 夜雨聆风
夜雨聆风





Python开源网格工具 | 混合网格生成 | Advancing Front算法详解
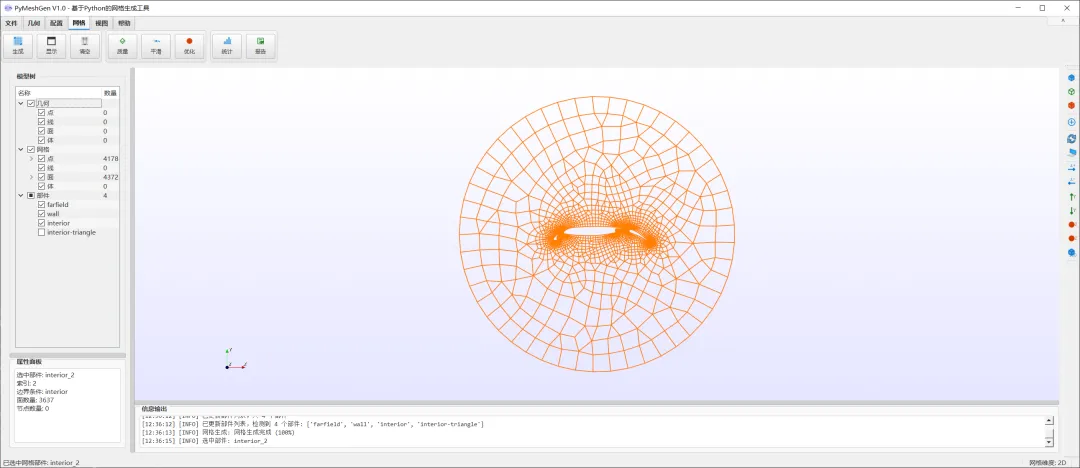
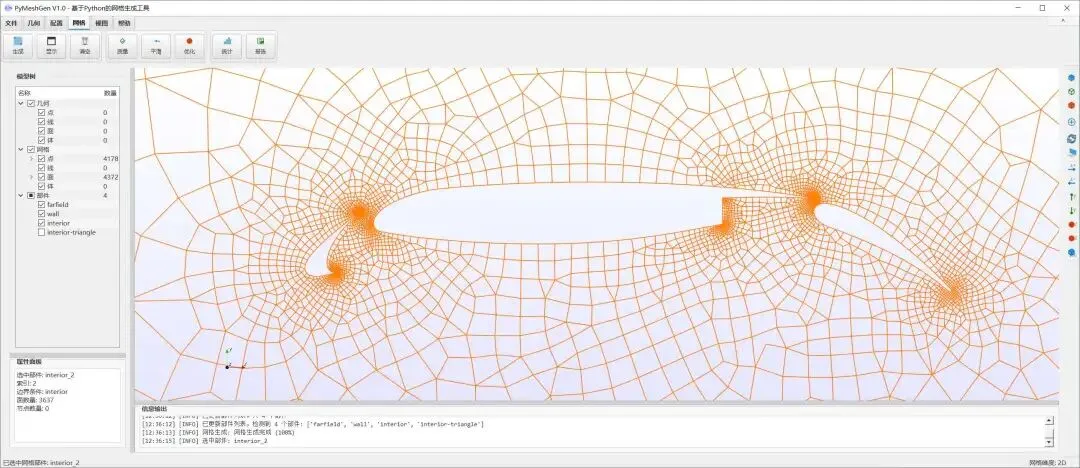
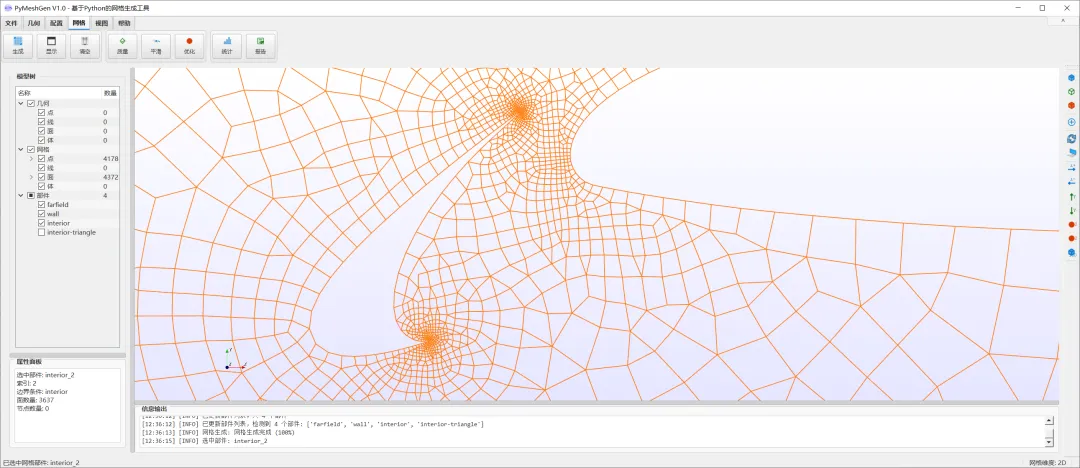
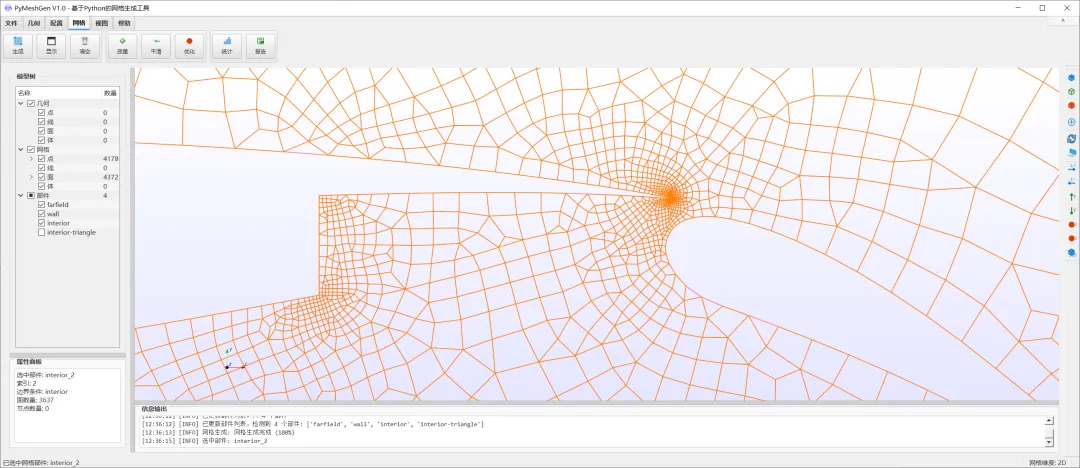
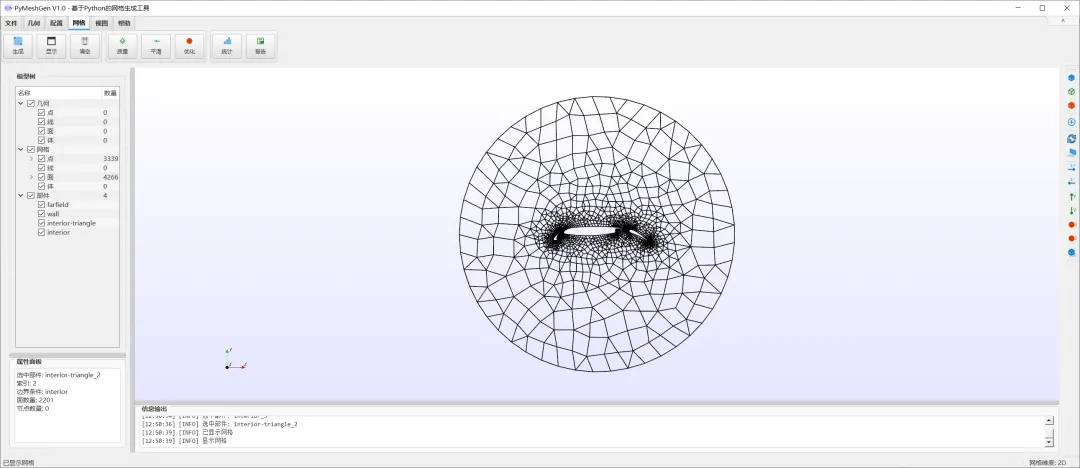
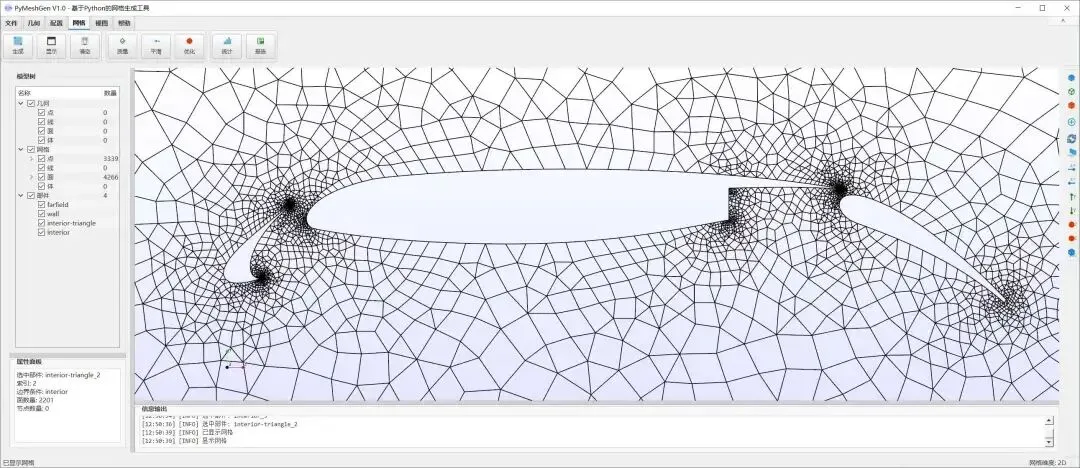
PyMeshGen 混合网格生成技术:三角形/四边形混合算法详解
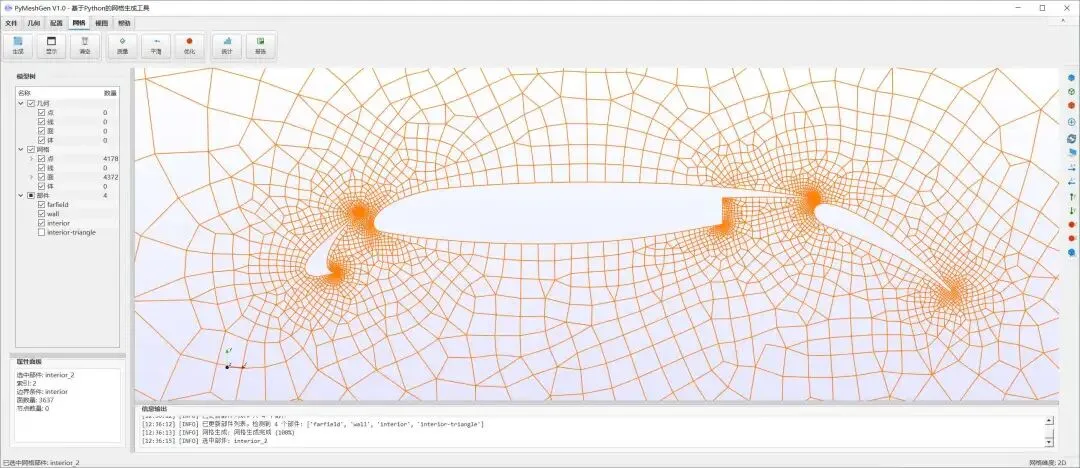
PyMeshGen 实现了基于阵面推进法(Advancing Front Method)的三角形/四边形混合网格生成算法,参考Pointwise中的Advancing Front和Advancing Front Ortho方法能够生成尽量正交的三角形/四边形混合网格和随机的三角形/四边形混合网格。本文将深入解析这一核心算法的实现原理。
一、引言
在计算流体力学(CFD)和有限元分析(FEA)中,网格类型的选择对计算效率和精度有着重要影响:
-
三角形网格:适应性强,能够处理复杂几何,但数值耗散较大 -
四边形网格:数值精度高,单元质量好,但对几何适应性较弱
混合网格(Hybrid Mesh)结合了两者的优势:
-
在规则区域使用四边形,保证计算精度 -
在复杂区域使用三角形,提高适应能力 -
整体网格质量高,生成效率好
PyMeshGen 实现了基于阵面推进法(Advancing Front Method)的三角形/四边形混合网格生成算法,参考Pointwise中的Advancing Front和Advancing Front Ortho方法能够生成尽量正交的三角形/四边形混合网格和随机的三角形/四边形混合网格。本文将深入解析这一核心算法的实现原理。
二、算法总体框架
2.1 核心思想
混合网格生成的核心思想是:优先尝试生成四边形,失败时回退到三角形。
基本流程:
当前阵面 Front ↓尝试生成四边形(2 个新点) ↓质量检查 & 碰撞检测 ├─ 成功 → 生成四边形单元 └─ 失败 → 尝试生成三角形(1 个新点) ↓ 质量检查 & 碰撞检测 ↓ 生成三角形单元这种”优先四边形,回退三角形”的策略,能够在保证网格质量的前提下,最大化四边形的比例。
2.2 算法参数
PyMeshGen 中的混合网格生成算法通过多个参数控制网格生成过程:
classAdfront2Hybrid(Adfront2):def__init__(self, boundary_front, sizing_system, ...):# 四边形搜索范围系数 self.al = 0.8# 四边形搜索范围 = 0.8 × 当地步长# 质量折扣系数 self.discount = 0.8# Pbest 质量折扣,影响候选点选择概率# 网格类型标识 self.mesh_type = 3# 1-三角形,2-直角三角形,3-混合# 四边形质量阈值 self.quality_criterion = 0.5# 低于此质量的四边形将被舍弃# 邻近检查容差 self.proximity_tol = 0.5# 阵面与节点邻近的距离容差# 阵面排序控制 self.sort_front = False# 是否按阵面长短顺序推进参数物理意义:
|
|
|
|
|
|---|---|---|---|
al |
|
|
|
discount |
|
|
|
quality_criterion |
|
|
|
proximity_tol |
|
|
|
三、四边形生成算法
3.1 新点生成策略
四边形生成需要计算2 个新顶点。PyMeshGen 采用基于局部几何特征的智能策略:
几何示意:
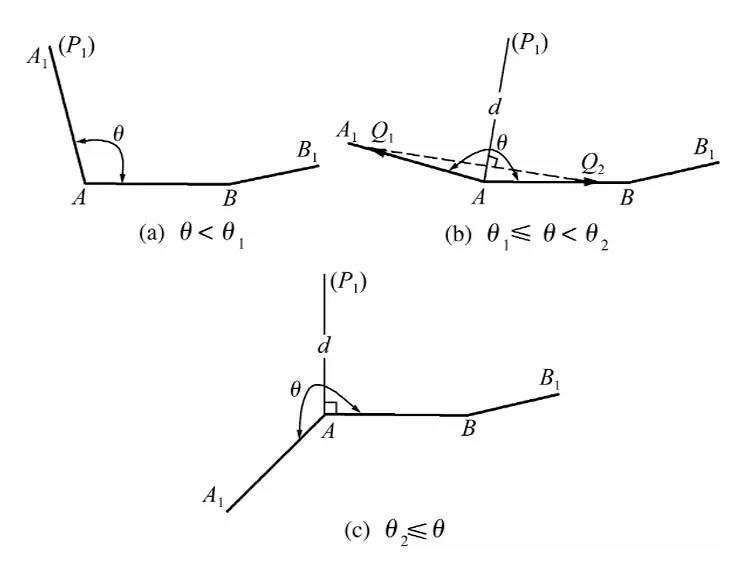
算法步骤:
defadd_new_points_for_quad(self, spacing):"""计算四边形的 2 个新顶点"""# 基准参数 theta1 = 120# 小角度阈值 theta2 = 200# 大角度阈值 l = self.base_front.length # 当前阵面长度 d0 = spacing # 当地网格步长 d = d0 # 新点推进距离# 对当前阵面的两个端点分别计算新点for base_p in self.base_front.node_elems:# 获取左右邻阵面 neighbor1, neighbor2 = base_p.node2front# 计算邻阵面夹角 angle = calculate_angle(pb.coords, base_p.coords, pa.coords)# 根据夹角选择新点位置if angle < theta1:# 小角度:使用邻阵面的另一个端点 pnew_elem = pa 或 pbelif angle > theta2:# 大角度:沿法向推进 pnew = base_p.coords + normal_vec * d pnew_elem = NodeElement(coords=pnew, ...)else:# 中等角度:沿角平分线推进 angle = np.radians(angle) / 2 rotated_vector = rotate(neighbor2.direction, angle) pnew = base_p.coords + rotated_vector * d pnew_elem = NodeElement(coords=pnew, ...)角度选择策略:
|
|
|
|
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
3.2 候选点质量评估
生成 2 个新点后,需要在候选点列表中选择最优的 2 个点构成四边形。PyMeshGen 采用多源候选 + 质量评分的方法:
候选来源:
# 四种候选情况candidate_sources = [# 1. 常规候选对:从所有候选点中任选 2 个 ([(n1, n2) for n1 in candidates for n2 in candidates if n1 != n2], 1.0),# 2. Pbest[1] 组合:一个点来自候选列表,另一个为最优候选点 1 ([(n, self.pbest[1]) for n in self.node_candidates], 0.8),# 3. Pbest[0] 组合:一个点来自候选列表,另一个为最优候选点 0 ([(self.pbest[0], n) for n in self.node_candidates], 0.8),# 4. Pbest 对:两个点都是最优候选点 ([(self.pbest[0], self.pbest[1])], 0.64), # 0.8^2]质量评分:
scored_candidates = []for candidates, discount in candidate_sources:for elem1, elem2 in candidates:# 计算四边形质量(0~1,1 为最好) quality = quadrilateral_quality2(p0, p1, elem2.coords, elem1.coords)# 应用质量折扣 discounted_quality = quality * discount# 只保留高于阈值的候选if discounted_quality > quality_criterion: scored_candidates.append((discounted_quality, elem1, elem2))# 按质量降序排序(质量高的优先)scored_candidates.sort(key=lambda x: x[0], reverse=True)质量折扣的物理意义:
-
新生成的点(Pbest)质量评分最高(折扣 1.0) -
使用已有点时,质量评分打 8 折 -
鼓励使用新生成的点,提高网格规则性
3.3 几何检查
选择候选点时,需要进行多项几何检查,确保生成的四边形合法:
检查 1:方向检查
# 确保候选点在当前阵面的左侧(阵面推进方向)ifnot (is_left2d(p0, p1, node_elem1.coords) and is_left2d(p0, p1, node_elem2.coords)):continue# 排除方向错误的候选检查 2:碰撞检测
defis_cross_quad(self, node_elem0, node_elem1):"""检查待生成四边形是否与已有单元/阵面相交"""# 检查新边是否与已有阵面相交 new_edges = [ LineSegment(node_elem0, p0), LineSegment(node_elem1, p1), LineSegment(node_elem0, node_elem1), ]for front in self.front_candidates: front_line = LineSegment(front.node_elems[0], front.node_elems[1])if any(front_line.is_intersect(edge) for edge in new_edges):returnTrue# 与阵面相交# 检查是否与已有单元相交 cell_to_add = Quadrilateral(p0, p1, node_elem1, node_elem0)for existed_cell in self.cell_candidates:if existed_cell.is_intersect_quad(cell_to_add):returnTrue# 与单元相交returnFalse检查 3:邻近检查
