 夜雨聆风
夜雨聆风





下载链接
原创代码,包运行成功,可联系我获取讲解、定制多无人机协同巡逻仿真程序实现了1架长机与3架僚机的菱形编队飞行控制。系统采用集中式调度与分布式执行架构,通过串级PID控制器实现三维轨迹跟踪。
文章目录
-
程序介绍 -
物理模型与坐标系 -
长机-僚机协同策略 -
串级 PID 控制器逻辑 -
关键特性总结 -
运行结果 -
MATLAB源代码
程序介绍
物理模型与坐标系
程序内置了非线性六自由度(6-DOF)无人机动力学模型。通过旋转矩阵 kd_lin 与旋转阻尼 kd_ang),确保了仿真环境的逼真度。
长机-僚机协同策略
- 集中式路径规划
:地面站预设 leader_wps,长机根据当前位置与目标的距离自动判定并切换下一航点。 - 分布式队形反馈
:僚机的期望位置不仅取决于长机广播的坐标和固定的 formation_offset,还引入了formation_gain。 - 计算公式
-
这种设计增强了僚机在长机剧烈转向时的跟随速度。
串级 PID 控制器逻辑
每一架无人机均独立运行一套级联控制算法:
- 外环(位置环)
输入空间误差,输出期望加速度。 - 姿态解算层
将期望加速度解算为目标横滚角(Roll)和俯仰角(Pitch)。 - 内环(姿态环)
输入角度误差,输出控制力矩(Torque)。
关键特性总结
- 角度归一化
使用 angle_wrap处理航向角突变问题。 - 抗饱和处理
对位置积分、姿态角、推力及力矩均设置了 clamp限幅,防止物理上的不可实现性导致的数值发散。
运行结果
本程序模拟了 1架长机(Leader)+ 3架僚机(Follower) 的协同巡逻任务。系统运行后将生成三张关键的分析图表:
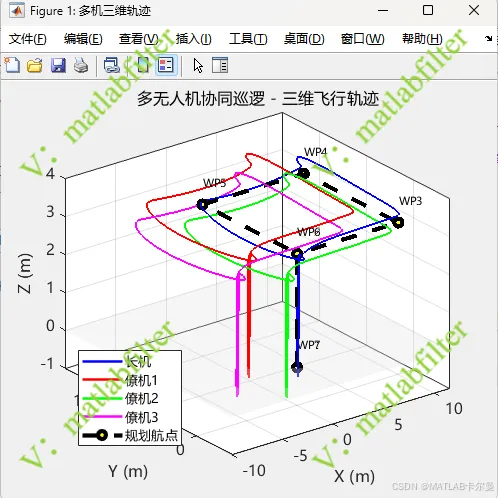
- 多无人机三维轨迹图
直观展示四架无人机如何维持菱形编队完成起飞、前飞、直角转向及返航降落的全过程。图中清晰标出了长机的规划航点(Waypoints)。
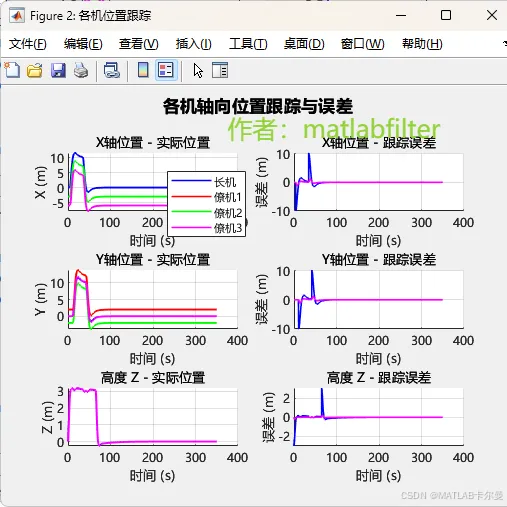
- 轴向位置跟踪与误差图
详细对比了各架无人机在 X、Y、Z 三个轴向上的实际位置与期望位置,展示了级联 PID 控制器在高动态转向时的鲁棒性。
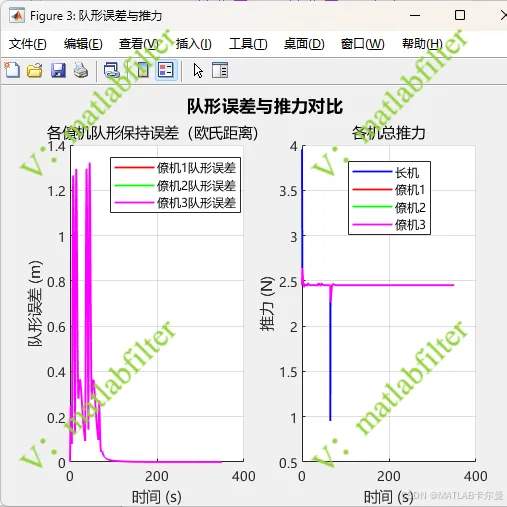
- 队形误差与推力对比图
- 左侧
记录了三架僚机相对于长机的实时位置偏差(欧氏距离),验证了在分布式反馈增益作用下,编队误差能迅速收敛至厘米级。 - 右侧
展示了各机电机的总推力输出,反映了物理限幅对系统的实际约束。
- 命令行截图
MATLAB源代码
同款代码,也可直接下载:

如需帮助,或有导航、定位滤波相关的代码定制需求,可联系作者:
