 夜雨聆风
夜雨聆风





FAST特征提取技术文档,
FAST特征提取技术文档
一、算法概述
1.1 算法定义
FAST全称 Features from Accelerated Segment Test(加速分段测试特征提取),由 Edward Rosten 和 Tom Drummond 于 2006 年提出,是计算机视觉领域经典的角点特征快速提取算法。
1.2 核心定位
摒弃梯度、矩阵、卷积等复杂运算,仅通过像素灰度值对比实现特征检测,主打超高检测速度,适用于实时视觉、低算力设备场景,是 ORB 等算法的核心组成。
二、核心原理
FAST 核心逻辑:
一个像素若为角点,其周围圆周范围内必有连续多个像素与它灰度差异显著。
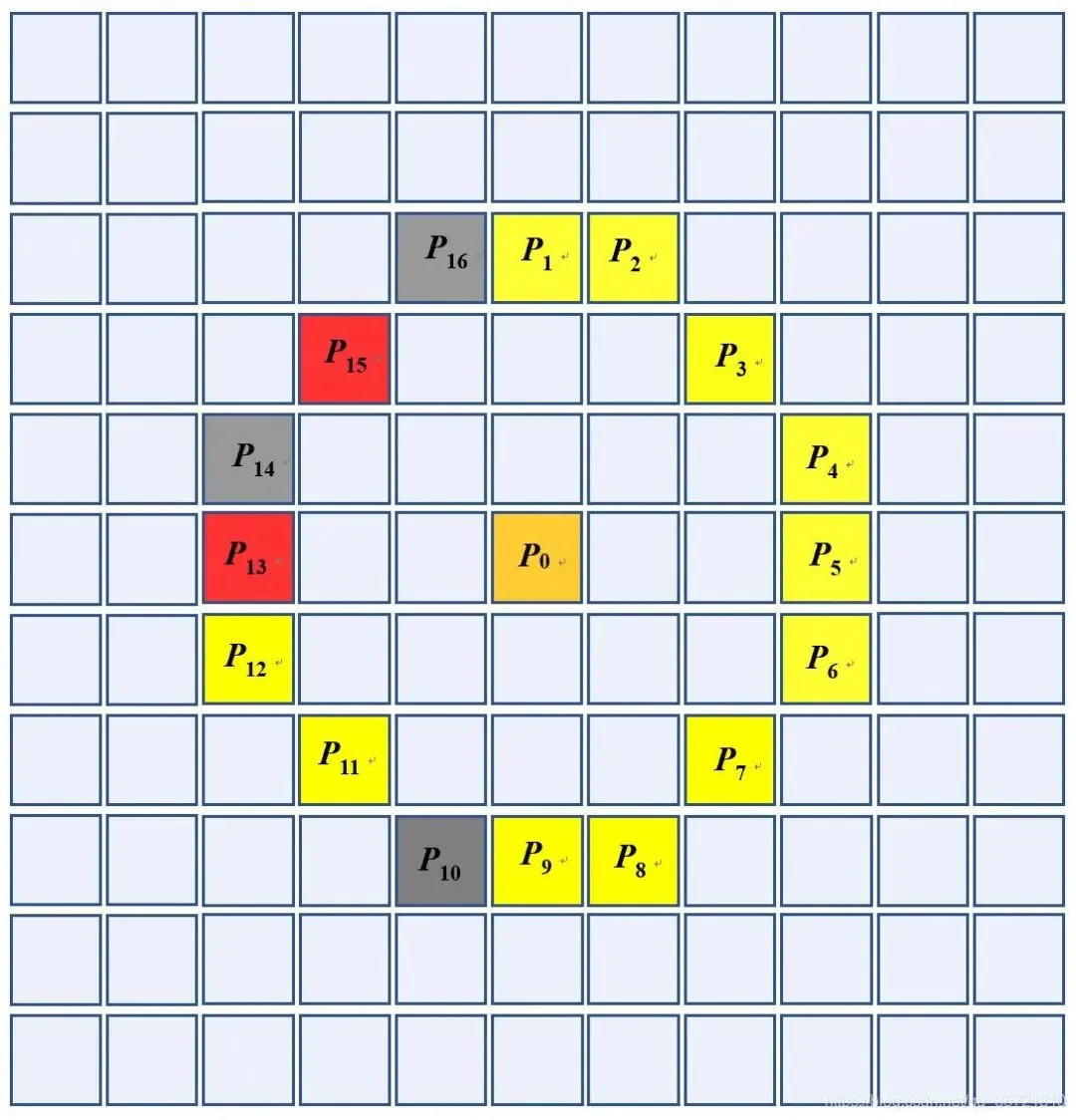
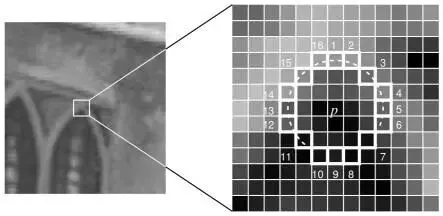
1. 选取待检测像素 P,灰度值记为 Ip。
2. 以 P 为中心,画半径 3 像素的 Bresenham 圆,圆周上有 16 个像素(P1~P16)。
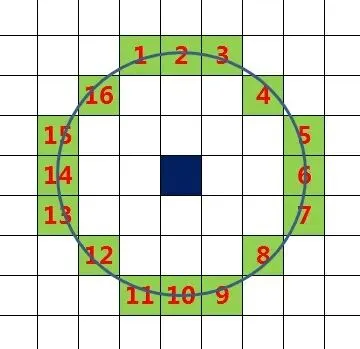
3. 设定灰度差异阈值 t,判断差异是否显著。
4. 若 16 个点中存在连续 9 个或 12 个像素满足:- 全部 > Ip + t(明显更亮)
– 或全部 < Ip − t(明显更暗)
则 P 判定为角点(特征点)。
三、完整提取流程
步骤1:快速粗筛选(提速关键)
只先检测 4 个关键位置:P1、P5、P9、P13(上、右、下、左)。
– 若少于 3 个像素与 P 差异 > t → 直接判定非角点,跳过后续。
– 若≥3 个 → 进入精细检测。