defproximity_check(self, node_elem1, node_elem2, distance):"""检查新增阵面是否过于靠近已有节点"""# 检查新边到已有节点的距离 edges = [ (node_elem1, node_elem2), (p0, node_elem1), (p1, node_elem2), ]for edge in edges:for node in self.node_candidates: dis = point_to_segment_distance(node.coords, edge[0].coords, edge[1].coords)if dis < distance:returnTrue# 距离太近# 检查新节点到已有阵面的距离 nodes = [node_elem1, node_elem2]for node in nodes:for front in self.front_candidates: dis = point_to_segment_distance(node.coords, front.node_elems[0].coords, front.node_elems[1].coords)if dis < distance:returnTrue# 距离太近returnFalse检查 4:尺寸检查
defsize_too_big(self, node_elem1, node_elem2, spacing):"""检查四边形面积是否过大""" p0 = self.base_front.node_elems[0].coords p1 = self.base_front.node_elems[1].coords# 计算四边形面积 area = quadrilateral_area(p0, p1, node_elem2.coords, node_elem1.coords)# 面积阈值 = 1.3² × spacing²if area > 1.69 * spacing * spacing:returnTrue# 面积过大returnFalse3.4 最优选择
通过所有检查后,选择质量最高的候选对:
self.pselected = Noneself.best_flag = [False] * 2for quality, node_elem1, node_elem2 in scored_candidates:# 依次进行各项检查ifnot is_left2d(...):continueif is_cross_quad(...):continueif proximity_check(...):continueif size_too_big(...):continue# 所有检查通过,选择该候选对 self.pselected = [node_elem1, node_elem2]break四、三角形生成算法
4.1 回退机制
当四边形生成失败时,算法自动回退到三角形生成:
defgenerate_elements(self):while self.front_list:# ... 前置处理# 尝试生成四边形 self.add_new_points_for_quad(spacing) self.search_candidates(self.base_front.al * spacing) self.select_point_for_quad(spacing)# 四边形生成失败,尝试生成三角形 self.add_new_point_for_tri(spacing) self.select_point_for_tri()# 更新数据 self.update_data_quad() # 如果生成了四边形 self.update_data_tri() # 如果生成了三角形回退条件:
-
找不到满足质量要求的四边形候选点 -
所有候选点都未通过几何检查 -
碰撞检测或邻近检查失败
4.2 三角形生成逻辑
三角形生成与四边形类似,但只需要1 个新点:
defadd_new_point_for_tri(self, spacing):"""如果四边形生成失败,尝试生成三角形"""if self.pselected isnotNone:return# 四边形已成功,不需要生成三角形 self.mesh_type = 1# 标记为三角形 self.add_new_point(spacing) # 生成 1 个新点defselect_point_for_tri(self):"""选择点生成三角形"""if self.pselected isnotNone:return# 四边形已成功 self.select_point() # 从候选点中选择最优的 1 个点4.3 数据更新
生成三角形后的数据更新:
defupdate_data_tri(self):if self.pselected isNone:return# 没有生成三角形if isinstance(self.pselected, list) and len(self.pselected) == 2:return# 已生成四边形,不需要更新三角形数据# 更新阵面 new_front1 = Front( node_elem1=self.base_front.node_elems[0], node_elem2=self.pselected, ... ) new_front2 = Front( node_elem1=self.pselected, node_elem2=self.base_front.node_elems[1], ... ) self.update_fronts([new_front1, new_front2])# 更新单元 new_cell = Triangle( p1=self.base_front.node_elems[0], p2=self.base_front.node_elems[1], p3=self.pselected, part_name="interior-triangle", idx=self.num_cells, ) self.update_cells(new_cell)五、数据结构更新
5.1 四边形数据更新
