v-BL v 由v↓v↑⇒E↓⇒ 热
1 a 2 b a b
F
安
↓⇒a↓,当 BL
1
v
a
=BL
2
v
b
动量观点:
时,a=0,两棒匀速 BIL
1
t=mv
0
-mv
a
BIL t=mv-0
2 b如图所示,两光滑平行长直导轨,间距为d,放置在水平面上,磁感应强度为B的匀强磁场与导轨平
面垂直,两质量都为m、电阻都为r的导体棒 、 垂直放置在导轨上,与导轨接触良好,两棒两导
体棒距离足够远, 静止, 以初速度 向右运动,不计导轨电阻,忽略感生电流产生的磁场,则(
)
A.导体棒 的最终速度为 B.导体棒 产生的焦耳热为
C.通过导体棒横截面的电量为 D.两导体棒的初始距离最小为
【答案】 D
【解析】A.根据楞次定律,导体棒 、 最终以相同的速度匀速直线运动,设共同速度为 ,水平
向右为正方向,根据动量守恒定律可得 ,解得 ,故A错误;
B.设导体棒 、 在整个过程中产生的焦耳热为 ,根据能量守恒定律可得
解得 ,导体棒 、 的电阻都为r,因此导体棒 产生的焦耳热为 故B错误;
C.对导体棒 ,由动量定理得 ,因为 ,故 ,因此通过导体棒横截面的电量
为
,故C错误;
D.当导体棒 、 速度相等时距离为零,则两棒初始距离最小,设最小初始距离为l,则通过导体棒
横截面的电量 ,解得 ,故D正确。
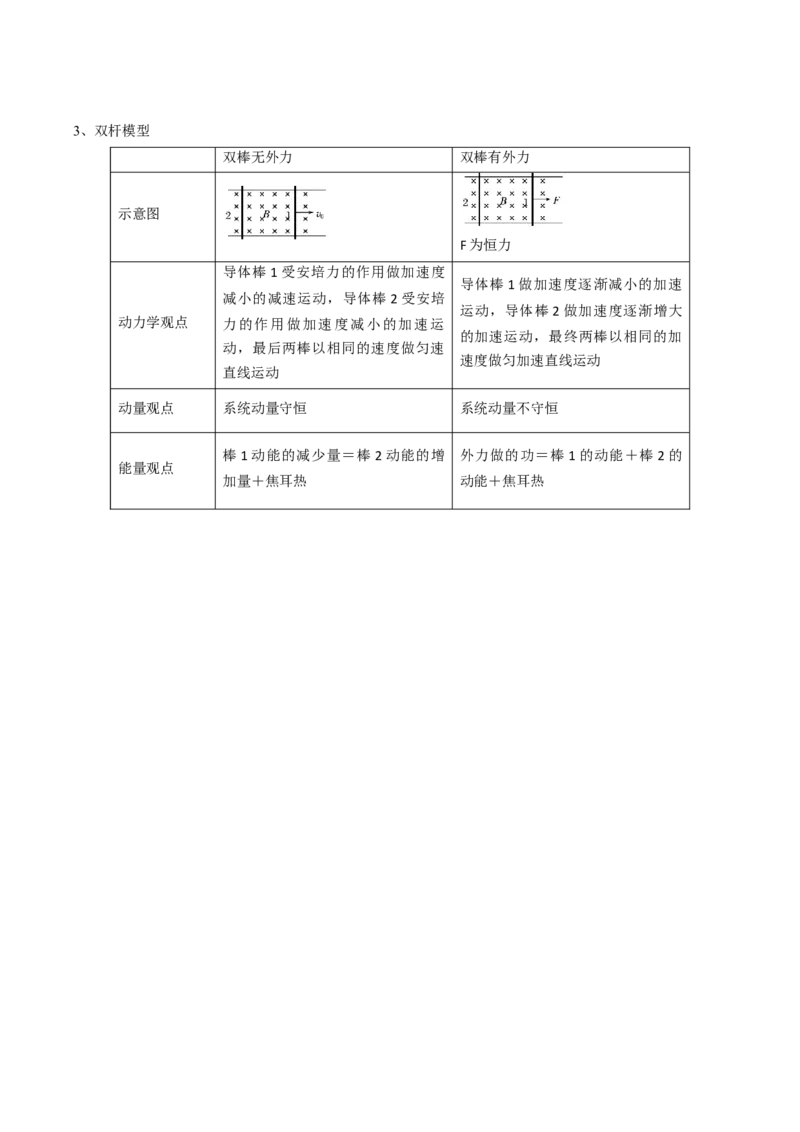
故选D。3、双杆模型
双棒无外力 双棒有外力
示意图
F为恒力
导体棒1受安培力的作用做加速度
导体棒1做加速度逐渐减小的加速
减小的减速运动,导体棒2受安培
运动,导体棒2做加速度逐渐增大
动力学观点 力的作用做加速度减小的加速运
的加速运动,最终两棒以相同的加
动,最后两棒以相同的速度做匀速
速度做匀加速直线运动
直线运动
动量观点 系统动量守恒 系统动量不守恒
棒1动能的减少量=棒2动能的增 外力做的功=棒 1的动能+棒2的
能量观点
加量+焦耳热 动能+焦耳热【注意】在双金属棒切割磁感线的系统中,双金属棒和导轨构成闭合回路,安培力充当系统内力,如
果它们不受摩擦力,且受到的安培力的合力为0时,满足动量守恒,运用动量守恒定律解题比较方便。解
