 夜雨聆风
夜雨聆风





技术文档 | SV4001 三维扫描声呐桥梁检测技术方案

阅读提示:
本文约4303字,阅读时间约11分钟,建议收藏或划线标记,以便随时回顾。
本文选自:探索海洋科技有限公司技术文档
文章脑图:
名词解释:
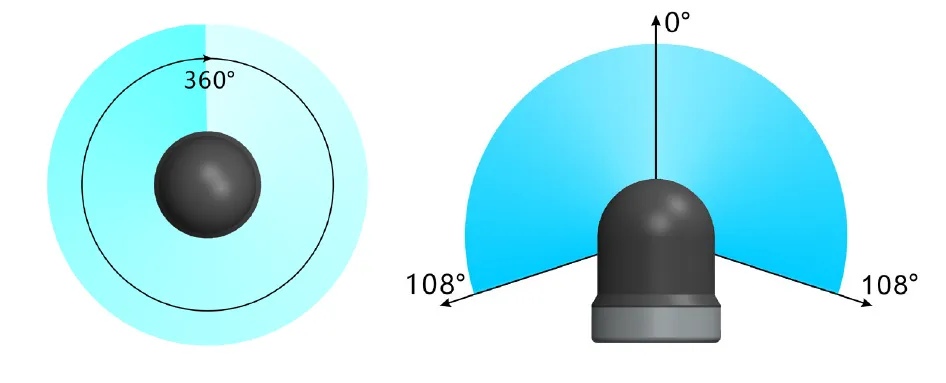
SV4001三维扫描声呐: 是一种单波束机械扫描三维成像声呐设备,通过水平向扫描范围θ轴360°与垂直向扫描范围φ轴0~108°旋转扫描构建水下结构的强度图和点云图,具备双频可切换、密封充油结构等特性。
桥墩水下结构检测: 针对桥梁承力结构的水下部分进行三维扫描,获取表面形貌、尺寸变化及破损情况,用于评估结构安全性的检测过程。
冲刷监测: 通过三维声呐扫描桥墩周围河床地形,定期对比分析冲刷深度、范围及体积变化,预防因基础土体流失引发的桥梁倾斜或崩塌风险。
正文内容:
1 项目背景与需求分析
1.1 桥梁水下检测的重要性
我国现有公路桥梁超过 100 万座,其中跨江跨河大中型桥梁数量众多。桥梁作为交通基础设施的关键节点,其安全状况直接关系到人民群众的生命财产安全。然而,桥梁水下部分——包括桥墩、承台、桩基、基础等结构——长期浸没在水中,受到水流冲刷、水质侵蚀、水下生物附着等多种因素的影响,是桥梁检测中最难、最关键的环节。
据统计,国内桥梁水下部分的检测主要依赖潜水员直接观察和触摸,这种方式存在显著不足:检测效率低、覆盖范围有限、安全风险高、数据难以量化和存档。因此,迫切需要一种高效、精确、安全的水下检测技术手段。
1.2 当前检测方法的局限性
传统桥梁水下检测方法主要包括潜水员视觉检查、水下摄像、多波束测声系统等。潜水员检查受限于能见度和水文条件,在浑水环境中几乎无法工作;水下摄像虽然能提供直观图像,但无法获取精确的三维尺寸信息;多波束测声系统体积大、价格高、部署复杂,难以在小型桥梁和常规检测中普及。
1.3 技术需求
结合桥梁水下检测的实际需求,理想的检测设备应具备以下特性:
-
体积小、重量轻,便于携带和部署
-
能够在浑水、低能见度环境下工作
-
提供精确的三维成像能力
-
具备足够的探测距离和分辨率
-
操作简便,降低对专业人员的依赖
-
成本可控,适合大规模推广应用
2.2 SV4001 三维扫描声呐设备概述
2.1 设备简介
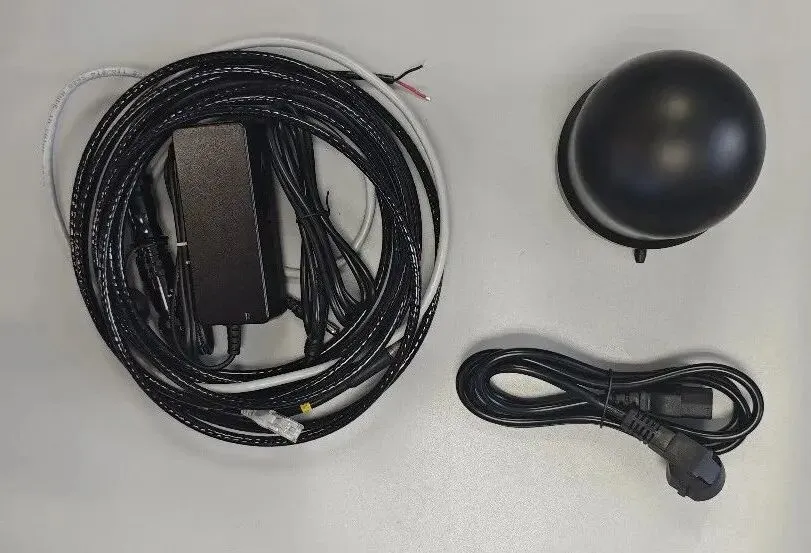
SV4001 是一款单波束机械扫描三维成像声呐,专为水下固定物体的三维轮廓扫描而设计。该设备采用密封充油结构,外部无旋转部件,有效避免了泥沙阻塞轴承和海草、鱼线缠绕的风险,特别适合在桥梁、海工等复杂水下环境中使用。
设备采用单波束二轴扫描方法工作,由两个电机带动声呐换能器沿 θ 轴和 φ 轴旋转,通过每个位置的回波构建场景的强度图和点云图。其中 θ 轴扫描范围为 360° 全向,φ 轴扫描范围为 0°~108°,可覆盖整个水体。

2.2 核心技术参数
|
参数项目 |
技术指标 |
|
中心频率 |
750kHz / 1MHz 双频可切换 |
|
波束宽度 |
750kHz:1.5°;1MHz:1° |
|
最大探测距离 |
750kHz:50m;1MHz:30m(强反射目标) |
|
距离分辨率 |
最小 1mm(量程相关) |
|
量程范围 |
1~50m,连续可调 |
|
最大工作水深 |
500m(更深可定制) |
|
水平扫描范围(θ 轴) |
360° 全向 |
|
垂直扫描范围(φ 轴) |
0~108° |
|
扫描分辨率 |
最高 0.1° |
|
扫描速度(网口版) |
最大 100 线/s |
|
发射信号 |
CW 或 CHIRP,自动/手动切换 |
|
工作盲区 |
≤ 0.2m |
|
输入电压 |
12~40V DC |
|
平均功耗 |
约 5W,峰值 < 10W |
|
通信接口 |
百兆以太网 / RS-485(可选) |
|
外形尺寸 |
Ø110(1) × 139(1) mm |
|
重量 |
约 1.8kg(空气)/ 0.9kg(水中) |
|
外壳材料 |
工程塑料 + 316 不锈钢 |
▲表 1:SV4001 三维扫描声呐核心技术参数
2.3 设备特点与优势
相比于市面上同类产品,SV4001 具有以下显著优势:
-
小型轻量:直径仅 110mm,空气中重量约 1.8kg,水中仅 0.9kg,可轻松搭载在小型 ROV、USV 或手持操作杆上,极大降低了对载体平台的要求。
-
密封充油结构:外部无任何旋转部件,彻底消除了泥沙、水草、鱼线缠绕等常见故障风险,特别适合河床、海底等复杂环境。
-
双频可切换:750kHz 提供更远的探测距离(最大 50m),1MHz 提供更高的分辨率(波束宽度 1°),可根据实际检测需求灵活选择。
-
低功耗设计:平均功耗仅 5W,可由小型电池供电,支持长时间水下作业,。
-
全向扫描能力:θ 轴 360° 全向扫描,配合 φ 轴 0°~108° 垂直扫描,可完整覆盖桥墩周围及水下结构。
3 桥梁检测应用方案
3.1 桥墩水下结构检测
桥墩是桥梁最关键的承力结构,其水下部分长期承受水流冲刷和侵蚀作用,是检测的重点区域。使用 SV4001 声呐可以对桥墩进行全方位三维扫描,获取桥墩的完整三维模型,包括表面形貌、尺寸变化、破损情况等关键信息。
具体操作方法:声呐可以通过手持杆和ROV进行布放,将声呐安装在手持操作杆上悬挂入水,如图1所示,也可以将声呐集成在ROV上,如图2所示。声呐的 θ 轴全向扫描可以在一次定位中获取桥墩周围所有方向的数据,配合 φ 轴的垂直扫描,可以完整覆盖桥墩从水面到河床的全部结构。
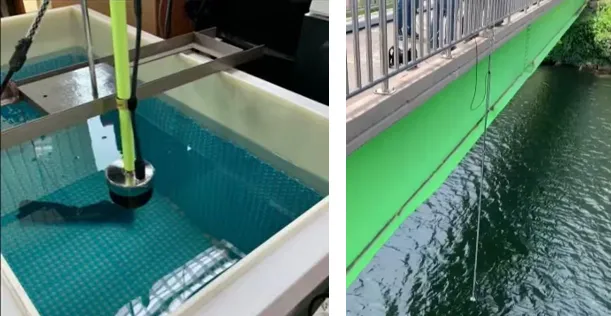
▲图1 SV4001手持干布放示意图
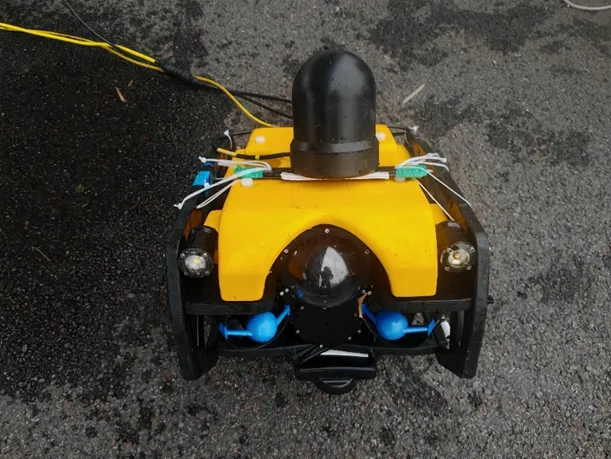
▲图2 探索海洋S100水下机器人搭载三维声呐
检测效果:可以精确获取桥墩的三维点云模型,分辨率达到厘米级别,能够发现表面裂缝、混凝土剥落、钢筋外露等缺陷,同时可以精确测量桥墩的几何尺寸和形变量。
▲图3 通过三维声呐能够精确测量桥墩的几何尺寸
3.2 桥梁基础冲刷监测
桥梁基础冲刷是威胁桥梁安全的主要因素之一。水流对桥墩周围河床的冲刷会导致基础土体流失,严重时可能引发桥梁倾斜甚至崩塔。传统的冲刷监测方法如扔石测深、回声测深仪等,只能获取单点数据,无法反映整体冲刷形态。
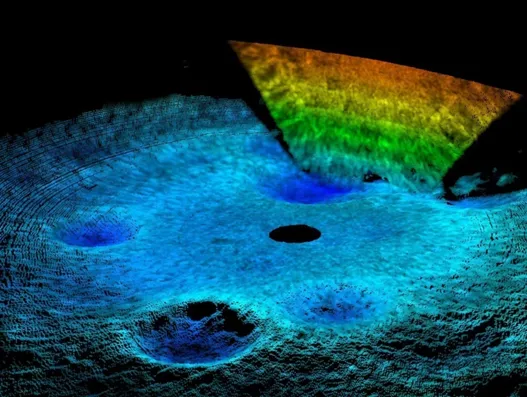
使用 SV4001 声呐可以对桥墩周围的河床地形进行三维扫描,生成三维地形模型。通过定期扫描并对比不同时期的数据,可以精确计算冲刷深度、冲刷范围和冲刷体积,为桥梁安全评估提供可靠的数据支撑。
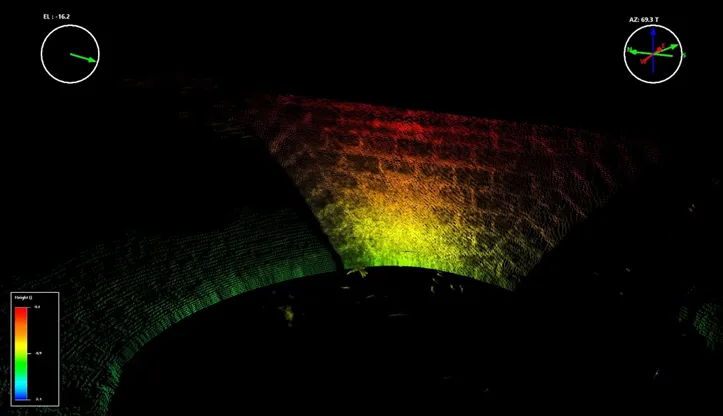
检测效果:可以获取桥墩周围 360° 范围内的河床地形三维模型,能够精确反映冲刷坑的形状、深度和变化趋势。
▲图4 水底高分辨率样貌
 ▲图5 结合光学和GIS,甚至可以实现水上和水下的信息融合
▲图5 结合光学和GIS,甚至可以实现水上和水下的信息融合
3.4 水下裂缝与缺陷检测
桥梁水下结构中的裂缝、剥落、空洞等缺陷是影响桥梁安全的重要因素。传统的水下裂缝检测主要依赖潜水员的视觉检查,受水质和能见度限制很大。
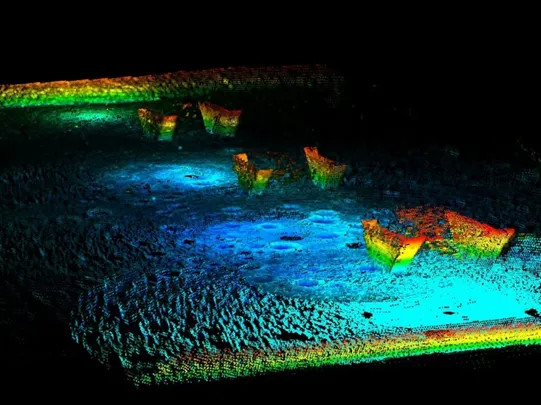
SV4001 声呐采用 1MHz 高频模式时,波束宽度仅为 1°,在 30m 范围内可以提供高分辨率的声学图像。通过对桥墩、承台等结构进行精密扫描,可以发现宽度 2cm 以上的表面裂缝,以及混凝土剥落、表面侵蚀等缺陷。声呐图像中的强度变化可以直观地显示缺陷位置和程度,为维修决策提供依据。
检测效果:可以生成桥墩表面的声学强度图,通过异常强度分布识别缺陷位置,并可以将声学图像与三维点云叠加,实现缺陷的精确定位和量化分析。
▲图6 水下裂缝与缺陷检测
4 系统部署与操作流程
4.1 设备安装方式
根据实际检测场景和条件,SV4001 声呐可采用以下几种安装方式:
|
安装方式 |
适用场景 |
特点说明 |
|
ROV 搭载 |
深水、大型桥梁 |
灵活机动,适合复杂环境,可实时观察 |
|
手持操作杆 |
小型桥梁、岸边检测 |
操作简便,成本低,适合快速检测 |
|
固定安装 |
长期监测站点 |
定点定时自动扫描,适合冲刷监测 |
▲表 2:SV4001 声呐安装方式对比
4.2 操作流程
完整的桥梁检测操作流程包括以下步骤:
步骤一:检测前准备
根据桥梁类型、水深、水质等条件,选择合适的工作频率和量程设置。深水环境优先使用 750kHz 以获取更远的探测距离,浅水精密检测使用 1MHz 以获得更高分辨率。同时检查设备状态、电缆连接、通信链路等。
步骤二:设备部署与定位
将声呐安装在选定的载体平台上,通过 M4 螺钉固定。将载体平台部署到桥墩下游位置,确保声呐与桥墩保持合适的距离(建议 2~10m,根据量程设置调整)。启动设备并进行通信测试,确认数据传输正常。
步骤三:数据采集
配置扫描参数:设置扫描范围(全景或扇区)、角度分辨率、扫描速度等。对于桥墩检测,建议采用全景扫描模式,角度分辨率设置为 0.5°~1°,以平衡数据质量和采集效率。沿桥墩周围多个位置进行扫描,确保全面覆盖。
步骤四:实时监控与质量控制
在数据采集过程中,通过上位机软件实时监控声呐图像质量。检查回波信号强度、图像清晰度、数据完整性等指标。如发现数据异常,及时调整设备参数或采集位置,确保采集到的数据满足质量要求。
步骤五:数据处理与分析
采集完成后,将数据导入后处理软件进行分析。主要包括:三维点云生成与可视化、强度图分析与异常识别、几何尺寸测量与变形分析、多期数据对比与变化趋势分析、检测报告自动生成等。
4.3 数据采集与处理
SV4001 声呐通过百兆以太网或 RS-485 接口将采集数据实时传输至上位机。网口版本最大扫描速度可达 100 线/s,能够满足实时成像的需求。采集的原始数据包括每个扫描点的距离、强度、角度等信息,可用于生成三维点云模型和声学强度图。
★后处理软件支持将原始数据转换为标准格式(如 PLY、OBJ、LAS 等),可与主流三维建模和 GIS 软件无缝对接。通过专业的数据分析工具,可以实现缺陷自动识别、冲刷体积计算、变形趋势分析等功能。

▲搭载三维声呐的探索海洋S200水下机器人
5 技术效果与优势分析
5.1 检测精度与覆盖范围
SV4001 声呐在桥梁检测中能够达到以下检测精度:
|
检测项目 |
检测精度 |
说明 |
|
几何尺寸测量 |
± 2cm |