defupdate_data_quad(self):# 检查是否生成了四边形if (self.pselected isNoneornot isinstance(self.pselected, list) or len(self.pselected) != 2):return# 更新节点 self.update_nodes()# 更新阵面(生成 3 个新阵面) new_front1 = Front(node_elem1=p0, node_elem2=pselected[0], ...) new_front2 = Front(node_elem1=pselected[1], node_elem2=p1, ...) new_front3 = Front(node_elem1=pselected[0], node_elem2=pselected[1], ...) self.update_fronts([new_front1, new_front2, new_front3])# 更新单元 new_cell = Quadrilateral( p1=self.base_front.node_elems[0], p2=self.base_front.node_elems[1], p3=self.pselected[1], # 注意节点顺序 p4=self.pselected[0], part_name="interior", idx=self.num_cells, ) self.update_cells(new_cell)节点顺序:
P0 (base_front 左端点) |P1 (base_front 右端点) |P3 (pselected[1]) |P2 (pselected[0])5.2 阵面更新策略
每次生成单元后,需要:
-
删除当前阵面(base_front) -
添加新生成的阵面 -
重构 node2front 关系
defreconstruct_node2front(self):"""重构 node2front 列表""" num_neighbors = 2for front in self.front_list:for node_elem in front.node_elems:if len(node_elem.node2front) == 0: node_elem.node2front = [None] * num_neighbors# node_elem 在 front 中是起点,则 front 是在后面for i, node_elem in enumerate(front.node_elems): node_elem.node2front[(i + 1) % num_neighbors] = front# 检查每个节点的邻阵面数量是否为 2for front in self.front_list:for node_elem in front.node_elems:ifnot all(node_elem.node2front):raise ValueError(f"节点 {node_elem.idx} 的邻阵面数量不足 2")六、优化策略
6.1 阵面排序推进
为提高网格质量,PyMeshGen 支持按阵面长短顺序推进:
defcalculate_gap_criterion(self):"""计算不同部件阵面之间的最小距离"""if self.sort_front:return# 已开启排序# 每间隔一定单元数判断一次if self.num_cells % self.progress_interval != 0:return# 计算安全距离 safe_distance_sq = 0.3 * (width + height) / 2 safe_distance_sq *= safe_distance_sqfor front1 in self.front_list:for front2 in self.front_list:if front1.part_name != front2.part_name:# 检查不同部件阵面之间的距离if fast_distance_check(p0, p1, q0, q1, safe_distance_sq): info("部件之间阵面最小距离较小,按阵面长短顺序推进生成...") self.sort_front = Truereturn# 检查阵面长度比例if min(front1.length, front2.length) / max(front1.length, front2.length) > 0.8: info("部件之间阵面长度已接近,按阵面长短顺序推进生成...") self.sort_front = Truereturn排序推进的优势:
-
优先处理长阵面,避免长阵面残留到最后 -
减少网格畸变,提高整体质量 -
适用于多部件复杂几何
6.2 质量评估函数
四边形质量评估采用综合指标:
quality = quadrilateral_quality2(p0, p1, elem2.coords, elem1.coords)质量评估考虑以下因素:
-
内角偏差:越接近 90° 越好 -
边长比:四边长度越接近越好 -
面积:避免过小或过大的单元 -
雅可比:等参变换的雅可比行列式
七、算法性能
7.1 生成效率
混合网格生成算法的效率优势:
|
|
|
|
|
|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.2 质量保证
通过多层检查机制保证网格质量:
质量保障体系:├── 候选点质量评分 (quadrilateral_quality2)├── 几何方向检查 (is_left2d)├── 碰撞检测 (is_cross_quad)├── 邻近检查 (proximity_check)└── 尺寸检查 (size_too_big)八、总结
PyMeshGen 的混合网格生成算法具有以下特点:
-
智能选择:优先四边形,失败回退三角形 -
质量优先:多源候选 + 质量评分,确保最优选择 -
严格检查:方向、碰撞、邻近、尺寸多层检查 -
灵活适应:根据局部几何自动调整策略 -
高效推进:支持阵面排序,提高整体质量
通过合理的参数设置和优化策略,混合网格算法能够生成高质量的计算网格,为 CFD/FEA 计算提供可靠的基础。
参考文献:
-
陈建军,郑建靖,季廷炜,等.前沿推进曲面四边形网格生成算法[J].计算力学学报,2011,28(05):779-784.
👇点击左下方“阅读原文”访问项目!
全文结束,感谢观看,创作不易。
😁😁
欢迎关注、留言、点赞、分享、推荐!
👇👇
【往期回顾】
我用DeepSeek-V3.1做了一下PDE编程求解,来看看结果怎么样