步骤2:精细角点检测
完整遍历 16 个圆周像素,验证是否存在连续 9/12 个满足灰度差条件,标记为候选角点。
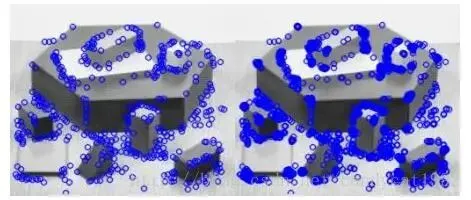
步骤3:非极大值抑制(去重、去密集)
解决角点局部聚集、重复检测问题:
1. 计算每个候选点打分值 V:V = 该点与 16 个圆周像素灰度绝对差之和。
2. 局部邻域内只保留 V 最大的点,剔除其余冗余点。
步骤4:可选优化(ID3 决策树)
用机器学习对 16 个像素分类训练,进一步降低误检率。
四、算法优缺点分析
4.1 优势
1. 速度极快:无复杂数学,仅灰度对比+快速筛选,远快于 Harris、SIFT、SURF。
2. 实现简单:逻辑清晰、代码轻量,OpenCV 直接可用。
3. 低功耗适配:适合嵌入式、移动端、边缘设备等低算力平台。
4.2 不足
1. 抗噪声弱:噪声易引发伪特征。
2. 无尺度不变性:图像缩放后效果变差。
3. 无旋转不变性:旋转后检测不稳定。
4. 分布不均:纹理密处点过多、稀疏处点缺失。
五、典型应用场景
1. 视觉 SLAM:无人机、自动驾驶、AR/VR 实时定位建图。
2. 实时目标跟踪:安防监控、运动追踪。
3. 图像快速拼接:短时间匹配特征点实现无缝拼接。
4. 移动端视觉:扫码、拍照防抖、人脸解锁。
5. ORB 特征:作为 ORB 核心,结合 BRIEF 描述子,兼顾速度与鲁棒性。

六、总结
FAST 以极致速度为核心优势,用极简逻辑实现角点快速提取,完美解决实时视觉的效率与算力痛点。
虽在鲁棒性、不变性上有缺陷,但可通过尺度金字塔、旋转补偿优化,是实时视觉领域不可或缺的基础算法,也是入门特征提取的优选案例。