决此类问题时通常将两棒视为一个整体,于是相互作用的安培力是系统的内力,这个变力将不影响整体的
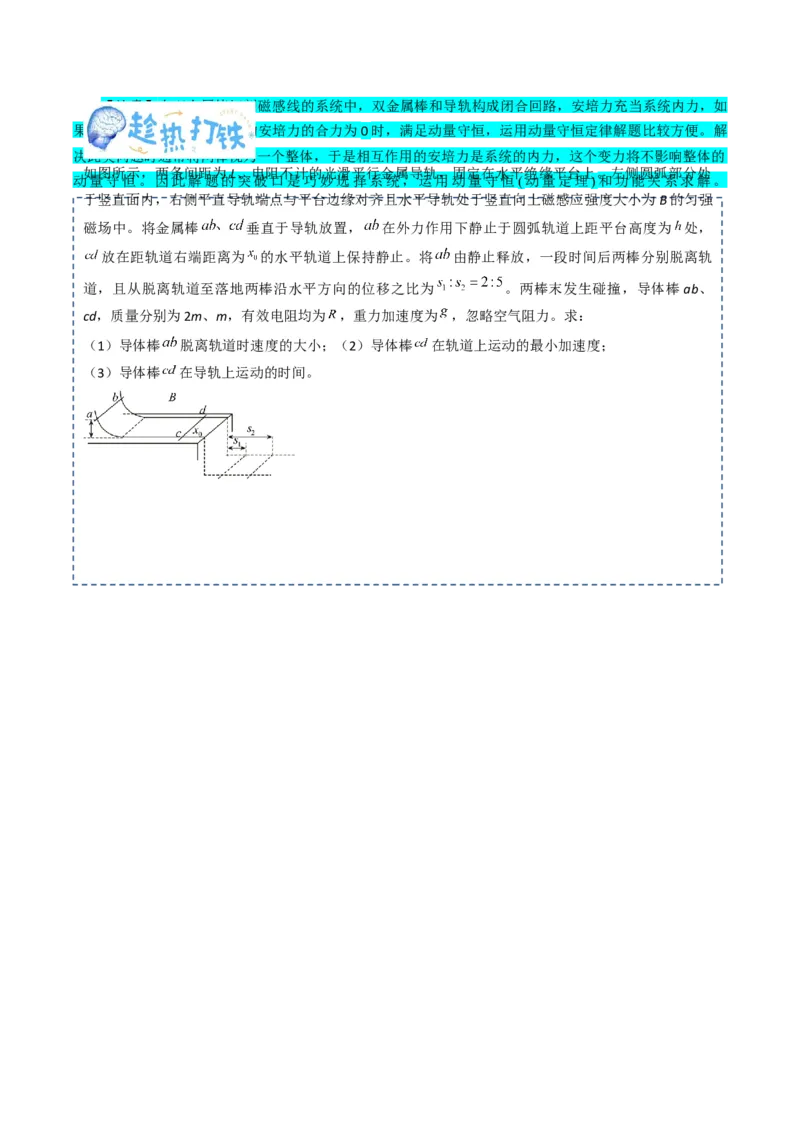
如图所示,两条间距为L、电阻不计的光滑平行金属导轨,固定在水平绝缘平台上。左侧圆弧部分处
动量守恒。因此解题的突破口是巧妙选择系统,运用动量守恒(动量定理)和功能关系求解。
于竖直面内,右侧平直导轨端点与平台边缘对齐且水平导轨处于竖直向上磁感应强度大小为B的匀强
磁场中。将金属棒 垂直于导轨放置, 在外力作用下静止于圆弧轨道上距平台高度为 处,
放在距轨道右端距离为 的水平轨道上保持静止。将 由静止释放,一段时间后两棒分别脱离轨
道,且从脱离轨道至落地两棒沿水平方向的位移之比为 。两棒末发生碰撞,导体棒ab、
cd,质量分别为2m、m,有效电阻均为 ,重力加速度为 ,忽略空气阻力。求:
(1)导体棒 脱离轨道时速度的大小;(2)导体棒 在轨道上运动的最小加速度;
(3)导体棒 在导轨上运动的时间。【答案】 (1) ;(2) ;(3)
【解析】(1) 棒由静止沿光滑圆弧轨道下滑至水平轨道的过程中,只有重力做功机械能守恒,故
有
,解得 ,随后, 棒进入匀强磁场切割磁感线产生感应电流,在安培力作
用下, 棒做加速度减小的减速运动, 棒做加速度减小的加速运动。由题意可知, 棒脱离轨道
前两棒并未共速,设 棒脱离轨道时的速度为 , 棒脱离轨道时的速度为 ,应有 ,因棒脱
离轨道后做平抛运动,故有 ,又因 两棒在水平轨道上相互作用的过程中,系统动量
守恒。所以 ,联立上述各式,解得 , 。
(2) 棒切割磁感线产生的感应电动势分别为 , 。由右手定则可知, 与
的方向相反。所以,回路的电动势为 ,由闭合电路欧姆定律可知,回路中
电流为 ,故, 棒所受安培力向右,大小为 ,受力分
析可知, 所受合外力即其受到的安培力。所以, 在离开轨道一刻加速度最小为
方向水平向右。
(3)金属棒 在水平轨道运动的过程中,系统动量守恒 ,随时间的积累,则有
,如图所示
且知 ,设 棒在轨道上运动的时间为 ,则在水平轨道上 棒相对 棒的位移为
,由 可得,整个过程中通过金属棒横截面的电荷量为
, 棒在轨道上运动,所受安培力即合外力,对其运用动量定理有
,联立上述两式,即可解得 。