桥墩直径、长度等 |
|
表面缺陷识别 |
最小 2cm |
裂缝、剥落、空洞等 |
|
冲刷深度测量 |
± 5cm |
桥墩周围冲刷坑 |
|
形变监测 |
± 1cm |
多期对比变化量 |
|
生物附着厚度 |
± 3cm |
藤壶、牺贝等附着层 |
▲表 3:检测精度指标
5.2 与传统检测方法对比
|
对比项目 |
潜水员检查 |
多波束测声 |
SV4001 三维声呐 |
|
工作环境 |
清水、浅水 |
各种水质 |
各种水质 |
|
探测距离 |
0~10m |
最大 200m |
最大 50m |
|
成像能力 |
二维图像 |
二维/三维 |
三维点云+强度图 |
|
设备体积 |
无 |
大型(>20kg) |
小型(Ø110mm) |
|
设备成本 |
人工费用高 |
几十万至百万 |
经济实惠 |
|
数据量化 |
困难 |
较好 |
优秀 |
|
检测效率 |
低 |
中等 |
高 |
▲表 4:与传统检测方法综合对比
5.3 核心优势总结
-
全向三维成像:360° 水平扫描配合 0°~108° 垂直扫描,一次定位即可获取桥墩周围全部结构信息,无需多次调整设备位置。
-
适应各种水质条件:声呐不受能见度限制,在浑水、低能见度环境下均可正常工作,克服了光学检测设备的固有局限。
-
数据可量化、可追溯:采集数据可生成标准格式的三维点云和声学图像,支持多期对比分析,为桥梁全生命周期管理提供数据支撑。
-
无人化作业:可搭载 ROV、USV 等无人载体,实现完全无人化检测,消除人员下水的安全风险。
-
经济高效:设备成本低、功耗低、操作简便,大幅降低检测成本,提高检测效率,适合大规模常规化检测应用。
关键问题与回答
-
SV4001如何实现浑水环境下的高精度三维成像?
通过750kHz/1MHz双频切换技术,在浑水环境中优先使用750kHz频段获取更远探测距离,同时采用1°波束宽度的1MHz模式进行精密扫描,结合360°水平扫描与-15°~90°垂直扫描,确保全向覆盖与高分辨率成像。
-
与多波束测声系统相比,SV4001的核心优势是什么?
SV4001体积仅Ø110mm×139mm,重量1.8kg,功耗5W,可搭载小型ROV/USV;而多波束系统体积>20kg,功耗高,部署复杂。SV4001在小型化、低功耗、成本控制方面具有显著优势。
-
如何保证检测数据的完整性和准确性?
采用五步操作流程:检测前参数预设、设备部署定位、多位置全景扫描、实时图像质量监控、后处理软件分析。通过0.5°~1°角度分辨率设置、100线/s扫描速度、百兆以太网实时传输,结合GIS软件对接,确保数据完整性和准确性。


